Embed Size (px)
Citation preview

mMandM ,....,3,2,1
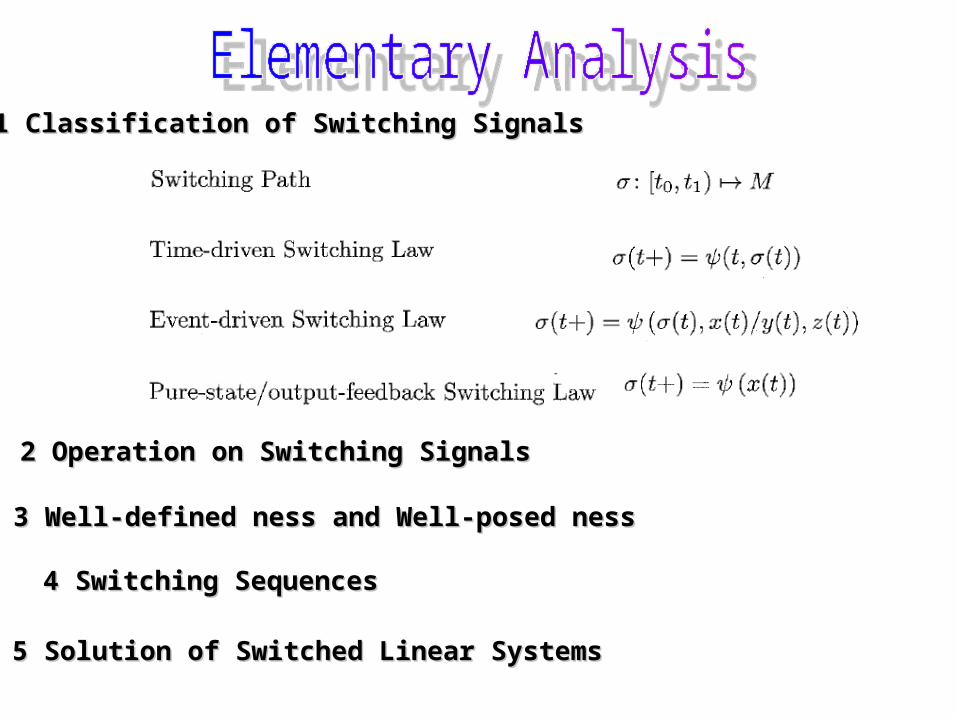
1 Classification of Switching Signals1 Classification of Switching Signals
2 Operation on Switching Signals2 Operation on Switching Signals
3 Well-defined ness and Well-posed ness3 Well-defined ness and Well-posed ness
4 Switching Sequences4 Switching Sequences
5 Solution of Switched Linear Systems5 Solution of Switched Linear Systems
1 Classification of Switching Signals1 Classification of Switching Signals
2 Operation on Switching Signals2 Operation on Switching Signals
3 Well-defined ness and Well-posed ness3 Well-defined ness and Well-posed ness
4 Switching Sequences4 Switching Sequences
5 Solution of Switched Linear Systems5 Solution of Switched Linear Systems
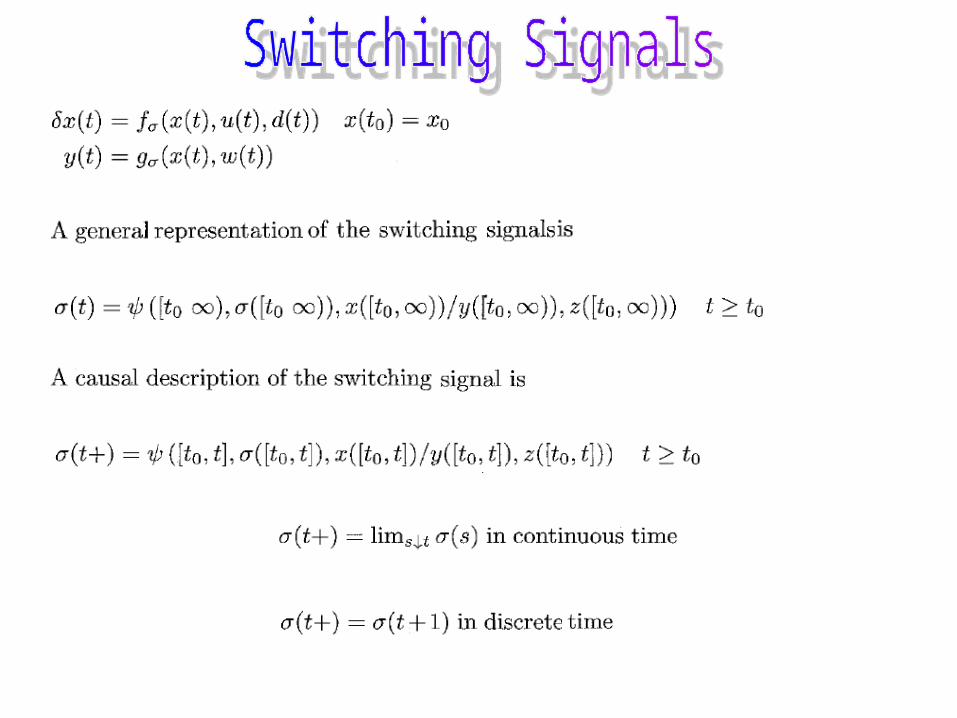
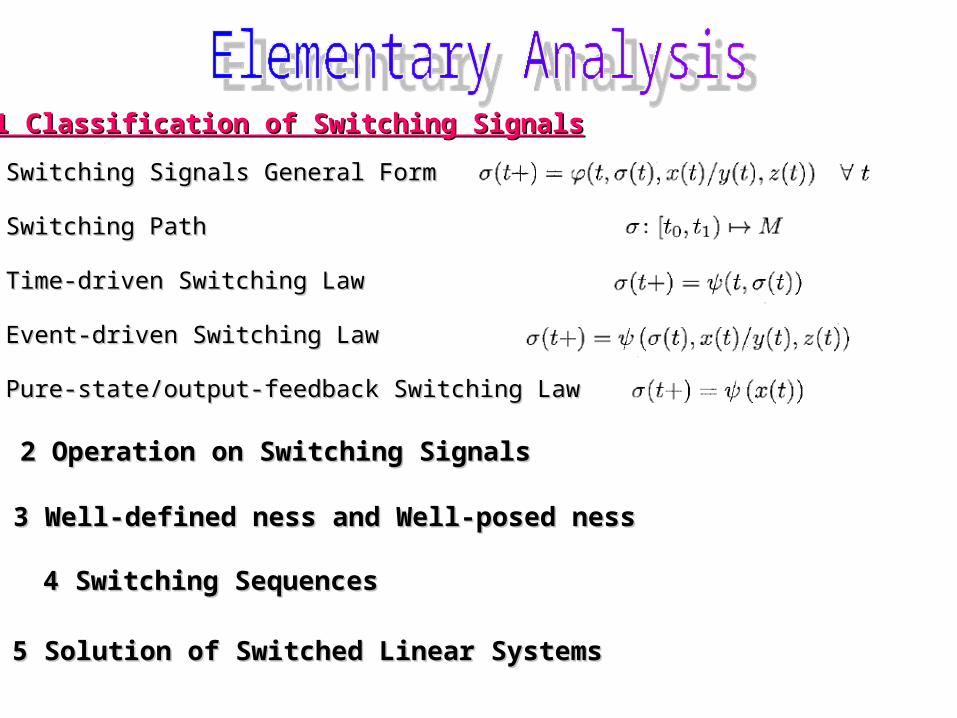
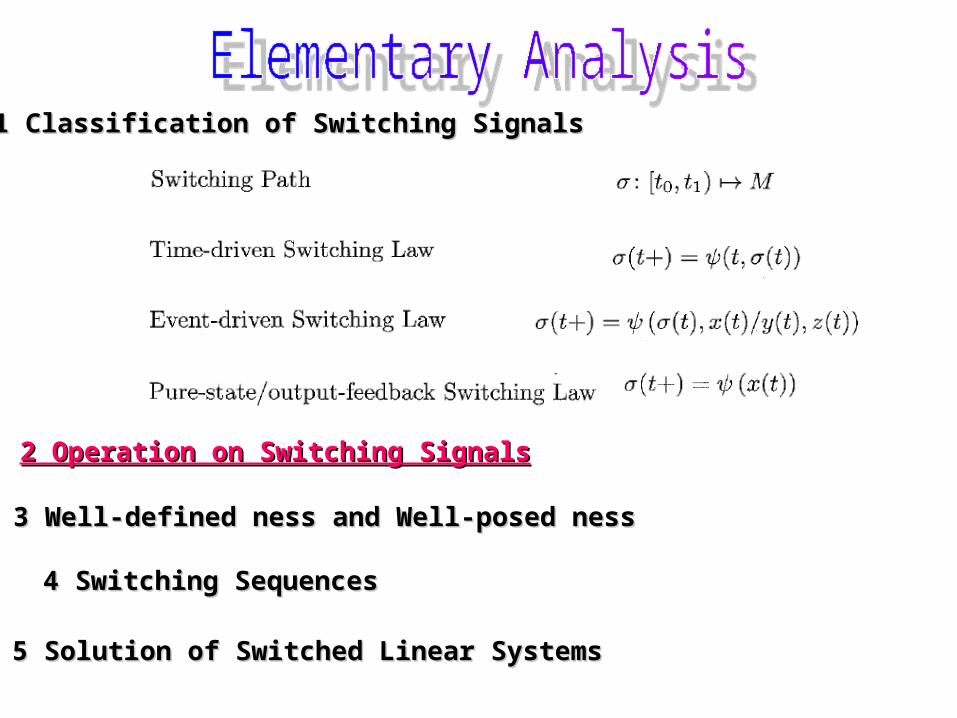
Switching Signals General FormSwitching Signals General Form
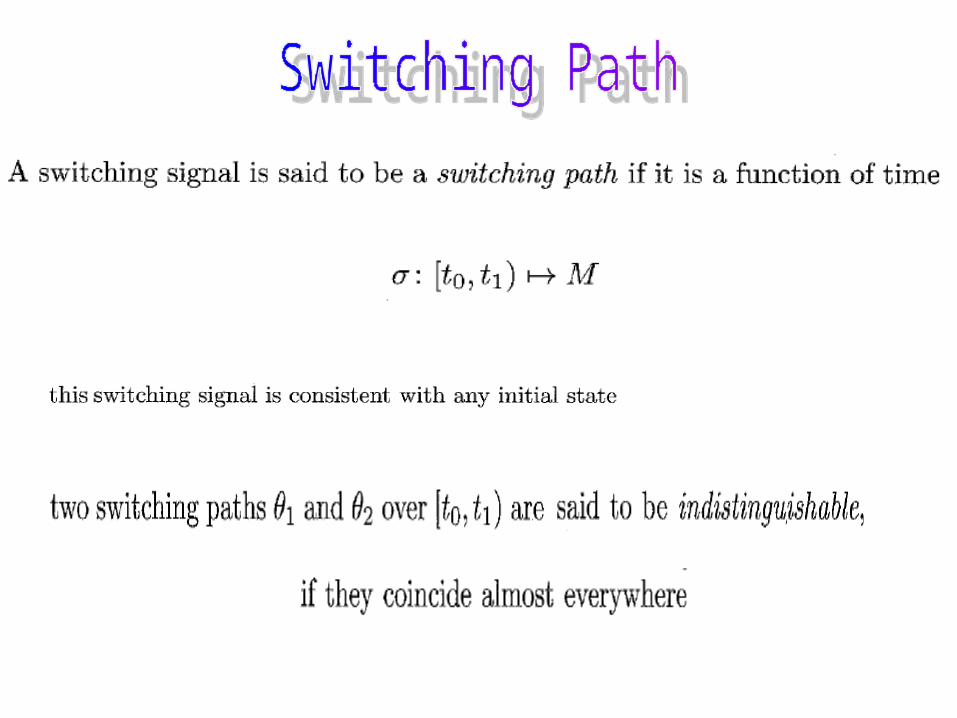
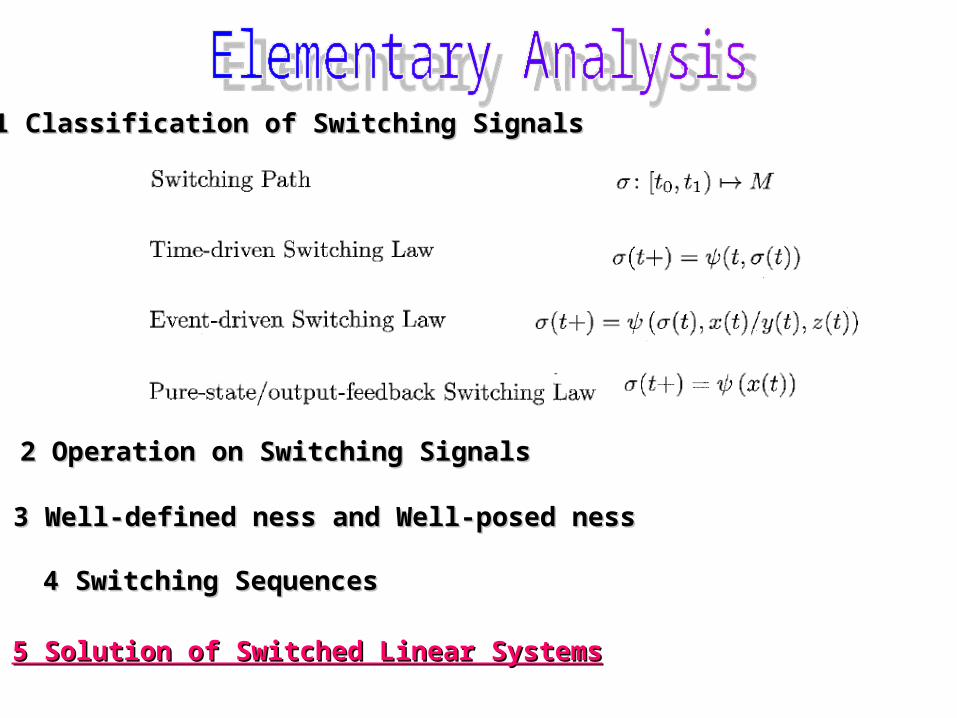
Switching PathSwitching Path
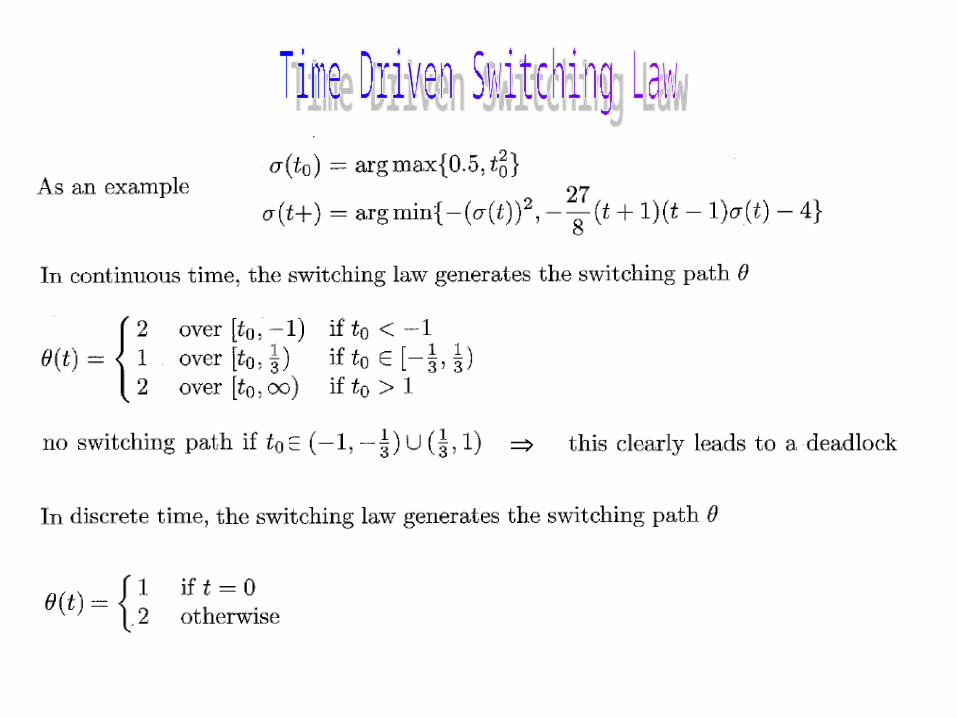
Time-driven Switching LawTime-driven Switching Law
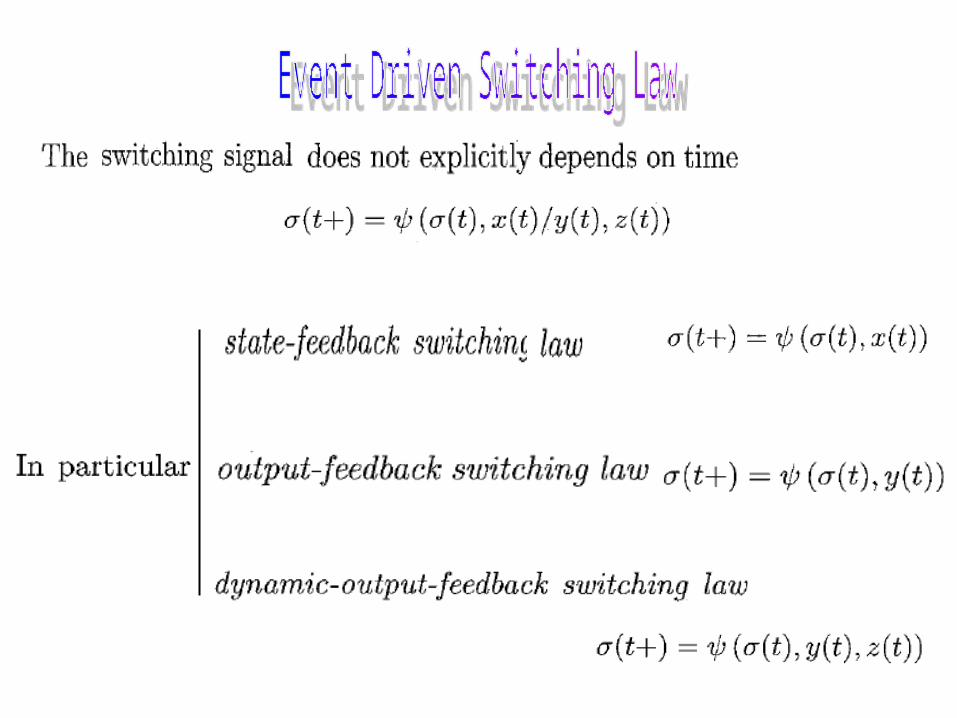
Event-driven Switching LawEvent-driven Switching Law
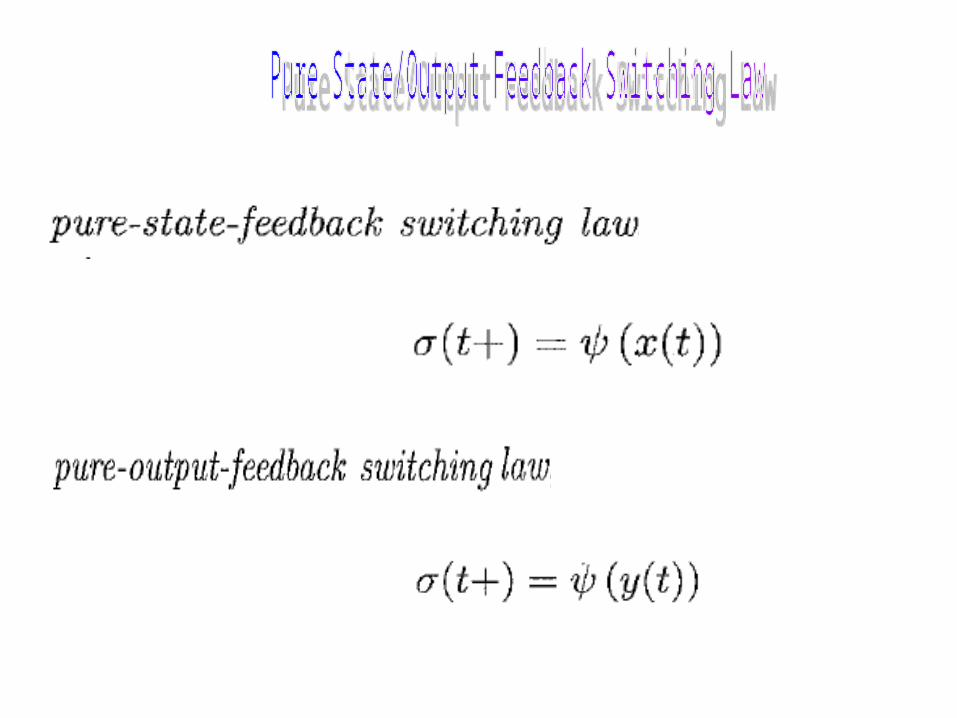
Pure-state/output-feedback Switching LawPure-state/output-feedback Switching Law


1 Classification of Switching Signals1 Classification of Switching Signals
2 Operation on Switching Signals2 Operation on Switching Signals
3 Well-defined ness and Well-posed ness3 Well-defined ness and Well-posed ness
4 Switching Sequences4 Switching Sequences
5 Solution of Switched Linear Systems5 Solution of Switched Linear Systems

Different Relation Between to Switching SignalsDifferent Relation Between to Switching Signals
11 Time TransitionTime Transition 22 Radial TransitionRadial Transition
33 Transition InvariantTransition Invariant
44 Sub PathSub Path 55 Concatenation Concatenation
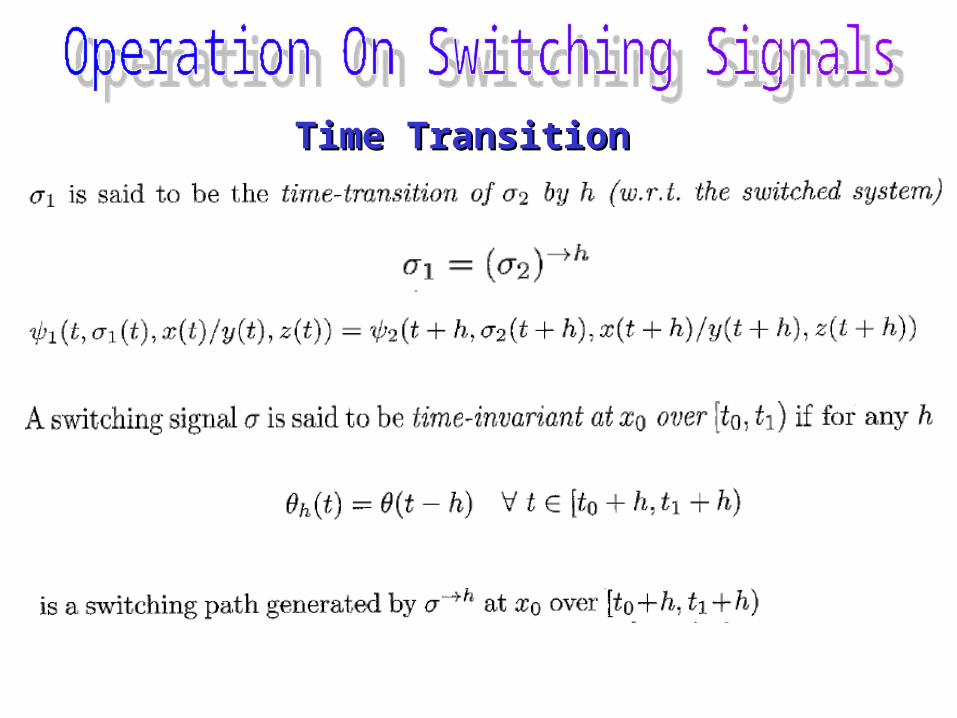
Time TransitionTime Transition

Time TransitionTime Transition
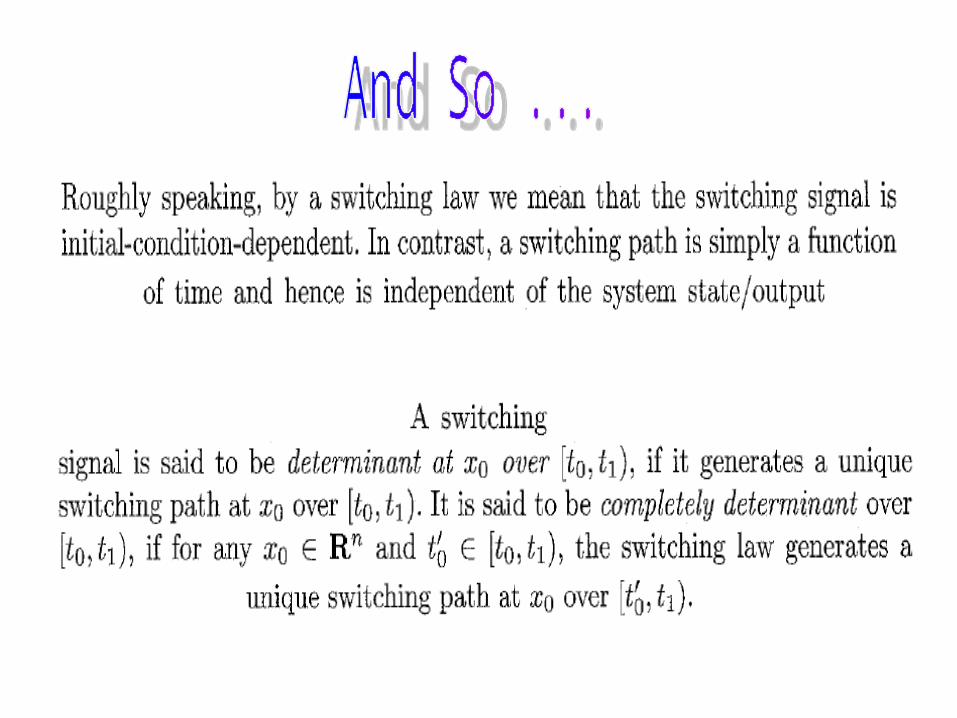
The Switching Signal is said to beThe Switching Signal is said to be
time-invariant over [ttime-invariant over [t00,t,t11) if it is time invariant at each) if it is time invariant at each
state in Rstate in Rnn [t0,t1) [t0,t1)
The Switching Signal is said to beThe Switching Signal is said to be
completely time-invariant over any time intervalcompletely time-invariant over any time interval
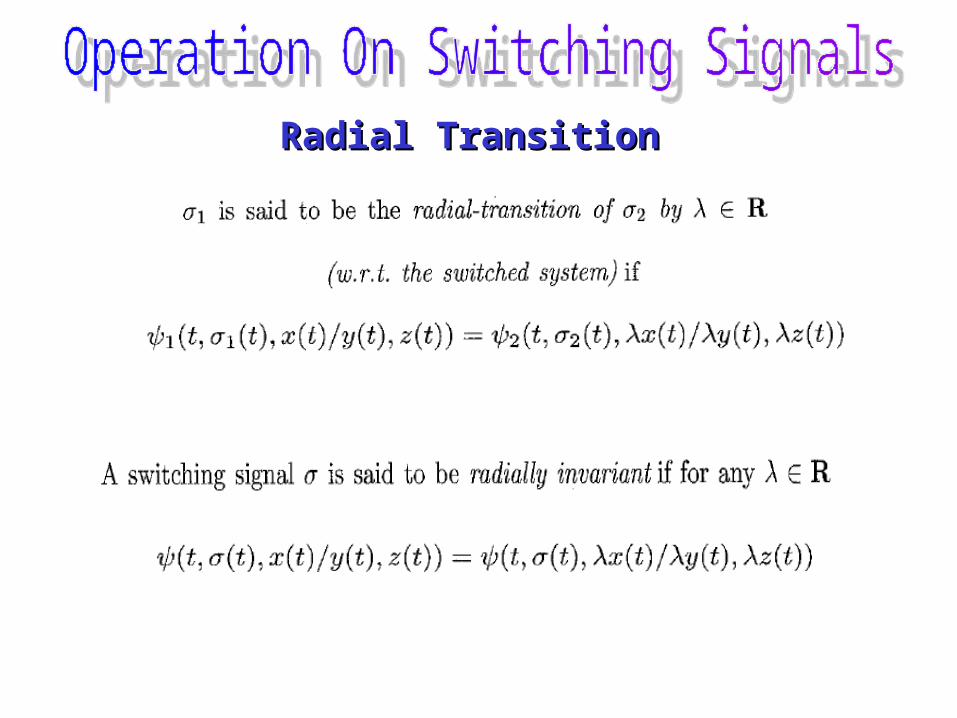
Radial TransitionRadial Transition

Radial TransitionRadial Transition
ExampleExample
Any switching path is radial transitionAny switching path is radial transition
Any time driven switching law is radial transitionAny time driven switching law is radial transition
Event driven switching signal may not be radial transition Event driven switching signal may not be radial transition
Is not radial transition in general Is not radial transition in general
Transition InvariantTransition Invariant
Transition Invariant = Transition Invariant = Time Transition + Radial TransitionTime Transition + Radial Transition
Sub PathSub Path
Consider
θ1: [ t1, s1) M
θ2: [ t2, s2) M
θ2 is said to be a sub-path of θ1 on [ t2, s2) denoted by
θ2 = θ1[t2,s2) if
[ t1, s1) [ t2, s2)
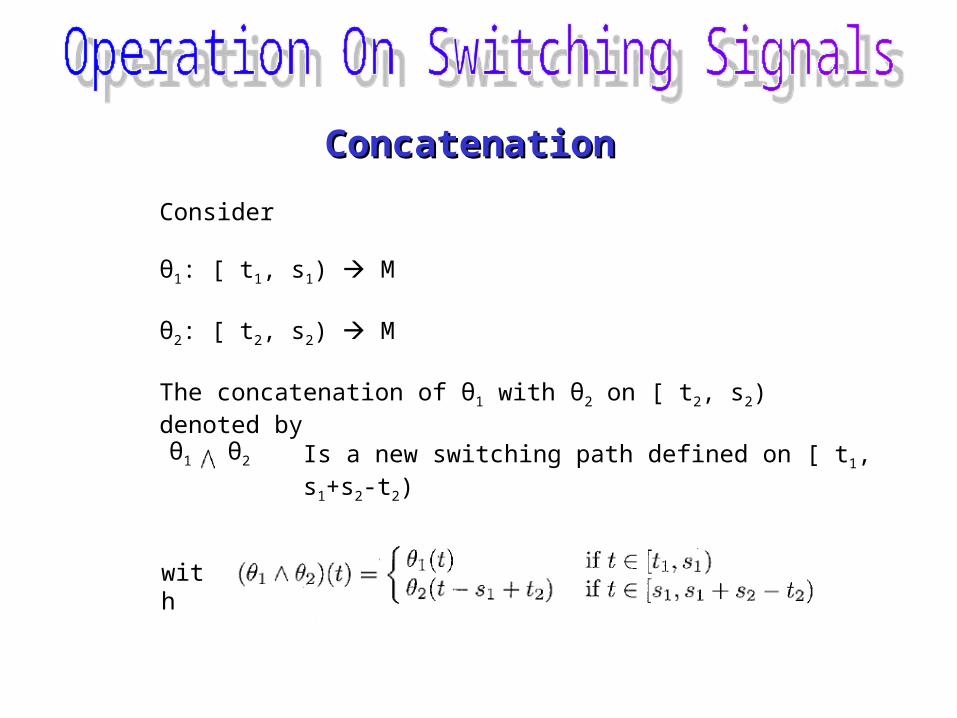
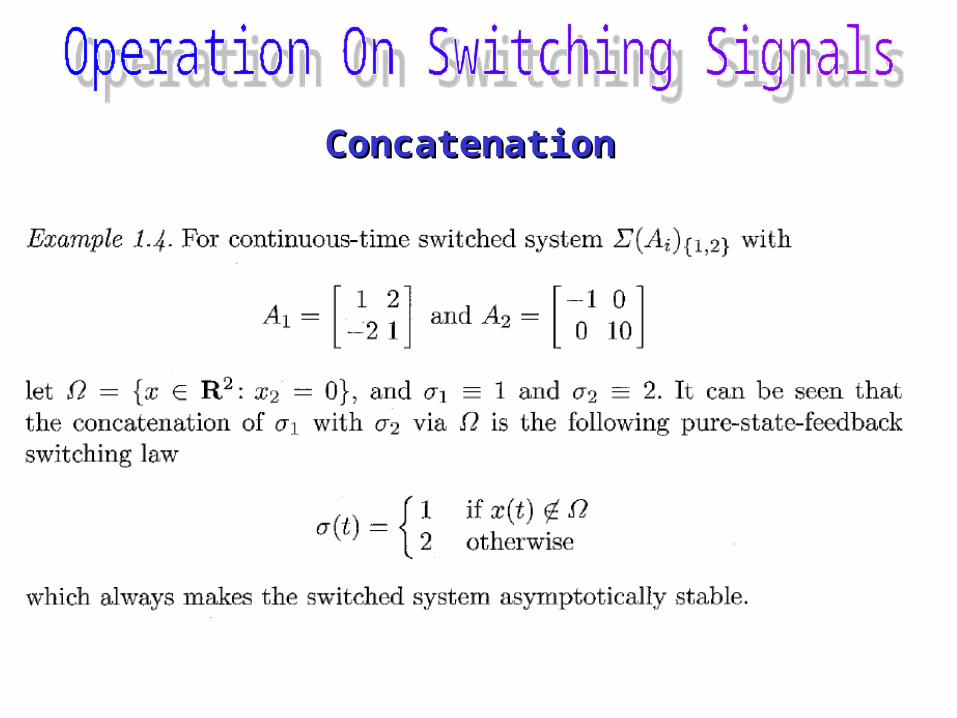
Concatenation Concatenation
Consider
θ1: [ t1, s1) M
θ2: [ t2, s2) M
The concatenation of θ1 with θ2 on [ t2, s2) denoted by
θ2 θ1 Is a new switching path defined on [ t1, s1+s2-t2)
with
Concatenation Concatenation
Concatenation of two switching signals via a given region suppose
σ1 on [ t1, s1) and σ2 on [ t2, s2) are two switching signals
Then we define the concatenation of σ1 with σ2 at ( x0 ,t1 ,[ t2, s2)) via Ω
If
It generates a unique switching path θ[t1,s1+s2-t2) with
s1 =min { t ≥ t1 : x(t) є Ω }
Concatenation Concatenation

1 Classification of Switching Signals1 Classification of Switching Signals
2 Operation on Switching Signals2 Operation on Switching Signals
3 Well-defined ness and Well-posed ness3 Well-defined ness and Well-posed ness
4 Switching Sequences4 Switching Sequences
5 Solution of Switched Linear Systems5 Solution of Switched Linear Systems
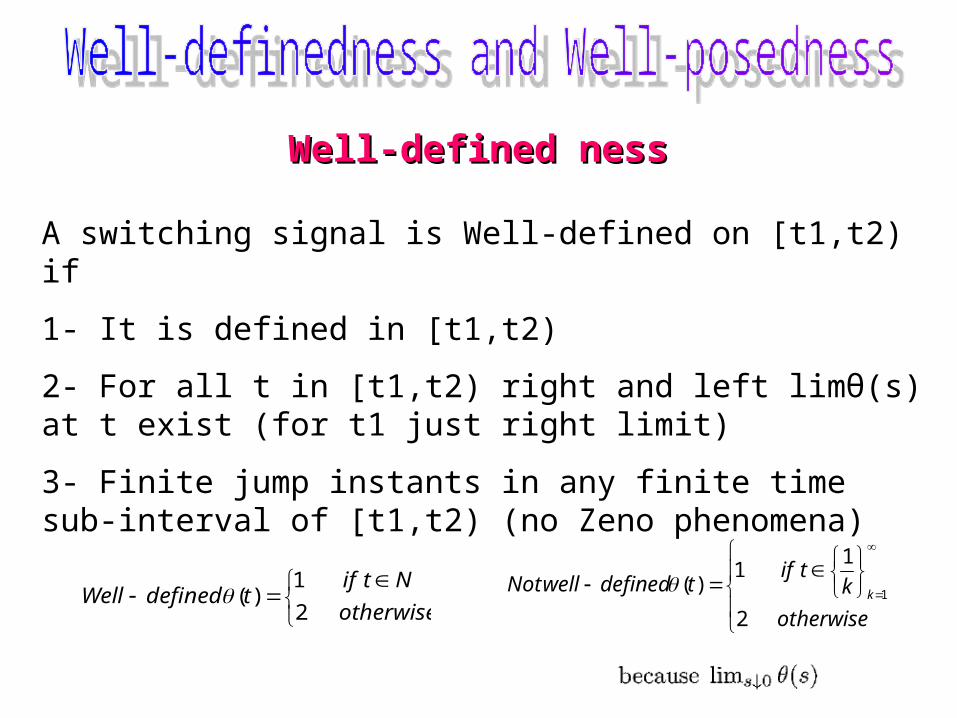
Well-defined nessWell-defined ness
A switching signal is Well-defined on [t1,t2) if
1- It is defined in [t1,t2)
2- For all t in [t1,t2) right and left limθ(s) at t exist (for t1 just right limit)
3- Finite jump instants in any finite time sub-interval of [t1,t2) (no Zeno phenomena)
otherwise
ktif
tdefinedwellNotk
2
11
)(1
otherwise
NtiftdefinedWell
2
1)(

Well-defined nessWell-defined ness

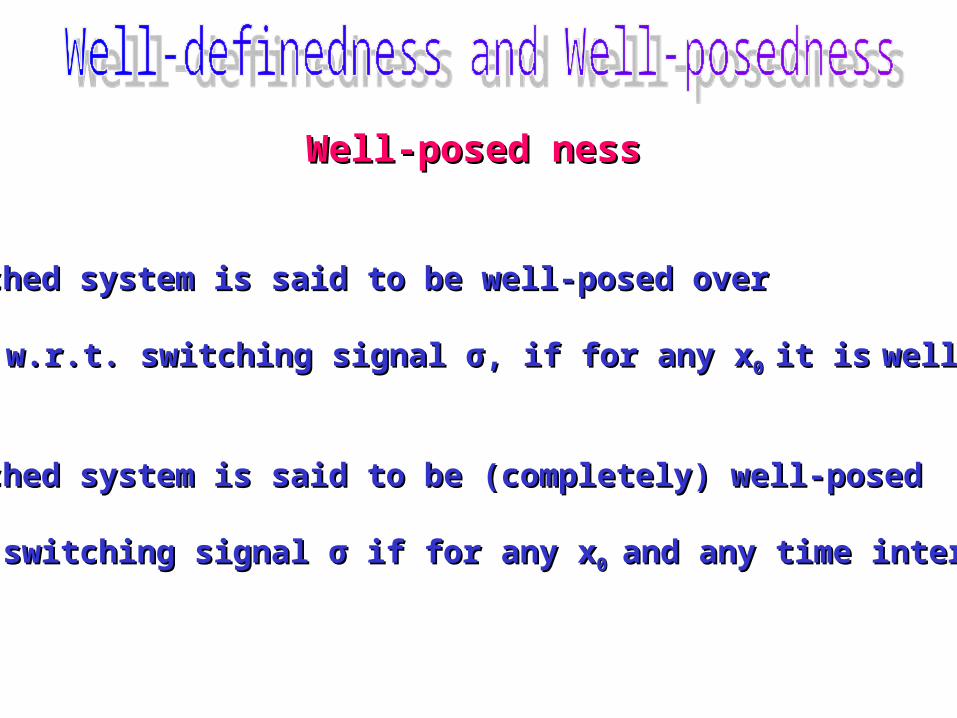
Well-posed nessWell-posed ness
A switched system is said to be well-posed at xA switched system is said to be well-posed at x00 over over
[t[t00,t,t11) w.r.t. switching signal ) w.r.t. switching signal σσ, , if for any given piecewiseif for any given piecewise
continuous and locally integrable input u,continuous and locally integrable input u,
1- The switching signal 1- The switching signal σσ is well-defined at x is well-defined at x00 over [t over [t00,t,t11) )
w.r.t. switching systemw.r.t. switching system
2- The switched system admits a unique solution2- The switched system admits a unique solution
Via the Via the switching signal switching signal x0 over [tx0 over [t00,t,t11))
Well-posed nessWell-posed ness
A switched system is said to be well-posed over A switched system is said to be well-posed over
[t[t00,t,t11) w.r.t. switching signal ) w.r.t. switching signal σσ, if for any x, if for any x0 0 it isit is well-posedwell-posed
A switched system is said to be (completely) well-posed A switched system is said to be (completely) well-posed
w.r.t. switching signal w.r.t. switching signal σσ if for any x if for any x00 and any time intervaland any time interval

1 Classification of Switching Signals1 Classification of Switching Signals
2 Operation on Switching Signals2 Operation on Switching Signals
3 Well-defined ness and Well-posed ness3 Well-defined ness and Well-posed ness
4 Switching Sequences4 Switching Sequences
5 Solution of Switched Linear Systems5 Solution of Switched Linear Systems
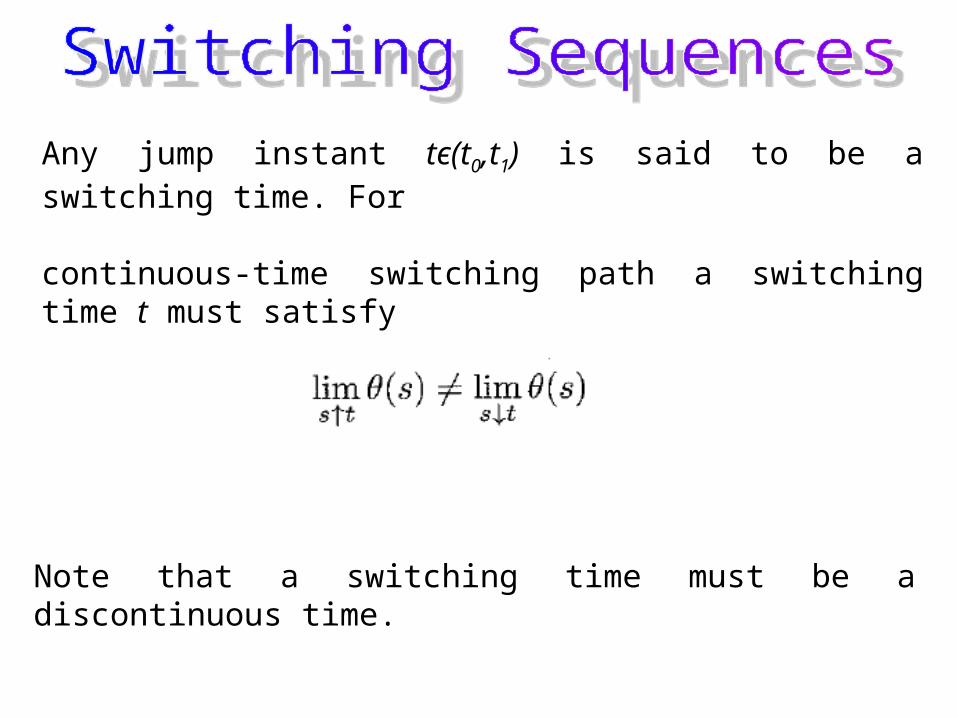
Any jump instant tє(t0,t1) is said to be a switching time. For
continuous-time switching path a switching time t must satisfy
Note that a switching time must be a discontinuous time.
For a well-defined path θ, let s1,s2,…,sl be the ordered switching time in [t0,t1) with
or simply (when the interval time [t0,t1) is clear)
is said to be the switching time sequence over [t0,t1)
of θ and is defined by

For a well-defined path θ, let s1,s2,…,sl be the ordered switching time in [t0,t1) with
or simply (when the interval time [t0,t1) is clear)
is said to be the switching index sequence of θ over [t0,t1)
and is defined by
For a well-defined path θ, let s1,s2,…,sl be the ordered switching time in [t0,t1) with
or simply (when the interval time [t0,t1) is clear)
Is said to be the switching sequence of θ over [t0,t1) and
is defined by
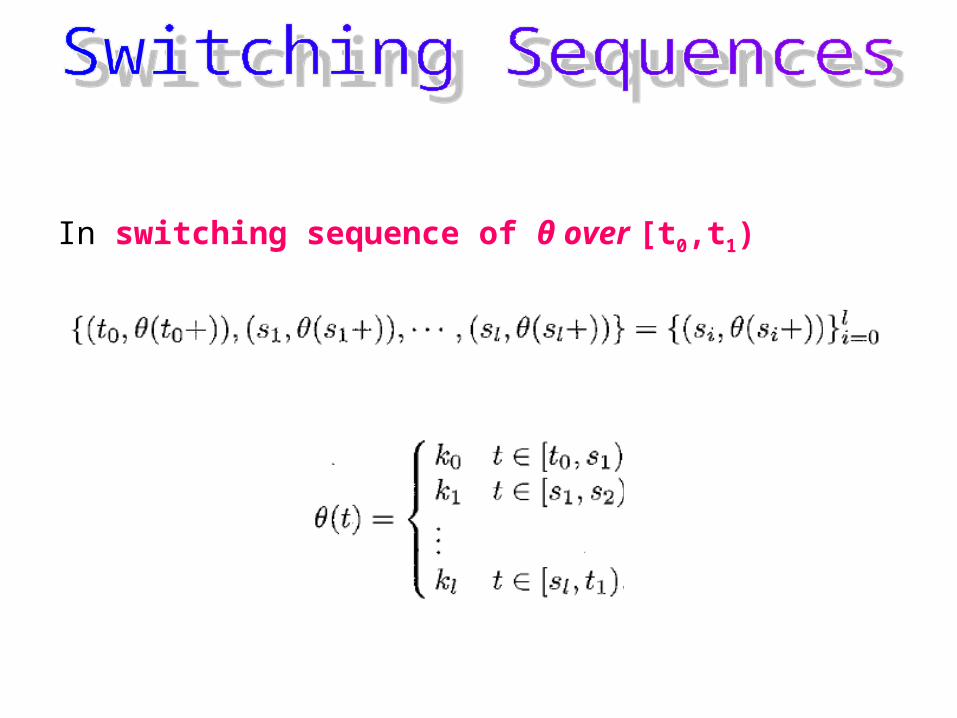
In switching sequence of θ over [t0,t1)
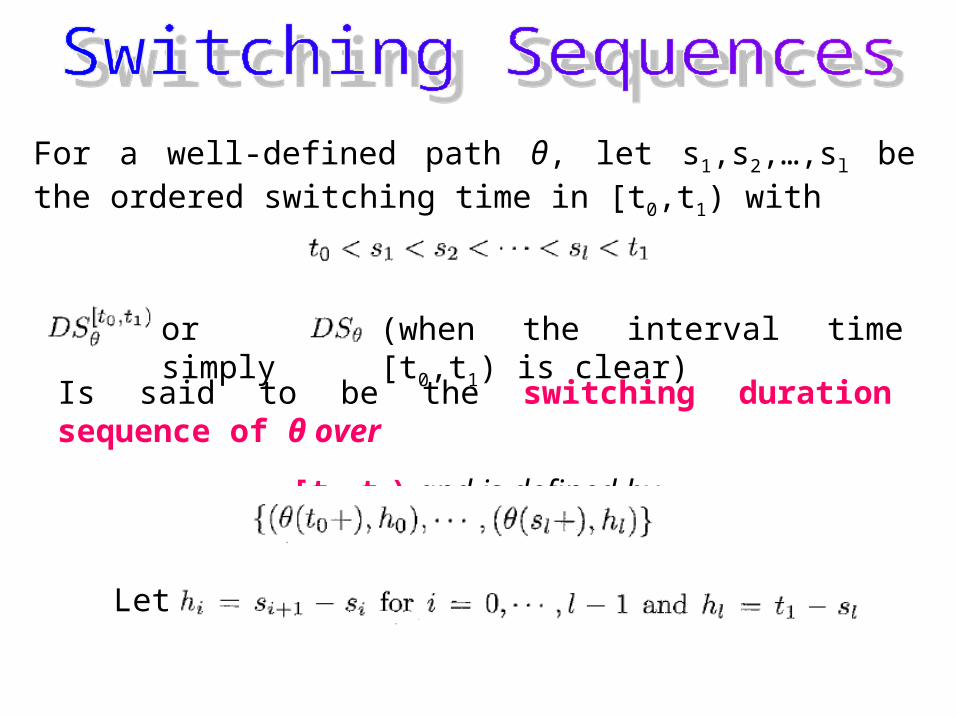
For a well-defined path θ, let s1,s2,…,sl be the ordered switching time in [t0,t1) with
or simply (when the interval time [t0,t1) is clear)
Is said to be the switching duration sequence of θ over
[t0,t1) and is defined by
Let

If the switching path θ generated by a switching signal at
x0 over [t0,t1) then the switching sequence is in the form
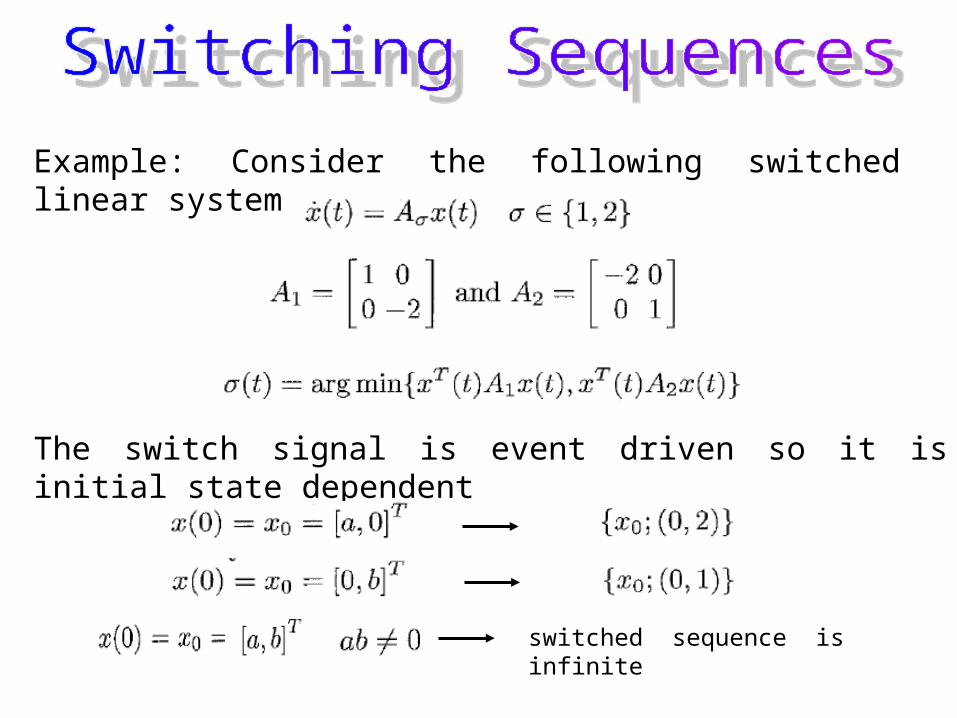
Example: Consider the following switched linear system
The switch signal is event driven so it is initial state dependent
switched sequence is infinite
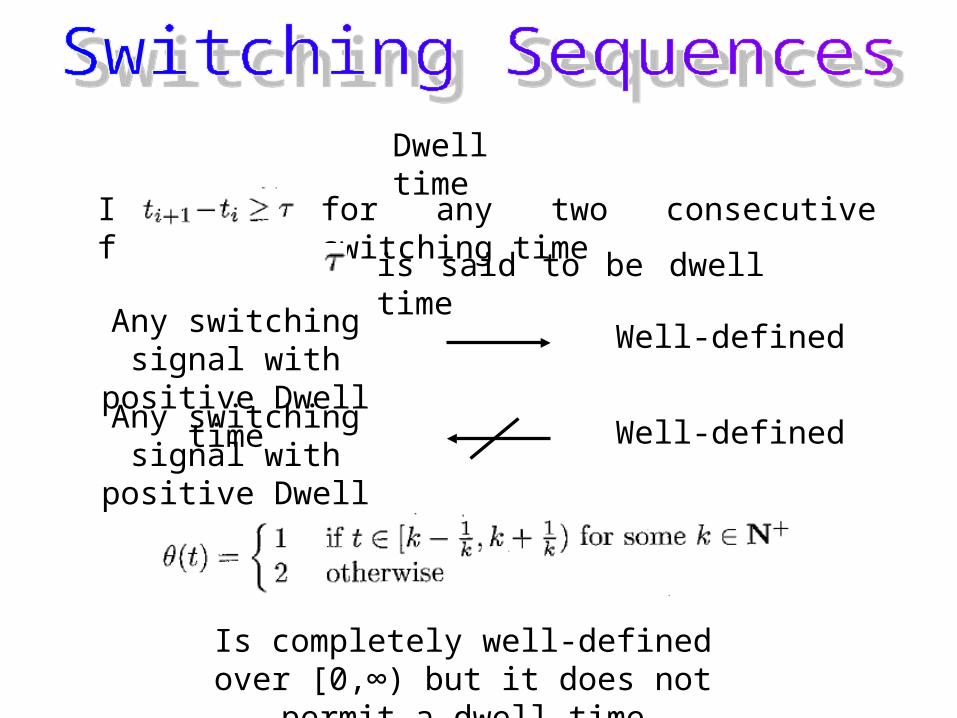
Dwell time
for any two consecutive switching timeIf
is said to be dwell time
Any switching signal with positive Dwell time
Well-defined
Any switching signal with positive Dwell time
Well-defined
Is completely well-defined over [0,∞) but it does not permit a dwell time
1 Classification of Switching Signals1 Classification of Switching Signals
2 Operation on Switching Signals2 Operation on Switching Signals
3 Well-defined ness and Well-posed ness3 Well-defined ness and Well-posed ness
4 Switching Sequences4 Switching Sequences
5 Solution of Switched Linear Systems5 Solution of Switched Linear Systems

Initialized at x(t0)=x0
Suppose the switching signal is well-defined and its switching sequence is
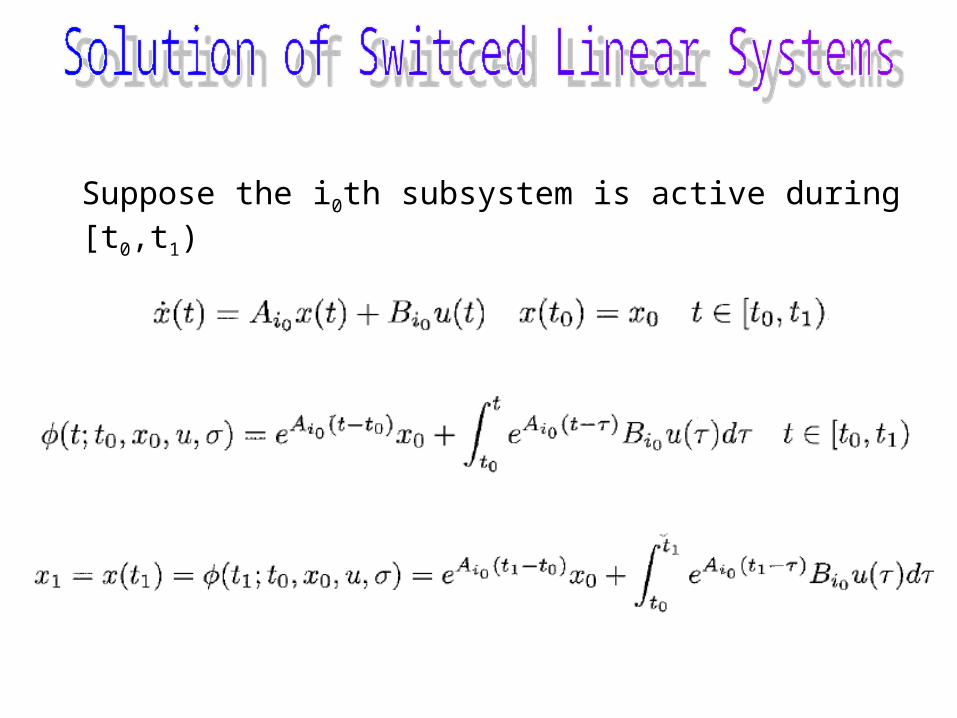
Suppose the i0th subsystem is active during [t0,t1)
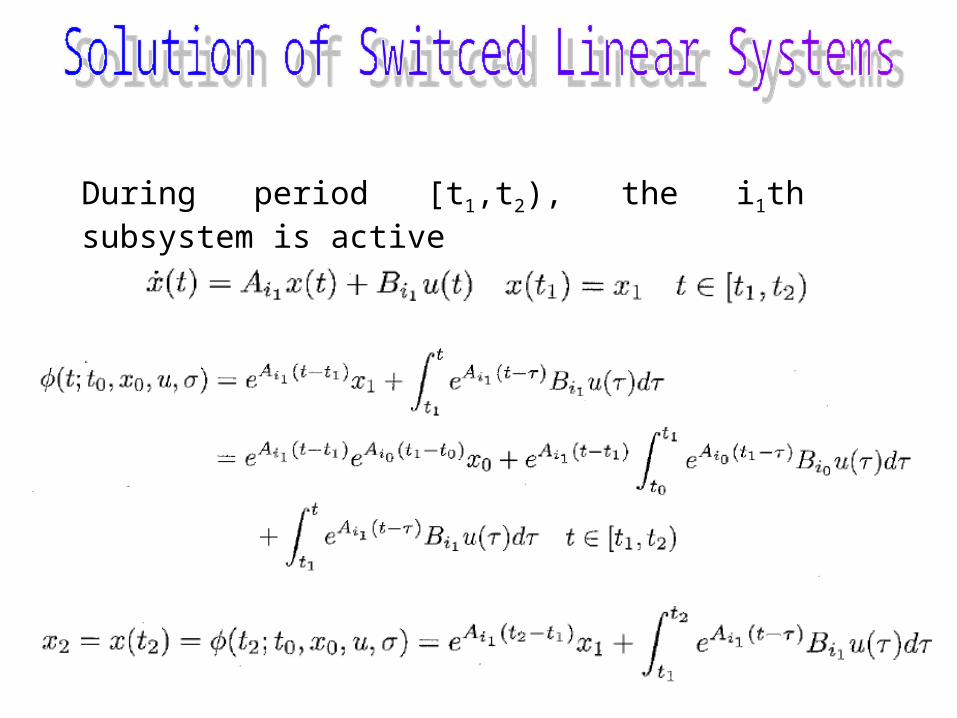
During period [t1,t2), the i1th subsystem is active

General response of system
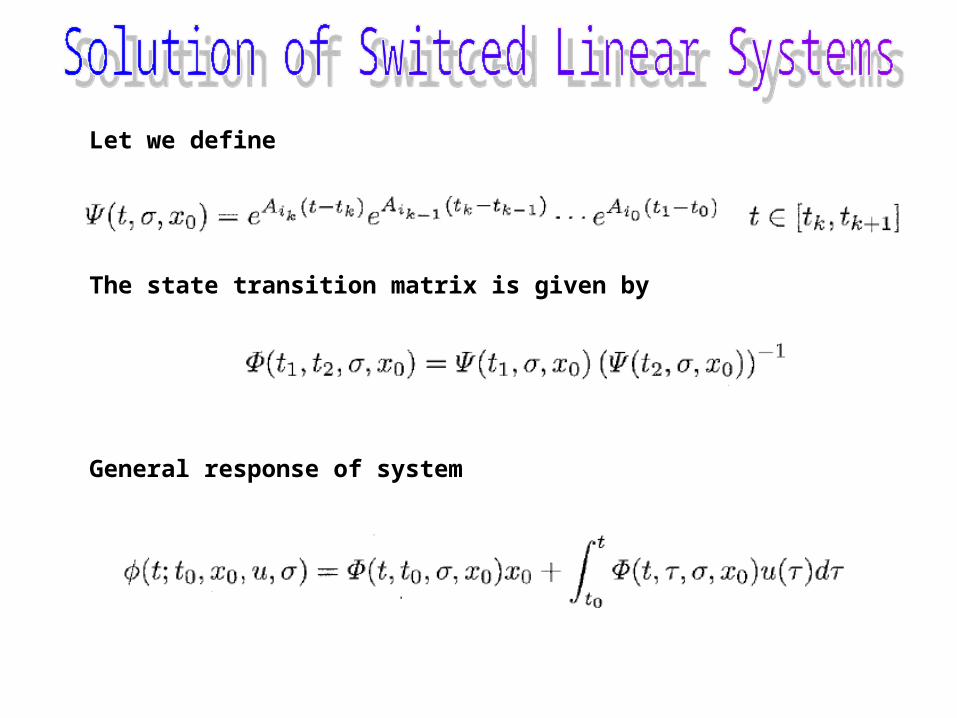
Let we define
The state transition matrix is given by
General response of system
Conclusion
1- For a switched linear system, if the switching signal is well-defined and
the input is globally integrable, then the system always permits a unique
solution for the forward time space.
2- The solution is usually not continuously differentiable at the switching
instants, even if the input is smooth.
3- The state transition matrix is a multiple multiplication of matrix function
of the form eAt . Accordingly, properties of functions in this form play an
important role in the analysis of switched linear systems.
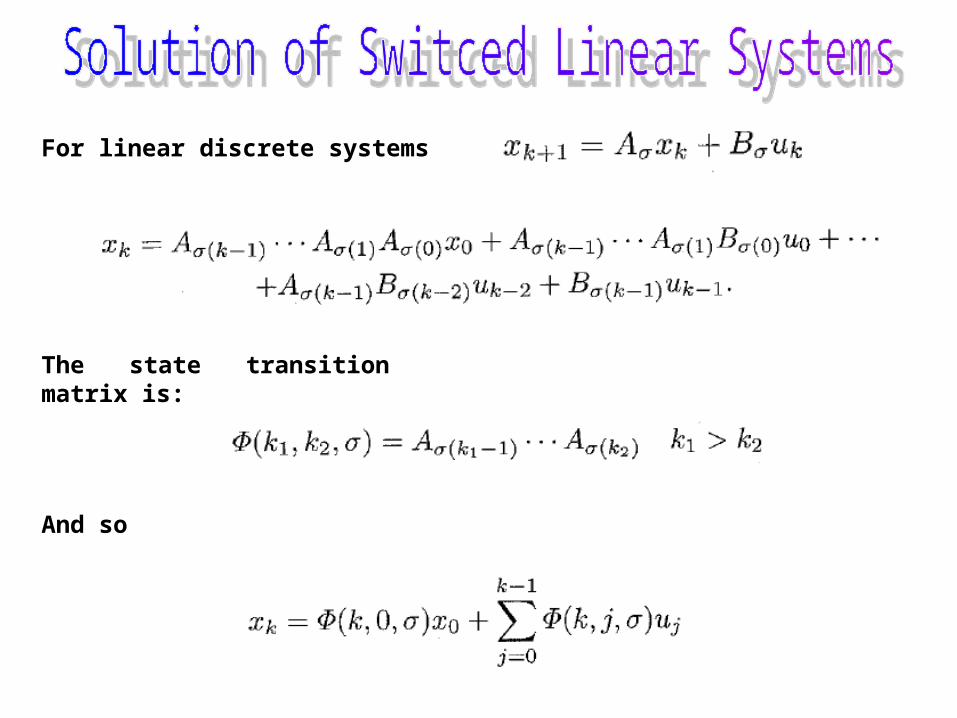
For linear discrete systems
The state transition matrix is:
And so
Conclusion
1- For a switched linear system, the system permits a unique solution for
the forward time space. Hence, any discrete-time switched system is well-
posed.
2- The state transition matrix is a multiple multiplication or matrices.
Accordingly, properties of matrix multiplication play an important role in
analyzing the switched system.
Is the set of inputs which are piece wise continuous over [t0,∞)
Is a well-defined switching path
The set of state attainable from x(t0)=x0 via the switching path θ is
If the switching path is transition invariant by proposition 1.6
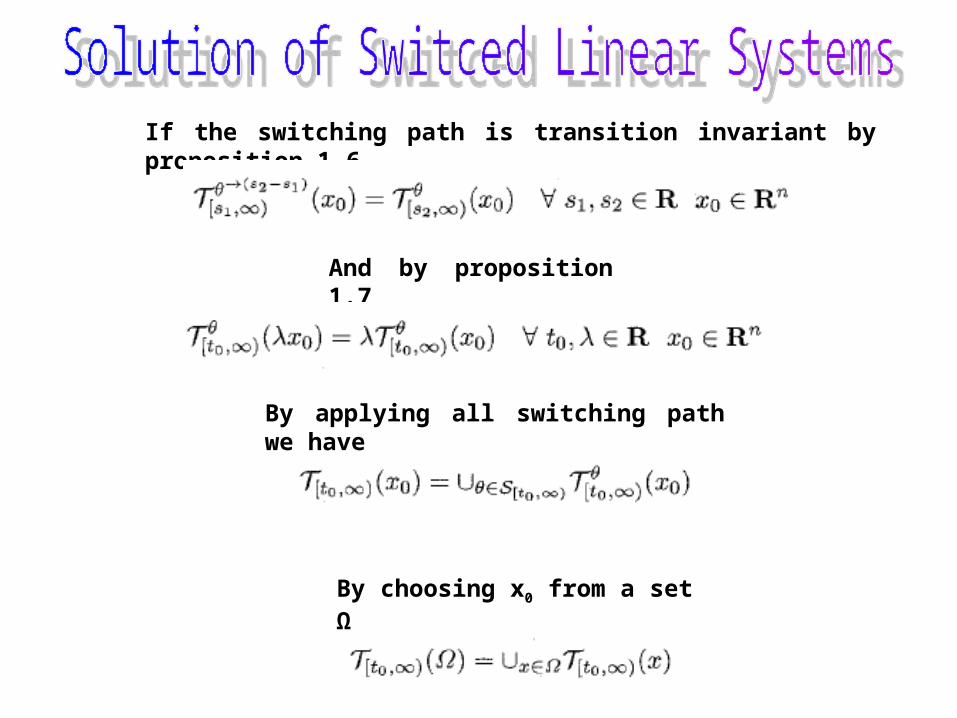
If the switching path is transition invariant by proposition 1.6
And by proposition 1.7
By applying all switching path we have
By choosing x0 from a set Ω
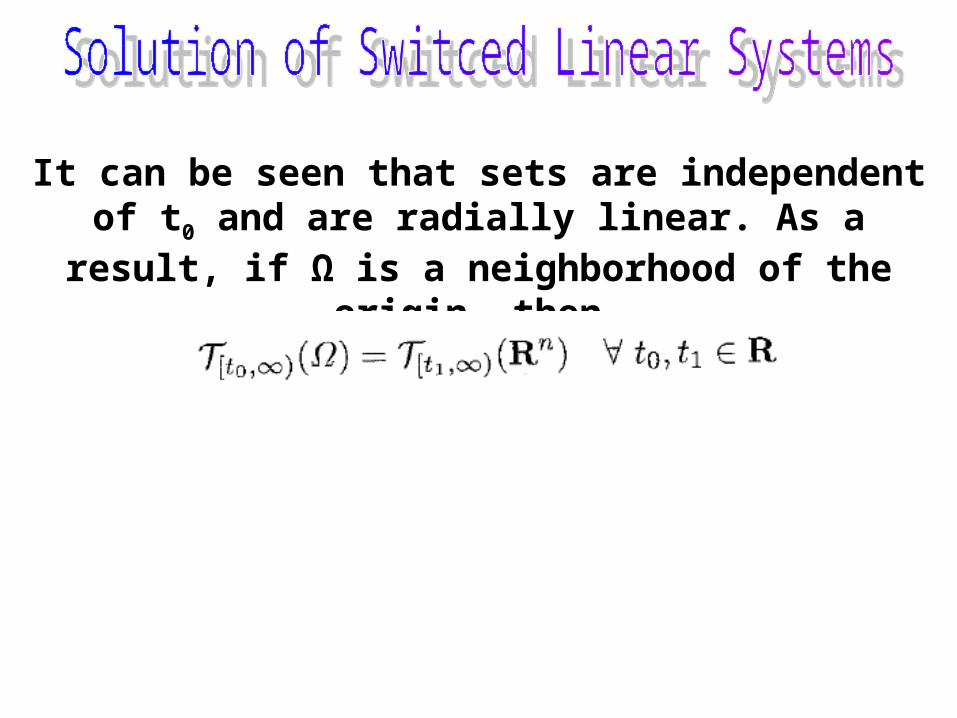
It can be seen that sets are independent of t0 and are radially linear. As a result, if Ω is a
neighborhood of the origin, then

Some fundamental features of linear switched systems are:
i) If the property holds at some t0, then it also holds at any other time
ii) If such a property can be achievable via a well defined switching signal, then it can also be achievable via a well defined switching signal that is transition invariant
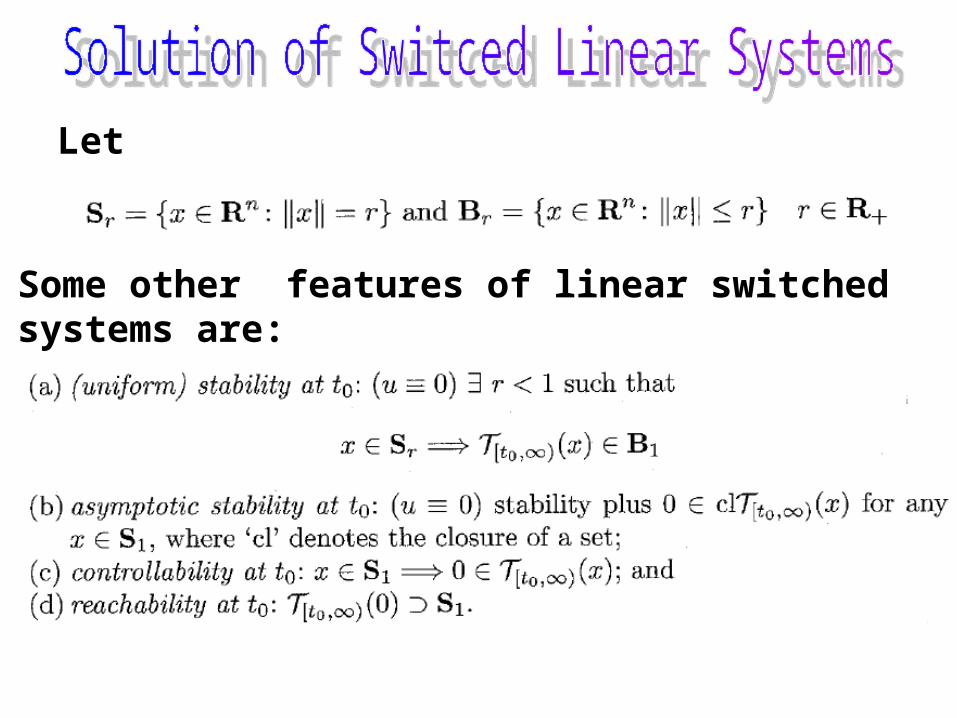
Let
Some other features of linear switched systems are:





























