Embed Size (px)
Citation preview

A Modelica Library for Spacecraft Thermal Analysis
Tobias Posielek1
1Institute of System Dynamics and Control, DLR German Aerospace Center, Oberpfaffenhofen, [email protected]
AbstractIn spacecraft missions it is vital to maintain all space-craft components within their required temperaturelimits. Thus, a model incorporating all main heatfluxes acting on the spacecraft is necessary to allowfor the design of a thermal control subsystem. Thispaper introduces the thermal space systems librarywhich implements common models of radiation andthermal components of a spacecraft. Special effort isput into the calculations of the angles describing theorientation of the spacecraft with respect to sun andearth. Issues occurring due to the recalculation of theangles in each time step are shown and methods fortheir determinations are given.Keywords: space modeling, thermal modeling, angledetermination
1 IntroductionIn spacecraft engineering, it is essential to ensurethat all components operate in their appropriate tem-perature range to avoid malfunction and equipmentbreakage. Therefore, an analysis of the thermal dy-namics is a necessity to design the required thermalcontrol (Gilmore and Bello 1994), (Meseguer, Pérez-Grande, and Sanz-Andrés 2012), (Fortescue, Swinerd,and Stark 2011). A rigorous description of the ther-mal system is difficult as it has to incorporate theorbit and the orientation of the spacecraft during themission, as well as the sun’s position and the dissi-pated energy within the spacecraft. The modellingof the thermal system is a present topic of interest(Ruan, Hu, and Sun 2017) (Lefeng et al. 2017) (Qianet al. 2015). Approaches of various complexity ex-ist to design the thermal control. Simple design ap-proaches consider only static worst case scenarios toaccount for degradation and orbit thermal dynamics(Larson and Wertz 1991). Other methods use ana-lytical models to obtain the dynamic evolution of thetemperature over the course of multiple orbits (Tsai2004).
The proposed library allows the simulation of thecomplete spacecraft system including the thermal sys-tem as well as the electric and mechanical systemproviding the dissipated energy and spacecraft ori-entation dependent on the spacecraft mission. Thelibrary is proposed in view of simple analytical mod-
els. Generally, a spacecraft is modelled by a hugenumber of nodes with different heat fluxes acting oneach. We will only model the most important nodese.g. each surface may be modelled as a node for acuboid spacecraft. For each of these nodes the tem-perature dynamic is determined by the dynamic ofits adjacent nodes and the four main heat flows dueto the environment. One main point which will beilluminated is the calculation of the angle betweenthe spacecraft surfaces and its surroundings. As theattitude of spacecraft is usually not known a prioriand determined online, suitable methods to calculatethis angle are proposed. The library is created inview of earth orbiting spacecraft. However, the li-brary can also be used for simulations of spacecraftleaving earth orbit as long as modifications regardingthe coordinate systems and approximations, such asshadow calculations, are made. The proposed libraryuses the other Modelica-based libraries of the Insti-tute of System Dynamics and Control at the DLRGerman Aerospace Center such as the Environmentlibrary (Briese, Klöckner, and M. Reiner 2017) andSpaceSystems library (M. J. Reiner and Bals 2014).The library is created as an in-house library as a partof the design of an energy management for spacecraft.Section 2 introduces the essential fundamentals forthe thermal dynamics. Section 3 gives details to theModelica implementation and in Section 4 an exam-ple scenario is simulated to show the functionality ofthis library.
2 FundamentalsThis section introduces the coordinate systems, heatfluxes, solar angles, form factor and shadow functionnecessary to simulate the spacecraft thermal system.
2.1 Coordinate SystemsThe Earth-Centered Inertial (ECI) Frame is definedsuch that the xI-axis points in direction of vernalequinox, this is the intersection between the equa-tor and the sun’s apparent orbit during spring. ThezI-axis is parallel to the mean Earth’s rotation axisand towards the North Pole and the yI-axis completesright handed coordinate system. For all following ref-erence frames the rotation matrix to ECI coordinatesis given by their coordinate axes. Each coordinatesystem will be denoted with a superscript which will
PROCEEDINGS OF THE 1ST AMERICAN MODELICA CONFERENCE DOI OCTOBER 9-10, 2018, CAMBRIDGE, MASSACHUSETTS, USA 10.3384/ECP1815445
46

s
rξ
nφ
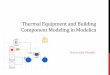
(a) Main angles influencing the temperature evolutionin a spacecraft. The solar zenith angle ξ is definedas the angle between the vector to the spacecraft rand the vector pointing to the sun s. The normalsolar angle φ describes the angle between the normalof a spacecraft surface n and the vector pointing fromspacecraft to the sun. The dotted line describes thespacecraft orbit.
(s xO )x
O +(s zO )z
Oθβ
ξ
s
r
(b) Angles describing the influence of the solar zenithangle ξ. The solar noon angle θ describes the anglebetween the vector pointing to the spacecraft r andthe solar noon, i.e. the vector pointing to the sunprojected on the orbit plane (xOs)xO +(zOs)zO. Thebeta angle β is defined as the angle between the orbitplane and the vector pointing to the sun s.
Figure 1. Solar Angles
be used for the notation of their coordinate axes androtation matrices. We denote T S,I =
[xS yS zS]
as the transformation from ECI coordinates to an ar-bitrary coordinate system with superscript S. So forrI in ECI coordinates the transformed vector rS iscalculated via
rS = T S,IrI . (1)The orbit frame is defined for a spacecraft in an el-
liptical orbit with position rI(t) and velocity vI(t) ininertial coordinates by the yO-axis which is normal tothe orbit plane in direction of negative angular mo-mentum, the zO-axis which points to geocentric nadirand the xO-axis which completes the right handed co-ordinate system and is for circular orbits in directionof velocity. We omit the time argument on the righthand side and obtain the transformation from ECIcoordinates to orbit coordinates as
T O,I(t) =[
rI×(rI×vI)‖rI×(rI×vI)‖ − rI×vI
‖rI×vI‖ − rI(t)‖rI(t)‖
]. (2)
2.2 Environmental Heat FluxesMainly four environmental heat fluxes are actingon a spacecraft surface, namely the heat flux dueto direct solar irradiation, the solar radiation re-flected by the earth, the radiation of the earth emit-ted in the infra-red spectrum and the radiation ofthe spacecraft emitted to deep space (Larson andWertz 1991),(Meseguer, Pérez-Grande, and Sanz-Andrés 2012). Each of these fluxes and its calculationis introduced in this section.
2.2.1 Direct SolarThe solar radiation is the main factor influencing tem-perature changes of the spacecraft. A solar constantGs0 is defined as in (Meseguer, Pérez-Grande, andSanz-Andrés 2012) which gives the mean solar irradi-ance acting on a unit area perpendicular to the solarrays in a distance of 1ua where ua denotes the astro-nomical unit. As the amount of irradiance crossingspherical surfaces with different radii is assumed tobe constant, the solar irradiation Gs scales with dis-tance as
Gs(d) = Gs0d0d
2
where d is the distance in astronomical units andd0 = 1ua. The solar energy is mostly distributedin visual and short wavelength infra-red (Larson andWertz 1991). This allows for surfaces which are veryreflective in the solar spectrum but highly emissiveto long wavelength infra-red. A simple analyticalmodel incorporates the angle φ = φ(n,r,s) ∈ [0,π]between the surface normal and the sun and theshadow of the earth described by the shadow coef-ficient ν = ν(r,s) ∈ [0,1] introduced in Section 2.5.Then the acting solar flux reads
Qsun =
αGs
(‖s−r‖1ua
)Acos
(φ
)ν if 0 < φ < π
20 if π
2 < φ < π(3)
where α denotes the solar absorptance of the surfaceand A the area of the surface.
DOI PROCEEDINGS OF THE 1ST AMERICAN MODELICA CONFERENCE 10.3384/ECP1815445 OCTOBER 9-10, 2018, CAMBRIDGE, MASSACHUSETTS, USA
47

2.2.2 AlbedoBy albedo we denote the part of the solar radiationwhich is reflected by the earth or scattered by theplanet surface and atmosphere. Combining the simplemodels from (Larson and Wertz 1991) and (Meseguer,Pérez-Grande, and Sanz-Andrés 2012) we obtain
Qalb =
ρalbαGs(d)AFform cos(ξ)
if 0 < ξ < π2
0 if π2 < ξ < π
(4)
where ρalbedo ∈ [0,1] is the albedo coefficient. Thiscoefficient can vary over the course of an orbit anddepends on the orbits inclination. This model incor-porates the solar zenith angle ξ(s,r) ∈ [0,π], the anglebetween the sun and the spacecraft, and a form factorFform(r,n) defined in Section 2.4 to describe the partof the radiation that actually strikes the spacecraftsurface.2.2.3 Planetary RadiationAs planetary radiation we denote the thermal radia-tion which is emitted by the planet as long wavelengthinfra-red radiation. The emitted radiation can be cal-culated as the absorbed solar radiation of the planetminus the radiation emitted via albedo. Then, by as-suming the planet to be a black body we obtain theplanetary infra-red thermal heat acting on a sufraceof a spacecraft as in (Meseguer, Pérez-Grande, andSanz-Andrés 2012)
Qplanet(r,n) = εAFform(r,n)σT 4p (5)
where Tp denotes the black body temperature of theearth, σ the Stefan-Boltzmann constant and ε theinfra-red emissivity of the surface. Instead of usingthe black body temperature of the earth (5), it isoften written as
Qplanet(r,n) = εAFform(r,n)IIR (6)
where IIR is the intensity of earth infra-red flux toaccount for the variation of Qplanet. Note that IIRis actually not a constant but also varying over thecourse of an orbit. However, the variation of IIR issmall in comparison to the albedo variation.2.2.4 Radiation to Deep SpaceThe outer surfaces of a spacecraft are radiatively cou-pled to space. The energy of the reradiation to spaceis usually in the long wave infra-red spectrum and canbe described by
Qds = εAσT 4 (7)
where T denotes the temperature of the surface.These four heat fluxes are the main environmen-
tal heat fluxes acting on the spacecraft. Other fluxesdues to the environment exist but are neglected in the
analysis due to their minor influence on most space-craft. Numerical values for the parameters describingthe solar absorptivity and infra-red emissivity of dif-ferent surface can be found in the literature such as(Larson and Wertz 1991). Hot and cold case scenarioparameters for ρalb, IIR and Gs dependent on the or-bit and can be found in (Larson and Wertz 1991).Formula to describe the solar angles φ, ζ, the formfactor Fform and the shadow coefficient ν are intro-duced in the following sections.
2.3 Thermal AnglesFor the calculation of solar, albedo and infra-red ir-radiation, different angles describing the position ofthe sun and the attitude of the surface are of inter-est. These angles are visualized in Figure 1. Figure1a shows the zenith angle ξ and normal solar angle φwhich are the angles influencing the generation of heatand Figure 1b the solar noon angle θ and beta angleβ which can describe the influence of the solar zenithangle as will be explained later. In this section, wedefine these angles, show the relations between themand introduce two different ways to calculate theseangles.
Problem FormulationUsually two vectors v1 and v2 are given in a referencecoordinate system. In order to calculate the anglebetween these two vectors, it may seem advantageousto use the scalar product as in formula (8) as youdo not need any other rotations or coordinates sys-tem and use only the property of the scalar product.This however, gives only angles between [0,π] whichis sufficient for many calculations which use unevenfunctions but it leads to undesired results when ro-tations are considered as illustrated in Figure 3. Inthis figure the angle between the vectors v1 and v2(t)is displayed on the left hand side over the course ofa full uniform planar rotation illustrated in the mid-dle. The angle moves between 0 and π which makesno unique identification of the position of v2 fromthe angle possible. Note that in the control context,the uniqueness issue can be solved by using quater-nions which use the normal axes of the rotation asadditional information. On the right hand side, thedesired angle evolution is displayed which ensures thebijection between position and angle in a single rota-tion. In order to achieve this angle definition between(−π,π], we use the properties of cylinder coordinates.Such a definition is simple if a coordinate system isconstructed which x − y-plane describes the rotationplane or if the reference frame can be rotated on therotation plane. Note however, that only a minimumof information about the rotation is known and onecan only rely on the current value v1(t) and v2(t) butnot on a closed description of the functions v1(·) andv2(·). This information has to be used to construct
PROCEEDINGS OF THE 1ST AMERICAN MODELICA CONFERENCE DOI OCTOBER 9-10, 2018, CAMBRIDGE, MASSACHUSETTS, USA 10.3384/ECP1815445
48

v1
v1 +v2
v1 −v2
x
y
(a) Angle definition using(8)
v1
v1 +v2
x
y
v1 −v2
(b) Angle definition usingcoordinate system (9)
Figure 2. Different angle definitions
the same coordinate system at every time step overthe course of the rotation. Problems using intuitivecoordinate systems definitions are illustrated in Fig-ure 5 and 4. Thus, an additional vector is necessaryto construct this coordinate system. In the case of or-bit rotations this vector comes by the cross productof velocity and position.
Angle Definitions
The most intuitive definition defines the angle θ ∈[0,π] as the smaller positive angle between the twovectors v1,v2 ∈ R3 as
θ = ∠(v1,v2) := cos-1(
v1 v2
‖v1‖‖v2‖
)(8)
where cos-1 denotes the inverse of the cosine with adomain of [0,π]. This definition is sufficient for mostpurposes especially if only the cosine of an angle is ofinterest. However, as a result the angle between v1and αv1 + v2 is the same as between v1 and αv1 − v2with v
1 v2 = 0 and α ∈ R which is undesirable in viewof planar rotations as illustrated in Figure 2a. Thisflaw can be overcome by using a cartesian coordinatesystem and its polar coordinate representation.
For cartesian coordinate system with axes x,yand z represented by its transformation matrix T =[x y z
]so that Tv1 and Tv2 are in the x-y-plane,
we define the angle θ ∈ (−π,π] by
θ = ∠x(v1,v2) := atan2(e2Tv2,e1Tv2)−atan2(e2Tv1,e1Tv1) .
(9)
where ei denotes the i-th unit vector in R3 and atan2
the extension of the atan function as
atan2(b,a) :=
atan(
ba
)if a > 0
atan(
ba
)+π if a < 0 ∧ b ≥ 0
atan(
ba
)−π if a < 0 ∧ b < 0
π2 if a = 0 ∧ b > 0−π
2 if a = 0 ∧ b < 0undefined if a = 0 ∧ b = 0
.
We use the superscript x in ∠x to reference to thecorresponding x − y − z-coordinate system which de-scribes T . This definition gives for planar rotationsangles the results as desired and is illustrated in Fig-ure 2b. The angle between between v1 and v1 + v2and v1 and v1 −v2 have different signs in comparisonto Figure 2a.
With this definition we can describe the angles forplanar rotations by using an at the beginning estab-lished coordinate system with the mentioned prop-erties. However, as the desired reference coordinatesystems for the calculations of the angles are subjectto slow changes, it is necessary to redefine the coor-dinate system at every point of time. This means thecoordinate axes have to be constantly recalculated.Clearly, it is desirable to obtain continuous axes thatdo not experience a change of sign. Furthermore, thecoordinate system shall be right handed and use onlyinformation about the current point of time.
By the definition of the cross product, it is suffi-cient to use only two vectors v1 and v2 to define acoordinate system via
x = v1‖v1‖ , (10a)
y = z ×x, (10b)
z = v1 ×v2‖v1 ×v2‖ . (10c)
However, for a constant v1 but a rotating v2 they- and z-axis change their direction when v1 and v2become parallel as can be seen in Figure 4.
Consider the Gram Schmidt process as a way toconstruct the coordinate system with
x = v1‖v1‖ , (11a)
y = v2 − (xv2)x‖v2 − (xv2)x‖ , (11b)
z = v3 − (xv3)x− (yv3)y‖v3 − (xv3)x− (yv3)y‖ . (11c)
However, with this definition it cannot be guaranteedthat the resulting coordinate system is right handedas illustrated in Figure 5.
We combine these two methods in order to obtaina continuous right handed coordinate system.
DOI PROCEEDINGS OF THE 1ST AMERICAN MODELICA CONFERENCE 10.3384/ECP1815445 OCTOBER 9-10, 2018, CAMBRIDGE, MASSACHUSETTS, USA
49

v1
v2(t2)π
π
π
π v2(t4) v2(t3)
v2(t1)
θ(t2)
θ(t1)
θ(t4)
θ(t3)v2(0)t1 t2 t3 t4 t1 t2
t3
t4
0 0
Scalar product angle definition Planar angle definitionPlanar rotation
Figure 3. Angle of a planar rotation described by two different definitions
y
x
z
v1
v2
y
x
z
v1v2
Figure 4. Defined coordinate system using (10)
y
x
z
v1
v2
v3
y
x
z
v1v2
v3
Figure 5. Defined coordinate system using (11)
Let xGram,yGram,zGram be the coordinate axes asin (11). Then define for the coordinate system T =[x y z
]as
x = xGram , (12a)y = z ×x, (12b)z = zGram . (12c)
Thus (9) gives with (11) and (12) a method to cal-culate the continuous angle between v1 and v2 usingan additional vector v3. This method is introduced in
view of continuous rotations of v1 and v2 in a slowlychanging v1-v2-plane. However, it must be ensuredthat the plane normal does not get perpendicular tov3.2.3.1 The Solar Noon AngleThe solar noon angle θ is the angle between the space-craft vector r and the sun pointing vector s projectedon the orbit plane
θ = ∠xSN(r,(xOs)xO +(zOs)zO)
, (13)
using (9) and xSN,ySN,zSN denoting the coordinatesystem obtained with Equation (11) and (12) with thevectors v1 = (xOs)xO +(zOs)zO, v2 = r and v3 = −yO.This definition gives for a single orbit of a spacecraftan angle between (−π,π] with one discontinuity atmost.2.3.2 The Beta AngleThe beta angle β ∈ [−π
2 , π2 ] defined as in (Meseguer,
Pérez-Grande, and Sanz-Andrés 2012) describes therelative orientation of the orbit with regard to thesun, and is defined as the minimum angle betweenthe orbit plane and the solar vector. The beta an-gle is defined as positive if the spacecraft orbits in acounter clockwise direction and negative if it revolvesclockwise with respect to the sun as
β =
∠(s,(xos)xo +(zos)zo
)if syo < 0
−∠(s,(xos)xo +(zos)zo
)if syo ≥ 0
(14)
using the definition of the orbit frame from Section2.1 and Equation (8) . Another way to calculate thebeta angle is to use the normal of the orbit plane andparameterise the vectors by the orbital elements de-scribing the movement of the sun and the satellite.Consider the sun as a satellite of the earth with the
PROCEEDINGS OF THE 1ST AMERICAN MODELICA CONFERENCE DOI OCTOBER 9-10, 2018, CAMBRIDGE, MASSACHUSETTS, USA 10.3384/ECP1815445
50

inclination is and the sum of the argument of periap-sis and true anomaly ωs +νs, i.e. the opliquity of theecliptic and the true solar longitude of the ecliptic.Then the vector to the sun s and the vector orthogo-nal to the plane yO can be written in ECI coordinatesas:
s = cos(ωs +νs)xI +sin(ωs +νs)cos(is)yI
+sin(ωs +νs)sin(is)zI ,
yo = sin(Ω)sin(i)xI − cos(Ω)sin(i)yI +cos(i)zI .
Instead of calculating the angle to the projection wecalculate the angle to the orbit normal as
sin(β) = −cos(β + π
2 ) = −syo
⇒ β = sin-1 (cos(ωs +νs)sin(Ω)sin(i)− sin(ωs +νs)cos(is)cos(Ω)sin(i)+sin(ωs +νs)sin(is)cos(i)
).
(15)
This description emphasises the dependence of the βangle from the orbit inclination and longitude of theascending node.2.3.3 The Solar Zenith AngleThe solar zenith angle is defined as in (Meseguer,Pérez-Grande, and Sanz-Andrés 2012) to describe theportion of the illuminated planet which is seen by thespacecraft. The solar zenith angle ξ is defined as theangle between the spacecraft vector r and the sunpointing vector s as
ξ = ∠(r,s) (16)
using (8). In order to enable a thermal analysis de-pendent of the orbit attitude, the influence of this an-gle can be described by the slowly time varying betaangle β and the periodic solar noon angle θ.
For the solar zenith angle ξ, the beta angle β andthe solar noon angle θ holds
cosξ = cosβ cosθ . (17)
As can be seen in Equation (4) the solar zenith an-gle influences the acting heat significantly. By using(17) we have introduced two different angles which al-low analysing the impact of the chosen satellite orbit.The satellite orbit can be described by the six orbitalelements a, ε, i, Ω, ω and M0. If the orbiting object isonly influenced by a gravitation field described by aspherical symmetric planet these orbital elements areconstant. In many applications, orbits are chosen tobe circular sun synchronous orbits. Thus, a uniformmovement is obtained and the solar noon angle can bedescribed as θ = ωot, where ωo is the angular rotationrate dependent on the semimajor axis a. However,the beta angle is determined by the inclination of the
orbit i and the of the longitude of the ascending nodeΩ as can be seen in (15). Therefore, the choice of Ωinfluences the heat acting on the satellite due to thesun significantly.2.3.4 The Normal Solar AngleThe normal solar angle φ is defined between the nor-mal of a spacecraft surface n and the vector pointingto the sun s− r as
φ = ∠(s− r,n
)≈ ∠
(s,n
). (18)
This approximation holds because the distance be-tween earth origin and spacecraft is negligible com-pared to the distance between sun and spacecraft inlow earth orbits.
2.4 Form FactorFor the form factor described in the previous sectionit is sufficient to assume the spacecraft surface to bea infinitesimally small plate and the earth to be asphere. Then we can use the results from (Juul 1979)and obtain the form factor as a function of distanceto the plate and angle ζ = ∠(r,n), the angle betweenthe normal of the plate n and vector between earthand plate which is approximately the vector betweenearth and spacecraft r. Let H = ‖r‖
r⊕where r ∈ R3 is
the spacecraft position and r⊕ the radius of the earth,then the form factor is
Fform =
cos(ζ)H2 ζ < π
2 − sin-1 ( 1H
)
Fform,2π2 − sin-1 ( 1
H
)< ζ < π
2 +sin-1 ( 1H
)
0 ζ > π2 +sin-1 ( 1
H
)(19)
with
Fform,2 = 12 − 1
πsin-1
(√H2 −1
H sin(ζ)
)
+ 1πH2
(cos(ζ)cos-1 (
−√
H2 −1cot(ζ))
−√
H2 −1√
1−H2 cos(ζ)2)
.
2.5 Shadow FunctionThe shadow function gives the occultation of thesatellite due to the earth. We use cylindrical shad-ows as illustrated in Figure 6. The distance betweenearth and sun is way higher than the difference oftheir radii and the distance between earth and space-craft, which is why it is sufficient to assume cylindricalshadows instead of conic ones. We construct an or-thonormal basis x,y,z ⊂ R3 with x = s
‖s‖ then theshadow coefficient ν = ν(r,s) is calculated as
ν =
1 if rx < 0∧‖ry + rz‖ < r⊕0 otherwise
. (20)
DOI PROCEEDINGS OF THE 1ST AMERICAN MODELICA CONFERENCE 10.3384/ECP1815445 OCTOBER 9-10, 2018, CAMBRIDGE, MASSACHUSETTS, USA
51

r
xsh ysh
zsh
β θ
Figure 6. Cylindrical Shadow Model
Note that instead of taking an arbitrary normal ba-sis we can define a coordinate system ·sh using thedefined solar noon and beta angle via
T sh,I =[xsh ysh zsh]
= Ry(−π2 )Rx(β)Ry(θ)Ry(π)T o,I ,
where
Rx(θ) =
cos(θ) sin(θ) 0−sin(θ) cos(θ) 0
0 0 1
and
Ry(θ) =
cos(θ) 0 sin(θ)0 1 0
−sin(θ) 0 cos(θ)
.
We can use this coordinate system to parameteriser as
r
‖r‖ = cos(θ)cos(β)xsh +cos(θ)sin(β)ysh − sin(θ)zsh .
Then Equation (20) reads
ν =
1 if |θ| > π2 ∧
√cos(θ)2 sin(β)2 +sin(θ)2 <
r⊕‖r‖
0 otherwise.
(21)
Other methods divide the earth’s shadow into um-bra and penumbra. The shadow coefficient ν ∈ (0,1)in penumbra is then determined by the overlapping oftwo circular disks. A detailed derivation can be foundin (Montenbruck and Gill 2011).
3 Modelica ImplementationThe implementation of the Thermal Space library isan extension of the DLR Space Systems library from(M. J. Reiner and Bals 2014) and uses gravity andsun models of the DLR Environment Library (Briese,Klöckner, and M. Reiner 2017). The implementedmodels are based on the Modelica Standard Library.
3.1 Heat Fluxes ImplementationEach of the solar radiation, albedo radiation, infra-red radiation and deep space radiation is imple-mented. We will discuss only the implementation ofthe Albedo radiation in detail as all other radiationsfollow the same implementation concept. The albedomodel is shown in Figure 7. The user may providethe material specific solar absorptance parameter αas well as the area of the surface A and the normal ofthe surface nB in body coordinates. Additionally, theaverage solar flux constant Gs0 and the albedo coeffi-cient ρalb may be provided. Standard values for theseparameters exist, however it is often desired to simu-late special hot and cold case scenarios which makesan adaption of these parameters as implemented a de-sirable feature. The model has two ports, a frame anda heat port connector. As the spacecraft is usuallymodelled as a rigid body using the Modelica Multi-Body Library (Otter, Elmqvist, and Mattsson 2003),the frame connector has to be connected to the bodymodelling the spacecraft. Like this the orientation ofthe frame can be accessed to provide the position rand orientation of the spacecraft T B. Additionally,the outer world model is used to obtain the positionof the sun s. Then Equations (8) and (16) are used todetermine the solar zenith angle ξ. The orientation ofthe spacecraft is used to transform the normal vectorin body coordinates nB into ECI coordinates n usingEquation (1). Then the position of the spacecraft rand the normal of the surface n are used to deter-mine the form factor with Equation (19). Finally thealbedo heat flow Qalb is calculated using (4) and fedto the heat port as can be seen in Figure 7. This heatport can then be connected to other sources and sinksof heat to model the thermal dynamics. Instead ofusing (16), Equation (17) can be used with (9), (12),(13) and (14) to describe the influence of the solarangle. This gives the same results but uses the betaangle β instead of the solar zenith angle ξ which maybe easier to parameterise with respect to the satellitesorbit as can be seen in (15). The other radiations have
PROCEEDINGS OF THE 1ST AMERICAN MODELICA CONFERENCE DOI OCTOBER 9-10, 2018, CAMBRIDGE, MASSACHUSETTS, USA 10.3384/ECP181544552

Figure 7. Albedo Model Diagram
Figure 8. Spacecraft Surface Model Diagram
the same structure but use the Equations (3), (5) and(7), respectively, with the angle defined in (18) andthe shadow function (20).
3.2 Thermal Space ComponentsThe thermal model of a spacecraft surface can be seenin Figure 8. The thermal dynamics are described bythe differential equation
CT = Qalb +Qsun +Qplanet −εAσT 4 +Qr (22)
where C is the thermal capacitance of the surface andQr describes all other heat fluxes which are acting onthe heat port. This includes foremostly the internalpower dissipation of the satellite. The capacitanceis implemented as a conditional component. Thismodel offers the opportunity to remove the thermalcapacitance if only the steady state calculations areof interest. Additionally, a desired temperature of thesurface may be given to obtain the necessary dissipa-tive power which have to be for example produced byheaters to maintain this temperature.
Since many small satellites have the form of acuboid, a model with six spacecraft surfaces with aninfinite resistance between them is implemented. Thiscan be used to simulate the heat evolution at eachspacecraft surface as in Section 4. In order to accountfor the different satellite modes, attitude specific sur-face configurations are implemented as for e.g. earthpointing mode in which the attitude of the satellite is
fixed. Satellite components are modelled as a thermalcapacitor which is connected to a spacecraft surface,usually a radiator. For each of these components theparameters already discussed may be provided to sim-ulate different scenarios of interest.
3.3 ArchitecturesThere are three thermal concepts commonly used formicro- and nano satellites as described in (Baturkin2005) - autonomous concept, centralized concept andcombined concept. Each of these structures is imple-mented modelling the thermal coupling between eachthermal component and the external heat exchange.
4 Example ScenarioIn order to show the functionality of the library, thethermal dynamics of a cuboid earth pointing space-craft are simulated. The cuboid is modelled by sixsurfaces having the properties of a radiator. The sur-faces have the same area A = 1m2 and thermal prop-erties α = 0.25 and ε = 0.88. The spacecraft is ina sun synchronous orbit with an altitude of 600kmand 10 : 30h longitude of the ascending node simu-lated 2018-02-10 at 10 : 00h. The earth’s gravitationfield is approximated up to the second zonal coeffi-cient (Markley and Crassidis 2014). No dissipativeheat is simulated and the parameter are chosen asGs = 1361Wm−2, ρalb = 0.3 and Tp = 255K. Onecomplete orbit, which takes about 5800s ≈ 97min, issimulated. The satellite is earth pointing over thewhole orbit, i.e. the spacecraft body axes which areperpendicular to the cuboid surfaces are aligned withthe orbit frame.
Figure 9 shows the visualisation of the describedscenario. The spacecraft itself is visualised as a sim-ple grey cuboid. The heat flows, the sum of solar,albedo and infra-red radiation, acting on each surfaceare visualised using head up displays from the Visu-alization library (Bellmann 2009). It can be seen thatall but the zenith direction are influenced by a con-stant heat flow due to the earth’s infra-red radiation.Furthermore, it can be seen that the spacecraft is inthe sunlight after approximately 1100s up to 4990sand that the transition between shadow and sunlitis discontinuous. The nadir direction is mainly in-fluenced by the infra-red and albedo irradiation as itsview to sun is mostly blocked by the earth. Due to thelow solar absorptance of the surface the change of theacting heat flow is comparatively small. The zenithdirection however is mostly influenced by the solarradiation. No albedo and infra-red radiation reachesthis surface. The surface perpendicular to the orbitplane and in sun direction is foremostly influenced bythe solar radiation as well. However, due to the smallchange of the angle between this surface and the di-rection to the sun, this heat flow is almost piecewiseconstant. On the contrary, the surface perpendicular
DOI PROCEEDINGS OF THE 1ST AMERICAN MODELICA CONFERENCE 10.3384/ECP1815445 OCTOBER 9-10, 2018, CAMBRIDGE, MASSACHUSETTS, USA
53

Figure 9. Heat flows acting on the surfaces of a cuboid earth pointing spacecraft
to the orbit plane and in anti sun direction is only in-fluenced by the infra-red and albedo radiation. Dueto the small solar absorptance, the albedo radiationinfluence is comparatively small and this surface hasthe smallest heat flow changes. The surfaces in veloc-ity and in anti velocity direction are mirrored with re-spect to the solar noon of the spacecraft. Albedo andinfra-red radiation are acting continuously on thesesurfaces while the influence of the solar radiation canbe seen in the sudden discontinuity of the heat flow.All in all, it can be observed that all surfaces aresubject to high heat flux changes especially when thespacecraft enters and exits the eclipse. The smallestvariation and overall incident heat flux acts on thesurface orthogonal to the orbit plane in anti sun di-rection making it suitable as a surface with radiator.
5 ConclusionsWe have presented a Modelica library suitable for thedevelopment of a thermal spacecraft model. The mainacting environmental and spacecraft heat flows are in-troduced and their dependence on different angles isgiven as in the literature. Issues regarding the de-termination of these angles have been described andnovel methods for their calculation are given and dis-cussed. An application example of the proposed li-brary is given to demonstrate the usefulness and flex-ibility of the Modelica implementation.
ReferencesBaturkin, Volodymyr (2005). “Micro-satellites ther-
mal control—concepts and components”. In: ActaAstronautica 56.1-2, pp. 161–170.
Bellmann, Tobias (2009). “Interactive simulationsand advanced visualization with modelica”. In:Proceedings of the 7th International Modelica Con-ference; Como; Italy; 20-22 September 2009. 043.Linköping University Electronic Press, pp. 541–550.
Briese, Lâle Evrim, Andreas Klöckner, and MatthiasReiner (2017). “The DLR Environment Libraryfor Multi-Disciplinary Aerospace Applications”. In:Proceedings of the 12th International ModelicaConference. 132, pp. 929–938.
Fortescue, Peter, Graham Swinerd, and John Stark(2011). Spacecraft systems engineering. John Wiley& Sons.
Gilmore, David G and Mel Bello (1994). Satellitethermal control handbook. Vol. 1. Aerospace Cor-poration Press EI Segundo, CA.
Juul, N. H. (1979). “Diffuse Radiation View Factorsfrom Differential Plane Sources to Spheres”. In:Journal of Heat Transfer 101.3, p. 558.
Larson, Wiley J. and James R. Wertz (1991). SpaceMission Analysis and Design. Springer.
Lefeng, Sun et al. (2017). “Modeling and Simulationon Environmental and Thermal Control System ofManned Spacecraft”. In: Proceedings of the 12thInternational Modelica Conference. 132. LinköpingUniversity Electronic Press, pp. 397–405.
Markley, F. Landis and John L. Crassidis (2014).Fundamentals of Spacecraft Attitude Determina-tion and Control. Springer.
Meseguer, J, I Pérez-Grande, and A Sanz-Andrés(2012). Spacecraft Thermal Control. WoodheadPublishing.
PROCEEDINGS OF THE 1ST AMERICAN MODELICA CONFERENCE DOI OCTOBER 9-10, 2018, CAMBRIDGE, MASSACHUSETTS, USA 10.3384/ECP1815445
54

Montenbruck, Oliver and Eberhard Gill (2011). Satel-lite Orbits: Models, Methods and Applications.Springer.
Otter, Martin, Hilding Elmqvist, and Sven ErikMattsson (2003). “The New Modelica MultibodyLibrary”. In: 3rd International Modelica Confer-ence, pp. 311–330.
Qian, Jing et al. (2015). “Projection-based reduced-order modeling for spacecraft thermal analysis”. In:Journal of Spacecraft and Rockets 52.3, pp. 978–989.
Reiner, Matthias J and Johann Bals (2014). “Nonlin-ear inverse models for the control of satellites withflexible structures”. In: Proceedings of the 10 th In-ternational Modelica Conference. 096, pp. 577–587.
Ruan, Hui, Xiaoguang Hu, and Dan Sun (2017). “Sim-ulation design and implementation of thermal con-trol subsystem for satellite simulator”. In: 12thIEEE Conference on Industrial Electronics and Ap-plications. IEEE, pp. 1260–1263.
Tsai, Jih-Run (2004). “Overview of satellite thermalanalytical model”. In: Journal of spacecraft androckets 41.1, pp. 120–125.
DOI PROCEEDINGS OF THE 1ST AMERICAN MODELICA CONFERENCE 10.3384/ECP1815445 OCTOBER 9-10, 2018, CAMBRIDGE, MASSACHUSETTS, USA
55