Embed Size (px)
Citation preview

Automatic features extraction in Automatic features extraction in sub-urban landscape using very high sub-urban landscape using very high
resolution Cosmo-SkyMed SAR imagesresolution Cosmo-SkyMed SAR images
Fabio Del Frate, Fabio Del Frate, Chiara Pratola, Giovanni Chiara Pratola, Giovanni Schiavon, Domenico SoliminiSchiavon, Domenico Solimini
IGARSS 2011 – International Geoscience And Remote Sensing Symposium IGARSS 2011 – International Geoscience And Remote Sensing Symposium
Tor Vergata University, Rome - ItalyTor Vergata University, Rome - ItalyEarth Observation LaboratoryEarth Observation Laboratory

2
COstellation of Small Satellites COstellation of Small Satellites for the Mediterranean basin for the Mediterranean basin
Observation Observation
• Italian Space Agency (ASI) mission
• Constellation of four satellites COSMO (1-4) equipped with X-band SAR sensors with global coverage of the planet
COSMO-SKYMED MISSIONCOSMO-SKYMED MISSION
• Spotlight: 1 m Spotlight: 1 m spatial resolution
IGARSS 2011 – 24-29 July 2011 Vancouver, Canada IGARSS 2011 – 24-29 July 2011 Vancouver, Canada
• Observations of an area of interest can be repeated several times a day in all-weather conditions (revisit time of about 140 min)

3
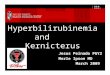
TEST SITETEST SITE
Tor Vergata area in Rome, ItalyTor Vergata area in Rome, Italy
World View 2 image, 10World View 2 image, 10th th February 2010February 2010
IGARSS 2011 – 24-29 July 2011 Vancouver, Canada IGARSS 2011 – 24-29 July 2011 Vancouver, Canada
Cosmo-SkyMed image, 9Cosmo-SkyMed image, 9th th July 2010July 2010
Central area of the Central area of the University Campus University Campus
Residential areaResidential area
Business buildingBusiness buildingShopping mallShopping mall
BuildingsBuildings

4IGARSS 2011 – 24-29 July 2011 Vancouver, Canada IGARSS 2011 – 24-29 July 2011 Vancouver, Canada
StreetsStreets
MotorwayMotorwayMedium-size streetMedium-size streetNarrow streetNarrow street
TEST SITETEST SITE
Tor Vergata area in Rome, ItalyTor Vergata area in Rome, Italy
World View 2 image, 10World View 2 image, 10th th February 2010February 2010 Cosmo-SkyMed image, 9Cosmo-SkyMed image, 9th th July 2010July 2010

5IGARSS 2011 – 24-29 July 2011 Vancouver, Canada IGARSS 2011 – 24-29 July 2011 Vancouver, Canada
Natural areasNatural areas
GrasslandGrasslandCultivated FieldCultivated FieldTreesTreesBare soilBare soil
TEST SITETEST SITE
Tor Vergata area in Rome, ItalyTor Vergata area in Rome, Italy
World View 2 image, 10World View 2 image, 10th th February 2010February 2010 Cosmo-SkyMed image, 9Cosmo-SkyMed image, 9th th July 2010July 2010

6
CLASSIFICATION ALGORITHMCLASSIFICATION ALGORITHM
Pixel-based NN classifierPixel-based NN classifier
IGARSS 2011 – 24-29 July 2011 Vancouver, Canada IGARSS 2011 – 24-29 July 2011 Vancouver, Canada
NNs are recognized as rather competitive algorithms NNs are recognized as rather competitive algorithms but one has to be very careful to avoid overfitting in but one has to be very careful to avoid overfitting in the training phasethe training phase

HIDDEN LAYERS
CLASSIFICATION ALGORITHMCLASSIFICATION ALGORITHM
WHAT IN INPUT ? WHAT IN OUTPUT ?
•Backscattering Intensity
• Local textural parameters
•GLCM texture information
•Backscattering Intensity
• Local textural parameters
•GLCM texture information
Asphalt
Short vegetation + bare soil
Tall vegetation + trees
Manmade

8
GLCMGLCM
Gray Level Co-Occurrence Matrix (Haralick et al., 1973)Gray Level Co-Occurrence Matrix (Haralick et al., 1973)
IGARSS 2011 – 24-29 July 2011 Vancouver, Canada IGARSS 2011 – 24-29 July 2011 Vancouver, Canada
0 0 1 1
0 0 1 1
0 2 2 2
2 2 3 3
The matrix is computed with reference to a predefined box in the image, to a predefined number of gray levels, pixel distance (d) and direction (q)
4 gray levels (0, 1, 2, 3)d=1 and q=0°
2100
1601
0042
0124
)0,1(P
The element Pij of the matrix says how many times the element with gray level i is distant d pixels, in q direction, from an element with gray level j
0 1 2 30
1
2
3

GLCM TEXTURE INFORMATIONGLCM TEXTURE INFORMATION
GLCM parametersGLCM parameters
Shift
Direction
Quantization levels
Investigation on the most suitable parametersInvestigation on the most suitable parameters
FIXED
Window size
d = 15
q = 45°
64
GLCM measuresGLCM measures
SEARCH FOR OPTIMUM VALUE/MEASURE
Transformed Divergence (TD)Transformed Divergence (TD)(Bartolucci et al, 1983)(Bartolucci et al, 1983)
8,
12),(jiD
ejiTD
• Di,j : divergence between classes i and j
Max[TD(i, j)] = 2
If TD(i, j) ≥ 1.9 then classes i and j are well distinguishable

•Spotlight mode: 1 m spatial resolution• Polarization: HH• Right Ascending• Incidence angle: ~ 25° • Date of acquisition: 9th July 2010• Image dimension: 5000 x 5000 pixels
TEST IMAGETEST IMAGE
IGARSS 2011 – 24-29 July 2011 Vancouver, Canada IGARSS 2011 – 24-29 July 2011 Vancouver, Canada

BUILDINGS EXAMPLESBUILDINGS EXAMPLES
IGARSS 2011 – 24-29 July 2011 Vancouver, Canada IGARSS 2011 – 24-29 July 2011 Vancouver, Canada

BUILDINGS EXAMPLESBUILDINGS EXAMPLES
IGARSS 2011 – 24-29 July 2011 Vancouver, Canada IGARSS 2011 – 24-29 July 2011 Vancouver, Canada

ASPHALT EXAMPLESASPHALT EXAMPLES
IGARSS 2011 – 24-29 July 2011 Vancouver, Canada IGARSS 2011 – 24-29 July 2011 Vancouver, Canada

ASPHALT EXAMPLESASPHALT EXAMPLES
IGARSS 2011 – 24-29 July 2011 Vancouver, Canada IGARSS 2011 – 24-29 July 2011 Vancouver, Canada

VEGETATION EXAMPLESVEGETATION EXAMPLES
IGARSS 2011 – 24-29 July 2011 Vancouver, Canada IGARSS 2011 – 24-29 July 2011 Vancouver, Canada

VEGETATION EXAMPLESVEGETATION EXAMPLES
IGARSS 2011 – 24-29 July 2011 Vancouver, Canada IGARSS 2011 – 24-29 July 2011 Vancouver, Canada

17IGARSS 2011 – 24-29 July 2011 Vancouver, Canada IGARSS 2011 – 24-29 July 2011 Vancouver, Canada
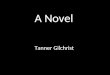
GLCM texture information Analysis GLCM texture information Analysis
Variation of the TD measure with the window sizeVariation of the TD measure with the window size

18IGARSS 2011 – 24-29 July 2011 Vancouver, Canada IGARSS 2011 – 24-29 July 2011 Vancouver, Canada
Mean values of the GLCM measures computed on the 4 classes
GLCM texture information Analysis GLCM texture information Analysis

IGARSS 2011 – 24-29 July 2011 Vancouver, Canada IGARSS 2011 – 24-29 July 2011 Vancouver, Canada
1. Backscattering Intensity
2. Local mean box 3x33. Mean4. Contrast
1. Backscattering Intensity
2. Local mean box 3x33. Mean4. Contrast
Class Training Validation
A 3557 1336
LV 3347 1316
T 3274 1365
MM 3338 1354
Tot 13516 5371
Overall accuracy: 81.8%
NN TOPOLOGY: 4x12x12x4NN TOPOLOGY: 4x12x12x4
CLASSIFICATION RESULTS CLASSIFICATION RESULTS
INPUTSINPUTS

IGARSS 2011 – 24-29 July 2011 Vancouver, Canada IGARSS 2011 – 24-29 July 2011 Vancouver, Canada
1. Backscattering Intensity2. Local mean (box 3x3)3. Mean4. Contrast
1. Backscattering Intensity2. Local mean (box 3x3)3. Mean4. Contrast
1. Backscattering Intensity2. Local mean (box 3x3)3. Local standard deviation
(box 3x3)
1. Backscattering Intensity2. Local mean (box 3x3)3. Local standard deviation
(box 3x3)
NN: 4x12x12x4 (81.8%)NN: 3x12x12x4 (73.5%)
CLASSIFICATION RESULTS CLASSIFICATION RESULTS

21IGARSS 2011 – 24-29 July 2011 Vancouver, Canada IGARSS 2011 – 24-29 July 2011 Vancouver, Canada
Asphalt
Low vegetation
Trees
Manmade structures
3 INPUT (UP)3 INPUT (UP)
4 INPUT (DOWN)4 INPUT (DOWN)
CLASSIFICATION RESULTS CLASSIFICATION RESULTS

• Spotlight mode: 1 m spatial resolution• Polarization: HH• Right Ascending • Incidence angle: ~ 25° • Image dimension: 4230 x 2500 pixels
Fully Automatic ClassificationFully Automatic Classification
IGARSS 2011 – 24-29 July 2011 Vancouver, Canada IGARSS 2011 – 24-29 July 2011 Vancouver, Canada
8th June 2010
9th July 2010 10th July 2010

23
8th June 2010 9th July 2010
10th July 2010
TRAINING SET (4200 pixels for each image)TRAINING SET (4200 pixels for each image)andand
VALIDATION SET (1800 pixels for each image)VALIDATION SET (1800 pixels for each image)
Asphalt
Natural areas
Manmade structures
TRAINED NEURAL TRAINED NEURAL NETWORK (3x9x9x3)NETWORK (3x9x9x3)TRAINED NEURAL TRAINED NEURAL
NETWORK (3x9x9x3)NETWORK (3x9x9x3)
IGARSS 2011 – 24-29 July 2011 Vancouver, Canada IGARSS 2011 – 24-29 July 2011 Vancouver, Canada
Overall accuracy: 80.9%
Fully Automatic ClassificationFully Automatic Classification

24
CONCLUSIONSCONCLUSIONS
• In the classification of CosmoskyMed Spotlight images, considering 4 main land cover classes and a NN algorithm, an overall accuracy above 80% can be obtained using GLCM texture information.
Ongoing: Ongoing:
• Optimization of the algorithm also with regard to the other parameters on which the GLCM depends, such as the number quantization levels.
IGARSS 2011 – 24-29 July 2011 Vancouver, Canada IGARSS 2011 – 24-29 July 2011 Vancouver, Canada
• Use of a second image to exploit coherence information.
• Extention of the network scheme in order to incorporate also the information stemming from images taken at different polarizations and/or times of acquisition.

25
ACKNOWLEDGEMENTSACKNOWLEDGEMENTS
Cosmo-SkyMed images provided by ASI -AO project 1484, agreement N. I/061/09/0
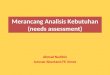
FUTURE DEVELOPMENTS FUTURE DEVELOPMENTS
• Development of a suitable automatic change detection algorithm based on Neural Networks (Pacifici et al., 2007).
IGARSS 2011 – 24-29 July 2011 Vancouver, Canada IGARSS 2011 – 24-29 July 2011 Vancouver, Canada
Old CSK Image
New CSK Image
Features Stack 1
Features Stack 2
Multi Temporal Operator
NN1 Classification MAP1
NN2 Classification MAP2
NN3 Classification CHANGE
MASK
CHANGE MAPMAP1-MAP2
ANDNAHIRI Change
Detection