Embed Size (px)
Citation preview

George F Luger
ARTIFICIAL INTELLIGENCE 6th editionStructures and Strategies for Complex Problem Solving
Machine Learning: Probabilistic
Luger: Artificial Intelligence, 6th edition. © Pearson Education Limited, 2009
13.0 Stochastic and dynamic Models of Learning
13.1 Hidden Markov Models (HMMs)
13.2 Dynamic Bayesian Networks and Learning
13.3 Stochastic Extensions to Reinforcement Learning
13.4 Epilogue and References
13.5 Exercises
1

D E F I N I T I O N
HIDDEN MARKOV MODEL
A graphical model is called a hidden Markov model (HMM) if it is a Markov model whose states are not directly observable but are hidden by a further stochastic system interpreting their output. More formally, given a set of states S = s1, s2, ..., sn, and given a set of state transition probabilities A = a11, a12, ..., a1n, a21, a22, ..., ..., ann, there is a set of observation likelihoods, O = pi(ot), each expressing the probability of an observation ot (at time t) being generated by a state st.
Luger: Artificial Intelligence, 6th edition. © Pearson Education Limited, 2009 2

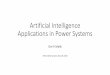
Figure 13.1 A state transition diagram of a hidden Markov model of two
states designed for the coin flipping problem. The aij
are
determined by the elements of the 2 x 2 transition matrix, A.
S1
S2
p(H) = b1
p(H) = b2
p(T) = 1 - b1
p(T) = 1 - b2
a1 1
a12
= 1 - a1 1
a21
= 1 - a22
a22
Luger: Artificial Intelligence, 6th edition. © Pearson Education Limited, 2009 3

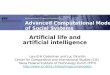
Figure 13.2 The state transition diagram for a three state hidden Markov
model of coin flipping. Each coin/state, Si
, has its bias, bi
.
S1
S2
S3
a1 1
a12
a21
a13
a31
a22
a33
a32
a23
p(T) = 1 - b1
p(H) = b1
p(H) = b2
p(H) = b2
p(H) = b3
p(T) = 1 - b3
Luger: Artificial Intelligence, 6th edition. © Pearson Education Limited, 2009 4

a. b. Figure 13.3. a. The hidden, S , and obser vab le, O, states of the AR-HMM where p(O t | S t , O t -1 ).
b. The values of the hidden S t of the e xample AR-HMM: saf e , unsaf e , and faulty .
Luger: Artificial Intelligence, 6th edition. © Pearson Education Limited, 2009 5

Figure 13.4 A selection of the real-time data across multiple time periods, with one time slice expanded, f or the AR-HMM.
Luger: Artificial Intelligence, 6th edition. © Pearson Education Limited, 2009 6

Figure 13.5 The time-series data of Figure 13.4 processed by a fast Four ier transf orm on the frequency domain. This was the data submitted to the AR-HMM f or each time per iod.
Luger: Artificial Intelligence, 6th edition. © Pearson Education Limited, 2009 7

Figure 13.6 An auto regressiv e factor ial HMM, where the observable state Ot, at time t is dependent on m ultiple (S t) subprocess , S i
t, and O t-1.
Luger: Artificial Intelligence, 6th edition. © Pearson Education Limited, 2009 8

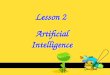
Figure 13.7 A PFSM representing a set of phonetically related Englishwords. The probability of each word occurring is below thatword. Adapted from Jurasky and Martin (2008).
Start#
n
n
n
n
iy t
iy
iy
iy
um
End#
d
.48
.52
.89
.11
.36.64
neat.00013
need.00056
new.001
knee.000024
Luger: Artificial Intelligence, 6th edition. © Pearson Education Limited, 2009 9

Figure 13.8 A trace of the Viterbi algorithm on several of the paths of Figure 13.7. Rows report the maximum value for Viterbi on each word for each input value (top row). Adapted from Jurafsky and Martin (2008).
Start = 1.0 # n iy # end
neat.000132 paths 1.0 1.0 x .00013 = .00013 .00013 x 1.0 = .00013 .00013 x .52 = .000067
need.000562 paths 1.0 1.0 x .00056 = .00056 .00056 x 1.0 = .00056 .00056 x .11 = .000062
new.0012 paths 1.0 1.0 x .001 = .001 .001 x .36 = .00036 .00036 x 1.0 = .00036
knee.0000241 path 1.0 1.0 x .000024 = .000024 .000024 x 1.0 = .000024 .000024 x 1.0 = .000024
Total best .00036
Luger: Artificial Intelligence, 6th edition. © Pearson Education Limited, 2009 10

function Viterbi(Observations of length T, Probabilistic FSM)
beginnumber := number of states in FSMcreate probability matrix viterbi[R = N + 2, C = T + 2];viterbi[0, 0] := 1.0;for each time step (observation) t from 0 to T do for each state si from i = 0 to number do
for each transition from si to sj in the Probabilistic FSM do begin
new-count := viterbi[si, t] x path[si, sj] x p(sj | si);if ((viterbi[sj, t + 1] = 0) or (new-count > viterbi[sj, t + 1])) then begin
viterbi[si, t + 1] := new-count append back-pointer [sj , t + 1] to back-pointer list
end end;
return viterbi[R, C];return back-pointer list
end.
Luger: Artificial Intelligence, 6th edition. © Pearson Education Limited, 2009 11

Figure 13.9 A DBN example of two time slices. The set Q of random variables are hidden, the set O observed, t indicates time.
Luger: Artificial Intelligence, 6th edition. © Pearson Education Limited, 2009 12

Figure 13.10 A Bayesian belief net for the burglar alarm, earthquake, burglary example.
Luger: Artificial Intelligence, 6th edition. © Pearson Education Limited, 2009 13

Figure 13.11 A Markov random field reflecting the potential functions of the random variables in the BBN of Figure 13.10, together with thetwo observations about the system.
Luger: Artificial Intelligence, 6th edition. © Pearson Education Limited, 2009 14

Figure 13.12. A learnable node L is added to the Markov random field of Figure 13.11. The Markov random field iterates across three time periods.For simplicity, the EM iteration is only indicated at time 1.
Luger: Artificial Intelligence, 6th edition. © Pearson Education Limited, 2009 15

D E F I N I T I O N
A MARKOV DECISION PROCESS, or MDP
A Markov Decision Process is a tuple <S, A, P, R> where: S is a set of states, andA is a set of actions.pa(st , st+1) = p(st+1 | st , at = a) is the probability that if the agent executes
action a ΠA from state st at time t, it results in state st+1 at time t+1. Sincethe probability, pa ΠP is defined over the entire state-space of actions, it isoften represented with a transition matrix.
R(s) is the reward received by the agent when in state s.
Luger: Artificial Intelligence, 6th edition. © Pearson Education Limited, 2009 16

D E F I N I T I O N
A PARTIALLY OBSERVABLE MARKOV DECISION PROCESS, or POMDP
A Partially Observable Markov Decision Process is a tuple <S, A, O, P, R> where: S is a set of states, andA is a set of actions.O is the set of observations denoting what the agent can see about its world.
Since the agent cannot directly observe its current state, the observations areprobabilistically related to the underlying actual state of the world.
pa(st, o, st+1) = p(st+1 , ot = o | st , at = a) is the probability that when the agent executes action a from state st at time t, it results in an observation o thatleads to an underlying state st +1 at time t+1.
R(st, a, st+1) is the reward received by the agent when it executes action a in state st and transitions to state st+1.
Luger: Artificial Intelligence, 6th edition. © Pearson Education Limited, 2009 17

st s t+1 at pa (s t,s t+1) Ra(s t,s t+1)
high high search a R_searchhigh low search 1 - a R_searchlow high search 1 - b -3low low search b R_searchhigh high wait 1 R_waithigh low wait 0 R_waitlow high wait 0 R_waitlow low wait 1 R_waitlow high recharge 1 0low low recharge 0 0
rewards possible from the current state at. nations of the current state, st, next state , st+1, the actions and
Table 13.1. Transition probabilities and expected rewards for the finite MDP of the recycling robot example. The table contains all possible combi-
Luger: Artificial Intelligence, 6th edition. © Pearson Education Limited, 2009 18

Figure 13.13. The transition graph for the recycling robot. The state nodes are the large circles and the action nodes are the small black states.
Luger: Artificial Intelligence, 6th edition. © Pearson Education Limited, 2009 19














![Artificial Intelligence · Artificial Intelligence 2016-2017 Introduction [5] Artificial Brain: can machines think? Artificial Intelligence 2016-2017 Introduction [6] ... Deep Blue](https://img.pdfslide.us/doc/110x75/5f0538917e708231d411e192/artificial-intelligence-artificial-intelligence-2016-2017-introduction-5-artificial.jpg)