Embed Size (px)
Citation preview
1
INTRODUCTION
Overview
The aim of virtual human development is to create a digital representation of a
living human which exists within a computer. This tool, which is based on anatomically
accurate models and realistic actions, will provide valuable feedback for designers,
engineers, scientists, and doctors regarding how people will react or interact with new
products, different environments, or anything else which can be presented in a digital
form. While a complete representation of a human in a digital world is still a ways off
there are currently significant advances being made in the development of an interactive
real time virtual human. This is largely due to the convergence and development of
several areas of knowledge, primarily engineering, gaming, and computer science. One
lab that is very active in the development of virtual humans is the Virtual Soldier
Research lab at the University of Iowa who is developing Santos™.
Past Work
Mechanical models of the shoulder started out as simplified two-dimensional
models that simply analyzed humeral movement with respect to a non-moving scapula
(DeLuca and Forrest, 1973; Poppins an dWalker, 1978). About the same time Dvir and
Berme as well as Jackson et al also published literature that presented shoulder models,
which were also confined to single motion patterns (Dvir and Berme, 1978; Jackson et al,
1977).
In 1987 Hogfors et al published a paper that presented a kinematic description of
the shoulder, which consisted of three rigid bodies having 12 DOF (Hogfors et al, 1987).
Muscles were modeled as a system of ideal strings, which were derived from dissection
of four shoulder specimens.
Van der Helm and Veenbaas published a paper in 1991 regarding the mechanical
effect of muscles with large attachment sites and how it applies to the shoulder

2
mechanism (Helm and Veenbaas, 1991). They analyzed the mechanical properties of
several muscles about the shoulder that have large attachment sites by modeling each
muscle as 200 action lines. They then reduced the number of action lines to six and
calculated the resulting error. Three years later van der Helm published another paper
detailing an extensive finite element musculoskeletal model of the shoulder (Helm,
1994). This model consisted of four bones, three joints, 20 muscles, and three ligaments.
Input for the model was joint angles and external load while the output was muscle force
as predicted by one of four different optimization criteria.
Raikova also published two papers in the early 90’s concerning modeling the
upper arm. In his first paper he presents a general approach for modeling the upper limb
(Raikova, 1992). This paper presented methods for modeling the muscle action lines and
various optimization criteria. In his second paper he applied the methods presented in his
previous paper to the elbow (Raikova, 1996).
In 1997 Veeger et al published a technical note in the Journal of Biomechanics
that detailed parameters useful for modeling the upper extremity. These parameters,
which were calculated from four fresh cadavers, included the kinematic data of the gleno-
humeral, ulna-humeral, and unla-radialis joint along with muscle length, volume, PCSA,
origin and insertion.
Up until the mid ’90 all the models presented were essentially mathematical
models that were not concerned with representing the musculoskeletal system as a
realistic 3D geometric model. However, with the advances medical imaging technology,
accurate models of skeletal system were become more readily available as well as the
computer graphics to display them. In 1995 Delp and Loan published a paper where they
presented a software tool called SIMM that allowed users to create, modify, and evaluate
various musculoskeletal modes (Delp and Loan, 1995). With this software the user was
allowed to graphically interact with the skeleton.
3
A year later Maurel et al. presented another model of the upper limb that included
a realistic graphical representation of the arm specifically designed for dynamic
simulation (Maurel et al, 1996). This model was created as part of the European Esprit
Project CHARM. This paper was followed up by another paper by Maurel and Thalmann
1999 where a case study of modeling the arm was presented (Maurel and Thalmann,
1999).
Recently, Chao presented a new graphical musculoskeletal model (Chao, 2003).
This paper discussed a new software tool called VIMS, which is similar to SIMM.
Currently there are several commercial musculoskeletal models on the market.
These include SIMM, VIMS, AnyBody, and LifeMOD. One of the key differences
between the model presented in this thesis and the ones currently available is that our
model is focused on real time interaction. By this we mean that there is no obvious delay
between user input and the model’s output.
Objectives
• To create a 3D musculoskeletal model in a digital format which is kinematically
correct
• To investigate the muscle activation levels of the shoulder complex and upper
extremity during motion
• To investigate the muscle activation levels of the shoulder complex and upper
extremity during varying torque loads at the joints
• To develop a real time simulation completely interactive for better understanding
load distributions and torque analysis on the shoulder complex and upper
extremity
• To integrate optimization techniques and real time simulation methods into one
system that allows for complete interactivity of the musculoskeletal system by the
user

4
• To investigate the modeling and simulation of muscle wrapping over underlying
anatomical structures in real time
• To develop a graphical user interface for tracking and monitoring of muscle
activation levels, moment arms, and available torque for all the muscles in the
shoulder girdle and upper extremity, not including the hand
• To demonstrate that the results of the simulation are consistent with those
obtained from anatomy, experiments, and available in literature
Conclusion
This chapter has presented the objectives of this project and some of the previous
work that has been found in the literature. The next chapter will discuss some background
information before the problem formulation is presented in chapter 3.

5
TERMINOLOGY, METHODS AND MATHEMATICS
This thesis will present the formulation of a three-dimensional model of a human
arm that allows real time interaction and muscle activity prediction. The description of
this formulation will require the knowledge of various terminology, methods, and
mathematics, which this chapter will provide a quick review of.
Nomenclature
x : Scalar
x : Vector
x : Unit vector of x
x : Magnitude of x
yx × : Cross product
T : Torque vector
r : Vector indicating a radius
F : Force vector
ai: Activation level of the ith muscle
2,1 gg : Position vectors indicating a guide point on the scapula
ivp : Via point
I : Muscle insertion point
O : Muscle origin point
oi TT , : Tangent points
σmax: Max muscle stress
Medical Terminology
Throughout this thesis we will be describing various aspects of the body, which
will employ the use of standard medical terminology. For spatial positioning, notation as
shown in Figure 0.1 is standard where the origin of x1, x2, and x3 are at the body center of

6
gravity. The term inferior refers to a position closer to the feet while superior indicates it
is closer to the head. Anterior indicats a position towards the front of the body while
posterior indicated it is towards the back. Not shown are the terms proximal and distal,
which indicate something is closer or further from the center or midline of the body. For
example, the hand is distal the elbow while the shoulder is proximal to the elbow.
Figure 0.1: Primary planes of the body used for spatial description
Source: Tozeren, A., (2000) Human Body Dynamic, N.Y.: Springer-Verlag
Anatomical movement is described in Figure 0.2. Flexion is used to describe the
act of bending a joint so as to decreases the angle between the two bones of the limb at
that joint while extension describes increasing that angle. Pronation and supination will
be primarily used to describe the orientation of the palm where, if in the neutral position,
pronation faces the palm to the back while supination faces the palm towards the front.
Abduction is used to describe the movement of a limb away from the midline of the body
while adduction moves it towards the midline.

7
Figure 0.2: Notation describing anatomical movement
Source: Tozeren, A., (2000) Human Body Dynamic, N.Y.: Springer-Verlag
Finally, while describing the muscles the terms insertion and origin are used. Both
described locations where the muscle attaches to the skeletal system. Typically, when
describing the muscles of the arm, the origin is on a bone that is proximal to the bone
where the insertion is located. Some muscles such as the biceps or the triceps have
multiple origins. In our formulation these will be treated as separate muscles.
Terminology
Several terms, which will be used throughout this thesis, are defined as follows.
8
• Geometric Model: A 3D digital representation of a particular object that is created
from an arrangement of vertices and polygons.
• Interactivity: The ability to interact with a system
• Interface: The method in which the user interacts with the system and receives
feedback
• Muscle Activation: A number ranging from 0 to 1 which describes the activation
level of a particular muscle where 0 indicates no activation and 1 indicate full
activation
• Musculoskeletal System: The biological systems consisting of the skeleton and
muscles acting on that skeleton
• PCSA: The physical cross sectional area of a muscle which can be found in
literature
• Real time: The user is able to apply input to a system and the system immediately
responds with output
• Simulation: A program running on a computer which simulates a scenario in
which the user provided input and receives feedback
Optimization
This thesis will present a method for predicting the muscle activation and load
sharing of muscles to create a specific torque about a joint. However, because of the
complexity of the musculoskeletal system and the redundancy of muscles, special
techniques are needed to predict the loading. Our proposed solution is to employ
optimization. An optimization formulation is composed of three parts. The first is the cost
function, which is simply a function whose value will be minimized. The second is the
design variables. These are the variables that are changed so that the value of the cost
function changes. Last are constraints, which are mathematical expressions that create the
boundaries of the problem. These are typically presented as follows

9
Find: Design Variables
Minimize: Cost Function
Subject To: Constraints
Different optimization algorithms use different methods or procedures to find a
minimum but what essentially happens is the design variables are changed and then the
cost function is evaluated. Then the design variables are changed again while enforcing
the constraints. How the design variables are changed depends on the evaluation of the
cost function and the method of optimization used. This process keeps repeating itself
until the cost function is minimized.
In order to keep the optimization algorithm running fast enough to produce real
time results, two steps are takes. The first is to calculate explicit gradients for the
objective functions and the constraints. This reduces computation time by allowing the
gradient-based optimization algorithm to run without having to calculate finite difference
gradients. Computing finite differences can become computationally expensive if many
design variables are used. The second step is to use commercially available software
called SNOPT (Gill et al, 2002). This software uses sequential quadratic programming to
quickly find a local minimum by obtaining search directions from a sequence of
quadratic programming subproblems.
Conclusion
This chapter has presented some background on the terminology and techniques
needed to formulate the problem. The next chapter will present the actual formulation of
the model.
10
PROBLEM FORMULATION
Introduction
The objective of this project is to create a real time three dimensional model of
the human which is appropriate for calculating and prediction mechanical properties such
as joint torques, muscle forces and dynamic movement. In particular, this model is
focused on using inverse dynamics to predict muscle forces from a given set of joint
torques and orientation. However, it is important to note that if the model is created
appropriately it could be used for forward dynamics. In this method the muscles generate
forces and the torque is calculated. In this chapter we will discuss what is needed in the
model for these calculations and the methods we propose to use for calculating muscle
forces.
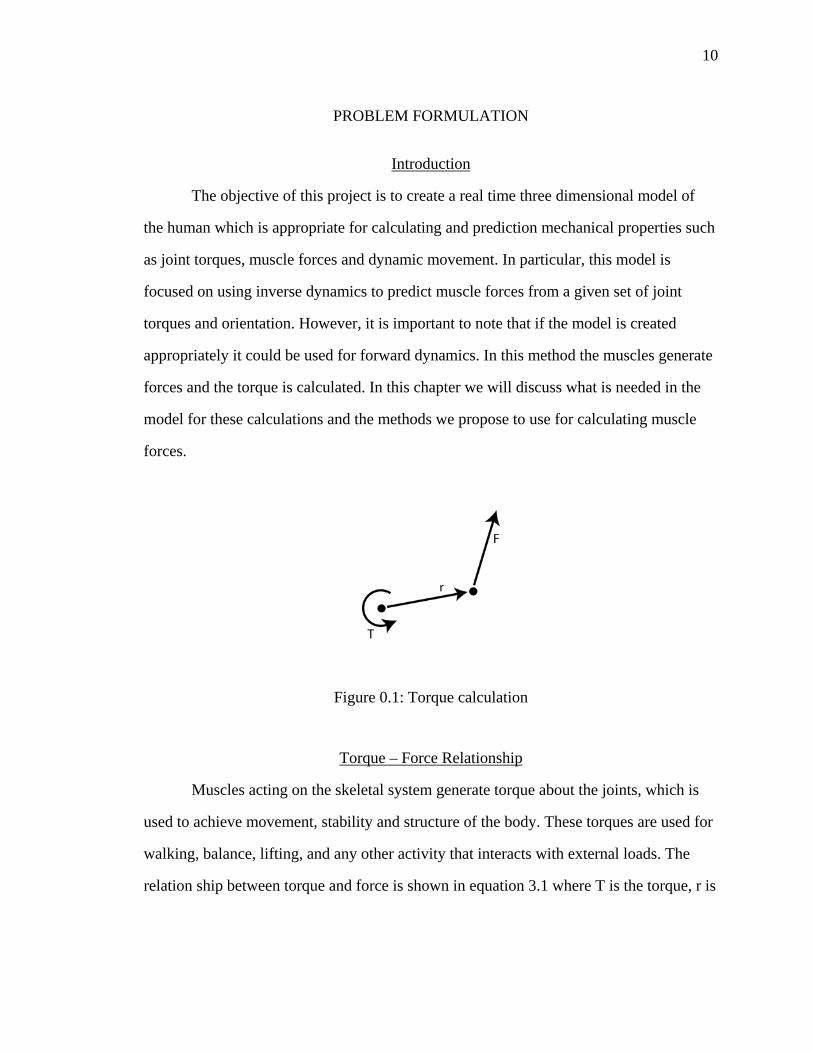
Figure 0.1: Torque calculation
Torque – Force Relationship
Muscles acting on the skeletal system generate torque about the joints, which is
used to achieve movement, stability and structure of the body. These torques are used for
walking, balance, lifting, and any other activity that interacts with external loads. The
relation ship between torque and force is shown in equation 3.1 where T is the torque, r is

11
a vector pointing from the where the torque is being calculated to where the force is being
applied and F is the applied force (Figure 0.1).
FrT ×= (3.1)
As an example, consider a simple beam attached to a fixed surface by a 1 DOF
hinge joint as shown in Figure 0.2. In this example we will consider the joint to be ideal
(frictionless) and the beam to be weightless. If r is given as [4.70, -1.71, 0] and F is
given as [2.59, 9.66, 0] then the torque can be calculated as
[ ] [ ] [ ]NmFrT 83.49,0,00,66.9,59.20,71.1,70.4 =×−=×= (3.2)
Figure 0.2: Example of the force-torque relationship
Figure 0.3: Example of multiple forces creating torque

12
Therefore, 49.83 Nm of torque is being developed about the z-axis of the hinge.
Now lets consider that we want to create 75 Nm of torque about the hinge. If the force
and the bar are still oriented in the same direction, what will the magnitude of the force
need to be? This can be found as
( ) NFFFT 05.15]98.4,0,0[]0,97.0,26.0[]0,71.1,70.4[]75,0,0[ =→=×−== (3.3)
If multiple forces were to act on the bar to total torque generated will simply be a
sum of the torque contributed by each force. Consider the above example but add another
force as shown in Figure 0.3. The torque about the hinge is now calculated by
NmFrFrTTT ]32.63,0,0[]83.49,0,0[]49.13,0,0[221121 =+=×+×=+= (3.4)
So, these two forces create 63.32 Nm of torque about the hinge.
Application of the Torque-Force Relationship to the Body
In this section we will take the torque-force relationship described in the previous
section and demonstrate how it is applied to the human body.
Figure 0.4: Major muscles of the upper arm

13
Musculoskeletal System
The musculoskeletal system is composed of the skeletal system and the skeletal
muscles. This system of muscles and bones is arranged throughout the body as numerous
levers where the bones act as the levers with the joints between them being the fulcrums.
Consider the muscles shown in Figure 0.4. This figure represents some of the major
muscles of the upper arm and illustrates how they are attached to the skeletal system.
Since muscles can only act in tension, each joint requires one set of muscles to
create a positive torque and a separate set to create negative torque. In Figure 0.4, the
elbow extension and flexion muscle groups are identified.
Mechanical System
Consider the simple one muscle model shown in Figure 0.5, which represents the
medial head of the bicep. This muscle originates on the scapula and inserts below the
elbow on the radius. For this simple example only the torque created at the elbow will be
considered. When the muscle is activated it creates a force on the radius. For this simple
example it will be assumed that this force points at the muscle origin (Figure 0.6). This
force creates a torque about the elbow by acting on a moment arm that lies along the
radius.
Figure 0.5: Medial bicep brachii
14
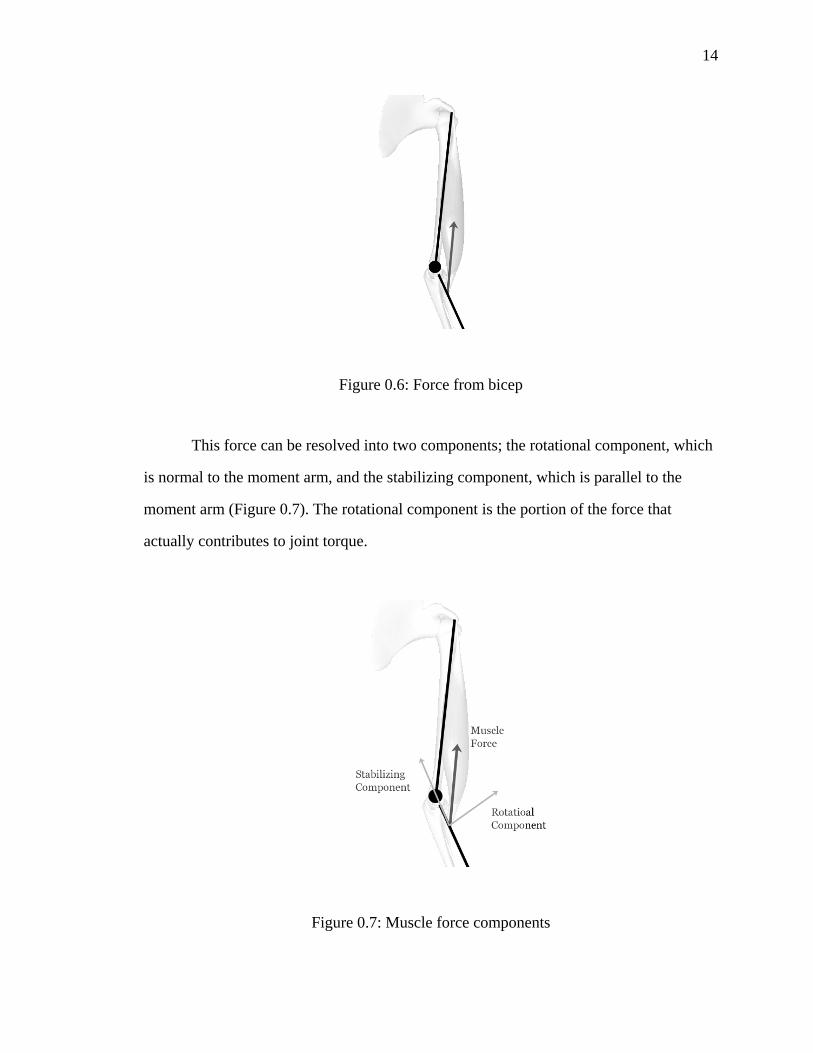
Figure 0.6: Force from bicep
This force can be resolved into two components; the rotational component, which
is normal to the moment arm, and the stabilizing component, which is parallel to the
moment arm (Figure 0.7). The rotational component is the portion of the force that
actually contributes to joint torque.
Figure 0.7: Muscle force components
15
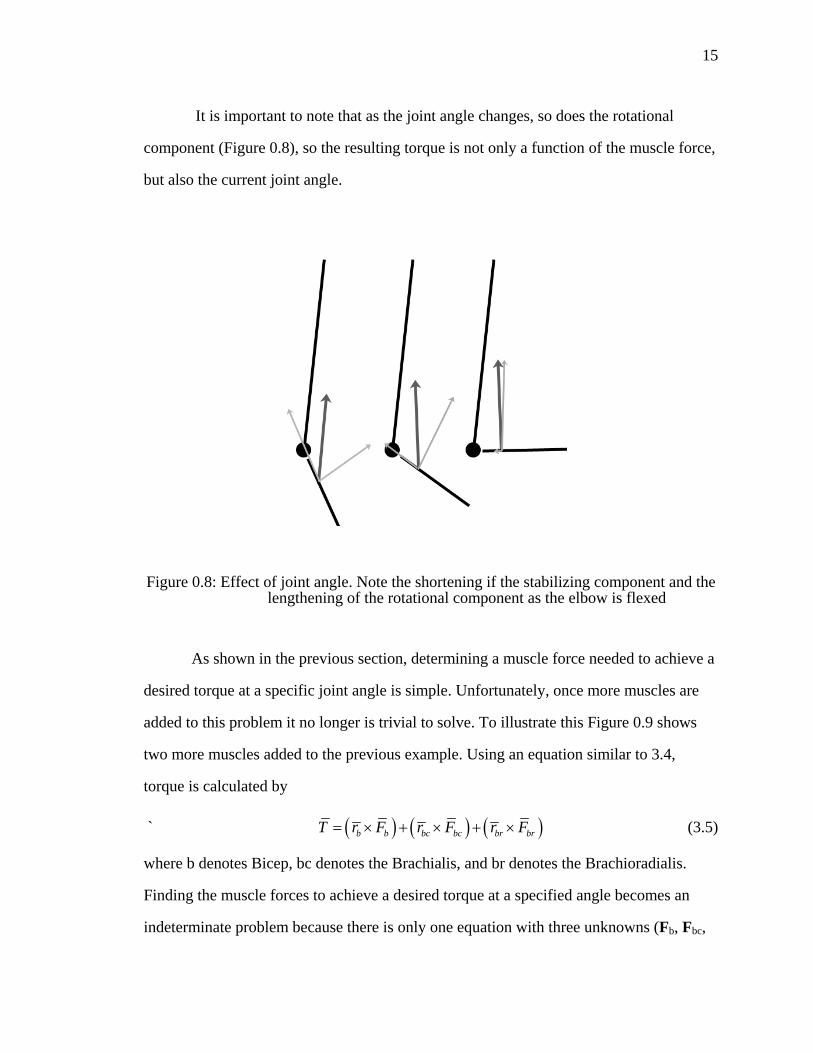
It is important to note that as the joint angle changes, so does the rotational
component (Figure 0.8), so the resulting torque is not only a function of the muscle force,
but also the current joint angle.
Figure 0.8: Effect of joint angle. Note the shortening if the stabilizing component and the lengthening of the rotational component as the elbow is flexed
As shown in the previous section, determining a muscle force needed to achieve a
desired torque at a specific joint angle is simple. Unfortunately, once more muscles are
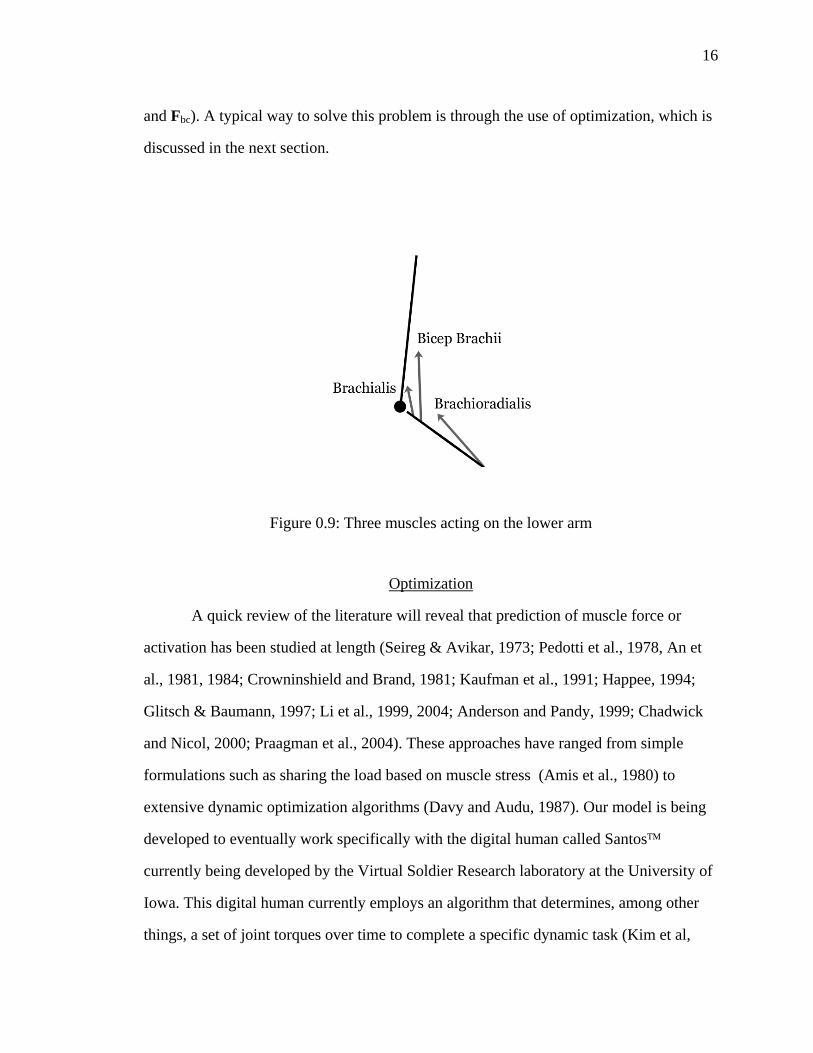
added to this problem it no longer is trivial to solve. To illustrate this Figure 0.9 shows
two more muscles added to the previous example. Using an equation similar to 3.4,
torque is calculated by
` ( ) ( ) ( )b b bc bc br brT r F r F r F= × + × + × (3.5)
where b denotes Bicep, bc denotes the Brachialis, and br denotes the Brachioradialis.
Finding the muscle forces to achieve a desired torque at a specified angle becomes an
indeterminate problem because there is only one equation with three unknowns (Fb, Fbc,
16
and Fbc). A typical way to solve this problem is through the use of optimization, which is
discussed in the next section.
Figure 0.9: Three muscles acting on the lower arm
Optimization
A quick review of the literature will reveal that prediction of muscle force or
activation has been studied at length (Seireg & Avikar, 1973; Pedotti et al., 1978, An et
al., 1981, 1984; Crowninshield and Brand, 1981; Kaufman et al., 1991; Happee, 1994;
Glitsch & Baumann, 1997; Li et al., 1999, 2004; Anderson and Pandy, 1999; Chadwick
and Nicol, 2000; Praagman et al., 2004). These approaches have ranged from simple
formulations such as sharing the load based on muscle stress (Amis et al., 1980) to
extensive dynamic optimization algorithms (Davy and Audu, 1987). Our model is being
developed to eventually work specifically with the digital human called Santos™
currently being developed by the Virtual Soldier Research laboratory at the University of
Iowa. This digital human currently employs an algorithm that determines, among other
things, a set of joint torques over time to complete a specific dynamic task (Kim et al,

17
2005). Because dynamic motion is already incorporated into these joint torques, we are
not concerned with muscle prediction algorithms that include dynamics. Additionally,
real time interaction is desired so we decided to initially develop this model with a simple
static optimization algorithm.
Solving this problem with optimization requires a cost function that will be
minimized while obeying various constraints. There have been many cost functions
proposed and choosing the most appropriate function is likely dependent on the situation.
For example, quick movement to avoid a collision will likely require a different cost
function than a movement that needs to be precise and smooth. For very strenuous
activities, Crowninshield found that minimizing the sum of the muscle stresses while
imposing constraints on how high the stresses can become predicted data the correlated
well with EMG signals (Crowninshield, 1978). Pedotti et al minimized equation 3.6
where fmax was calculated from instantaneous muscle length and muscle velocity of the
shortening and found a correlation with muscles associated with human gait.
∑ ⎟⎟⎠
⎞⎜⎜⎝
⎛=
2
maxif
fU i (3.6)
Crowninshield and Brand later presented equation 3.7 as a cost function where PCSA is
the physical cross sectional areas (Crowninshield and Brand, 1981). According to their
report, this formulation seems to be good for describing activities, which require
prolonged endurance.
3
∑ ⎟⎟⎠
⎞⎜⎜⎝
⎛=
i
i
PCSAfU (3.7)
Many cost functions use muscle activation as variables. Muscle activation is a
value that ranges between 0 and 1 where 0 indicates no muscle activation and 1 indicates
a fully activated muscle. Muscle force can then be defined as
F = a*Fmax (3.8)

18
where a is the activation and Fmax is the maximum theoretical force that muscle can
generate, which can estimated by the muscle’s physical cross sectional area. Torque can
now be represented as
( )max*T r a F= × (3.9)
To simplify the problem, only the torque being generated about the rotational axis of the
elbow will be considered. This allows the torque equation to become
T = r*a* Fmax (3.10)
where r is a constant and Fmax is the rotational component of Fmax. One way this problem
can now be solved is with the following optimization formulation where n is the number
of muscles being considered. Note that this formulation is similar to equation 3.6
Design Variables: a1 … an (3.11)
Minimize: ∑=
=n
iiaJ
1
2 (3.12)
Subject To: ∑=
=n
iiii FarT
1
)max( (3.13)
10 ≤≤ ia (3.14)
Note that by simply adding more torque equation constraints this formulation can
be expanded to cover numerous joints. It should be emphasized that is not our motivation
to determine which cost function is the best but simply create a real time model that can
work with many different formulations so that the user can determine which formulations
they would prefer to use. To illustrate how the muscle forces are predicted using
optimization an example will be presented.
Optimization Example
For this example, ten muscles will be considered. These muscles are the
brachialis, brachioradialis, bicep long, bicep short, tricep lateral, tricep long, tricep

19
medial, pronator teres, supinator, and anconeus. These muscles are used to flex/extend
the forearm and pronate/supinate the hand. Torque about the elbow and the pronating axis
of the wrist are given and the orientation of these joints is known. The objective is to find
the muscle activation level of the ten muscles listed above. This will be accomplished
through optimization as described in the previous section. For this example, the problem
is formulated as follows:
Design Variables: a1…a10
Minimize: 10
2
1i
iJ a
=
= ∑
Subject To: 1BR BL BS PT SUPT T T T T+ + + + =
10BR BCH BL BS TLAT TLON TM PT SUP ANCT T T T T T T T T T+ + + + + + + + + =
0 1ia≤ ≤
Where Tx is the torque generated by that muscle. Note that for this problem, it is
given that the torque about the wrist is 1 Nm and the torque about the elbow is 10 Nm. It
should also be noted that while all the muscle considered contribute some torque to the
elbow, only five contribute torque to the pronation of the hand.
Next the torque generated by each muscle must be calculated. These are
calculated as
maxi i i i iT r x a f= (3.15)
where r is the moment arm, x is the rotational component of the unit vector representing
the force line, a is the activation level, and fmax is the theoretical maximum isotonic force
which that muscle can create. The maximum isotonic force can be calculated by
multiplying the maximum physiological achievable muscle stress (600 kPa) to the
physiological cross sectional area (PSCA) of the muscle (Berme et al., 1987). The torque
equation can then be represented as
*600i i i i iT r x a PSCA= (3.16)
20
Note that r and PSCA are constants while x is dependent on the joint angles and a
is the design variable. Since the joint angles are known, x can be calculated from
geometry while r and PSCA can be found in literature (Maurel and Thalmann, 1999),. For
example, TBR about the elbow can be calculated as
0.0662*0.424* *4.70*600 14.149BRT a a= = (3.17)
So, for the given orientation, the constraint equations can be calculated as
2 3 4 8 90.002 1.281 1.112 ( 0.724) 0.025 1a a a a a+ + + − + = (3.18)
1 2 3 4 5 6 7
8 9 10
14.149 8.670 4.833 4.228 ( 2.640) ( 2.617) ( 2.636)1.230 4.012 0.0112 10
a a a a a a aa a a+ + + + − + − + −
+ + + =(3.19)
Solving the optimization problem in Excel predicts the following activation
levels for each muscle.
• Bracialis: 0.303
• Brachioradialis: 0.186
• Bicep Long: 0.445
• Bicep Short: 0.384
• Tricep Lateral: 0
• Tricep Long: 0
• Tricep Medial: 0
• Pronator Teres: 0
• Supinator: 0.093
• Anconeus: 0
As expected none of the triceps are active because positive torque about the elbow
is required. Similarly, the pronator teres is not active because it will contribute negative
torque about the pronation axis while positive torque is required.

21
Proposed Formulation
Our proposed formulation is quite similar to the example previously presented
except it will incorporate two more joints and 34 action lines representing the muscles of
the arm and shoulder. The problem is defined as follows.
Design Variables: a1…a34
Minimize: ∑=
=34
1
2
iiaJ
Subject To:
SCSC
DorsiUpperLatissimusSC
eDorsiMiddlLatissimusSC
DorsiLowerLatissimusSC
MajorLowerPectoralis
SCMajorUpperPectoralis
SCMinorPectoralis
SCrteriorUppeSerratusAn
SCleteriorMiddSerratusAn
SCrteriorLoweSerratusAn
SCboidsMinorR
SCboidsMajorR
SCpperTrapeziusU
SCiddleTrapeziusM
SCowerTrapeziusL
SCpulaeLevatorSca
TTTTT
TTTTT
TTTTTT
=++++
+++++
+++++ homhom
GHGH
TricepLongGH
BicepLongGH
DorsiLowerLatissimisGH
eDorsiMiddlLatissimis
GHDorsiUpperLatissimis
GHTeresMajor
GHTeresMinor
GHrisSubscapula
GHtusInfraspina
GHateralDeltoidusL
GHnteriorDeltoidusA
GHosteriorDeltoidusP
GHtusSupraspina
GHhialisCoracobrac
GHMajorLowerPectoralis
GHMajorUpperPectoralis
TTTTT
TTTTTT
TTTTTT
+=++++
++++++
+++++
UHzUHz
AnconeusUHzSupinator
UHzSupinator
UHzsonatorTere
UHzialisBrachiorad
UHzralTricepLate
UHzalTricepMedi
UHzTricepLong
UHzBrachialis
UHzBicepShort
UHzBicepLong
TTTTT
TTTTTTT
+=++++
++++++
21Pr
URzURzSupinator
URzsonatorTere
URzdialisBracchiora
URzBicepShort
URzBicepLong TTTTTT =++++ 1Pr
0 1ia≤ ≤ for i=1 to 34
In the above formulations xyT is the torque that muscle y creates about joint x,
which is calculated from equation 3.9. Note that the torques about SC and GH are vectors
while the torques about UH and UR are only considering the torque about the z axis. It
should also be noted that only the torque about the x and z axis of the SC joint will be
considered. Additionally, one can see that torque about the AC joint is not a constraint.
This was decided because normal movement of the shoulder is primarily the rotation of
GH joint about all three of its axes and the rotation of the SC about it’s x and z axes. Any

22
movement about the AC joint is assumed to be used to keep the scapula on the thorax and
rotation of the clavicle about the y axis of the SC joint is considered to be negligible.
Model Requirements
By observing the above formulation for predicting muscle activation levels it can
be observed that two variables will come from the 3D model representing the arm,
regardless of the cost function used. These are the r vector and the direction of the force
vector. Therefore it is imperative that the model be created with careful consideration for
where the muscles originate and insert. It is also important that the action lines of the
muscles be accurate so that the direction of the force being predicted is realistic. This is
complicated by the requirement that the model be interactive in real time. The
development of the model will be addressed in the next chapter. Real time wrapping will
be used to keep the action lines of the muscles in a realistic position, which will be
detailed in chapter 5.

23
MODELING
Introduction
The human body is a complex arrangement of numerous biological systems all
working together in multifarious relationships that science has yet to fully understand. In
this chapter we will explore some of the systems used for motion and then present our
method for creating a real time interactive representation of the human arm. The model
being developed is designed explicitly for prediction of muscle activation levels through
inverse dynamics. Because we are interested in movement, the two main systems of
interest are the skeletal and muscular system and the interaction between them.
Anatomy
The skeletal system is composed of 206 bones, which are divided into two groups,
the axial and the appendicular (Figure 0.1).
Figure 0.1: Axial skeleton (left) and appendicular skeleton (right)
24
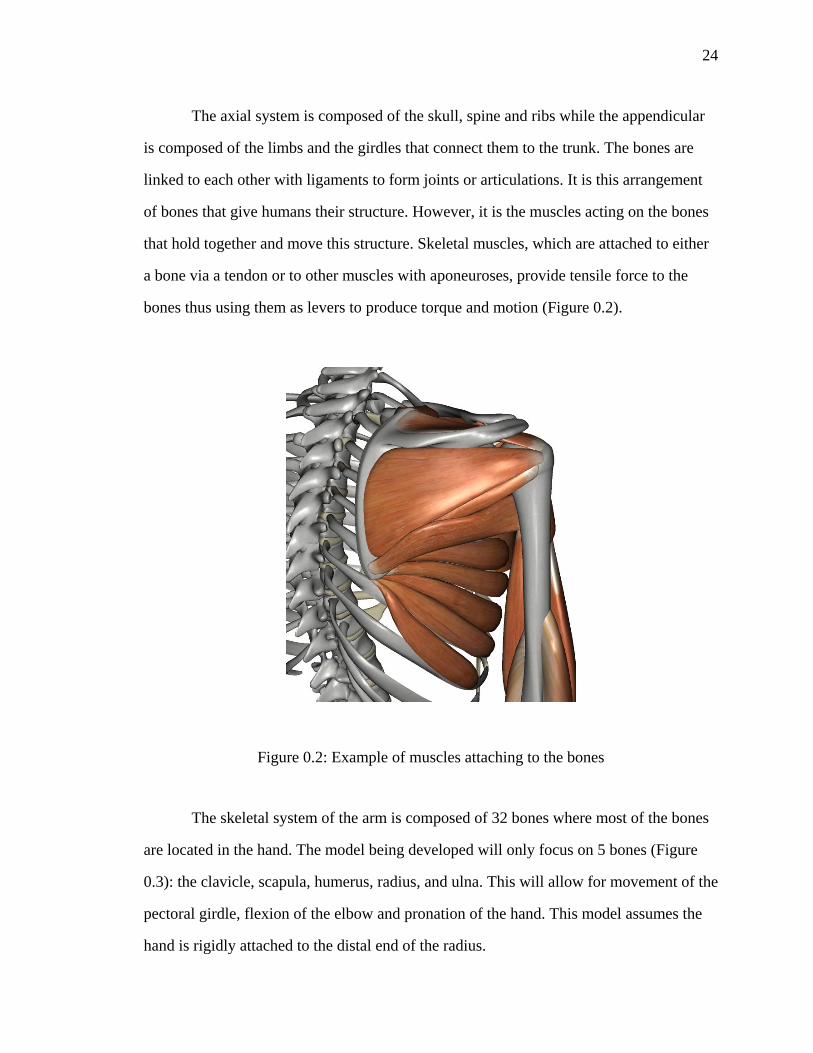
The axial system is composed of the skull, spine and ribs while the appendicular
is composed of the limbs and the girdles that connect them to the trunk. The bones are
linked to each other with ligaments to form joints or articulations. It is this arrangement
of bones that give humans their structure. However, it is the muscles acting on the bones
that hold together and move this structure. Skeletal muscles, which are attached to either
a bone via a tendon or to other muscles with aponeuroses, provide tensile force to the
bones thus using them as levers to produce torque and motion (Figure 0.2).
Figure 0.2: Example of muscles attaching to the bones
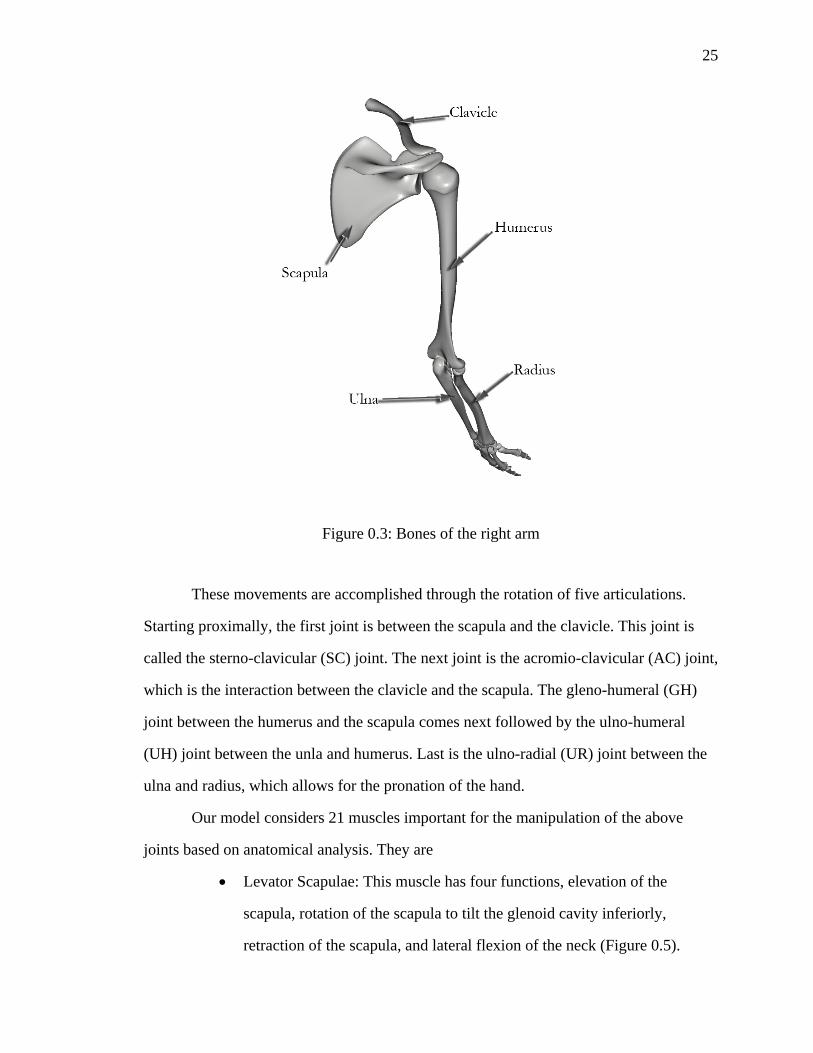
The skeletal system of the arm is composed of 32 bones where most of the bones
are located in the hand. The model being developed will only focus on 5 bones (Figure
0.3): the clavicle, scapula, humerus, radius, and ulna. This will allow for movement of the
pectoral girdle, flexion of the elbow and pronation of the hand. This model assumes the
hand is rigidly attached to the distal end of the radius.
25
Figure 0.3: Bones of the right arm
These movements are accomplished through the rotation of five articulations.
Starting proximally, the first joint is between the scapula and the clavicle. This joint is
called the sterno-clavicular (SC) joint. The next joint is the acromio-clavicular (AC) joint,
which is the interaction between the clavicle and the scapula. The gleno-humeral (GH)
joint between the humerus and the scapula comes next followed by the ulno-humeral
(UH) joint between the unla and humerus. Last is the ulno-radial (UR) joint between the
ulna and radius, which allows for the pronation of the hand.
Our model considers 21 muscles important for the manipulation of the above
joints based on anatomical analysis. They are
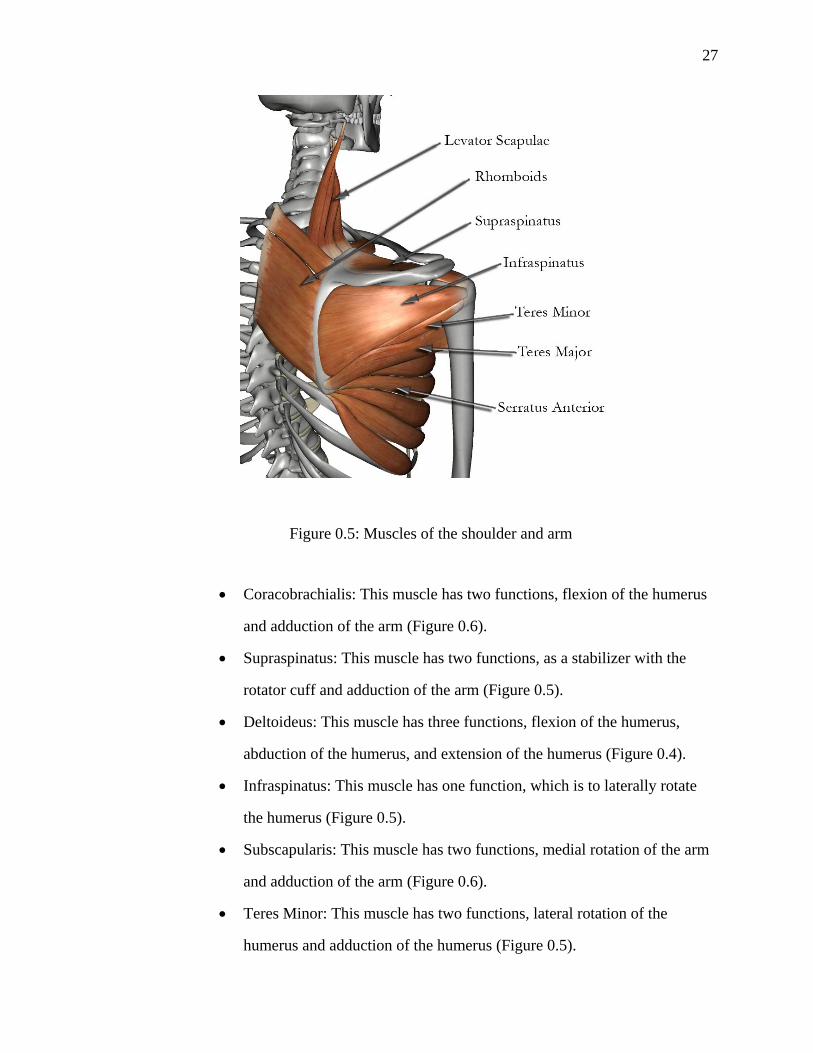
• Levator Scapulae: This muscle has four functions, elevation of the
scapula, rotation of the scapula to tilt the glenoid cavity inferiorly,
retraction of the scapula, and lateral flexion of the neck (Figure 0.5).

26
Figure 0.4: Muscles of the shoulder
• Trapezius: This muscle also has four functions, elevation of the scapula,
retraction of the scapula, depression of the scapula, and superior rotation
of the scapula (Figure 0.4).
• Rhomboids: This muscle has two functions, retraction of the scapula and
rotation of the scapula to depress the glenoid cavity (Figure 0.5).
• Serrratus Anterior: This muscle has two functions, protraction of the
scapula and rotation of the scapula (Figure 0.5 and Figure 0.6).
• Pectoralis Minor; This muscle has two function, inferior drawing of the
scapula and anterior drawing of the scapula (Figure 0.6).
• Pectoralis Major: This muscle has two functions, flexion of the humerus
and adduction and medial rotation of the humerus (Figure 0.7).
27
Figure 0.5: Muscles of the shoulder and arm
• Coracobrachialis: This muscle has two functions, flexion of the humerus
and adduction of the arm (Figure 0.6).
• Supraspinatus: This muscle has two functions, as a stabilizer with the
rotator cuff and adduction of the arm (Figure 0.5).
• Deltoideus: This muscle has three functions, flexion of the humerus,
abduction of the humerus, and extension of the humerus (Figure 0.4).
• Infraspinatus: This muscle has one function, which is to laterally rotate
the humerus (Figure 0.5).
• Subscapularis: This muscle has two functions, medial rotation of the arm
and adduction of the arm (Figure 0.6).
• Teres Minor: This muscle has two functions, lateral rotation of the
humerus and adduction of the humerus (Figure 0.5).

28
Figure 0.6: Muscles of the shoulder and arm
• Teres Major: This muscle has two functions, adduction of the arm and
medial rotation of the humerus (Figure 0.5).
• Latissimus Dorsi: This muscle has three functions, medial rotation of the
arm, extension of the humerus, and adduction of the humerus (Figure
0.4).
• Bicep Brachii: This muscle has two functions, flexion of the forearm and
supination of the forearm (Figure 0.7)..
• Brachialis: This muscle has one function, which is flexion of the forearm
(Figure 0.7).
• Triceps Brachii: These muscles have two functions, extension of the
forearm and adduction of the arm (Figure 0.8).

29
Figure 0.7: Muscles of the shoulder and arm
• Brachioradialis: This muscle has tow functions, flexion of the forearm
and supination of the forearm (Figure 0.7).
• Pronator Teres: This muscle has one function, which is to pronate the
forearm (Figure 0.7).
• Supinator: This muscle has one function, which is to supinate the forearm
(Figure 0.8).
• Anconeus: This muscle has one function, which is to extend the forearm
(Figure 0.8).
Digital Representation of the Arm
The purpose of this model is to predict muscle activation levels based from a
given limb configuration to achieve specified joint torques. The torque achieved by the

30
Figure 0.8: Muscles of the arm
muscles pulling on the bones in lever like arrangements. Therefore it is imperative that
the kinematic model of bones as well as the attachment points and direction of the
muscles be as realistic as possible. To accomplish this many geometric models of the
musculoskeletal system were examined before one was selected. The model selected is
commercially available and was created with careful consideration to true human
anatomy. Once the model was obtained, it was translated to VRML and then imported
into our real time simulation environment. The model contained all the bones and
muscles in the human body. All the bones were removed except for the ribs, sternum,
spine, and bones of the right arm. All the muscles were deleted except for the ones listed
in the previous section, and these were kept for the right arm only.

31
Kinematic Model
Once the appropriate geometric model was imported into the simulation, the
bones had to be arranged into an appropriate kinematic chain. A kinematic chain is
essentially a series of rigid bodies connects by joints. This was accomplished by first
arranging the bones in the appropriate hierarchy. A parent-child relationship is essential
when created a kinematic chain. In this type of relationship, each part can have only one
parent but numerous children. Movement of an object within the hierarchy will affect its
children but not the parent. The ribs, sternum and spine were grouped together and
considered to be the base of the kinematic chain, thus have no parent. The rest of the
bones were arranged the hierarchy shown in Figure 0.9. Because of the hierarchy,
movement of the clavicle will affect all the distal bones in the arm but movement of the
radius will only affect the hand.
Figure 0.9: Hierarchy of the bones in the arm
Once the hierarchy of bones was created the joints between the bones had to be
defined. In a true human joint, most movement is a combination of rolling and sliding
between the bones (Engin, 1984), thus no fixed axis or center of rotation can be found.
However, this movement is generally considered negligible for the arm, so the joints are
modeled either as an ideal ball and socket joint with three degrees of freedom or a hinge
joint with one degree of freedom. Following previous kinematic arm models (Maurel and

32
Thalmann, 1999; Engin, 1980; Helm, 1994; Hogfors et al, 1987; Raikova, 1992) the SC,
AC, and GH joints are modeled as ball and sockets while the UH and UR are modeled as
hinge joints (Figure 0.10).
Figure 0.10: Joints of the arm
One of the more difficult features about modeling the shoulder is how to treat the
scapula and its interaction with the thorax. The scapula is located between the clavicle
and the humerus in the kinematic chain and is constrained to glide across the thorax (Dvir
and Berme, 1978). Because the scapula is nearly completely surrounded by soft tissues,
there are no articular structures between the scapula and the thorax, resulting in the
scapula being able to move in all six degrees of freedom. Since the scapula glides across
the thorax two forms have been proposed to describe this constraint, a dot contact or a

33
linear contact (Maurel and Thalmann, 1999). A dot constraint describes a situation when
one point of an object is constrained to a surface, thus allowing 5DOF. A line constraint
describes a situation when two points of an object are constrained to surface resulting in
4DOF. It was decided that the linear contact constraint is more representative of
movement of the shoulder as described by Dvir and Berme but instead of using an
idealized ellipsoidal thorax as van der Helm did we used the actual geometric model of
the thorax. (Helm, 1994)
Figure 0.11: Guide points on the scapula
To accomplish this we started by first location two frames on the medial edge of
the scapula with their x-axis pointing towards the thorax. These points will be called g1
and g2. A ray is cast along each of the frames x-axis to determine the distance between
the frame and the thorax. Then the scapula is rotated about the SCy until the distance
between g1 and the thorax is within a certain range (Figure 0.12). Then the scapula is
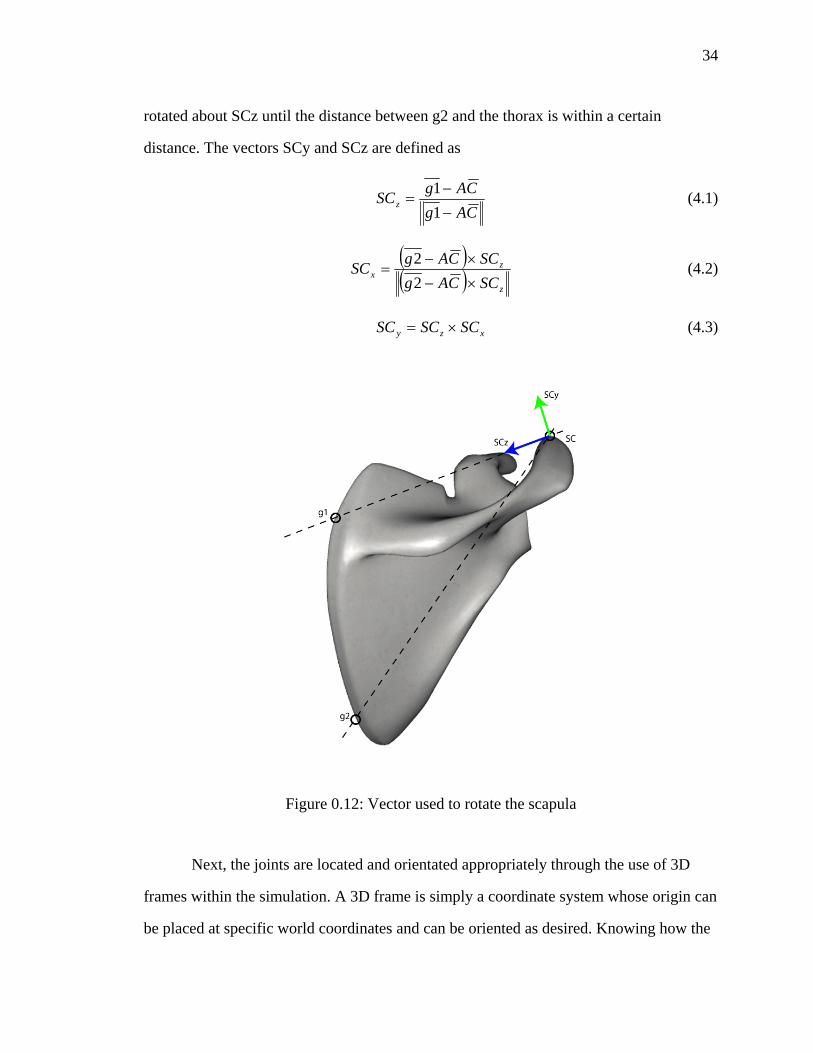
34
rotated about SCz until the distance between g2 and the thorax is within a certain
distance. The vectors SCy and SCz are defined as
CAgCAgSCz
−−
=11 (4.1)
( )( ) z
zx
SCCAgSCCAgSC
×−
×−=
22 (4.2)
xzy SCSCSC ×= (4.3)
Figure 0.12: Vector used to rotate the scapula
Next, the joints are located and orientated appropriately through the use of 3D
frames within the simulation. A 3D frame is simply a coordinate system whose origin can
be placed at specific world coordinates and can be oriented as desired. Knowing how the

35
rotations are going to be described is directly related to how the joint frames will be
placed and oriented. There are many methods for describing how the bones articulate
including bone or joint rotation, global or local coordinates, and local or virtual
references (Helm and Pronk, 1995). The goal of this model is to predict muscle activation
levels from a given torque and joint configuration, which is given as absolute joint
Figure 0.13: Heirarchy of joint frames in a 3DOF joint
Figure 0.14: Euler rotation order for a 3DOF joint. Note that all the frames are separated just for clarity. In the model they coincide.

36
rotation in local coordinates. Therefore, our model will use joint angles defined in the
coordinate system of the parent bone, which requires a reference frame on the bone
proximal to the joint and a local frame, which will actually be rotated. Following the
model presented by Maurel et al our rotations will be described as Euler angles defined to
rotate in the following order: θ about z, φ about y, and ψ about x (Maurel et al, 1996). To
accomplish this in our simulation instead of using a single local frame, three frames are
stacked on top of each other and arranging in the hierarchy shown in Figure 0.13. Then to
achieve a specified orientation local frame 1 is rotated about it’s z-axis by θ, local frame
2 is rotated about it’s y axis by φ, and local frame 3 is rotated about it’s x axis by ψ
(Figure 0.14).
The position of the frames within the simulation was based on the geometric
model and understanding the action of that joint while the frames were oriented based on
a combination of data from literature and observation of the geometric models (Maurel
and Thalman, 1999). For example, the GH joint was positioned in the approximate center
of the head on the humerus. The absolute reference frame for the simulation was oriented
such that Xo is perpendicular to the front plane and the Yo is perpendicular to the side
plane. The rest of the joints were orientated as follows
• Sterno-Clavicular: The reference frame is attached to the sternum and
oriented such that the x is perpendicular to the front plane pointing
forward and the y is perpendicular to the side plane, pointing to the left.
The local frame is attached to the clavicle and orientated such that the y is
a unit vector pointing from the SC to the AC joint and the x is
perpendicular to the y-axis and pointing forward in the clavicular plane
(Figure 0.15).
• Acromio-Clavicular: The reference frame is attached to the clavicle and
orientated such that x is a unit vector pointing from the SC to the AC joint
while the y is perpendicular to the x axis and pointing backwards in the

37
clavicular plane. The local frame is attached to the scapula and is
orientated such that y is perpendicular to the scapluar plane pointing
backwards while the x is aligned with the trigonum spinae of the scapula
(Figure 0.16).
Figure 0.15: Sterno-clavicular reference (left) and local frame (right)
Figure 0.16: Acromio-clavicular reference (left) and local frame (right)

38
• Gleno-Humeral: The reference frame is attached to the scapula with it’s z
perpendicular to the scapular plane pointing forward while the x is aligned
with the trigonum spinae. The local is attached to the humerus with the z
perpendicular to the humeral front plane pointing forward and the y
pointing up along the humeral axis (Figure 0.17).
Figure 0.17: Gleno-humeral reference (left) and local frame (right)
Figure 0.18: Ulno-humeral reference and local frame

39
• Ulno-Humeral: The reference frame is attached to the humerus with the z
as a unit vector pointing from the UH to the HR joint and the x set normal
to a plane created by GH, HR, and UR, pointing forward. The local axis.
The local frame is attached to the ulna and orientated the same as the
reference (Figure 0.18).
Figure 0.19: Ulno-radial reference and local frame
• Ulno-Radial: The reference frame is attached to the ulna and oriented so
the z is a unit vector pointing from the UR to HR while y is normal to a
plane created by HR, UR, and the end of the radius, pointing inward. The
local is attached to the radius and is orientated the same as the reference
(Figure 0.19).
Attaching the Muscles
When attaching the muscles to the kinematic model, two factors are of great
importance. The first is the shape of the muscle, which is dependent on where it attaches
40
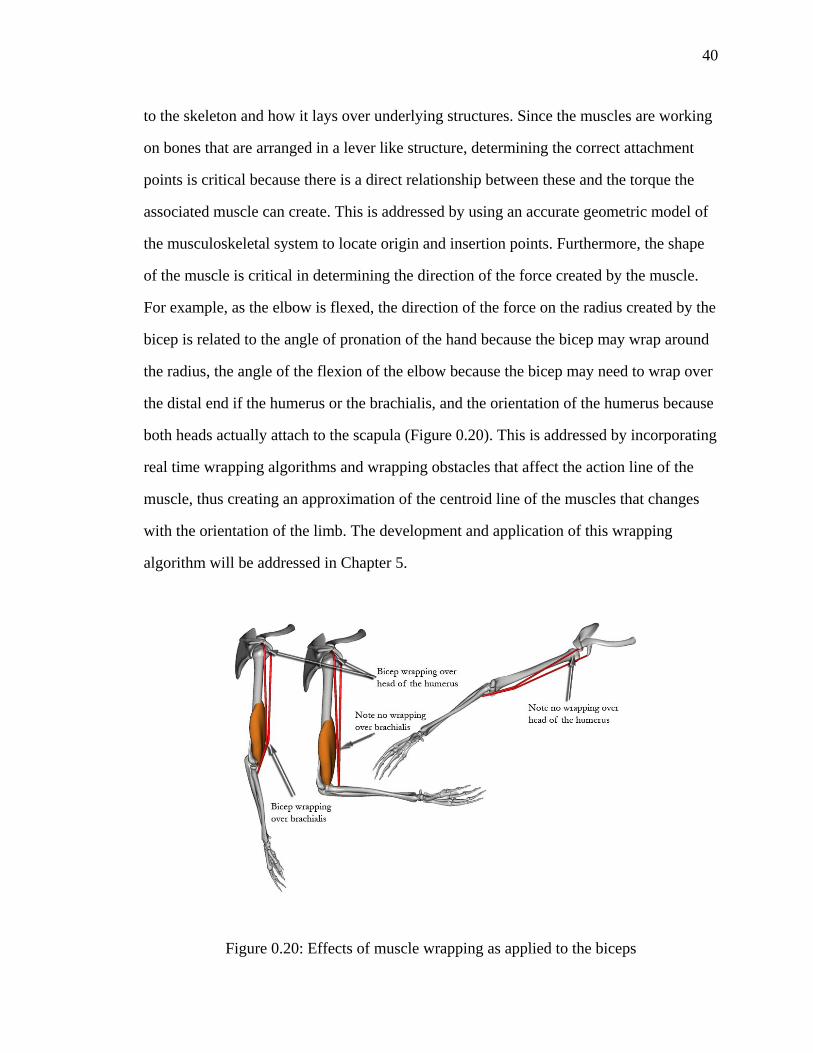
to the skeleton and how it lays over underlying structures. Since the muscles are working
on bones that are arranged in a lever like structure, determining the correct attachment
points is critical because there is a direct relationship between these and the torque the
associated muscle can create. This is addressed by using an accurate geometric model of
the musculoskeletal system to locate origin and insertion points. Furthermore, the shape
of the muscle is critical in determining the direction of the force created by the muscle.
For example, as the elbow is flexed, the direction of the force on the radius created by the
bicep is related to the angle of pronation of the hand because the bicep may wrap around
the radius, the angle of the flexion of the elbow because the bicep may need to wrap over
the distal end if the humerus or the brachialis, and the orientation of the humerus because
both heads actually attach to the scapula (Figure 0.20). This is addressed by incorporating
real time wrapping algorithms and wrapping obstacles that affect the action line of the
muscle, thus creating an approximation of the centroid line of the muscles that changes
with the orientation of the limb. The development and application of this wrapping
algorithm will be addressed in Chapter 5.
Figure 0.20: Effects of muscle wrapping as applied to the biceps
41
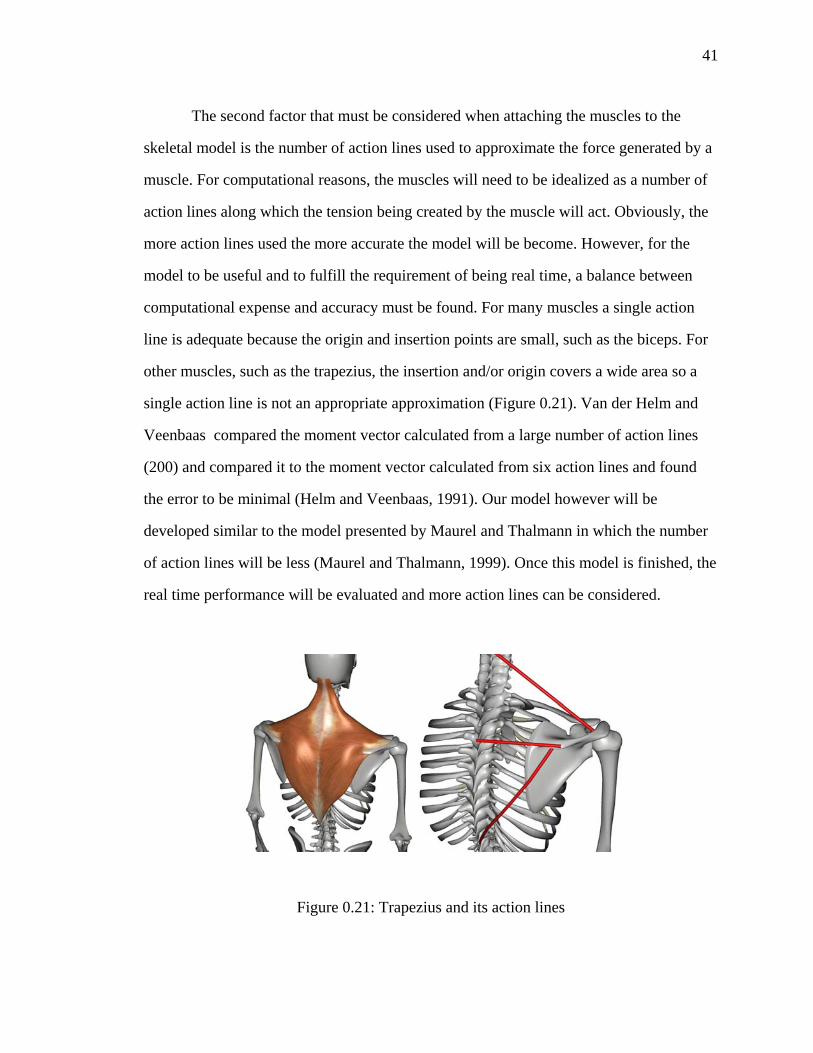
The second factor that must be considered when attaching the muscles to the
skeletal model is the number of action lines used to approximate the force generated by a
muscle. For computational reasons, the muscles will need to be idealized as a number of
action lines along which the tension being created by the muscle will act. Obviously, the
more action lines used the more accurate the model will be become. However, for the
model to be useful and to fulfill the requirement of being real time, a balance between
computational expense and accuracy must be found. For many muscles a single action
line is adequate because the origin and insertion points are small, such as the biceps. For
other muscles, such as the trapezius, the insertion and/or origin covers a wide area so a
single action line is not an appropriate approximation (Figure 0.21). Van der Helm and
Veenbaas compared the moment vector calculated from a large number of action lines
(200) and compared it to the moment vector calculated from six action lines and found
the error to be minimal (Helm and Veenbaas, 1991). Our model however will be
developed similar to the model presented by Maurel and Thalmann in which the number
of action lines will be less (Maurel and Thalmann, 1999). Once this model is finished, the
real time performance will be evaluated and more action lines can be considered.
Figure 0.21: Trapezius and its action lines

42
With the above factors considered, the muscles were modeled as follows.
• Levator Scapulae: This muscle was modeled as a single line running from
the neck to the medial border of the scapula. No wrapping obstacles were
included (Figure 0.22).
Figure 0.22: Levator scapulae muscle and action line
Figure 0.23: Trapezius muscle, action lines and wrapping obstacles

43
• Trapezius: Modeled as three action lines. The first one originated at the
neck and inserted near the AC joint on the scapula. No wrapping was
included for this action line. The second action line originates at the upper
thoracic vertebra and insets on the spine of the scapula. It requires one
wrapping obstacle that is a cylinder for the thorax. The third action line
originates at the lower thoracic vertebra and inserts on the spine of the
scapula. It requires two wrapping obstacles, one cylinder for the thorax
and one cylinder for the medial spine of the scapula (Figure 0.23).
t
Figure 0.24: Rhomboid muscles, action lines and wrapping obstacle
• Rhomboids: Modeled as two action lines, both of which originate on the
spine, insert on the posterior side of the scapula and require a cylinder
obstacle for wrapping around the thorax (Figure 0.24).
• Serrratus Anterior: Modeled as three action lines, all of which originate
on the ribs, insert on the anterior side of the scapula and require a cylinder
obstacle for wrapping around the thorax (Figure 0.25).

44
Figure 0.25: Serratus anterior muscles, action lines and wrapping obstacles
Figure 0.26: Pectoralis minor muscle, action lines and wrapping obstacle
• Pectoralis Minor: Modeled as a singe action line, which originates on the
ribs, inserts on the coracoid process of the scapula and requires a cylinder
obstacle for wrapping around the thorax (Figure 0.26).
• Pectoralis Major: Modeled as two action lines, both of which originate on
the sternum and insert on the humerus. Both require a cylinder obstacle
for wrapping around the thorax and a second cylinder obstacle for
wrapping around the humerus (Figure 0.27).

45
Figure 0.27: Pectoralis major muscle, action lines and wrapping obstacles
Figure 0.28: Coracobrachialis muscle, action line and wrapping obstacle
• Coracobrachialis: Modeled as a singe action line, which originates on the
scapula, inserts on the humerus and requires a cylinder obstacle for
wrapping around the humerus (Figure 0.28).
• Supraspinatus: Modeled as a singe action line, which originates on the
scapula above the spine, inserts on the humeral head and requires a
spherical obstacle for wrapping around the head of the humerus (Figure
0.29).
46
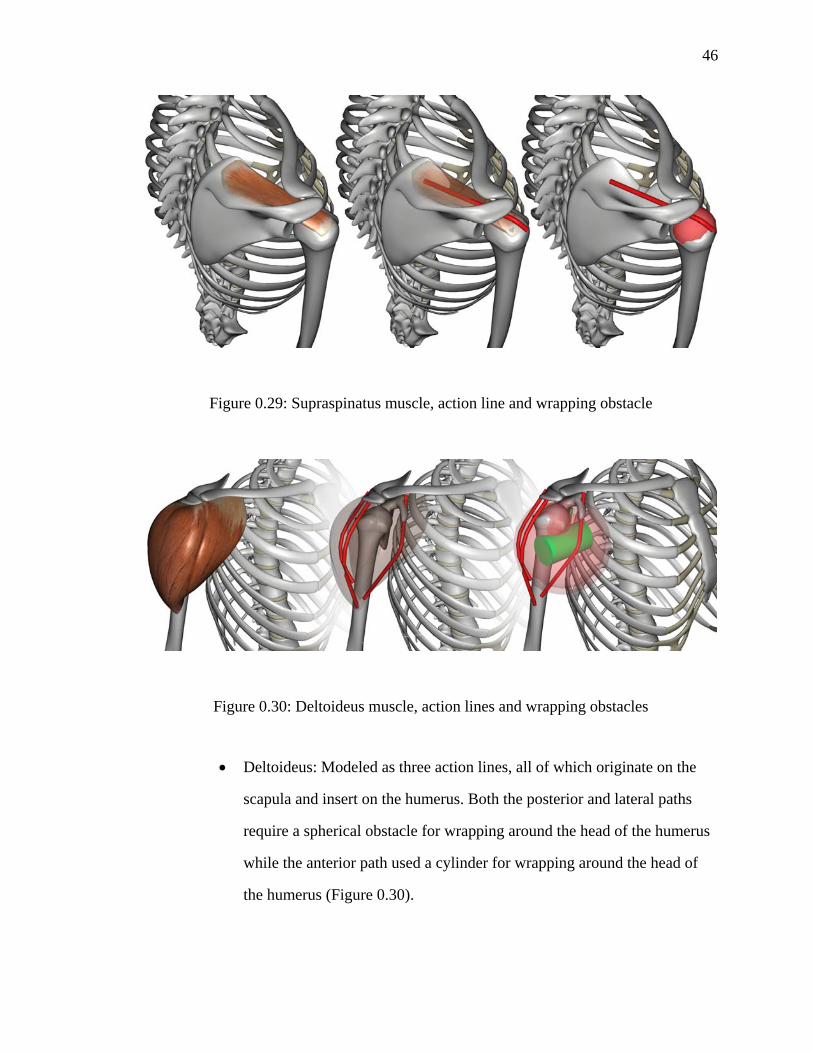
Figure 0.29: Supraspinatus muscle, action line and wrapping obstacle
Figure 0.30: Deltoideus muscle, action lines and wrapping obstacles
• Deltoideus: Modeled as three action lines, all of which originate on the
scapula and insert on the humerus. Both the posterior and lateral paths
require a spherical obstacle for wrapping around the head of the humerus
while the anterior path used a cylinder for wrapping around the head of
the humerus (Figure 0.30).
47
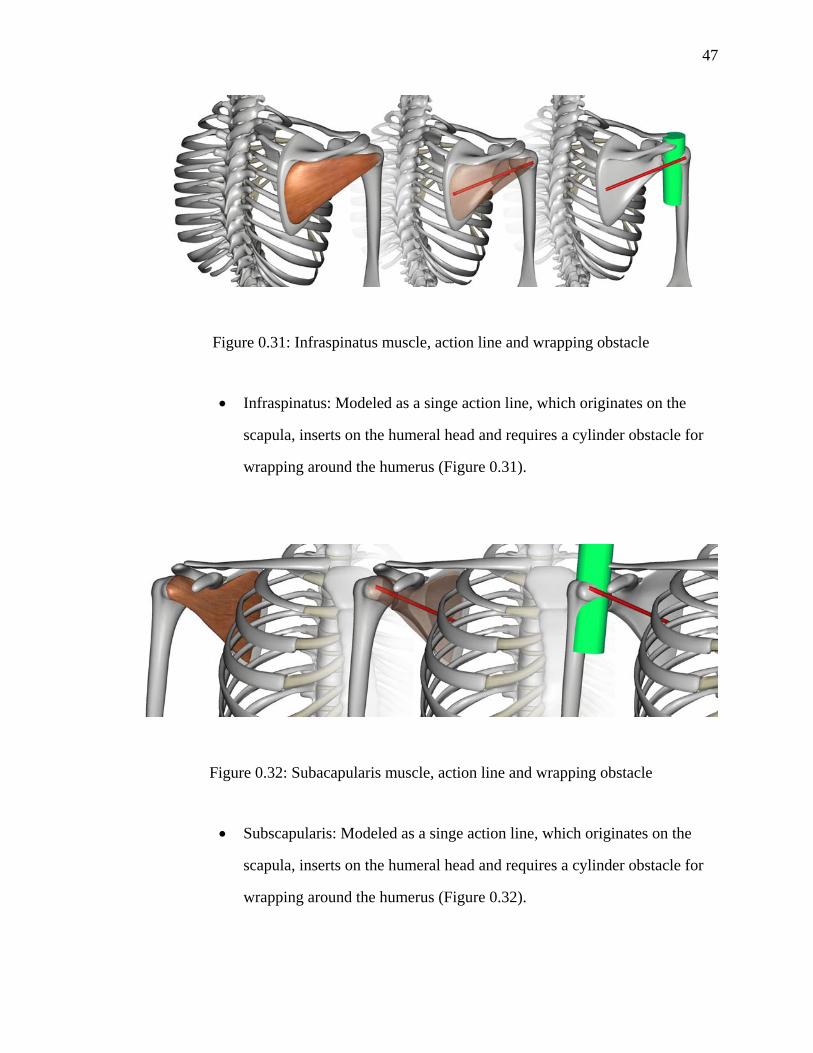
Figure 0.31: Infraspinatus muscle, action line and wrapping obstacle
• Infraspinatus: Modeled as a singe action line, which originates on the
scapula, inserts on the humeral head and requires a cylinder obstacle for
wrapping around the humerus (Figure 0.31).
Figure 0.32: Subacapularis muscle, action line and wrapping obstacle
• Subscapularis: Modeled as a singe action line, which originates on the
scapula, inserts on the humeral head and requires a cylinder obstacle for
wrapping around the humerus (Figure 0.32).

48
Figure 0.33: Teres Minor muscle, action line and wrapping obstacles
• Teres Minor: Modeled as a single action line, which originate on the
scapula, insert on the humeral head. It requires a cylinder obstacle for
wrapping around the humerus and a cylinder obstacle for wrapping over
the lateral spine of the scapula (Figure 0.33).
Figure 0.34: Teres Major muscle, action line and wrapping obstacles

49
• Teres Major: Modeled as a singe action line, which originates on the
scapula and inserts on the humeral head and requires a cylinder obstacle
for wrapping around the humerus (Figure 0.34).
Figure 0.35: Latissimus dorsi muscle, action lines and wrapping obstacles
• Latissimus Dorsi: Modeled as three action lines, two of which originate
on the spine and the third on the thorax. All three insert on the humerus.
All three paths require a cylinder for wrapping around the thorax and a
cylinder for wrapping around the humerus (Figure 0.35).
Figure 0.36: Bicep brachii muscles, action lines and wrapping obstacles
50
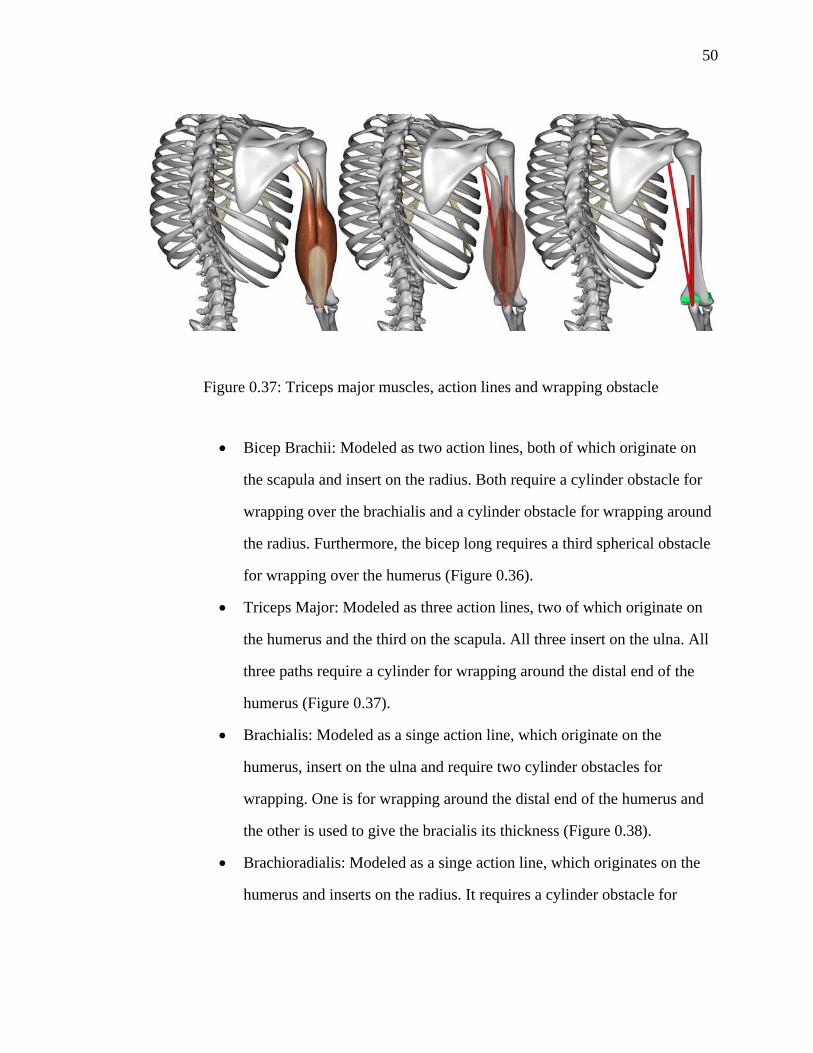
Figure 0.37: Triceps major muscles, action lines and wrapping obstacle
• Bicep Brachii: Modeled as two action lines, both of which originate on
the scapula and insert on the radius. Both require a cylinder obstacle for
wrapping over the brachialis and a cylinder obstacle for wrapping around
the radius. Furthermore, the bicep long requires a third spherical obstacle
for wrapping over the humerus (Figure 0.36).
• Triceps Major: Modeled as three action lines, two of which originate on
the humerus and the third on the scapula. All three insert on the ulna. All
three paths require a cylinder for wrapping around the distal end of the
humerus (Figure 0.37).
• Brachialis: Modeled as a singe action line, which originate on the
humerus, insert on the ulna and require two cylinder obstacles for
wrapping. One is for wrapping around the distal end of the humerus and
the other is used to give the bracialis its thickness (Figure 0.38).
• Brachioradialis: Modeled as a singe action line, which originates on the
humerus and inserts on the radius. It requires a cylinder obstacle for

51
wrapping around the distal end of the humerus and another cylinder for
wrapping over underlying structures in the forearm (Figure 0.39).
Figure 0.38: Brachialis muscle, action line and wrapping obstacles
Figure 0.39: Brachioradialis muscle, action line and wrapping obstacles

52
Figure 0.40: Pronator teres muscle, action line and wrapping obstacles
Figure 0.41: Supinator muscle, action lines and wrapping obstacles
• Pronator Teres: Modeled as a singe action line, which originates on the
humerus and inserts on the radius. It requires a cylinder obstacle for

53
wrapping around the distal end of the humerus and another cylinder for
wrapping over underlying structures in the forearm (Figure 0.40).
• Supinator: Modeled as two action lines, both of which originate on the
radius. One insert on the radius while the second inserts on the ulna. Both
require a cylinder obstacle for wrapping over the distal end of the
humerus and the one that inserts on the radius requires a second cylinder
obstacle for wrapping around the radius (Figure 0.41).
Figure 0.42: Anconeus muscle, action line and wrapping obstacle
• Anconeus: Modeled as a singe action line, which originate on the
humerus, insert on the ulna, and requires a cylinder obstacle for wrapping
around the distal end of the humerus (Figure 0.42).
As a result, 34 action line are used to model the 21 muscles considered. Nearly all
of these muscles require at least one wrapping obstical. The result is shown in
Figure 0.43.

54
Figure 0.43: All modeled action lines
Conclusion
This chapter presented the modeling of the 3D geometric representation of the
arm. This modeling included creating a kinematically correct hierarchy, attaching the
muscles in the appropriate location and placing obstacle as needed for the muscle to wrap
over. The next chapter will formulate the algorithms for allowing the action lines to wrap
over the obstacles.
55
MUSCLE WRAPPING MODEL
Introduction
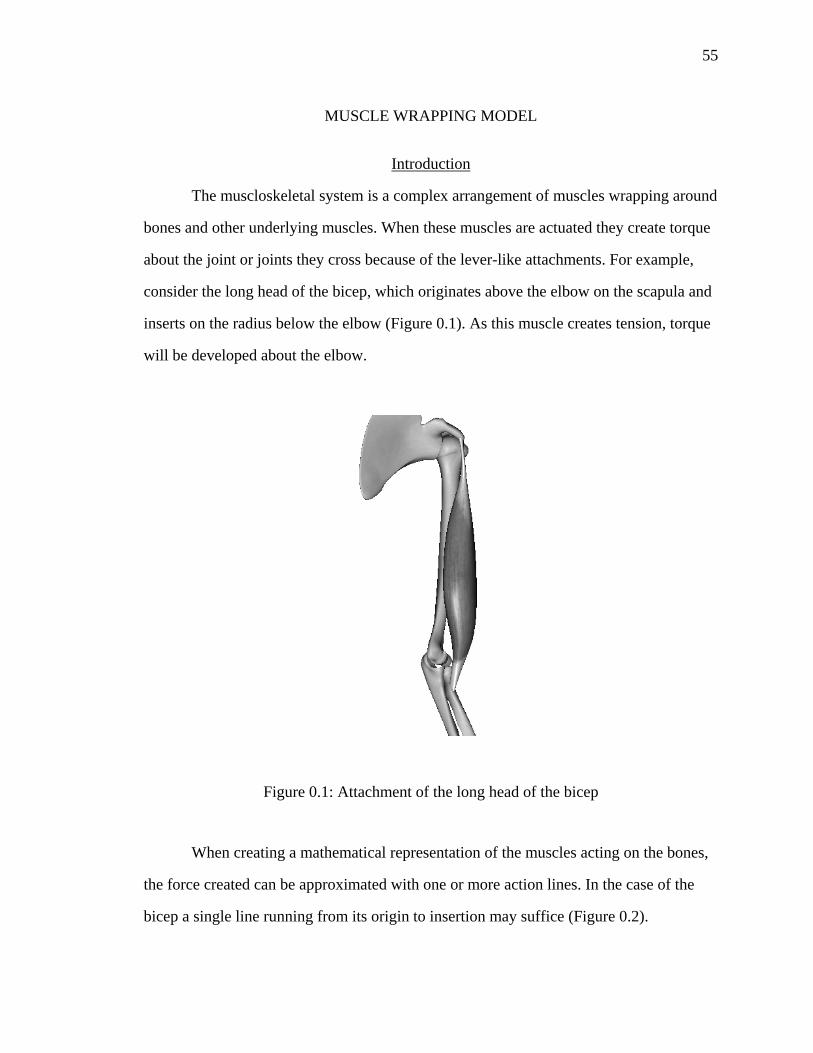
The muscloskeletal system is a complex arrangement of muscles wrapping around
bones and other underlying muscles. When these muscles are actuated they create torque
about the joint or joints they cross because of the lever-like attachments. For example,
consider the long head of the bicep, which originates above the elbow on the scapula and
inserts on the radius below the elbow (Figure 0.1). As this muscle creates tension, torque
will be developed about the elbow.
Figure 0.1: Attachment of the long head of the bicep
When creating a mathematical representation of the muscles acting on the bones,
the force created can be approximated with one or more action lines. In the case of the
bicep a single line running from its origin to insertion may suffice (Figure 0.2).

56
Figure 0.2: Straight line model for the short head of the bicep
Seireg and Arvikar used this simple method of action line modeling in 1973 to
represent a large number of muscles in the leg. “The straight lines have to be chosen to
represent the best approximation for the lines of action in space of the muscular tensile
forces” (Seireg and Avikar, 1973). This simple model may be adequate for some muscles
in certain orientation, but is not nearly robust enough for a real time simulation that
allows the user to interactively orient the limb to any position within the prescribed joint
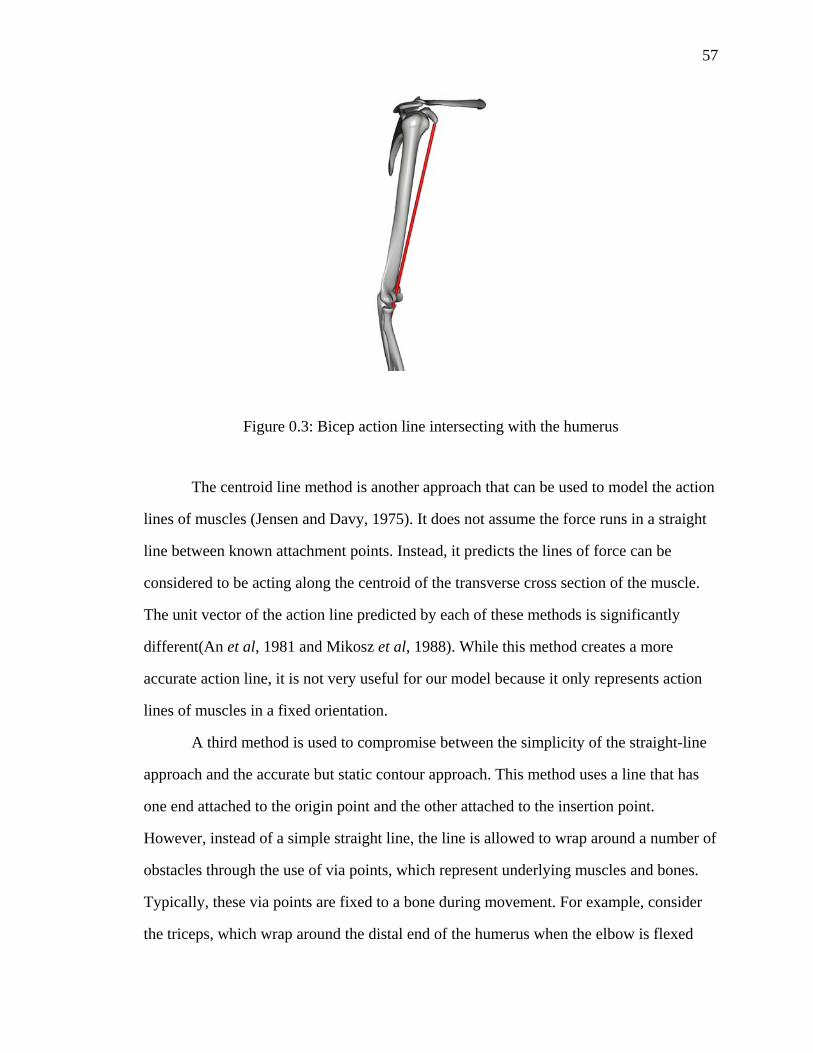
limits. For example, consider the bicep again. In the orientation shown in the Figure 0.1,
a straight line running from the insertion to the origin may be acceptable. However, if the
forearm is fully extended one will note that this same line now passes through the distal
end of the humerus (Figure 0.3). Not only is this physically impossible but any
calculation based on this model would be questionable. Many muscles can never be
modeled as a straight line from origin to insertion. For example, consider the deltoid,
which originates on the scapula and inserts on the humerus after curving over the gleno-
humeral joint. Because of the curved nature of this muscle, representing the action line as
one or more straight lines would be insufficient.
57
Figure 0.3: Bicep action line intersecting with the humerus
The centroid line method is another approach that can be used to model the action
lines of muscles (Jensen and Davy, 1975). It does not assume the force runs in a straight
line between known attachment points. Instead, it predicts the lines of force can be
considered to be acting along the centroid of the transverse cross section of the muscle.
The unit vector of the action line predicted by each of these methods is significantly
different(An et al, 1981 and Mikosz et al, 1988). While this method creates a more
accurate action line, it is not very useful for our model because it only represents action
lines of muscles in a fixed orientation.
A third method is used to compromise between the simplicity of the straight-line
approach and the accurate but static contour approach. This method uses a line that has
one end attached to the origin point and the other attached to the insertion point.
However, instead of a simple straight line, the line is allowed to wrap around a number of
obstacles through the use of via points, which represent underlying muscles and bones.
Typically, these via points are fixed to a bone during movement. For example, consider
the triceps, which wrap around the distal end of the humerus when the elbow is flexed

58
(Figure 0.4). A set of reasonable via points for modeling the force line of this muscle
would be fixed with respect to the humerus, thus keeping the action line out of the end of
the humerus. The only algorithm needed would be to determine which of the via points
are active. None of the via points will be active when the elbow is full extended and all
the via points will be active when the elbow if fully flexed.
Figure 0.4: Triceps action lines with fixed via points about the elbow
While this may work well for muscles that only crosses a joint with only one
degree of rotational freedom, fixed via points become a problem when more complex
wrapping must occur. For example, consider the force line shown in Figure 0.5 which
represents the lower action line of the trapezuis. This line originates in the thoracic
region of the spine, wraps around the thorax and the posterior surface of the scapula. The
movement of the scapula and shoulder affects the shape of this muscle. If one were to use
fixed via points the action line would not be allowed to slide over the medial edge of the
scapula during movement of the shoulder, thus producing an inaccurate approximation of
the muscles centroid line.

59
Figure 0.5: Lower action line of the trapezius with fixed via points on the medial edge of the scapula
This chapter will present a method for real time approximation of how muscles
will wrap around underlying structures by allowing floating via points to dynamically
wrap around prescribed obstacles. The difference between the floating via points and the
fixed via points is that the floating via points are not fixed to a bone but are allowed to
slide across the surface of the obstacle. This approach makes two assumptions about the
action lines. The first is that the action line or lines of a muscle can be modeled as a
frictionless elastic string wrapping around prescribed obstacles. The second is that
spheres and cylinders can represent the underlying anatomical structures that the muscle
must wrap around. The lines being wrapped will then be used to approximate the force
lines generated by the muscles.
Problem Formulation
We propose to develop an algorithm that uses prescribed obstacles to bend the
action line of a muscle in real time such that the action line is a reasonable approximation
of the real muscle’s action line for all possible joint configurations. From anatomy we

60
can determine the origin and insertion of a particular muscle. We can also analyze
underlying muscles and bones so as to determine the size, shape, position and number of
obstacles that the muscle being modeled must wrap around. Therefore, the unknowns are
the positions of the intermediate floating via points. These positions will be dependent on
two factors, if there are one or more obstacles about which wrapping should occur and, if
so, the shape and position of the obstacle or obstacles.
Proposed Solution
An action line will be used to idealize the direction of force generated by a single
muscle. The model attempts to use obstacles to push the line so that it approximates the
centroid line of the muscle, regardless of the orientation of the arm. Some muscles with
wide attachment point or multiple heads such as the bicep use multiple action lines. All
action lines consist of an origin point at one end, an insertion point at the other end and a
number of floating via points in between. Each point is connected to the next with a
straight line (Figure 0.6). An obstacles consists of a simple sphere or cylinder; therefore
wrapping algorithms will need to be developed for each obstacle.
Figure 0.6: Example of wrapping about a sphere

61
Wrapping Algorithm for a Sphere
To present this algorithm we will assume there is only one obstacle, which is a
sphere, and the action line will consist of seven points, which will be referred to as
number 1 through 7, according to their position on the line. Point 1 and 7, which are the
two ends of the line, will always be fixed to the origin and insertion, respectively. Points
2 through 6 are floating via points, which slide across the surface of the sphere when
wrapping.
The first step of the algorithm is to determine if wrapping should occur. Since the
action line is being idealized as a frictionless elastic string, it will always move to the
position where it has the lowest potential energy. As gravity is being ignored, this
translates into the shortest path from the origin to the insertion. Therefore, wrapping will
only occur if the sphere is between the origin and the insertion. This is determined by
casting a ray from the origin to the insertion and testing to see if it intersects with the
sphere. If no intersection is detected, then no wrapping will occur. In this case, the five
intermediate via points are evenly spaced along the line from the origin to the insertion.
If an intersection occurs then the line will need to be wrapped around the sphere.
The line will still be along the shortest path between the origin and insertion while
wrapping around the sphere. For most cases, this path will lie on a plane that contains the
insertion, origin and the center of the sphere. We will refer to this plane as the action line
plane, or AL plane. The exception to this is when the origin, insertion, and center of the
sphere are collinear. In this situation, all paths around the sphere are the same distance so
there is no unique solution. Fortunately this rarely happens and can be avoided by slightly
shifting one of the points.
Once the AL plane has been defined, determining the position of the floating via
points becomes a two dimensional problem. Furthermore, if the sphere’s z axis is aligned
with the normal vector of the plane, then these positions can be determine in the x-y

62
plane of the circle, where the center of the circle is the origin of the circles coordinate
system (Figure 0.7).
Figure 0.7: Wrapping about a sphere in the sphere’s x-y plane which also represents the AL plane
In this algorithm, the first two points determined are the number 2 and 6. These
points are where the line first contacts the sphere (point 2) and stops contacting the
sphere (point 6). We will call these points To (origin side tangent) and Ti (insertion side
tangent). Furthermore we will denote the insertion point as I and the origin as O , both
of which are known with respect to the spheres coordinate system. Since the line is
wrapping over the sphere we know that the line is tangent to the surface of the sphere at
point To and Ti, therefore vector from Ti to I is perpendicular to the vector from C to Ti.
Similarly, vector from To to O is perpendicular to the vector from C to To. From this
observation, we can note that points I, Ti, and C form a right triangle as well as points O,
To, and C. Li and Lo can therefore be calculated from
22
rOLo −= (5.1)
22
rILi −= (5.2)

63
where r is the radius of the sphere. Then αI and αo can be calculated as
⎟⎟⎠
⎞⎜⎜⎝
⎛= −
ii L
r1tanα (5.3)
⎟⎟⎠
⎞⎜⎜⎝
⎛= −
oo L
r1tanα (5.4)
Finally, the position of To and Ti can be calculated by
ipiiiciii VLVLIT )sin()cos( αα −+= (5.5)
opooocooo VLVLOT )sin()cos( αα ++= (5.6)
where Vic, Vip, Voc, and Vop are unit vectors defined as
[ ][ ]1,0,0
1,0,0
ˆ
ˆ
×=
×=
−=
−=
ocop
icip
oc
ic
VV
VVOV
IV
(5.7)
It is important to note that Ti and To are currently defined with respect to the
sphere’s coordinate system. These vectors will eventually need to be transformed into the
world coordinates before the via points are set to these positions.
Now that we have determined the location of points 2 and 6, we need to calculate
the location of points 3, 4 and 5. These will simply be evenly spaced along the arc created
on the surface of the sphere between To and Ti. First, the angle dθ is determined by
4
sin 1
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ ⋅
=
−
oi
oi
TTTT
dθ (5.8)
which the angle between oT and iT divided into four pieces. Then oT is rotated about the
z axis of the sphere by
( ) oj TdjRpv θ*= , for j = 1, 2, 3 (5.9)

64
where jpv is the location of via point j and R is a rotation matrix about the z axis of the
sphere. Again, these points are with respect to the sphere.
The final step for this algorithm is to transform all the points from the sphere
coordinate system to the world coordinate system then set the curve point positions to the
appropriate point. Point 1 has already been set to the origin position, point 2 is set to oT ,
point 3 is set to 1pv , point 4 is set to 2pv , point 5 is set to 3pv , point 6 is set to iT , and
point 7 is set to the insertion position.
Wrapping Algorithm for a Cylinder
To present this algorithm we will again assume there is only one obstacle, which
is a cylinder, and the action line will consist of seven points, which will be referred to as
number 1 through 7, according to their position on the line. Point 1 and 7, which are the
two ends of the line, will always be fixed to the origin and insertion, respectively. Points
2 through 6 are floating via points, which slide across the surface of the cylinder if
wrapping occurs. Testing for wrapping about the cylinder is more complicated than
testing for wrapping about a sphere since a simple ray intersection does not indicates
wrapping. The cylinder does not need to be between the insertion and origin for wrapping
to occur. Therefore, testing for wrapping will have to occur later in the algorithm when
more information known.
Since the action line is being idealized as a frictionless elastic string, it will
always move to the position where it has the lowest potential energy. As gravity is being
ignored, this translates into the shortest path from the origin to the insertion while
wrapping around the cylinder. The shortest path will be a straight line when viewed in the
plane of the string. This plane can be thought of as a piece of paper that is arranged such
that all the points in the line are touching the paper (Figure 0.8).

65
Figure 0.8: Wrapping about a cylinder
This paper would have one end on the origin then wrap around the cylinder in the same
manner as the action line. The far end of the paper would be resting on the insertion. So,
in the geometric coordinate system of the world (x y z) containing the cylinder, it will
look like a plane that has been warped to bend around the cylinder and the action line,
which is contained on that plane, will also be warped to wrap around the cylinder.
However, in the coordinate system of the plane (u v), or if one were to unwrap the plane
so it is flat, this line is not warped but a straight line from the origin to the insertion.
As with the sphere algorithm, this problem will be defined in the coordinate
system of the cylinder where the z vector points along the axis of the cylinder (Figure
0.9). In this algorithm, the first two points determined are the number 2 and 6. These
points are where the line first contacts the cylinder (point 2) and stops contacting the
cylinder (point 6). We will call these points To (origin side tangent) and Ti (insertion side

66
tangent). Furthermore we will denote the insertion point as I and the origin as O , both
of which are known with respect to the cylinder’s coordinate system.
Figure 0.9: Wrapping about a cylinder in the cylinder's x-y plane
We will first calculate the x and y position of To and Ti by only considering the x-
y plane of the cylinder. Since the line is wrapping over the circle we know that the line is
tangent to the circle at point To and Ti, therefore vector from Ti to I is perpendicular to the
vector from C to Ti. Similarly, vector from To to O is perpendicular to the vector from C
to To. From this observation, we can note that points I, Ti, and C form a right triangle as
well as points O, To, and C. Li and Lo can therefore be calculated from

67
22
rOL xyo −= (5.9)
22
rIL xyi −= (5.10)
where xyO and xyI are the 2D vector pointing the origin and insertion while r is the radius
of the cylinder. Then αI and αo can be calculated as
⎟⎟⎠
⎞⎜⎜⎝
⎛= −
ii L
r1tanα (5.11)
⎟⎟⎠
⎞⎜⎜⎝
⎛= −
oo L
r1tanα (5.12)
Now, the position of To and Ti in the x-y plane can be calculated by
ipiiiciixyi VLVLITxy
)sin()cos( αα −+= (5.13)
opooocooxyo VLVLOTxy
)sin()cos( αα −+= (5.14)
where xy denotes that only the x and y components are considered (the z value is set to
zero) and Vic, Vip, Voc, and Vop are unit vectors defined as
[ ][ ]1,0,0
1,0,0
ˆ
ˆ
×=
×=
−=
−=
ocop
icip
xyoc
xyic
VV
VV
OV
IV
(5.15)
The angle between xyiT and
xyoT about the z-axis of the cylinder is calculated as
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛ ⋅= −
xyxy
xyxy
oi
oiz
TT
TT1sinθ (5.16)
At this point we have enough information to determine if wrapping should occur.
To determine this we will check to see if the z component of the cross product between
xyiT and xyoT is either positive or negative, depending on how the line should wrap (Figure
0.10).

68
Figure 0.10: Difference between wrapping if negative or a positive cross product is allowed
Next, we need to calculate the z coordinate of the points. This is accomplished by
considering the straight line as seen in the plane of the line, which is in u-v coordinates
(Figure 0.11). It can be observed that v axis of this plane aligns with the z axis of the
cylinder.
Figure 0.11: Wrapped line viewed in u-v coordinates
First, the slope of the line is calculated from
izo LrL
hs++
=θ
(5.17)

69
where h is the distance between the insertion and origin along the z axis of the cylinder.
From the slope ho, hi, and dh can be calculated as
4z
ii
oo
srdh
sLhsLh
θ=
==
(5.18)
Finally, the position of To and Ti can be calculated by
ziipiiiciii ChVLVLIT ˆ)sin()cos( −−+= αα (5.19)
zoopooocooo ChVLVLOT ˆ)sin()cos( +++= αα (5.20)
where zC is the cylinders z unit vector.
At this point we can check to see if both points are within the length of the
cylinder. For example, in the x-y plane of the cylinder, it may appear that wrapping
should occur. However, now that the point’s positions have been calculated in the z
direction the points may be past the ends of the cylinder. This test is accomplished by
simply looking at the z component of the positions to make sure they are positive and less
than the length of the cylinder. To simplify this algorithm we wrap the line even if only
one of the points is within the length of the cylinder. In many cases, this test can be
skipped and the cylinder just assumed to be infinitely long.
Now that we have determined the location of points 2 and 6, we need to calculate
the location of points 3, 4 and 5. These will simply be evenly spaced along the arc created
on the surface of the cylinder between To and Ti. First, the angle dθz is determined by
4
zzd θθ = (5.21)
which the angle between oT and iT about z the divided into four pieces. Then oT is
translated and rotated about the z axis of the cylinder by
( ) zozj CdhjTdjRpv )*(* += θ , for j = 1, 2, 3 (5.22)

70
where jpv is the location of via point j and R is a rotation matrix about the z axis of the
cylinder.
The final step for this algorithm is to transform all the points from the cylinder
coordinate system to the world coordinate system then set the curve point positions to the
appropriate point. Point 1 has already been set to the origin position, point 2 is set to oT ,
point 3 is set to 1pv , point 4 is set to 2pv , point 5 is set to 3pv , point 6 is set to iT , and
point 7 is set to the insertion position.
Multiple Obstacle Wrapping
Many of the action lines in the body will need to wrap around multiple obstacles
to be able to closely approximate the appropriate path. In the previous two formulations it
was assumed that only one obstacle was encountered. This is handled by simply running
each algorithm in series in the order they are encountered and offsetting which curve
points they affect. Before any of the wrapping algorithms are run, point 1 of the curve is
set to the origin and the last point on the curve is set to the insertion position. The only
thing added to the above algorithms is an integer offset that the algorithm uses to
determine which portion of the curve it works on and the insertion/origin of that portion.
As an example, we will consider a line that starts at the origin before wrapping over a
cylinder and then wraps around a sphere before terminating at the insertion point (Figure
0.12). This curve will have 12 points, one point for the origin, one point for the insertion,
five points wrapping around the cylinder and five points wrapping around the sphere.
These points will be referred to as cpn where n is the number indicating their order. The
first step is to set the position of cp1 to the origin and the position of cp12 to the insertion.
As far as the wrapping algorithms are concerned the curve only has seven points with the
first point being the origin and the seventh point being the insertion.

71
Figure 0.12: Example of wrapping around two objects
Therefore, the algorithm will consider the origin to be the position of cp1+offset and the
insertion to be the position of cp7+offset. At the end of the algorithm it will set the position
of cp2+offset to oT , set the position of cp3+offset to 1pv , set the position of cp4+offset to 2pv , set
the position of cp5+offset to 3pv and set the position of cp6+offset to iT . Since the cylinder is
the first obstacle encountered when moving away from the origin, it’s algorithm will be
run first with the offset value set to zero. So, it will see cp1 as the origin and cp7 as the
insertion and then will set the position of cp2 through cp6 based on the algorithm. Next it
will run the algorithm for the sphere with the offset set to 5. The sphere-wrapping
algorithm will see cp6 as the origin and cp12 as the insertion and set the position of cp7
though cp11 based on the algorithm. It is important to note the interrelationship between
the two obstacles. The first obstacle will always consider cp7, which is the To point in the
second algorithm, to be the insertion point when calculating the wrapping positions for
cp2 through cp6. Then the second obstacle will always consider cp6, which is the Ti point
in the first algorithm, to be the origin when calculating the positions for cp7 through cp11.
Therefore, the solution for multiple obstacles must be found iteratively.

72
Examples
In this section several examples of the wrapping algorithms will be presented. The
above algorithms were programmed in a real-time rendering environment using a
language similar to C.
Spherical Wrapping
The simulation for this example is comprised of a curve called curveToWrap with
7 control points, a sphere called SphereMediumRes with a radius of 10, and two 3D
frames called insertion and origin, which represent the origin and insertion positions. The
logic of the simulation is shown in Figure 0.13 where the block Attach Curve Ends holds
the code that places the ends of the curve at the origin and insertion positions and the
block Spherical Wrap holds the code which performs the spherical wrapping algorithm
described in the previous section.
Figure 0.13: Logic for spherical wrapping example
It is important to note that these blocks are arranged in a loop such that for every
render frame first the Attach Curve Ends is executed and then the Spherical Wrap is
executed. The Attach Curve Ends block takes three inputs, the curve it should use, the 3D
frame representing the position of the origin, and the 3D frame representing the position
of the insertion. When executed, this script simply gets the position of the insertion and
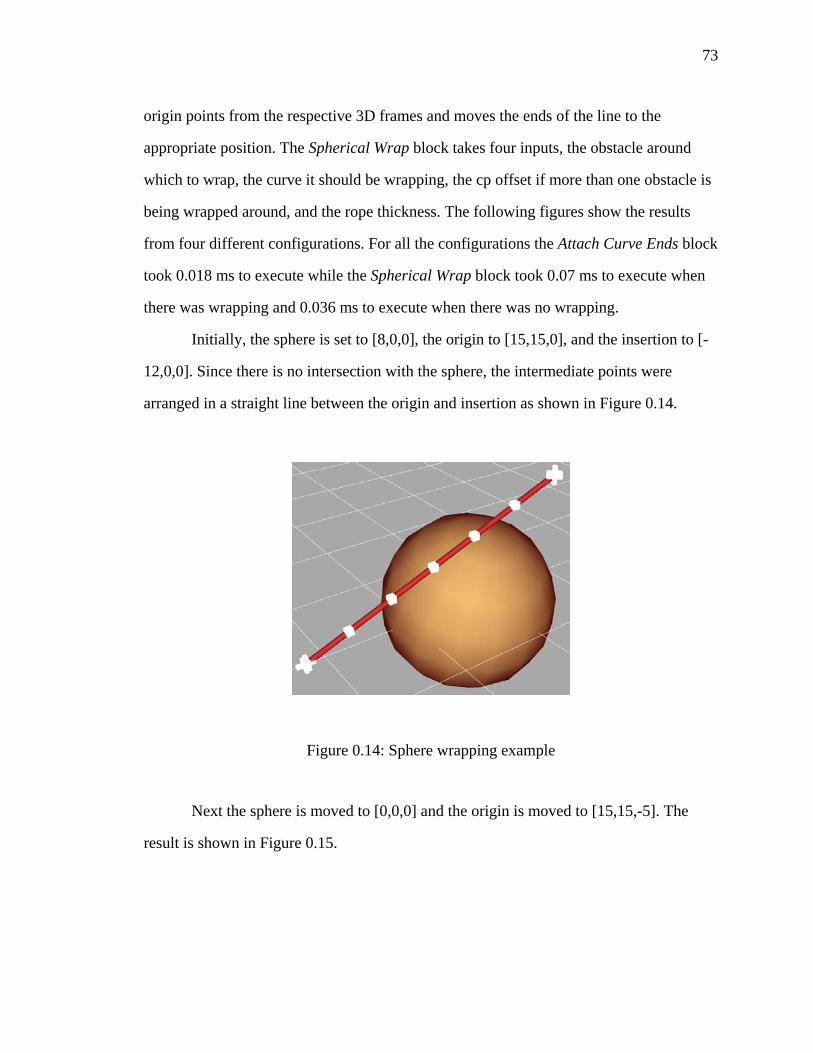
73
origin points from the respective 3D frames and moves the ends of the line to the
appropriate position. The Spherical Wrap block takes four inputs, the obstacle around
which to wrap, the curve it should be wrapping, the cp offset if more than one obstacle is
being wrapped around, and the rope thickness. The following figures show the results
from four different configurations. For all the configurations the Attach Curve Ends block
took 0.018 ms to execute while the Spherical Wrap block took 0.07 ms to execute when
there was wrapping and 0.036 ms to execute when there was no wrapping.
Initially, the sphere is set to [8,0,0], the origin to [15,15,0], and the insertion to [-
12,0,0]. Since there is no intersection with the sphere, the intermediate points were
arranged in a straight line between the origin and insertion as shown in Figure 0.14.
Figure 0.14: Sphere wrapping example
Next the sphere is moved to [0,0,0] and the origin is moved to [15,15,-5]. The
result is shown in Figure 0.15.

74
Figure 0.15: Sphere wrapping example
Then the origin is moved to [15,0,0] and the insertion is moved to[-12, 0.5, 0],
resulting in Figure 0.16.
Figure 0.16: Sphere wrapping example
Finally, the insertion is pushed to [-12, 0.5, -0.75], which result in Figure 0.17

75
Figure 0.17: Sphere wrapping example
Cylindrical Wrapping
The simulation for this example is comprised of a curve called curveToWrap with
7 control points, a cylinder called BlueCyl with a radius of 10 and a length of 25, and two
3D frames called insertion and origin, which represent the origin and insertion positions.
The logic of the simulation is shown in Figure 0.18, where the block Attach Curve Ends
holds the code that places the ends of the curve at the origin and insertion positions and
the block Cylinder Wrap holds the code which performs the cylindrical wrapping
algorithm described in the previous section.
Figure 0.18: Logic for cylinder wrapping example
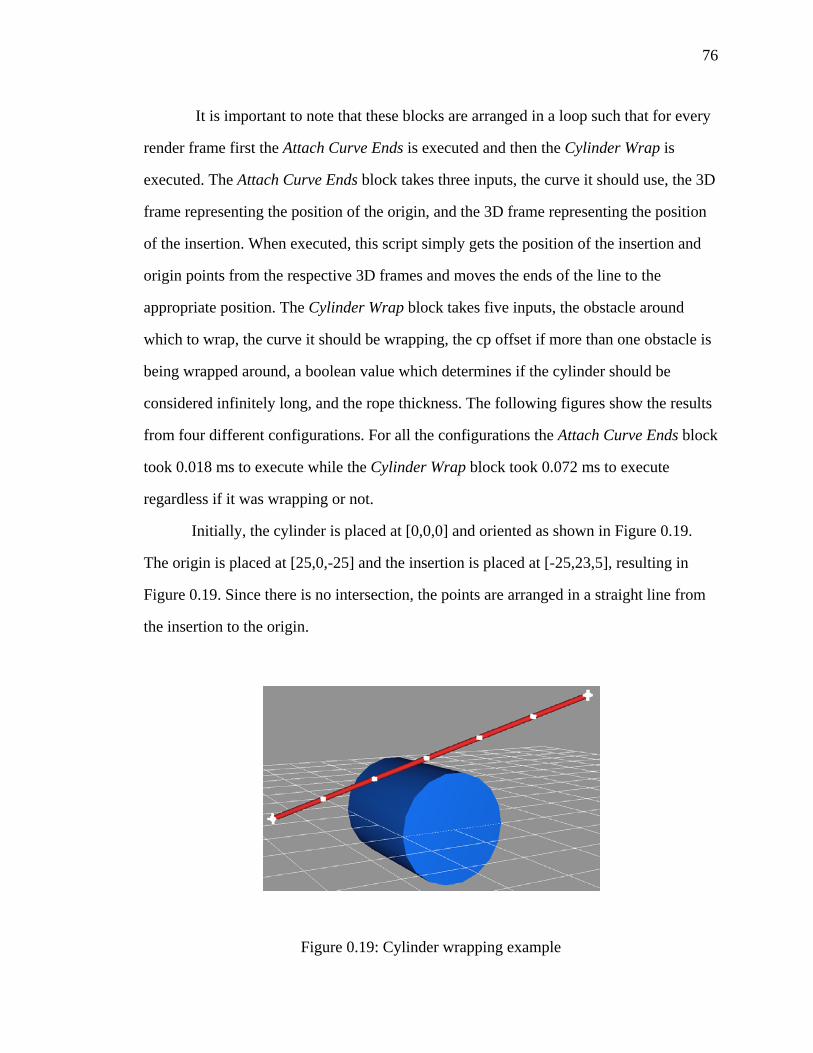
76
It is important to note that these blocks are arranged in a loop such that for every
render frame first the Attach Curve Ends is executed and then the Cylinder Wrap is
executed. The Attach Curve Ends block takes three inputs, the curve it should use, the 3D
frame representing the position of the origin, and the 3D frame representing the position
of the insertion. When executed, this script simply gets the position of the insertion and
origin points from the respective 3D frames and moves the ends of the line to the
appropriate position. The Cylinder Wrap block takes five inputs, the obstacle around
which to wrap, the curve it should be wrapping, the cp offset if more than one obstacle is
being wrapped around, a boolean value which determines if the cylinder should be
considered infinitely long, and the rope thickness. The following figures show the results
from four different configurations. For all the configurations the Attach Curve Ends block
took 0.018 ms to execute while the Cylinder Wrap block took 0.072 ms to execute
regardless if it was wrapping or not.
Initially, the cylinder is placed at [0,0,0] and oriented as shown in Figure 0.19.
The origin is placed at [25,0,-25] and the insertion is placed at [-25,23,5], resulting in
Figure 0.19. Since there is no intersection, the points are arranged in a straight line from
the insertion to the origin.
Figure 0.19: Cylinder wrapping example

77
Next, the insertion was moved to down to [-25,0,5], as shown in Figure 0.20.
Figure 0.20: Cylinder wrapping example
Then, the cylinder is moved up to [0,30,0], resulting in Figure 0.21.
Figure 0.21: Cylinder wrapping example
Finally, the cylinder is twisted about its z axis as shown in Figure 0.22.

78
Figure 0.22: Cylinder wrapping example
Multiple Obstacle Wrapping
The simulation for this example is comprised of a curve called curveToWrap with
17 control points, a cylinder called BlueCyl with a radius of 5 and a length of 25, another
cylinder called GreenCyl with a radius of 8 and a length of 18, a sphere called RedSphere
with a radius of 8, and two 3D frames called insertion and origin, which represent the
origin and insertion positions (Figure 0.23).
Figure 0.23: Setup for multiple obstacle wrapping example

79
The logic of the simulation is shown in Figure 0.24, where the block Attach Curve
Ends holds the code that places the ends of the curve at the origin and insertion positions,
the blocks Cylinder Wrap holds the code that performs the cylindrical wrapping
algorithm described in the previous section, and the block Spherical Wrap holds the code
which performs the spherical wrapping algorithm described in the previous section. It is
important to note that these blocks are arranged in a loop such that for every render frame
first the Attach Curve Ends is executed and then the first Cylinder Wrap is executed,
followed by the Spherical Wrap, and finally the second Cylinder Wrap.
Figure 0.24: Logic for multiple obstacle wrapping
The Attach Curve Ends block takes three inputs, the curve it should use, the 3D
frame representing the position of the origin, and the 3D frame representing the position
of the insertion. When executed, this script simply gets the position of the insertion and
origin points from the respective 3D frames and moves the ends of the line to the
appropriate position. The Cylinder Wrap block takes five inputs, the obstacle around
which to wrap, the curve it should be wrapping, the cp offset if more than one obstacle is
being wrapped around, a boolean value which determines if the cylinder should be
considered infinitely long, and the rope thickness. Note that the first block has a cp offset
of 0, the second block has a cp offset of 5 and the last block has a cp offset of 10. It is
important that the cp offset and the order in which the obstacles are encountered (from
the origin) correlate. For example, since the blue cylinder is encountered first its cp offset

80
should be zero. Figure 0.25 and Figure 0.26 show the results of one configuration. Total
execution time for all four blocks was 0.225 ms with the last Cylinder Wrap taking the
most time at 0.098 ms.
Figure 0.25: Multiple object wrapping example
Figure 0.26: Multiple object wrapping example
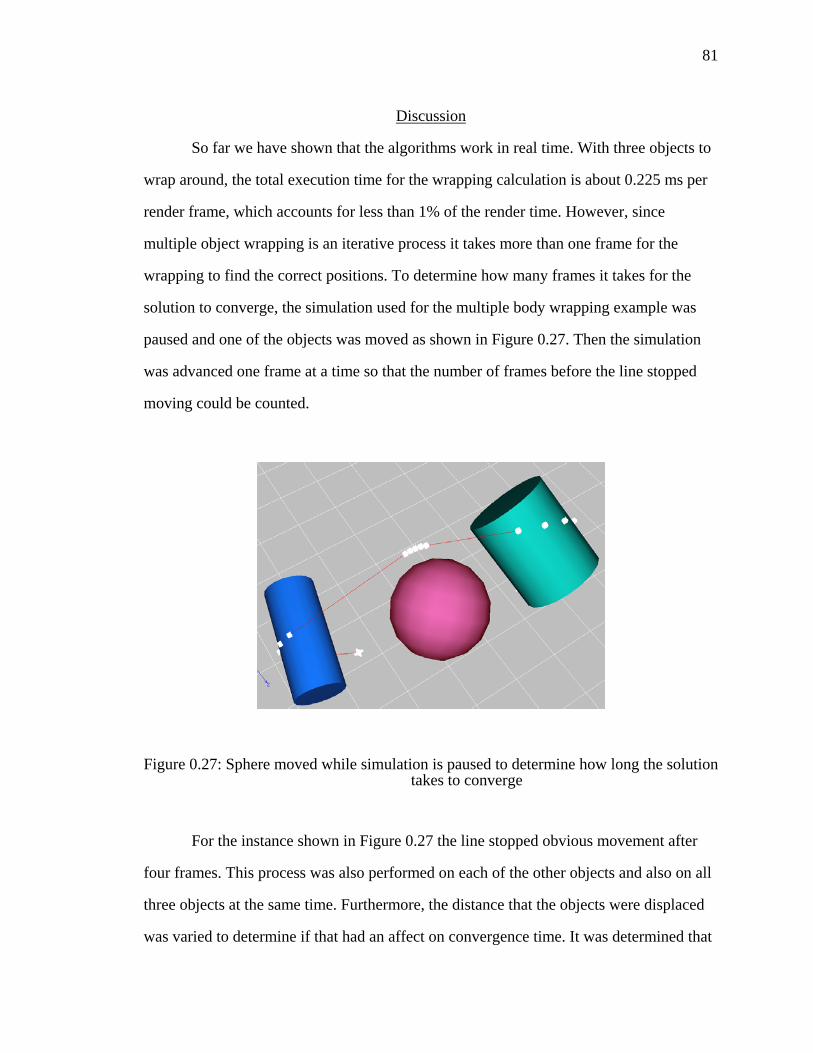
81
Discussion
So far we have shown that the algorithms work in real time. With three objects to
wrap around, the total execution time for the wrapping calculation is about 0.225 ms per
render frame, which accounts for less than 1% of the render time. However, since
multiple object wrapping is an iterative process it takes more than one frame for the
wrapping to find the correct positions. To determine how many frames it takes for the
solution to converge, the simulation used for the multiple body wrapping example was
paused and one of the objects was moved as shown in Figure 0.27. Then the simulation
was advanced one frame at a time so that the number of frames before the line stopped
moving could be counted.
Figure 0.27: Sphere moved while simulation is paused to determine how long the solution takes to converge
For the instance shown in Figure 0.27 the line stopped obvious movement after
four frames. This process was also performed on each of the other objects and also on all
three objects at the same time. Furthermore, the distance that the objects were displaced
was varied to determine if that had an affect on convergence time. It was determined that
82
distance does not significantly change the time to convergence but the number of objects
moved does. The longest convergence time encountered was when all three objects were
moved at the same time. 8 frames were counted before the line stopped obvious
movement. If the simulation is running real time (~30 fps) this translates into about 0.25
seconds. It should also be noted that in all cases, the first frame displayed the most drastic
change in positions.
During testing of the wrapping algorithms, a situation was discovered that caused
the wrapping to fail. This occurred when either an obstacle or one of the end points is
moved such that either the origin or the insertion moves within an obstacle. Since it is
impossible for any line originating from within a sphere or cylinder to be tangent to the
surface, the wrapping algorithm fails. This can be avoided by careful placement of the
obstacles.
Conclusions
It has been shown that a real time algorithm for wrapping about multiple known
objects is feasible. This chapter presented algorithms for wrapping around a sphere and a
cylinder and also detailed how to arrange these algorithms so that multiple objects could
be used. These algorithms will be useful for estimating a muscles centroid line or
multiple action lines (for muscles with wide attachment points) for any joint
configuration and in real time.

83
REAL TIME INTERACTION
Introduction
One way that our model is different from other models is that it is specifically
being designed to run real time. This implies that the model must respond to user input
instantly. For example, the user must have the ability to rotate the shoulder to arbitrary
orientation. During this movement, the action line for all the muscles should appear to
move as if they are really attached to the bones and wrapping over underlying objects.
Furthermore, the activation level of all the muscle should be constantly changing to
maintain the desired torques as the orientation changes. In this chapter we will discuss the
software in which the model was developed, the process used for enabling real time
interaction, and the graphical interface that will be used to relay information to the user.
Software
The group that is leading the way in real time interactivity is the video gaming
industry. In reality, the model we are developing will have interactivity like a video game
but also a scientific core dictating the output. Therefore an obvious place to look for
interactive 3D software is towards video game rendering engines and development
software. This software must have the following capabilities:
• Ability to import available 3D geometric models of the musculoskeletal
system
• Ability to render the objects in real time such that the objects can be
rotated and moved
• Ability to create a hierarchal structure of the bones and the attachment
points of the muscles
• Ability to create joints between the bone and limit the degrees of freedom
and range of these joints
• Ability to allow the user to interactively articulate the joints

84
• Ability to create lines representing the action lines of muscles which can
be changed as the arm is moved
• Enough programming structure to develop and deploy the wrapping
algorithms presented in chapter 5
• Ability to communicate with other software, which will handle the
optimization and the user interaction
After careful consideration Virtools™ was selected as the development software.
Not only did this fulfill the above requirements, it is also the software that the Virtual
Soldier Research lab is using to develop Santos™, which is where this model will
eventually be used. Virtools™ is a development tool that was initially created as
prototyping software for game developers. It allows simple graphical programming to
quickly develop interactive real time simulations. Furthermore, it also allows in depth
programming through either a SDK or a scripting language to develop more complicated
simulations.
The software selected for creating the simulation is very good for quickly creating
interactive real time simulation. However, it is somewhat onerous when it comes to
developing 2D user interfaces such as graphs, buttons, and information panels. Because
of this it was decided to create the interface window outside of Virtools™ in Microsoft
Visual Basic 6.0®, which is especially suited for creating graphic user interfaces. This
interface will display feedback graphs of various muscle data, allowing the user to change
the PSCA of the muscles and joint torques.
The last piece of software employed is a specialized program designed
specifically for solving optimization problems. This software will be used to solve the
optimization problem described in chapter 6. The program selected is called SNOPT and
is commercially available. SNOPT is used to minimize linear or nonlinear cost functions
with many variables and constraints. To find the minimum it uses a sequential quadratic

85
programming algorithm that obtains a search direction from a series of quadratic
programming sub problems. This results in a quick calculation of a local minimum.
Figure 0.1: Interaction between programs
These three programs will work together as shown in Figure 0.1 above. The user
will interact with both Virtools™ and Visual Basic®. Virtools™ will take care of
displaying the 3D model while communicating the moment arms of all the muscles to
Visual Basic®, which passes them on to SNOPT along with the desired torques and Fmax
for each muscle. SNOPT will return the predicted activation level of each muscle to
Visual Basic® which will take care of graphing all the appropriate data. Note that the
data being passed to SNOPT is based on the optimization formulation presented in

86
chapter 6. Other variables may be passed if different cost functions are used to predict the
muscle activation or force.
Creating User Interaction
The user will have the ability to interact with our model in three ways. The first is
the ability to navigate around, the second is the ability to arbitrarily move any of the
joints and the third will be the ability to change the torque at the joints.
Creating the interface for navigation is fairly straightforward, as this has been
developed for nearly every video game. Generally there are two types of navigation. One
is the first person movement where the user typically moves the camera around as if they
were walking around a room. The other is sometimes called the “environment in hand”
model (Wickens and Baker, 1995), where the virtual object is moved instead of the
camera as if the user were holding it in their hands. While the first person movement is
useful for maneuvering through mazes and worlds, the environment in hand is preferred
for inspecting objects, therefore this model was applied to our simulation. It was
programmed such that holding down the Alt key triggered the camera movement, which
was achieved with by clicking the mouse buttons while dragging the mouse. The left
button is used to rotate the object, right button zooms, and the middle button panned the
scene. Also, the Shift button allows the user to re-center the object and select a center of
rotation for the object by holding down the Shift key and clicking on the object.
Manipulating each joint interactively was also achieved through the use of the
keyboard and the mouse. The simulation was designed so that holding down a key would
trigger interaction with specific joint. The keys selected were q for the SC joint, w for the
GH joint, e for the UH joint and r for the UR joint. While one of these keys were held
down, the user could manipulate the joint by holding down one of the mouse buttons and
dragging up and down. The left button rotated about the z-axis, the middle button rotated
about the y-axis and the right button rotated about the x-axis. It should be noted that the

87
joint with only 1DOF could only be manipulated with the left mouse button. It should
also be noted that there is no interaction programmed for the AC joint. This is because
the AC joint moves in rhythm with the GH and the SC joints.
The interaction for changing the torques were incorporated into the Visual Basic
interface as sliders (Figure 0.2). Through this interface the user has the ability to specify
the torque about the x, y, and z axis for all five joints.
Figure 0.2: Joint torque user interface. For the joints with more than 1DOF the sliders are arranged such that the top slider is torque about x, middle slider is torque
about y and the bottom slider is torque about z.
Data Feedback
This model incorporates 35 action lines, each of which affects at least one joint
with at least one degree of freedom. Some muscles, such as the pectorals major originate
on the torso and insert on the humerus. Because of this, it affects three spherical joints
(the GH, AC, and SC). What this boils down to is that this model will generate a whole
lot of data that needs to be conveyed to the user in a logical manner. It was decided to
display three main pieces of data. First will be the moment arms that each muscle creates

88
about the joint or joints that it crosses for any limb configuration. Second will be the max
torque that each muscle can apply to each joint or joints that it crosses for any limb
configuration. Lastly it will display the predicted activation level of all the muscles for a
given set of joint torques and arm configuration. All this data will be displayed as bar
graphs in a qualitative manner.
Moment Arm Display
The moment arms are calculated within Virtools™ and passed to Visual Basic.
They have to be calculated in Virtools™ because they are derived from the geometry and
the action lines of each muscle. The moment arms were calculated with the following
equation where r is the vector pointing from the joint to where the action line inserts and
F is the unit vector pointing along the action line at the point of insertion.
Frma ˆ×= (6.1)
Figure 0.3: Moment Arms of muscles crossing the sterno-clavicular joint
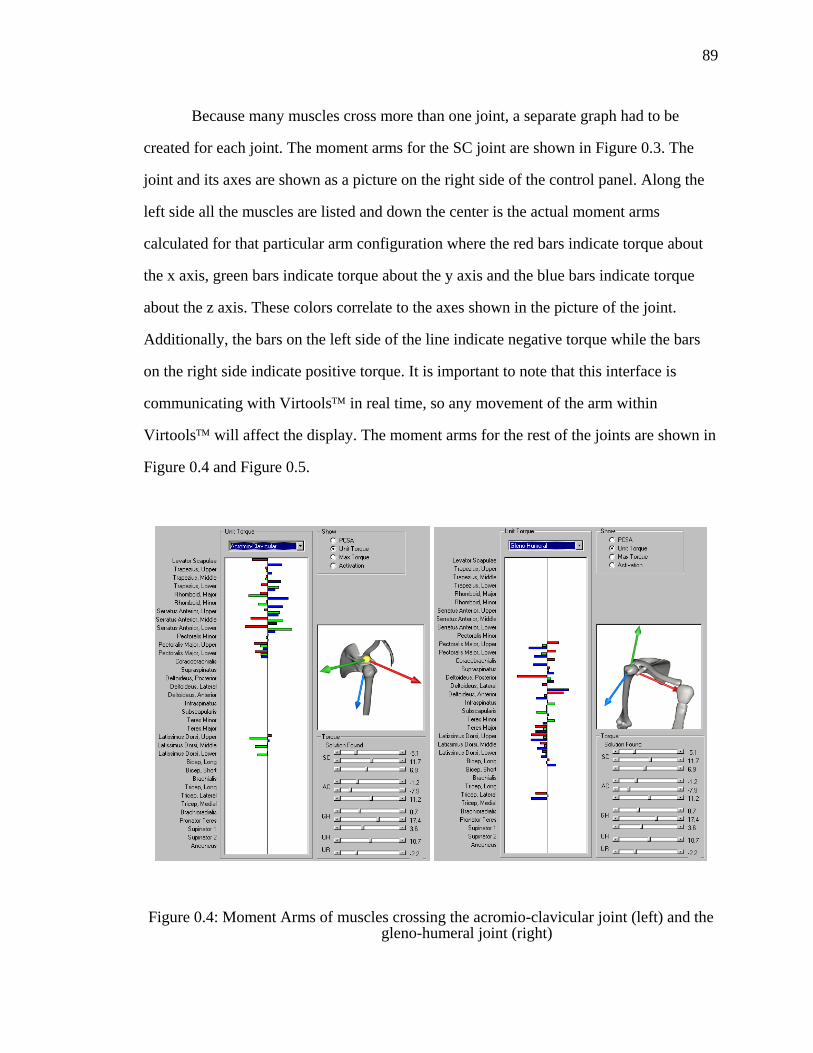
89
Because many muscles cross more than one joint, a separate graph had to be
created for each joint. The moment arms for the SC joint are shown in Figure 0.3. The
joint and its axes are shown as a picture on the right side of the control panel. Along the
left side all the muscles are listed and down the center is the actual moment arms
calculated for that particular arm configuration where the red bars indicate torque about
the x axis, green bars indicate torque about the y axis and the blue bars indicate torque
about the z axis. These colors correlate to the axes shown in the picture of the joint.
Additionally, the bars on the left side of the line indicate negative torque while the bars
on the right side indicate positive torque. It is important to note that this interface is
communicating with Virtools™ in real time, so any movement of the arm within
Virtools™ will affect the display. The moment arms for the rest of the joints are shown in
Figure 0.4 and Figure 0.5.
Figure 0.4: Moment Arms of muscles crossing the acromio-clavicular joint (left) and the gleno-humeral joint (right)

90
Figure 0.5: Moment arms of muscles crossing the ulno-humeral joint (left) and the ulno-radial joint (right)
Max Torque Display
Max torque contributed by each muscle is calculated with the equation 6.2 where
ma is the moment arm calculated with equation 6.1 and Fmax is the maximum force that
the muscle can generate, which can be calculated by the physical cross sectional area
(PCSA) and the maximum muscle stress, as shown in equation 6.3. The PCSA for each
muscle was found in literature (Maurel and Thalmann, 1999) and 600 kPa was used for
the maximum muscle stress (Berme et al., 1987). As with the moment arm data, this is
displayed as qualitative bar graphs for each joint. The resulting display is shown in
Figure 0.6, Figure 0.7, and Figure 0.8.
( ) maFFrFFrT maxmaxmaxmaxˆ =×=×= (6.2)
maxmax *σPCSAF = (6.3)

91
Figure 0.6: Max torque of muscles crossing the sterno-clavicular joint
Figure 0.7: Max torque of muscles crossing the acromio-clavicular joint (left) and the gleno-humeral joint (right)
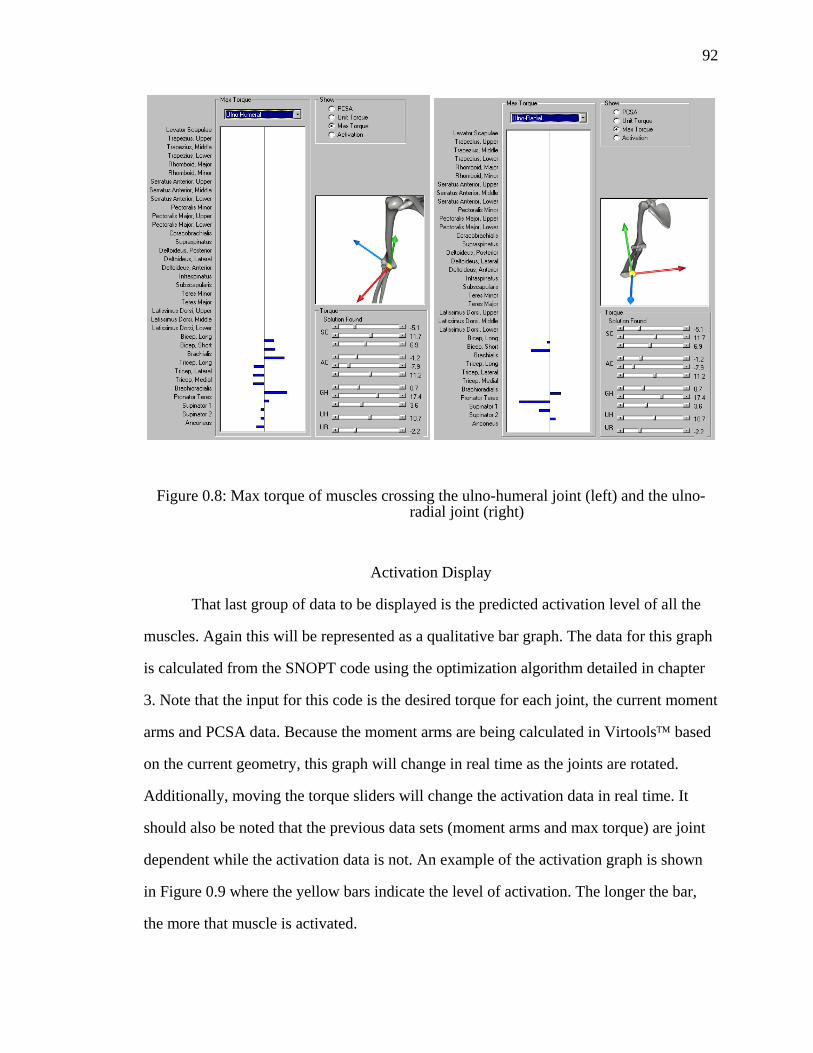
92
Figure 0.8: Max torque of muscles crossing the ulno-humeral joint (left) and the ulno-radial joint (right)
Activation Display
That last group of data to be displayed is the predicted activation level of all the
muscles. Again this will be represented as a qualitative bar graph. The data for this graph
is calculated from the SNOPT code using the optimization algorithm detailed in chapter
3. Note that the input for this code is the desired torque for each joint, the current moment
arms and PCSA data. Because the moment arms are being calculated in Virtools™ based
on the current geometry, this graph will change in real time as the joints are rotated.
Additionally, moving the torque sliders will change the activation data in real time. It
should also be noted that the previous data sets (moment arms and max torque) are joint
dependent while the activation data is not. An example of the activation graph is shown
in Figure 0.9 where the yellow bars indicate the level of activation. The longer the bar,
the more that muscle is activated.

93
Figure 0.9: Predicted activation levels
Conclusion
In this chapter we have presented the software used for development and the real
time interfaces for both user input and data feedback. We have presented all the pieces of
the research used to create our interactive arm model. In the next chapter we will present
various examples and discuss the results.

94
RESULTS AND DISCUSSION
Introduction
In this chapter we will start out by examining the lower arm, which includes the
elbow (UH), the hand pronation joint (UR) and the associated muscles crossing them.
Then we will examine the pectoral girdle, which includes the three shoulder joints (SC,
AC, and GH) and the associated muscles. Finally we will present the system as a whole.
For each region we will examine the computed moment arms, max torque, and predicted
activation levels for the associated muscles and discuss the data. In all the examples, the
moment arms were calculated from equation 6.1 in chapter 6, max torque was calculated
from equation 6.2 in chapter 6 and the predicted activation levels were calculation from
the optimization algorithm presented in chapter 3. The PCSA data and max muscle stress
values used are shown in Figure 0.1 (Maurel, 1999). For these examples, these values
were held constant. At the end of the chapter we will present some preliminary
comparisons of our model to previous models.
Figure 0.1: Max muscle stress (kPa) and PCSA (cm2) data used in the examples
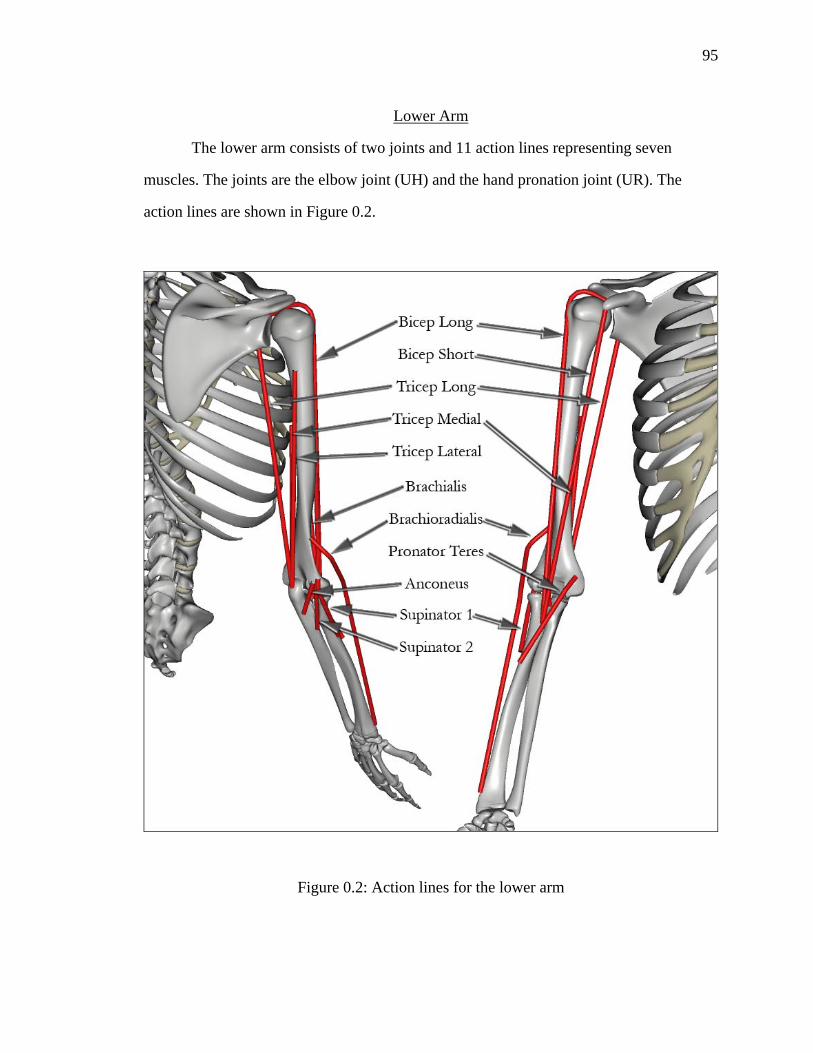
95
Lower Arm
The lower arm consists of two joints and 11 action lines representing seven
muscles. The joints are the elbow joint (UH) and the hand pronation joint (UR). The
action lines are shown in Figure 0.2.
Figure 0.2: Action lines for the lower arm

96
First we examine how the action line wrapping algorithm presented in chapter 5 is
working. Figure 0.3 shows the lower arm in three configurations. Note how the six action
lines wrap over the distal end of the humerus and the Supinator 1 action line wraps about
the radius as the hand is pronated. It is important to emphasize that this wrapping is
occurring in real time as the joints are interactively being rotated.
Figure 0.3: Action lines wrapping around the elbow. From left to right: elbow fully extended with hand supinated, elbow halfway flexed with hand supinated,
elbow fully flexed with hand pronated
Next we will move position the lower arm in various positions and look at the
moment arms, max torque and predicted activation levels for the muscles. Figure 0.4
displays the first configuration and resulting moment arms and max torque. In this
configuration the elbow if fully extended and the hand is neutral, which we define as
halfway between pronation and supination. The graphs in the figure display the moment
arms and max torque about each joint for each muscle. By observing the graphs for the
elbow joint (UH) one will note that all the action lines shown create torque about the UH
joint while only five create a moment about the UR joint. This is appropriate because
while all the action lines cross the elbow joint (i.e. they originate on a bone which is
proximal to the elbow and insert on a bone which is distal to the elbow) not all the

97
muscles cross the UR joint. Specifically, the muscles which insert on the radius cross
both the UR and UH joint while the muscles that insert on the ulna only cross the UH
joint.
Figure 0.4: Example 1; Hand is neutral and the elbow if fully extended. The charts show the moment arms and max torque about each joint for all 11 action lines of the
lower arm

98
By looking at the sign of the moment arm we can also determine what action that
muscle will have on the respective joint. All the action lines with positive moment arms
on the UH joint are used for flexion while the action lines with negative moment arms are
used for extension. As expected, the triceps, supinator, and anconeus are all used for
extension while the biceps, brachialis, brachioradialis, and pronator teres are used for
flexion. The three triceps action lines have the largest moment arm for extending the arm
while the brachioradialis has the largest moment arm for flexion. However, the maximum
torque that these muscles can apply is also dependent on the size of the muscle. The main
extension muscles are still the triceps but there are two major flexion muscles, the
brachioradialis and the brachialis. Even though the brachialis has a short moment arm, its
size lets it create almost as much torque as the brachioradialis.
At the UR joint, a positive moment arm indicates the muscle is used for
supination of the hand while a negative moment arm is used for pronation. Therefore it
can be observed that all the muscles crossing this joint are used for supination except for
the pronator teres and the muscle that can contribute the most torque towards supination
is the brachioradialis. It should be noted that these graphs should only be used for
qualitative comparison to the other action lines in the same graph. The size of the bars
displaying torque about the UR joint cannot be compared to the size of the bars
displaying torque about the UH joint.
Figure 0.5: Predicted muscle activation for various torques

99
Next we will look at the predicted activation levels of all the muscles to achieve a
desired torque as shown in Figure 0.5. Note that the arm is still in the configuration as
shown in Figure 0.4. Initially, the slider for the elbow torque was increased until no
feasible solution was found by the optimization code, then the slider was stepped back so
a solution was found at the very edge of the feasible space. This resulted in a flexion
torque about the elbow of 8 Nm as shown in the first graph of Figure 0.5. It is interesting
to note that while the optimization code is telling us this the max torque we can generate
about the elbow, only three muscles are active; the brachialis, brachioradialis, and
pronator teres. This is because we have constrained the torque about the UR joint to be
zero. The brachialis, which creates no torque about the UR, (refer to Figure 0.4) is fully
activated because it is the only muscle that creates a positive torque about UH without
affecting UR. The brachioradialis is also slightly activated to help create torque about the
elbow but it also creates positive torque about the UR joint since it inserts on the radius.
In order to maintain zero torque about the UR joint, the pronator teres, which is the only
muscle that is available to create negative torque about the UR, is activated to counter
positive torque created by the brachioradialis. The step size on the slider used to select
how much torque is desired about the elbow is 0.1 Nm. Allowing a finer step size on the
elbow torque slider may reveal that a little more torque could be generated because the
pronator teres is not fully activated, thus the brachioradialis could be activated a little
more. Finally, it can also be observed that the two flexion muscles with the largest
moment arms were the muscles that were activated to generate the positive torque.
In the second graph of Figure 0.5, the torque about the UR joint is moved up to 2
Nm while the torque about UH is left at 8 Nm. Note that the brachioradialis is now fully
activated, the brachialis’ activation has been significantly reduced, and the pronator teres
is no longer activated. Furthermore, both the biceps and a supinator muscle are now
activated. The brachioradialis is fully activated because it has the ability to create the
largest positive torque about both the joints, thus contributing to both of the desired
100
torques. Both of the biceps also contribute positive torques to both joints, but are less
effective than the brachioradialis so they are not as active. The supinator 1 muscle has
likely been activated to contribute to the torque about the UR joint because of the
available torque it can generate. However, this also creates a negative torque about the
UH joint, albeit small compared to the other muscles. The brachialis is also active to help
with the UH torque. Note that this muscle does not contribute to the UR torque.
Observation of the second graph of Figure 0.5 shows that only one muscle is fully
activated, this indicating that more torque can be generated. Therefore both of the torques
are increased until both are at the edge of the feasible region. The result is a torque of
16Nm about the elbow and 2.5 Nm about the UR, as shown in the third graph of Figure
0.5. It can be observed that all the flexion muscles about the elbow are nearly completely
activated indicating that not much more positive torque can be generated about the elbow.
Similarly, all the muscles available for positive torque about the UR are activated but the
supinator 1 muscle is not fully activated. This either indicates that we are not quite at the
edge of our feasible space or that the flexion muscles cannot counter any more negative
torque about the elbow from this muscle.
So far, none of the triceps have been activated because no negative torque has
been needed about the UH joint. Therefore, the desired UR torque was held constant
while the UH torque was reduced until we reached the approximate edge of the feasible
space. The result was –4.1 Nm and the activation levels can be seen in the fourth graph of
Figure 0.5. From this graph it can be observed that all the extension muscles are fully
activated except for the supinator 2. The brachialis and the pronator teres are both not
active at all while the brachioradialis and the biceps are active, which are being used to
generate the positive torque about UR. However, these muscles are also creating positive
torque about UH, which the extensor muscles must counter. Therefore, if the UR torque
was reduced the biceps and brachioradialis would be able to relax, thus easing the amount
of torque the triceps need to create. This is shown in the last graph of Figure 0.5 where

101
the desired UR torque is set to zero. From the graph it can be observed that none of the
extensor muscles are fully activated, implying that more negative torque can easily be
generated at the elbow. It can also be noted that the only extensor muscle that is not
activated at all is the supinator 1 muscle, which is the only extensor muscle that also
creates torque about the UR joint.
Figure 0.6: Example 2; Hand is neutral and the elbow if fully flexed. The charts show the max torque about each joint for all 11 action lines of the lower arm

102
In the second example the hand is left neutral while the
elbow is fully flexed to 120° as shown in Figure 0.6. This
time only the max torque is displayed for each muscle.
When compared to the max torques of Figure 0.4 one will
observe that a number of muscles used for flexion and
extension is the same. Similarly, the number of pronating
and supinating muscles about the UR joint are also the
same. When considering the amount of available torque
about the UR joint, it should be noted that the amount of
available negative torque is less while the amount of
available positive torque is considerably greater. The max
torque of the brachialis is about the same but the max
torque of the brachioradialis has nearly doubles while the
max torque of both biceps have nearly tripled. All the max
torques of the extensor muscles have shrunk somewhat
indicating that the arm has less capability for creating
negative torque in this position. There is not much change
noted in the max torques of the muscles crossing the UR
joint. Since the PCSA is considered constant, the difference
in available torque between the two arm positions is due to
a change in the moment arms.

103
Figure 0.7: Predicted muscle activation for various torques
To examine the predicted activation levels and explore how they have changed
the same torques were used as in figure Figure 0.5 however, because of the different arm
orientation most of the torque combinations were in the infeasible space so the UR torque
was adjusted until a feasible solution was found. In the first graph, the UH torque is set to
8 Nm while the UR torque is set to zero. It will be noted that activation is similar to the
previous example except that the bicep long is now slightly activated. This is likely
because its available torque has increased because of a change in its moment arm, thus
making it more effective and also because the brachioradialis’ available torque about the
UR has also increased which indicates that this muscle creates more undesired torque
about the UR, which much be countered by the pronator teres, who’s activation level has
also increased. The brachialis is still fully activated because its moment arm has not
changed significantly when compared to the previous example and it does not create and
torque about UR.
Figure 0.8: Predicted muscle activation levels for the muscles of the lower arm with a desired torque of 23.1 Nm about the UH joint and 2 Nm about the UR joint
In the second graph of Figure 0.7 the UH torque is held at 8 Nm while the UH
torque is increased until it is just at the edge of the feasible region. Interestingly we are
only able to generate 1.6 Nm in UR torque, which is less than the 2 Nm in the previous

104
example, even though the available torques about the UR joint have not changed
significantly. A major difference noted between this and the previous example is the near
full activation of all the extensor muscles indicating that excessive positive torque is
being created about the UH joint in order to achieve the desired UR torque. Further
inspection will reveal that the muscle with the smallest available torque about the elbow
(with exception to the pronator teres, which is not being used because it also creates
negative torque about the UR joint) is the only flexion muscle that is fully activated. In
fact the only other flexion muscle activated is the brachioradialis, which also has the
largest amount of available torque about the UR joint. So, what has happened is that the
moment arms used to create the UR torque have not changed significantly but the
moment arms about the UH joint have and since positive UR torque is primarily
generated by the biceps and the brachioradialis the activation needed to create the UR
torque is creating excessive positive torque about the UH. Therefore, if more torque is
allowed about the UH then the extensor muscles will be able to relax and the graph will
begin to look more like the previous example as can be seen in Figure 0.8 where the UH
torque is raised to 23.1 Nm and the UR joint torque is raised to 2 Nm.
Next the UH joint torque is raised to 16 Nm and the UR joint torque is raised to
2.4 Nm in order to compare with the previous example. Note that in the previous
example, the UR joint torque was set to 2.5 Nm, however in this configuration this was
just outside of the feasible space so the UR joint torque was set to 2.4, which was within
the feasible space. The result is displayed as the third graph in Figure 0.7. Again, all the
extensor muscle are active while only two of the flexion muscles are being used
indicating that excessive torque is being generated about the UH joint. As with the
previous scenario, the significant increase in the moment arms of the biceps and
brachioradialis about the UH joint while having insignificant increases in the moment
arms about the UR joint have reduced the feasible space. Allowing more torque about the
elbow expands the feasible space and results in an activation pattern similar to the

105
previous example, as is shown in Figure 0.9 where the UH joint torque was raised to 38.7
Nm and the UR joint torque was raised to 2.5 Nm.
Figure 0.9: Predicted muscle activation levels for the muscles of the lower arm with a desired torque of 36.7 Nm about the UH joint and 2.5 Nm about the UR joint
The final graph in Figure 0.7 shows the result of setting the UH torque to –4.1 and
the UR torque to 0.2. Because the available torque of the extension muscles has
decreased so has the feasible space. This can be observed in the graph by noting that
nearly all the extensor muscles are fully activated, including the supinator 1 muscle,
which also creates positive torque about the UR axis. Therefore, if less UR torque is
desired there are two options. One is to create positive UR torque with the pronator teres
in order to counter the torque being generated by the supinator muscle. However, this
would cause positive torque about the UH joint as well, which would have to be
countered with the triceps lateral. The other option is to relax the supinator 1 so as to
reduce the amount UR torque it is creating. However this will also reduce the amount of
negative torque it is contributing to the UH joint. This reduction will have to be balanced
with an increase of activation in the tricep lateral. Either solution will require the triceps
lateral to have an increase in activation and from the graph is can be observed that it is
already nearly fully activated. Conversely, if more torque was desired about the UR there
are again two solutions. One is to allow the supinator 1 muscle to become more active,
thus increasing the torque about the UR joint and also contributing more negative torque

106
to the UH joint. This will have to be balanced by a reduction in the activation of the other
extension muscles. However, one will note that this solution is maximized when the
supinator 1 muscle is fully activated, which it nearly is already. The other solution is to
create more torque about the UR with one of the bicep muscles. However, any activation
of the bicep will cause positive torque about the UH, which will have to be balanced by
the extensor muscles who are already nearly fully activated.
In the previous two examples the elbow was flexed while the UR joint was left
fixed. In the next three examples, the elbow will be left fixed at about mid flexion and the
hand will be pronated then supinated to observe what changes that causes. The first of
these three examples is shown in Figure 0.10 where the hand is neutral. Displayed is the
max torque about each joint for each action line as well as the predicted activation level
for the muscles for two different torque configurations.
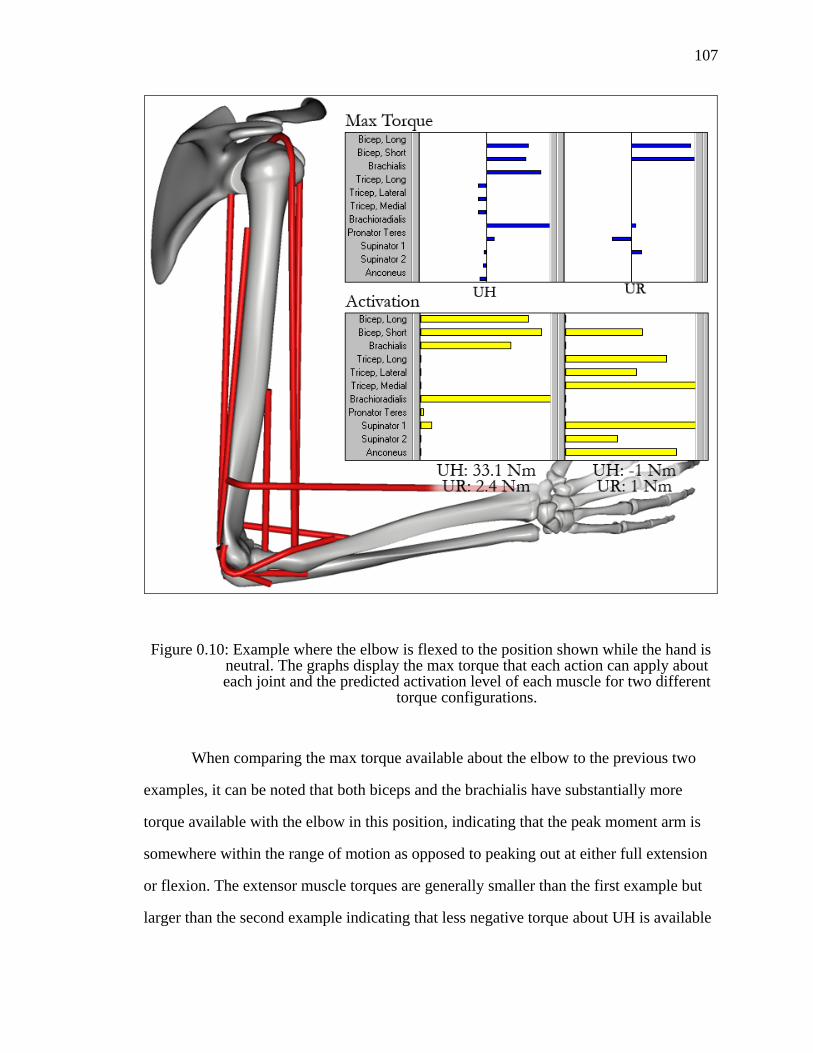
107
Figure 0.10: Example where the elbow is flexed to the position shown while the hand is neutral. The graphs display the max torque that each action can apply about each joint and the predicted activation level of each muscle for two different
torque configurations.
When comparing the max torque available about the elbow to the previous two
examples, it can be noted that both biceps and the brachialis have substantially more
torque available with the elbow in this position, indicating that the peak moment arm is
somewhere within the range of motion as opposed to peaking out at either full extension
or flexion. The extensor muscle torques are generally smaller than the first example but
larger than the second example indicating that less negative torque about UH is available
108
as the arm is flexed. When comparing the max torques about the UR joint the biceps
again are significantly larger than in the previous two examples. There is not much
change in the rest of the moment arms.
To observe the activation levels of the muscles two torque configurations are
presented. These same configurations will be used in the next two examples so as to
understand the effects of hand pronation and supination. The first graphs displays the
predicted activation levels to achieve 33.1 Nm about the UH joint and 2.4 Nm about the
UR joint. It should be noted that all the flexion muscles are activated somewhat equally
with exception for the pronator teres, which is likely not being used because it generates
negative torque about the UR joint and has a relatively small amount of effective torque
about the UH. The brachioradialis is fully active because it has the largest moment arm
about the elbow it also contributes to the positive torque about UR. The bicep short is the
second most activated muscle even through it has the second shortest moment arm about
the UH. However it also has the largest available torque about the UH joint, thus
significantly contributing to the UR torque.
In the second activation graph the UR torque is set to 1 Nm and the UH is set to
–1 Nm. As expected, all the extensor muscles are active with one of the triceps and the
supinator 1 completely active. Also active is the bicep short, which indicates that the
supinator 1 muscle does not have enough capacity to generate the desired torque about
the UR joint. The bicep short is likely being used because it has the most available
positive torque about the UR joint and compared to the other muscles available to create
positive torque about the UR it has the lowest effect on the positive moment about UH
(except for the supinator 1 muscles, which is already fully activated). However, the bicep
short is also creating positive torque about the elbow, which must be balanced the
extensor muscles. By observing the relative sizes of the max torque available to the
extensor muscles and the bicep short, it can be observed that a slight increase in the
activation of the bicep short will have to be countered by a significant change in the

109
extensor muscles. For example, consider if the bicep short were to increase its activation
by 0.1. For this to be countered by one of the tricep muscles, who’s available torque is
about five times smaller, it would have to increase it’s activation level by approximately
0.5. Therefore, it can be concluded that any slight increase in the amount of positive
torque about the UR is going to limit the amount of available negative torque about the
UH because the extensors will have to use more torque to counter the increase of the
positive torque being created about the UH.
In the next example, the elbow is held in the same position while the hand is
pronated as shown in Figure 0.11. When comparing the max torques of this example to
the previous example it is interesting to note that the torques about the UH show no
significant change while all the max torques except for the supinator 1 show significant
changes about the UR axes. The max torque of both the biceps have dropped
substantially while the brachioradialis has as increased dramatically. Also, the pronator
teres has changed signs, indicating that there are no muscles available to create and
pronation torque.
When comparing the activation levels of this example with the previous example
some slight differences can be observed. Since there was insignificant changes in the max
torques about the UH, the changes in activation can be attributed to the changes in the
moment arms about the UR joints. In the first activation graph of Figure 0.11 where the
UH and UR torques are set to 33.1 Nm and 2.4 Nm, respectively, the supinator 1 is no
longer active, the brachialis is now fully active, and the biceps activation have been
somewhat reduced. The reduction of the biceps and the supinator 1 indicate that the
brachioradialis is now able to create the majority of the UR torque needed, which is
reasonable considering the increase in its available torque. This is further emphasized by
the increased activation of the brachialis, which does not create any UR torque.
Furthermore it should be noted that the two muscles with the most available torque about
UH are the two muscles that are fully activated.

110
Figure 0.11: Example where the elbow is flexed to the postion shown while the hand is pronated. The graphs display the max torque that each action can apply about each joint and the predicted activation level of each muscle for two different
torque confuguratons.
Looking at the second activation graph in Figure 0.11 a more significant change
can be noted, particularly in the bicep short and the pronator teres. The bicep is no longer
active while the pronator teres is now full active. This is likely because pronator teres
now has the ability to create significant positive torque about the UR joint while creating
a smaller amount of positive torque about UH joint as compared to the bicep short
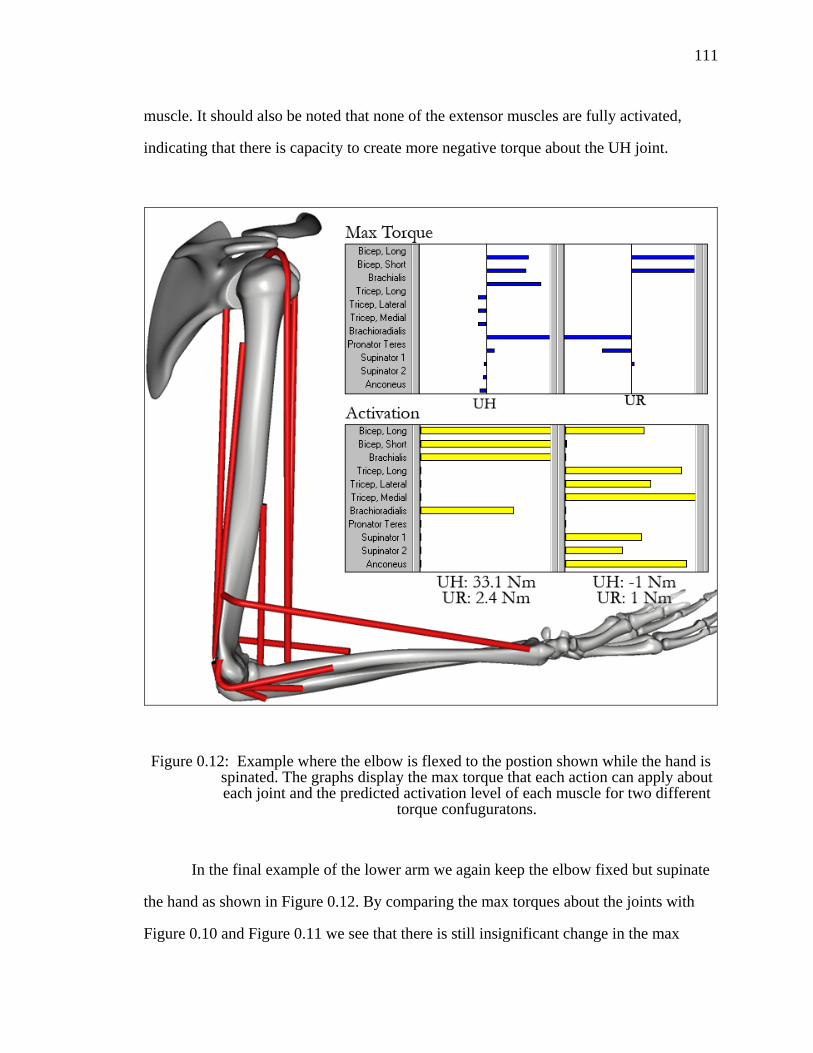
111
muscle. It should also be noted that none of the extensor muscles are fully activated,
indicating that there is capacity to create more negative torque about the UH joint.
Figure 0.12: Example where the elbow is flexed to the postion shown while the hand is spinated. The graphs display the max torque that each action can apply about each joint and the predicted activation level of each muscle for two different
torque confuguratons.
In the final example of the lower arm we again keep the elbow fixed but supinate
the hand as shown in Figure 0.12. By comparing the max torques about the joints with
Figure 0.10 and Figure 0.11 we see that there is still insignificant change in the max

112
torques about UH and significant changes in the max torques about the UR joint. The
biceps both have max torque values similar to when the hand is in its neutral position
(Figure 0.10) while the brachioradialis is now creating substantial pronation torque along
with the pronator teres and the supinator 1 has very little capacity for creating torque on
either joint.
In comparing the first activation graph we see that this graph is more similar to
when the hand is pronated than when the hand is neutral except the brachioradialis is less
active while the biceps activity has increased. This is likely because activating the
brachioradialis now creates substantial pronation torque, which must be balanced by the
biceps. It is interesting to note that nearly all the flexion muscles are fully activated with
exception of the pronator teres, which cannot contribute much to the UR torque and will
also create negative torque about the UR joint. This torque will have to be balanced but
the biceps are already fully activated which implies that this torque must be countered by
the supinator 1, whose available torque is fairly insignificant. Therefore it can be
ascertained that 33.1 Nm is nearing the limit of UH torque in this configuration while
requiring 2.4 Nm about the UR joint. If the required torque about the UR joint is reduced,
then both the brachioradialis and the pronator teres will be able to create more positive
torque about the UH joint because further activation of either of these muscles will create
more negative torque about the UR joint.
The second activation graph of Figure 0.12 show the predicted muscle activation
levels for a torque of –1 Nm about the UH and 1 Nm about the UR. The result is quite
similar to the predicted activation when the hand is in the neutral position (Figure 0.10)
except the bicep long is active instead of the bicep short and the supinator 1 activation
level has dropped while the anconeus has increased slightly. This could be because the
available torque from the supinator 1 has been reduced, thus making it less effective for
creating UR torque. Therefore its activity was reduced and the anconeus was activated to
make up for the negative torque about the UH that the supinator 1 previously created. It is

113
unclear why the bicep muscles have flipped activation. It is possible the bicep long
muscle is slightly more effective at creating UR torque than the bicep short but this
cannot be seen in the graph.
Pectoral Girdle
The pectoral girdle consists of three joints and 24 action lines representing 16
muscles. The joints are the sterno-calvicular (SC), the acromio-clavicualar (AC) and the
gleno-humeral (GH). The action lines are shown in Figure 0.13. Note that this figure does
not show two action lines which are the trapezius long extending from the ulna to the
scapula and the bicep long which extends from the radius to the scapula (refer to Figure
0.2).
Figure 0.13: Action lines of the pectoral girdle
After looking at Figure 0.13 one begins to understand just how complex the
pectoral girdle is. Not only does it have 24 action lines, it also has three spherical joints.

114
Furthermore, many of the action lines cross all three joints, thus having the possibility to
create torque about nine different axes. In the previous section, we were dealing with two
rotation axes so understanding the predicted activation levels was fairly simple. This will
not be the case for the shoulder muscles. In this section several examples will be
presented along with the corresponding data. To make analysis somewhat easier, only the
max torque about the SC and GH joint will be presented along with some activation
results.
Figure 0.14: Example of the pectoral girdle. Graphs display max torque about the SC and GH joint
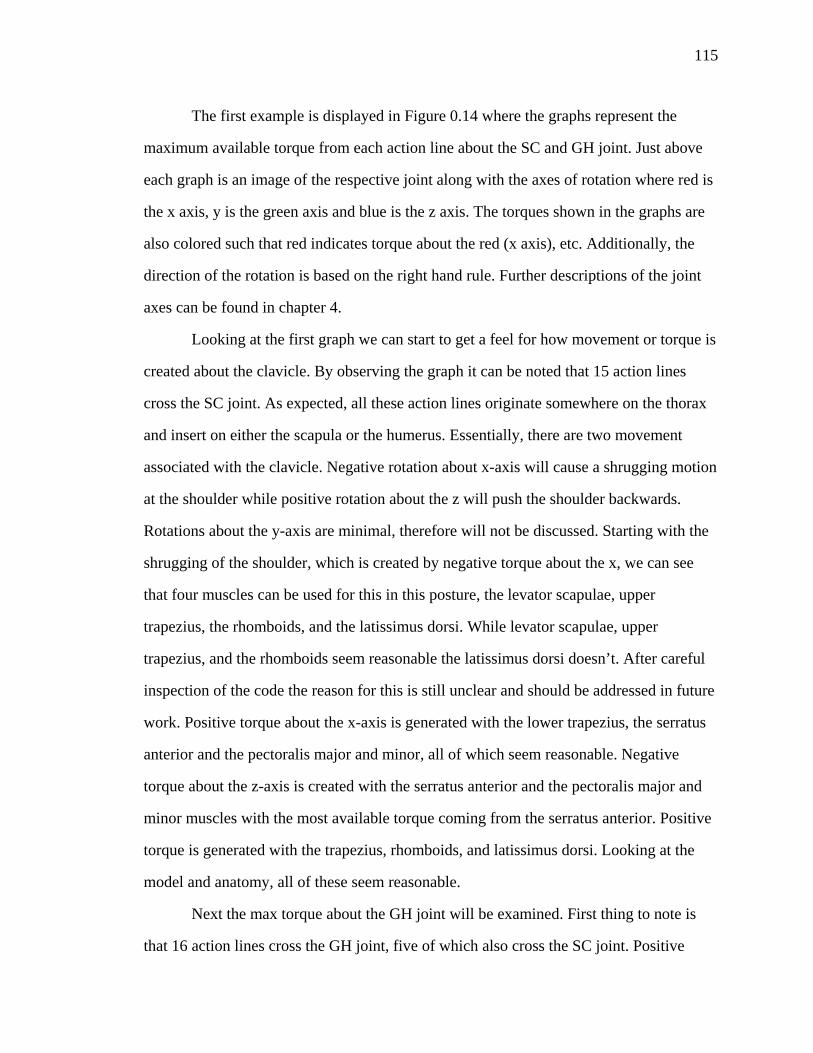
115
The first example is displayed in Figure 0.14 where the graphs represent the
maximum available torque from each action line about the SC and GH joint. Just above
each graph is an image of the respective joint along with the axes of rotation where red is
the x axis, y is the green axis and blue is the z axis. The torques shown in the graphs are
also colored such that red indicates torque about the red (x axis), etc. Additionally, the
direction of the rotation is based on the right hand rule. Further descriptions of the joint
axes can be found in chapter 4.
Looking at the first graph we can start to get a feel for how movement or torque is
created about the clavicle. By observing the graph it can be noted that 15 action lines
cross the SC joint. As expected, all these action lines originate somewhere on the thorax
and insert on either the scapula or the humerus. Essentially, there are two movement
associated with the clavicle. Negative rotation about x-axis will cause a shrugging motion
at the shoulder while positive rotation about the z will push the shoulder backwards.
Rotations about the y-axis are minimal, therefore will not be discussed. Starting with the
shrugging of the shoulder, which is created by negative torque about the x, we can see
that four muscles can be used for this in this posture, the levator scapulae, upper
trapezius, the rhomboids, and the latissimus dorsi. While levator scapulae, upper
trapezius, and the rhomboids seem reasonable the latissimus dorsi doesn’t. After careful
inspection of the code the reason for this is still unclear and should be addressed in future
work. Positive torque about the x-axis is generated with the lower trapezius, the serratus
anterior and the pectoralis major and minor, all of which seem reasonable. Negative
torque about the z-axis is created with the serratus anterior and the pectoralis major and
minor muscles with the most available torque coming from the serratus anterior. Positive
torque is generated with the trapezius, rhomboids, and latissimus dorsi. Looking at the
model and anatomy, all of these seem reasonable.
Next the max torque about the GH joint will be examined. First thing to note is
that 16 action lines cross the GH joint, five of which also cross the SC joint. Positive

116
torque about the x-axis will cause the arm to want to hyperextend. This torque is created
by the posterior deltoid, lateral deltoid, teres major, latissimus dorsi, and the tricep long
with most of the available torque coming from the posterior deltoid. Negative torque
about the x-axis is generated by the pectoralis major, coracobrachialis, supraspinatus, and
anterior deltoid with most of the available torque coming from the deltoid. Positive
rotation about the y-axis will cause internal rotation of the arm. Most of the available
torque about this movement is created by the subscapularis with smaller amounts coming
from the pectoralis, anterior deltoid, and teres major. Torque for external rotation is
mostly available from the infraspinatus with small amounts available from the posterior
deltoid and teres minor. Negative torque about the z-axis will cause abduction of the arm
while positive torque will result in adduction of the arm. Most of the negative torque is
supplied by the lateral deltoid, with additional contributions coming from the
supraspinatus, posterior deltoid, subscapularis and the bicep long. Adduction torque is
mostly created by the pectoralis major, coracobrachialis, anterior deltoid, teres major,
with less torque coming from infraspinatus, latissimus dorsi, and long tricep. Comparing
these available torques to anatomical data shows all are reasonable.
Next we will explore the how the muscles are activated to achieve certain torques.
To keep the analysis reasonable, only one torque about a single axis will be considered at
a time. Note the arm is still in the same configuration as shown in Figure 0.14. The first
torque considered is –30 Nm about the x-axis (red axis in Figure 0.14) of the SC joint.
This torque is similar to some of the torque needed to carry a backpack or to shrug. The
result is shown in Figure 0.15. As expected the two muscles with the most available
torques are the most activated. What it interesting to note is the reaction of the other
muscle that are trying to balance the rest of the joint axes to zero (all the GH torques are
constrained to 0 Nm along with the z axis of the SC joint). Nine muscles are significantly
activated but only three of them are able to contribute any torque to the negative x-axis of
the SC joint while the upper serratus anterior muscle and the lower pectoralis major both
117
contribute positive torque to the x-axis. These muscles are likely being activated to
counter the positive z torque being created by the upper trapezius, which in turn cause the
shoulder muscles to become active in order to counter the torques the pectoralis is
creating about the GH joint.
Figure 0.15: Predicted muscle activation to create -30 Nm of torque about the x axis of the SC joint
Next, the torque about the SC x value is returned to zero and the torque about the
z-axis of the SC joint (blue axis in Figure 0.14) is set to –15 Nm. The result is shown in
Figure 0.16. Again, the two muscles with the most available negative torque are the most
activated muscles. This time 10 muscles are activated, four of which contribute some of
the desired negative torque. All four of these also create positive torque about the x-axis
of the SC joint, which is countered by the levator scapulae and the trapezius. Also, is with
the previous example, some of the shoulder muscles are activated to counter the moments
created by the pectoralis major muscles about the GH joint.

118
Figure 0.16: Predicted muscle activation to create -15 Nm of torque about the z-axis of the SC joint
Figure 0.17:Predicted muscle activation to create -15 Nm of torque about the z-axis of the GH joint

119
Now the torques about the SC will be set to zero and the torque about the z-axis
of the GH (blue axis in Figure 0.14) is set to –15 Nm resulting in Figure 0.17. This is the
type of torque that would be seen when a subject is trying to abduct the arm from the
torso. As expected the lateral deltoid is the most active muscle because it has the most
available negative torque about the z-axis. This muscle also creates some positive torque
that must be countered, which is likely why the anterior deltoid and supraspinatus are
active.
Figure 0.18: Predicted muscle activation to create -15 Nm of torque about the x-axis of the GH joint
The z torque about the GH joint is returned to zero and a –15 Nm torque is
applied to the x-axis of the GH joint (red axis in Figure 0.14), resulting in Figure 0.18.
This is the type of torque one would see if a subject was attempting to raise their elbow
up in front of their body. The anterior deltoid is the most activated muscle, which is
reasonable considering the amount of available negative torque is holds. The only other
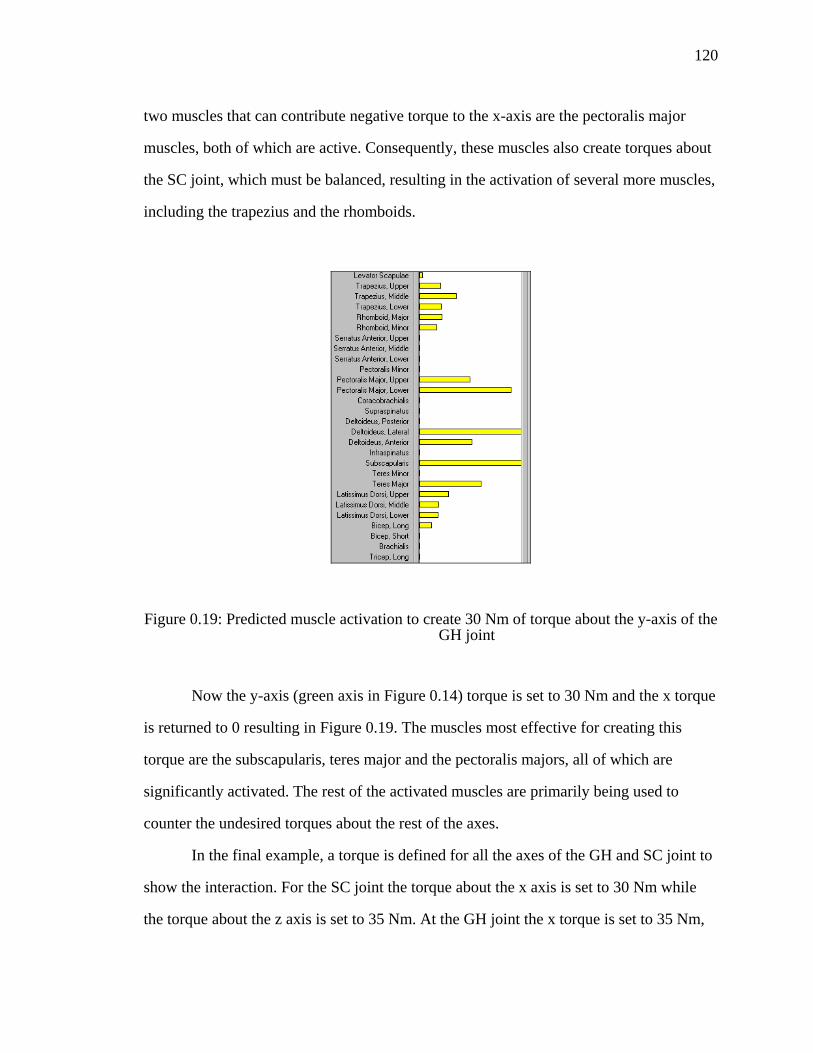
120
two muscles that can contribute negative torque to the x-axis are the pectoralis major
muscles, both of which are active. Consequently, these muscles also create torques about
the SC joint, which must be balanced, resulting in the activation of several more muscles,
including the trapezius and the rhomboids.
Figure 0.19: Predicted muscle activation to create 30 Nm of torque about the y-axis of the GH joint
Now the y-axis (green axis in Figure 0.14) torque is set to 30 Nm and the x torque
is returned to 0 resulting in Figure 0.19. The muscles most effective for creating this
torque are the subscapularis, teres major and the pectoralis majors, all of which are
significantly activated. The rest of the activated muscles are primarily being used to
counter the undesired torques about the rest of the axes.
In the final example, a torque is defined for all the axes of the GH and SC joint to
show the interaction. For the SC joint the torque about the x axis is set to 30 Nm while
the torque about the z axis is set to 35 Nm. At the GH joint the x torque is set to 35 Nm,

121
the y torque is set to –8 Nm and the z torque is set to 35 Nm. The result is shown in
Figure 0.20. One thing to note about this figure is that the activation levels of the muscles
usually only associated with the lower arm are also shown. Even though zero torque is
desired about the elbow several of these muscles are activated. This is because of the
tricep long is activated to help satisfy the torques about the shoulder, resulting in torque
generated on the ulna must which must be balanced.
Figure 0.20: Predicted muscle activation for selected torques about the GH and SC joint
For the last two examples the arm will be moved to two different postures and the
max torque for each muscle about both the SC and GH joint will be displayed to
demonstrate that the amount of available torque is dependent on the arm posture. In the
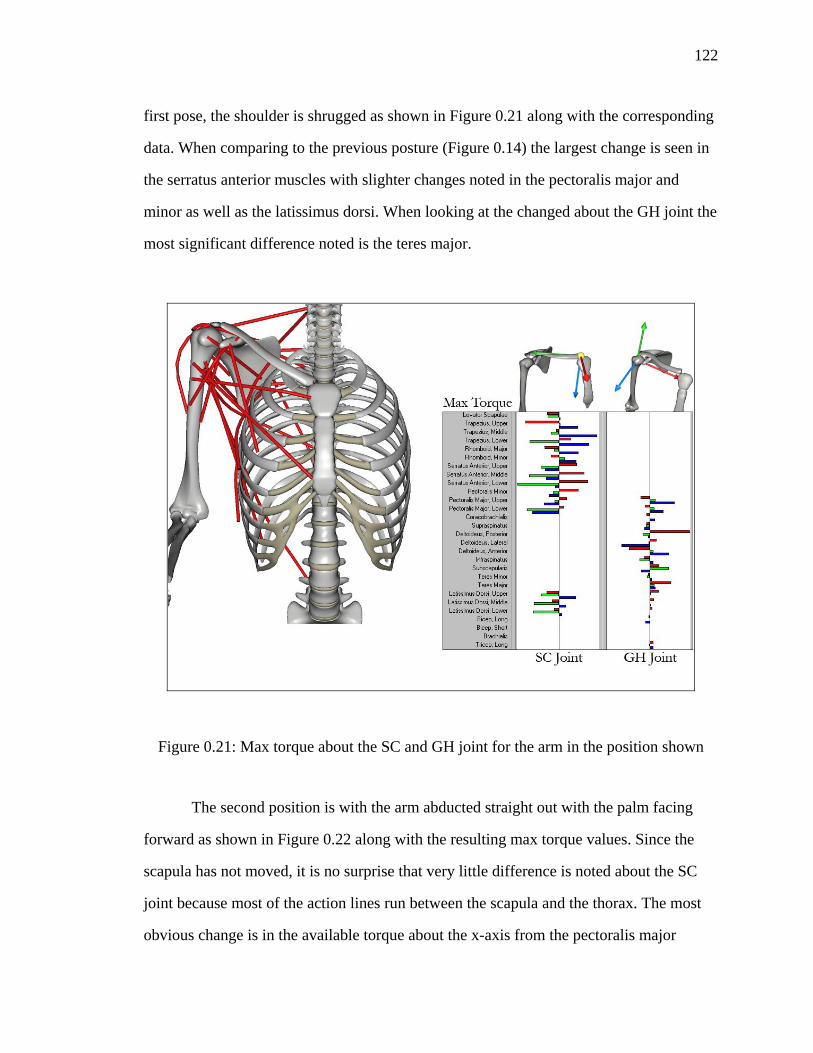
122
first pose, the shoulder is shrugged as shown in Figure 0.21 along with the corresponding
data. When comparing to the previous posture (Figure 0.14) the largest change is seen in
the serratus anterior muscles with slighter changes noted in the pectoralis major and
minor as well as the latissimus dorsi. When looking at the changed about the GH joint the
most significant difference noted is the teres major.
Figure 0.21: Max torque about the SC and GH joint for the arm in the position shown
The second position is with the arm abducted straight out with the palm facing
forward as shown in Figure 0.22 along with the resulting max torque values. Since the
scapula has not moved, it is no surprise that very little difference is noted about the SC
joint because most of the action lines run between the scapula and the thorax. The most
obvious change is in the available torque about the x-axis from the pectoralis major

123
action lines. When observing the changes about the GH joint, several changes can be
noted. In this position, the pectoralis major muscles have lost most of their capacity for
adducting the arm (positive torque about the z-axis) while the subscapularis capacity has
increased. The posterior deltoid is still the largest producer of positive torque about the x-
axis even thought its capacity has been reduced.
Figure 0.22: Max torque about the SC and GH joint for the arm in the position shown
Comparison with Experimental Data
In the previous sections we have demonstrated that our model produces
reasonable moments as far as direction and relative magnitude is concerned but how does
this compare to previous studies. Preliminary comparison was achieved by plotting the
moment arms of five action lines as the elbow moved from full extension (0°) to flexion

124
(120°) with the hand in the neutral orientation as shown in Figure 0.10. By doing this we
could compare our results to the results shown by Murray et al, who compared their
model and results to six other studies (Murray et al, 1995). The result is shown in Figure
0.23.
Figure 0.23: Comparison of our proposed model to previous studies

125
In order to compare the results, our model was scaled so it was similar in size to
the model presented by Murray et al. This was accomplished by uniformly scaling our
model until the length of the humerus was 30.3 cm as defined by Murray et al. It can be
observed from Figure 0.23 that the moment arms calculated by our model fit reasonably
well with the data presented in previous studies, especially the bicep, brachioradialis, and
pronator teres. The triceps, while maintaining a shape that is similar to the other data it
seems to like it needs to be shifted down about 1 cm. Because the shape is fairly
consistent with the previous studies this seems to indicate that the insertion point may
need to be adjusted. The brachialis moment arm starts out within the range of the
previous studies but then arc out too low at the end. Furthermore, its peak happens at
about 80° while the others either peak out at the end of the flexion. This seems to indicate
that the wrapping obstacles need to be adjusted.
Conclusions
In this chapter we have presented several examples of our model. In all the examples the
results were discussed and everything seems to be quite reasonable. In comparing our
moment arms to previous studies the data was shown to fit although some modifications
to the model could improve the fit. Further validation should include comparing the
predicted muscle levels to EMG studies and comparing the rest of the calculated moment
arms to experimental data. It should be noted that all the examples were able to run in
real time with the frame rates of the simulation of the never dropping below 60 frames
per second. While interacting with the joints or joint torques no obvious delay was
noticed between user input and data output.

126
CONCLUSIONS AND FUTURE WORK
Conclusions
This thesis has addressed the modeling and simulation of the musculoskeletal
system of the shoulder girdle and upper extremity by combining real time simulation
methods, advanced CAD modeling techniques, optimization methods, and new methods
for characterizing muscle wrapping about anatomical structures.
It has been shown that real time simulation is effectively used to simulate
kinematic movement of the upper limb while monitoring in real time predicted activation
level, moment arms, and available torque for all the muscles crossing the sterno-
clavicular, acromio-clavicular, gleno-humeral, ulna-humeral, and ulna-radial joints.
It has been shown that muscle activation is calculated in real time for every
individual muscle during motion from optimization based on a cost function and
constraints.
It has been shown that the system developed with 35 action lines and five bones
with 7 DOF representing the shoulder girdle and upper extremity can be simulated in a
3D interactive visual environment in real time allowing a user to explore various muscle
activation levels by changing loading conditions and joint angles.
It has been shown that optimization methods are well suited for the real time
prediction of muscle activation, particularly when appropriate cost functions are selected
It has been shown that significantly higher accuracy of muscle activation can be
obtained by accounting for muscle wrapping around underlying anatomical structures. A
new method for muscle wrapping was developed using floating via points, which has
allowed for the action line of the muscle to be more accurately represented by the
centroid line of the muscle.

127
A graphical user interface was developed to allow for a user to interact in real
time with the musculoskeletal system, changing the loading conditions and joint angles
while receiving feedback.
Compared with experimental results published in literature, it was shown that our
system yields results of the muscle moment arms are very consistent with published data.
Furthermore, when observing the actions of the muscles on the bones as predicted by our
model the result correlated with anatomical data.
Future Work
The amount of work that can be continued on this project is immense. This
section will attempt to summarize some of the work which we feel should be added next.
• Further verification is obviously a very important next step. This
verification should compare more muscle moment arm prediction to
literature and also start comparing activation prediction to previous
studies.
• Include ligament about the joints, which are used to stabilize the joints.
This is especially true for the elbow. In the current formulation, the
torques generated about the x and y axis of the elbow are ignored. If
ligaments are added to the model these could be used to resist torque about
these axes resulting in additional constraints for the optimization
formulations that stipulate that the torques generated about the x and y
axis must balance out to zero.
• Calculate and return joint reaction forces to the user. Not only could this
information be useful to the user but also it may be used as an additional
constraint by limiting the amount of force allowed within the joint.
Furthermore, this may be useful for including joint friction.

128
• Expand the model to the other arm and legs and reevaluate the
performance. The current model has not hindered real time performance
and it appears to have quite a bit of room to expand. Adding additional
action lines for some muscles may also be appropriate.
• Add robustness to the wrapping algorithm so that it can handle when
either the insertion or origin are moved within an object. Simply simply
moving the point or shrinking the obstacle until it is no longer within the
obstacle could handle this.
• Changing the color of the force lines based on activation level would be
useful for conceptualizing how the muscles reacting to different torque
loads and arm configurations. For instance, the lines would look blue if
there is no activation and slowly change to bright red as the muscle is
activated
• Vary the cost function of the prediction algorithm and observe the effect
of different conditions. Much improvement can be added to the muscle
prediction algorithm. More detailed muscle parameters should be used for
determining the maximum available force. Fatigue could possiblely be
incorporated with the formulation as presented by Komura et al (Komura
et al, 2000) while co-contraction could be addressed by the paper
presented by Foster et al (Foster et al, 2004).
• Now that we know force direction and location, this model could be
expanded to incorporate physics.

129
REFERENCES
Amis, A. A., Dowson, D., Wright, V. (1979) “Muscle strengths and Musculoskeletal geometry of the upper limb”, Engng Med., 8, 41-48
Amis, A.A., Dowson, D., Wright, V., (1980) “Elbow Joint Force Predictions for some Strenuous Isometric Actions”, J. Biomechanics, 13, 765
An, K. N., Hui, F. C., Morrey, B. F., Linscheid, R. L. and Chao, E. Y. (1981) Muscles “Across the elbow joint: A Biomechanical Analysis”. J. Biomechancs 14, 659-669
An, K. N., Kwan, B. M., et al., (1984) “Determination of muscle and joint forces: a new technique to solve the indeterminate problem.” Journal of Biomedical Engineering, 106 (4), 164-367
An, K. N., Takahashi, K. Harrigan, T. P., Chao, E. Y. (1984) “Determination of muscle orientation and moment arms”, J. biomech. Engn, 106, 280-282
Anderson, F.C., Pandy, M.G., (1999) “A Dynamic Optimization Solution for Vertical Jumping in Three Dimensions.” Computer Methods in Biomechanics and Biomedical Engineering, 2, 201-231
Berme, N., Heydinger, G., and Cappozzo, A., (1987) “Loads Transmitted at the Anatomical Joints”. In A. Morechi (ed) Biomechanics of Engineering: Modeling, Simulation, Control, Wien, New York
Blemker, S.S., Delp, S. L., (2005) “Three-dimensional representation of complex muscle architectires and geometries” Annals of Biomedical Engineering, 33, 5, 661-673
Chadwick, E.K., Nicol, A.C., (2000) “Elbow and wrist joint contact forces during occupational pick and place activities.” J. Biomechanics, 33 (5), 591-600
Chao, E.Y. S., (2003) “Graphic-based musculoskeletal model for biomechanical analyses and animation”, Medical Engieering & Physics, 25, 201-212
Crowninshield, R.D., (1978) “Use of optimization techniques to predict muscle forces”, Transactions of the ASME, 100, 72
Crowninshield, R.D., Brand, R.A., (1981) “A physiological based criterion of muscle force prediction in locomotion.” J. Biomechanics 14 (11), 793-801
Davy, D.T., Audu, M.L., (1987) “A dynamic optimization technique for predicting muscle forces in the swing phase of gait”, J. Biomechanics, 20, 187-201
Delp, S. L., Loan, J. P. (1995) “A graphics-based software to develop and analyze models of musculoskeletal structures”, Comput. Biol. Med. 25, 1, 21-34
DeLucam C.J., Forrest, W.J., (1973) “Force analysis of individual muscles acting simultaneously on the shoulder during isometric abduction”, J. Biomechanics, 6, 385-393
Dvir, Z. and Berme, N. (1978), “The Shoulder Complex in Elevation of the Arm: A Mechanism Approach”, Journal of Biomechanics, 11, 219-255

130
Engin, A. E. (1984), “On the Theoretical Modelling of Human Joints”. In Mathematical Modelling in Science and Technology (ed. J. R. Avula), Pergamon Press, New York, pp. 560-565
Engin, E. (1980), “On the Biomechanics of the Shoulder Complex”, Journal of Biomechanics, 13, 575-590
Forster, E., Simon, U., Augat, P., Claes, L., (2004) “Estension of a state-of-the-art optimization criterion to predict co-contraction”, J. Biomechanics, 37, 577-581
Gill, P. E., Murray, W., Saunders, M. A., (2002) “SNOPT: An SQP algorithm for large-scale constrained optimization”, Siam J. Optim., 12, 4, 979-1006
Glitsch, U., Baumann, W., (1997) “The three-dimensional determination of internal loads in the lower extremity.” J. Biomechanics, 30 (11-12), 1123-1131
Happee, R., (1994) “Inverse dynamic optimization including muscular dynamics, a new simulation method applied to goal directed movements.” J. Biomechanics 27 (7), 953-960
Helm, F. C. T, Veenbaas, R. (1991), “Modelling the Mechanical Effect of Muscles with Large Attachment Sites: Application to the Shoulder Mechanism”, Journal of Biomechanics, 27, 1151-1163
Helm, F. C. T. (1994), “A Finite Element Musculoskeletal Model of the Shoulder Mechanism”, Journal of Biomechanics, 27, 551-569
Helm, F. C. T. and Pronk, G. M. (1995). “Three-Dimensional Recording and Description of Motions of the Shoulder Mechanism”, Journal of Biomechanical Engineering, 117, 27-40
Hogfors, C., Sigholm, G., and Herberts, P. (1987), “Biomechanical Model of the Human Shoulder – I. Elements”, Journal of Biomechanics, 20, 157-166
Jackson, K. M., Joseph, J., Wyard, S. J., (1977) “Sequential muscular contraction”, J. Biomechanics,10, 97-100
Jenesn, R. H. and D. T. Davy (1975) “An Investigation of Muscle Lines of Action About the Hip: A Centroid Line Approach VS the Straight Line Approach”. J. Biomechanics 8, 103-110
Kaufman, K.R., An, K.W., et al (1991) “Physiological prediction of muscle forces-I. Theoretical formulation.” Neuroscience 40 (3) 781-792
Kim, J., Abdel-Malek, K., Yang, J., Farrell, K., Nebel, K., (2005) “Optimization-Based dynamic motion simulation and energy expenditure prediction for a digital human” SAE Digital Human Modeling for Design and Engineering, June, Iowa City, IA USA.
Kimura, T., Shinagawa, Y., Kunni, T. L., (2000) “Creating and retargeting motion by the musculoskeletal human body model”, The Visual Computer, 16, 254-270
Kinzel, G. L. and L. J. Gutkowski (1983), “Joint Models, Degrees of Freedom, and Anatomical Motion of Measurements”, Journal of Biomechanical Engineering, 105, 55-61

131
Li, G., Kaufman, K.R., et al., (1999) “Prediction of antagonistic muscle forces using inverse dynamic optimization during flexion/extension of the knee.” Journal of Biomedical Engineering 121 (3) 316-322
Li, G., Pierce, J. E., Herndon, J.H., (2004) “A global optimzation method for prediction of muscle forces of human musculoskeletal system.” J. Biomechancs, Accepted 2004
Maurel, W., Thalmann, D. (1999), “A case study on human upper limb modeling for dynamic simulations”, Computer Methods in Biomechanics and Biomedical Engineering, Vol 2, No. 1, pp 65-82
Maurel, W., Thalmann, D., Hoffmeyer, P., Beylot, P., Gingins, P., Karla, P., Thalmann, , N. (1996), “A Biomechanical Musculoskeletal Model of Human Upper Limb for Dynamic Simulation”, EGCAS ’96, 7th Eurographics Workshop on Computer Animation and Simulation ’96 (Springer Poitiers 1996), 121-136
Mikosz, R. P., McKersie, R., Berg, R. Snitovsky, P., Lobick, J., Logue, S., Andersson, G. B. J. and Andriacchi, T. P (1988) “Muscle Lines of Action in the Lower Extremity: A cetntroid line approach vs the straight line approach”. Proc. 12th Am Soc Biomechanics. Pp 30-31, Urbana-Champaign, IL.
Murray, W. M., Delp, S. L., Buchanan, T. S. (1995) “Variation of muscle moment arms with elbow and forearm position”, J. Biomechanincs, 28, 5, 513-525
Pedotti, A., Krishnan, V. V., et al (1978) “Optimization of the muscle force sequencing in human locomotion.” Mathematical Biosciences 38, 57-76
Poppen, N.K., Walker, P.S., (1978) “Forces at the glenohumeral joint in abduction”, Clin. Orthop Rel. Res.,135, 165-170
Praagman, M. Chadwick, E.K.J., Helm, F.C.T. van der, Veeger, H.E.J. (2004) “The relationship between two different mechanical cost functions and muscle oxygen consumption.” J. Biomechanics, Accepted 2004.
Raikova, R. (1992), “A General Approach for Modelling and Mathematical Investigation of the Human Upper Limb”, Journal of Biomechanics, 25, 857-867
Raikova, R. (1996) “A model of the flexion – extension motion in the elbow joint – some problems concerning muscle forces modeling and computation” J. Biomechanics, 29, 6, 763-772
Seireg, A. and Avikar, R.J. (1973) “A mathematical model for the evaluation of forces in the lower extremeties of the musculoskeletal system.” J. Biomechanics 6, 313-326
Tozeren, A., (2000) Human Body Dynamic, N.Y.: Springer-Verlag
Van Zuylen, E. J., van Zulzen, A., Denier van der Gon, J. J. (1988), “A biomechanical model for flexion torques of human arm muscles as a function of elbow angle”, J. Biomechanics, 21, 183-190
Veeger, H. E. J., Yu, B., An, K. N., Rozendal, R. H., (1996) “Parameters for modeling the upper extremeity”, J. Biomechanics, 30, 6, 1997

132
Wickens, C. D., Baker, P. (1995) “Cognative Issues in Virtual Reality”. Virtual Environments and Advanced Interface Design (ed. W. Barfield and T.A. Furness III), Oxford University Press. 514-541
Winters, J. M., Klewendo, D. G. (1993) “Effect of initial upper-limb alignment on muscle contributions to isometric strength curves”, J. Biomechanics, 26, 143-153

133
CHAPTER 1: INTRODUCTION ........................................................................................1 1.1 Overview .....................................................................................................1 1.2 Past Work ....................................................................................................1 1.3 Objectives ...................................................................................................3 1.4 Conclusion ..................................................................................................4
CHAPTER 2: TERMINOLOGY, METHODS AND MATHEMATICS............................5 2.1 Nomenclature ..............................................................................................5 2.2 Medical Terminology .................................................................................5 2.3 Terminology ...............................................................................................7 2.4 Optimization ...............................................................................................8 2.5 Conclusion ..................................................................................................9
CHAPTER 3: PROBLEM FORMULATION ...................................................................10 3.1 Introduction ...............................................................................................10 3.2 Torque – Force Relationship ....................................................................10 3.3 Applying the Torque-Force Relationship to the Body .............................12
3.3.1 Musculoskeletal System .................................................................13 3.3.2 Mechanical System .........................................................................13
3.4 Optimization .............................................................................................16 3.4.1 Optimization Example ....................................................................18
3.5 Proposed Formulation ...............................................................................21 3.6 Model Requirements .................................................................................22
CHAPTER 4: MODELING ...............................................................................................23 4.1 Introduction ...............................................................................................23 4.2 Anatomy ...................................................................................................23 4.3 Digital Representation of the Arm ............................................................29
4.3.1 Kinematic Model ............................................................................31 4.3.2 Attaching the Muscles ....................................................................39
4.4 Conclusion ................................................................................................54
CHAPTER 5: MODELING OF MUSCLE WRAPPING ..................................................55 5.1 Introduction ...............................................................................................55 5.2 Problem Formulation ................................................................................59 5.3 Proposed Solution .....................................................................................60
5.3.1 Wrapping Algorithm for a Sphere ..................................................61 5.3.2 Wrapping Algorithm for a Cylinder ...............................................64 5.3.3 Multiple Obstacle Wrapping ..........................................................70
5.4 Examples ...................................................................................................72 5.4.1 Spherical Wrapping ........................................................................72 5.4.2 Cylindrical Wrapping .....................................................................75 5.4.3 Multiple Obstacle Wrapping ..........................................................78
5.5 Discussion .................................................................................................81 5.6 Conclusions ...............................................................................................82
CHAPTER 6: REAL TIME INTERACTION ...................................................................83 6.1 Introduction ...............................................................................................83 6.2 Software ....................................................................................................83 6.3 Creating User Interaction ..........................................................................86 6.4 Data Feedback ..........................................................................................87

134
6.4.1 Moment Arm Display .....................................................................88 6.4.2 Max Torque Display .......................................................................90 6.4.3 Activation Display ..........................................................................92
6.5 Conclusion ................................................................................................93
CHAPTER 7: RESULTS AND DISCUSSION .................................................................94 7.1 Introduction ...............................................................................................94 7.2 Lower Arm ................................................................................................95 7.3 Pectoral Girdle ........................................................................................113 7.4 Comparison with Experimental Data ......................................................123 7.5 Conclusions .............................................................................................125
CHAPTER 8: CONCLUSIONS AND FUTURE WORK ...............................................126 8.1 Conclusions .............................................................................................126 8.2 Future Work ............................................................................................127
CHAPTER 9: REFERENCES .........................................................................................129

135
Figure 2.1: Primary planes of the body used for spatial description ...................................6
Figure 2.2: Notation describing anatomical movement .......................................................7
Figure 3.1: Torque calculation ...........................................................................................10
Figure 3.2: Example of the force-torque relationship ........................................................11
Figure 3.3: Example of multiple forces creating torque ....................................................11
Figure 3.4: Major muscles of the upper arm ......................................................................12
Figure 3.5: Medial bicep brachii ........................................................................................13
Figure 3.6: Force from bicep .............................................................................................14
Figure 3.7: Muscle force components ................................................................................14
Figure 3.8: Effect of joint angle. Note the shortening if the stabilizing component and the lengthening of the rotational component as the elbow is flexed ..................15
Figure 3.9: Three muscles acting on the lower arm ...........................................................16
Figure 4.1: Axial skeleton (left) and appendicular skeleton (right) ...................................23
Figure 4.2: Example of muscles attaching to the bones .....................................................24
Figure 4.3: Bones of the right arm .....................................................................................25
Figure 4.4: Muscles of the shoulder ...................................................................................26
Figure 4.5: Muscles of the shoulder and arm .....................................................................27
Figure 4.6: Muscles of the shoulder and arm .....................................................................28
Figure 4.7: Muscles of the shoulder and arm .....................................................................29
Figure 4.8: Muscles of the arm ..........................................................................................30
Figure 4.9: Hierarchy of the bones in the arm ...................................................................31
Figure 4.10: Joints of the arm ............................................................................................32
Figure 4.11: Guide points on the scapula...........................................................................33
Figure 4.12: Vector used to rotate the scapula ...................................................................34
Figure 4.13: Heirarchy of joint frames in a 3DOF joint ....................................................35
Figure 4.14: Euler rotation order for a 3DOF joint. Note that all the frames are separated just for clarity. In the model they coincide. ..............................................35

136
Figure 4.15: Sterno-clavicular reference (left) and local frame (right) .............................37
Figure 4.16: Acromio-clavicular reference (left) and local frame (right) ..........................37
Figure 4.17: Gleno-humeral reference (left) and local frame (right) .................................38
Figure 4.18: Ulno-humeral reference and local frame .......................................................38
Figure 4.19: Ulno-radial reference and local frame ...........................................................39
Figure 4.20: Effects of muscle wrapping as applied to the biceps .....................................40
Figure 4.21: Trapezius and its action lines ........................................................................41
Figure 4.22: Levator scapulae muscle and action line .......................................................42
Figure 4.23: Trapezius muscle, action lines and wrapping obstacles ................................42
Figure 4.24: Rhoboids muscles, action lines and wrapping obstacle ................................43
Figure 4.25: Serratus anterior muscles, action lines and wrapping obstacles ....................44
Figure 4.26: Pectoralis minor muscle, action lines and wrapping obstacle .......................44
Figure 4.27: Pectoralis major muscle, action lines and wrapping obstacles ......................45
Figure 4.28: Coracobrachialis muscle, action line and wrapping obstacle ........................45
Figure 4.29: Supraspinatus muscle, action line and wrapping obstacle ............................46
Figure 4.30: Deltoideus muscle, action lines and wrapping obstacles ..............................46
Figure 4.31: Infraspinatus muscle, action line and wrapping obstacle ..............................47
Figure 4.32: Subacapularis muscle, action line and wrapping obstacle ............................47
Figure 4.33: Teres Minor muscle, action line and wrapping obstacles .............................48
Figure 4.34: Teres Major muscle, action line and wrapping obstacles ..............................48
Figure 4.35: Latissimus dorsi muscle, action lines and wrapping obstacles .....................49
Figure 4.36: Bicep brachii muscles, action lines and wrapping obstacles .........................49
Figure 4.37: Triceps major muscles, action lines and wrapping obstacle .........................50
Figure 4.38: Brachialis muscle, action line and wrapping obstacles .................................51
Figure 4.39: Brachioradialis muscle, action line and wrapping obstacles .........................51
Figure 4.40: Pronator teres muscle, action line and wrapping obstacles ...........................52
Figure 4.41: Supinator muscle, action lines and wrapping obstacles ................................52

137
Figure 4.42: Anconeus muscle, action line and wrapping obstacle ...................................53
Figure 4.43: All modeled action lines ................................................................................54
Figure 5.1: Attachment of the long head of the bicep ........................................................55
Figure 5.2: Straight line model for the short head of the bicep .........................................56
Figure 5.3: Bicep action line intersecting with the humerus .............................................57
Figure 5.4: Triceps action lines with fixed via points about the elbow .............................58
Figure 5.5: Lower action line of the trapezius with fixed via points on the medial edge of the scapula ....................................................................................................59
Figure 5.6: Example of wrapping about a sphere ..............................................................60
Figure 5.7: Wrapping about a sphere in the sphere’s x-y plane which also represents the AL plane ............................................................................................62
Figure 5.8: Wrapping about a cylinder ..............................................................................65
Figure 5.9: Wrapping about a cylinder in the cylinder's x-y plane ....................................66
Figure 5.10: Difference between wrapping if negative or a positive cross product is allowed ......................................................................................................................68
Figure 5.11: Wrapped line viewed in u-v coordinates .......................................................68
Figure 5.12: Example of wrapping around two objects .....................................................71
Figure 5.13: Logic for spherical wrapping example ..........................................................72
Figure 5.14: Sphere wrapping example .............................................................................73
Figure 5.15: Sphere wrapping example .............................................................................74
Figure 5.16: Sphere wrapping example .............................................................................74
Figure 5.17: Sphere wrapping example .............................................................................75
Figure 5.18: Logic for cylinder wrapping example ...........................................................75
Figure 5.19: Cylinder wrapping example ..........................................................................76
Figure 5.20: Cylinder wrapping example ..........................................................................77
Figure 5.21: Cylinder wrapping example ..........................................................................77
Figure 5.22: Cylinder wrapping example ..........................................................................78
Figure 5.23: Setup for multiple obstacle wrapping example .............................................78
Figure 5.24: Logic for multiple obstacle wrapping ...........................................................79
138
Figure 5.25: Multiple object wrapping example ................................................................80
Figure 5.26: Multiple object wrapping example ................................................................80
Figure 5.27: Sphere moved while simulation is paused to determine how long the solution takes to converge.........................................................................................81
Figure 6.1: Interaction between programs .........................................................................85
Figure 6.2: Joint torque user interface. For the joints with more than 1DOF the sliders are arranged such that the top slider is torque about x, middle slider is torque about y and the bottom slider is torque about z. ............................................87
Figure 6.3: Moment Arms of muscles crossing the sterno-clavicular joint .......................88
Figure 6.4: Moment Arms of muscles crossing the acromio-clavicular joint (left) and the gleno-humeral joint (right) ...........................................................................89
Figure 6.5: Moment arms of muscles crossing the ulno-humeral joint (left) and the ulno-radial joint (right) .............................................................................................90
Figure 6.6: Max torque of muscles crossing the sterno-clavicular joint ............................91
Figure 6.7: Max torque of muscles crossing the acromio-clavicular joint (left) and the gleno-humeral joint (right) ..................................................................................91
Figure 6.8: Max torque of muscles crossing the ulno-humeral joint (left) and the ulno-radial joint (right) .............................................................................................92
Figure 6.9: Predicted activation levels ...............................................................................93
Figure 7.1: Max muscle stress (kPa) and PCSA (cm2) data used in the examples ............94
Figure 7.2: Action lines for the lower arm .........................................................................95
Figure 7.3: Action lines wrapping around the elbow. From left to right: elbow fully extended with hand supinated, elbow halfway flexed with hand supinated, elbow fully flexed with hand pronated .....................................................................96
Figure 7.4: Example 1; Hand is neutral and the elbow if fully extended. The charts show the moment arms and max torque about each joint for all 11 action lines of the lower arm ........................................................................................................97
Figure 7.5: Predicted muscle activation for various torques..............................................98
Figure 7.6: Example 2; Hand is neutral and the elbow if fully flexed. The charts show the max torque about each joint for all 11 action lines of the lower arm ......101
Figure 7.7: Predicted muscle activation for various torques............................................103
Figure 7.8: Predicted muscle activation levels for the muscles of the lower arm with a desired torque of 23.1 Nm about the UH joint and 2 Nm about the UR joint .....103

139
Figure 7.9: Predicted muscle activation levels for the muscles of the lower arm with a desired torque of 36.7 Nm about the UH joint and 2.5 Nm about the UR joint .........................................................................................................................105
Figure 7.10: Example where the elbow is flexed to the position shown while the hand is neutral. The graphs display the max torque that each action can apply about each joint and the predicted activation level of each muscle for two different torque configurations. ..............................................................................107
Figure 7.11: Example where the elbow is flexed to the postion shown while the hand is pronated. The graphs display the max torque that each action can apply about each joint and the predicted activation level of each muscle for two different torque confuguratons.........................................................................110
Figure 7.12: Example where the elbow is flexed to the postion shown while the hand is spinated. The graphs display the max torque that each action can apply about each joint and the predicted activation level of each muscle for two different torque confuguratons.........................................................................111
Figure 7.13: Action lines of the pectoral girdle ...............................................................113
Figure 7.14: Example of the pectoral girdle. Graphs display max torque about the SC and GH joint ......................................................................................................114
Figure 7.15: Predicted muscle activation to create -30 Nm of torque about the x axis of the SC joint..................................................................................................117
Figure 7.16: Predicted muscle activation to create -15 Nm of torque about the z-axis of the SC joint..................................................................................................118
Figure 7.17:Predicted muscle activation to create -15 Nm of torque about the z-axis of the GH joint ........................................................................................................118
Figure 7.18: Predicted muscle activation to create -15 Nm of torque about the x-axis of the GH joint .................................................................................................119
Figure 7.19: Predicted muscle activation to create 30 Nm of torque about the y-axis of the GH joint ........................................................................................................120
Figure 7.20: Predicted muscle activation for selected torques about the GH and SC joint .........................................................................................................................121
Figure 7.21: Max torque about the SC and GH joint for the arm in the position shown ......................................................................................................................122
Figure 7.22: Max torque about the SC and GH joint for the arm in the position shown ......................................................................................................................123
Figure 7.23: Comparison of our proposed model to previous studies .............................124





























