Embed Size (px)
Citation preview
8/6/2019 A New Efficient Algorithm for Fitting Rectangular
http://slidepdf.com/reader/full/a-new-efficient-algorithm-for-fitting-rectangular 1/4
A New Efficient Algorithm for Fitting RectangularBoxes and Cubes in 3D
Frank Ditrich, Herbert Suesse and Klaus Voss
Friedrich-Schiller-University Jena, Department of Computer Science
Ernst-Abbe-Platz 2
D-07737 Jena, Germany
Abstract- In this paper, we introduce a new approach for fitting
rectangular boxes and cubes given as a set of voxels in a three-
dimensional voxel space. This extends our work on fitting rectan-
gles and squares described in [6] to three dimensions. It is also
based on our normalization method published in [4] and [5]. Here
we also encounter the problem of normalizing the rotation as it is
necessary for rectangles and squares, but here we have two degen-
erate cases to handle. The first one are cubes, the second one are
rectangular boxes with two edges of equal length and the length
of the third edge different from them. Our method delivers good
fitting results, even if the boxes are heavily distorted for example
by cutting-off vertices.
I. INTRODUCTION
In [6] we introduced a new fitting procedure for rectangles and
squares. In contrast to other authors the objects to be fitted are
described as a point set inside a closed region (whereas often
objects are represented by points lying on their contour). Fur-
thermore, it uses the method of simultanouosly normalizing the
transformation and the shape of the object using area moments
as features, as it can be found in [4] and [5]. We used moments
up to fourth order for the optimization of the shape and to handle
the degenerate case where the rectangle becomes a square. In
this case, the second order moments are not sufficient to prop-
erly normalize the rotation. Advantages of this method are thereduced numerical effort for the optimization process and the
invariance with respect to the transformation group.
Since there are many techniques (e. g. computer tomogra-
phy) which deliver three-dimensional data as output it is also
of interest to develop fitting procedures for three-dimensional
objects.
In this paper we present a procedure for fitting rectangular
boxes (and handling the corresponding degenerate cases) which
are described by a set of voxels in a voxel space representing
the object as a solid and not only forming its boundary.
This research was supported by DAKO GmbH, Jena.
I I. FITTING USING NORMALIZATION
At first we give a short summary of the general principle of ourfitting method.
We have a class T of transformations where each t ∈ T is
described by n parameters ξ1, . . . , ξn. We have also a class of
primitives P (θ), these are the theoretical shapes used for fitting
(e.g. rectangles, circles, cubes etc.). Each primitive is described
by m parameters θ1, . . . , θm. If we are given an object O, we
derive a tuple of features f (O) = (f 1, f 2, f 3, . . . ). At this point
some fitting methods try to solve the problem
||f (O) − f (P (θ))||2 −→ min (1)
by searching the m-dimensional space Θ of all primitives.
In our approach, we choose an appropriate canonical frame
for the class of primitives we fit (e.g. a unit square for the
class of all squares with respect to the similarity transforma-
tion group) and normalize the object to that frame. Suppose
we also normalize the optimal primitive P (θ∗) with the same
transformation, we have to solve the optimization problem
||f (O) − f (P (θ∗))||2 −→ min (2)
It has the effective dimension m − n. Examples with effective
dimension 0 can be found in [4], whereas in [5] examples with
dimension 1 are given.
At the end we get the optimal fitting primitive P (θ∗) by ap-
plying the inverse of the normalization transformation to the so-
lution of the optimization process.
III . FITTING RECTANGULAR BOXES
In this paper we use as transformations the group of similarity
transformations. A similarity transformation in three dimen-
sions can be described by seven parameters (three for the trans-
lational part, three for the rotational part and one for the isotrope
scaling). Rectangular boxes can be described by nine parame-
ters (six for the motion and three for the side lengths). As a
canonical frame we choose a centered, axis-parallel rectangular
box with volume 1, which can be described by two parameters
for two of its side lengths. So here we have an example wherethe optimization problem has effective dimension 2.
0-7803-9134-9/05/$20.00 ©2005 IEEE

8/6/2019 A New Efficient Algorithm for Fitting Rectangular
http://slidepdf.com/reader/full/a-new-efficient-algorithm-for-fitting-rectangular 2/4
As features we use here the volume moments
m pqr =
object
x pyqzrdxdydz
up to fourth order ( p + q + r = 4).
The normalization process is done in the following steps:
A. Translation
As a first step, we normalize the translation T and get
(tx, ty, tz) =
−
m100
m000
,−m010
m000
,−m001
m000
.
From now on we use the central moments m
pqr = µ pqr and we
have m100 = m
010 = m001 = 0.
B. Rotation
For the normalization of the rotation we rotate the object so
that the axes of its inertial ellipsoid coincide with the coordi-
nate axes. The inertial ellipsoid axes are the eigenvectors of the
inertial matrix
I =
m
200 m
110 m
101
m
110 m
020 m
011
m
101 m
011 m
002
.
It is real and symmectric and has three real eigenvalues and
three eigenvectors which are pairwise perpendicular. Here an
ambiguity is introduced, since u and −u are both eigenvectors
there are eight possible rotations. In [2] an heuristic method is
given to select one of this eight tiltings. This is of evidence if
for example the normalized objects shall be compared through
some features, but since we deal only with rectangular boxes
this is uncritical for us. So we choose simply one of the eight
possibilities.
If we describe the rotation by
R = R11 R12 R13
R21 R22 R23
R31 R32 R33
(here det(R) = 1 holds), using
(x + y + z)n =
0≤a,b,c≤na+b+c=n
(a + b + c)!
a! b! c!xaybzc
=
0≤a,b,c≤na+b+c=n
a + b + c
b + c
b + c
c
xaybzc
(see [3]) the moments have to be transformed in the followingway:
m
pqr =
0≤a,b,c≤pa+b+c=p 0≤d,e,f≤q
d+e+f=q 0≤h,i,k≤rh+i+k=r
a + b + c
b + c
· . . .
b + c
c
d + e + f
e + f
e + f
f
h + i + k
i + k
· . . .
i + k
k
· Ra
11Rb12Rc
13Rd21Re
22Rf 23Rh
31Ri32Rk
33 · . . .
m
a+d+h,b+e+i,c+f +k.
After that, we have m
110 = m
101 = m
011 = 0.
C. Scaling
Now we normalize the size by an isotrope scaling S so that
m
000 = 1. The scaling factor α is
α = 3
1
m
000
.
The moments are transformed by the relationship
m
pqr = α p+q+r+3m
pqr .
D. Canonical frame parameters
To determine the two remaining parameters, we use some
higher order moments which have nontrivial values. Suppose
we have a centered axis-parallel rectangular box with side lengthsa, b and c and volume 1 (abc = 1). Then the following moments
can be expressed in terms of a and b (all moments of third order
vanish):
µq200=
a2
12µq400=
a4
80µq220 =
a2b2
144
µq020=
b2
12µq040=
b4
80µq202 =
1
144b2
µq002=
1
12a2b2µq004=
1
80a4b4µq022 =
1
144a2
To determine a and b we have to solve the following opti-
mization problem:
f (a, b) = (m
200 − µq200)2 + (m
020 − µq020)2+
(m
002 − µq002)2 + (m
400 − µq400)2+
(m
040 − µq040)2 + (m
004 − µq004)2+
(m
220 − µq220)2 + (m
202 − µq202)2+
(m
022 − µq022)2
−→ min
subject to 0 < a, b < ∞.

8/6/2019 A New Efficient Algorithm for Fitting Rectangular
http://slidepdf.com/reader/full/a-new-efficient-algorithm-for-fitting-rectangular 3/4
If we have a solution we can easily calculate the corners of
the fitted canonical frame and apply the inverse transform (S ·R ·T )−1 = T −1 ·R−1 ·S −1 to get the optimal fitted rectangular
box for our object.
But as for rectangles, there are also cases were the abovegiven normalization of the rotation fails. The inertial ellipsoid
can degenerate to a sphere or to an ellipsoid with two axes of
equal length. In both cases additional procedures are necessary,
which are described in the following.
IV. HANDLING SPECIAL CASES
A. Inertial ellipsoid becomes a sphere
One possible degeneration of the inertial ellipsoid is the sphere.
In this case, we use fourth order moments for a proper nor-
malization of the rotation. To find the right rotation parame-
ters we use the fact that for a cube centered about the originthe term µ400 + µ040 + µ004 reaches its minimum if the cube
is positioned axis-parallel (this is the position of our canoni-
cal frame). In Fig. 1 the minima of this term are shown de-
pendent on the three rotation angles rx, ry , rz used to rotate
the axis-parallel cube about the axes with Rz · Ry · Rx: These
are the grid points {(π2
i, π2
j, π2
k) : i,j,k ∈ Z} and the two
sets of lines {ry = π2
i, rz = −rx + π2
j : i, j ∈ Z} and
{ry = π2
i, rz = rx + π2
j : i, j ∈ Z}. So we perform an
optimization
µ400(rx, ry, rz) + µ040(rx, ry, rz) + µ004(rx, ry , rz)
−→ min
to get the proper rotation parameters for R = Rz · Ry · Rx.
rxry
rz
Fig. 1. The minima of µ400(rx, ry, rz) + µ040(rx, ry, rz) + µ004(rx, ry , rz) (rx, ry , rz run
from 0 to 1).
B. Inertial ellipsoid has rotational symmetry
In the second case where two axes of the inertial ellipsoid are
of equal length and the third is different from them we take the
direction of this different axis and map it to the x-axis as a first
normalization step. The normalization is completed by finding
a proper rotation about this x-axis. Here we also use the fourth
order moments and perform the optimization
µ040(rx) + µ004(rx) −→ min
to compute the remaining rotation parameter.
V. A DECISION CRITERION
To complete our fitting algorithm we need a criterion when touse which of the above described methods. Let λ1, λ2, and λ3be the eigenvalues of the inertia matrix with λ1 ≥ λ2 ≥ λ3and consider their ratios r1 = |λ2
λ1| and r2 = |λ3
λ2|. These ratios
are invariant to similarity transformations and can be used to
distinguish between the three cases for rotation normalization:
• If both ratios are nearby 1, then the object seems to be
a cube and we should use the fitting using fourth order
moments only.
• If one ratio is nearby 1 and the other is clearly different
from 1 we should take one direction from the inertia ma-
trix and use fourth order moments to get the two others asdescribed in case 2 above.
• In all other cases we use the inertia matrix.
Fig. 2 shows the fitting quality for each of the three rotation
normalization methods. It is computed in the following way:
We randomly create boxes of volume 503 inside a 200x200x200
voxel space, set all the voxels inside the box and then fit a box
using our algorithm with each of the three rotation normaliza-
tion methods to determine the regions where they are applica-
ble. The fitting quality q shown in the figure is the arithmetic
means of the distances between the corners of the original and
the fitted box (q = 1 means 1 voxel).
Fig. 2. Evaluation of the fitting quality q dependent on the ratios r1 and r2 forthe three methods for rotation normalization. Upper images: 0 ≤ q <= 1
(method works well), lower images: 1 < q (method should not be used in thisrange). From left to right: Using the inertia matrix, using fourth order
moments only, taking one direction from the inertia matrix and normalizing theother two by fourth order moments. In the diagrams we have r1 on the x-axis
and r2 on the y-axis, both ranging from 0 to 1.
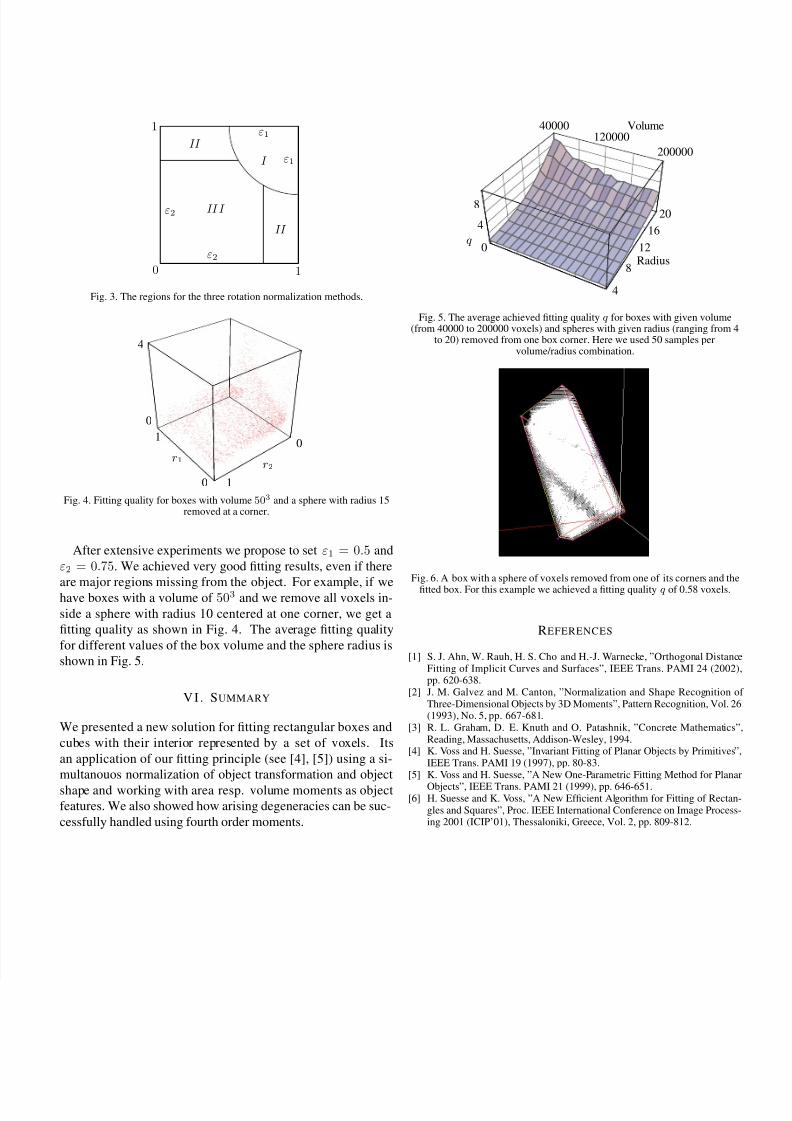
So with two properly chosen values ε1 and ε2 the decision is
made as shown in Fig. 3. First we check if the ratios lie in region
I and if so, we use only the fourth order moments. Otherwise
we check if the ratios lie in the regions marked with II and if
so, we use one direction from the inertia matrix and the fourth
order moments for the remaining directions. In all other caseswe use only the inertia matrix for rotation normalization.
8/6/2019 A New Efficient Algorithm for Fitting Rectangular
http://slidepdf.com/reader/full/a-new-efficient-algorithm-for-fitting-rectangular 4/4
ε1
ε1
ε2
ε2
0 1
1
I
II
II
II I
Fig. 3. The regions for the three rotation normalization methods.
r1r2
4
0
0
10
1
Fig. 4. Fitting quality for boxes with volume 503 and a sphere with radius 15removed at a corner.
After extensive experiments we propose to set ε1 = 0.5 and
ε2 = 0.75. We achieved very good fitting results, even if there
are major regions missing from the object. For example, if we
have boxes with a volume of 503 and we remove all voxels in-
side a sphere with radius 10 centered at one corner, we get a
fitting quality as shown in Fig. 4. The average fitting quality
for different values of the box volume and the sphere radius is
shown in Fig. 5.
V I . SUMMARY
We presented a new solution for fitting rectangular boxes and
cubes with their interior represented by a set of voxels. Its
an application of our fitting principle (see [4], [5]) using a si-
multanouos normalization of object transformation and object
shape and working with area resp. volume moments as object
features. We also showed how arising degeneracies can be suc-
cessfully handled using fourth order moments.
8
4
0
40000120000
200000
Volume
20
16
12
8
4
Radius
q
Fig. 5. The average achieved fitting quality q for boxes with given volume(from 40000 to 200000 voxels) and spheres with given radius (ranging from 4
to 20) removed from one box corner. Here we used 50 samples pervolume/radius combination.
Fig. 6. A box with a sphere of voxels removed from one of its corners and the
fitted box. For this example we achieved a fitting quality q of 0.58 voxels.
REFERENCES
[1] S. J. Ahn, W. Rauh, H. S. Cho and H.-J. Warnecke, ”Orthogonal DistanceFitting of Implicit Curves and Surfaces”, IEEE Trans. PAMI 24 (2002),pp. 620-638.
[2] J. M. Galvez and M. Canton, ”Normalization and Shape Recognition of Three-Dimensional Objects by 3D Moments”, Pattern Recognition, Vol. 26(1993), No. 5, pp. 667-681.
[3] R. L. Graham, D. E. Knuth and O. Patashnik, ”Concrete Mathematics”,Reading, Massachusetts, Addison-Wesley, 1994.
[4] K. Voss and H. Suesse, ”Invariant Fitting of Planar Objects by Primitives”,IEEE Trans. PAMI 19 (1997), pp. 80-83.
[5] K. Voss and H. Suesse, ”A New One-Parametric Fitting Method for Planar
Objects”, IEEE Trans. PAMI 21 (1999), pp. 646-651.[6] H. Suesse and K. Voss, ”A New Efficient Algorithm for Fitting of Rectan-
gles and Squares”, Proc. IEEE International Conference on Image Process-ing 2001 (ICIP’01), Thessaloniki, Greece, Vol. 2, pp. 809-812.