Embed Size (px)
Citation preview

705Wiadomości Konserwatorskie • Conservation News • 26/2009
Praca dopuszczona do druku po recenzjach Article accepted for publishing after reviews
NAUKA SCIENCE
1. Organizacja
i cele projektu
W odpowiedzi na uprzejme zaproszenie CentrumArcheologii årÛdziemnomorskiej w Polsce zespÛ≥Laboratorium Skanowania i Modelowania 3D (Lab-Scan3D) i Leica Geosystems Polska wziπ≥ udzia≥w marcu 2009 r. w polsko-egipskiej misji archeolo-giczno-konserwacyjnej do úwiπtyni Hatszepsutw Deir el-Bahari1 i rozpoczπ≥ pilotaøowy projektskanowania 3D. W zespole pracujπcym na miejscuznaleüli siÍ Waldemar Kubisz z Leica GeosystemsPolska i Jacek Koúciuk z LabScan3D. ZespÛ≥ otrzy-ma≥ takøe pomoc przedstawicieli Leica Geosystemsw Egipcie i oraz £ukasza Øaka Instytutu Geodezjii Kartografii, ktÛry wykona≥ osnowÍ geodezyjnπsk≥adajπca siÍ z 31 punktÛw referencyjnych.
G≥Ûwnym celem projektu by≥o sprawdzeniemoøliwoúci i przydatnoúci najbardziej zaawanso-wanych metod pozyskiwania danych przestrzen-nych i wizualnych do dokumentacji GÛrnego Ta-rasu úwiπtyni Hatszepsut w Deir el-Bahari. Na pod-stawie aktualnego planu pracy misji, do skanowa-nia wybrano dwa obszary ñ tak zwany KompleksKrÛlewskiego Kultu Poúmiertnego w po≥udniowejczÍúci tarasu i Kompleks Kultu S≥oÒca po jegoprzeciwnej, pÛ≥nocnej stronie. Dodatkowo, dwauzupe≥niajπce stanowiska skanowania w úrodkowejczÍúci GÛrnego DziedziÒca ≥πczy≥y ze dane z obukompleksÛw. W sumie projekt obejmowa≥ 33 sta-nowiska skanowania, pokrywajπce w ca≥oúci wy-brany obszar badaÒ.
1. Project organization
and its objectives
Following the kind invitation from the Polish Cen-tre of Mediterranean Archeology, a team of Labo-ratory of 3D Scanning and Modeling (LabScan3D)and Leica Geosystems Poland joined in March 2009the Polish-Egyptian Archeological and Conserva-tion Mission at the Hatshepsut Temple in Deir el-Bahari1 and lunched a pilot 3D scanning project. Thefield team consisted of Waldemar Kubisz from Lei-ca Geosystems Poland and Jacek Koúciuk fromLabScan3D. Additionally the team was backed upby local Leica Geosystems representative fromEgypt and £ukasz Øak ñ from the Institute of Geod-esy and Cartography who established on the fielda network of 31 reference points.
The main aim of this test was to check abilitiesand suitability of the most advanced methods ofspatial and visual data collection for documentingthe Upper Terrace of the Hatshepsut Temple in Deirel-Bahri. According to the current working plan ofthe Mission, two areas of the Upper Terrace has beenchosen for scanning ñ the so called Complex of theRoyal Mortuary Cult located at the southern part ofthe terrace and the Complex of the Sun Cult situat-ed on the opposite northern part of the area. Addi-tionally, two supplementary scanner positions hasbeen added on the central area of the Upper Court-yard to combine both the complexes. All together,the project ended with 33 scanner positions fullycovering the both main areas in question.
3D scanning and modeling of the upper terraceof the Hatshepsut Temple in Deir el−Bahari as an exampleof architectural heritage documentation for restoration purposes
Skanowanie i modelowanie 3D górnego tarasu świątyniHatszepsut w Deir el−Bahari jako przykład dokumentacjidla celów konserwatorskich
Jacek Kościuk*

706 Wiadomości Konserwatorskie • Conservation News • 26/2009
Ca≥y projekt sk≥ada≥ siÍ z dwÛch faz ñ skanowa-nia, ktÛre zajÍ≥o 5 dni roboczych, a nastÍpnie doku-mentacji skanowanych wczeúniej úcian za pomocπzdjÍÊ cyfrowych wysokiej rozdzielczoúci. Ta drugafaza trwa≥a 2 tygodnie. Juø jednak po pierwszymtygodniu pracy na miejscu zespÛ≥ by≥ w stanie przed-stawiÊ pierwsze wyniki, ktÛre omÛwiono na dwÛchwyk≥adach w Muzeum Mumifikacji w Luksorzei w Polskim Centrum Archeologii årÛdziemnomor-skiej w Kairze. Te wstÍpne wyniki by≥y takøe pre-zentowane w czerwcu 2009 r. podczas dorocznejkonferencji ìPolacy nad Nilemî na UniwersytecieWarszawskim. Dalsze opracowanie zebranych w te-renie danych wykonywano juø w LabScan3D. Cho-ciaø proces ten nie jest jeszcze w pe≥ni ukoÒczony,przyniÛs≥ on wiele ciekawych obserwacji, ktÛre sta-nowiπ przedmiot niniejszego artyku≥u.
2. Sprzêt
Podstawowym elementem wyposaøenia uøywane-go w terenie by≥ skaner Leica HDS 6000 uøyczonyprzez Leica Geosystems2. Specyfikacja technicznaskanera Leica HDS 6000 jest nastÍpujπca:ñ typ urzπdzenia ñ skaner fazowy z pe≥nym polem
widzeniañ pole widzenia (na skan) ñ w poziomie 360∞ (mak-
simum), w pionie 310∞ (maksimum)ñ zasiÍg ñ 79m @90%; 50 m @18 % albedoñ prÍdkoúÊ skanowania ñ maksymalnie do 500.000
pkt./sekñ czas skanowania (pe≥na panorama) ñ wstÍpny wi-
dok: 25 s; úrednia rozdzielczoúÊ: 1 min 40 s; wy-soka rozdzielczoúÊ: 3 min 22 s; bardzo wysokarozdzielczoúÊ:6 min 44 s; ultra wysoka rozdziel-czoúÊ: 26 min 40 s
ñ rozdzielczoúÊ skanowania przy odleg≥oúci 10 mñ 1,6 mm dla ultra wysokiej rozdzielczoúci
ñ rozdzielczoúÊ skanowania przy odleg≥oúci 50 mñ 7,9 mm dla ultra wysokiej rozdzielczoúci
ñ dok≥adnoúÊ pojedynczego pomiaruñ po≥oøenie: 6 mm (zasiÍg 1 m do 25 m)
10 mm (zasiÍg do 50 m)ñ odleg≥oúÊ ≤ 4mm przy 90% albedo przy 25 m
≤ 5mm at 18% albedo przy 25 m≤ 5mm at 90% albedo przy 50 m≤ 6mm at 18% albedo przy 50 m
ñ kπt (H/V) ñ 125 µrad/125 µrad, 1 sigmañ dok≥adnoúÊ modelowanej powierzchni ñ 2 mm
przy 25 m; 4 mm przy 50 mñ dok≥adnoúÊ rejestracja tarcz celowniczych ñ
2 mm odchylenia standardowegoñ skupienie wiπzki ñ 3 mm na wyjúciu; 8 mm
@25 m; 14 mm @50 m
The whole project consisted of two phases ñ scan-ning, which took 5 working days and following it,recording of all the previously scanned walls on highresolution digital pictures. This second phase lastedfor 2 weeks. However, already after the 1st week ofthe field work, the team was able to show up withfirst results which has been displayed during two lec-tures held at the Museum of Mumification in Luxorand at the Polish Centre of Mediterranean Archeolo-gy in Cairo. Further presentation of these prelimi-nary results took place in June 2009 in Warsaw dur-ing conference ìPolacy nad Nilemî which is annual-ly held at Warsaw University. Further data evalua-tion took place at LabScan3D and although not fullyfinished, jelled with many interesting observationswhich are main subject of this paper.
2. Hardware equipment
The core item of the equipment engaged on the fieldwas Leica HDS 6000 scanner kindly provided byLeica Geosystems2. The technical specification ofLeica HDS 6000 scanner is as follows:ñ instrument type ñ phase-based, scanner with full
field-of-viewñ field-of-view (per scan) ñ horizontal 360∞ (max-
imum), vertical 310∞ (maximum)ñ range ñ 79m @90%; 50 m @18 % albedoñ scan rate ñ up to 500,000 points/sec,
maximumñ scan time (full dome) ñ preview: 25 sec; middle
resolution: 1 min 40 sec; high resolution: 3 min22 sec; super high resolution: 6 min 44 sec; ultrahigh resolution: 26 min 40 sec
ñ point spacing at range 10 m ñ 1.6 mm at ultrahigh resolution
ñ point spacing at range 50 m ñ 7.9 mm at ultrahigh resolution
ñ accuracy of single measurementñ position: 6 mm (1 m to 25 m range)
10 mm (to 50 m range)ñ distance ≤ 4mm at 90% albedo up to 25 m
≤ 5mm at 18% albedo up to 25 m≤ 5mm at 90% albedo up to 50 m≤ 6mm at 18% albedo up to 50 m
ñ angle (H/V) ñ 125 µrad/125 µrad, 1 sigmañ modeled surface accuracy ñ 2 mm at 25 m; 4 mm
at 50 mñ target acquisition ñ 2 mm std. deviation
ñ scan resolution ñ spot size 3 mm at exit; 8 mm@25 m; 14 mm @50 m

707Wiadomości Konserwatorskie • Conservation News • 26/2009
ñ waga urzπdzenia ñ 14 kg (w≥πcznie ze zintegro-wanπ bateriπ); 2,5 kg zasilacz; ok. 24 kg wagaca≥oúci w skrzyni transportowej.Do fotografii cyfrowej uøyto kamery FujiFilm
S5 Pro z kalibrowanym3 zestawem obiektywÛw od8 mm (rybie oko) do 55 mm dostarczonych przezLabScan3D wraz ze wszystkim adapterami potrzeb-nymi, aby po≥πczyÊ kamerÍ ze skanerem HDS 6000.RozdzielczoúÊ kamery wynosi≥a 12 mln pikseli.
ñ instrument weight ñ 14 kg (includes integratedbattery); 2,5 kg AC Power Supply; ca. 24 kg ship-ment weight in the transportation box.For digital photographing FujiFilm S5 Pro with
calibrated3 set of lenses ranging from 8 mm (FishEye) to 55 mm has been supplied by LabScan3D,together with all adaptors necessary to combine thecamera with HDS 6000 scanner. The camera reso-lution is 12 mln of pixels.
3. Oprogramowanie u¿yte w projekcie
Proces skanowania oraz przetwarzania wszystkichdanych oparto o zestaw oprogramowania LeicaCyclone. Do opracowania danych i zestawieniawynikÛw uøyto Bentley MicroStation (g≥Ûwna plat-forma CAD w LabScan3D) oraz Bentley Descartes(do przetwarzania danych rastrowych). Poza tymzastosowano PTGui Pro do ≥πczenia obrazÛw z ka-mery w panoramy sferyczne i odwzorowania wal-cowe rÛwnoodleg≥oúciowe (tzw. obrazy equirectan-gluar), oraz Panotools ñ niezbÍdny dodatek doPTGui. Z kolei Pano2QTVR Gui uøywany by≥ dokonwersji odwzorowaÒ walcowych na tzw. CubeMaps, ktÛre w úrodowisku Leica Cyclone, pozwa-la≥y wprowadziÊ do chmury punktÛw informacjÍo wartoúciach RGB. Wszystkie licencje na oprogra-mowanie dostarczy≥o LabScan3D.
W ostatniej fazie projektu przetestowano inny ze-staw oprogramowania, aby znaleüÊ najlepsze narzÍ-dzia modelowania powierzchni úcian oraz przekrojÛw
3. Software used in the project
The scanning process as well as processing allthe recorded data has been govern by Leica Cy-clone software set. Bentley MicroStation (themain CAD platform at LabScan3D) and BentleyDescartes (for raster data manipulation) were usedfor further data evaluation and deliverables pro-duction. Additionally, PTGui Pro was used forstitching the camera images into spherical andequirectangluar images, as well as Panotools ña necessary plug-in for PTGui. Pano2QTVR Guiwas used for conversion of the equirectangluarimage into Cube Maps which were ported to Lei-ca Cyclone to supply the point cloud with colorRGB information. All the software licenses wereprovided by LabScan3D.
During last phase of the project another set ofsoftware has been tested in order to find best toolsfor modeling walls surfaces and sections (verticaland horizontal) production. For this purposes JRC
Rys. 1. Skaner Leica HDS 6000 ustawiony na spodarceFig. 1. Leica HDS 6000 scanner mounted on tribrach
708 Wiadomości Konserwatorskie • Conservation News • 26/2009
pionowych i poziomych. W tym celu uøyto oprogra-mowania JRC 3D Reconstructor oraz 3D ReshaperudostÍpnionego do testÛw przez firmÍ Technodigit.
4. Przebieg prac
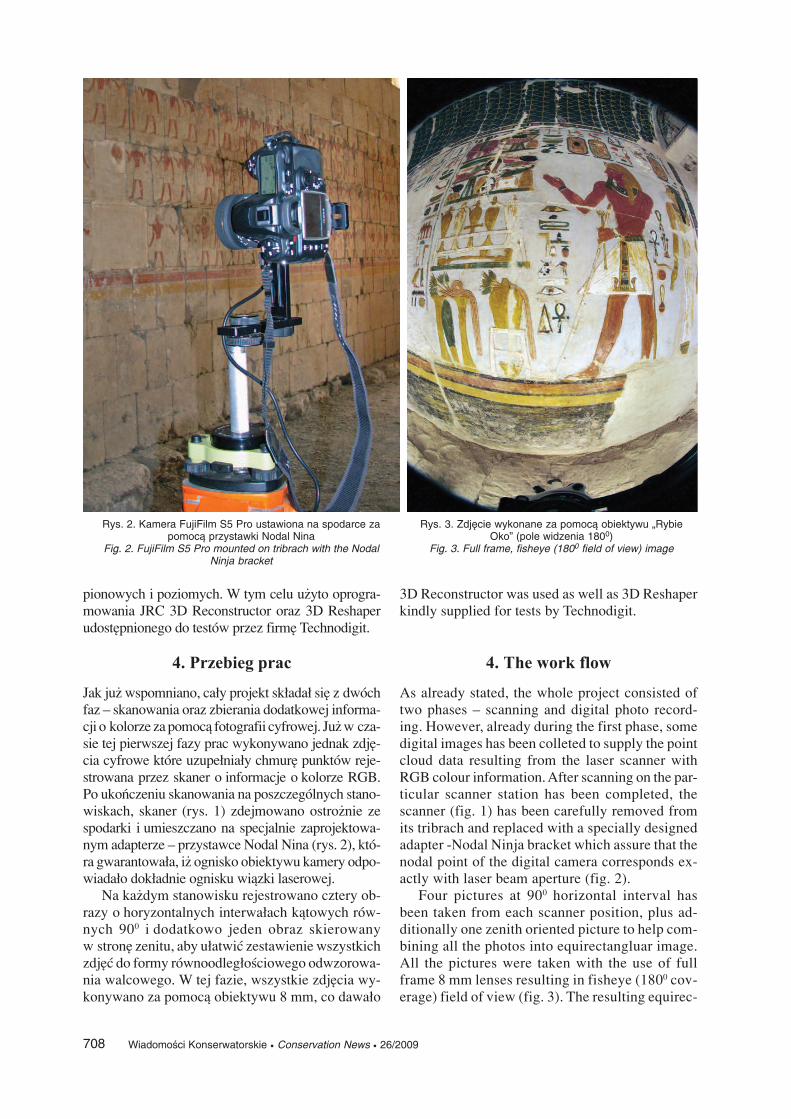
Jak juø wspomniano, ca≥y projekt sk≥ada≥ siÍ z dwÛchfaz ñ skanowania oraz zbierania dodatkowej informa-cji o kolorze za pomocπ fotografii cyfrowej. Juø w cza-sie tej pierwszej fazy prac wykonywano jednak zdjÍ-cia cyfrowe ktÛre uzupe≥nia≥y chmurÍ punktÛw reje-strowana przez skaner o informacje o kolorze RGB.Po ukoÒczeniu skanowania na poszczegÛlnych stano-wiskach, skaner (rys. 1) zdejmowano ostroønie zespodarki i umieszczano na specjalnie zaprojektowa-nym adapterze ñ przystawce Nodal Nina (rys. 2), ktÛ-ra gwarantowa≥a, iø ognisko obiektywu kamery odpo-wiada≥o dok≥adnie ognisku wiπzki laserowej.
Na kaødym stanowisku rejestrowano cztery ob-razy o horyzontalnych interwa≥ach kπtowych rÛw-nych 900 i dodatkowo jeden obraz skierowanyw stronÍ zenitu, aby u≥atwiÊ zestawienie wszystkichzdjÍÊ do formy rÛwnoodleg≥oúciowego odwzorowa-nia walcowego. W tej fazie, wszystkie zdjÍcia wy-konywano za pomocπ obiektywu 8 mm, co dawa≥o
3D Reconstructor was used as well as 3D Reshaperkindly supplied for tests by Technodigit.
4. The work flow
As already stated, the whole project consisted oftwo phases ñ scanning and digital photo record-ing. However, already during the first phase, somedigital images has been colleted to supply the pointcloud data resulting from the laser scanner withRGB colour information. After scanning on the par-ticular scanner station has been completed, thescanner (fig. 1) has been carefully removed fromits tribrach and replaced with a specially designedadapter -Nodal Ninja bracket which assure that thenodal point of the digital camera corresponds ex-actly with laser beam aperture (fig. 2).
Four pictures at 900 horizontal interval hasbeen taken from each scanner position, plus ad-ditionally one zenith oriented picture to help com-bining all the photos into equirectangluar image.All the pictures were taken with the use of fullframe 8 mm lenses resulting in fisheye (1800 cov-erage) field of view (fig. 3). The resulting equirec-
Rys. 2. Kamera FujiFilm S5 Pro ustawiona na spodarce zapomocą przystawki Nodal Nina
Fig. 2. FujiFilm S5 Pro mounted on tribrach with the NodalNinja bracket
Rys. 3. Zdjęcie wykonane za pomocą obiektywu „RybieOko” (pole widzenia 1800)
Fig. 3. Full frame, fisheye (1800 field of view) image

709Wiadomości Konserwatorskie • Conservation News • 26/2009
W przypadku, kiedy ustawienie skanera wzglÍ-dem dokumentowanych úcian by≥o niekorzystne4 lubw przypadku szczegÛlnie interesujπcych fragmen-tÛw, w drugi etapie prac wykonywano dodatkowyzestaw zdjÍÊ cyfrowych. Jeúli tylko by≥o to moøli-we, zdjÍcia te by≥y w zasadzie rÛwnoleg≥e do g≥Ûw-nej powierzchni dokumentowanych úcian.
For areas where position of the scanner in re-spect to walls being documented was not favora-ble4, or the walls in question were of particular in-terest, an additional set of photos was collected dur-ing second phase of the project. Whenever possi-ble, this photos were done roughly parallel to themain surface of documented walls.
Rys. 4. Odwzorowanie walcowe równoodległościowe stworzone z pięciu ujęć o polu widzenia 1800
Fig. 4. Equirectangluar image resulting from five full frame images
Rys. 5. Tzw „Cube Maps” utworzonych z obrazu równoodległościowegoFig. 5. Six Cube Maps resulting from equirectangluar image
pe≥ne pole widzenia obejmujπce 1800 (rys. 3). RÛw-noodleg≥oúciowe odwzorowanie walcowe (rys. 4)przekszta≥cano nastÍpnie w tzw. Cube Maps (rys.5), ktÛre wprowadzone do Leica Cyclone, dostar-cza≥y informacjÍ o kolorze RGB dla chmury punk-tÛw zarejestrowanej skanerem.
tangluar image (fig. 4) was transformed into sixCube Maps (fig. 5) which were ported to LeicaCyclone to supply the point cloud with color RGBinformation.

710 Wiadomości Konserwatorskie • Conservation News • 26/2009
5. Dane zebrane podczas prac
na miejscu i wyniki
W sumie podczas ca≥ego trzytygodniowego projek-tu zebrano 62 GB (sic!) danych zarejestrowanychw ponad 5.000 plikach. G≥Ûwnπ czÍúÊ stanowi≥a 23GB baza danych chmury punktÛw. Pozosta≥e plikito przede wszystkim zdjÍcia cyfrowe w formacieRAW, TIFF i JPG dokumentujπce oko≥o 1.500 frag-mentÛw úcian i poszczegÛlnych ciosÛw Ten ogrom-ny zbiÛr danych bÍdzie stanowi≥ podstawÍ do opra-cowania koÒcowej dokumentacji w wielu warian-tach. Poniøej przedstawiono krÛtkie opisy wszyst-kich moøliwych rodzajÛw opracowaÒ, ktÛre mogπpowstaÊ z zebranych danych.
5.1. Tzw. TrueView
Zarejestrowana chmura punktÛw wraz z informa-cjπ o kolorach RGB moøe zostaÊ udostepnionawszystkim zainteresowanym w formacie Leica Tru-eView i przeglπdana za pomocπ MS Internet Explo-rer. Leica Geosystems dystrybuuje nieodp≥atniewtyczkÍ do MS IE niezbÍdnπ do przeglπdania da-nych w tym trybie.
5. Data collected during the field
work and deliverables
All together nearly 62 GB (sic!) of data in over5.000 data files has been collected during thewhole project which lasted for 3 weeks. The mainpart of it is 23 GB point cloud data base. Remain-ing files constitute mostly of digital photos inRAW, TIFF and JPG format, representing imagesof ca. 1.500 walls and blocks fragments. This vastamount of data can be used to produce severaldifferent kinds of final documentation. Below,a brief description will follow of all the possibletypes of deliverables which might results from allthe data collected.
5.1. TrueView
The recorded point cloud data base, together withRGB colour information can be distributed amonginterested parties in form of Leica TrueView formatand viewed with help of MS Internet Explorer only.The necessary MS IE plugin is distributed by LeicaGeosystems free of charge.
Rys. 6.Trójwymiarowa chmura punktów w formacie TrueView w programie Internet ExplorerFig. 6. 3D point cloud in TrueView format viewed in Internet Explorer
Po otworzeniu pliku TrueView za pomocπ MSIE wyúwietlony zostaje nawigator TrueView, ktÛryprzedstawia wszystkie dostÍpne stanowiska Scan-Word5. Kiedy jedna z nich zostanie wybrana, otwierasiÍ okno TrueView (rys. 6), ktÛre przedstawia ca≥πscenÍ wokÛ≥ skanera. Istniejπ pe≥ne moøliwoúci po-wiÍkszania, przesuwania i obrotu poszczegÛlnychujÍÊ panoramicznych. Dodatkowo narzÍdzia pomia-rowe umoøliwiajπ odczytanie wspÛ≥rzÍdnych X, Y,
After opening the TrueView file with MS IE, oneis presented with TueView Navigator which showsall available ScanWord positions5. After choosingone of them, TrueView window (fig. 6) opens inwhich all the scene surrounding the scanner is rep-resented. Possibilities to magnify, pan and rotate theview are fully granted. Additionally, by pickingmeasuring tools one can read X, Y, Z coordinates ofany point chosen on the picture, as well as measure
711Wiadomości Konserwatorskie • Conservation News • 26/2009
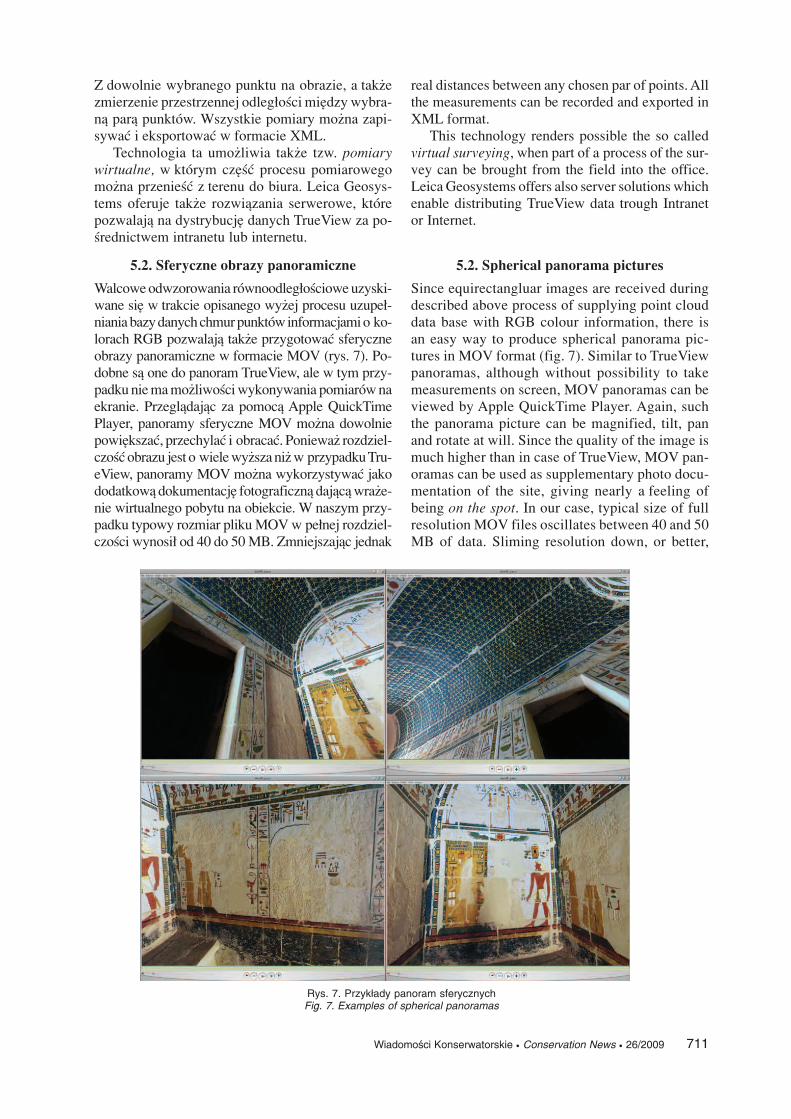
Rys. 7. Przykłady panoram sferycznychFig. 7. Examples of spherical panoramas
Z dowolnie wybranego punktu na obrazie, a takøezmierzenie przestrzennej odleg≥oúci miÍdzy wybra-nπ parπ punktÛw. Wszystkie pomiary moøna zapi-sywaÊ i eksportowaÊ w formacie XML.
Technologia ta umoøliwia takøe tzw. pomiarywirtualne, w ktÛrym czÍúÊ procesu pomiarowegomoøna przenieúÊ z terenu do biura. Leica Geosys-tems oferuje takøe rozwiπzania serwerowe, ktÛrepozwalajπ na dystrybucjÍ danych TrueView za po-úrednictwem intranetu lub internetu.
5.2. Sferyczne obrazy panoramiczne
Walcowe odwzorowania rÛwnoodleg≥oúciowe uzyski-wane siÍ w trakcie opisanego wyøej procesu uzupe≥-niania bazy danych chmur punktÛw informacjami o ko-lorach RGB pozwalajπ takøe przygotowaÊ sferyczneobrazy panoramiczne w formacie MOV (rys. 7). Po-dobne sπ one do panoram TrueView, ale w tym przy-padku nie ma moøliwoúci wykonywania pomiarÛw naekranie. Przeglπdajπc za pomocπ Apple QuickTimePlayer, panoramy sferyczne MOV moøna dowolniepowiÍkszaÊ, przechylaÊ i obracaÊ. Poniewaø rozdziel-czoúÊ obrazu jest o wiele wyøsza niø w przypadku Tru-eView, panoramy MOV moøna wykorzystywaÊ jakododatkowπ dokumentacjÍ fotograficznπ dajπcπ wraøe-nie wirtualnego pobytu na obiekcie. W naszym przy-padku typowy rozmiar pliku MOV w pe≥nej rozdziel-czoúci wynosi≥ od 40 do 50 MB. Zmniejszajπc jednak
real distances between any chosen par of points. Allthe measurements can be recorded and exported inXML format.
This technology renders possible the so calledvirtual surveying, when part of a process of the sur-vey can be brought from the field into the office.Leica Geosystems offers also server solutions whichenable distributing TrueView data trough Intranetor Internet.
5.2. Spherical panorama pictures
Since equirectangluar images are received duringdescribed above process of supplying point clouddata base with RGB colour information, there isan easy way to produce spherical panorama pic-tures in MOV format (fig. 7). Similar to TrueViewpanoramas, although without possibility to takemeasurements on screen, MOV panoramas can beviewed by Apple QuickTime Player. Again, suchthe panorama picture can be magnified, tilt, panand rotate at will. Since the quality of the image ismuch higher than in case of TrueView, MOV pan-oramas can be used as supplementary photo docu-mentation of the site, giving nearly a feeling ofbeing on the spot. In our case, typical size of fullresolution MOV files oscillates between 40 and 50MB of data. Sliming resolution down, or better,

712 Wiadomości Konserwatorskie • Conservation News • 26/2009
rozdzielczoúÊ lub ñ co jest lepszym rozwiπzaniem ñkonwertujπc dane do formatu Flash, panoramy MOVmoøna takøe publikowaÊ w internecie.
5.3. Rzut GÛrnego Tarasuúwiπtyni
Jednym z celÛw projektu by≥o przygotowanie rzutuGÛrnego Tarasu úwiπtyni. Postanowiono, øe rzutbÍdzie przedstawia≥ przekrÛj poziomy na wysoko-úci najwyøszych nisz, czyli mniej wiÍcej 2 metrypowyøej progu portalu wejúciowego prowadzπcegona GÛrny Taras. Poniewaø powierzchnie niektÛrychúcian, jak to siÍ czÍsto zdarza w egipskich úwiπty-niach, sπ pochy≥e, a wiele teoretycznie pionowychúcian wykazuje znaczne odchylenia od pionu, rzutzawiera takøe linie widokowe reprezentujπce pod-stawy wszystkich úcian [4].
B≥πd rejestracji wszytkich skanÛw do wspÛlne-go uk≥adu wspÛ≥rzÍdnych nie przekracza≥ 8 mmw obrÍbiÍ ca≥ego projektu. W przypadku rzutu GÛr-nego Tarasu úwiπtyni naleøy wiÍc spodziewaÊ siÍpodobnej dok≥adnoúci. Dla pojedynczych pomiesz-czeÒ, zw≥aszcza jeúli by≥y one skanowane z jedne-go lub dwÛch stanowisk skanera, dok≥adnoúÊ siÍga2-4 mm. Nowy rzut GÛrnego Tarasu úwiπtyni wy-kazuje wyraüne rÛønice w porÛwnaniu z wczeúniej-szym planami.
5.4. Modelowanie 3Di generowanie przekrojÛw
Proces skanowania 3D dokumentowa≥ nie tylko úcia-ny GÛrnego Tarasu, ale takøe ca≥e jego otoczeniew promieniu oko≥o 75 m od pozycji skanera, objÍ≥owiÍc swoim zasiÍgiem rÛwnieø duøπ czÍúÊ skalnegourwiska rozpoúcierajπcego siÍ nad úwiπtyniπ. W tensposÛb po raz pierwszy pojawi≥a siÍ moøliwoúÊ do-k≥adnej analizy niedostÍpnych dotychczas szczegÛ-≥Ûw ñ zboczy, fragmentÛw wysuniÍtych i nadwieszo-nych. Te dodatkowe informacje by≥y szczegÛlnieprzydatne w przypadku przekrojÛw pionowych pro-wadzonych w poprzek GÛrnego Tarasu na liniachwschÛd-zachÛd i pÛ≥noc-po≥udnie [4]. Na tym etapieprojektu rzut i przekroje wschÛd-zachÛd i pÛ≥noc-po≥udnie wy≥πcznie przy zastosowaniu oprogramo-wania Leica Cyclone.
Ostatnia, jeszcze nie ukoÒczona, faza ca≥ego pro-jektu, koncentruje siÍ na wytypowaniu najbardziejprzydatnych, zwaøywszy na specyfikÍ danych, na-rzÍdzi modelowania 3D i generowania szczegÛ≥o-wych przekrojÛw. Nie moøna w tym celu stosowaÊtypowych aplikacji AEC CAD s≥uøπcych do mode-lowania bry≥ lub powierzchni, a to z powodu olbrzy-miej iloúci danych danych pomiarowych i wymaga-nego poziomu szczegÛ≥owoúci modelu 3D. WydajesiÍ, øe jedyne dostÍpne w tej chwili rozwiπzanie to
converting them into Flash format, enables pub-lishing MOV panoramas in Internet.
5.3. General plan of the Upper Terraceof the Temple
One of the main aims of this project was howeverto establish a new general plan of the Upper Ter-race of the Temple. It has been decided that this planbe will represent horizontal section on a level cor-responding with the highest niches. This is roughly2 meters above the threshold of the Upper Terraceentrance gate. Since some of the walls faces, as of-ten in case of egyptian temples, are sloping, andmany nominally vertical walls show noticeable ir-regularities, the general plan also includes view linesof bottom parts of all the walls [4].
In view of the fact that accuracy of registeringseparate scans into common point cloud resulted ina mean error not grater than 8 mm over the wholearea, the similar overall accuracy can be expectedin case of the Upper Terrace general plan. In case ofsingle rooms, especially those which were scannedfrom one or two scanning stations, an accuracy be-tween 2 and 4 mm has been reached. The new planof the Upper Terrace shows noticeable differencesif confronted with the one which existed until now.
5.4. Modeling 3Dand sections production
Since 3D scanning recorded not only all walls ofthe Upper Teracce but also whole surroundingswithin radius of ca. 75 meters from scanner sta-tions, a good part of the gebel overlooking the sitehas been also included. This way, for the first time,it is also possible to see in details the gebel itself ñits slopes, its exposed and overhanging areas. Gen-eral E-W and N-S sections across the Upper Ter-race are particularly benefiting from this addition-al information [4]. At this stage of the project, pre-paring of the general plan and general E-W and N-S sections has been accomplished entirely in Lei-ca Cyclone software.
Still unfinished, the last phase of our project con-centrates of finding the most suitable tools for 3Dmodeling and detailed sections production. TypicalAEC CAD applications for solid or surface mode-ling can not be used there for the reason of wastescanning data amount and demanded accuracy ofthe 3D model. The only solution there is using pointcloud data to produce mesh models. Two alreadymentioned applications were tested. Both have verysimilar functionality and both proofed to be also veryefficient. JRC 3D Reconstructor seems to be spe-cially useful in filtering the data and generating fea-

713Wiadomości Konserwatorskie • Conservation News • 26/2009
wykorzystanie danych z chmury punktÛw do tworze-nia modeli siatkowych. W tej fazie projektu testowa-no dwie wspomniane juø poprzednio aplikacje. Obiewyposaøone sπ w podobne funkcje i obie okaza≥y siÍrÛwnie skuteczne. JRC 3D Reconstructor wydaje siÍprzy tym szczegÛlnie pomocny w filtrowaniu danychi automatycznym generowaniu krawÍdzi, natomiast
ture lines, while 3D Reshaper proofed to be excel-lent tool in meshing point clouds and automaticallygenerating detailed section lines in any desired di-rection.
Since 3D point cloud data collected in verydusty conditions of Upper Egypt needed to becarefully filtered, still another application ñ Mesh-
Rys. 8. Model siatkowy północnej ściany kaplicy HatszepsutFig. 8. Mesh model of the Hatshepsut Chapel northern wall
Rys. 9. Fragment modelu siatkowego Północnej Kaplicy Anubisa wraz z i liniami przekrojowymiFig. 9. Fragment of mesh model of the Northern Anubis Chapel with detailed section lines

714 Wiadomości Konserwatorskie • Conservation News • 26/2009
3D Reshaper okaza≥ siÍ bardzo skutecznym narzÍ-dziem tworzπcym modele siatkowe na podstawiechmur punktÛw, a takøe by≥ wyjπtkowo efektywnyw przypadku generowania linii przekrojowych pro-wadzonych w dowolnie wybranym kierunku.
Typowe dla GÛrnego Egiptu warunki skanowania(wysoka temperatura i znaczne zapylenie), wymaga≥ystarannego filtrowania danych. Przetestowano wiÍctakøe jeszcze jednπ aplikacjÍ: MeshLab6. Zastosowa-no wiele filtrÛw, ktÛre okaza≥y siÍ przydatne nie tylkow filtrowaniu chmur punktÛw, ale takøe w czyszcze-niu, naprawie i wyg≥adzaniu modeli siatkowych.
5.5. Fotomozaiki i ortofotomapy úcian
Generalnie moøliwe sπ dwa rodzaje widokÛw elewa-cyjnych ñ ortofotomapy i fotomozaiki. Pierwszy typto wierny obraz danej sceny ze wszystkimi elemen-tami we w≥aúciwej skali i bez zniekszta≥ceÒ perspek-tywicznych. Tworzenie, na dostawie skanÛw 3D, ta-kiej ortofotomapy z wymaganπ dla tego projektu roz-dzielczoúciπ, czyli wielkoúciπ piksela poniøej 0,5 mmwymaga jednak bardzo gÍstego skanowania i precy-zyjnego generowania modeli siatkowych. Z drugiej
strony, podstawowym zadaniem tej fazy projektu by≥adokumentacja g≥Ûwnej p≥aszczyzny úciany. Na szczÍ-úcie, wiÍkszoúÊ úcian úwiπtyni moøna uznaÊ za nie-mal idealne p≥askie powierzchnie. Wybrano wiÍc innerozwiπzanie problemu ñ fotomozaiki, gdzie tylkog≥Ûwnπ p≥aszczyznÍ úciany przedstawia siÍ w prawi-d≥owej skali bez øadnych geometrycznych zniekszta≥-ceÒ. W tym przypadku wszystkie elementy, ktÛreznajdujπ siÍ za g≥Ûwnπ p≥aszczyznπ úciany sπ repre-
Lab6 has been also successfully tested. Many fil-ters implemented there proofed to be very usefulnot only in filtering point clouds, but also in clean-ing, repairing, remeshing and smoothing meshedmodels.
5.5. Photomosaics and orthophoto of walls
Generally two kinds of wall facades plans are pos-sible ñ orthophotos and photomosaics. The first oneis the true representation of a given scene whereall entities are in a right scale and without any per-spective distortions. Such the orthophoto produc-tion with demanded pixel resolution below 0,5 mminvolves very dense scanning and careful mesh-ing. On the other hand, only representation of themain surface of the wall was the most important
issue of this project and fortunately most of thetemple walls could be considered as nearly planarsurfaces. Therefore a more simple approach hasbeen chosen ñ photomosaics, where only the mainsurface of walls is represented in a right scale andwithout any geometrical distortions. In this case,all items which are behind the plane of the mainsurface of the wall are represented in a slightlysmaller scale and with perspective distortions and
Rys. 10. Ortofotomapa jednej ze ścian świątyni użyty jako dokument referencyjny przy generowaniu fotomozaikiFig. 10. Orthophoto image of one of temple walls used as reference for photomosaic production

715Wiadomości Konserwatorskie • Conservation News • 26/2009
zentowane w nieco mniejszej skali i ze zniekszta≥ce-niem perspektywicznym. Odpowiednio, wszystkieelementy przed g≥Ûwnπ p≥aszczyznπ úciany bÍdπ od-wzorowane w wiÍkszej skali. RÛønice g≥ÍbokoúcimiÍdzy g≥Ûwnπ p≥aszczyznπ úciany a elementami po-≥oøonymi przed niπ i za niπ, nie przekracza≥y w na-szym przypadku 15 mm. ZdjÍcia wykonano zwyklez odleg≥oúci oko≥o 2 metrÛw uzyskujπc wielkoúÊ pik-sela nie przekraczajπcπ 0,3 mm. Przewidywany teo-retyczny b≥πd wynikajπcy z faktu iø powierzchniaúciany nie jest idealnπ p≥aszczyznπ (rÛønice g≥Íbo-koúci +/- 15 mm) wynosi wiÍc oko≥o 0,75% i by≥ dozaakceptowania w naszym przypadku.
Pierwszym krokiem by≥o wygenerowanie za po-mocπ Leica Cyclone, bezpoúrednio z chmury punk-tÛw 3D, czarnobia≥ych ortofotomap poszczegÛlnychúcian (rys. 10). Ich rozdzielczoúÊ nie przekracza≥a 2mm, ale by≥a wystarczajπca do znalezienia zestawuanalogicznych punktÛw na szczegÛ≥owych zdjÍciachcyfrowych i czarno-bia≥ych ortofotomapach. Pos≥u-øy≥y one jako punkty referencyjne pozwalajπce naprzekszta≥cenie obrazÛw rastrowych7 za pomocπBentley Descartes.
W zaleønoúci od rozmiaru detali, ktÛre mia≥aprzedstawiaÊ koÒcowa dokumentacja, rozdzielczoúÊstworzonych fotomozaik wynios≥a od 0,3 do 0,5 mm.Pozwala to na wydruk fotomozaik w skali 1 : 10z rozdzielczoúciπ 600 dpi, ktÛra ca≥kowicie odpo-wiada potrzebom nowoczesnego procesu wydaw-niczego. Fotomozaiki o najwyøszej rozdzielczoúci(0,3 mm) i wykonane w korzystnych warunkachoúwietleniowych8 pozwalajπ na powiÍkszenia, edy-cjÍ i druk nawet w skali 1:1 (rys. 11).
respectively all those projecting in front of the mainsurface of the wall will appear bigger. Depth dif-ferences between main surface of the wall anditems which are in front or behind were not ex-ceeding in our case 15 mm. Pictures were takenwith pixel resolution 0,3 mm at a distance of typi-cally 2 meters. Therefore, expected theoretical er-rors resulting from main wall surface being not ex-actly a planar (depth differences +/- 15 mm) shouldbe around 0,75% and were acceptable for thisproject.
As the first step, using 3D point clouds, roughblack and white, orthophoto images of walls planswere produced from Leica Cyclone (fig. 10). Theirresolution did not exceeded 2 mm but it was enoughto find suitable set of analogical points representedon digital photos and on black and white orthopho-tos. They served as reference points upon which pic-tures were warped7 with help of Bentley Descartes.
Depending from the size of details which wereto be represented on the final documentation, theresolution of resulting photomosaic pictures is be-tween 0,3 and 0,5 mm. This permits publishing pho-tomosaics in a scale 1 : 10 with 600 dpi resolutionwhich is fully suitable for modern publishing proc-ess. Photomosaic images of highest resolution (0,3mm) and recorded in favorable lighting conditions8
permit also enlarging, viewing and printing of cho-sen fragments up to 1:1 scale (Fig.11).
Rys. 11. Przykład fotomozaiki z rozdzielczością pikseli 0,3 mmFig.11. Photomosaic example with pixel resolution 0,3 mm

716 Wiadomości Konserwatorskie • Conservation News • 26/2009
5.6. Mapy wg≥ÍbieÒ
W przypadku wielu úcian widoczne by≥y nieregu-larnoúci powierzchni, a ich fasady bynajmniej niestanowi≥y idealnej p≥aszczyzny. PodjÍto wiÍc prÛbÍdokumentacji tych cech w formie tak zwanych mapwg≥ÍbieÒ. W tym przypadku, elewacje poszczegÛl-nych úcian przedstawiono w sposÛb przypominajπ-cy hipsometriÍ na planach topograficznych, gdzierÛønice (wysokoúci i g≥Íbokoúci) powierzchni úciansymbolizuje odpowiedni kod kolorÛw9 (rys. 12). Tenrodzaj prezentacji danych przestrzennych moøe byÊpotencjalnie niezwykle przydatny dla inøynierÛwzajmujπcych siÍ badaniem stabilnoúci úcian, ktÛrychczÍúÊ uleg≥a powaønym przesuniÍciom z powoduniestabilnoúci pod≥oøa, trzÍsieÒ ziemi i licznych in-nych powodÛw.
5.6. Walls surface displacement plans
Since many of walls show noticeable irregularities,their facades being far from an ideal flat surface, anattempt was made to show this features in form ofso called walls surface displacement plans. In thiscase walls facades are represented in a way similarto hypsometry on topographical plans, where dif-ferences (heights and depths) in the wall surface issymbolized by colour coding9 (Fig.12). This kindof spatial data presentation can be potentially ofa great interest to civil engineers when examiningstability of walls which underwent serious disloca-tion of blocks due to ground instability, earthquakesor any other reasons.
Rys. 12. Przykład mapy wgłębieńFig. 12. Example of displacement map
6. Wnioski i wstêpna
propozycja kontynuacji
projektu w sezonie 2010
W konkluzji trzeba stwierdziÊ, øe metoda dokumen-tacji úwiπtyni Hatszepsut za pomocπ skanowania 3Dpotwierdzi≥a swojπ przydatnoúÊ, zarÛwno jeúli cho-dzi o efektywnoúci, jak i dok≥adnoúci. G≥Ûwnπ prze-szkodπ, jakπ napotka≥ zespÛ≥, by≥ brak zawodowe-go fotografa. Poniewaø jakoúÊ fotomozaik zaleøa≥a
6. Conclusions and preliminary
proposal of project continuation
during 2010 season
To conclude, one must state that the idea of docu-menting the Hatshepsut Temple by means of 3Dscanning proofed to be both very efficient and veryaccurate. The main obstacle which the field teamfaced during the whole project was lack of profes-sional photographer. Since the quality of photomo-

717Wiadomości Konserwatorskie • Conservation News • 26/2009
Literatura � References
[1] Z. SzafraÒski (ed.), KrÛlowa Hatszepsut i jej úwiπtynia 3500 lat pÛüniej, Warszawa 2001.[2] Z. Wysocki (ed.), The temple of Queen Hatshepsut. Vol. 4. The report of the Polish-Egyptian archa-
eological and preservation mission Deir elñBahari 1980-1988, Warszawa 1991.[3] T. Kaczor, Teoria i praktyka w konserwacji staroøytnych zespo≥Ûw zabytkowych w Tebach. Raporty
Inst. Hist. Archit Proc. 2007, Ser PRE nr 422, http://www. dbc.wroc.pl/publication/1563, 97-101,2007.
[4] J. Koúciuk, T. Kaczor, B. Chmielewski, T. WaligÛrski, P. Srokowski. Skanowanie 3D fragmentÛwúwiπtyni Hatszepsut w Deir el-Bahari w Egipcie, Raporty Instytutu I-12 Serii Sprawozdania nr 19/09(raport nie publikowany), 2009.
*Laboratorium Skanowania i Modelowania 3D, PolitechnikaWroc≥awska, Wroc≥aw, PolskaLaboratorium zorganizowane zosta≥o przy Instytucie Histo-rii Architektury, Sztuki i Techniki na Wydziale Architekturyw ramach dzia≥ania SPO WKP 1/1.4.2/2/2005/87/168/464.
1 HistoriÍ úwiπtyni moøna znaleüÊ w [1]. HistoriÍ restaura-cji úwiπtyni i polskiego udzia≥u w tym zadaniu moøna zna-leüÊ w [2] i [3].
2 ZespÛ≥ serdecznie dziÍkuje panu Lotharowi Assenmache-rowi ñ Dyrektorowi Generalnemu Leica Geosystems, ktÛryudzieli≥ ogromnego wsparcia projektowi i umoøliwi≥ jego re-alizacjÍ.
3 O znanych parametrach rÛwnania soczewek, ktÛre umoøli-wia≥o korekcjÍ dystorsji i innych wad obiektywu.
4 Zbyt daleko do úciany lub pod niekorzystnym kπtem.5 PoszczegÛlne stanowiska skanera w trakcie skanowania.6 Visual Computing Lab ñ ISTI ñ CNR;
http://meshlab.sourceforge.net/7 Obraz rastrowy przeliczono ponownie za pomocπ odpowied-
nich wielomianÛw.8 Najlepiej na zewnπtrz w bezpoúrednim úwietle s≥onecznym.9 Wg≥Íbienia reprezentowane sπ w kolorach niebieskich, a wy-
puk≥oúci w czerwieniach.
*Laboratory of 3D Scanning and Modeling, Wroc≥aw Univer-sity of Technology, Wroc≥aw, PolandThe Laboratory was organized at the Institute of History ofArchitecture, Arts and Technology at Faculty of Architecture(project SPO WKP 1/1.4.2/2/2005/87/168/464).
1 For the temple history see [1]. For history of restoration ofthe temple and Polish contribution see [2] and [3].
2 The team would like to express special thanks to LotharAssenmacher ñ the General Director of Leica Geosystems whogreatly supported this project and rendered it possible.
3 With known lens equation parameters permitting us to re-move distortion and other lens errors.
4 To far from the wall or in unfavorable angle of view.5 Particular locations of the scanner during any scanning pro-
cess.6 Visual Computing Lab ñ ISTI ñ CNR;
http://meshlab.sourceforge.net/7 Raster image metrics has been recalculated with polyno-
mial equations.8 Preferably outdoors with direct sun light.9 Depths are show in blue while heights in red colors.
saics greatly depends on quality of pictures collect-ed on the field, it is advisable, particularly on theroofed areas where artificial lighting must be en-gaged, to supply the field team with professionalphotographer with good experience in shooting re-lief decorated walls. It is anticipated that the workwill be continued during spring 2010. Four furtherareas of the Upper Terrace has been already chosento be documented. This are:
ñ the Southern Chapel of Amun involving 2scanner stations required
ñ the Northern Chapel of Amun involving 4scanner stations required
ñ the Main Sanctuary of Amun involving 16scanner stations required
ñ the inner facades of Ptolemaic Portico involv-ing 3 scanner stations required.
All together 25 scanner positions are estimated,what results in 3 full days of scanning. However,one additional day or two should be added in antic-ipation of any unexpected problems.
w ogromnym stopniu od jakoúci zdjÍÊ zebranychw terenie, planuje siÍ, szczegÛlnie w obszarach za-daszonych, gdzie potrzebne jest sztuczne oúwietle-nie, dokooptowaÊ do zespo≥u zawodowego fotografaz doúwiadczeniem w fotografowaniu úcian zdobio-nych reliefami. Przewiduje siÍ, øe prace bÍdπ kon-tynuowane wiosnπ 2010 r. Do dokumentacji wybra-no cztery kolejne obszary GÛrnego Tarasu:
ñ Po≥udniowa Kaplica Amuna wymagajπca 2stanowisk skanera
ñ PÛ≥nocna Kaplica Amuna wymagajπca 4 sta-nowisk skanera
ñ G≥Ûwne Sanktuarium Amuna wymagajπce 16stanowisk skanera
ñ wewnÍtrzne fasady Portyku Ptolomejskiegowymagajπce 3 stanowisk skanera.
OgÛlnie szacuje siÍ, øe potrzebne bÍdzie oko≥o25 stanowisk skanowania, co oznacza minimum 3dni pracy w terenie. Naleøy jednakøe przewidzieÊdodatkowy dzieÒ lub dwa na wypadek nieprzewi-dzianych problemÛw.





























