Embed Size (px)
DESCRIPTION
With the increasing dependence on autonomous operating agents and robots the need for ethical machine behavior rises. This paper presents a moral reasoner that combines connectionism, utilitarianism and ethical theory about moral duties. The moral decision-making matches the analysis of expert ethicists in the health domain. This may be useful in many applications, especially where machines interact with humans in a medical context. Additionally, when connected to a cognitive model of emotional intelligence and affective decision making, it can be explored how moral decision making impacts affective behavior.
Citation preview

Abstract Increasing dependence on autonomous
operating systems calls for ethical machine
behavior. Our moral reasoner combines
connectionism, utilitarianism, and ethical
theory about moral duties. The moral
decision-making matches the analysis of
expert ethicists in the health domain. This is
particularly useful when machines interact
with humans in a medical context. Connected
to a model of emotional intelligence and
affective decision making, we can explore
how moral decision making impacts affective
behavior and vice versa.
Background Rosalind Picard (1997): ‘‘The greater the
freedom of a machine, the more it will need
moral standards.’’
Wallach, Franklin, and Allen (2010) argue
that agents that adhere to a deontological
ethic or that are utilitarians also require
emotional intelligence, a sense of self, and a
theory of mind.
We connected the moral system to Silicon
Coppélia (Hoorn, Pontier, & Siddiqui, 2011), a
model of emotional intelligence and affective
decision making. Silicon Coppélia contains a
feedback loop that learns the preferences of
an individual patient so to personalize its
behavior.
Results
Discussion Sample Exp. 5: A patient with incurable cancer refuses chemotherapy to
live a few months longer, almost without pain, because he is convinced
of being cancer-free. According to Buchanan and Brock (1989), the
ethically preferable answer is to “try again.” The patient seems less than
fully autonomous and his decision leads to harm, denying the chance to
a longer life (a violation of the duty of beneficence). This he might regret
later. Our moral reasoner comes to the same conclusion as the ethical
experts. However, even among doctors, there is no consensus about the
interpretation of values, their ranking and meaning. Van Wynsberghe
(2012) found this depends on: the type of care (i.e., social vs. physical
care), the task (e.g., bathing vs. lifting vs. socializing), the care-givers
and their style, as well as the care-receivers and their specific needs.
Toward machines that behave ethically better than humans do
Matthijs Pontier1, 2
Johan F, Hoorn1 1 VU University, Amsterdam
2 http://camera-vu.nl/matthijs/
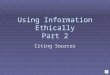
Autonomy
Beneficence
Non-maleficence
Action1
Action2
F
Moral Goals Belief strengths Actions Output
M
ora
l re
asoner