Embed Size (px)
Citation preview

1Numerical geometry of non-rigid shapes Shape reconstruction and inverse problems
Shape reconstruction and inverse problems
Lecture 9
© Alexander & Michael Bronsteintosca.cs.technion.ac.il/book
Numerical geometry of non-rigid shapesStanford University, Winter 2009

2Numerical geometry of non-rigid shapes Shape reconstruction and inverse problems

3Numerical geometry of non-rigid shapes Shape reconstruction and inverse problems
Measurement
Shape space Measurement space
Projection

4Numerical geometry of non-rigid shapes Shape reconstruction and inverse problems
Reconstruction
?Find Given
Shape space Measurement space

5Numerical geometry of non-rigid shapes Shape reconstruction and inverse problems
Reconstruction
Shape space Measurement space

6Numerical geometry of non-rigid shapes Shape reconstruction and inverse problems
Inverse problems
Reconstruct the shape by minimizing the distance between
given measurement and measurement obtained from shape
Given a (possibly noisy) measurement of unknown shape

7Numerical geometry of non-rigid shapes Shape reconstruction and inverse problems
Inverse problems

8Numerical geometry of non-rigid shapes Shape reconstruction and inverse problems
Ill-posedness
Many shapes have the
same measurement!
Shape space Measurement space

9Numerical geometry of non-rigid shapes Shape reconstruction and inverse problems
Prior knowledge
We know that the measurements come from
deformations of the same object!

10Numerical geometry of non-rigid shapes Shape reconstruction and inverse problems
Regularization
Deformations of the dog shape
Shape space Measurement space

11Numerical geometry of non-rigid shapes Shape reconstruction and inverse problems
Shape space Measurement space
Prior
Devir, Rosman, Bronstein, Bronstein, Kimmel, 2009
Regularization

12Numerical geometry of non-rigid shapes Shape reconstruction and inverse problems
Inverse problems with intrinsic prior
Prior is given on the intrinsic geometry of the shape (intrinsic prior)
Error = distance between measurements
Regularization = intrinsic distance from prior shape
Prior shape is a deformation of the shape we need to reconstruct
Devir, Rosman, Bronstein, Bronstein, Kimmel, 2009
Error Regularization

13Numerical geometry of non-rigid shapes Shape reconstruction and inverse problems
Solution of inverse problems with intrinsic prior
Devir, Rosman, Bronstein, Bronstein, Kimmel, 2009
Optimization variable: shape , represented as a set of
coordinates
Possible initialization: prior shape
Gradients of and w.r.t. are required
Does it sound familiar?

14Numerical geometry of non-rigid shapes Shape reconstruction and inverse problems
Intrinsic dissimilarity
Ext
rinsi
c di
ssim
ilarit
y

15Numerical geometry of non-rigid shapes Shape reconstruction and inverse problems
Joint similarity as inverse problem
Measurement space = shape space
Identity projection operator
= intrinsic distance on shape space
= extrinsic distance on measurement space
Prior = the shape itself

16Numerical geometry of non-rigid shapes Shape reconstruction and inverse problems
Computation of the regularization term
A. Bronstein, M. Bronstein, R. Kimmel, ICCV 2007
Assume shape = deformation of prior with the same connectivity
Trivial correspondence
Compute L2 distortion of geodesic distances
and gradient
is a fixed (precomputed) matrix of geodesic distances on
depends on the variables (must be updated on every iteration)

17Numerical geometry of non-rigid shapes Shape reconstruction and inverse problems
Computation of using Dijkstra’s algorithm
A. Bronstein, M. Bronstein, R. Kimmel, ICCV 2007
Same approach as in joint similarity
Compute and fix the path of the geodesic
is a matrix of Euclidean distances between adjacent vertices
is a linear operator integrating the path length along fixed path
At each iteration, only changes
Computation of is straightforward

18Numerical geometry of non-rigid shapes Shape reconstruction and inverse problems
Inconsistency of Dijkstra’s algorithm
Number of points
1
1.1
1.05
Dijkstra/Analytic
FMM/Analytic
Devir, Rosman, Bronstein, Bronstein, Kimmel, 2009

19Numerical geometry of non-rigid shapes Shape reconstruction and inverse problems
Computation of using Fast Marching
Devir, Rosman, Bronstein, Bronstein, Kimmel, 2009
Standard FMM FMM with derivativepropagation
Distance update Distance update
Distance derivative update

20Numerical geometry of non-rigid shapes Shape reconstruction and inverse problems
Shape-from-X
Shading Stereo
Silhouette Sparse points Image

21Numerical geometry of non-rigid shapes Shape reconstruction and inverse problems
Denoising
Measurement space = shape space
Identity projection operator
= intrinsic distance on shape space
= extrinsic distance on measurement space
Noisy measurement

22Numerical geometry of non-rigid shapes Shape reconstruction and inverse problems
Denoising
Unknown shape
Prior Measurement Reconstruction(without prior)
Devir, Rosman, Bronstein, Bronstein, Kimmel, 2009

23Numerical geometry of non-rigid shapes Shape reconstruction and inverse problems
Denoising
Unknown shape
Prior Measurement Reconstruction(with prior)
Devir, Rosman, Bronstein, Bronstein, Kimmel, 2009

24Numerical geometry of non-rigid shapes Shape reconstruction and inverse problems
Bundle adjustment
Shape Noisy measurement
Devir, Rosman, Bronstein, Bronstein, Kimmel, 2009
Clean measurement

25Numerical geometry of non-rigid shapes Shape reconstruction and inverse problems
Measurement space of 2D point clouds
Projection operator
(assuming known correspondence)
Noisy measurement
Bundle adjustment

26Numerical geometry of non-rigid shapes Shape reconstruction and inverse problems
Unknown shape
Prior Measurement Reconstruction(without prior)
Devir, Rosman, Bronstein, Bronstein, Kimmel, 2009
Bundle adjustment

27Numerical geometry of non-rigid shapes Shape reconstruction and inverse problems
Unknown shape
Prior Measurement
Devir, Rosman, Bronstein, Bronstein, Kimmel, 2009
Reconstruction(with prior)
Bundle adjustment
28Numerical geometry of non-rigid shapes Shape reconstruction and inverse problems
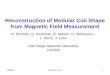
Shape-to-image matching
Measured image Reconstruction
Salzmann, Pilet, Ilic, Fua, 2007