-
7/23/2019 A Dispersion Minimizing Finite Difference Scheme and
Precond - Chen Et Al - 2012
1/24
A dispersion minimizing finite difference scheme and
preconditioned
solver for the 3D Helmholtz equationq
Zhongying Chen a,1, Dongsheng Cheng a,, Tingting Wu b
a Guangdong Province Key Laboratory of Computational Science,
Sun Yat-sen University, Guangzhou 510275, PR Chinab School of
Mathematical Sciences, Shandong Normal University, Jinan 250014, PR
China
a r t i c l e i n f o
Article history:
Received 29 November 2011Received in revised form 27 July
2012Accepted 30 July 2012Available online 17 August 2012
Keywords:
Helmholtz equationPerfectly matched layerFinite difference
methodPreconditionerBi-CGSTABShifted-LaplacianMultigridProlongation
operator
a b s t r a c t
In this paper, a new27-point finite difference method is
presented for solving the3D Helm-holtz equation with perfectly
matched layer (PML), which is a second order scheme andpointwise
consistent with the equation. An error analysis is made between the
numericalwavenumber and the exact wavenumber, and a refined choice
strategy based on minimiz-ing the numerical dispersion is proposed
for choosing weight parameters. A full-coarseningmultigrid-based
preconditioned Bi-CGSTAB method is developed for solving the linear
sys-tem stemming from the Helmholtz equation with PML by the finite
difference scheme. Theshifted-Laplacian is extended to precondition
the 3D Helmholtz equation, and a spectralanalysis is given. The
discrete preconditioned system is solved by the Bi-CGSTAB
method,with a multigrid method used to invert the preconditioner
approximately. Full-coarseningmultigrid is employed, and a new
matrix-based prolongation operator is constructedaccordingly.
Numerical results are presented to demonstrate the efficiency of
both the
new 27-point finite difference scheme with refined parameters,
and the preconditionedBi-CGSTAB method with the 3D full-coarsening
multigrid.2012 Elsevier Inc. All rights reserved.
1. Introduction
The wave equation has numerous important applications in
sciences and engineering, for instance, in geophysics,
aero-nautics, marine technology. Applying the Fourier transform
with respect to time to the wave equation, we obtain the fre-quency
domain wave equation, which is the well-known Helmholtz equation.
The Helmholtz equation is so importantthat its numerical simulation
has stimulated significant research. To solve the Helmholtz
equation numerically, artificialboundary conditions are often
employed so that we can truncate the infinite computing domain into
a finite one. The per-fectly matched layer (PML, cf.[8,30,40])
proposed by Brenger is a popular artificial absorbing boundary
condition, which is
used to gradually damp the outgoing waves and eliminate boundary
reflections. For convenience, we call the Helmholtzequation with
PML the Helmholtz-PML equation, which is considered in this
paper.
To discretize the Helmholtz equation, we mainly have finite
difference methods (cf.[11,19,22,30,31,33,34,43]) and finiteelement
methods (cf.[2,3,10,13,16,20]). Finite difference methods are
commonly used in engineering field such as geophys-ics. In
scientific computing, solving the Helmholtz equation numerically
with high wavenumbers still remains as one of themost difficult
tasks. Due to the pollution effect of high wavenumbers, the
wavenumber of the numerical solution is different
0021-9991/$ - see front matter 2012 Elsevier Inc. All rights
reserved.http://dx.doi.org/10.1016/j.jcp.2012.07.048
q This research is partially supported by the Guangdong
Provincial Government of China through the Computational Science
Innovative Research Teamprogram. Corresponding author.
E-mail addresses:[email protected](Z.
Chen),[email protected](D. Cheng),[email protected](T. Wu).1
Supported in part by the Natural Science Foundation of China under
Grants 10771224 and 11071264.
Journal of Computational Physics 231 (2012) 81528175
Contents lists available atSciVerse ScienceDirect
Journal of Computational Physics
j o u r n a l h o m e p a g e : w w w . e l s e v i e r . c o m
/ l o c a te / j c p
http://dx.doi.org/10.1016/j.jcp.2012.07.048mailto:[email protected]:[email protected]:[email protected]://dx.doi.org/10.1016/j.jcp.2012.07.048http://www.sciencedirect.com/science/journal/00219991http://www.elsevier.com/locate/jcphttp://www.elsevier.com/locate/jcphttp://www.sciencedirect.com/science/journal/00219991http://dx.doi.org/10.1016/j.jcp.2012.07.048mailto:[email protected]:[email protected]:[email protected]://dx.doi.org/10.1016/j.jcp.2012.07.048
-
7/23/2019 A Dispersion Minimizing Finite Difference Scheme and
Precond - Chen Et Al - 2012
2/24
from the wavenumber of the exact solution, which is known as
numerical dispersion (cf.[20,21]). The conventional 2D5-point and
3D 7-point finite difference schemes lead to serious numerical
dispersion, polluting the numerical accuracy.To reduce the
numerical dispersion, some weighted transformed-based finite
difference schemes have been constructed(cf. [19,22,24,25,28,32]),
which need less grids per wavelength, while maintaining a
comparable accuracy. For the 3DHelmholtz equation, the weighted
transformed-based finite difference schemes are very complicated.
For instance, in[25], seven rotated coordinate systems were
employed to construct a 3D 27-point difference scheme.
In this paper, we shall propose an alternative finite difference
scheme for the 3D Helmholtz equation, which is an exten-sion of our
previous work for the 2D case in[11]. This new scheme remains
weighted, but is rotation-free. We call it a dis-persion minimizing
finite difference scheme, since the weight parameters are obtained
by minimizing the numericaldispersion. The dispersion minimizing
finite difference scheme is of second order and pointwise
consistent. Its constructionis much simple without rotating the
coordinate system in 3D space, compared with the staggered-grid
27-point formulation,which was originally proposed for the wave
equation in [24], and was further developed to the 3D Helmholtz
equation in[25]. Interestingly, we shall present that our scheme is
equivalent to the scheme in [25]under certain conditions.
Moreover,weight parameters of our scheme are chosen by refining
parameter intervals, which is called as the refined choice
strategy.We shall give an error analysis between the numerical
wavenumber and exact wavenumber, and numerical experimentsshow that
the new scheme with the refined strategy outperforms the
staggered-grid scheme in reducing the numericaldispersion.
For the Helmholtz equation, high-order finite difference schemes
(cf. [4,31,34]) are also constructed to improve thenumerical
accuracy. For instance, in [34], compact finite difference schemes
of sixth order are proposed for the 3D Helmholtzequation. These
sixth order schemes perform pretty well for small constant
wavenumbers. Theoretically, sixth orderschemes are more
competitive, so long as the step size is small enough. However,
grids per wavelength can not be too muchin practical, that is, the
step size can not be too small. Also, the pollution analysis of
error shows that the accuracy not onlydepends on the convergence
order, but also the wavenumber. Then, though the sixth order scheme
has a higher convergenceorder, it does not always means a higher
accuracy. For certain step size and large wavenumbers, the new
second orderscheme may compete with the sixth order scheme, since
it minimizes the numerical dispersion. In this paper, we shall
com-pare the new second order scheme with the 3D sixth order
compact scheme in[34], and numerical examples show that thenew
second order scheme performs better for certain step sizes and
large wavenumber. Moreover, we specially point outthat sixth order
schemes are more demanding, since they require the solution and
source term be continuously differentiableof sixth and fourth
order, respectively. They also require the wavenumber be constant
and the step sizes be equal in threedirections. However, these
requirements may not be met in practice. For example, in
geophysical applications, we have todeal with the Helmholtz
equation with varying wavenumbers in heterogeneous medium, and the
step size in the third direc-tion may differ from others. In
addition, high order schemes may have difficulties in dealing with
boundary conditions, and ahigh convergence order may not be
obtained if the boundary condition is not dealt properly.
After discretization of the Helmholtz equation, the
preconditioned Bi-CGSTAB method is employed to solve the
largeindefinite linear system, and the shifted-Laplacian
(cf.[14,15,23]) is considered as the preconditioner. The
shifted-Laplacianpreconditioner is an extension of the Laplacian
preconditioner, which was originally proposed in [5,6] for the 2D
case. In thispaper, for the 3D Helmholtz-PML equation, the
corresponding preconditioner we employ is the 3D complex
shifted-Lapla-cian-PML. We specially analyze the spectral
distribution of the linear system from the perspective of linear
fractal mappingin complex variable functions. We propose a new
prolongation operator for the 3D full-coarsening multigrid, which
is usedto invert the preconditioner approximately. With the same
number of iterations, it is expected that the full-coarsening
mul-tigrid shall consume less CPU time than the semi-coarsening
case, which decreases more gradually in grid size. Numericalresults
are presented to illustrate that the 3D full-coarsening multigrid
with the new prolongation operator gives a betterperformance,
reducing both the number of iterations and the total CPU time
needed for convergence. In the experiment,wavenumbers range from
constant in homogeneous medium to greatly varying ones in
heterogeneous medium. For the caseof constant wavenumber, the
dimensionless wavenumber (cf. [21]) we compute in our experiment is
as large as 220. Wespecially point out that the number of
iterations scales roughly linearly with the wavenumber, which seems
to be a classicalproblem for iterative solutions of the Helmholtz
equation. We have not solved this problem.
In this paper, we aims at solving the 3D Helmholtz-PML equation
related with geophysical applications, and focuses onboth the
discretization of the operator equation and iterative method of the
discrete linear system. The remainder of thispaper is organized as
follows. In Section2, a new 27-point finite difference scheme is
developed and analyzed. In Section3,an error analysis is presented
between the numerical wavenumber and exact wavenumber. In Section
4, a refined choicestrategy is given to choose weighted parameters
of the new scheme. In Section5, we discuss the 3D complex
shifted-Laplacian preconditioning, and make some spectral analysis.
In Section6, we propose a new prolongation operator for
thefull-coarsening multigrid. In Section7, some numerical
experiments are presented. Finally, in Section 8, some
conclusionsare drawn.
2. A consistent 27-point finite difference scheme for the 3D
Helmholtz-PML equation
In this section, we formulate a new 27-point finite difference
scheme for the 3D Helmholtz-PML equation, based on theidea of
weighted average (cf. [30]). This scheme is pointwise consistent
with the equation and of second order. Compared
Z. Chen et al. / Journal of Computational Physics 231 (2012)
81528175 8153
http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-
-
7/23/2019 A Dispersion Minimizing Finite Difference Scheme and
Precond - Chen Et Al - 2012
3/24
with methods in[24,25], the construction of this scheme is much
simpler and can be easily extended to nonuniform grids,since it
neither needs the first-order hyperbolic system nor the rotated
Cartesian coordinate system.
We consider the 3D Helmholtz equation for wave problems
Au: Du 1 aik2u g in R3; 2:1
where D: @2@x2
@2@y2
@2@z2
is the 3D Laplacian, unknown u usually represents a pressure
field in the frequency domain,
k:
2pf=vis the wavenumber withf indicating the frequency in Hertz
and vindicating the wave velocity,ais the real num-
ber indicating the fraction of damping in the medium,
iffiffiffiffiffiffiffi1p is the imaginary unit, andgrepresents the
source term. The
wavenumber k, which depends explicitly on the spatial velocity
v, is a constant for the homogeneous medium and a variablefor the
heterogeneous medium. The medium is considered to be barely
attenuative when 0 6 a1, andacan be set up to5% (i:e:;a0:05 in
geophysical applications. When a square domain of size His
normalized to a unit domain, we obtain thedimensionless wavenumber
which equals to 2pfH=v (cf.[21]). In the remainder, the wavenumber
refers to the dimension-less wavenumber.
Applying the PML technique to truncate the infinite domain
in(2.1)into a bounded domain, we have the 3D Helmholtz-PML
equation
Au: @
@x A
@u
@x
@
@y B
@u
@y
@
@z C
@u
@z
1 aiDu g; 2:2
with
A:nyynzznxx
; B:nxxnzznyy
;
C :nxxnyy
nzz ; D:nxxnyynzzk
2x;y;z:
Here, nxx; nyyand nzzare 1D damping functions that satisfy nxx
1; nyy 1, nzz 1 in the interior area.We next introduce the
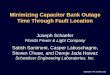
construction of the new 27-point finite difference scheme. Firstly,
we present the 27-point finite
difference stencil with numbering in Fig. 1, where0;0;0
represents the center point in the stencil, andl;m; n withl;m; n2
f1;0;1g denote the points surrounding 0;0;0. For convenience, 0;0;0
and l; m; n are identified withx0;y0;z0 andx0 lh;y0 mh;z0 nh
respectively, where h is the discretization step. The
discretization of a functionuat pointl; m;n is denoted by u l;m;n
:ux0 lh;y0 mh;z0 nh. Then, to approximate @@x A @u@x
, @@y
B @u@y
and @
@z C@u
@z
, we
utilize
Lh;xu:c1Lh;xuj 0;0;0 c24 Lh;xuj 0;1;0 Lh;xuj 0;1;0 Lh;xuj 0;0;1
Lh;xuj 0;0;1 h i
c34
Lh;xuj 0;1;1 Lh;xuj 0;1;1 Lh;xuj 0;1;1 Lh;xuj 0;1;1
h i; 2:3
y z
x
(0,1,0)
(0,0,0)
(0,0,1)
(0,0,1)
(0,1,0)
(1,0,0)
(1,0,0)
Fig. 1. The 27-point finite difference stencil with
numbering.
8154 Z. Chen et al. / Journal of Computational Physics 231
(2012) 81528175
-
7/23/2019 A Dispersion Minimizing Finite Difference Scheme and
Precond - Chen Et Al - 2012
4/24
Lh;yu:c1Lh;yuj 0;0;0 c24
Lh;yuj 0;0;1 Lh;yuj 0;0;1 Lh;yuj 1;0;0 Lh;yuj 1;0;0
h i
c34
Lh;yuj 1;0;1 Lh;yuj 1;0;1 Lh;yuj 1;0;1 Lh;yuj 1;0;1
h i; 2:4
Lh;zu:c1Lh;zuj 0;0;0 c24
Lh;zuj 1;0;0 Lh;zuj 1;0;0 Lh;zuj 0;1;0 Lh;zuj 0;1;0
h i
c3
4 Lh;zu
j 1;1;0 Lh;zu
j 1;1;0 Lh;zu
j 1;1;0 Lh;zu
j 1;1;0 h i;
2:5
whereLh;xuj 0;m;n ;Lh;yuj l;0;n andLh;zuj l;m;0 (l;m; n2
f1;0;1g) are approximations of @@x A @u@x
; @@y B@u@y
and @@z C
@u@z
respec-
tively, based on the second order centered difference, and
parameters satisfy c1 c2c31. The differential operatorL: @
@x A @@x @
@y B @@y
@
@z C @@z
is then approximated byLh,
Lhu: Lh;xu Lh;yu Lh;zu: 2:6
Finally, the zeroth order term Du is approximated by a weighted
average
IhDu:w1D0;0;0u0;0;0w2Ih;1Du w3Ih;2Du w4Ih;3 Du ; 2:7
with parameterswjj1;2;3;4satisfyingP4
j1wj1. Here,Ih is an average operator, and
operatorsIh;1;Ih;2andIh;3 aredefined by
Ih;1Du: 16
D1;0;0u1;0;0D0;1;0u0;1;0D0;0;1u0;0;1D1;0;0u1;0;0D0;1;0u0;1;0D0;0;1u0;0;1
;
Ih;2Du: 1
12
D1;1;0u1;1;0D0;1;1u0;1;1D1;0;1u1;0;1D1;1;0u1;1;0D0;1;1u0;1;1D1;0;1u1;0;1
D1;1;0u1;1;0D0;1;1u0;1;1D1;0;1u1;0;1D1;1;0u1;1;0D0;1;1u0;1;1D1;0;1u1;0;1;
and
Ih;3Du:1
8
D1;1;1u1;1;1D1;1;1u1;1;1D1;1;1u1;1;1D1;1;1u1;1;1D1;1;1u1;1;1D1;1;1u1;1;1
D1;1;1u1;1;1D1;1;1u1;1;1:
With
Lh and
Ih , we obtain a new 27-point finite difference scheme for the
3D Helmholtz-PML Eq.(2.2):
Lhu 1 aiIh Du g0;0;0: 2:8
To analyze the consistency of the new 27-point scheme, we recall
the notion for pointwise consistency[38].
Definition 2.1. Suppose that the partial differential equation
under consideration isTugand the corresponding finitedifference
approximation is Tl;m;nUl;m;nGl;m;n where Gl;m;n denotes whatever
approximation which has been made of thesource term g. Letxl;ym;zn
: x0 lDx;y0 mDy;z0 nDz. The finite difference scheme
Tl;m;nUl;m;nGl;m;n is pointwiseconsistent with the partial
differential equationTugatx;y;zif for any smooth function
//x;y;z,
T/gjxxl;yym ;zzn Tl;m;n/xl;ym;zn Gl;m;n
! 0 2:9
as Dx;Dy;Dz!0.For the difference approximation(2.8)of the 3D
Helmholtz-PML Eq.(2.2), we have the following proposition.
Proposition 2.2. The 27-point finite difference scheme(2.8)is
pointwise consistent with the 3D Helmholtz-PML Eq.(2.2).
Proof. Assume thatxl 6 x< xl1; ym 6 y< ym1andzn 6 z<
zn1. We recall thatP3
j1cj1 andP4
j1wj1. Then, it followsfrom(2.3)(2.5)and the Taylor theorem
that
Lh;xu @
@x A
@u
@x
l1h
2 Oh
3; 2:10
Lh;yu @
@y B
@u
@y
l2h
2 Oh
3; 2:11
Lh;zu @
@z C
@u
@z l3h2
Oh3
; 2:12
Z. Chen et al. / Journal of Computational Physics 231 (2012)
81528175 8155
-
7/23/2019 A Dispersion Minimizing Finite Difference Scheme and
Precond - Chen Et Al - 2012
5/24
in which
l1 : 1
24
@3
@x3 A
@u
@x
@
@x A
@3u
@x3
!" #c24
@3
@y2@x A
@u
@x
@3
@z2@x A
@u
@x
" #
c34
@
@y
@
@z
2@
@x A
@u
@x
@
@y
@
@z
2@
@x A
@u
@x
" #;
l2 : 1
24
@3
@y3 B
@u
@y
@
@y B
@3u
@y3
!" #c24
@3
@x2@y B
@u
@y
@3
@z2@y B
@u
@y
" #
c34
@
@x
@
@z
2@
@y B
@u
@y
@
@x
@
@z
2@
@y B
@u
@y
" #;
and
l3 : 1
24
@3
@z3 C
@u
@z
@
@z C
@3u
@z3
!" #c24
@3
@x2@z C
@u
@z
@3
@y2@z C
@u
@z
" #
c34
@
@x
@
@y
2@
@z C
@u
@z
@
@x
@
@y
2@
@z C
@u
@z
" #:
Similarly, following(2.7)and the Taylor theorem, we obtain
that
IhDu Du l4h2
Oh3
; 2:13
where
l4 : w26
w33
@2@x2
@
2
@y2
@2
@z2
!Du
w48
@
@x
@
@y
@
@z
2
@
@x
@
@y
@
@z
2
@
@x
@
@y
@
@z
2
@
@x
@
@y
@
@z
2" #Du:
It follows from Eqs.(2.10)(2.13)that the left hand side of the
27-point finite difference approximation (2.8)is equivalent to
@
@x A@u
@x
@
@y B@u
@y
@
@z C@u
@z
1 aiDuhh2h2 Oh3; 2:14
where hh2 :P4
j1lj. Because ofR3
j1cj1; R4j1xj1, and Definition2.1, we come to our conclusion.
The scheme is justsecond-order accurate. h
The next proposition indicates the relationship between the new
27-point finite difference scheme (2.8)and the stag-gered-grid
27-point finite difference scheme proposed in[24,25].
Proposition 2.3. For the case of the wavenumber being a
constant, the staggered-grid 27-point finite difference scheme
andthe 27-point finite difference scheme(2.8)are equivalent
ifwjwmjj1;2; 3;4, and
c1 cs12
3cs2
1
2cs3; c2
1
3cs2; c3
1
2cs3;
wherewmjj1;2;3;4andcsjj1;2;3are parameters in the staggered-grid
27-point finite difference scheme.
Proof. For convenience, we firstly introduce the notations
R0 :u0;0;0;
R1 :u1;0;0u0;1;0u0;0;1u1;0;0u0;1;0u0;0;1;
R2
:u1;1;0u0;1;1u1;0;1u1;1;0u0;1;1u1;0;1u1;1;0u0;1;1u1;0;1u1;1;0u0;1;1u1;0;1;
and
R3 :u1;1;1u1;1;1u1;1;1u1;1;1u1;1;1u1;1;1u1;1;1u1;1;1:
When the wavenumber is a constant, the staggered-grid 27-point
scheme in[25]reduces to
8156 Z. Chen et al. / Journal of Computational Physics 231
(2012) 81528175
-
7/23/2019 A Dispersion Minimizing Finite Difference Scheme and
Precond - Chen Et Al - 2012
6/24
cs1h2 R1 6R0
cs23h
2
1
2R2 R1 12R0
cs34h
2
3
2R3 R2 2R1 12R0
1 aik2 wm1R0wm26 R1
wm312
R2wm48 R3
g0;0;0;
whereP4
j1wmj1 andP3
j1csj 1. For the details of the scheme, we refer readers to the
derivation of the Eq. (6) in[25]. Forour proposed 27-point finite
difference scheme, the formula(2.8)reduces to
c1h2 R1 6R0 c2
h2 12
R2 R1
c3h2 34
R3 12R2
1 aik2 w1R0w2
6 R1w3
12R2w4
8 R3
g0;0;0: 2:16
For Eqs.(2.15)and(2.16), comparing parameters ofR0, R1;R2 and R3
yields the conclusion of this proposition. h
3. Error analysis between the numerical wavenumber and the exact
wavenumber
In this section, a classical dispersion analysis is made to
assess the accuracy of the new scheme(2.8), and a theoreticalresult
is given on the approximation of numerical wavenumber to the exact
wavenumber when kh is small enough.
To do a dispersion analysis for the new scheme(2.8), we consider
an infinite homogeneous model with constant velocityv, and we also
assume that the medium has no damping effect on the waves, that
is,a0 for the Eq.(2.1). Thus, we obtainthe Eq. (2.16) with a0. Let
k be the wavelength, and G: khbe the number of gridpoints per
wavelength. Since k vfand thewavenumber k:
2pf
v, we have kh
2p
G
. Following the classical harmonic approach, we firstly insert
the discrete expression of
a plane waveu lmneihk l cos/ coshm cos/ sinhn sin/ in(2.16),
where p2 /is the propagation angle from the z-axis, and h is
thepropagation angle from thex-axis. Let
a :kh cos/ cos h2pG cos/ cos h; b:kh cos/ sin h
2pG cos/ sin h; c:kh sin/
2pG sin/:
By a simple computation, we have the dispersion equation
k2h2L M; 3:1
in which
L :w1w23 H
w33 Fw4E;
M:2c13 H c2 HF c3 F 3E ;
with E:cos a cosb cos c; F :cos a cos b cosa cosc cosb cosc, and
H:cos a cosb cosc:. Then, replacing k in the leftside of the
Eq.(3.1)with the numerical wavenumber kN yields
kN
1
h
ffiffiffiffiffiM
L
r : 3:2
The next proposition presents the error between the numerical
wavenumber kN and the exact wavenumberk.
Proposition 3.1. For the 27-point finite difference
scheme(2.8)witha0, there holds
kN
k 1
24 c1 c2 8c3 b1
4 b24 b3
4h i
1
4 c3 c2 b1b2
2 b1b32 b2b3
2h i
3
8
c3 1
12
w21
6
w31
4
w4k3h2 Ok4h3; kh! 0; 3:3where b1 :cos/ cosh; b2 :cos/ sinh, and
b3 :sin/.
Proof. Let s:kh. Then, ab1s; bb2s; cb3s; Es cos a cos b cos c;
Fs cos a cosb cosa cosc cosb cosc, andHs cos a cosb cosc. Moreover,
bothMandL depend on the variables, denoted byMsandLsrespectively.
Withthe Taylor expansion, we have
Ms s2 1
12 c1 c2 8c3 b1
4 b24 b3
4h i
6 c2 c3 b1b22 b1b3
2 b2b32
h i 9c3
n os4 Os5;
3:4
and
1
Ls 1 1
6 w2 2w3 6w4 s2
Os3
: 3:5
Z. Chen et al. / Journal of Computational Physics 231 (2012)
81528175 8157
-
7/23/2019 A Dispersion Minimizing Finite Difference Scheme and
Precond - Chen Et Al - 2012
7/24
In addition, from the Eq.(3.2), we have
kNh
2MsLs
:
Together with Eqs.(3.4) and (3.5), we have
kN
2
k2
1
12 c1 c2 8c3 b1
4 b24 b3
4
h i1
2 c3 c2 b1b2
2 b1b32 b2b3
2
h i34c3
16w2
13w3
12w4
k4h2
Ok5h3
; kh! 0:
Based on the above equation, applying the Taylor expansion of
the function ffiffiffiffiffiffiffiffiffiffiffiffi
1 sp at the point s0 yields the conclusion ofthis proposition.
h
We remark that the above proposition indicates thatkN
approximates kin a second order. Moreover, the term associatedwith
k3h2 presents the pollution effect, which depends on the wavenumber
k, the parameters of the finite difference formula(2.8)and the
waves propagation angle defined by / and h.
4. A refined parameter choice strategy for the new 27-point
finite difference scheme
In this section, a refined strategy is presented to choose
optimal parameters for the new scheme (2.8), based on minimiz-
ing the numerical dispersion. An optimization problem is solved
with a finer setting to estimate the weight coefficientsc1;c2;c3,
andw1; w2; w3; w4.
As is known, normalized numerical phase velocity and group
velocity are two important tools in measuring the
numericaldispersion, and the former is usually preferred in
practice (see[22,25,29,39]). For the Eq.(2.16)witha0, its
normalizednumerical phase and group velocity are
VNphv
G
2p
ffiffiffiffiffiM
L
r ; 4:1
and
VNgrv
G
4pv
VNph
1h
@M@k
LM 1
h@L@k
L2
; 4:2
respectively. Withh2pGk, we can easily conclude that
kN
k
VNphv
G
2p
ffiffiffiffiffiM
L
r ; 4:3
which means minimizing the error between the numerical
wavenumber kN and the wavenumber kis equivalent to minimiz-ing the
normalized phase velocity.
Now, we choose optimal parameterscjj1;2;3andwjj1;2;3;4 by
minimizing the numerical dispersion. To thisend, we set
Jc1;. . .;c3;w1;. . .;w4;G;/; h: G
2p
ffiffiffiffiffiM
L
r 1; 4:4
withP3
j1cj1;P4
j1wj1 andG;/; h 2IG I/ Ih. Here, IG; I/ and Ih are three
intervals. In general, one can chooseI/ :
0; p2
; Ih :
0; p4
and IG :
Gmin; Gmax
4;400
with GminP 2 by the Nyquist sampling limit[29]. It is observed
from
(4.3)that minimizing the error between the numerical wavenumber
kN and the exact wavenumber k is equivalent to min-imizing the
normkJc1; . . . ; c3; w1; . . . ; w4; ; ; k1;IGI/Ih . For this
purpose, letting Jc1; . . . ;c3; w1; . . . ;w4; G;/; h 0 yields
c1 2G2 3 3EFH
h i c2 2G
2 3E 2FH h i
w1 4p2E 1
w2 4p2 E1
3H
w3 4p2 E
1
3F
4p2E 2G2 3EF : 4:5
We choose
1
G
1
Gl0:
1
Gmax l
0 1
1Gmin
1Gmax
l 1 2
1
Gmax; 1
Gmin
for l
01;2;. . .; l;
/ /
0
m :
m0 1p
2m 1 2I/ for m
0
1;2;. . .;m;
8158 Z. Chen et al. / Journal of Computational Physics 231
(2012) 81528175
-
7/23/2019 A Dispersion Minimizing Finite Difference Scheme and
Precond - Chen Et Al - 2012
8/24
and
h hn0 :n0 1p4n 1
2Ih for n0 1; 2;. . .;n:
Letal0 ;m0 ;n0 : 2pGl0
cos/m0coshn0 ; bl0 ;m0 ;n0 : 2pGl0
cos/m0sinhn0 , andcl0 ;m0 : 2pGl0
sin/m0 . Then, from(4.5), we obtain a overdeterminedlinear
system
S11;1;1 S21;1;1 S
31;1;1 S
41;1;1 S
51;1;1
..
. ... ..
. ... ..
.
S11;1;n S21;1;n S
31;1;n S
41;1;n S
51;1;n
S11;2;1 S21;2;1 S
31;2;1 S
41;2;1 S
51;2;1
..
. ... ..
. ... ..
.
S1l0 ;m0;n0 S2l0;m0 ;n0 S
3l0 ;m0;n0 S
4l0;m0 ;n0 S
5l0 ;m0;n0
..
. ... ..
. ... ..
.
S1l;m;n S2l;m;n S
3l;m;n S
4l;m;n S
5l;m;n
26666666666666666664
37777777777777777775
c1c2w1
w2
w3
26666664
37777775
S61;1;1
..
.
S61;1;n
S61;2;1
..
.
S6l0 ;m0;n0
..
.
S6l;m;n
26666666666666666664
37777777777777777775
; 4:6
where
S1l0 ;m0;n0 :2G
2l0 3 3El0 ;m0 ;n0 Fl0;m0;n0 Hl0;m0;n0
;
S2l0 ;m0;n0 :2G2l0 3El0;m0 ;n0 2Fl0;m0 ;n0 Hl0 ;m0;n0
;
S3l0m0;n0 :4p2El0 ;m0 ;n0 1;
S4l0 ;m0;n0 :4p2 El0;m0;n0
1
3Hl0 ;m0;n0
;
S5l0 ;m0;n0 :4p2 El0;m0;n0
1
3Fl0 ;m0;n0
;
S6l0 ;m0;n0 :4p2El0 ;m0;n0 2G
2l0 3El0;m0;n0 Fl0 ;m0 ;n0
;
El0;m0;n0 :cos al0 ;m0 ;n0cos bl0;m0 ;n0cos cl0;m0;
Fl0;m0 ;n0 :cos al0 ;m0;n0cos bl0;m0 ;n0 cosal0;m0;n0cos cl0;m0
cosbl0;m0;n0cos cl0 ;m0
Hl0 ;m0;n0 :cos al0;m0;n0 cosbl0;m0 ;n0 cos cl0 ;m0:The above
coefficient matrix has l m nrows and 5 columns, and can be solved
by the least-squares method. In [25],
optimal parameters were chosen globally, and were used in the
computation for different frequencies, velocity and stepsizes. This
may yield much numerical dispersion for large wavenumbers and
varying kx;y;z. To reduce the numerical dis-persion and improve the
accuracy of the difference scheme, we propose the following rule
with a finer setting.
Rule 4.1 (Refined choice strategy). Step 1.Estimate the
intervalIG : Gmin; Gmax .
Step 2.Choosecii2N3andwjj2N4such that
c1;. . .;c3;w1;. . .;w4 argmin kJc1;. . .;c3;w1;. . .;w4; ;
k1;IGI/Ih :X3j1 cj 1;
X4j1wj 1
( ): 4:7
Dispersion reducing schemes have been discussed since the 1990s,
and they can be found in the work of Tam and his col-laborators
(cf.[3537]). Now, we shall present some relation between Tams work
and ours. Both of the work are based onthe dispersion relation of
the waves, that is, a functional relation between the angular
frequency of the waves and the wave-numbers of the spatial
variables. This relation is usually obtained by taking the space
and time Fourier transforms of the gov-erning equations, and it
determines all the dispersiveness, damping rate, isotropy or
anisotropy, group and phase velocitiesof waves. Therefore, both the
work of Tam and ours are based on the fact that a good finite
difference scheme should have thesame or almost the same dispersion
relation as the original equations. However, there are also some
difference. Firstly, weconcentrate on solving the acoustic wave
equation in the frequency domain, that is the Helmholtz equation,
which possessessome different properties compared with the acoustic
wave equation in the time domain. Tam and his collaborators focus
onthe acoustic problems in the time domain, especially the
linearized Euler equations. Secondly, we take a different
dispersionminimizing strategy. For our finite difference scheme, we
respectively compute the numerical dispersion Eq. (3.1)and
thenormalized numerical phase velocity (4.1), which have seven
weight parameters to be determined. As is known, the normal-ized
numerical phase velocity would be 1, if there is no numerical
dispersion. Then, we could obtain the weight parameters
Z. Chen et al. / Journal of Computational Physics 231 (2012)
81528175 8159
-
7/23/2019 A Dispersion Minimizing Finite Difference Scheme and
Precond - Chen Et Al - 2012
9/24
by minimizing the error between the normalized numerical phase
velocity and 1. For the method of Tam and his collabora-tors, they
try to formulate a finite difference scheme nearly having the same
Fourier transform in space or time as the ori-ginal partial
derivatives. The finite difference approximation of the spatial
derivatives and the treatment for the timederivative were discussed
separately. For details, we refer the reader to[37].
We now turn our attention to computing the weight parameters
with Rule 4.7. In general, we can estimate IGby
usingaprioriinformation before computing parameters. For constant
wavenumbers, the number of grids per wavelength Gusuallylocates in
2;400, which can be partitioned into some small intervals for
practical computing, such asIG :
2;2:5
;2:5;3
; . . .
10;400
. For varying wavenumbers, the velocity v locates in
vmin;vmax
, where vmin; vmax denote
the minimum and maximum velocity respectively. For each
frequency f, we can obtain the interval IG Gmin; Gmax withGmin
vminfh andGmax vmaxfh . Then, for each intervalIG, together withI/
: 0; p2andIh : 0; p4, we can obtain a group of param-eters. In
computation, we need to solve a overdetermined linear system (4.6),
whose size l m n 5 is related with thepartition ofIG; I/, and Ih.
Generally, we would obtain better parameters with a finer
partition, which means a more expensivecost. Fortunately, we do not
need a very fine partition, since the benefit increases little with
the increasing finer partition. Inpractice, we choose l20; m20;
n10, and the resulting system can be solved not expensively.
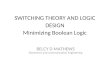
Table 1 gives a group of refined parameters. In Fig. 2(a)(c), we
present the normalized phase velocity curves for the
stag-gered-grid scheme with global choice strategy (the
staggered-grid 27p), the new scheme with global choice strategy
(theglobal 27p), and the new scheme with refined parameters (the
refined 27p) inTable 1, respectively. As can be seen, boththe
global 27p and the refined 27p scheme have an improvement over the
staggered-grid 27p scheme, and the refined27p scheme has the least
numerical dispersion. Therefore, we would expect that the refined
27p scheme can be used to con-trol the numerical dispersion and to
suppress nonphysical oscillations to a certain degree.
Numerically, the dispersion is not sensitive to the small change
of the weight parameters. That is, the dispersion wouldnot have a
big change if the parameters are disturbed a little. To see this,
we present two dispersion pictures in Fig. 2(d) and(e), in which
the parameters are taken from (c) but with perturbations of 0.1 and
0.01, respectively. As can be observed, for asmall change of
parameters, the normalized phase velocity curve in (d) is almost
the same as that of the original. However, ifparameters are
disturbed too much, the normalized phase velocity curve would
change significantly. We also point out that asmall perturbation of
the parameters would not have great influences on the performance
of the difference scheme. We shallpresent this by examples in
Section7.1.
5. A 3D complex shifted-Laplacian-PML preconditioner for the 3D
Helmholtz-PML equation
In this section, the complex shifted-Laplacian-PML
preconditioner is developed for the 3D Helmholtz-PML equation, and
aspectral analysis is given to the discrete preconditioned system
from the perspective of linear fractal mapping on complexplane.
After discretization of the 3D Helmholtz-PML equation, we would
like to solve the resulting linear system with iterativesolvers,
since direct methods are limited by the storage. For the iterative
method, Krylov subspace methods, such as the Bi-CGSTAB[41]and
GMRES[27], are usually preferred. However, due to the
indefiniteness and bad condition number of theresulting system, the
Krylov subspace method is not competitive, and preconditioning is
required. That is, a good precondi-tioner should be constructed to
make the preconditioned system have a favorable spectral
distribution, which contributes toa lower condition number and
hence a fast convergence of the iterative method (cf.[7]).
Many preconditioned iterative solvers for the Helmholtz equation
have been explored in the past few decades. In Baylisset
al.[5],established a benchmark for the iterative solution of the
Helmholtz equation. They proposed an iterative algorithmby using
the preconditioner of Laplacian, combined with the conjugate
gradient (CG) iteration. Since the Helmholtz problemwas indefinite
and non-self-adjoint, the preconditioned CG iteration was applied
to the normal equation which is symmetricand positive definite. The
preconditioner was inverted approximately with one SSOR sweep. In
[6,18], an even greaterimprovement was obtained when a multigrid
sweep, plus a redblack ordering was employed to invert
approximatelythe preconditioner. Later, a family of
shifted-Laplacian preconditioners [14,15,23]were developed, which
performed effi-ciently, especially the complex shifted-Laplacian
preconditioner (cf.[14])
Table 1
Refined optimal parameters.
IG [2, 2.5] [3.5, 4] [5,6] [7, 8] [9, 10] [10,400]
c1 0.5035127 0.7617528 0.8159342 0.8354262 0.8432810 0.8269996c2
0.0720630 0.0148152 0.0340791 -0.0394517 0.0414069 4.097e07c3
0.4244243 0.2530624 0.2181449 0.2040255 0.1981258 0.1729999w1
0.4058413 0.7602512 1.1330134 1.7177071 2.4693294 2.9473150w2
0.1966284 0.4883334 1.5191327 3.2400262 5.4811311 6.8805122w3
0.5979158 1.1153920 2.1033335 3.8084643 6.0429826 7.4116566w4
0.2003855 0.3873097 0.7172142 1.2861453 2.0311809 2.4784594
8160 Z. Chen et al. / Journal of Computational Physics 231
(2012) 81528175
http://-/?-http://-/?-
-
7/23/2019 A Dispersion Minimizing Finite Difference Scheme and
Precond - Chen Et Al - 2012
10/24
M: D b1b2ik2; 5:1
whereb1andb2are positive parameters. In[14,15,23], the multigrid
sweep was also employed to invert the preconditionerapproximately.
As can be seen, the shifted-Laplacian preconditioner is a
generalization of the original Laplacian precondi-tioner proposed
in[5]. It can be obtained by adding a zeroth order term to the
Laplacian. For the preconditioning systemof shifted-Laplacian
preconditioner, the preconditioned Krylov subspace method such as
Bi-CGSTAB is employed, and is di-rectly applied to the discrete
Helmholtz equation. However, for that of Laplacian preconditioner
[5,6,18], they used the pre-
conditioned CG iteration, which was applied to the normal
equation instead.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.40.85
0.9
0.95
1
1.05
1.1
Vph
N
/v
1/G
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.40.85
0.9
0.95
1
1.05
1.1
1/G
VN p
h/v
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.40.85
0.9
0.95
1
1.05
1.1
1/G
VN p
h/v
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.40.85
0.9
0.95
1
1.05
1.1
1/G
VN p
h/v
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.40.85
0.9
0.95
1
1.05
1.1
1/G
VN p
h/v
Fig. 2. Normalized phase velocity curves for: (a) the
staggered-grid 27p scheme, (b) the global 27p scheme, (c) the
refined 27p scheme, (d) the refined 27pscheme with parameters in
(c) disturbed by 0.01. (e) the refined 27p scheme with parameters
in (c) disturbed by 0.1.
Z. Chen et al. / Journal of Computational Physics 231 (2012)
81528175 8161
-
7/23/2019 A Dispersion Minimizing Finite Difference Scheme and
Precond - Chen Et Al - 2012
11/24
In this paper, for the 3D Helmholtz-PML Eq.(2.2), we base our
preconditioner on the operator
M: @
@x A
@u
@x
@
@y B
@u
@y
@
@z C
@u
@z
b1b2iD: 5:2
Ifb1; b2 > 0, we call the operator(5.2)as the 3D complex
shifted-Laplacian-PML preconditioner. When ABC1 andDk2,(5.2)is
equivalent to the operator(5.1). The 3D complex
shifted-Laplacian-PML preconditioner gives a nice
clusteredspectrum, which will be presented later. We employ (5.2)
to precondition the 3D Helmholtz-PML Eq. (2.2), obtaining the
pre-
conditioned equation in the operator form
AM1vg; v Mu: 5:3
We now pay attention to the discretization of(5.3), and the
spectral analysis of the discrete preconditioned system.
Applyingthe new 27-point finite difference scheme(2.8)to
discretize(5.3), we obtain the discrete preconditioned system
AM1
v g; v Mu; 5:4
whereA; M2CNN; u;g2 CN;C is the complex number set and Nis the
number of unknowns. MatricesAand Mare the dis-crete Helmholtz-PML
operator and preconditioner respectively, and they have the
forms
A:Lz1D; z1 :1 ai; 5:5
and
M:Lz2D; z2 :b1 b2i; 5:6
whereL;Dare discretizations of the 3D Laplacian-PML @@x A @@x
@@y B @@y @@zC @@z, and the operator corresponding to thezeroth
order term, respectively. The coefficient matrix A is sparse and
diagonal-distributional. Moreover, due to the PML,Ais nearly
symmetric with complex entries. As is observed, preconditioner Mcan
be constructed easily, just by discretizingM with the same
difference scheme forA. The inverse ofM can be approximated by the
multigrid method. The convergenceof the multigrid method is related
to parameters b1 and b2 (especially b2), which also have an
important influence on thespectral distribution of the
preconditioned system(5.4). It follows from the spectral analysis
later that the choice ofb2 isto strike a balance between the
convergence rate of the multigrid method and a favorable spectrum
of the preconditionedsystem(5.4).
We now study the spectrum of the discrete preconditioned 3D
Helmholtz-PML Eq.(5.4). For the 2D Helmholtz equation,an analysis
was given to the discrete preconditioned system in [17], with the
Neumann, Dirichlet, and Sommerfeld boundarycondition. For the 2D
Helmholtz-PML equation preconditioned with a 2D complex
shifted-Laplacian-PML, we presented a
spectral analysis from the perspective of the linear fractional
mapping on extended complex plane (see[12]). The spectralbehavior
can be understood clearly in this manner. Hence, we continue our
method proposed in [12] for the spectral analysisof(5.4). To do
this, we denote the eigenvalues ofA byrAfor any matrixA2 CNN. We
first recall a lemma in[12].
Lemma 5.1. LetL;D2CNN,A :Lz1DandM :Lz2Dwithz1;z22 C. IfD andM
are nonsingular,l2 Candk : lz1lz2withl z2 then k2rAM1if and only
ifl2rD1L, andM1A;D1Lshare the same eigenvectors.
With the help of above lemma, we can define a linear fractional
mapping by
k kl:l z1l z2
: 5:7
Denote the real and imaginary part oflby Rel and Iml
respectively. Then, relevant to(5.7), we have the following lem-ma,
which is a generalization of Lemma 2.2 in [12].
Lemma 5.2. Let the linear fractional mappingk: C ! C be defined
by (5.7). Then the linel lciwith c2R is mapped tothe circleOc;
Rwith c:z1z2icz2z2icandR :
z1z2z2z2ic
, and the half-planesl l> ciandl l< ciare mapped inside
andoutside Oc; R, respectively.
Proof. In the complex plane C fl: lx yi; x;y2Rg, a circle can be
represented by
ax2 y2 bxcyd 0; 5:8
with parameters a; b; c;d2R satisfying aP 0 and b2 c2 >4ad.
The center of this circle is b2a ; c2a and the radius isR:
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffib2c24ad
p2a . Noting that
x
l l
2 ; y
l l
2i ; and x2
y2
ll;
8162 Z. Chen et al. / Journal of Computational Physics 231
(2012) 81528175
-
7/23/2019 A Dispersion Minimizing Finite Difference Scheme and
Precond - Chen Et Al - 2012
12/24
(5.8)can be rewritten as
all fl fl d 0; 5:9
with f: 12 b ci; jfj2 >ad. The center and the radius can be
represented by c fa andRffiffiffiffiffiffiffiffiffiffiffijfj2ad
pa
respectively. Whena0,(5.9)is reduced to a line which can be
considered as a circle with R 1on the complex plane. Now, we
considerthe line
l lci; 5:10
which is parallel to the real axis. From(5.7), we have
lz2kz1k 1
; and lz2k z1
k 1 : 5:11
Substitution of(5.11)into(5.10)yields
a0kkf0k f0kd0
0; 5:12
wherea0 : z2 z2i c; f0 : z2z1i candd0 : z1 z1i c.
Then,(5.12)represents a circle, denoted by Oc;Rwiththe center c:
f0
a0z2z1ic
z2z2icand the radiusR
:ffiffiffiffiffiffiffiffiffiffiffiffiffiffijf0 j2a0d0
pa0 z1z2z2z2ic
. It can be easily obtained thatl l> ciis mapped in-
sideOc; R, andl l< ciis mapped outside Oc; R. h
The following proposition immediately follows the linear
fractional mapping(5.7)and the Lemma5.2.
Proposition 5.3. Letz1 :1 ai,z2 :1 bi(i.e., b11; b2bin (5.6))
with b> aP 0. Then the linel lciis mappedto the circle Oc; R
with c: abc2bc andR: bac2bc, the half-plane l l> ci is mapped
inside Oc;R, and the half-planel l< ciis mapped outside Oc; R.
Moreover, for the discrete preconditioned system(5.4)and a
constantr2 0;1, thereexists a positive constant b0such that
whena< b 6 b0the spectrum forD
1Lis mapped inside the circle O1; r, that is, foranyl2rD1L; jkl
1j 6 r.
Proof. The first result of this proposition follows from the
Lemma 5.2 withz1 :1 ai,z2 :1 bi, namely,b11; b2b in(5.6). The
second result follows from lim
b!ak1. h
We next give an example to illustrate the above proposition
explicitly. Fig. 3presents the linear fractional mapping(5.7)
with z1 :1a0andz2 :1 0:5ib0:5. As can be seen, lines l0 : l l0
(plotted in red), l1 : l l0:2i(green)andl2 : l l 0:2i(blue) are
mapped into circles l00 : O12 ; 12(red),l
01 : O 914 ; 514(green) andl
02 : O38 ; 58(blue), respectively.
The linel0 is the real axis and its image l00 is tangent to the
imaginary axis. The upper half-plane (the shadow region) and
the lower half-plane (white region) are mapped inside and
outside of the circle l00 respectively. The points l1 1,l20:5; l31;
l41:5 inFig. 3(a) are mapped to k11; k20:5 0:5i; k30; k40:5
0:5iinFig. 3(b), respectively.Moreover, all the three circles are
tangent at k11.
From the above results, we can see thatrAM1 would be enclosed by
a certain circle in the right-half plane if and only ifrD1L has a
nonnegative imaginary part. In [12], for 2D case, a series of
numerical experiments were made to prove numer-
Fig. 3. The linear fractional mapping.
Z. Chen et al. / Journal of Computational Physics 231 (2012)
81528175 8163
-
7/23/2019 A Dispersion Minimizing Finite Difference Scheme and
Precond - Chen Et Al - 2012
13/24
ically that there holds the sufficient condition, namely, the
spectrum ofD1Lhas a nonnegative imaginary part. However, for
the 3D case, we can not obtain that all of the eigenvalues for
D1Lhave a nonnegative imaginary part. Hence, not all of the
eigenvalues for AM1 would be enclosed by the red circle. Fig. 4
shows the spectrum for A; D1L and AM1 withk
15;z1
1;z2
1
0:5iand h
124. Fig. 4(a) presents the original spectrum for A, which is
scattered over both the left
and right half-planes. As can be seen, the real part of the
spectrum includes a part of the negative real axis with large
values,which means A is seriously indefinite. After
preconditioning, for AM1, a nice clustered spectrum is observed in
Fig. 4(c),which is far away from the origin with all of the
eigenvalues in the right half-plane. It is seen that most of the
spectrum
forAM1 is enclosed by the circle O12 ; 12 (plotted in red), with
few eigenvalues lying outside of the circle. We can expect thisfrom
the spectrum ofD1LinFig. 4(b), which shows that most of the
eigenvalues are located on the upper half-plane.Fig. 5shows the
corresponding spectrum withh;k;z2the same asFig. 4, butz11 0:05i,
namely, with 5% damping in(2.2). Thespectrum inFig. 5(b) is more
clustered due to a nonzero damping a.
As is known, the Krylov subspace method is particularly
efficient for the system with an Hermitian positive definite
ma-trix, or more generally, for system with all eigenvalues of the
coefficient matrix in the right half of the complex plane. In
Fig. 4,though some eigenvalues are not enclosed by the circle
O12 ; 12, the spectrum ofAM1 is still favorable enough forthe
convergence of Krylov subspace methods. Moreover, we can properly
choose the parameter b to make the spectrum
ofAM1 closer to one. In fact, for certain A;Mwith z1 :
1ai and z2 :
1
bi, according to Proposition5.3, there exists
someb0> 0, such that whena < b < b0; jk 1j is smaller
than a certain positive number. Hence, the spectrum ofAM1 inFig. 4
contributes to a fast convergence of the Krylov space method, which
is validatedby numerical experiments in Section 7.Nevertheless, it
should be pointed out that b should be chosen properly in order to
achieve a faster convergence of the Krylov
subspace method. When b is too small, though a good spectrum
ofAM1 can be obtained, it is difficult to invert approxi-mately the
preconditioner Mwith the multigrid method, due to its poor
property. On the other hand, since lim
b!1k0, when
bis too large, we would get an unfavorable spectrum near the
origin, which leads to a poor performance of preconditioning.
Fig. 6shows the spectrum ofAM1 forb2; b0:8 and b0:2,
respectively. Both the cases inFig. 6would weaken theefficiency of
the Krylov subspace method for solving the preconditioned system
(5.4). Hence, the choice ofbis a compromisebetween the convergence
rate of the multigrid method and a favorable spectrum of the
preconditioned system(5.4). In thistext, we choose b0:5 in(5.2),
which is a proper choice in practice.
Fig. 4. The spectral distribution for matrices (a) A, (b) D1L,
(c) AM1.
Fig. 5. The spectral distribution for A and AM1 withh1=24; k15;
z11 0:05iandz21 0:5i: (a) A; (b) AM1.
8164 Z. Chen et al. / Journal of Computational Physics 231
(2012) 81528175
http://-/?-http://-/?-
-
7/23/2019 A Dispersion Minimizing Finite Difference Scheme and
Precond - Chen Et Al - 2012
14/24
6. A 3D full-coarsening multigrid method in the preconditioned
Bi-CGSTAB
In this section, we develop a 3D full-coarsening multigrid
method to invert the preconditioner M approximately, whileusing the
preconditioned Bi-CGSTAB to solve the discrete preconditioned
system. For the full-coarsening strategy, we pro-
pose a new matrix-based prolongation operator.For solving the
Helmholtz problem, the Bi-CGSTAB method is usually preferred (cf.
[14]). As can be seen in Section5, thespectrum of the discrete
preconditioned system(5.4)is favorable for the convergence of
Bi-CGSTAB method. In the precon-ditioned Bi-CGSTAB algorithm, we
can not afford to invert exactly the preconditioner M in the
computation ofu :M1v,where vis the given vector with u to be
determined. Hence, we choose to solve the additional linear system
Muv. In orderto obtain a better approximate solution at a lower
cost, the multigrid method is employed to solve the additional
linear sys-tem. Thus, the preconditioned Bi-CGSTAB algorithm
combines Bi-CGSTAB and the multigrid method, which are considered
asthe outer iteration and inner iteration respectively. Now, we
consider solving the additional linear system with the
multigridmethod. For the multigrid method, the traditional linear
prolongation operator serves well for solving Muvwith
constantwavenumbers. However, for varying wavenumbers, it is not
robust enough, and leads to a divergence of the
multigrid-basedpreconditioned Bi-CGSTAB method. Here, we consider a
matrix-based prolongation operator, which is constructed based
onthe finite difference stencil, according to the algebraic
information of the coefficient matrix. In[44], a matrix-based
prolon-gation operator was developed to handle the 2D
convectiondiffusion problem. In[14], the multigrid based on Zeeuws
pro-
longation operator was used to invert approximately the
preconditioner for the 2D Helmholtz problem. Later, theprolongation
operator was extended to the 3D case with some modification
in[26,42], where the 3D multigrid was basedon the semi-coarsening
strategy, performing coarsening only in two directions while
keeping the third direction unchanged.
In this paper, we intend to employ the multigrid method based on
a 3D full-coarsening strategy, plus a pointwise smooth-er which is
easy to implement. The use of a pointwise smoother is to avoid the
alternating plane relaxation which is veryexpensive, because a
sub-system has to be solved in every plane. For the full-coarsening
prolongation operator, we have
Fig. 7. One coarse and eight fine grid cells with capital
letters indicating coarse grid points and small letters indicating
fine grid points.
Fig. 6. The spectral distribution ofAM1 with (a) b2; (b) b0:8;
(c) b0:2.
Z. Chen et al. / Journal of Computational Physics 231 (2012)
81528175 8165
http://-/?-http://-/?-
-
7/23/2019 A Dispersion Minimizing Finite Difference Scheme and
Precond - Chen Et Al - 2012
15/24
to take into account the prolongation in the third direction,
which need not be considered in the semi-coarsening case.
Moti-vated by Zeeuws 2D prolongation operator, we propose here a
new 3D full-coarsening matrix-based prolongation operator,which
gives a good performance.
To describe the construction of the new prolongation operator,
we begin withFig. 7, which shows one coarse and eightfine grid
cells with capital letters indicating coarse grid points and small
letters indicating fine grid points. The set of finegrids denoted
by Xh is split into eight disjunct subsets, that is,
Xh
fXh;0;0;0;Xh;1;0;0;Xh;0;1;0;Xh;1;1;0;Xh;0;0;1;Xh;1;0;1;Xh;0;1;1;Xh;1;1;1g:
Here, Xh;0;0;0 consists of fine grid points which are also
coarse grid points. Xh;1;0;0;Xh;0;1;0 and Xh;0;0;1 consist of fine
gridpoints which are located between two coarse grid points along
the x-, y- and z-axis, respectively. Xh;1;1;0;Xh;1;0;1 andXh;0;1;1
consist of fine grid points which are located respectively in
x-y;x-zand y-zplane but not next to any coarse gridpoints. Xh;1;1;1
consists of fine grid points which are not next to any coarse grid
points. For example, in Fig. 7,A;2 Xh;0;0;0, p2Xh;0;1;0;
q2Xh;1;0;0; r2 Xh;1;1;0; a02 Xh;0;0;1;p02 Xh;0;1;1; q02 Xh;1;0;1
and r02 Xh;1;1;1. Symbols eh andeHrepresent the grid functions for
the fine and coarse grid respectively. Assuming eHis already known
on coarse grids, the en-tries ofeh on fine grids can be obtained by
prolongation among the nearest coarse grid neighbors. For example,
the prolon-gation weights at p are denoted by WAp; WCp, and the
component ofeh on p is obtained by prolongation from A
andCaccording toWAp;WCp. Then, the 3D full-coarsening prolongation
operator can be expressed by
ehA:e2hA;
ehp:WApe2hA WCpe2hC;
ehq:WAqe2hA WBqe2hB;
ehr:WAre2hA WBre2hB WCre2hC WDre2hD;
eha0:WAa
0e2hA WA0 a0e2hA
0;
ehp0 :WAp
0e2hA WCp0e2hC WA0 p
0e2hA0 WC0 p
0e2hC0;
ehq0:WAq
0e2hA WBq0e2hB WA0 q
0e2hA0 WB0 q
0e2hB0;
ehr0:WAr
0e2hA WBr0e2hB WCr
0e2hC WDr0e2hD WA0 r
0e2hA0
WB0 r0e2hB
0 WC0 r0e2hC
0 WD0 r0e2hD
0;
8>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>:
6:1
where A2Xh;0;0;0;p2Xh;0;1;0; q2Xh;1;0;0, r2 Xh;1;1;0; a02
Xh;0;0;1;p02 Xh;0;1;1;q02 Xh;1;0;1; r02 Xh;1;1;1, andWA; WB; WC;
WD;WA0 ; WB0 ; WC0 ; WD0 denote the weights to be determined on
each fine grid. We can also re-write(6.1)in the form of
matrixvector multiplication, that is ehPeH, whereP is the
prolongation matrix (prolongationoperator) to be determined.
Now, we describe our new 3D full-coarsening matrix-based
prolongation operator, which is constructed based on the 27-
point stencil, that is, the algebraic information of the
coefficient matrix. In one coarse and eight fine grid cells,
prolongationweights should be derived from three kinds of fine
gridpoints, denoted by K1 Xh;0;1;0
SXh;1;0;0
SXh;0;0;1;K2
Xh;1;1;0SXh;1;0;1
SXh;0;1;1 andK3 Xh;1;1;1, respectively. Denote the 27-point
difference stencil for preconditionerMby
M,
M1;1;1 M0;1;1 M1;1;1
M1;0;1 M0;0;1 M1;0;1
M1;1;1 M0;1;1 M1;1;1
264
375z1
M1;1;0 M0;1;0 M1;1;0
M1;0;0 M0;0;0 M1;0;0
M1;1;0 M0;1;0 M1;1;0
264
375z
M1;1;1 M0;1;1 M1;1;1M1;0;1 M0;0;1 M1;0;1
M1;1;1 M0;1;1 M1;1;1
264 375z1
: 6:2
We first describe the determination of the prolongation weights
on fine gridpoints in K1. Taking the point a 0 inFig. 7forexample,
we have
eha0:WAa
0e2hA WA0 a0e2hA
0;
withWAa0; WA0 a0to be determined. AssumingMto be the difference
stencil ata0, thenM0;0;0is the entry ofMon the cen-tral pointa0.
IfMl;m;1or Ml;m;1(l;m2 f1;0;1g; l;m 0;0) is not zero, it means a
coupling between the value ofux;y;zat a0and the value at the
gridpoint corresponding to Ml;m;1or Ml;m;1. These couplings should
be incorporated in the construc-tion of prolongation weights WAa0
andWA0 a0. Experiments show that it would weaken the efficiency of
the multigridmethod when neglecting either Ml;m;1or Ml;m;1. Without
splitting Minto symmetric and anti-symmetric parts, we give a
sim-
ple formula
8166 Z. Chen et al. / Journal of Computational Physics 231
(2012) 81528175
-
7/23/2019 A Dispersion Minimizing Finite Difference Scheme and
Precond - Chen Et Al - 2012
16/24
r1 :Xl;m
Ml;m;1
; d1 :maxfjMl;m;1jg; l;m2 f1;0;1g:
r2 :Xl;m
Ml;m;1
; d2 :maxfjMl;m;1jg; l;m2 f1; 0; 1g:
j:maxfr1; d1g; i:maxfr2; d2g;
and
WAa0
jj i
; WA0 a0
ij i
: 6:3
We can similarly compute the prolongation weights on other
points in K1. The difference stencil Mhere is asymmetricdue to the
PML and varying wavenumber k in heterogenous medium, and we do not
split M(orM) into symmetric andanti-symmetric parts, as is done in
the construction of prolongation operator of Zeeuw-type [14,26,42].
The prolongationoperator of Zeeuw-type was originally developed
in[44]to handle the convectiondiffusion problem. The coefficient
matrixwas split into symmetric and anti-symmetric parts which were
considered to originate from the diffusion and convectionterms
respectively. In this text, the multigrid method is used to invert
approximately the preconditioner M for the Helmholtzproblem, and it
is not absolutely necessary to splitMinto symmetric and
anti-symmetric part as done for handling the con-vectiondiffusion
problem.
After obtaining weights on gridpoints in K1, we now describe the
determination of prolongation weights on fine grid-points in K2and
K3. Using the multigrid to solve Mu
v, after several relaxation sweeps, an approximate solution
denoted
by ~uis obtained, and the residual is ~r: v M~u. After the
coarse grid correction, we get a correction solution u: ~u eh~u
PeH, and its residual error is
r: v Mu ~r MPeH: 6:4
As in the 2D case of diffusion problems [1], in order to prevent
huge jumps in the norm of the residual after prolongation,
werequire
MPeHjK2 0: 6:5
Then, for the fine gridpoint in K2 such as r, we have
X1l1
X1m1
X1n1
Ml;m;nreh;l;m;nr 0: 6:6
Here, ifl; m; n 0;0;0; eh;l;m;nr denotes the component ofeh
restricted on r, otherwise it denotes the component re-stricted on
the neighbor ofr. We rewrite(6.6)as
X1l1
X1m1
Ml;m;0reh;l;m;0r X1l1
X1m1
Xn1;1
Ml;m;1reh;l;m;nr 0: 6:7
Assume that we have obtained the prolongation
eh;1;0;0r:WBte2hB WDte2hD;
eh;0;1;0r:WCse2hC WDse2hD;
eh;1;0;0r:WApe2hA WCpe2hC;
eh;0;1;0r:WAqe2hA WBqe2hB:
8>>>>>: 6:8
Substituting (6.8)andeh;0;0;0
r
into the first part of(6.7)and neglecting the second part, then
we can determine weights
WAr;WBr; WCrandWDrineh;0;0;0r:WAre2hA WBre2hB WCre2hC
WDre2hD:
However, the second part of(6.7)should not be neglected in order
to get a good prolongation at r. To this end, we leteh;l;m;1r
eh;l;m;nr eh;l;m;0r, and substitute them into the second part
of(6.7), yielding
X1l1
X1m1
X1n1
Ml;m;neh;l;m;0r 0; 6:9
which is an approximation of(6.7). From(6.9), we can compute
weights WAr; WBr; WCrandWDr, which would im-prove the performance
of the multigrid. In the meantime, (6.9)also contributes to a 2D
lumped stencil along the z-axis.Denoting
Z. Chen et al. / Journal of Computational Physics 231 (2012)
81528175 8167
-
7/23/2019 A Dispersion Minimizing Finite Difference Scheme and
Precond - Chen Et Al - 2012
17/24
Mzl;m :X1n1
Ml;m;n; l;m2 f1;0; 1g;
we have the 2D lumped stencil along the z-axis as
Mz,
Mz1;1 Mz0;1 M
z1;1
Mz1;0 Mn0;0 M
z1;0
Mz
1;1 Mn
0;1 Mz
1;1
2
664
3
775; 6:10
and the 2D lumped stencil along n-axis (nx;y) as
Mn ,
Mn1;1 Mn
0;1 Mn
1;1
Mn1;0 Mn0;0 M
n1;0
Mn1;1 Mn0;1 M
n1;1
2664
3775; 6:11
whereMxm;n :P1
l1Ml;m;n, Myl;n :
P1m1Ml;m;n; l; m; n2 f1;0;1g.Fig. 8shows the 2D lumped stencil
along the x-axis. In
the semi-coarsening case of[26], the lumped stencil in one
direction is similarly used. Thus, we complete the constructionof
prolongation weights for K1
SK2. Substituting all the weights already obtained
into(6.5)yields prolongation weights on
r02 K3, without splitting(6.6)into two parts and approximating
it. Up to now, we have finished the construction of the
pro-longation operator.
We remark that the construction of the 3D full-coarsening
prolongation operator is based on the difference stencilMand2D
lumped stencils along thex;y;z-axis respectively. That is, we use
the algebraic information of the coefficient matrix M. Ascan be
seen, prolongation weights are derived similarly in three
directions, and they are used to handle the variation
ofwavenumberkx;y;zalongx;y;z-axis respectively. In order to prevent
huge jumps of the norm of the residual after prolon-gation, 2D
lumped stencils in three directions are used, which shall
contribute to a more robust and efficient prolongationoperator in
practice. For the 3D Laplacian, with classical 7-point difference
stencil on fine grids without PML, 2D lumpedstencils reduce to the
classical 5-point stencil, and prolongation weights for p; q;
a0;p0; q0; r and r0 reduce to 12 ;
12 ;
12 ;
14 ;
14 ;
14,
and18, respectively, which is just the trilinear interpolation.
It is well known that the trilinear prolongation operator leadsto
an efficient and robust multigrid in this classical setting.
7. Numerical experiments
In this section, the numerical convergence of the new difference
scheme is tested, and some comparisons are made with
the compact sixth order difference scheme proposed in[34]. Then,
numerical experiments related to geophysical applica-tions are
presented to show the efficiency and robustness of the
multigrid-based preconditioned Bi-CGSTAB method forthe discrete
preconditioned system(5.4). The multigrid is based on the 3D
full-coarsening strategy with the new prolonga-tion operator. We
employ the full multigrid V-cycle (FMG), which possesses both the
robustness of the W-cycle and the effi-ciency of the V-cycle [9].
One FMG iteration with two relaxation sweeps is enough. For
multigrid components, the pointwise
Jacobi relaxation with underrelaxation (x-JAC) is used as a
smoother, which is easy to parallel. We adopt the full
weighting
z
xy
m0,0,1
x
m0,1,1
x
m0,1,1
x
m0,0,0
x
m0,0,1
x
m0,1,0
x
m0,1,1
x
m0,1,1
x
m0,1,0
x
Fig. 8. The construction of the lumped stencil along x-axis.
8168 Z. Chen et al. / Journal of Computational Physics 231
(2012) 81528175
-
7/23/2019 A Dispersion Minimizing Finite Difference Scheme and
Precond - Chen Et Al - 2012
18/24
restriction operator, the newly proposed prolongation operator,
and the coarse grid operator obtained by the Galerkin prin-ciple.
For the restriction operator, instead of using the transposition of
the prolongation operator, we choose the weightingoperator
suggested in[14],which gives a better performance here. The
experiments range from constant wavenumber tovarying wavenumber in
heterogenous medium. In the computation, a zero initial guess has
been used, and the precondi-tioned Bi-CGSTAB iteration terminates
when the Euclidean norm of the relative residual error is reduced
to the order of106. All the experiments here are performed serially
on an Intel Xeon (8-core) with 3.33 GHz and 96 Gb RAM.
Moreover,Matlab 7v is also used as the testing platform.
7.1. Numerical convergence and comparison of the new scheme
In this section, we shall present the numerical convergence of
the the new scheme, whose effect is also shown with aperturbation
of the weight parameter. Then, we compare the scheme with the sixth
order compact in [34], which was ob-tained by compact reformulation
of the Helmholtz equation. For convenience, we consider the
following 3D Helmholtz equa-tion with zero Dirichlet boundary
condition, which was similarly used in[34],
Duk2u f; in0;13; 7:1
where f : 3n2 1 sinnkx sinnky sinnkz, with kmp; m;n1;2;3; . . ..
Then, the exact solution isux;y;z sinnkx sinnky sinnkz=k2. Tables 2
and 3 give numerical convergence of the new scheme with its
variationcaused by the perturbation of parameters for k5p; m1 and
k12p; m4 respectively. C.O. denotes the numericalconvergence order
with error in the normj j1. OP, PPS and PPL represent the new
scheme using the original parameters,and parameters obtained by a
perturbation of the original by 0:01 and 0:1, respectively. As can
be seen, the new schemeis of second order convergence, and a small
perturbation of the parameter has a small influence on the scheme,
while a largeperturbation significantly influences its
convergence.
In Table 4, the new scheme is compared with the sixth order
compact scheme in [34]. We can observe that when the steph1=20 is
fixed, for small wavenumbers, the sixth scheme outperforms the new
second order scheme, but for large wave-numbers, the new second
order scheme gives a better performance. In fact, the sixth scheme
would definitely outperformthe new second order scheme, so long as
the step is small enough. However, in practice, the stephis related
with the wave-number k, especially for large wavenumbers. Due to
the storage limit, the number of gridpoints per wavelength Gcan not
betoo large, that is, step h can not be too small. In addition, the
pollution analysis of error shows that the accuracy not onlydepends
on the convergence order, but also the wavenumber. In this setting,
the new second order scheme may performbetter, since it can reduce
the numerical dispersion. InTable 5, fork30pandn10, we present the
numerical error cor-responding to both schemes with different
steph. We can see that the new second order scheme performs better
for a largewavenumber, ifh remains not too small. We point out that
both the sixth and the new second order scheme use 27 grid-
points, but they are developed based on different motivation.
After second order approximation, there are still lots of degreesof
freedom left. With these degrees, the sixth scheme aims to
construct a formula of high accuracy, assuming the wavenum-ber is
constant, the steps in all direction are equal, and the solution
and source term are smooth enough. However, the newsecond order
scheme combines these degrees with the relation of dispersion to
minimize the numerical dispersion. So, thenew second order scheme
is optimal in the sense of suppressing the dispersion, while the
sixth scheme is optimal in thesense of convergence order.
We now turn our attention to the preconditioned BI-CGSTAB method
for solving the linear systemAug, which is ob-tained by
discretization of the Helmholtz Eq.(7.1). The preconditionerMis
based on the 3D complex shifted-Laplacian. Weshall examine the
effect of three different discretizations of the Helmholtz and
preconditioning operator. The first scheme,denoted by SC62, uses
the 6th difference scheme in[34]to discretize the Helmholtz
operator, and uses the common 7-pointdifference scheme to
discretize the preconditioning operator. Two other schemes, denoted
by SN62 and NN22, respectivelyuse the 6th scheme in [34]and the new
2nd scheme in this paper to discretize the Helmholtz operator,
while both using thenew 2nd scheme to discretize the
preconditioning operator. We do not employ the 6th scheme to
discretize the precondi-
tioning operator, because the obtaining of the 6th scheme
involves a right-hand term. Fig. 9 shows spectra ofAM1
, based onSC62, SN62 and NN22, respectively, with k4p;
n5pandh1=16. As can be seen, SC62 gives a poor spectrum ofAM1,since
some of the eigenvalues locates in the left half-plane, which is
unfavorable for the convergence of the BI-CGSTAB meth-od. Both SN62
and NN22 contribute to a good spectral distribution ofAM1, which
are clustered in the right half-plane. In
Table 2
The numerical convergence of the new scheme with its variation
caused by perturbation of the parameters, for k 5p; n 1.
h 1/4 1/8 1/16 1/32 1/64
OP Error 1.50e2 3.70e3 8.59e4 2.22e4 5.58e5C.O. 2.02 2.10 1.96
1.99
PPS Error 1.51e2 3.80e3 1.00e3 3.89e4 9.92e5C.O. 1.99 1.93 1.92
1.97
PPL Error 3.34e
2 1.46e
2 6.10e
3 2.80e
3 1.44e
3
C.O. 1.19 1.25 1.14 0.96
Z. Chen et al. / Journal of Computational Physics 231 (2012)
81528175 8169
-
7/23/2019 A Dispersion Minimizing Finite Difference Scheme and
Precond - Chen Et Al - 2012
19/24
computation, since the discretization of the preconditioning
operator for SN62 is based on the 7-point scheme, it indeedsaves
multiplication operations. However, the effect of preconditioning
is not good, that is, it costs too many preconditionedBI-CGSTAB
iterations, which coincides with the spectrum inFig. 9(a). For SN62
and NN22, since both discretizations of the
Helmholtz and preconditioning operator are based on 27-point
scheme, they cost the same multiplication operations for
Table 6
Number of Bi-CGSTAB iterations and CPU time in minutes (in
parentheses) for different wavenumbers k with 2% and without
damping.
Grid k= 60 k= 100 k= 140 k= 180 k= 220
973 1613 2243 2883 3523
Ia0:00 43 (1.73) 60 (7.38) 83 (23.30) 108 (58.68) 152
(140.19)a0:02 32 (1.38) 42 (5.27) 55 (15.65) 70 (38.36) 89
(83.74)IIa0:00 45 (1.92) 64 (8.68) 90 (27.84) 119 (70.36) 168
(169.06)a0:02 34 (1.57) 46 (6.13) 61 (18.98) 78 (46.27) 99
(100.53)
0.5 0 0.5 1 1.51
0.8
0.6
0.4
0.2
0
0.2
0.4
0 0.2 0.4 0.6 0.8 10.5
0.4
0.3
0.2
0.1
0
0.1
0.2
0.3
0.4
0.5
0 0.2 0.4 0.6 0.8 10.5
0.4
0.3
0.2
0.1
0
0.1
0.2
0.3
0.4
0.5
Fig. 9. The spectra ofAM1 based on (a) SC62, (b) SN62, (c)
NN22.
Table 3
The numerical convergence of the new scheme with its variation
caused by perturbation of the parameters, for k 12p; n 4.
h 1/8 1/16 1/32 1/65 1/129
OP Error 1.49e1 3.61e2 8.60e3 2.20e3 5.46e4C.O. 2.02 2.10 1.96
1.99
PPS Error 1.35e1 3.75e2 9.70e3 2.50e3 6.38e4C.O. 1.85 1.95 1.98
1.97
PPL Error 7.39e2 4.10e2 1.14e2 8.00e3 4.32e3C.O. 0.85 1.84 0.51
0.88
Table 5
Comparison of the error for the new and sixth schemes when k 30p
and n 10.
h 1=20 1=40 1=80 1=160
6th Error 16808 1081 21.76 0.4128C.O. 3.96 5.63 5. 72
2nd Error 0.0710 0.0442 0.0115 0.0029C.O. 0.6838 1.94 1.98
Table 4
Comparison of the new scheme with the sixth order scheme, for
different k with n 5 and h 1=20.
k 2p 3p 4p 5p 6p 7p 8p
G2pkh
22.0 14.7 11.0 8.8 7.3 6.3 5.5
Error for 6th 0.0014 0.0097 0.0389 0.1258 0.3468 1.315
20.69Error for 2nd 0.0116 0.0126 0.0206 0.0250 0.0286 0.0559
0.4969
8170 Z. Chen et al. / Journal of Computational Physics 231
(2012) 81528175
-
7/23/2019 A Dispersion Minimizing Finite Difference Scheme and
Precond - Chen Et Al - 2012
20/24
each preconditioned BI-CGSTAB iteration, and the total
iterations make little difference. In Section 7.2to Section7.4,
weadopt the scheme NN22, that is, both the Helmholtz operator A and
the preconditioning operatorM are discretized bythe new second
order scheme.
7.2. The 3D Helmholtz-PML equation with constant wavenumber
We consider a domain X 0;13, with point and line sources placed
at different locations of the domain. The number ofgridpoints per
wavelength is chosen to be G= 10, and an accuracy requirement for
second order discretizations is thatkh 6 2pG p5. The thickness of
the PML is set to be 20, that is, the PML possesses 20 gridpoints
in each direction. Table 6pre-sents the number of preconditioned
Bi-CGSTAB iterations and the CPU time needed (in parentheses) in
minutes, with andwithout damping for different wavenumbers
respectively. The largest wavenumber for test is k220, and the
number ofunknowns (without PML) is 3523 43;614;208 (about 43.6
millions).
In Tables 6, (I) represents the preconditioned BI-CGSTAB method
based on the 3D full-coarsening multigrid with the new-ly proposed
prolongation operator, plus a point-wise x-JAC smoother. (II)
represents the preconditioned BI-CGSTAB meth-ods based on the 3D
semi-coarsening multigrid with the Zeeuws prolongation operator,
plus a line-wise x-JAC smoother.Fork220 without damping, it needs
152 iterations for method (I), and the CPU time needed is about 140
min. As can beseen from the table, the method (I) gains a faster
convergence than (II). Moreover, the CPU time needed for each
iteration of(I) is less than that of (II). This is justified by the
fact that the multigrid with semi-coarsening method has larger
coarse grid
operators, compared with the counterparts in full-coarsening
method. It can also be observed that the convergence speedwith some
damping in the Helmholtz problem is faster than that without
damping, and we can expect this from the spectraldistribution in
Fig. 5 (b), which is more clustered. Fig. 10 presents the number of
iterations for the preconditioned Bi-CGSTABmethod versus wavenumber
k. We keep khp5, which means 10 gridpoints per wavelength is used.
In Fig. 10, a nearly linearincrease is observed in the number of
iterations with the increase of wavenumber k, especially for the
damping case. Thenumerical solution corresponding to k60 without
damping (a0) is presented inFig. 11, with point and line
sourcesplaced at different locations of the domain.
7.3. The three layers model
The three layer model is used to evaluate the preconditioned
Bi-CGSTAB for a simple heterogeneous medium, in whichcase the
wavenumberkis slightly varying due to the varying velocityvin
different medium. We consider a physical domainwhich is defined to
be a cube of dimension 760 m
760 m
760 m. A point source is located at the upper surface with
(60 m, 60 m, 0 m), where the upper surface is assigned to
bez0.Fig. 12presents the domain with three layers, and thevariation
of velocity in the medium. InFig. 12(a), the first, second, and
third layer represent 1600 m/s, 2400 m/s, 3200 m/srespectively. The
real part of the numerical solution atf30 Hz without damping is
plotted inFig. 12(b).Table 7presentsthe convergence of the
preconditioned Bi-CGSTAB method for different frequencies (varying
from 20 to 60 Hz) with 2% andwithout damping. The number of
Bi-CGSTAB iterations and CPU time in minutes are presented. As can
be seen, method (I)performs robustly and still achieves a faster
convergence than method (II).
7.4. The 3D salt dome model
We evaluate a more complicated heterogeneous medium, namely, the
3D salt dome model, which mimics the subsurfacegeology under the
sea. The physical domain considered here is defined to be a cube of
dimension 960 m 960 m 600 m. Apoint source is located at point (481
m,481 m,257 m) under the upper surface, which is assigned to
bez0.Fig. 13(a) pre-sents the 3D salt dome model, and the variation
of velocity in different medium. Fig. 13(b) and (c) present the
cross-sectionof the 3D salt dome model at x481 m and y549 m
respectively. The velocity of sound is irregularly structured
60 80 100 120 140 160 180 200 22020
40
60
80
100
120
140
160
180
Wavenumber k
Numberofiterations
Method (I), =0.00
Method (I), =0.02
Method (II), =0.00
Method (II), =0.02
Fig. 10. The number of iterations for preconditioned Bi-CGSTAB
versus wavenumber k.
Z. Chen et al. / Journal of Computational Physics 231 (2012)
81528175 8171
http://-/?-http://-/?-http://-/?-http://-/?-
-
7/23/2019 A Dispersion Minimizing Finite Difference Scheme and
Precond - Chen Et Al - 2012
21/24
throughout the domain. The lowest velocity is 1524 m/s and the
highest velocity is 4480 m/s, which is in the salt dome (thered
part in Fig. 13). The snapshots of the real part of the numerical
solution forf 30 Hz without damping atx481 m andy549 m are
displayed inFig. 14. We can observe the wave filed propagating from
the source (481 m, 257 m) through themodel.Table 8 presents the
preconditioned Bi-CGSTAB convergence for the case with and without
damping for different fre-
quencies, which vary from 20 Hz to 40 Hz. The numbers of
Bi-CGSTAB iterations and CPU time in minutes (in parentheses)
Fig. 11. The real part of numerical solution fork60 with point
and line sources placed at different locations. (a) point source at
the center of the domain;(b) 2D cross-section of (a) along
thex-axis; (c) point source on the edge (z-axis); (d) point source
on the corner; (e), (f), (g) point sources on the upper faceand
right face; (h), (i) line sources in the directions ofx-axis
andy-axis.
1.6km/s
2.4km/s
3.2km/s
x
z
y
Fig. 12. (a) The three layers model with speed profile
indicated. (b) The real part of numerical solution at f 30 Hz.
8172 Z. Chen et al. / Journal of Computational Physics 231
(2012) 81528175
-
7/23/2019 A Dispersion Minimizing Finite Difference Scheme and
Precond - Chen Et Al - 2012
22/24
x (m)
z(m)
120 240 360 480 600 720 840 960
120
240
360
480
600
y (m)
z(m)
120 240 360 480 600 720 840 960
120
240
360
480
600
Fig. 13. (a) The 3D salt dome model with velocity profile
indicated; (b) and (c) the cross-section of 3D salt dome model at
x481 m andy549m,respectively.
x (m)
z(m)
120 240 360 480 600 720 840 960
120
240
360
480
600
y (m)
z(m)
120 240 360 480 600 720 840 960
120
240
360
480
600
Fig. 14. Monofrequency wavefield (real part) for f 30 Hz without
damping at (a) x481 m ; (b)y549 m, respectively.
Table 7
The number of Bi-CGSTAB iterations and CPU time in minutes (in
parentheses) for the three layers model with 2% and without
damping.
Grid f= 20 f= 30 f= 40 f= 50 f= 60
893 1213 1853 2323 2963
(I)a0:00 48 (1.58) 61 (3.78) 79 (13.66) 105 (32.63) 141
(81.96)a0:02 43 (1.50) 52 (3.34) 65 (11.47) 82 (25.68) 110
(65.25)(II)a0:00 50 (1.79) 66 (4.61) 90 (16.66) 118 (39.64) 159
(100.67)a0:02 45 (1.68) 56 (3.88) 74 (13.59) 91 (31.56) 122
(78.32)
Z. Chen et al. / Journal of Computational Physics 231 (2012)
81528175 8173
-
7/23/2019 A Dispersion Minimizing Finite Difference Scheme and
Precond - Chen Et Al - 2012
23/24
are shown. Forf 40 Hz, the interior domain contains 257 257 161
10;633;889 gridpoints (about 10.6 million). Withthe PML, the
unknowns amount to 297 297 201 17;730;009 (about 17.7 million) in
total. The numbers of iterationsfor method (I) and (II) without
damping are 158 and 180, with the time-consuming being about 42 and
53 min, respectively.For the complicated heterogeneous medium,
method (I) still achieves a robust performance, and outperforms
method (II).Even though both method (I) and (II) have the same
iterations, method (I) has an advantage over method (II).
Becausethe semi-coarsening strategy in method (II) leads to a
gradual decrease of the coarse grid operators, and more time
wouldcost in each iteration of the preconditioned Bi-CGSTAB
method.
8. Conclusion
In this paper, we study the numerical solver for the 3D
Helmholtz equation with a boundary of PML. Both the finite
dif-ference scheme and preconditioned iterative solver are
concerned.
For the discretization of 3D Helmholtz-PML equation, we have
developed a new 27-point finite difference scheme, whichis second
order. The new scheme has been proved to be consistent with the 3D
Helmholtz-PML equation, and equivalent tostaggered-grid 27-point
scheme under certain conditions. The classical dispersion analysis
has been made to obtain theapproximation of numerical wavenumber to
the exact wavenumber. Based on minimizing the numerical dispersion,
a re-fined choice strategy is taken to optimize parameters of the
new difference scheme. Comparisons of phase velocity showthe
improvement of the new scheme with refined optimal parameters.
After discretization of the 3D Helmholtz-PML equation with the
new difference scheme, we obtain a sparse indefinite lin-ear
system. To solve the linear system, the preconditioned Krylov
subspace method Bi-CGSTAB has been employed, and thepreconditioner
is based on the 3D complex shifted-Laplacian-PML preconditioner,
which is generalized from the 2D shifted-
Laplacian preconditioner. A spectral analysis is given from the
perspective of fractional linear mapping in complex
variablefunction. In order to invert approximately the
preconditioner, the multigrid method has been used, which is based
on the 3Dfull-coarsening strategy, plus a pointwise Jacobi
smoother. A new matrix-based prolongation operator has also
beenconstructed for the 3D full-coarsening multigrid. Numerical
experiments have been presented, ranging from constantwavenumbers
to highly varying wavenumbers in heterogeneous medium. Numerical
results illustrate the efficiency ofthe full-coarsening
multigrid-based preconditioned Bi-CGSTAB method.
References
[1] R. Alcouffe, A. Brandt, J. Dendy, J. Painter, The multigrid
method for the diffusion equation with strongly discontinuous
coeffcients, SIAM J. Sci. Statist.Comput. 2 (1981) 430454.
[2] I. Babuka, F. Ihlenburg, E. Paik, S. Sauter, A genralized
finite element method for solving the Helmholtz equation in two
dimensions with minimalpollution, Comput. Methods Appl. Mech.
Engrg. 128 (1995) 325359.
[3] I. Babuka, S. Sauter, Is the pollution effect of the
FEMavoidable for the Helmholtz equation considering high wave
numbers, SIAM Rev. 42 (2000) 451
484.[4] G. Baruch, G. Fibich, S. Tsynkov, E. Turkel, Fourth
order schemes for time-harmonic wave equations with discontinuous
coefficients, Commun. Comput.Phys. 5 (2008) 442455.
[5] A. Bayliss, C. Goldstein, E. Turkel, An iterative method for
Helmholtz equation, J. Comput. Phys. 49 (1983) 631644.[6] A.
Bayliss, C. Goldstein, E. Turkel, The numerical solution of the
Helmholtz equation for wave propagation problems in underwater
acoustics, Comput.
Math. Appl. 11 (1985) 655665.[7] M. Benzi, Preconditioning
techniques for large linear systems: a survey, J. Comput. Phys. 182
(2002) 418477.[8] J. Brenger, A perfectly matched layer for the
absorption of electromagnetic waves, J. Comput. Phys. 114 (1994)
185200.[9] W. Briggs, V. Henson, S. McCormick, A Multigrid
Tutorial, Second ed., SIAM, California, 2000.
[10] Z. Chen, H. Wu, An adaptive finite element method with
perfectly matched absorbing layers for the wave scattering by
periodic structures, SIAM J.Numer. Anal. 41 (2003) 799826.
[11] Z. Chen, T. Wu, H. Yang, An optimal 25-point finite
difference scheme for the Helmholtz equation with PML, J. Comput.
Appl. Math. 236 (2011) 12401258.
[12] Z. Chen, D. Cheng, W. Feng, T. Wu, H. Yang, A
multigrid-based preconditioned Krylov subspace method for the
Helmholtz equation with PML, J. Math.Anal. Appl. 383 (2011)
522540.
[13] J. Douglas Jr., D. Sheen, J. Santos, Approximation of
scalar waves in the space-frequency domain, Math. Mod. Methods
Appl. Sci. 4 (1994) 509531.[14] Y. Erlangga, C. Oosterlee, C. Vuik,
A novel multigrid based preconditioner for heterogeneous Helmholtz
problems, SIAM J. Sci. Comput. 27 (2006) 1471
1492.[15] Y. Erlangga, C. Vuik, C. Oosterlee, On a class of
preconditioners for the Helmholtz equation, Appl. Numer. Math. 50
(2004) 629651.
Table 8
The number of Bi-CGSTAB iterations and CPU time in minutes (in
parentheses) for the 3D salt dome model with 2% and without
damping.
Grid f= 20 f= 25 f= 30 f= 35 f= 40
1292 81 1612 101 1932 121 2252 141 2572 161(I)a0:00 57 (3.01) 72
(6.17) 89 (11.95) 120 (23.64) 158 (42.51)a0:02 55 (2.95) 67 (5.84)
81 (10.90) 106 (21.03) 139 (37.92)(II)a0:00 61 (3.52) 79 (6.68) 102
(14.95) 137 (29.27) 180 (53.46)a0:02 58 (3.41) 73 (6.17) 91 (13.42)
118 (25.83) 157 (47.89)
8174 Z. Chen et al. / Journal of Computational Physics 231
(2012) 81528175
-
7/23/2019 A Dispersion Minimizing Finite Difference Scheme and
Precond - Chen Et Al - 2012
24/24
[16] X. Feng, H. Wu, Discontinuous Galerkin methods for the
Helmholtz equation with large wave number, SIAM J. Numer. Anal. 47
(2009) 28722896.[17] M. Van Gijzen, Y. Erlangga, C. Vuik, Spectral
analysis of the discrete Helmholtz operator with a shifted
Laplacian, SIAM J. Sci. Comput. 29 (2007) 1942
1958.[18] J. Gozani, A. Nachshon, E. Turkel, Conjuate gradient
coupled with multigrid for an indefinite problems, in: R.
Vichnevestsky, R.S. Tepelman (Eds.),
Advances in computer methods for partial differential equation,
vol. V, IMACS, New Brunswick, NJ, 1984, pp. 425-427.[19] B.
Hustedt, S. Operto, J. Virieux, Mixed-grid and staggered-grid
finite difference methods for frequency-domain acoustic wave
modelling, Geophys. J.
Int. 157 (2004) 12691296.[20] F. Ihlenburg, I. Babuka, Finite
element solution of the Helmholtz equation with high wave number,
Part I: The h-version of the FEM, Comput. Math.
Appl. 30 (1995) 937.[21] F. Ihlenburg, I. Babuka, Dispersion
analysis and error estimation of Galerkin finite element methods
for the Helmholtz equation, Int. J. Numer.
Methods Eng. 38 (1995) 42074235.[22] C. Jo, C. Shin, J. Suh, An
optimal 9-point, finite difference, frequency-space, 2-D scalar
wave extrapolator, Geophysics 61 (1996) 529537.[23] A. Laird, M.
Giles, Preconditioned iterative solution of the 2D Helmholtz
equation, Report 02/12, Oxford Computer Laboratory, Oxford, UK,
2002.[24] Y. Luo, G. Schuster, Parsimonious staggered grid finite
differencing of the wave equation, Geophys. Res. Lett. 17 (1990)
155158.[25] S. Operto, J. Virieux, P. Amestoy, J. LExcellent, L.
Giraud, H. Ali, 3D finite difference frequency-domain modeling of
visco-acoustic wave propagation
using a massively parallel direct solver: a feasibility study,
Geophysics 72 (2007) 195211.[26] C. Riyanti, A. Kononov, Y.
Erlangga, C. Vuik, C. Oosterlee, R. Plessix, W. Mulder, A parallel
multigrid-based preconditioner for the 3D heterogeneous
high-frequency Helmholtz equation, J. Comput. Phys. 224 (2007)
431448.[27] Y. Saad, W. Schultz, GMRES: a generalized minimal
residual algorithmfor solving nonsymmetric linear system, SIAM J.
Sci. Statist. Comput. 7 (1986)1
176.[28] E. Saenger, N. Gold, A. Shaoiro, Modeling the
propogation of elastic wave using a modified finite difference
grid, Wave Mot. 31 (2000) 7792.[29] C. Shin, H. Sohn, A
frequency-space 2-D scalar wave extrapolator using extended
25-point finite difference operator, Geophysics 63 (1998)
289296.[30] I. Singer, E. Turkel, A perfectly matched layer for the
Helmholtz equation in a semi-




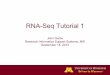

![Modeling and Dynamic Analysis of Planetary Gear ......gear, aiming at minimizing the vibration displacement of the low-speed carrier. Y. F. Chen [8] investigated the influence of the](https://img.pdfslide.us/doc/110x75/5f0422ac7e708231d40c7d17/modeling-and-dynamic-analysis-of-planetary-gear-gear-aiming-at-minimizing.jpg)