Embed Size (px)
Citation preview

This document contains a post-print version of the paper
A Magnetic Equivalent Circuit Based Modeling Framework for ElectricMotors Applied to a PMSM With Winding Short Circuit
authored by Gabriel Forstner, Andreas Kugi, and Wolfgang Kemmetmüller
and published in IEEE Transactions on Power Electronics.
The content of this post-print version is identical to the published paper but without the publisher's �nal layout orcopy editing. Please, scroll down for the article.
Cite this article as:
G. Forstner, A. Kugi, and W. Kemmetmüller, �A magnetic equivalent circuit based modeling framework for electricmotors applied to a pmsm with winding short circuit,� IEEE Transactions on Power Electronics, vol. 35, no. 11,pp. 12 285�12 295, 2019
BibTex entry:
@Article{acinpaper,
author = {Gabriel Forstner and Andreas Kugi and Wolfgang Kemmetm\"uller},
title = {A Magnetic Equivalent Circuit Based Modeling Framework for Electric Motors Applied to a PMSM With
Winding Short Circuit},
journal = {IEEE Transactions on Power Electronics},
year = {2019},
volume = {35},
number = {11},
pages = {12285-12295},
}
Link to original paper:
Read more ACIN papers or get this document:
http://www.acin.tuwien.ac.at/literature
Contact:
Automation and Control Institute (ACIN) Internet: www.acin.tuwien.ac.atTU Wien E-mail: [email protected]
Gusshausstrasse 27-29/E376 Phone: +43 1 58801 376011040 Vienna, Austria Fax: +43 1 58801 37699
Copyright notice:
© 2019 IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current orfuture media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, forresale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works.

IEEE POWER ELECTRONICS VOL. ??, NO. ?? 1
A Magnetic Equivalent Circuit Based ModelingFramework for Electric Motors Applied to a
PMSM With Winding Short CircuitGabriel Forstner, Student Member, IEEE, Andreas Kugi, Senior Member, IEEE, and
Wolfgang Kemmetmuller, Member, IEEE,
Abstract—Accurate and real-time capable mathematical mod-els are an essential prerequisite for the design of model-basedcontroller and estimation strategies for electric motors. Magneticequivalent circuit (MEC) models have proven to be an interestingalternative to classical inductor models that are typically utilizedfor the controller design. MEC models allow for a systematicinclusion of magnetic saturation and non-fundamental wavebehavior of motors, while still having a manageable modelcomplexity. The systematic derivation of the model equations canbe rather involved, if in addition to the magnetic circuit of themotor also the electric interconnection is taken into account. Forthis reason, a modeling framework for electric motors based onMEC models including the electric interconnection is proposed.It makes use of network theory, which allows to systemize andautomate major parts of the modeling task. The presented frame-work can be applied to a wide range of electromagnetic actuators.The feasibility of the proposed framework is demonstrated bythe application to the modeling of a PMSM with (turn-to-turn)winding short circuit. A comparison with measurement resultsshows a high model accuracy of the resulting real-time capablemodel both for healthy and faulty conditions.
Index Terms—magnetic equivalent circuit (MEC), model cali-bration, permanent magnet synchronous motor (PMSM), wind-ing short circuits.
I. INTRODUCTION
PERMANENT magnet synchronous motors (PMSMs) areused in various industrial applications due to their high
power density and efficiency. Their (optimal) control remains achallenge in particular when the PMSM is operated in rangeswhere nonlinear effects as magnetic saturation are relevant.Moreover, in many recent applications as, e.g., automotivesteering systems, a fault tolerant operation is demanded, see,e.g., [1], [2], [3]. A turn-to-turn winding short circuit of thestator coils is one of the most common faults in applicationswith PMSMs. Such faults commonly result in a nonlinear andasymmetrical behavior of the motor. Moreover, higher harmon-ics within the electromagnetic quantities of the machine canoccur and high currents may arise in the shorted coil. This canlead to local magnetic saturation of the machine, see, e.g., [4],
The authors gratefully appreciate the financial support provided by ROBERTBOSCH GMBH (CR/AEE). In particular, the authors would like to thankMaximilian Manderla for the helpful discussions.
The authors are with the Automation and Control Institute (ACIN),TU Wien, Vienna, Austria.e-mail: {forstner, kugi, kemmetmueller}@acin.tuwien.ac.at.
A. Kugi is also with the Center for Vision, Automation & Control, AustrianInstitute of Technology (AIT), Vienna, Austria.e-mail: [email protected]
[5], [6], [7], [8], [9], [10], [11], [12]. In these cases, analyticalmodels, or dq0-models, which frequently rely on fundamentalwave approximations and on a magnetic linear behavior ofthe motor, cannot describe the real PMSM behavior with highaccuracy. Nevertheless, control and fault detection strategiesare mostly based on such dq0-models, see, e.g., [11], [12],[13], [14], [15], [16], [17]. This, as a matter of fact, bringsalong that an optimal performance cannot be achieved forfault cases or in operating ranges with significant magneticsaturation.
A well established method to account for magnetic satura-tion, non-fundamental wave behavior and asymmetrical oper-ation of a PMSM are finite element (FE) models. FE modelscontain detailed information about the magnetic field in theelectric machine. They allow for an accurate considerationof complex geometries and saturation effects, see, e.g., [8],[18], [19]. Their relatively high complexity, however, resultsin a high computational effort, which makes FE models hardlysuitable for the design of model based real-time fault detectionor control algorithms.
Magnetic equivalent circuit (MEC) models provide a goodcompromise between model complexity and accuracy. There-fore, they are a good basis for fast dynamical simulationsand the model-based design of control and fault detectionstrategies. It is easily possible to systematically include thenonlinear material behavior and inhomogeneous air gap ge-ometries in MEC models, see, e.g., [20], [21], [22], [23]. Inthe authors’ previous works [22], [23], it was shown thatthe application of network theory allows for a systematicderivation of the model equations even for large MECs. Allthese works lack the systematic incorporation of the electricinterconnection of the motor coils with each other and to otherelectric components (e.g. a cable or an inverter) into the MECmodel.
Therefore, a novel modeling framework for real-time ap-plications of (nonlinear) electromagnetic actuators, includingboth the magnetic and the electric circuit utilizing graphtheory, is presented in this paper. It will be shown that asystematic and accurate description of PMSMs under healthyand faulty conditions is possible. In particular, a (turn-to-turn)short circuit between the windings of a stator coil of a PMSMcan be considered in a straightforward way. The foundation ofthis approach is the application of network theory to both theMEC and the electric network, cf. [23], [24], [25].
The model proposed in this paper is intended to serve as a
Post-print version of the article: G. Forstner, A. Kugi, and W. Kemmetmüller, �A magnetic equivalent circuit based modeling framework forelectric motors applied to a pmsm with winding short circuit,� IEEE Transactions on Power Electronics, vol. 35, no. 11, pp. 12 285�12 295,2019The content of this post-print version is identical to the published paper but without the publisher's �nal layout or copy editing.

IEEE POWER ELECTRONICS VOL. ??, NO. ?? 2
basis for the design of model-based control, observer and faultdetection strategies. For these tasks, an accurate descriptionof the input-to-output behavior in the entire operating rangeis essential, while high accuracy of, e.g., the flux densities inthe machine is of less importance.
The paper is structured as follows: In Section II, a frame-work for the systematic modeling of nonlinear electromagneticnetworks coupled with nonlinear electric networks is derived.The proposed framework is applied to the modeling of a three-phase PMSM with a short circuit between the windings ofone stator coil in Section III. Section IV deals with the modelcalibration and the validation by measurement results. Finally,a short conclusion and an outlook on future research is givenin Section V.
II. MODELING FRAMEWORK FOR ELECTROMAGNETICACTUATORS
In this section, a framework for the systematic mathematicalmodeling of electromagnetic actuators is presented, whichcomprises two main parts.
MEC model: The magnetic part of the electromagneticactuator is described by an MEC model that basically describesthe magnetic flux and magneto motive forces (mmf) in theactuator. It contains mmf sources to represent the coils andpermanent magnets. Magnetic permeances are used to describethe core and the air gap. The magnetically linear air gappermeances are in general (nonlinear) functions of the positionof the moving parts of the electromagnetic actuator (e.g. therotor in the case of an electric machine). The permeances ofthe core are nonlinear functions of the corresponding mmf toaccount for magnetic saturation.
Electric network: The electric interconnection of the coilsof the electromagnetic actuator is described by an electricnetwork. It consists of voltage and current sources, (nonlinear)electric resistors, (nonlinear) capacitors and (nonlinear) induc-tors. In this electric network, the coils of the electromagneticactuator are represented by magnetically coupled (nonlinear)inductors.
The MEC and the electric network are coupled by the coilsof the electromagnetic actuator. This means that the electriccurrents of the coils define the mmf of the corresponding mmfsources in the MEC, while the fluxes of these mmf sourcesdefine the flux linkage of the corresponding inductors in theelectric network. Starting from the equations of the MEC andthe electric network, an overall mathematical model of theelectromagnetic actuator is derived in the next subsections.
A. MEC Model
The magnetic part of the electromagnetic actuator is mod-eled by an MEC, see, e.g., [20], [23], [26]. The topology ofthe MEC can be described via network theory by defining atree, which connects all nodes of the network without formingany meshes, see, e.g., [24]. In general, the choice of the treeis arbitrary but all mmf sources must be placed in the tree.Given a suitable tree, the topology of the network (i.e. theinterconnection of the network components) is described bythe incidence matrix DT = [DT
c ,DTm,D
Tg ]. This matrix can
be separated into a part Dc linking the coils in the tree withthe co-tree elements, a part Dm defining the interconnectionof the tree magnets with the co-tree elements and a part Dg ,which connects the tree permeances with the co-tree elements.Following the ideas and steps described in [23], the MEC canbe described by the set of (nonlinear) algebraic equations
[DcGcDT
c DcGcDTg
DgGcDTc Gt + DgGcDT
g
] [iLutg
]=
[ψL0
]−[Dc
Dg
]GcDT
mutm.
(1)
Therein, Dc = NcDc with Nc = diag[Nc,1, . . . , Nc,nc]is used, where Nc,j is the number of turns of a coilj = 1, . . . , nc. The nonlinear magnetic permeances withinthe tree and co-tree are described by the diagonal matri-ces Gt (utg, ϕ) and Gc (uc, ϕ), respectively. They are func-tions of the mmf utg of the tree permeances and the mmfuc = −DT
[uTtc uT
tm uTtg
]Tof the co-tree permeances. Fur-
thermore, they are nonlinear functions of the mechanical de-grees of freedom, which is the rotor angle ϕ for the consideredmotor. The mmf of the coils utc are calculated from the coilcurrents iL by utc = NciL, utm describes the equivalent mmfof the permanent magnets and ψL are the flux linkages of thecoils of the motor, see [23] for a detailed description. Finally,the electromagnetic torque τ of the electromagnetic actuatoris given by
τ =1
2
(uTtg
∂Gt∂ϕ
utg + uTc
∂Gc∂ϕ
uc
). (2)
B. Electric Network
The electric interconnection of the electromagnetic actu-ator’s coils is represented by an electric network. It cancomprise capacitors (index C), resistors (index R), voltagesources (index V ), current sources (index I) and inductors.The inductors are divided into magnetically coupled inductors(index L), which represent the actuator coils, and magneticallyuncoupled inductors (index L), which, e.g., represent theinductance of long electric cables or the inverter.
The topology of the electric network is again described vianetwork theory by defining a suitable tree, see, e.g., [24], [25].The choice of the tree is arbitrary, but all voltage sources mustbe included in the tree and all current sources must be placedin the co-tree. The resulting circuit equations are given by
it = Eic (3a)
vc = −ETvt, (3b)
where E is the incidence matrix of the electric network. Thecurrents and voltages of the tree elements are given by it andvt. Further, ic and vc denote the currents and voltages ofthe co-tree elements. A beneficial structure of the incidencematrix E is achieved when the maximum number of capacitorsis placed in the tree and the maximum number of inductorsis placed in the co-tree, cf. [25]. In the case when a nodeis connected to inductors only, the maximum number of
Post-print version of the article: G. Forstner, A. Kugi, and W. Kemmetmüller, �A magnetic equivalent circuit based modeling framework forelectric motors applied to a pmsm with winding short circuit,� IEEE Transactions on Power Electronics, vol. 35, no. 11, pp. 12 285�12 295,2019The content of this post-print version is identical to the published paper but without the publisher's �nal layout or copy editing.

IEEE POWER ELECTRONICS VOL. ??, NO. ?? 3
magnetically uncoupled inductors should be placed in the co-tree. If the currents of the tree and co-tree are arranged in theform
it =[iTtC iTtV iTtR iT
tLiTtL
]T(4a)
ic =[iTcC iTcR iTcI iT
cLiTcL
]T(4b)
then the incidence matrix reads as [25]
E =
ECC ECR ECI ECL ECL0 EV R EV I EV L EV L0 ERR ERI ERL ERL0 0 0 ELL ELL0 0 0 0 ELL
. (5)
The electric network model is completed by the balance andconstitutive equations of the network elements, which areformulated in the following.
1) Capacitors: The electric charge Q of a capacitor isdescribed by the nonlinear relation Q = C(v)v, where C(v)defines the voltage-dependent capacitance and v is the electricvoltage at the capacitor. Applying this constitutive equation tothe capacitors of the electric network gives
[QtC
QcC
]=
[CtC 00 CcC
] [vtC
−ETCCvtC
], (6)
where QtC and QcC describe the electric charges of thecapacitors in the tree and co-tree, respectively. The electriccharge is described by the balance of charge in the form
d
dtQtC = ECC icC + ECRicR
+ ECI icI + ECLicL + ECLicL
(7a)
d
dtQcC = icC . (7b)
2) Resistors: The constitutive equations of the (nonlinear)resistors are written in the form
[itRicR
]=
[GtR 00 GcR
] [vtRvcR
], (8)
where GtR (vtR) and GcR (vcR) define the (voltage-dependent) conductances of the resistors within the tree andco-tree, respectively. The currents itR can be expressed asitR = ERRicR + ERI icI + ERLicL + ERLicL according to(3)-(5). Furthermore, vcR = −ET
CRvtC−ETV RvtV −ET
RRvtRholds. Utilizing these results yields the set of nonlinear alge-braic equations
[GtR −ERRGcR
ETRR I
] [vtRvcR
]=
[ERI icI + ERLicL + ERLicL−ET
CRvtC −ETV RvtV
],
(9)
which has to be solved for vtR and vcR, where I describesthe identity matrix of suitable dimension.
3) Inductors: As mentioned before, the inductive circuitelements are divided into magnetically coupled and uncou-pled inductors. The magnetically coupled inductors representthe magnetic part of the electromagnetic actuator (or otherelectromagnetically coupled inductors as, e.g., transformers),whose equations are given in Section II-A. The differentialequations of the flux linkages are defined by Faraday’s law ofinduction
d
dtψtL = vtL (10a)
d
dtψcL = −ET
CLvtC −ETV LvtV −ET
RLvtR −ETLLvtL,
(10b)
where ψtL and ψcL are the flux linkages of the coils thatare placed in the tree and co-tree of the electric network,respectively. Note that by a suitable arrangement of the entriesof ψL, ψT
L= [ψT
tL,ψT
cL] and iT
L= [iT
tL, iTcL
] hold.The magnetically uncoupled inductors are modeled by the
nonlinear constitutive equations[ψtLψcL
]
︸ ︷︷ ︸ψL
=
[LtL 00 LcL
]
︸ ︷︷ ︸LL
[itLicL
]
︸ ︷︷ ︸iL
, (11)
where the positive definite inductance matrix LL is in generala nonlinear function of the currents itL = ELLicL and icL.The differential equations of the flux linkages ψtL and ψcLfollow as
d
dtψtL = vtL (12a)
d
dtψcL = −ET
CLvtC −ET
V LvtV −ET
RLvtR
−ETLL
vtL −ETLL
vtL.(12b)
C. Elimination of Dependent Variables
The MEC model and the equations of the electric in-terconnection given in Section II-A and II-B describe theoverall behavior of the electromagnetic actuator. It, however,contains a number of dependent variables, whose eliminationis meaningful, both for fast numeric simulations and for amodel-based controller design. This section is thus concernedwith the derivation of a mathematical model with a minimumnumber of state variables.
To do so, first the charges of the capacitors are considered. Itis obvious that the voltage vtC can be calculated as a functionof the variable QtC by solving (6). This implies that thecharge QcC is a dependent variable, since it can be expressedas QcC = −CcCE
TCCvtC(QtC). To eliminate the unknown
current icC from the set of equations, the new (independent)state QI
C = QtC −ECCQcC is introduced
QIC =
[CtC + ECCCcCE
TCC
]vtC . (13)
This independent state QIC is described by the nonlinear
differential equation
d
dtQIC = ECRicR + ECI icI + ECLicL + ECLicL. (14)
Post-print version of the article: G. Forstner, A. Kugi, and W. Kemmetmüller, �A magnetic equivalent circuit based modeling framework forelectric motors applied to a pmsm with winding short circuit,� IEEE Transactions on Power Electronics, vol. 35, no. 11, pp. 12 285�12 295,2019The content of this post-print version is identical to the published paper but without the publisher's �nal layout or copy editing.

IEEE POWER ELECTRONICS VOL. ??, NO. ?? 4
The inductor currents are determined by the co-tree currentsicL and icL since
[iLiL
]=
ELL 0I 0
ELL ELL0 I
︸ ︷︷ ︸VIL
[icLicL
]
︸ ︷︷ ︸icL
=
[VIL
VIL
]icL (15)
holds, cf. (3a). Utilizing this result in (1) and (11) gives
LLVIL
0
DcGcDTc V
IL
DcGcDTg
DgGcDTc V
IL
Gt + DgGcDTg
[icLutg
]=
ψLψL0
−
0Dc
Dg
GcDT
mutm.
(16)
Additionally, (15) implies that not all flux linkages ψTL =
[ψTL,ψT
L] are independent variables, which is further con-
firmed by the fact that (16) has more equations than unknownvariables icL, icL, utg . To separate the dependent from theindependent variables, the matrix V⊥L
V⊥L =
[V⊥L
V⊥L
]=
I 0−ET
LL−ET
LL0 I0 −ET
LL
(17)
is introduced, where (V⊥L )TVIL = 0 and (VI
L)TV⊥L = 0holds. This allows to define the transformation matrix Te =diag[TeL, I] with
TeL =
[(V⊥L )T
(VIL)T
]=
[(V⊥
L)T (V⊥
L)T
(VIL
)T (VIL
)T
]. (18)
Utilizing this transformation the independent flux linkageψIL = (VI
L)TψL and the dependent flux linkages ψ⊥L =(V⊥L )TψL of the inductor elements are defined. The dif-ferential equations for the independent flux linkages ψI
L=
ETLLψtL+ψcL+ET
LLψtL and ψI
L= ET
LLψtL+ψcL read as
d
dt
[ψIL
ψIL
]=
[−ETCL
vtC −ETV L
vtV −ETRL
vtR
−ETCL
vtC −ETV L
vtV −ETRL
vtR
]. (19)
Applying Te to the set of algebraic equations (16) gives, aftersome calculations,
KL
icLicLutg
=
ψIL
ψIL0
−
Dc
Dc
Dg
GcDT
mutm, (20)
with
KL =
L + DcGcDT
c DcGcDTc DcGcDT
g
DcGcDTc DcGcDT
c DcGcDTg
DgGcDTc DgGcDT
c Gt + DgGcDTg
,
(21)
L = ETLL
LtLELL + LcL, Dc = [ETLL, I]Dc and Dc =
[ETLL,0]Dc. Furthermore, the relation for the dependent flux
linkages
ψ⊥L =((V⊥
L)TLLV
IL
+ (V⊥L )TDcGcDTc V
IL
)icL
+ (V⊥L )TDcGcDTg utg + (V⊥L )TDcGcDT
mutm,(22)
can be obtained. Note that the dependent flux linkage ψ⊥L doesnot appear in the remaining set of equations (20) and thereforewill not be considered in the subsequent derivations.
Summing up, the steps described so far allow to eliminatethose parts of the variables which are dependent due to theinterconnection of the electric components. In the next step,the question if the algebraic equations (20) have a uniquesolution will be discussed.
Remark 1. The existence and uniqueness of a solution of(20) is equivalent to proving that KL is positive definite. Todo so, note that Gc, Gt and L are positive definite matrices byconstruction. Then it can be shown that KL is positive definiteif and only if Dc has full row rank, i.e. it comprises linearlyindependent rows. The proof of this statement is rather lengthybut straightforward and thus skipped in this paper.
Let us now assume that Dc has dependent rows, which canarise due to the magnetic coupling of the coils within theMEC. Then, the non-singular transformation matrix Tm =diag[I,TmL, I], with
TmL =
[T⊥mL
TImL
](23)
can be defined. Therein, TImL
spans the image of DTc and
T⊥mL
corresponds to the orthogonal space of TImL
, i.e.T⊥mL
Dc = 0 holds.
Remark 2. It is always possible to define the matricesT⊥mL
, TImL
in a way that the transformation matrix TmL
is orthogonal, i.e. that T−1mL
= TTmL
holds.
This transformation matrix is now applied to (20) in theform
TmKLTTm︸ ︷︷ ︸
KIL
Tm
icLicLutg
= Tm
ψIL
ψIL0
−Tm
Dc
Dc
Dg
GcDT
mutm.
(24)
Using the abbreviation TImL
Dc = DIc , the matrix KI
L is givenby
KIL =
L+ DcGcD
Tc 0 DcGc(D
Ic)
T DcGcDTg
0 0 0 0
DIcGcD
Tc 0 DI
cGc(DIc)
T DIcGcD
Tg
DgGcDTc 0 DgGc(D
Ic)
T Gt +DgGcDTg
(25)
Post-print version of the article: G. Forstner, A. Kugi, and W. Kemmetmüller, �A magnetic equivalent circuit based modeling framework forelectric motors applied to a pmsm with winding short circuit,� IEEE Transactions on Power Electronics, vol. 35, no. 11, pp. 12 285�12 295,2019The content of this post-print version is identical to the published paper but without the publisher's �nal layout or copy editing.

IEEE POWER ELECTRONICS VOL. ??, NO. ?? 5
and the vector of unknown variables can be formulated as
Tm
icLicLutg
=
icLT⊥mL
icLTImL
icLutg
=
icLi⊥cL
iIcLutg
. (26)
Furthermore, the application of the transformation to the right-hand side of (24) yields
Tm
ψIL
ψIL0
=
ψIL
T⊥mLψIL
TImLψIL
0
=
ψIL
ψI⊥L
ψIIL0
(27)
and
Tm
Dc
Dc
Dg
GcDT
mutm =
Dc
0
DIc
Dg
GcDT
mutm. (28)
It can be directly concluded that ψI⊥L
= 0 must hold andi⊥cL
no longer appears in these equations. With these results,a reduced set of algebraic equations is defined by
KILr
icLiIcLutg
=
ψIL
ψIIL0
−
Dc
DIc
Dg
GcDT
mutm, (29)
where KILr results from (25) by eliminating the zero rows and
columns.In the final step, the transformation is applied to the dif-
ferential equations for the independent flux linkages (19). Ob-viously, the differential equations for ψI
Lremains unchanged
and since ψI⊥L
= T⊥mLψIL
= 0, the differential equation forψIL
is split up in an algebraic equation
0 = T⊥mL(−ET
CLvtC −ETV LvtV −ET
RLvtR)
(30)
and a differential equation for ψIIL
= TImLψIL
d
dtψIIL = TI
mL
(−ET
CLvtC −ETV LvtV −ET
RLvtR). (31)
In conclusion, the overall mathematical model of the elec-tromagnetic actuator, including its electric interconnection isgiven by a system of differential algebraic equations (DAEs),with the differential equations (14) for QI
c , (19) for ψIL
and(31) for ψII
L. The algebraic equations are given by (9), (13),
(22), ψI⊥cL
= 0, (29) and (30). Finally, the torque results from(2).
Remark 3. The final DAE system is of index 1 and has aminimum number of states and algebraic variables. Its ratherlow numerical complexity allows for fast dynamic simulationsand serves as a basis for the design of model-based controlstrategies, as, e.g., model-predictive control. If the magneticsaturation can be neglected and the electric components arelinear, the resulting set of linear algebraic equations can besolved analytically, which results in a system of ordinarydifferential equations for the overall mathematical model ofthe electromagnetic actuator.
stator
rotor
permanentmagnets
1
2
3
4
56
7
8
9
10
11
12
1
2
3
45
6
7
8
Fig. 1: Schematic of the considered three-phase PMSM.
Remark 4. At a first glace, the proposed framework mightseem to be rather complex due to the inherent reductionsteps, which are based on linear algebra. It should, however,be noted that given an MEC and the electric network, allsteps can be automated utilizing a computer algebra pro-gram. Currently, the authors are working on implementing theproposed modeling framework in a MAPLE package, whichautomatically derives all model equations and an (optimized)simulation code for MATLAB.
III. MODEL OF A THREE-PHASE PMSM WITH WINDINGSHORT CIRCUIT
In this section, the modeling framework described in theprevious section is applied to systematically derive a mathe-matical model for a three-phase permanent magnet syn-chronous motor (PMSM) with a (turn-to-turn) winding shortcircuit of a stator coil. The considered PMSM comprises 12single tooth coils, 8 internal permanent magnets, a skewedstator and an inhomogeneous air gap, see Figure 1. It is usedin an automotive power steering application, where saturationof the stator may occur in typical operating scenarios. Safetyis a very important feature for this type of application. Thus,it is required that typical fault cases, as the turn-to-turnwinding short circuit, are taken into account in the designand operation of (model-based) control strategies. Therefore,a computationally efficient model which accurately covers alsothese fault cases is required.
Following the procedure in Section II, first an MEC modelis derived for the motor. The schematic of the MEC is depictedin Fig. 2. The main components are the mmf sources of thecoils and the magnets, the nonlinear permeances of the statorand rotor, and the position-dependent air gap permeances.This choice of the MEC model is based on results knownform the literature, in particular [20], [21], [22], [23], [26].In comparison to the models described in these references,an additional mmf source is utilized to model the turn-to-turnwinding short circuit of the affected coil.
Post-print version of the article: G. Forstner, A. Kugi, and W. Kemmetmüller, �A magnetic equivalent circuit based modeling framework forelectric motors applied to a pmsm with winding short circuit,� IEEE Transactions on Power Electronics, vol. 35, no. 11, pp. 12 285�12 295,2019The content of this post-print version is identical to the published paper but without the publisher's �nal layout or copy editing.

IEEE POWER ELECTRONICS VOL. ??, NO. ?? 6
utc1 utc2utc3o
utc3sc
utc12
Gst1 Gst2 Gst3 Gst12
Gsy12 Gsy23 Gsy1112
Gsy121
Gsl12 Gsl23 Gsl1112
Gsl121
utm1 utm2 utm3 utm8
Ga11 Ga22 Ga33 Ga128
Gm1 Gm2 Gm3 Gm8
Gr12 Gr23 Gr78
Gr81
Grb12 Grb23 Grb78
Grb81
Fig. 2: Schematic of the MEC of the three-phase PMSM witha winding short circuit in coil 3. The tree of the network isindicated in blue with the corresponding co-tree in red. Themagnetic model of the turn-to-turn short circuit is highlightedby the dashed box.
It is assumed that the short circuit affects coil 3. The turn-to-turn winding short circuit of this coil is modeled by splittingthe coil into a part of Nsc shorted windings and NL − Nscwindings of the healthy coil, where NL is the number ofwindings of a stator coil. This is reflected in the MEC bytwo mmf sources utc3o and utc3sc in the stator tooth 3. Thefull range from a complete short circuit to a short circuitaffecting one turn of coil 3 can be represented by changing thenumber Nsc. The remaining structure of the MEC is designedanalogously to the MEC model proposed in [23], where alsomore details on the specific choice of the network can befound.
The electric interconnection of the coils is depicted in Fig. 3.In the considered system, the inverter is represented in anidealized form by the voltage sources va, vb and vc. The coilsare represented by the magnetically coupled inductors L andresistors R. Corresponding to the MEC, coil 3 is divided intothe resistance R3o and inductance L3o of the healthy part, andR3sc and L3sc of the short circuited part. The resistance of theshort circuit is described by Rsc. The tree in the schematic ofthe MEC in Fig. 2 and the electric interconnection in Fig. 3is indicated in blue with the corresponding co-tree in red.
The stator and rotor permeances of the motor can be directlymodeled by design data of the machine and constitutiveparameters of the material. Magnetic saturation of the statorand rotor is taken into account by nonlinear permeances Gtand Gc, which are defined as functions of the corresponding
R3o R3sc R6
R12R9
L3o L3sc L6
L12L9
Rsc
R2 R5
R8 R11
L2 L5
L8 L11
R1 R4
R7 R10
L1 L4
L7 L10
va vb vc
Fig. 3: Schematic of the electric interconnection of the three-phase PMSM with a winding short circuit in coil 3. The treeof the network is indicated in blue with the corresponding co-tree in red. The electric model of the turn-to-turn short circuitis highlighted by the dashed box.
mmfs. For instance a prismatic permeance of length l andarea A can be written in the form G = µ0µr(u/l)A/l, whereu is the mmf at the permeance and µr(H) = µr(u/l) is thenonlinear permeability function of the material, see [20], [23],[26] for a detailed discussion.
The air gap permeances are modeled by
Ga (ϕ) =
{Ga (ϕ) for− π/4 < ϕ < π/4
0 otherwise(32)
where the rotor angle ϕ is mapped to the interval [−π, π] bymeans of a modulo operation and Ga is defined by a Fourierseries. The air gap permeances cannot be accurately describedsolely based on the geometry of the motor, since it is hardlypossible to estimate the flux tube geometry of the air gap fromthe design data of the machine only. Thus, the coefficientsof a Fourier series are identified based on measurements(or FE simulations) such that the input-to-output behaviorof the model matches the measurements, see the discussionin Section IV. The air gap permeances are then defined byGajk = Ga(ϕ− (j− 1)π/6− (k− 1)π/4), with j = 1, . . . , 12and k = 1, . . . , 8.
The currents of the voltage sources itV , the resistive circuitelements itR and the magnetically coupled inductors itL in thetree of the electric network are given by
itV =[ia ib ic
]T(33a)
itR =[iR1 iR2 iR3o iR3sc . . . iR12 iRsc
]T(33b)
itL =[iL1 iL2 iL3o iL7 iL8 iL9
]T. (33c)
The co-tree comprises magnetically coupled inductors only,whose currents icL are summarized as
icL =[iL4 iL5 iL6 iL10 iL11 iL12 iL3sc
]T. (34)
Post-print version of the article: G. Forstner, A. Kugi, and W. Kemmetmüller, �A magnetic equivalent circuit based modeling framework forelectric motors applied to a pmsm with winding short circuit,� IEEE Transactions on Power Electronics, vol. 35, no. 11, pp. 12 285�12 295,2019The content of this post-print version is identical to the published paper but without the publisher's �nal layout or copy editing.

IEEE POWER ELECTRONICS VOL. ??, NO. ?? 7
The topology of the electric network can be formulatedaccording to (3) and (5) by
itVitRitL
=
EV LERLELL
icL. (35)
After eliminating the dependent variables due to the electricinterconnection, the MEC is described by
KL
[icLutg
]=
[ψIL0
]−[Dc
Dg
]GcDT
mutm, (36)
with
KL =
[DcGcDT
c DcGcDTg
DgGcDTc Gt + DgGcDT
g
]. (37)
The differential equation for the flux linkage reads asd
dtψIL = −RLicL −ET
V LvtV . (38)
The assumed linear behavior of the resistors allows to solveGtRvtR = ERLicL for vtR. Using this result in (19) gives(38), where the abbreviation RL = ET
RLG−1tRERL is intro-
duced.As discussed in Section II-C, the set of equations (36), (37)
has to be further reduced, if Dc has linear dependent rows,which is the case for the considered system. Proceeding alongthe steps of Section II-C, the final model of the consideredPMSM with (turn-to-turn) winding short circuit is given by
d
dtψIIL = −RLi
IcL − ET
V LvtV (39a)
KILr
[iIcLutg
]=
[ψIIL0
]−[DIc
Dg
]GcDT
mutm (39b)
τ =1
2
(uTtg
∂Gt∂ϕ
utg + uTc
∂Gc∂ϕ
uc
). (39c)
Here, the abbreviations
RL = TImL
(RL −RL(T⊥mL)T
(T⊥mLRL(T⊥mL)T
)−1T⊥mLRL
)(TI
mL)T(40)
and ETV L
= TImL
ETV L
are used. This final DAE has 6 statesψIIL
and 45 algebraic variables iIcL
, utg .
IV. MODEL CALIBRATION AND VALIDATION
Most of the model parameters of the proposed MEC canbe accurately determined based on the geometric data of themotor and the material data of the core and the permanentmagnets. In contrast, the value and shape of the air gappermeances Ga(ϕ) and the stator leakage permeances Gslcannot be accurately determined by construction data only,since it is difficult to estimate the leakage flux paths. Thesepermeances, however, strongly influence the behavior of themotor, in particular the torque. Thus, a calibration based onFE simulations or measurements is required for a high modelaccuracy.
In the following, a model calibration strategy for the pro-posed MEC model is described. Afterwards, the accuracy ofthe calibrated model is demonstrated for a number of typicaloperating points of the PMSM, which cover both the nominaloperation and the case of a winding short circuit.
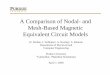
a b c d e f g
Fig. 4: Setup of the test stand: a PMSM under consideration, brotary encoder, c torque sensor, d fly wheel, e rotary encoder,f harmonic drive, g load motor.
TABLE I: Components of the test stand and measurementsetup.
Description DeviceMeasurement platform dSpace MicroLab Box 1202Current sensor Sensitec CMS30050ABAVoltage sensor Knick P27000 H1a test motor PMSM under considerationb rotary encoder w+s IH951c torque sensor KTR Dataflex 16/10d fly wheel Inertia J = 0.01 kgm2
e rotary encoder Heidenhain ERN1205000f load motor Harmonic Drive LynxDrive-20Cg load motor Dunker Motor BG75
A. Model Calibration
The model calibration described in this part is based onmeasurements of the PMSM on a test stand depicted in Fig. 4.Starting from the left, the test stand comprises the modeledPMSM which is coupled to a rotary encoder, followed by atorque sensor, a fly wheel, a second rotary encoder and a loadmachine. Depending on the experiment, the PMSM is eitherrotated at slow speed by a harmonic drive or driven at a higherspeed by a load motor. The main components of the test standand measurement setup are summarized in Table I.
The identification of the model parameters (i.e. the air gappermeances Ga(ϕ) and the stator leakage permeances Gsl) isdone for the healthy PMSM without a short circuit (Nsc = 0).This is reasonable, since the exact location and the numberof shorted windings Nsc will not be available in practicalapplications and thus would also not be feasible for a modelcalibration.
The model calibration is based on the following measure-ments:
1) In the first experiment, the PMSM is rotated at a veryslow speed of 1 rpm by the harmonic drive. Constant terminalcurrents ia = in, ib = −in and ic = 0 are applied, where inis the nominal current of the PMSM. The resulting torque τis measured in one electric period of ϕ = 0, . . . , 90° with astep size of 0.5°. This results in Nτ = 180 measurements ofthe torque τmk , the angle ϕmk and the terminal currents imtV,k =
[ima,k, imb,k, i
mc,k]T, k = 1, . . . , Nτ .
2) In addition to the torque, the flux linkage ψIIL
isan important quantity for the model calibration. A directmeasurement of the flux linkage is, as a matter of fact,typically not possible in a PMSM. Instead, measurements
Post-print version of the article: G. Forstner, A. Kugi, and W. Kemmetmüller, �A magnetic equivalent circuit based modeling framework forelectric motors applied to a pmsm with winding short circuit,� IEEE Transactions on Power Electronics, vol. 35, no. 11, pp. 12 285�12 295,2019The content of this post-print version is identical to the published paper but without the publisher's �nal layout or copy editing.

IEEE POWER ELECTRONICS VOL. ??, NO. ?? 8
of the back emf of the motor for open terminals (terminalcurrents ia = ib = ic = 0) are performed at a constant speedn = 500 rpm. Using iI
cL= 0 and ψII
L(ϕ, iI
cL) = ψII
L(ϕ,0) in
(39a) gives
ψIIL (ϕ,0)−ψIIL (ϕ0,0) = − 1
ω
∫ ϕ
ϕ0
ETV Lv
mtV dϕ. (41)
The symmetry of the motor implies ψIIL
(ϕ,0) = −ψIIL
(ϕ +π/4,0), which allows to eliminate ψII
L(ϕ0,0) in (41). Then,
the flux linkage for zero currents can be calculated in the form
ψIIL (ϕ,0) =1
2ω
∫ ϕ+π/4
ϕ
ETV Lv
mtV dϕ. (42)
The flux linkage ψIIL
(ϕ,0) = ψIIpm(ϕ) is determined for astep size of 2°, which gives Nψ
ϕ = 45 flux linkage valuesψII,mpm,j at the angles ϕmj = jπ/90, j = 1, . . . , Nψ
ϕ .3) To obtain measurements of the flux linkage for non-zero
currents, sinusoidal terminal currents itV with a constant timeperiod Tψ = 2.5 ms and amplitude iψ , which is approximately75% of the maximum current of the PMSM, are applied by asimple current controller for fixed rotor angles ϕj = jπ/90,j = 1, . . . , Nψ
ϕ . According to (39a), the flux linkage can becalculated by
ψIIL (ϕj , iIcL(t)) = ψIIpm,j −
∫ t
0
(RLi
I,m
cL+ ET
V LvmtV
)dt.
(43)
This integral is evaluated for Nψi = 9 points with
t = tl for each angle ϕmj . This gives the flux linkageψII,mL
(ϕmj , iI,mcL
(tl)) = ψII,mL,jl
with the corresponding rotorangle ϕmj , j = 1, . . . , Nψ
ϕ and currents iI,mcL,l
, l = 1, . . . , Nψi .
Remark 5. The integration in (41) and (43) will have a drift ifnon-zero mean measurement errors are present in the voltageor current measurements. This drift, however, can be easilycompensated by exploiting the fact that ψII
L(ϕk, i
IcL
(t)) =ψIIL
(ϕk, iIcL
(t + Tψ)) and ψIIL
(ϕk, iIcL
(t)) = ψIIL
(ϕk +π/2, iI
cL(t)) hold for the motor without winding short circuits.
Based on these measurements, the air gap permeances Gaand the stator leakage permeances Gsl can be calibrated. Asbriefly discussed before, the shape of the air gap permeanceis given by (32). A Fourier series of order Na is utilized toapproximate Ga, i.e.
Ga (ϕ) = α0 +
Na∑
n=1
αncos(npϕ) + βnsin(npϕ), (44)
where p = 4 is the number of pole pairs of the PMSM. Forthe stator leakage permeances a nominal value can be approx-imated from geometry data in the form Gnomsl = Aslµ0/lsl,where Asl defines the area and lsl the length of the initial statorleakage permeance. It is assumed that the real stator leakagepermeance is given by Gsl = γGnomsl , with a scalar scaling pa-rameter γ. This results in the parameters α = [α0, . . . , αNa ]T,β = [β1, . . . , βNa ]T and γ, which have to be identified.
The parameter calibration problem is formulated as a con-strained optimization problem. The cost function J = Jτ+Jψ
to be minimized comprises a part Jτ , which penalizes thetorque error
Jτ = qτ
Nτ∑
k=1
(τ(ϕmk , i
I,mcL,k
,utg,k)− τmk)2
, (45)
where qτ > 0 is a scalar weighting parameter, and utg,k isdefined by (39b) in the form, see also (25)
gτk =(Gt(ϕmk ) + DgGc(ϕmk )DTg )utg,k
+ DgGc(ϕmk )((DIc)
TiI,mcL,k
+ DTmutm) = 0.
(46)
The second part Jψ of the cost function J is used to penalizeerrors in the flux linkage in the form
Jψ = qψ
Nψϕ∑
j=1
Nψi∑
l=1
(ψIIL (ϕmj , i
I,m
cL,l)−ψII,m
L,jl
)2
, (47)
with qψ > 0. The mmf utg,lj is defined similar to (46) by
gψlj =(Gt(ϕmj ) + DgGc(ϕmj )DTg )utg,lj
+ DgGc(ϕmj )((DIc)
TiI,mcL,l
+ DTmutm) = 0.
(48)
Furthermore, the torque τ(ϕmk , iI,mcL,k
,utg,k) and the flux link-age ψII
L(ϕmj , i
I,mcL,l
) are defined by (39b) and (39c), respec-tively.
With these prerequisites, a constrained parameter optimiza-tion problem can be formulated as
minX
J (49a)
s.t.0 = gτk , k = 1, . . . , Nτ (49b)
0 = gψlj , j = 1, . . . , Nψϕ , l = 1, . . . , Nψ
i , (49c)
where
X ={α,β, γ,utg,1, . . . ,utg,Nτ ,utg,11, . . . ,utg,NψϕNψi
}
(50)
summarizes all optimization variables. This rather large con-strained optimization problem is solved by applying the re-duced gradient method, see, e.g., [27], [28]. The main idea isto split the optimization variables into a set Xd of optimizationvariables that are fixed by the equality constraints and a set Xi
of independent optimization variables. This allows to partiallydecouple the solution of the nonlinear equality constraintsfrom the optimization. The mmf utg are chosen as dependentvariables, which leaves the unknown system parameters α, βand γ as the independent optimization variables. The resultingoptimization problem is iteratively solved in MATLAB. Thesolution time of the optimization problem is in the range of15 min on a PC with Intel Core I7 processor.
The resulting optimal shape of the air gap permeancesGa(ϕ) is depicted in Fig. 5. It constitutes a smooth andsymmetric function with a distinct fundamental wave whichagrees with the skewed stator of the considered PMSM.Furthermore, the optimal scaling factor of the stator leakagepermeance results in γ = 3.7, which implies that the nominalstator leakage permeance was assumed too small.
Post-print version of the article: G. Forstner, A. Kugi, and W. Kemmetmüller, �A magnetic equivalent circuit based modeling framework forelectric motors applied to a pmsm with winding short circuit,� IEEE Transactions on Power Electronics, vol. 35, no. 11, pp. 12 285�12 295,2019The content of this post-print version is identical to the published paper but without the publisher's �nal layout or copy editing.

IEEE POWER ELECTRONICS VOL. ??, NO. ?? 9
0 90 180 270 3600.0
0.5
1.0
1.5
rotor angle ϕ (°)
G a/G a,n
Ga11 Ga41 Ga71Ga101 Ga83 Ga67
Fig. 5: Shape of the optimal air gap permeances Gajk (ϕ)between individual coils j and magnets k.
0 20 40 60 80
−2.0
−1.0
0.0
1.0
2.0
rotor angle ϕ (°)
τ/τn
model
Fig. 6: Validation of the calibrated model for the nominalhealthy case: torque τ for terminal currents ia = ip, ib = −ipand ic = 0, with ip ranging from in/2 to 2in.
B. Model Validation
In this section, the accuracy of the calibrated model isevaluated by comparison with measurement results, both forthe nominal case and the case of a winding short circuit. Asmentioned before, the parameter identification was performedfor the healthy PMSM without a short circuit. Thus, in thefirst step the model accuracy for the nominal case of a healthyPMSM is evaluated.
Fig. 6 shows the comparison of the torque τ of the calibratedmodel with measurements for terminal currents ia = ip,ib = −ip and ic = 0, where ip ranges from in/2 to 2in.These results show that the proposed MEC model exhibits anexcellent accuracy of the torque in the entire feasible operatingrange of the PMSM. It should be noted that only measurementsat ip = in were used for the model calibration. A closerlook at the results in Fig. 6 reveals that the shape of thetorque has non-vanishing higher harmonics, which becomemore pronounced for higher currents. This can be attributed tothe magnetic saturation of the motor, which becomes larger forhigher currents. The results depicted in Fig. 6 thus also showthat magnetic saturation is accurately covered by the proposedmodel.
The second evaluation of the model is based on the reducedflux linkages ψII
L. Fig. 7 gives a comparison of the flux
linkage of the model with the flux linkage calculated fromcurrent and voltage measurements according to the descriptiongiven in the previous subsection. It can be observed that againa good matching of the model is achieved for the entireoperating range. Please note that the bend in the curve inFig. 7 for high values of iI
L,1and iI
L,2can again be attributed
−2 0 2 −4 −2 0 2 4
0.5
1
1.5
iIL,1/in iI
L,2/in
ψIIL,1/ψ
n
model
Fig. 7: Validation of the calibrated model for the nominalhealthy case: flux linkage ψI
L,1for a constant angle ϕ = 45°.
to magnetic saturation. This effect is also accurately capturedby the proposed model.
In the next step, the accuracy of the proposed model fora complete winding short circuit of coil 3 (Nsc = NL) isinvestigated. The PMSM is rotated at a constant speed ofn = 300 rpm and open terminals are considered in the firstexperiment. Fig. 8 depicts the results for the torque τ , thevoltages between the terminals va − vb, vb − vc, vc − va andthe current iRsc in the short circuit path. These results confirmthat the proposed model is able to accurately describe therelevant system variables also in the case of a winding shortcircuit. In particular, a good agreement of the resulting shortcircuit current iRsc and of the back emf at the terminals can beseen. The basic shape of the torque is also well described bythe proposed model. The higher harmonics within the torquemeasurements can be partially related to mechanical vibrationson the test stand.
Finally, Fig. 9 shows results of the PMSM with windingshort circuit of coil 3 (Nsc = NL) for different valuesof the rotational speed n. Again, a good accuracy of theproposed model is achieved, in particular for the voltagevc − va and the short circuit current iRsc. The slightly largerdeviations of the torque for the higher speed of n = 500 rpmis mainly attributed to additional mechanical vibrations onthe test stand, which become even more pronounced withincreasing speed. The torque sensor has a limited stiffness,which, in combination with the test and load motor, resultsin a weakly damped spring-damper system with a resonancefrequency at approximately n = 600 rpm. Therefore, notorque measurement results are included for n = 750 rpmand n = 1000 rpm in Fig. 9.
Note that for n = 1000 rpm the short circuit currentreaches almost 4 times the rated current of the machine. Thisvalue also corresponds to the maximum current allowed forthe considered PMSM. Thus, experiments with higher speedsare not possible without damage of the motor. Moreover,large currents also cause a significant heating of the coils.Consequently, this heating results in an increase of the elec-trical resistance and slightly smaller measured currents iRsccompared to the currents predicted by the model for higherspeeds of the PMSM.
Post-print version of the article: G. Forstner, A. Kugi, and W. Kemmetmüller, �A magnetic equivalent circuit based modeling framework forelectric motors applied to a pmsm with winding short circuit,� IEEE Transactions on Power Electronics, vol. 35, no. 11, pp. 12 285�12 295,2019The content of this post-print version is identical to the published paper but without the publisher's �nal layout or copy editing.

IEEE POWER ELECTRONICS VOL. ??, NO. ?? 10
−0.2
−0.1
0.0
τ/τn
−0.2
−0.1
0.0
0.1
0.2
v ph/vn
va − vb vb − vc vc − va
0 20 40 60 80−1.5−1.0−0.50.00.51.01.5
rotor angle ϕ (°)
i Rsc/i n
model
Fig. 8: Validation of the calibrated model for a winding shortcircuit in coil 3 at a rotational speed of n = 300 rpm and openterminals: torque τ , phase voltages vph between the terminalsand current iRsc in the short circuit path.
V. CONCLUSION AND OUTLOOK
A systematic modeling framework for electric machinesbased on magnetic equivalent circuits (MECs) was proposedin this paper. It extends earlier results in [23] by a systematicinclusion of the electric interconnection of the motor coils withother electric components, as, e.g., the cabling or the inverter.The main motivation for the proposed modeling approach isto obtain a model with a small complexity, which serves asa basis for fast dynamic simulations and for a model-basedcontroller and observer design. The proposed model is able toaccurately describe an electric machine in its entire operatingrange, including operating ranges with significant magneticsaturation and non-fundamental wave characteristics.
The feasibility of the proposed modeling framework wasdemonstrated by applying the method to the modeling of aPMSM. It was shown that the calibrated model exhibits ahigh accuracy in the overall operating range of the PMSM,including the failure case of a winding short circuit. Theresulting model is real-time capable, which is a prerequisitefor the design of optimal nonlinear control strategies or faultdetection algorithms, see, e.g., [29]. This modeling frameworkwas also successfully applied to a dual three-phase PMSMwith a short circuit between two terminals in [30]. A similarmodel accuracy could be obtained as in this work. In general,the proposed framework provides a systematic modeling toolfor a wide range of electric motor (real-time) applications withdifferent fault scenarios.
−0.4
−0.3
−0.2
−0.1
0.0
0.1
τ/τn
−0.4
−0.2
0.0
0.2
0.4
(vc−v a)/v n
0 20 40 60 80−4.0
−2.0
0.0
2.0
4.0
rotor angle ϕ (°)
i Rsc/in
100 rpm 200 rpm 300 rpm 400 rpm
500 rpm 750 rpm 1000 rpm model
Fig. 9: Validation of the calibrated model for a windingshort circuit in coil 3 at different rotational speeds fromn = 100 rpm to n = 1000 rpm and open terminals: torqueτ , voltage vc − va and current iRsc in the short circuit path.The rated speed of the considered motor is given by 1300 rpm.
Current work of the authors deals with the application ofthe approach described in this paper in a model-predictivecontrol strategy. First simulation results show a high potentialto improve the torque control accuracy both for the healthy andthe fault case in comparison to the state of the art. Furthermore,the use of the model in fault detection and isolation strategies,in particular for multi-phase PMSMs, is a current field ofresearch. Finally, it is worth noting that the proposed modelingframework can be extended to consider temperature effectsthat result from a heating of the coils or permanent magnets.A possible way to do this is by augmenting the MEC modelby a thermal model, e.g. in the form of a lumped thermalnetwork. Current research of the authors is also directed inthe combination of such a thermal network model with theproposed MEC model.
REFERENCES
[1] P. P. Florin, R. Mircea, P. Adrian-Cornel, R. Martis, and C. Martis,“Comparative analysis for an electric power steering system,” in Proc. ofthe 2018 XIII International Conference on Electrical Machines (ICEM),Alexandroupoli, Greece, 2018, pp. 590–596.
[2] R. Menon, A. H. Kadam, N. A. Azeez, and S. S. Williamson, “Acomprehensive survey on permanent magnet synchronous motor drivesystems for electric transportation applications,” in Proc. of the IECON2016 - 42nd Annual Conference of the IEEE Industrial ElectronicsSociety, Florence, Italy, 2016, pp. 6627–6632.
Post-print version of the article: G. Forstner, A. Kugi, and W. Kemmetmüller, �A magnetic equivalent circuit based modeling framework forelectric motors applied to a pmsm with winding short circuit,� IEEE Transactions on Power Electronics, vol. 35, no. 11, pp. 12 285�12 295,2019The content of this post-print version is identical to the published paper but without the publisher's �nal layout or copy editing.

IEEE POWER ELECTRONICS VOL. ??, NO. ?? 11
[3] M. Zafarani, E. Bostanci, Y. Qi, T. Goktas, and B. Akin, “Interturn short-circuit faults in permanent magnet synchronous machines: An extendedreview and comprehensive analysis,” IEEE Trans. Emerg. Sel. TopicsPower Electron., vol. 6, no. 4, pp. 2173–2191, 2018.
[4] S. Grubic, J. M. Aller, B. Lu, and T. G. Habetler, “A survey on testingand monitoring methods for stator insulation systems of low-voltageinduction machines focusing on turn insulation problems,” IEEE Trans.Ind. Electron., vol. 55, no. 12, pp. 4127–4136, 2008.
[5] P. Arumugam, T. Hamiti, and C. Gerada, “Modeling of different windingconfigurations for fault-tolerant permanent magnet machines to restraininterturn short-circuit current,” IEEE Trans. Energy Convers., vol. 27,no. 2, pp. 351–361, 2012.
[6] L. Belguerras, J. Arellano-Padilla, P. Arumugam, T. Hamiti, S. Mezani,and C. Gerada, “Non-linear circuit based model of permanent magnetsynchronous machine under inter-turn fault: a simple approach based onhealthy machine data,” IET Electric Power Applications, vol. 10, no. 6,pp. 560–570, 2016.
[7] H. Qian, H. Guo, and X. Ding, “Modeling and analysis of interturnshort fault in permanent magnet synchronous motors with multistrandswindings,” IEEE Trans. Power Electron., vol. 31, no. 3, pp. 2496–2509,2016.
[8] Y. Qi, E. Bostanci, V. Gurusamy, and B. Akin, “A comprehensiveanalysis of short-circuit current behavior in pmsm interturn short-circuitfaults,” IEEE Trans. Power Electron., vol. 33, no. 12, pp. 10 784–10 793,2018.
[9] Z. Sun, J. Wang, D. Howe, and G. Jewell, “Analytical prediction ofthe short-circuit current in fault-tolerant permanent-magnet machines,”IEEE Trans. Ind. Electron., vol. 55, no. 12, pp. 4210–4217, 2008.
[10] B. Sen and J. Wang, “Stator interturn fault detection in permanent-magnet machines using pwm ripple current measurement,” IEEE Trans.Ind. Electron., vol. 63, no. 5, pp. 3148–3157, 2016.
[11] J. Harsjo and M. Bongiorno, “Modeling and harmonic analysis of apermanent magnet synchronous machine with turn-to-turn fault,” inProc. of the 17th European Conference on Power Electronics andApplications, EPE-ECCE Europe 2015, Geneva, Switzerland, 2015, pp.1–10.
[12] M. A. Mazzoletti, G. R. Bossio, C. H. D. Angelo, and D. R. Espinoza-Trejo, “A model-based strategy for interturn short-circuit fault diagnosisin pmsm,” IEEE Trans. Ind. Electron., vol. 64, no. 9, pp. 7218–7228,2017.
[13] O. Dieterle, T. Greiner, and P. Heidrich, “Control of a pmsm withquadruple three-phase star-connected windings under inverter short-circuit fault,” IEEE Trans. Ind. Electron., vol. 66, no. 1, pp. 685–695,2019.
[14] B.-G. Gu, J.-H. Choi, and I.-S. Jung, “Development and analysis ofinterturn short fault model of pmsms with series and parallel windingconnections,” IEEE Trans. Power Electron., vol. 29, no. 4, pp. 2016–2026, 2014.
[15] W. Wang, J. Zhang, M. Cheng, and S. Li, “Fault-tolerant control ofdual three-phase permanent-magnet synchronous machine drives underopen-phase faults,” IEEE Trans. Power Electron., vol. 32, no. 3, pp.2052–2063, 2017.
[16] P. C. Krause, O. Wasynczuk, and S. D. Sudhoff, Analysis of electricmachinery and drive systems. Piscataway, USA: IEEE Press, 2002.
[17] J. Chiasson, Modeling and High-Performance Control of Electric Ma-chines. New Jersey, USA: John Wiley & Sons, 2005.
[18] G. Choi and T. M. Jahns, “Pm synchronous machine drive response toasymmetrical short-circuit faults,” IEEE Trans. Ind. Electron., vol. 52,no. 3, pp. 2176–2185, 2016.
[19] M. Fitouri, Y. Bensalem, and M. N. Abdelkrim, “Modeling and detectionof the short-circuit fault in pmsm using finite element analysis,” IFAC-PapersOnLine, vol. 49, no. 12, pp. 1418–1423, 2016.
[20] V. Ostovic, Dynamics of saturated electric machines. New York, USA:Springer, 1989.
[21] P. Naderi, “Magnetic-equivalent-circuit approach for inter-turn and de-magnetisation faults analysis in surface mounted permanent-magnetsynchronous machines using pole specific search-coil technique,” IETElectric Power Applications, vol. 12, no. 7, pp. 916–928, 2018.
[22] D. Faustner, W. Kemmetmuller, and A. Kugi, “Magnetic equivalentcircuit modeling of a saturated surface-mounted permanent magnetsynchronous machine,” IFAC-PapersOnLine, vol. 48, no. 1, pp. 360–365, 2015.
[23] W. Kemmetmuller, D. Faustner, and A. Kugi, “Modeling of a permanentmagnet synchronous machine with internal magnets using magneticequivalent circuits,” IEEE Trans. Magn., vol. 50, no. 6, pp. 1–14, 2014.
[24] N. Christofides, Graph Theory: An Algorithmic Approach. AcademicPress, 1975.
[25] A. Kugi, Non-linear Control Based on Physical Models. London, UK:Springer, 2001.
[26] D. Hanselman, Brushless Permanent Magnet Motor Design, secondedition ed. Orono, USA: The Writers’ Collective, 2003.
[27] L. T. Biegler, Nonlinear Programming: Concepts, Algorithms, andApplications to Chemical Processes. Philadelphia, USA: Society forIndustrial and Applied Mathematics, 2010.
[28] D. G. Luenberger and Y. Ye, Linear and Nonlinear Programming.Basel, Switzerland: Springer, 2016.
[29] W. Kemmetmuller, D. Faustner, and A. Kugi, “Optimal torque controlof permanent magnet synchronous machines using magnetic equivalentcircuits,” Mechatronics, vol. 32, no. 1, pp. 22–33, 2015.
[30] G. Forstner, A. Kugi, and W. Kemmetmuller, “Magnetic equivalentcircuit model of a dual three-phase pmsm with winding short circuit,”in Proc. of the IECON 2019 - 45th Annual Conference of the IEEEIndustrial Electronics Society, Lisbon, Portugal, 2019, pp. 1177–1182.
Gabriel Forstner (S’19) received the Dipl.-Ing.degree in information technology from the Univer-sity Klagenfurt, Austria. He is currently workingtowards the Ph.D. degree in control engineering withthe Automation and Control Institute (ACIN), TUWien, Austria. His main research interests includethe physics based modeling and the optimal controlof mechatronic systems with a focus on permanentmagnet synchronous motors.
Andreas Kugi (SM’19) received the Dipl.-Ing. de-gree in electrical engineering from TU Graz, Austria,the Ph.D. degree in control engineering and theHabilitation degree in automatic control and con-trol theory from Johannes Kepler University (JKU),Linz, Austria. He was an Associate Professor withJKU from 2000 to 2002 and a Full Professor withSaarland University, Germany from 2002 to 2007.Since 2007, he has been the Head of the Automationand Control Institute (ACIN), TU Wien, Austria, andsince 2017, he is also the Head of the Center for
Vision, Automation & Control at the Austrian Institute of Technology (AIT).His main research interests include the modeling, control and optimizationof complex dynamical systems, the mechatronic system design as well asrobotics and process automation. He is full member of the Austrian Academyof Sciences and member of the German National Academy of Science andEngineering (acatech).
Wolfgang Kemmetmuller (M’04) received theDipl.-Ing. degree in mechatronics from the JohannesKepler University Linz, Austria, his Ph.D. (Dr.-Ing.) degree in control engineering from SaarlandUniversity, Saarbruecken, Germany and the Habili-tation degree in system theory and automatic controlfrom TU Wien, Vienna, Austria. He is AssociateProfessor at the Automation and Control Institute(ACIN), TU Wien. His research interests include thephysics based modeling and the nonlinear control ofmechatronic systems with a special focus on power
electronics, electrohydraulic and electromechanical systems.
Post-print version of the article: G. Forstner, A. Kugi, and W. Kemmetmüller, �A magnetic equivalent circuit based modeling framework forelectric motors applied to a pmsm with winding short circuit,� IEEE Transactions on Power Electronics, vol. 35, no. 11, pp. 12 285�12 295,2019The content of this post-print version is identical to the published paper but without the publisher's �nal layout or copy editing.