-
8/3/2019 A Novel Adaptive Synchronization of Lus Chaotic
System
1/7
European Journal of Scientific Research
ISSN 1450-216X Vol.45 No.4 (2010), pp.630-636
EuroJournals Publishing, Inc. 2010
http://www.eurojournals.com/ejsr.htm
A Novel Adaptive Synchronization of Lus Chaotic System
K. Ratchagit
Department of Mathematics, Faculty of Science
Maejo University, Chiang Mai 50290, Thailand
E-mail: [email protected]: +66-053-873000; Fax:
+66-053-873000
Abstract
In this paper, we study Lus system, and we study the stability
of equilibrium point
of Lus system. Then, we study chaos synchronization of Lus
system by using adaptive
control methods.
Keywords: Lus system; Synchronization; Adaptive control.
1. IntroductionChaos in control systems and controlling chaos in
dynamical systems have both attracted increasing
attention in recent years. A chaotic system has complex
dynamical behaviors that possess some special
features, such as being extremely sensitive to tiny variations
of initial conditions, having boundedtrajectories in the phase
space. Controlling chaos has focused on the nonlinear systems such
as a Lus
system.
Lus system was first introduced in [2] which is described
by.
.
.
( )x a y x
y xz cy
z xy bz
=
= +
=
(1.1)
where , , x y z are state variables, , ,a b c are positive
constants.
The objective of this paper is as follow. We investigate
adaptive synchronization for Lus
system when the parameters of the drive system are fully unknown
and different with those of theresponse system.
2. Synchronization of the Lus SystemConsider two nonlinear
systems:
( , ) (*)
( , ) ( , , ) (**)
x f t x
y g t y u t x y
=
= +
&
&
Where , , , [ , ],n r n nx y f g C + [ , ], 1,r n n nu C r+ + is
the set of non-negative
real numbers. Assume that (*) is the drive system, (**) is the
response system, and ( , , )u t x y is the
control vector.
Definition 2.1. Response system and drive system are said to be
synchronic if for any initial
conditions 0 0( ), ( ) ,n
x t y t lim ( ) ( ) 0.t
x t y t +
=
-
8/3/2019 A Novel Adaptive Synchronization of Lus Chaotic
System
2/7
A Novel Adaptive Synchronization of Lus Chaotic System 631
In this section, we consider adaptive synchronization Lus
systems. This approach cansynchronize the chaotic systems when the
parameters of the drive system are fully unknown and
different with those of the response system. Assume that there
are two Lus systems such that the drive
system (with the subscript 1) is to control the response system
(with the subscript 2). The drive andresponse system are given,
respectively, by
.
1 1 1
.
1 1 11
.
1 1 1 1
( ) x a y x
y x z cy
z x y bz
=
= +
=
(2.1)
where the parameters , ,a b c are unknown or uncertain,
and..
2 1 2 2 1
.
2 2 2 1 2 2
.
2 2 2 1 2 3
( ) x a y x u
y x z c y u
z x y b z u
=
= +
=
(2.2)
where 1 1 1, ,a b c are parameters of the response system which
need to be estimated, and [ ]T
1 2 3, ,u u u u= is
the controller we introduced in (2.2). We choose
1 1 2 1
2 2 2 1
3 3 2 1
( )( )
( )
x
y
z
u k e a x xu k e c y y
u k e b z z
= = +
=
(2.3)
where , , x y ze e e are the error states which are defined as
follows:
2 1
2 1
2 1
x
y
z
e x x
e y y
e z z
=
=
=
and
1 2 2
1 2
1 2
( )a x x
b z
c z
a f x e y e
b f y e
c f x e
= =
= =
= =
&
&
&
(2.4)
where 1 2 3, , 0k k k and , , are positive real constants.
Theorem 2.1. Let 1 2 3, , 0k k k be properly chosen so that the
following matrix inequality holds,
1
2
3
1( 1) 0
2
1 1( 1) 1 (1 ) 0
2 2
10 (1 )
2
k a a
P a k b
b k
+ = + + >
(2.5)
or 1 2 3, ,k k k can be chosen so that the following
inequalities holds,
(ii) 1 0 A k a= > (iii) 22 1( 1) ( 1) 0
4 B A k a= + + >
(iv) 2 32 3 1( 1) (1 ) ( 1) 0.4 4
kC A k k A b a= + + >
Then the two Lus system (2.1) and (2.2) can be synchronized
under the adaptive controls (2.3)
and (2.4).
Proof. It is easy to see from (2.1) and (2.2) that the error
system is
-
8/3/2019 A Novel Adaptive Synchronization of Lus Chaotic
System
3/7
632 K. Ratchagit
1 2 2 1 1 1
2 2 1 2 1 1 1 2
2 2 1 2 1 1 1 3
( ) ( )x
y
z
e a y x a y x u
e x z c y x z cy u
e x y b z x y bz u
=
= + +
= +
&
&
&
(2.6)
Let 1 1 1, , .a b ce a a e b b e c c= = = Choose the Lyapunov
function as follows:
2 2 2 2 2 21 1 1 1( ) .
2x y z a b cV t e e e e e e
= + + + + +
Then the differentiation ofV along trajectories of (2.6) is
[ ]
[ ]
[ ]
[ ] [ ]
[ ]
1 2 2 1 1 1
2 2 1 2 1 1 1 2
2 2 1 2 1 1 1 3
1 2 1 2 2 1 2 1 2 2
1 1 2 2 2 1 2 1
1 1 1
( ) ( )
1 1 1
= + + + + +
=
+ + +
+ +
+ + +
= + +
+ + +
& & & & & & &x x y y z z a a b b c
c
x
y
z
a a b b c c
x x
y
V e e e e e e e e e e e e
e a y x a y x u
e x z c y x z cy u
e x y b z x y bz u
e f e f e f
e a y ay ay ay e a x ax ax ax
e x z x z x z x z e [ ]
[ ] [ ]
1 2 1 2 2
2 2 1 1 1 2 1 2 1 1 2 1 1 1 1
1 2 3
1 1 1
+
+ + + +
+ + +
y
z z
x y z a a b b c c
c y cy cy cy
e x y x y x y x y e bz b z b z b z
e u e u e u e f e f e f
2 2 1 2
2 2
2
2
2 2 1 1 2 1
2 2
2 3 2 1
2 2 21 2 3
2
( )
( ) ( )
1( )
1 1
( ) ( 1) ( 1)
1(1 )
= + +
+ +
+ + +
+
+ +
= + + +
+ + +
a x x y a x x a x
x x y y y z b z y z
c z z x x
y z z a a
b b c
x y z x y
y z a a
y e e ae e e e x x e x e e
e e e e e e y e e be e
x e e c x x e k e x x e
k e k e c x x e e f
e f e f
k a e k e k e a e e
b e e e f y e 2
2 2
2 2 2
1 2 3
1 1
( ) ( 1) ( 1)
(1 )
+
+ + +
+ + +
+
=
x x x
b b z c c z
x y z x y
y z
T
x e e
e f y e e f x e
k a e k e k e a e e
b e e
e Pe
whereT
x y ze e e e = and P is as in (2.5). Since ( )V t is positive
definite and ( )V t& is negative
semidefinite, it follows that 1 1 1, , , , , . x y ze e e a b c
L From ( ) ,T
V t e Pe & we can easily show that the square
of , , x y ze e e are integrable with respect to t, namely, 2, ,
. x y ze e e L From (2.6), for any initial conditions,
we have ( ), ( ), ( ) . x y ze t e t e t L& & & By
the well-known Barbalats Lemma, we conclude that ( , , ) (0,0,0) x
y ze e e
as .t + Therefore, in the closed-loop system, 2 1 2 1 2 1( ) (
), ( ) ( ), ( ) ( )x t x t y t y t z t z t as .t + This
implies that the two Lus systems have synchronized under the
adaptive controls (2.3) and (2.4).
-
8/3/2019 A Novel Adaptive Synchronization of Lus Chaotic
System
4/7
A Novel Adaptive Synchronization of Lus Chaotic System 633
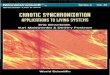
Numerical Simulations
The numerical simulations are carried out using the Fourth-order
Runge-Kutta method. The initial
states are 1 1 1(0) 0.65, (0) 0, (0) 0 x y z= = = for the drive
system and 2 (0) 0.2, x = 2 2(0) 0.1, (0) 0.1y z= = forthe response
system. The parameters of the drive system are 5, 10, 0.5.a b c= =
= The control parameters
are chosen as follows 1 2 35, 50, 21k k k= = = which satisfy
(2.5). Choose 1. = = = The initial values of
the parameters 1 1 1, ,a b c are all chosen to be 0. As shown in
Fig. 1, the response system synchronizes
with the drive system. The changing parameters of 1 1 1, ,a b c
are shown in Fig. 2-4.
Figure 1: Synchronization error ( , , ) x y z
e e e for system (2.1) and (2.2) with time t.
Figure 2: Changing parameter1a of the system (2.2) with time
t.
-
8/3/2019 A Novel Adaptive Synchronization of Lus Chaotic
System
5/7
634 K. Ratchagit
Figure 3: Changing parameter1b of the system (2.2) with time
t.
Figure 4: Changing parameter1c of the system (2.2) with time
t.
-
8/3/2019 A Novel Adaptive Synchronization of Lus Chaotic
System
6/7
A Novel Adaptive Synchronization of Lus Chaotic System 635
3. Summary and Concluding RemarksIn this paper, we give
sufficient conditions for stability of equilibrium points of
synchronization of two
Lus systems using adaptive control which control the chaotic
behavior of Lus system to its
equilibrium points. Numerical Simulations are also given to
verify results we obtained.
AckhowledgmentThis work was supported by the Thai Research Fund
Grant, the Higher Education Commission and
Maejo University, Thailand. The author would like to thank the
anonymous referee for his/her valuablecomments and remarks which
greatly improved the final version of the paper.
References[1] K. Abdelwahab and R.B. Guenther, An introduction
to numerical methods a MATLAB
approach, Chapman and Hall/CRC, New York, 2002.[2] S. Barnett
and R.G. Cameron, Introduction to Mathematical Control Theory,
Oxford,
Clarendon Press, 1985.
[3] J. Lu, G. Chen, A new chaotic attractor coined, Int. J.
Bifurc. Chaos 12 (2002) 659-661.[4] V.N. Phat, Constrained Control
Problems of Discrete Processes, World Scientific Publisher,
Singapore-NewJersey-London,1996.
[5] V.N. Phat, Introduction to Mathematical Control Theory,
Hanoi National University Publisher,Hanoi, 2001.
[6] VN Phat, J. Jiang, A.V. Savkin and I. Petersen, Robust
stabilization of linear uncertain discrete-time systems via a
limited communication channel. Systems and Control Letters.
53(2004),
347-360 (SCI)[7] VN Phat and J. Jiang, Feedback stabilization of
nonlinear discrete-time systems via a digital
communication channel. Int. J. of Math. and Math. Sci., 1(2005),
43-56.
[8] VN Phat, Robust stability and stabilizability of uncertain
linear hybrid systems with statedelays. IEEE Trans. on CAS II,
52(2005), 94-98 (SCI)
[9] VN Phat, N.M. Linh and T.D. Phuong, Sufficient conditions
for strong stability of non-lineartime-varying control systems with
state delays. Acta Math. Vietnamica, 30(2005), 69-86.[10] VN Phat
and A.V. Savkin, Robust set-valued state estimation for linear
uncertain systems inHilbert spaces. Nonl. Func. Anal. Appl.,
10(2005), 285-298.
[11] VN Phat and S. Pairote, Global stabilization of linear
periodically time-varying switchedsystems via matrix inequalities.
J. Control Theory Appl. 1(2006), 26-31.
[12] P. Niamsup and VN Phat, Stability of linear time-varying
delay systems and applications tocontrol problems, J. Comput.
Appll. Math. 194(2006), 343-356 .
[13] VN Phat, Global stabilization for linear continuous
time-varying systems Appl. Math. Comput.175(2006), 1730-1743.
[14] VN Phat and P. Niamsup, Stabilization of linear
non-autonomous systems with norm boundedcontrols. J. Optim. Theory
Appl., 131(2006), 135-149.
[15] S. Pairote and VN Phat, Exponential stability of switched
linear systems with time-varyingdelay, Elect. J. Diff. Equations,
59(2007), 1-10
[16] Q.P. Ha, H. Trinh and VN Phat, Design of Reduced-Order
Observers for Global State FeedbackControl of Multi-Agent Systems,
Int. J. of Aut. Control, N2/3, 1(2007), 165-181.
[17] VN Phat and PT Nam, Exponential stability and stabilization
of uncertain linear time-varyingsystems using parameter dependent
Lyapunov function. Int. J. of Control, 80(2007), 1333-
1341.[18] P.T. Nam and VN Phat, Robust exponential stability and
stabilization of linear uncertain
polytopic time-delay systems. J. Control Theory Appl., 6(2008),
163-170
[19] P. Niamsup, K. Mukdasai and VN Phat, Linear uncertain
non-autonomous time-delay systems:Stability and stabilizability via
Riccati equations. Elect. J. Diff. Equations., 26(2008), 1-10.
-
8/3/2019 A Novel Adaptive Synchronization of Lus Chaotic
System
7/7
636 K. Ratchagit
[20] VN Phat, D.Q. Vinh and N. S. Bay, L2stabilization and H
control for linear non-autonomoustime-delay systems in Hilbert
spaces via Riccati equations, Adv. in Nonl. Var. Ineq.,
11(2008),
75-86.
[21] P. Niamsup and K. Mukdasai and VN Phat, Improved
exponential stability for time- varyingsystems with nonlinear
delayed perturbations, Appl. Math. Comput., 204(2008), 490-495.
[22] VN Phat and Q.P. Ha, New characterization of
stabilizability via Riccati equations for LTVsystems. IMA J. Math.
Contr. Inform., 25(2008), 419-429.
[23] PT Nam and VN Phat, An improved stability criterion for a
class of neutral deferentialequations. Appl. Math. Letters,
22(2009), 31-35.
[24] VN Phat, T. Bormat and P. Niamsup, Switching design for
exponential stability of a class ofnonlinear hybrid time-delay
systems, Nonlinear Analysis: Hybrid Systems, 3(2009), 1-10
[25] VN Phat and PT Nam, Robust stabilization of linear systems
with delayed state and control, J.Optim. Theory Appl., 140(2009),
287-299.
[26] L.V. Hien, Q.P. Haand VN Phat, Stability and stabilization
of switched linear dynamic systemswith time delay and uncertainties
Appl. Math. Comput, 210(2009), 223-231.
[27] VN Phat and LV Hien, An application of Razumikhin theorem
to exponential stability forlinear non-autonomous systems with
arbitrary time-varying delays, Appl. Math. Letters,22(2009),
1412-1417.
[28] LV Hien and VN Phat, Exponential stability and
stabilization of a class of uncertain lineartime-delay systems, J.
of the Franklin Institute, 346(2009), 611-625.[29] LV Hien and VN
Phat, Delay feedback control in exponential stabilization of linear
time-
varying systems with input delay, IMA J. Math. Contr. Inform.,
26(2009), 163-177.
[30] LV Hien and VN Phat, Exponential stabilization for a class
of hybrid systems with mixeddelays in state and control, Nonlinear
Analysis: Hybrid Systems, 3(2009), 259-265.
[31] VN Phat, Memoryless H controller design for switched
nonlinear systems with mixed time-varying delays, Int. J. of
Control, 82(2009), 1889-1898,
[32] VN Phat and Q.P. Ha, H control and exponential stability
for a class of nonlinear non-autonomous systems with time-varying
delay, J. Optim. Theory Appl., 142(2009), 603-618.
[33] P. Niamsup and VN Phat, H optimal control of LTV systems
with time-varying delay viacontrollability approach, ScienceAsia,
35(2009), 284-289.
![ACTAS DE LA X RECSI 1 On the inadequacy of the logistic ... · The first type of chaotic cryptosystems is based on the chaotic synchronization tech-nique [1], whereas digital chaotic](https://img.pdfslide.us/doc/110x75/5d5c108c88c9931e238b5dcf/actas-de-la-x-recsi-1-on-the-inadequacy-of-the-logistic-the-rst-type.jpg)



![Synchronization of Two Fractional-Order Chaotic Systems ...downloads.hindawi.com/journals/jcse/2017/9562818.pdf · in [34, 35], and, furthermore, for fractional-order chaotic systems,](https://img.pdfslide.us/doc/110x75/5f8d11c07c3bc0232b547316/synchronization-of-two-fractional-order-chaotic-systems-in-34-35-and-furthermore.jpg)