Embed Size (px)
Citation preview

European Journal of Control (2009)2: 143-156 © 2009 EUCA DOl: 10.3 166/EJCI5.14J-156
European Journal of
Control
A Discrete-time Observer Based on the Polynomial Approximation of the Inverse Observability Map
Alfredo Germani u ,* and Costanzo Manes 1.3,**
' Department of Electrical and Information Engineering, University of L'Aquila, Poggio di Roio, 67040 L'Aquila. Italy; 2Universita Campus Bio·Medieo of Rome. Via Alvaro del Portillo, 21 . 00 12)1 Rorna Italy: 31stituto di Analisi dei Sistemi ed Informatica del CNR "A Rubeni". Viall' Manzoni 30. 00185 Roma, Italy
This paper investigates the problem oj asymptotic state obsefl'ation Jor analytic lion linear disaete-time systems. A new tee/lllil/tleJor the observer cOllstruction, based on the Taylor polynomial approximation oj the inverse oj the ohserrahility map, is pre,l'ented and disws,l·etl. The degree dlOsell Jor the approximation is the most important design parameter oj the ob,l'erl'l!r, ill that it call be dlOsen ,wch to ellsure the ('onl'ergence of the obserwlfion error at ally desiretl exponential rate, ill any prescrihel/ cOIII'ergen("f! region (semiglohal expollential COli vergence).
Ke}'words: Observer design, discrete-time nonlinear systems, polynomial approximation.
I. Introduction
The importance of the problem of asymptotic state observation of nonlinear dynamical systems is well known, and a large amount of scientific literature on this subject is available. Although the case of continuous time systems has been more intensively studied in the past, an increasing number of authors is devoting the attent ion to the state observation problem in the discrete-time framewo rk. Many papers discuss the extension to discrete-time systems of observer design techniques devised and developed fo r
• Email: alfredo.german;@. univaq.it •• CorrespomlNlce 10: C Manes, Email: oostanzo.mancs@un;vaq,;t
continuous time systems. An approach widely investigated is to find a nonlinear change of coordinates and, if necessary, an output transformation, that transform the system into some canonical form suitable for the observer design using linear methodologies. First papers on the subject are (1 0],(23],(24], where autonomous systems are considered , and quite restrictive conditions are given for the existence of the coordinate transformation that allows the observer design with linearizable error dynamics. Other papers concerned with the problem of finding conditions for the existence of the change of coo rdinates are (30] and (3 1], for autonomous systems, and (3) and (7] for nonautonomous systems. The drawback of this approach is that in general the computation of the coordinate transformation, when existing, is a very difficult task. Also the technique proposed in (22] requires to solve funct ional equations that in general do not admit a closed form solu tion. An interesting approach fo r the construction of observers with linear error dynamics for systems admitting a differentiall di fference representation is reported in (26] . Another approach consists in designing observers in the original coordinates, finding iterative algorithms, typically inspired by the Newton method , that asymptotically solve suitably defined observability maps (see e.g. [12), [13) and (27)) . Sufficient conditions of local convergence are provided , in general, under
Ree.:ired f() April 2008; Accepled /8 Decem""f M08 Raommend"d by D. Normand-eyrol and S. Monaco.

144
the assumption of Lipschitz nonlinearities. The use of the Extended Kalman Filter as a local observer for noise- free systems has been investigated in [29], (4], [5] and [28]. In (28], sufficient conditions of convergence are given in term of existence of a solution for some Linear Matrix Inequalities (LMI). Some authors propose observers for particular classes of systems. In [32) an observer with standard Luenberger form and constant gain is proposed for autonomous systems with the state transition function characterized by Lipschitz nonlinearities and with linear output transformation. Sufficient convergence condit ions are given in term of LM I. Nonlinear systems with linear measurements are also considered in [1 ) and [6]. The problem of asymptotic state reconstruction for systems described by bilinear state-transition functions and rational output functions is considered in [17], where, using the tool of the Kronecker algebra, the problem has been solved through the immersion of the nonlinear system into a linear one of larger dimension . In [19] the use of polynomial approximations of nonlinear d iscrete-time systems for solving the state observation problem has been investigated, and conditions for the exponential convergence of the polynomial extended Kalman filter [18], when used as an observer, are studied .
This paper p resents a new method for the construction of an observer for nonlinear discrete-time systems of the type
X(I + 1) ~ j(X(I)), I E Z, (1 )
y(l) ~ h(X(I»,
where x(t) E IRN is the system state, y(t) E IR is the measured output, f: IRN_ IRN is the one-step state transition map, and II : IRnl-->IR is the output function. System (I) is assumed to be globally analytic. that means that bothfand II are analytic funct ions in all compact sets of [R" . The approach employed here can be considered the discrete time equivalent of the approach followed in [II] and [1 4]. T he method is based on the Taylor polynomial approximation of the inverse of the observabil ity map (the function that maps states into output sequences) up to a given degree 1/ > I, and constitute a nontrivial extension of the one presented in [12), where only the fi rst degree Taylor approximation has been considered, and only local convergence is guaranteed . T he main novelty of the contribution here presented is that, thanks to the analyticity assumption, the degree of the approximation can be chosen such to guarantee the exponential convergence of the observation error to zero when the initial observation error is inside a ball of prescribed rad ius, centered at the o rigin . It follows that
A. Germani and C. M{mes
the proposed observer has the important property to be a semiglobal exponential observer, in that both the convergence rate and the radius of the convergence region can be arbitra rily assigned.
T he paper is organized as follows. In sect ion II some preliminary definitions and notations a re given, and previous work of the authors on the subject is d iscussed . In sect ion III the new observat ion algorithm is presented and its convergence propert ies are d iscussed . Simulation results and conclusions follows. An extended Appendix is also present, where the theory of the Taylor approximation of the inverse of a nonlinea r vector function is explained in some detail.
2. Preliminaries
In this section some definitions, notations and concepts that will be used throughout the paper are presented, and relations with the authors' previous work are discussed. T he symboI F ( x ) , with r E N, is recursively defined as:
f o(x) = x,
f'+'(x) ~ (fof')(x) ~ f(f' (x)) , ,> 1. (2)
(the sym bol 0 denotes the composit ion of functions), and is used to denote the r-steps state transition , that allows the computation of future system states as a function of past states:
X(I + ,) ~f'(X(I». (3)
The output at time t + r can be written as a function of x ( t ) as follows
(4)
Definition 2.1 : The ohserl'llhility map for the system (1 ) is a reClOr fllllCtioll :: + 1> (x ) , with 1> : IRnl-->IRn, defined as:
<1>(X) ~
h or-1(x)
hofl (X) h(x)
(5)
LeI Y, del/ote the slaL·ked olltPll1 sequenL"e y ( t) in Ihe illlerl'lll/t,1 + II)
Y, =
y(I + II - 1)
y(I + 1) Y(I)
(6)

Polynomial Approxinwlioo 0/ flu> Inl"l.'f.w OhWfl'llhilily Map
By Ihe defillilion of Ihe obserrabililY /IIap . Ihe following holds:
Y, = <I> (X( /)) . (7)
Definicion 2.2: The ob.I'efI'abiliIY lIIatrix for Ihe syslelll ( I ) i.s:
d Q(x) = - "'(x ).
(Ix (8)
FolIOlfing the 1I0iatiom introdllce(1 ill the Appendix, Q (x ) will be also )\'fitten as V.r(j)(x) or \7 x ® 4>(x ) (.fee ( 100) inlhe Appendix) .
Remark 1: Note that for linear .~ystem.\· the (IbMI.' definition of obsermbililY mmrix coincide.l· lI'ilh the dassicallinear olle.
Definicion 2.3: The 1I01llillear syslem ( I ) is said to be observable in an opell .1·lIbset n C Rn if ils obserl"llbility map (5) i.~ illlwtible ill n, i.e .. fhere exi.m 4> - 1(: ) slIch Ihat (1) - 1 (4)(x )) = x Jor lIli x E n. Ifn = R", thell Ihe .~ysfe/ll ( I ) is saM to be globally observable.
The Definitioll 2.3 of ob.fen'ability .wate.~ Ihe theorerical possibility of the reconstruction of the .Hate of ( I
1I01llillellr .1")'.1'11'111, at a gil'ell tim e t, exploitillg Ihe kllowledge of Ihe Olllplll .\'eqllellce ill Ihe inleTl'al [1,1 + n),lIs
X( /) = <1>-' ( Y,). (9 )
Such a po.uihilily ill mO.fl CllSt'S re/l/aills IheoretiCll1 beclIuse. ill general, clo.~etlformsfor Ihe inrer.~e of the obsefl'ahilil)' map are 1101 (l1'{Ii/ahle. Note Ihat the obser\'{/hililY property ill a set n implie.~ that the ObSerl'llhililY matrix Q (x ) is /lOIuillglllar ill n.
Definicion 2.4: Tile lIolllillear .I'y.l'lem ( I ) i,l' ,wid to he uniformly Lipschitz observable ill lIlI opell subset n C an iffil i,l' obsefl'able, (lnd ifbolh map.l· 4> (x ) alld (I> - 1(:), lire ulliformly Lip.I'chi/: ill n llIU/ ill 4> (n ), re,~peefil'ely. Thi~i melllu fhal Ihere exist 111'0 relll lIumbers)'40 -, alld -Y40 .fllCh Ihat
1I "'(x, ) - "'(x,)11 < , . lI x, - x,lI, Vx" x, E 0 ,
11 "'- ' (, ,) - <1>-' (, ,)11 < ,. ,II" - ' ,II, '17':1, =2 E 4>(0) .
(10)
If n = an, Ihell the .fy.\'/em ( I ) is said /0 be globally uniformly Lipschitz observable,
Definicion 2.5: CO/Hitler (I (/Jlmmie syslem of Ihe form
(( I + 1) = g((( /), ,.(/), 0), I E Z, ( 11)
(( I) = m((( /), ,.( /), 0),
145
where ( f) E lR.~ i.f the .f)'.ftem stme , 0 E 1R" is a set of COIISWIII parameler.f, alld y (t) E R i.I' Ihe Oilipul of ,\'j',wem ( I ) .
• System (II), with a given choice ofO, is said to be a /oclIl (l.I')'1I1PlOlic obsefl'er for ( I) if there exist an open set n C lRn and 8 E R+ such that, for any pair X(/O ), , (/o) E 0,
IIx(/o ) - Wo) 1I < Ii => lim IIx(/) - W)II = O. ,_0 ( 12)
• The sysCem ( II ) is said to be II semiglobal asymptotic ob,I'efl'er if for any n C IR" and 6 E IR+ there exists a cho ice 0 such to guarantee the implication (12) for any pair x (to ),'(/o ) E n.
• The system (II), with a given choice of 0, is s.'l id to be a global asymptofic ob.I'en'er fo r ( I) if for any pa ir X(lo), (/0) E R~ ic is lim,_o [l x (/) -, (1)11 = o.
Remark 2: A,uuflle Ihm (I syslem of the type ( I J) provides (/ sequence at) .\'uch 111m for (Ill pairs X(lo) ,~( ro) E R." it is
lim II Y, - "'(W))II = o. ,_0 ( 13)
If tlU! ,fy!.'lem ( I ) i.f IIl1iformly Lipschi/: ohserl'llble , then ( II ) is 1I globa l asymptotic observer. This happel/s bec(llI.se the Upschit= property implies the fol/OJrillg
II x(/) - ,(1) 11 = 11 " - ' ('I' (x( /))) - ",- '(",(,(t)))11
= II"'- '( Y,) - '1'- '( " (W))) 11
< , . -, II Y, - .,, (,(/)) 11,
( 14)
and therefore IIx (l) - ~( / ) II -- 0 , COllsitier II globally obsenl/ble syslem of the type
( J) , Thl/llh to Ihe a.Hllmplioll of infertihilily of Ihe obsefl'lIhilily /IIap, thi.~ C(l1I be used to define a 111.'11' .fer of coordillllles for .1")Islem ( J) :
:(1) = 1)(X(/ - II + I» . ( 15)
NOll' IlIlII : ( l ) i.f IIS(!l/ here /0 represelll lite .f),stem stale
lit lime t - /I + I . ReClIllillg the i(/ell/ity (7), it follol\'s that
: (r) = Y,_,,+I. ( 16)

146
Let (A",S" ,C,,) he a Brlllloll'sky triple oj dimension II,
defined as:
0 0 0 0 0
1 0 0 0 0
A" = 0 1 0 0 0 E R.nxn ,
000 1 0
1
o S , 0 E lR" , Cb=[ O O O ...
o
Using these matrices the Jollowing cqualioll.l" "old.l"
Y I-n+2 = A " Y I_n+ 1 + 8 1>)'(1+ I),
y( f - /I + 1) = C" YI_n+l .
( 17)
( IS)
W ith the substillliioll ~ ( t ) = Y'_ 1i + I. Ihese ('(III he re ll' rillclI as
Z( I + I) = AbZ( /) + Bhy( t + I),
)'( 1 - 11 + I) = C,,=(t) ( 19)
If the illl'erse map <t:> - 1( .) were aWI/'fuble. then the originulstale X(I) could he easily wmplIledfrolll z (i) in 111'0 Sleps: first x(t - /I + I ) i.l' wII/puled as
X(/ - n + I) = <1>- 1 (z(t», (20)
amltliell x(t) is computed as
x (t ) ~ 1"-' (x (t - ,, + I)) ~ 1"-' ("'-' (,( t )) .
(21 )
11 follow.~ that. using the z-coordillules, system ( I) ('(In
be rewritten a.I":
z (t + I ) ~ A, z (t ) + S , h ° J" (<I>- ' (z (t ))),
y (t) ~ h o/"- '("'-'(, (t))) . (22)
The problem is that a closedform for the inrerse of the observability map of a gil'ell sp"tem is /lot aMi/able. in general. Numerical iteratil'c methods ('(III he 1I,l"nifor the compulatioll of X( I - 1/ + I) , by filldillg the (1IIIiqlle) roo/ of
z(t ) - <I>(x) ~ O. (23)
A . Germani and C. M{1IIes
III [12l/heJollowing obsencr structure was proposed
.,( t + I ) ~fl.,( t ))
+ (Q(f( .,(t ))) )-' ( s , (y( t + I) - h0J" (.,( t )) )
+ K( y( t - ,,+ I ) - h( .,(t )) ) )
x{t) =r - 1{1/'( t» ,I> lo = II - 1,
(24)
where Q(.) i,l" the obscrrahilit), matrix (8) of s),.\"lel1l
( J) . For this obsencr, the following local collvergf!l1('C
result holtls true ( Theorem 2.1 of[ 12))
Theorem I: For a .~ystelll of the type ( 1) there exists a fillite gain I'ector K EIRn lind a suiwhle 8 > 0 such that the .I'plem (24) is (/ local obsl!rl'f!r, provided that:
• System ( 1) is globally Lipuhitz obsl!rl'uble definition 2.4) ;
• "and fare uniformly Lip.\"chitz ill IR"; • I ~"- ,(.,( to)) - x(to )11 > h.
( see
The proof of this theorem ill [12] exploits Ihe represcllla/ioll (22) oJsy stem (I) . Note IIial the theorem is here slated using the notations illtrolluced in this paper, and that the Lipsdlitz obserl'ability condition implies the full rank property of the obsermbility lIIatrix Q.
3. The Polynomial Observer
T he observer proposed in this paper is based on the idea of using the Taylor approximation of a chosen degree of the inverse map as a numerical method for solving (23). T his approach has strong connections with the iterative technique presented in [ 16], which generalizes the Newton-Rapson approach. T he observat ion algorithm derived is characterized by the classical prediction-correction structure, but in this observer the correction term is a polynomial function of the o utput prediction error, whereas standard algorithms have a linear correction term.
T he mai n assumption needed for the construction of the proposed observer is that both funct ionsfand h in ( I) are analyt ic in all [Rn. Well known results of real analysis establish that the composition of analytic fu nctions gives back an analytic function , and that if an analytic function is invertible, then the inverse is analytic too . It follows that the observability map z = 4>(x) defined in (5) is analytic in all [Rn, and that globally observable analyt ic systems admit an analytic inverse x = 4> - 1(=) in all [Rn.

Polynomial Approximation of the IlI rl!ne Ohsen'" hility Map
It is important to stress that the Taylor polynomial approximation of the inverse of the observability map = = 4>(x) can be computed without the explicit knowledge of the inverse function x = <I> - 1(=), by using only the derivatives of <l:>(x). T he mathematical tools needed for the construction of the polynomial Taylor approximation of inverse functions a re described in the Appendix. Using the notations stated in the Appendix, the following derivatives can be defined
(25)
where Go(z) = 4> - I(Z) and GI(z) is the Jacobian \7, 4>-1 (z ). Let
r k = sup II Gk (z) lI . (26) 'ER'
The Taylor theorem states that
" 1 ~-'(-) _ " G (~)( _ ~) Ikl + , ( -~) 'I' .. - {;;ok! k " "' - '" ,,+1 - ,"',
(27)
where the remainder of the series is infinitesimal of order II + I W.r.t. (z - i ) :
IIrHl l1 < (: ~+; ) ! li z - =II H I. (28)
The exponents /kj in the Taylor formula (27) denote the Kronecker powers of matrices and vectors (see Appendix).
Proposition 2: If, 'rip > 0, the sequence r k defined in (26) is such that
I, -.--;,,-r ,~p,k_>c ,m" k_O (k + I)! = 0,
(29)
Ihen <I> - t (z ) is analy tic ill all lRn.
Proof The proof is a straightforward consequence of the inequality (28). •
L,t
Gk(X) = Gk 0 <l:> (x ) = (\71kl ® 4>-1 (Z») , ,,,,"'(x}
and let = = 4> (.\') and x = <l:>-! (z) . Observing d'i ~-'( -) ~-' ( -) - ' G ( - ) -V , ® 'I' Z = '1' Z = x, I.e. OX = x, Taylor formula (27) becomes
(30)
that th,
147
where
Ilr,,+dl < (:~+; ) ! 11 = _ 1> (x) II H! . (32)
Note that r k = su p"ER.IIGt (z) 1I = SUPXER. IIGk(x) ll . The main result proved in the Appendix is that the
sequence of derivatives Gd x) of the inverse function 4> - 1( . ) can be computed as functions of the matrix coefficients h;:(x) recursively defined a s
h ,k = (\7x4» lkl = Qlkl(x ), k = 1, 2, . . .
F h,k = \7.~ 181 F h.k _ 1 + ( \7.~ 4» 181 F h- 1k-1,
h = I · ··k - 1 " , F O.k = O. (33 )
Lemma 9 of the Appendix proves that the seq uence of matrices Gk(X) needed in the Taylor formula (31) can be computed as
Go = x , - -, G , ~ (V' , .. ) ,
Note that
- -J-l G, ~ (V' , <I» ~ Q (x ),
k = 2, 3,···.
(34)
(35)
What is proposed in this paper is a family of observers, whose construction is based on the truncation of the Taylor series (31). Each observer in the family is cha racterized by the degree of the polynomial approximation, and recursively provides at time I an estimate of the past state X(I - /I + I), denoted X(I) . From this, an estimate .\' (1) of the current state is obtained as i (t ) = .f-l(X(t» . The observer starts the operations at a given time to, while the output measurements are available starting from time to _ n + 1· T he observer state is X(I) , whose initial val ue X(to) is an a priori estimate of x(to - II + I). T he recursive equations of the proposed observer a re the following:
Polynomial Observer of degree II
(36)
(37)
k = 2, ... , 11

148
ll.9(1 + 1) = K(Y( / - II+ I) - h(X(/)
+ B,(),(I + 1) - It O/'(X(I ))) ,
" 1 X(I + 1) ~ fix(I)) + I: -k
l g-,(I)~~!y( 1 + 1),
k_ 1 .
.i ( l ) ~ r' (X(I)) ,
(38)
(39)
(40)
Equa tion (40) provides the observed state i (I). In the observer equations, the observability matrix Q(x) defi ned in (2 .2) and the matrix functions Fh,k(x) defined in (33) are needed. Note that Fl.1 (x) = Q(x). The gai n vector K E ]Rn must be chosen such that all eigenva lues or Ah - KCh arc in the open unit circle in the complex plane (Ah and Ch are the Drunowsky pair defined in ( 17».
Remark 3: Comp(/rillg equations (36)-(37~ Il"ill! equaliollS (34) il i.f dear tl!lII the lIIalrice.f 9k(t ) ill Ille SlIlIIlIIalioll (39) are tl!e coefficie/ll s (h of Ihe Taylor approximalioll of Ihe illl'erse lIIap el'lIll/aled III
: =f(X(/» . NOll' also that , II'hellll = I Ihe algorithm (36)- (40) coinddes lI'illt Ihe Ob.lwl'er (24) preselltell ill [/21.
Remark 4: NOle IIIlII ill the obsener eql/{/[ iollS (36) (40) , the ollly IIllItrix irll'er.~e to m' IIlImerically compuret/ at eacI! lime .flep is Ihe illlwse of the obserrllhililY III{/frix Q( . ), emlllllled at fix(l)). in (36), illdepelldently of the order v of Ihe ob.sener. The II/{/frix fUIICliolls Fh .
k(X) (/f each lime slep II/IISt be el'(llll(l/ed at j(X(t)) . COllsidering Ihe dimel/sioll of the matrice.l· ill Ihe SUII/lI/atiOll.l· (37) and (39)
(41 )
It IS easy to see how the complex ity increases by increasing the observer degree . However, the on ly opera tions involved, after the eva luation or the coerficients Fh,k, are simple products :Ind sums of ma trices.
The following theorem provides condi tions ror semiglobal exponential convergence or the observer (36)- (40). For convenience, in the proof the gai n vector Kin (38) is chosen such that a ll eigenva lues of rl h - KCh are real and distinct.
Theorem 3: COlISider Ihe .~y.\'Ielll (I) lind its Ob.I"l'fI'abililY mllp (/('fined in (5). COl/sitler .syslem (36)- (40). "'here K i.s such Ihal all eigen l'lllue.s of Ab - KCb are real alld di.f/illct ill Ihe illler\'{/1 ( - I , I ),
An llme Ihal: Ill": tlte .sy.l'tem ( I ) i.f IIl1iformly globtlll)' Lipschil:
obsefl'able;
A . Gl'rm(Jni (lIId C. M UI"J
111": The fimctiollS f and h (Ire analYlic ill till Rn ami IIniformly Lipschil: iIl JRR, i.e.:
3<, >0, IIIt(x, ) - Io(x,)l1 < 1,lIx, - x, lI, iiXI , X2 E ]RR;
3<! > 0, 11I(x,) - fix,)11 < 1~l x, - x, lI, iix!, X2 E JRR;
(42)
111'. I"e COI1.S/(lIlU r k defined ill eqlllllioll (26) tire .nlell IlitIt: r k < 00, 'r/k EN, and
'r/p> O, lim rkrfkl
= 0. ,~ .
(43)
Then. for (IllY pair of real /II lmbers 0" (llill 8, lI'ilh 0" E (0./) (llId 8> 0, Iltere exisl {III imeger II, Ihe degree of the Oh.I"l'fI"l'f (36)- (40), (llId a I'osilil'e ret/Ill slIch thlll
IIx(l) - .i (I)1I < ,w'-"lIx(I, - " + 1) - x(I,) II, (44)
for al/ pair.s x(to ), X(/o - II + I) E R~ such that II x(I, - " + 1) - x(/,)II < o.
Proof" By assumption 111',' bot h fa nd Ii are analytic ru nctions in a ll JRn, and therefo re the observability milp 4) is analytic in a ll ]Rn. Thanks to the global observability assumption HI',' the runction 41 is invertible and analytic in all Rn, and thererore acts as a global change of coordinates (notc that global analyticity o r (II - 1 is also ensu red by 111'., see Proposition 2). Lct (I ) be the 41-lransformed sta te of the observer (36)- (40), defined by:
ill ) ~ "' (X(I)), (45)
which is an estimate of :(t) = Y(I _ " + I ) (reca ll that : (/) = <11(x(t - II + I»), and defi ne the error in :-coordinates as e(l) = : (/) - =(1). From the observer equat ions (36)- (40), considering the equivalence gA.(I) = Gk(f{X( t))), the upda te law or =(/) takes the rorm
i (1 + 1)
~ "'(fiX (I)) + ~~! G,(f(X ( I ))~~l( 1 + 1)),
(46)
Consider now a sequence £(/) defined by the update law
;(1+ 1) ~ "' (f(X(I))) + ~". ( I + 1), (47)
where ll \J,(H 1 )= K()'( t - n+ I) - h(X(I))) + Bb(y (H I) - ho!'(X(/))) , as defined in (38). ote that, by derinition of the map 41, it is

Polynomial ApproxinllItioll of the Imwse Obsen,,/Jility Map
~ (f(X (t))) ~ A '~ (X( I )) + B. h o/"(X(I)),
and " (X( I» = CbZ(I) .
Thus , recalling (45), it follows
(48)
E(t + I ) = An: (t) + Bn" 0 r(X(I» + .6.x,J. (1 + I )
~ (A. - KC.)i (l) + Kh (X(I))
+ Bbh 0r(X( I» + .6.x,y(t + I )
and, by the definition of .6..\.).(t + I), it is
i(1 + I) ~ (A. - KC,)i (l ) + B.y(1 + I) + Ky(I - I1 + I ) .
(49)
(50)
Now, consider the Taylor expansion of 1>-1 (E( I + I» around 1>{f{X( I» (see eq.(31)):
~- '(i(l+ I» ~j(X(I»
" I + Lk,G,(f(X(I»),,~,\, ( I + I )
k", I .
+ rv+I(1 + I )
= X(I+ I)+ rv+l( I + I ),
(5 1 )
where the remainder r" + 1(1 + I) is such that
(52)
Rewrite equation (51) as
Then
where
e( I + I ) ~ , ( I + I ) - i (1 + I)
~ '(I + I ) - "'(X(t+ I »
~ ,( I + I ) - "'( ~- , (i(1 + I»
- rv+l( 1 + I»
~ '(I + I ) - i(I+ I )
(53)
,
+ (11 ("\7x1>(X»{(J)dS) rv+1{t + I )
(54)
(55)
Now, rewrite (19) for Z(I + I) as follows
z(t + I) = (Ab - KCb)Z(I) + Bby( t + I ) + Ky( t - I1 + I).
Using this and (50) yields
149
(56)
' (I + I ) - i (1 + I ) ~ (A. - KC.)(=(I) - i (I»,
(57)
and using (54)
e{t + I ) = (Ab - KCb)e{t) + ret + I ); (58)
where
r{ I + I) = (11 ("\7x4> (x) ).no{(J) d.\) r v+1 (t + I) .
(59)
By the Uniform Lipschitz Observability assumption lI \7.y4> (x) 11 < 1'<1>, '<Ix E ]Rn, and therefore
11 '(1 + 1) 11 <0. 11 , ,+,(1+ 1)11, (60)
Recalling the bound (52) on r" + 1(t + I), and observing that, from definition (38),
11 " ",,(1+ 1) 11 < o.(lIKII +1/) llx(l - n+ I ) - x(I) 11
< o.( II KII +1/h.-, Iii (I) - '(1) 11
(61 )
it follows
11 '(1 + 1)11 < ~(v)
where
Ile(IJr+' (1/+ I )! '
(62)
(63)
By assumption, K is such that all eigenvalues of Ab - KCb are real and distinct. Let K). denote the gain that assigns a set of eigenvalues A = {A!, ... ,A,,}, and let AMax = max)"' I, .... n{ IIAJ}. Choose A such that AM ax < ct . Let V),. denote the Vandermonde matrix
I A, A"- 1 , V),. = , (64)
I A, A"- 1 ,
which is nonsingular, being Ai #- Ai> i #- j, and such that
(65)

150
It is easy to verify that
A1 K). = -Vii (66)
Note that, being AMU < I. il is .;n < II V1.11 < /I and II K)'II < II VA' Il Jii· Consider the following transformation of the error:
Then
which implies thai :
11 ,,(1 + 1)11 < A""II,,(I)II + 11V,ll lli(l + 1)11 < '\Mu~1I 11( 1 )1I
+ IIV II P( ) II v;:',,(I)II"+' >. v (v + I)!
< A" .. II "(I) II
+11V, 1I1I V;:' II~'P(v) 1~~(2 1 :~:' < "'M Ol + II V~II II V; I UH 1
P( ) 11. (1)11")11' (1) 11 . II (v+ l )! I
(67)
(68)
(69)
Now, choose the degree of the observer v such tha t, for the given a E (0.1) and 6 > 0, it is
(: ':;.+; )! <l1V, 11 11 v;: , II (I I K, II + orh".·, r ' < 6(n - >'Ma ~ ) .
(70)
This inequality can be satisfi ed for a sufficiently large v. thanks \0 the assumption H pJ' From this, thanks to the defi ni tion of P(/I) given in (63), it follows
A +II V II 11 V:- 'II"+'"(v)(11V,lIo. W < . M n ). ). JJ (v+ l)! - u
(7 1 )
It is easy to sec tha t if at a given lime I it is II x(l) - x(, - " + 1)11 < 5. then
11 ,,(1)11 = II V,e(l ) II = II V'(" (X(I - " + I))
- '1'(x(I))1I < II V,Ih.5, (72)
A. GemulII; and C. M alll'S
so that
11, (1)11"+ ' = 11 ,,(1)11"11,,(1)11 < (II V,Ih. WII"(I)II · (73)
From this, thanks to inequality (69) il follows
11 ,,(1 + 1)11 < (A" .. + (IIV, 1111 v;: , II )"+'
P(v) (: O~7;! ) 11,,(1) II, (74)
and thank s to (7 1)
(75)
Thus, being 0 E (0, 1), if at time I it is 11 1J{/)11 < 11V,, 1I1'<f>0. then also at time I + I it is 111J{t + 1)11 < 11V,,1I1'<f> 0. Therefore, if lit 10 II x ( /o ) - x{to - II + 1)11 < 0, then 11 ,/(10)11 < 11V,,1I1'$0, and thanks to (75)
(76)
This implies
(77)
'nd. be;ng e(l ) = 1I ~> (x( 1 - ,, + I)) - <I« x(lllil. ;t follows
11 -'(1- " + 1)- x(I)1I < 0-
1-
101"1>1' ... III V"IIII l/i1 1lIlx(to - II + I) - x(/o)lI·
(7S )
and fimilly
11 -'(1) - _'( ')11 < u'-'"or-'o.o •. , II V, II II V,' II 11 -'(10 - " + I) - x( lo) ll , (79)
which is the thesis (44),
II V,IIII V,' II.
4. Simulation Results
with
The polynomia l observer (36)- (40) has been tested on many systems. In genent l, the theoretica l convergence results have been confi rmed by the simulation tests. Here. some results concerning a chaos synchronization problem have been presented.
Consider the well known Helloll map [20]
(SO)

Polynomial Approximation of the Imw se O/Jserl'ahility Map
which, for some values of the parameters a and b, defines a discrete time chaotic system. The canonical values of the parameters of the Henon map are (/ = 1.4 and b = 0.3 , which produce a chaotic behavior of the system.
The polynomial observer (36)- (40) has been applied to the problem of estimating the state of the Henon system when the constant pa rameter b is unknown. Only the first state variable X1(1) is assumed to be measured. T his problem is known as a ('haos synchronizalion prob/ell/ wilh uncertain paramelers (see ,. g. [IS], [25]).
The unknown parameter b is modeled as a constant state variable, i.e. X3(t + I) = X3(1) = h. The system eq ua tions considered for the observer construction are the following
x I( I + I)
X2 (1+ 1)
xJ( I + I)
I - 1.4xi( l) + X2( 1)
XI( I)XJ( /)
XJ( I)
y( I) = XI.
(81 )
The polynomial observers of orders v = 1,2, 3 and 4 have been applied. The matrix functions Fh.k(x), defined in (33), where k = 1, .. . , 4 and II = I, ... k, have been computed using the symbolic toolbox of MATLABCl, by reproducing exactly the recursive computations in (33).
The map q:. is as follows:
"' (x ) ~ 1 - 1.4( 1 - 1.4xf + xd + XJXI
1 - I.4xi+ X2 XI
(82)
7.84( 1 - 1.4xi + X2)XI + xJ - 2.8x l
I
- 32.928xi + 7.84 + 7.84x2 - 2.800
o
7.84x l o o
In matrix FI.3(x) the only nonzero elements are [Fu lLl = - 65.856xI and [Ful1.2 = [Ful l.4 = [Fu ll.lo = 7.84. Matrices Fh_~ for II > 1 are rather big sparse mat rices, and can not be easily reported. Note that matrices Fu can be computed as f r ll (see (33)).
The gain mat rix used in the simulations here reported is the following
K ~ [- 0.0017 0.0428 - 0.)600 J, (85)
lSI
" ,--~------~-----,
.,
-LS~" ---c,'---'"'.---"" ----,-, >l,.
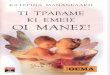
Fig. I. True and observed variable Xl.
and is such to assign eigenvalues AI = 0.1, A2 = 0. 12 and A3 = 0. 14 to the Brunowsky pair (A h. Ch) of dimension n = 3. The Figs 1- 3 report simulation results where all observers fo r v = 1, 2, 3 and 4 provide convergent state estimates. T he true and observed initial states are
x(O) ~ [ - 0.6
.,(0) ~ [ - 0.3
- 0.1 0.3] T
- 0.2 0.2( (86)
It can be seen that higher order observers produce faster transients.
In many cases, the first order observer does not converge, while higher order ones are con vergent. For instance, when the initial states are as follows
x(O) ~ [ - 0.6
.,(0) ~ [0 0
- 0.1 0.3] T
0.2[T, (87)
- 2.8 + 3.92xi - 2.8x2 XI 10 (83)
I o o
o 0
7.840x l o o
- 2.800 0 1 o 0 0 o 0 0
o o o
o o o
the first order observer does not converge.
S. Conclusions
(84)
A new technique for the observer construction for analytic discrete-time nonlinear systems has been presented in this paper. The method is based on the Taylor

152
'. • .-, , tv 0.' • , • 0.' • ....
o
-<u
, Fig. J . True and observed variable XJ (the constant parameter).
polynomial approximation of the inverse of the observability map. The degree II chosen for the approximation is the most important design parameter of the observer. Thanks to the analyticity assumption, it is shown that the degree II can be suitably chosen to ensure the error convergence at any desired exponential rate, when an upper bound for the norm of the initial observation error is assigned (semiglobal exponential convergence of the observation error). The resulting observation algorithm has a prediction -correction structure, where the correction term is a polynomial function of the output prediction error. It must be noted that when II = I the proposed o bserver coincides with the one presented in [12] . Com puter simulations support the theoretical convergence results.
Acknowledgment
T his work is supported by M iUR ( Italian Mi nistry of Universi ty and Research) and by eN R (National Resea rch Council of Italy).
A. Germani und C . '\({III('.1
References
I. Aitken VC, Schwartz HM. On the exponential stability of discrete-time systems with applications in observer design. IEEE Trans All/om COIl/rol 1994; 39: 1959- 1962.
2. Anderson BOO, MooreJ B. Op/ill/al Filterillg. PrenticeHall , Englewood Cliffs: New Jersey, 1979.
3. Besam;:on G , Hammouri H, Benamor S. State equivalence of discrete-time nonlinear control systems to state affine form up 10 input/output injection. Sysl COlllrol LI'II 1998; 33: 1- 10.
4. Boutayeb M, Rafaralahy H, Darouach M. Convergence analysis of the extended Kalman filter used as an observer for nonlinear deterministic discrete-time systems.IEEE Trails Allioll! Conlro11997; 42: 581 - 586.
5. Boutayeb M, Aubry D. A strong tracking extended Kalman observer for nonlinear discrete-time systems. IEEE Trans All/om Con/roll999; 44: 1550- 1556.
6. BOUlayeb M, Darouach M. A reduced-order observer for non-linear discrete-time systems. 5YS I Conlrol Lell 2000; 39: 141 - 151.
7. Califano C. Monaco S, Normand-Cyrot D. On the observer design in discrete-time. Sys/ COIl/rol Lei/ 2003; 49: 255 - 265.
8. Carravella F, Germani A, Raimondi M. Polynomial filtering for linear discrete-time non-Gaussian systems. SIAM J COIl/rol Op/im 1996; 34: 1666- 1690.
9. Carravella F, Germani A, Raimondi M. Polynomial filtering of discrete-time stochastic linear systems with multiplicative state noise. IEEE TrailS Aulom COIl/rol 1997;42: 1106- 1126.
10. Chung ST, Grizzle JW. Sampled-data observer error linearization. All/ollla/ica 1990; 26, 997- 1007.
II. Ciccarella G , Dalla Mora M. Germani A. A Luenbergerlike observer for nonlinear systems. Inl J COlllroll993; 57: 537- 556.
12. Ciccarella G , Da lla Mora M, Germani A. Observers for discrete-time nonlinear systems. 51'.1'1 Conlrol Le1l1993; 20: 373 - 382.
13. Ciccarella G. Dalla Mora M, Germani A. A robust observer for discrete time nonlinear systems. 5)'.1'1 Conlrol Lell 1995; 24: 291 - 300.
14. Dalla Mora M, Germani A, Manes C Design of state observers from a drift-observability property. IEEE TrailS AU/OIII ConlroI2000; 45: 1536- 1540.
15. De Angeli A, Genesio R, Tesi A. Dead-Beat chaos synchronization in discrete-time systems. IEEE Trans Cireuils Sys/I , Fum/all! Theory Appl6; 1995; 42: 54.
16. Germani A. Manes C, Palumbo P, Sciandrone M. A higher order method for the solution of nonlinear scalar equations. J Oplim Theory Appl2oo6; 131: 347 - 364.
17. Germani A, Manes C. An exponential observer for discrete-time systems with bilinear drift and rational output functions. Proceedings of the European Control Conference, 2007, 5777- 5782, Kos, Greece, 2007.
18. Germani A, Manes C, Pal umbo P. Polynomial extended Kalman filter. IEEE Trulls Alliom COlllrol 2005; 50: 2059- 2064.
19. Germani A, Manes C. The polynomial extended Kalman filter as an exponential observer for nonlinear discrete-time systems. Proceedings of the 47th IEEE Conference on Decision and Control (CDC08), Cancun, Mexico, 2008.

Polynomial Approximation of the Imwse Ohse,.-ahility Map
20. Henon M. A two-dimensional mapping with a strange attractor. Commull Malh Phy 1976; 50, 69-77.
2 1. Graham A. Kronecker Producl.\" alld ,\fa/rix Calculus lI"ilh Applications, Ellis Horwood: Chichester, 1981.
22. Kazantzis N, K ravaris C. D iscrete-time nonlinear observer design using functional equations. Sysl Conlrol LeI! 200 1; 42, 81-94.
23. Lee W. Nam K. Observer design for autonomous discretetime nonlinear systems. Sysl COlllrol LeI! 1991: 17: 49-58.
24. Lin W, Byrnes C I. Remarks on linearization of discretetime autonomous systems and nonlinear observer design. Sysl COlllrol LeI! 1995: 25: 31-40.
25. Millerioux G , Daafouz 1. Global chaos synchronization and robust filtering in noisy context. IEEE Tums Circuil.,· 5)".'·11, Fumlalll Theory App! 2001: 48(10): 1170- 1176.
26. Monaco S, Normand-Cyrot D , Barbot J P. Observers for differential-difference representations of discretetime systems. Proceedings of the European Control Conference 2007, 5783-5788, Kos, Greece, 2007.
27. Moraal PE, Grizzle JE. Observer design for nonlinear systems with discrete-time measurements. IEEE Trull.'· Alliom COlllro1 1995; 40: 395-404.
28. Reif K, Unbehauen R. The extended Kalman filter as an exponential observer for nonlinear systems. IEEE Trulls Signal Process 1999: 47, 2324-2328.
29. Song Y, Grizzle lW. T he extended Kalman filter as a local asymptotic observer for discrete-time nonlinear systems. J Math Syslems ESlimale Conlroll995; 5, 59- 78.
30. Xiao M, Kazantzis N, K ravaris C. Krener AJ . Nonlinear discrete-time observer design with linearizable error dynamics. IEEE Trail\" Alliom ConlroI2003; 48: 622-626.
31. Xiao M.A direct method for the construction of nonlinear discrete-time observer with linearizable error dynamics. IEEE Tram AulOlIl Conlrol 2006; 5 1: 128-135.
32. Zemouche A, Boutayeb M. Observer design for lipschitz nonlinear systems: the discrete-time casco IEEE Trulls Circuils SYSI II , Erpress Brief~ 2006; 53: 777 - 781.
Appendix
Polynomial Approximationof Inverse Mappings
This append ix describes the mathematical tools of the Kronecker algebra , used in this paper to represent the formulas of the Taylor series of vector functions of several variables and of their inverse functions. Here, the symbol I" denotes the identity matrix in IR"xn .
The Kronecker product of two matrices M and N of dimensions p x q and r x .I" respectively, is the (p , r) x (q . .\") matrix
(88)
II1pl N
153
where the lIJij are the entries of M. The Kronecker power of a matrix AI is recursively defined as
Note that if M E IRpxq, then Mltl E IRJfx q' . Some useful properties of the Kronecker product are the following:
(A + B) 0 (C + D) ~ A 0 C+ A 0 D + B 0 C
+ B 0 D
(90)
A 0(B 0 C) ~ (A 0 B)0 C (91 )
(A· C) 0 (B· D) ~ (A 0 B) · (C 0 D) (92)
d,,(A 0 B) ~ d" (B 0 A) (93)
Repeated application of the properties (91) and (92) provides the identities
(AB)lt1 = A ['1Bl'1 and (A[k[) -I = (A- I)[k[ .
(94)
Using (92), given A E IRnxn and B E IR"'x"" the following properties can be easily derived
(A 0 B)-I = A-I 0 B- 1, (95)
From the last, thanks to (93), it follows det(A 0 B) = det(A 0 /",) det{ln 181 B), Using (93) it is det (fn 0 B) = det (B 181 In) . Recognizing the block diagonal structure of I", 0 A and of In 0 B it follows
d'I(A 0 B) ~ (d'I(A)nd'I(B))" . (97)
A quick survey on the Kronecker algebra can be found in the Appendix of [9] . See [21] for more properties.
The Kronecker formalism is also useful for representing derivatives of mat rix functions of several va riables, and provides a compact notation for the Taylor polynom ial approximation of nonlinea r vector functions, Let M (x) be a smooth matrix function of x E IRn, i.e.: AI : R.n_R.'xc, and let 'Vx ® AI: IRn_R.,xnc denote the following matrix of derivatives:
(98)

154
This m.llrix Jacobian is a [onn,,] Krone(;ker product of the vecto r '\7x = [Oj O.\"1 ... Oj8x,,] with the matrix M (x). Repeated derivatives can be recursively defined as
\7.~I® M = M , V'~+ l ) ® M = '\7 x ® ( \7.~ ® AI), i > I.
(99)
leI :F : IR" --0 Rm be a smooth nonlinear map. In this case \l x ® F is the standard Jacobian of F , and therefore throughout the paper the following symbols will be indifferently used
dF \l.r ® F = -I = '\1.,F.
<X ( 100)
The last symbol provides the most compact notalion. Note that for matrix functio ns the use of V'x® is necessa ry.
A usefu l property of the operator \1.< is the following:
'7., ® (A (x ) . B(x)) = ('7., ® A) (I" ® B)
+ A ('7., ® B),
where A and B are generic matrix functions.
( 10 I)
Let F (x ) and 11(=) be functions :F : R"_IR" and H : IR" --+ R,xr. The composition /J 0 F : R" --+ lR: u
is defined as
11 0 F (x ) = I1(F (x )) . ( 102)
Proposition 4: If /1(::) and F ( x ) are (lifJeremiab/e. Ihell
'7x ® (11 o f ) = « '7, ® 11) 0 F )( '7xF ) ® I,) . (103)
where Ihe lerm
(104)
dellOle,\' Ihe deril'alil'e of H lI'.r .l. z compuln/ at :;: =
F (x }.
Proof Observe that
'7,®(l1 o F ) = [D(11 0 F ) Ox.
D(~:.F) l , ( 105)
A. Gl'rm(mi allJ C. Mw" s
and that
= « '7, ® Ii) 0 F )
OF" Ir OXI
= « '7, ® Ii) o f ) (~~ ® I) ( 106)
Substitution of this into the right hand side of ( 105) provides equation (103).
Throughout the paper, the symbol S.~.(p) will denote the open ball of rad ius p centered at Xo E R", i,e , S,ro(P) = {x E R" : IIx - xo ll > p}, The symbol Sxo( p) will denote the closure of Sx.(p).
Using the Kronecker nota tion. the Taylor T heorem fo r vector r unctions of several variables can be written as follows:
Theorem 5: Lei F : R.n --+ R.nI he (/ f UIIC/ioll defined 011 the dosed ball, Sxo (p) Jor .\'OIIIe Xo E R." (II/(/ P > O. IfJor a gil'ell integer v, all deriI'(Jlil'(!.~ \7~1 ® F , k = I , ... , v + I , exi,ft ami are COlllimlOl/.s (l/ erery poillt of sx.( p) . thell the f ollOiring it/emity hoM.sfor ( I II x E S.~.(p):
" I F (x ) = {; k' ('7~1 ® F (x ) t. (x - xo)~1
+ RH I(X,XO )(x - xO)l"+II,
( 107)
where Ihe remaillder satisfies Ihe inequality
Thefilllctifm F i.f .mid 10 he anlllYlic ill the set S_~o(P) if the Tay/or serle.s is cOIII'ergent Jor aI/ x E S~(Jp) .
Defining
~,(xo, p) = '"P 1I '7.~1 ® F (x)ll, xd",,(p)
( 109)
II slIJficien' condilioll Jor the llnalyticity of :F ill S~,,( p) i.\' the followillg
I' <Pk (XO, p) - 0 1m k l - '
k_oo . (110)

Polynomiul Approximation of the Imw.\'e OiJ.\'en'aiJility Map
Theorem 6: Let F: IRN ....... IRn be a smooth fUllctioll
de filled 011 (III IRn. If, for any choiL·e of Xo E IRn alld of p E IR + the sequellce 'fiIJ X() . p) defined ill ( 109) i.l" such that
I· rpk(XO, p)pk _ 0 ,m k' - , k _oo .
( I I I )
then F i.l" allaly tic ill aI/ [Rn .
Proof The proof is a direct consequence of the remainder expression (108) .
Let F - 1: IR/I --" IR/I denote the inverse map of the function F , i.e.
( 11 2)
so that F - 10 F is the identity map in IR/I: F -l(F (x )) = x. Let us define the following notation for the derivatives of the inverse funct ion F - 1:
A useful equivalent recursive definition is
90(z) ~ r '(z) ,
91:+1(Z) = "\7: 0 9k(Z), k = 0, I , ... , (114)
Lemma 7: The deril'atil'es of the im·er.l·e mapping F - I. i.e. the matrix fUI/("/iol/.l· 9dz ) . k = 1.2 . ... . de filled ill equation (J 13), satisfy the followillg chaill of identities:
where
(91 0 F )Fl.l = I" ,
, 2)9h 0 F )Fh•k = 0, k = 2, 3, ... , .. , Fu = ( "\7xF )lkl, k = 1,2, ...
Fh,k = \7.~ 0 Fh,k_l + ("\7x F ) 0 Fh_l,k_l,
h = I , ... ,k - l ,
FO,k = O.
( 11 5)
(116)
( 11 7)
Proof The property {91 0 F )Fl.l = I", with F,.l = \1.,. F, it will be proved in Lemma 8. From this
(118)
The computation of the derivative, using ( 10 1), gives
V' , 10«9 , of )Fu ) ~ (9, of)(V' ,F 10 /,) (1, ®F", )
+ (91 o f ) ("\7x 0 Fl,l) = 0.
(119)
155
From the property (A 0 B)(C0 D) = (AC)0 (CD) it follows
("\7xF 0 In){ /" 0 Fl.l ) = \7xF 0 Fl,l = (\7xF )12]
= F2.2 ·
(120)
Moreover, from ( 117) , it is F L2 = \1x0 Fu. Therefore equation (119) can be written as
(92 0 F )F2.2 + (910 F )F1.2 = 0, (121 )
so that (1 16) is proved for k = 2. T he identity ( 11 6) for k > 2 will be proved by induction. T hen, assume that (I [6) holds fo r some k > 2, and prove that it holds also for k + 1. If (I [6) is true, then
(122)
Different iating, and using (10 1), yields
, L (9.+, 0 F )« V' ,F ) 10 /~)( /, 10 F. ,' ) ;. , (123)
+ (9. 10 F )(V' , 10 F. ,,) ) ~ 0,
Reorga nizing the subscripts one gets
(9 .. ,0 F )( V' ,F ) 10 /~) (I, 10 F,,) , + L (9. 0 F )(V', 10 F."
that can be rewritten as
,+, L (9h 0 F )h .1:+1 = 0, h d
where
h+l,J.:+ l = ( {\7xF ) 0 / ".. ) {In o Fk,k),
(124)
(125)
Fh.k+l = \7x 0 Fh.k + (( \7xF ) 0 1nJ'-') (I" 0 Fh- l.k),
I < h < k .
(126)
Exp[oiting the property (A0 B)(C0 D) = (AC)0 (BD)
h+l.k+l = (\7x F ) 0 h .k,
h ,k+ l = \7x 0 Fh,k + ("\7xF ) 0 Fh- l.k, (127)
I < h < k .

156
Considering that Fu = v.,-F, it follows h+ Lk+1 = l 'VxF )[k+JI. The comparison with (117) shows that F h,k = F h,k. for all pairs h.k, and therefore
,+, 2..: (9h oJ )Fh,k+1 = o. ( 128) ,.,
T his equation completes the induct ion and concludes the proof.
Lemma 8: The deriWi/ives of the illl'crse mapping F - I ( ;: ) computed ill :: = F (x ) satisfy the follo wing chaill of idel/li/ie.l"
( 129)
9"'+1 0 F = ('\7~ (0 (9 .. 0 F »)( (91 0 F ) 0 I",,) .
( 130)
Proof Since F - I 0 F is the identity map, then \7x(F- 1
0 F ) = I" . From this, using the chain rule
V ,(r' o f ) ~ ((V , r ')o F )('J,F )
~ (9, 0 F )('J,F ) ~ I" , ( 13 1 )
and therefore equation (129) is proved. Since for any d ifferentiable matrix funct ion H ( z) ,
H : !Rn i-l' IR'xc it is
V," (H 0 F ) ~ ((V ,,, H ) 0 F )((V ,F ) " I,),
( 132)
see Proposition 4, it follows
V, " (9, 0 F ) ~ ((V , ,, 9,) 0 F )(('J,F ) " I~)
= (9k+1 0 F )( (91 0 F )- I 0 /",,) .
( 133)
From this
9 k+1 0 F = ('V x \0 (~h 0 .1"»)( (910 .rT ' 0 /,..)-1.
( 134)
T hanks to property (95) it is
( 135)
and the theorem is proved.
LOi
g,(x ) ~ 9, 0 F (x ) ~ (V\" " r '('» " FI,j. ( 136)
Note that 9o ( z) = F- I (z) and that 9 a{x ) = x. Denoting z = F(x) and £ = F {i ), the Taylor series expansion of F - 1(.:) around the point £ can be written as
A. Germani and C. Mlllles
(137)
R ( - -)( - .)'"+" + ~+ I .. , z .. - z .
It is .known. that if F is. analytici in a set SX1{~) and
admits the Inverse function F ,then F IS analytic too. The coefficients 9 d xo) of the Taylor series expansion of F - I(Z) around a point -"0 = F(xo) can be recursively computed using the algorithm of Lemma 8, without the ex plicit knowledge of a closed form of F -I (z). However, the computations involved in the iterations require the derivatives of inverse mat rices (consider for instance 02 = {\7x 0 (\7xF )-I ) {{\7x.rrl 0 1,,)).Jhe following Theorem shows that the coefficients 9 k can be computed without the differentiation of inverse mat rix functions.
Lemma 9: The malrix fUl/cliol/s 9 k : lRn 1-+ lRnx'"
de filled ill ( 136) call he recurshely compllied as follows:
9 a= x , . ., 9, ~ ('V,F ) ,
( 138)
where Ihe lIIatrix wefficiellls Fh).: are remrsiveiy (·ompuled as
Fk): = (\7x F )[k1, k = 1,2, ...
F h): = \7x 0 Fh ):_ 1 + (\7 xF ) €I F h_ l.k _ t,
h = l, . . . ,k - l ,
Fa): = O. ( 139)
Proof" T he proof is a direct conseq uence of Lemma 7. Equations (138) are simply derived from the identities ( 11 5)- (1 16), proved in Lemma 7. In particular, rewrite (1 16) as
k -I
9kFk,k + L 9kFh.k = 0, ( 140)
Solving this equation fo r 9hark and considering that, than ks to (94)
(F, .• )·' ~ ((V,F )'·')·' ~ ((V ,F )·' )'" ~ g\" , ( 14 1 )
gives back the equations (138).
Remark 5: Theorem 9 shows Ihat, gil'ell all allalylic fllll clion F : 1R" 1-+ IRn
, lI'ilh lIolisiligular Jacobiall \l xF at a gil'ell Xo E IR" , Ihe coefficielll of Ihe Taylor series expallsioll of Ihe illrerse fill/clioll F - I arolllld =0 = F ( xo) exiSls and call be re(·lIr.l·h·ely compuled as fill/Cliolls of Ihe derivalives of Ihe direcl map F compUled at Xo, as long a.l· \l xF(xo} is lIol/siligular.