Embed Size (px)
Citation preview

PREDICTION, PREDICTOR, PREDICTION ERRORFORWARD and BACKWARD prediction
Levinson – Durbin algorithmLattice filters
New AR parametrization: Reflection coefficients
SGN 21006 Advanced Signal Processing:Lecture 6
Linear Prediction
Ioan Tabus
Department of Signal ProcessingTampere University of Technology
Finland
1 / 34

PREDICTION, PREDICTOR, PREDICTION ERRORFORWARD and BACKWARD prediction
Levinson – Durbin algorithmLattice filters
New AR parametrization: Reflection coefficients
Outline
I Dealing with three notions: PREDICTION, PREDICTOR, PREDICTION ERROR;
I FORWARD versus BACKWARD: Predicting the future versus (improper terminology) predicting the past;
I Fast computation of AR parameters: Levinson – Durbin algorithm;
I New AR parametrization: Reflection coefficients;
I Lattice filters
References : Chapter 3 from S. Haykin- Adaptive Filtering Theory - Prentice Hall, 2002.
2 / 34

PREDICTION, PREDICTOR, PREDICTION ERRORFORWARD and BACKWARD prediction
Levinson – Durbin algorithmLattice filters
New AR parametrization: Reflection coefficients
Notations, Definitions and Terminology
I Time series:
u(1), u(2), u(3), . . . , u(n − 1), u(n), u(n + 1), . . .
I Linear prediction of order M – FORWARD PREDICTION
u(n) = w1u(n − 1) + w2u(n − 2) + . . . + wMu(n − M)
=M∑k=1
wku(n − k) = wT u(n − 1)
I Regressor vector
u(n − 1) =[
u(n − 1) u(n − 2) . . . u(n − M)]T
I Predictor vector of order M – FORWARD PREDICTOR
w =[
w1 w2 . . . wM]T
aM =[
1 −w1 −w2 . . . −wM]T
=[
aM,0 aM,1 aM,2 . . . aM,M]T
and thus aM,0 = 1, aM,1 = −w1, aM,2 = −w2, . . . , aM,M = −wM ,
I Prediction error of order M – FORWARD PREDICTION ERROR
fM (n) = u(n) − u(n) = u(n) − wT u(n − 1) = aTM
[u(n)
u(n − 1)
]= aTMu(n)
3 / 34

PREDICTION, PREDICTOR, PREDICTION ERRORFORWARD and BACKWARD prediction
Levinson – Durbin algorithmLattice filters
New AR parametrization: Reflection coefficients
Notations, Definitions and Terminology
r(k) = E [u(n)u(n + k)] – autocorrelation function
R = E [u(n − 1)uT (n − 1)] = E
u(n − 1)u(n − 2)u(n − 3)u(n − M)
[u(n − 1) u(n − 2) u(n − 3) . . . u(n − M)
]
=
Eu(n − 1)u(n − 1) Eu(n − 1)u(n − 2) . . . Eu(n − 1)u(n − M)Eu(n − 2)u(n − 1) Eu(n − 2)u(n − 2) . . . Eu(n − 2)u(n − M)
. . . .
. . . .
. . . .Eu(n − M)u(n − 1) Eu(n − M)u(n − 2) . . . Eu(n − M)u(n − M)
=
R =
r(0) r(1) . . . r(M − 1)r(1) r(0) . . . r(M − 2). . . .. . . .. . . .
r(M − 1) r(M − 2) . . . r(0)
– autocorrelation matrix
r = E [u(n − 1)u(n)] =[
r(1) r(2) r(3) . . . r(M)]T – autocorrelation vector
rB = E [u(n − 1)u(n − M − 1)] =[
r(M) r(M − 1) r(M − 2) . . . r(1)]T
– Superscript B is the vector reversing (Backward) operator. i.e. for any vector x , we have
xB =[
x(1) x(2) x(3) . . . x(M)]B =
[x(M) x(M − 1) x(M − 2) . . . x(1)
]4 / 34

PREDICTION, PREDICTOR, PREDICTION ERRORFORWARD and BACKWARD prediction
Levinson – Durbin algorithmLattice filters
New AR parametrization: Reflection coefficients
Optimal forward linear prediction
I Optimality criterion
J(w) = E [fM (n)]2 = E [u(n) − wT u(n − 1)]2
J(aM ) = E [fM (n)]2 = E [aTM
[u(n)
u(n − 1)
]]2
I Optimal solution:
Optimal Forward Predictor wo = R−1r
Forward Prediction Error Power PM = r(0) − rTwo
I Two derivations of optimal solution1. Transforming the criterion into a quadratic form
J(w) = E [u(n) − wT u(n − 1)]2 = E [u(n) − wT u(n − 1)][u(n) − u(n − 1)Tw ]
= E [u(n)]2 − 2E [u(n)u(n − 1)T ]w + wT E [u(n − 1)u(n − 1)T ]w
= r(0) − 2rTw + wTRw
= r(0) − rTR−1r + (w − R−1r)TR(w − R−1r) (1) 5 / 34

PREDICTION, PREDICTOR, PREDICTION ERRORFORWARD and BACKWARD prediction
Levinson – Durbin algorithmLattice filters
New AR parametrization: Reflection coefficients
Augmented Wiener Hopf equations
I The matrix R is positive semi-definite because
xTRx = xT E [u(n)u(n)]T x = E [u(n)T x]2 ≥ 0 ∀x
and therefore the quadratic form in the right hand side of (1) (w − R−1r)TR(w − R−1r) attains
its minimum when (wo − R−1r) = 0, i.e.
wo = R−1r
For the predictor wo , the optimal criterion in (1) equals
PM = r(0) − rTR−1r = r(0) − rTwo
6 / 34

PREDICTION, PREDICTOR, PREDICTION ERRORFORWARD and BACKWARD prediction
Levinson – Durbin algorithmLattice filters
New AR parametrization: Reflection coefficients
Augmented Wiener Hopf equations
I Derivation based on optimal Wiener filter designThe optimal predictor evaluation can be rephrased as the following Wiener filter design problem:
I find the FIR filtering process y(n) = wT u(n)I “as close as possible” to desired signal d(n) = u(n + 1), i.e.I minimizing the criterion E [d(n) − y(n)]2 = E [u(n + 1) − wT u(n)]2
Then the optimal solution is given by wo = R−1p where R = E [u(n)u(n)T ] and
p = E [d(n)u(n)] = E [u(n + 1)u(n)] = E [u(n)u(n − 1)] = r , i.e.
wo = R−1r
7 / 34

PREDICTION, PREDICTOR, PREDICTION ERRORFORWARD and BACKWARD prediction
Levinson – Durbin algorithmLattice filters
New AR parametrization: Reflection coefficients
Augmented Wiener Hopf equationsThe optimal predictor filter solution wo and the optimal prediction error power satisfy
r(0) − rTwo = PM
Rwo − r = 0
which can be written in a block matrix equation form[r(0) rT
r R
] [1
−wo
]=
[PM0
]With the previous notations[
1−wo
]= aM[
r(0) rT
r R
]= RM+1 – Autocorrelation matrix of dimensions (M + 1) × (M + 1)
Finally, the augmented Wiener Hopf equations for optimal forward prediction error filter are
RM+1aM =
[PM0
]or
r(0) r(1) . . . r(M)r(1) r(0) . . . r(M − 1). . . .. . . .. . . .
r(M) r(M − 1) . . . r(0)
aM,0aM,1aM,2..
aM,M
=
PM00..0
Whenever RM is nonsingular, and aM,0 is set to 1, there are unique solutions aM and PM .
8 / 34

PREDICTION, PREDICTOR, PREDICTION ERRORFORWARD and BACKWARD prediction
Levinson – Durbin algorithmLattice filters
New AR parametrization: Reflection coefficients
Optimal backward linear prediction
I Linear backward prediction of order M – BACKWARD PREDICTION
ub(n − M) = g1u(n) + g2u(n − 1) + . . . + gMu(n − M + 1)
=M∑k=1
gku(n − k + 1) = gT u(n)
where the BACKWARD PREDICTOR is
g =[
g1 g2 . . . gM]T
I Backward prediction error of order M – BACKWARD PREDICTION ERROR
bM (n) = u(n − M) − ub(n − M) = u(n − M) − gT u(n)
I Optimality criterion
Jb(g) = E [bM (n)]2 = E [u(n − M) − gT u(n)]2
9 / 34

PREDICTION, PREDICTOR, PREDICTION ERRORFORWARD and BACKWARD prediction
Levinson – Durbin algorithmLattice filters
New AR parametrization: Reflection coefficients
Optimal backward linear prediction
I Optimal solution:
Optimal Backward Predictor go= R−1rB = wB
o
Forward Prediction Error Power PM = r(0) − (rB )T go= r(0) − rTwo
I Derivation based on optimal Wiener filter designThe optimal backward predictor evaluation can be rephrazed as the following Wiener filter design problem:
I find the FIR filtering process y(n) = gT u(n)I “as close as possible” to desired signal d(n) = u(n − M), i.e.I minimizing the criterion E [d(n) − y(n)]2 = E [u(n − M) − gT u(n)]2
Then the optimal solution is given by go= R−1p where R = E [u(n)u(n)T ] and
p = E [d(n)u(n)] = E [u(n − M)u(n)] = E [u(n − M − 1)u(n − 1)] = rB , i.e.
go= R−1rB
and the optimal criterion value is
Jb(go) = E [bM (n)]2 = E [d(n)]2 − gT
oRg
o= E [d(n)]2 − gT
orB = r(0) − gT
orB 10 / 34

PREDICTION, PREDICTOR, PREDICTION ERRORFORWARD and BACKWARD prediction
Levinson – Durbin algorithmLattice filters
New AR parametrization: Reflection coefficients
Relations between Backward and Forward predictors
I Relations between Backward and Forward predictors
go= wB
o
I Useful mathematical result:If the matrix R is Toeplitz, then for all vectors x
(Rx)B = RxB
(Rx)Bi = (RxB )i
(Rx)M−i+1 = (RxB )i
Proof:
(RxB )i =M∑j=1
Ri,j xM−j+1 =M∑j=1
r(i − j)xM−j+1j=M−k+1
=M∑k=1
r(i − M + k − 1)xk
=M∑k=1
RM−i+1,k xk = (Rx)M−i+1 = (Rx)Bi
11 / 34

PREDICTION, PREDICTOR, PREDICTION ERRORFORWARD and BACKWARD prediction
Levinson – Durbin algorithmLattice filters
New AR parametrization: Reflection coefficients
Relations between Backward and Forward predictors
I The Forward and Backward optimal predictors are solutions of the systems
Rwo = r
Rgo= rB
Rgo= rB = (Rwo )
B = RwBo
and since R is supposed nonsingular, we have
go= wB
o
12 / 34

PREDICTION, PREDICTOR, PREDICTION ERRORFORWARD and BACKWARD prediction
Levinson – Durbin algorithmLattice filters
New AR parametrization: Reflection coefficients
Augmented Wiener-Hopf equations for Backwardprediction
I Augmented Wiener-Hopf equations for Backward prediction error filterThe optimal Backward predictor filter solution g
oand the optimal Backward prediction error power
satisfy
Rgo− rB = 0
r(0) − (rB )T go= PM
which can be written in a block matrix equation form
[R rB
(rB )T r(0)
] [−g
o1
]=
[0
PM
]
where we can identify the factors as:
[−g
o1
]= cM[
R rB
(rB )T r(0)
]= RM+1 – Autocorrelation matrix of dimensions (M + 1) × (M + 1)
13 / 34

PREDICTION, PREDICTOR, PREDICTION ERRORFORWARD and BACKWARD prediction
Levinson – Durbin algorithmLattice filters
New AR parametrization: Reflection coefficients
Augmented Wiener-Hopf equations for Backwardprediction
Finally, the augmented Wiener Hopf equations for optimal backward prediction error filter are
RM+1cM =
[0
PM
]or
r(0) r(1) . . . r(M)r(1) r(0) . . . r(M − 1). . . .. . . .. . . .
r(M) r(M − 1) . . . r(0)
cM,0cM,1cM,2..
cM,M
=
r(0) r(1) . . . r(M)r(1) r(0) . . . r(M − 1). . . .. . . .. . . .
r(M) r(M − 1) . . . r(0)
aM,M
aM,M−1aM,M−2
.
.aM,0
=
000..
PM
The augmented Wiener-Hopf equations for forward and backward prediction are very similar and they help in
finding recursive in order recursions, as shown next.
14 / 34

PREDICTION, PREDICTOR, PREDICTION ERRORFORWARD and BACKWARD prediction
Levinson – Durbin algorithmLattice filters
New AR parametrization: Reflection coefficients
Levinson – Durbin algorithm
I The augmented Wiener-Hopf equations for forward and backward prediction provide a short derivation ofLevinson-Durbin main recursions.
I Stressing the order of the filter: all variables will receive a subscript expressing the order of the predictor:Rm, rm, am,wom
.
I Several order recursive equations can be written for the involved quantities:
rm+1 =[
r(1) r(2) . . . r(m) r(m + 1)]T =
[rm
r(m + 1)
]
Rm+1 =
[Rm rBm
(rBm)T r(0)
]=
[r(0) rTmrm Rm
]
15 / 34

PREDICTION, PREDICTOR, PREDICTION ERRORFORWARD and BACKWARD prediction
Levinson – Durbin algorithmLattice filters
New AR parametrization: Reflection coefficients
LD recursion derivation:Let define the vectors ψ and the scalar ∆m−1 and evaluate them using augmented WH equations:
ψ =
[am−1
0
]−
∆m−1
Pm−1
[0
aBm−1
](2)
∆m−1 = rTmaBm−1 = aTm−1rBm = r(m) +
m−1∑k=1
am−1,k r(m − k)
Multiplying the right hand side of Equation (2) by Rm+1 =
[Rm rBm
(rBm)T r(0)
]=
[r(0) rTmrm Rm
]we obtain
Rm+1ψ = Rm+1
{[am−1
0
]−
∆m
Pm−1
[0
aBm−1
]}
=
[Rm rBm
(rBm)T r(0)
] [am−1
0
]−
∆m−1
Pm−1
[r(0) rTmrm Rm
] [0
aBm−1
]
=
[Rmam−1
(rBm)T am−1
]−
∆m−1
Pm−1
[rTmaBm−1
RmaBm−1
]=
[Rmam−1∆m−1
]−
∆m−1
Pm−1
[∆m−1
RmaBm−1
]
=
Pm−10m−1∆m−1
−∆m−1
Pm−1
∆m−10m−1Pm−1
=
Pm−1 −∆2m−1
Pm−10m−1
∆m−1 − ∆m−1
=
Pm−1 −∆2m−1
Pm−10m
16 / 34

PREDICTION, PREDICTOR, PREDICTION ERRORFORWARD and BACKWARD prediction
Levinson – Durbin algorithmLattice filters
New AR parametrization: Reflection coefficients
LD recursion proof:
Recall the augmented WH equation
RM+1aM =
[PM0
]
Now using ψ(1) = am−1,0 = 1, and since we suppose Rm nonsingular, the unique solution of
Rm+1ψ =
Pm−1 −∆2m−1
Pm−10m
provides the optimal predictor am = ψ with the recursion (2) and the optimal prediction error power
Pm = Pm−1 −∆2
m−1
Pm−1
= Pm−1(1 −∆2
m−1
P2m−1
) = Pm−1(1 − Γ2m)
with the notation
Γm = −∆m−1
Pm−1
17 / 34

PREDICTION, PREDICTOR, PREDICTION ERRORFORWARD and BACKWARD prediction
Levinson – Durbin algorithmLattice filters
New AR parametrization: Reflection coefficients
Levinson – Durbin recursions
Levinson – Durbin recursions
am =
[am−1
0
]+ Γm
[0
aBm−1
]Vector form of L – D recursions
am,k = am−1,k + Γmam−1,m−k , k = 0, 1, . . . ,m Scalar form of L – D recursions
∆m−1 = aTm−1rBm = r(m) +
m−1∑k=1
am−1,k r(m − k)
Γm = −∆m−1
Pm−1
Pm = Pm−1(1 − Γ2m)
18 / 34

PREDICTION, PREDICTOR, PREDICTION ERRORFORWARD and BACKWARD prediction
Levinson – Durbin algorithmLattice filters
New AR parametrization: Reflection coefficients
LD recursion variables:Interpretation of ∆m and Γm
1. ∆m−1 = E [fm−1(n)bm−1(n − 1)]Proof (Solution of Problem 9 page 238 in [Haykin91])
E [fm−1(n)bm−1(n − 1)] = E [aTm−1u(n)][u(n − 1)T aBm−1] = aTm−1
[rTm
Rm−1 rBm−1
] [−wB
m−11
]
=[
1 −wTm−1
] [rTmaBm−10m−1
]= rTmaBm−1 = ∆m−1
2. ∆0 = E [f0(n)b0(n − 1)] = E [u(n)u(n − 1)] = r(1)
3. Iterating Pm = Pm−1(1 − Γ2m) we obtain
Pm = P0
m∏k=1
(1 − Γ2k )
4. Since the power of prediction error must be positive for all orders, the reflection coefficients are less thanunit in absolute value:
|Γm| ≤ 1 ∀m = 0, . . . ,M
5. Reflection coefficients equal last autoregressive coefficient, for each order m:
Γm = am,m, ∀m = M,M − 1, . . . , 1
19 / 34

PREDICTION, PREDICTOR, PREDICTION ERRORFORWARD and BACKWARD prediction
Levinson – Durbin algorithmLattice filters
New AR parametrization: Reflection coefficients
Algorithm Levinson-Durbin
Given r(0), r(1), r(2), . . . , r(M)
(for example, estimated from data u(1), u(2), u(3), . . . , u(T ) using r(k) = 1T
∑Tn=k+1 u(n)u(n − k))
1. Initialize ∆0 = r(1), P0 = r(0)
2. For m = 1, . . . ,M
2.1 Γm = −∆m−1
Pm−1
2.2 am,0 = 1
2.3 am,k = am−1,k + Γmam−1,m−k , k = 1, . . . ,m
2.4 ∆m = r(m + 1) +m∑
k=1
am,k r(m + 1 − k)
2.5 Pm = Pm−1(1 − Γ2m)
Computational complexity:For the m–th iteration of Step 2: 2m + 2 multiplications, 2m + 2 additions, 1 divisionThe overall computational complexity: O(M2) operations
20 / 34

PREDICTION, PREDICTOR, PREDICTION ERRORFORWARD and BACKWARD prediction
Levinson – Durbin algorithmLattice filters
New AR parametrization: Reflection coefficients
Algorithm (L–D) Second form
Given r(0) and Γ1, Γ2, . . . , ΓM
1. Initialize P0 = r(0)
2. For m = 1, . . . ,M
2.1 am,0 = 1
2.2 am,k = am−1,k + Γmam−1,m−k , k = 1, . . . ,m
2.3 Pm = Pm−1(1 − Γ2m)
21 / 34

PREDICTION, PREDICTOR, PREDICTION ERRORFORWARD and BACKWARD prediction
Levinson – Durbin algorithmLattice filters
New AR parametrization: Reflection coefficients
Inverse Levinson – Durbin algorithm
am,k = am−1,k + Γmam−1,m−k
am,m−k = am−1,m−k + Γmam−1,k
[am,k
am,m−k
]=
[1 ΓmΓm 1
] [am−1,m−kam−1,k
]
and using the identity Γm = am,m
am−1,k =am,k − am,mam,m−k
1 − (am,m)2k = 1, . . . ,m
22 / 34

PREDICTION, PREDICTOR, PREDICTION ERRORFORWARD and BACKWARD prediction
Levinson – Durbin algorithmLattice filters
New AR parametrization: Reflection coefficients
Inverse Levinson – Durbin algorithm
The second order properties of the AR process are perfectly described by the set of reflection coefficients
This immediately follows from the following property:The sets {P0, Γ1, Γ2, . . . , ΓM} and {r(0), r(1), . . . , r(M)} are in one-to-one correspondenceProof
(a) {r(0), r(1), . . . , r(M)}(Algorithm L – D)
=⇒ {P0, Γ1, Γ2, . . . , ΓM , }(b) From
Γm+1 = −∆m
Pm= −
r(m + 1) +∑m
k=1 am,k r(m + 1 − k)
Pm
we can obtain immediately
rm+1 = −Γm+1Pm −m∑
k=1
am,k r(m + 1 − k)
which can be iterated together with Algorithm L–D form 2, to obtain all r(1), . . . , r(M).
23 / 34

PREDICTION, PREDICTOR, PREDICTION ERRORFORWARD and BACKWARD prediction
Levinson – Durbin algorithmLattice filters
New AR parametrization: Reflection coefficients
Whitening property of prediction – error filters
I In theory, a prediction – error filter is capable of whitening a stationary discrete-time stochastic processapplied to its input, if the order of the filter is high enough.
I Then all information in the original stochastic process u(n) is represented by the parameters{PM , aM,1, aM,2, . . . , aM,M} (or, equivalently, by {P0, Γ1, Γ2, . . . , ΓM}).
I A signal equivalent (as second order properties) can be generated starting from{PM , aM,1, aM,2, . . . , aM,M} using the autoregressive difference equation model.
I These “analyze and generate” paradigms combine to provide the basic principle of vocoders.
24 / 34

PREDICTION, PREDICTOR, PREDICTION ERRORFORWARD and BACKWARD prediction
Levinson – Durbin algorithmLattice filters
New AR parametrization: Reflection coefficients
Lattice Predictors
I Order -Update Recursions for Prediction errorsSince the predictors obey the recursive–in–order equations
am =
[am−1
0
]+ Γm
[0
aBm−1
]
aBm =
[0
aBm−1
]+ Γm
[am−1
0
]it is natural that prediction errors can be expressed in recursive–in–order forms. These forms resultsconsidering the recursions for the vector um+1(n)
um+1(n) =
[um(n)
u(n − m)
]um+1(n) =
[u(n)
um(n − 1)
]Combining the equations we obtain
fm(n) = aTmum+1(n) =[
aTm−1 0] [
um(n)u(n − m)
]+ Γm
[0 (aBm−1)
T] [
u(n)um(n − 1)
]=
= aTm−1um(n) + Γm(aBm−1)T um(n − 1) =
= fm−1(n) + Γmbm−1(n − 1)
25 / 34

PREDICTION, PREDICTOR, PREDICTION ERRORFORWARD and BACKWARD prediction
Levinson – Durbin algorithmLattice filters
New AR parametrization: Reflection coefficients
Lattice Predictors
bm(n) = (aBm)T um+1(n) =[
0 (aBm−1)T
] [u(n)
um(n − 1)
]+ Γm
[(am−1)
T 0] [
um(n)u(n − m)
]=
= (aBm−1)T um(n − 1) + Γm(am−1)
T um(n)
= bm−1(n − 1) + Γmfm−1(n)
The order recursions of the errors can be represented as[fm(n)bm(n)
]=
[1 ΓmΓm 1
] [fm−1(n)
bm−1(n − 1)
]
26 / 34

PREDICTION, PREDICTOR, PREDICTION ERRORFORWARD and BACKWARD prediction
Levinson – Durbin algorithmLattice filters
New AR parametrization: Reflection coefficients
Lattice Predictors
fm(n) = fm−1(n) + Γmbm−1(n − 1)
bm(n) = bm−1(n − 1) + Γmfm−1(n)
Using the time shifting operator q−1, the prediction error recursions are given by
[fm(n)bm(n)
]=
[1 Γmq−1
Γm q−1
] [fm−1(n)bm−1(n)
]
which can now be iterated for m = 1, 2, . . . ,M to obtain
[fM (n)bM (n)
]=
[1 ΓMq−1
ΓM q−1
] [1 ΓM−1q
−1
ΓM−1 q−1
]. . .
[1 Γ1q
−1
Γ1 q−1
] [f0(n)b0(n)
]
=
[1 ΓMq−1
ΓM q−1
] [1 ΓM−1q
−1
ΓM−1 q−1
]. . .
[1 Γ1q
−1
Γ1 q−1
] [11
]u(n)
Having available the reflexion coefficients, all prediction errors of order m = 1, . . . ,M can be computed using theLattice predictor, in 2M additions and 2M multiplications.
27 / 34

PREDICTION, PREDICTOR, PREDICTION ERRORFORWARD and BACKWARD prediction
Levinson – Durbin algorithmLattice filters
New AR parametrization: Reflection coefficients
Lattice Predictors
Some characteristics of the Lattice predictor:
1. It is the most efficient structure for generating simultaneously the forward and backward prediction errors.
2. The lattice structure is modular: increasing the order of the filter requires adding only one extra module,leaving all other modules the same.
3. The various stages of a lattice are decoupled from each other in the following sense: The memory of thelattice (storing b0(n − 1), . . . , bM−1(n − 1)) contains orthogonal variables, thus the informationcontained in u(n) is split in M pieces, which reduces gradually the redundancy of the signal.
4. The similar structure of the lattice filter stages makes the filter suitable for VLSI implementation.
28 / 34

PREDICTION, PREDICTOR, PREDICTION ERRORFORWARD and BACKWARD prediction
Levinson – Durbin algorithmLattice filters
New AR parametrization: Reflection coefficients
Lattice Inverse filters
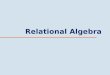
I The basic equations for one stage of the lattice are
fm(n) = fm−1(n) + Γmbm−1(n − 1)
bm(n) = Γmfm−1(n) + bm−1(n − 1)
and simply rewriting the first equation
fm−1(n) = fm(n) − Γmbm−1(n − 1)
bm(n) = Γm fm−1(n) + bm−1(n − 1)
we obtain the basic stage of the Lattice inverse filter representation.
29 / 34

PREDICTION, PREDICTOR, PREDICTION ERRORFORWARD and BACKWARD prediction
Levinson – Durbin algorithmLattice filters
New AR parametrization: Reflection coefficients
Lattice Inverse filter and its use as a Synthesis filter
30 / 34

PREDICTION, PREDICTOR, PREDICTION ERRORFORWARD and BACKWARD prediction
Levinson – Durbin algorithmLattice filters
New AR parametrization: Reflection coefficients
Burg estimation algorithm (not for exam)
I The optimum design of the lattice filter is a decoupled problem.At stage m the optimality criterion is:
Jm = E [f 2m(n)] + E [b2m(n)]
and using the stage m equations
fm(n) = fm−1(n) + Γmbm−1(n − 1)
bm(n) = bm−1(n − 1) + Γmfm−1(n)
Jm = E [f 2m(n)] + E [b2m(n)] = E [(fm−1(n) + Γmbm−1(n − 1))2] + E [(bm−1(n − 1) + Γmfm−1(n))2]
= E [(f 2m−1(n) + b2m−1(n − 1)](1 + Γ2m) + 4ΓmE [bm−1(n − 1)fm−1(n)]
Taking now the derivative with respect to Γm of the above criterion we obtain
d(Jm)
dΓm= 2E [(f 2m−1(n) + b2m−1(n − 1)]Γm + 4E [bm−1(n − 1)fm−1(n)] = 0
and therefore
Γ∗m = −2E [bm−1(n − 1)fm−1(n)]
E [(f 2m−1(n)] + E [b2m−1(n − 1)]
31 / 34

PREDICTION, PREDICTOR, PREDICTION ERRORFORWARD and BACKWARD prediction
Levinson – Durbin algorithmLattice filters
New AR parametrization: Reflection coefficients
Burg estimation algorithm (not for exam)
I Replacing the expectation operator E with time average operator 1N
∑Nn=1 we obtain one direct way to
estimate the parameters of the lattice filter, starting from the data available in lattice filter:
Γm = −2∑N
n=1 bm−1(n − 1)fm−1(n)∑Nn=1[(f
2m−1(n) + b2m−1(n − 1)]
The parameters Γ1, . . . , ΓM can be found solving first for Γ1, then using Γ1 to filter the data u(n) andobtain f1(n) and b1(n), then find the estimate of Γ2 ....There are other possible estimators, but Burg estimator ensures the condition |Γ| < 1 which is required forthe stability of the lattice filter.
32 / 34

PREDICTION, PREDICTOR, PREDICTION ERRORFORWARD and BACKWARD prediction
Levinson – Durbin algorithmLattice filters
New AR parametrization: Reflection coefficients
Gradient Adaptive Lattice Filters (not for exam)
I Imposing the same optimality criterion as in Burg method
Jm = E [f 2m(n)] + E [b2m(n)]
the gradient method applied to the lattice filter parameter at stage m is
d(Jm)
dΓm= 2E [fm(n)bm−1(n − 1) + fm−1(n)bm(n)]
and can be approximated (as usually in LMS algorithms) by
∇Jm ≈ 2[fm(n)bm−1(n − 1) + fm−1(n)bm(n)]
We obtain the updating equation for the parameter Γm
Γm(n + 1) = Γm(n) −1
2µm(n)∇Jm = Γm(n) − µm(n)(fm(n)bm−1(n − 1) + fm−1(n)bm(n))
In order to normalize the adaptation step, the following value of µm(n) was suggested
µm(n) =1
ξm−1(n)
where
ξm−1(N) =N∑i=1
[(f 2m−1(i) + b2m−1(i − 1)] = ξm−1(N − 1) + f 2m−1(N) + b2m−1(N − 1)
represents the total energy of forward and backward prediction errors.33 / 34

PREDICTION, PREDICTOR, PREDICTION ERRORFORWARD and BACKWARD prediction
Levinson – Durbin algorithmLattice filters
New AR parametrization: Reflection coefficients
Gradient Adaptive Lattice Filters
I We can introduce a forgetting factor using
ξm−1(n) = βξm−1(n − 1) + (1 − β)[f 2m−1(n) + b2m−1(n − 1)]
with the forgetting factor close to 1, but 0 < β < 1 allowing to forget the old history, which may beirrelevant if the filtered signal is nonstationary.
34 / 34