Embed Size (px)
Citation preview

TECHNOLOGY ROBOTICS SOCIETY
Indian Institute of Technology, Kharagpur

A TUTORIAL ON ROBOTICSSensors

Copyright © Robotix Team, IIT Kharagpur
Basic Parts Of Our Mobile Robot Locomotion system Power supply system Actuators Sensory devices for feedback Sensor Data processing unit Control system

Sensors Analogous to human sensory organs
Eyes, ears, nose, tongue, skin Sensors help the robot knowing its
surroundings better Improves its actions and decision making
ability Provides feedback control

LDR - Light Dependent Resistor Made of cadmium
sulphide Resistance between
two terminals vary depending on the intensity of light
Can be used to differentiate contrast colours

LED – Light Emitting Diodes Used generally with LDRs
to make a complete sensor module.
Act as a source of light for the LDRs.
The main specification of LED are its current rating=20mA, typical cut in voltage=2V,voltage is around 4.5V.

Thermistor Manufactured from the oxides of the
transition metals - manganese, cobalt, copper and nickel
Resistor depends on temperature Commonly available temperature
sensors are LM35,DS1621 thermistor.

IR Photo Diode Detects presence of Infra
Red radiations Used for obstacle proximity
sensing IR Data Communication Used in combination with IR
LEDs

Sensor Interfacing
Light Sensing Module using LED-LDR combination

Sensor Interfacing
Bump Detector Module

An Example - Line Follower A line follower is a robot
capable of tracking a line drawn on a surface
Optical sensors capture the line position at the front end of the robot
The robot is steered to keep it always over the line

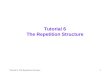
Block Layout of Line FollowerOptical Sensor Array
Steering Controller
Left Motor Right Motor

Line Following AlgorithmStep1:Step1: All the sensors are assigned All the sensors are assigned some weight such assome weight such as
Sensor 1 = a1 = 3Sensor 1 = a1 = 3Sensor 2 = a2 = 2Sensor 2 = a2 = 2Sensor 3 = a3 = 1Sensor 3 = a3 = 1Sensor 4 = a4 = -1Sensor 4 = a4 = -1Sensor 5 = a5 = -2Sensor 5 = a5 = -2Sensor 6 = a6 = -3Sensor 6 = a6 = -3
Step2:Step2:Let b1 – b6 denote the state of each Let b1 – b6 denote the state of each
sensor. 0 for white line and 1 for black linesensor. 0 for white line and 1 for black lineStep3:Step3:
Line Position = Line Position = ΣΣaibiaibi
Step4:Step4:Vcm is fixed, Vcm is fixed,
predeterminedpredeterminedωωcm is cm is
proportional to Line proportional to Line positionposition
Step5:Step5:Vl = Vcm + (Vl = Vcm + (ωωcm / a)cm / a)Vr = Vcm – (Vr = Vcm – (ωωcm / a)cm / a)a : Separation between left/right a : Separation between left/right wheelswheels