Embed Size (px)
Citation preview

SELECTION AND REPRESENTATION OF ATTRIBUTES FORSOFTWARE DEFECT PREDICTION
SADIA SHARMINBSSE 0426
A ThesisSubmitted to the Bachelor of Science in Software Engineering Program Office
of the Institute of Information Technology, University of Dhakain Partial Fulfillment of theRequirements for the Degree
BACHELOR OF SCIENCE IN SOFTWARE ENGINEERING
Institute of Information TechnologyUniversity of Dhaka
DHAKA, BANGLADESH
c© SADIA SHARMIN, 2015
SELECTION AND REPRESENTATION OF ATTRIBUTES FOR SOFTWAREDEFECT PREDICTION
SADIA SHARMIN
Approved:
Signature Date
Supervisor: Dr. Mohammad Shoyaib
Committee Member: Dr. Kazi Muheymin-Us-Sakib
Committee Member: Dr. Md. Shariful Islam
Committee Member: Alim Ul Gias
Committee Member: Amit Seal Ami
ii

Abstract
For software quality assurance, software defect prediction (SDP) has drawn a great
deal of attention in recent years. Its goal is to reduce verification cost, time and
effort by predicting the defective modules efficiently. The datasets used in SDP
consist of attributes which are not equally important for predicting the defects of
software. Therefore, proper attribute selection plays a significant role in building
an acceptable defect prediction model. However, selection of proper attributes
and their representation in an efficient way are very challenging because except
few basic attributes most of them are derived attributes and their reliability are
still debatable.
To address these issues, we introduce Selection of Attribute with Log filtering
(SAL) to represent them in an organized way and to select the proper set of
attributes. Our proposed attribute selection process can effectively select the best
set of attributes, which are relevant for the discrimination of defected and non-
defected software modules. We have evaluated the proposed attribute selection
method using several widely used publicly available datasets. To validate our
model, we calculate the prediction performances using some of the commonly
used measurement scales such as balance, AUC (Area Under the ROC Curve).
The simulation results demonstrate that our method is more effective to improve
the accuracy of SDP than the existing state-of-the-art methods.
iii
Acknowledgments
I would like to thank my supervisor, Dr. Mohammad Shoyaib, Associate Profes-
sor of Institute of Information Technology (IIT) for his support, motivation and
suggestion during this thesis completion. With the help of his guidance I have
been able to bring the best out of me.
iv

Publications
The publications made during the course of this research have been listed below:-
1. Sadia Sharmin, Md Rifat Arefin, M. Abdullah-Al Wadud, Naushin Nower,
Mohammad Shoyaib, SAL: An Effective Method for Software Defect Pre-
diction, The 18th International Conference on Computer and Information
Technology (ICCIT), 2015. (Accepted)
2. Md. Habibur Rahman, Sadia Sharmin, Sheikh Muhammad Sarwar, Shah
Mostafa Khaled, Mohammad Shoyaib, Software Defect Prediction using
minimized attributes. Journal of Engineering and Technology (JET), IUT,
Dhaka, Bangladesh,2015.
v

Contents
Approval ii
Abstract iii
Acknowledgements iv
Publications v
Table of Contents vi
List of Tables viii
List of Figures ix
1 Introduction 11.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.3 Organization of the Thesis . . . . . . . . . . . . . . . . . . . . . . . 3
2 Background Study 52.1 Software Defect Prediction Model . . . . . . . . . . . . . . . . . . . 52.2 Evaluation Measurement Scales . . . . . . . . . . . . . . . . . . . . 62.3 Defect Prediction Metrics . . . . . . . . . . . . . . . . . . . . . . . 92.4 Defect Prediction Dataset . . . . . . . . . . . . . . . . . . . . . . . 112.5 Defect Prediction Classifiers . . . . . . . . . . . . . . . . . . . . . . 122.6 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3 Literature Review of Software Defect Prediction 163.1 Pre-processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173.2 Attribute Selection . . . . . . . . . . . . . . . . . . . . . . . . . . . 183.3 Classification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203.4 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
4 Methodology 224.1 Data Pre-processing . . . . . . . . . . . . . . . . . . . . . . . . . . 224.2 Attribute Selection . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.2.1 Ranking of Attributes . . . . . . . . . . . . . . . . . . . . . 234.2.2 Selection of the Best Set of Attributes . . . . . . . . . . . . 24
vi

4.3 Classification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 254.4 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
5 Results 265.1 Evaluation Metrics . . . . . . . . . . . . . . . . . . . . . . . . . . . 265.2 Implementation Details . . . . . . . . . . . . . . . . . . . . . . . . . 275.3 Results and Discussions . . . . . . . . . . . . . . . . . . . . . . . . 275.4 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
6 Conclusion 31
Bibliography 33
vii

List of Tables
2.1 Confusion Matrix for Machine Learning . . . . . . . . . . . . . . . . 62.2 Software Code Attributes of Defect Prediction . . . . . . . . . . . . 92.3 NASA Dataset Overview . . . . . . . . . . . . . . . . . . . . . . . . 11
5.1 Comparison of Balance Values of Different Defect Prediction Meth-ods . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
5.2 Comparison of AUC Values of Different Defect Prediction Methods 295.3 Comparison of AUC Values of Different Classifiers using SAL . . . 30
viii

List of Figures
4.1 An Overview of Software Defect Prediction Process . . . . . . . . . 224.2 An Overview of Attribute Selection Process . . . . . . . . . . . . . 23
5.1 Performance of Log-filtering for Different ∈ Values . . . . . . . . . . 27
ix
Chapter 1
Introduction
In software development life-cycle, software testing is regarded as one of most
significant processes. In this stage, we try to identify the bugs of the software in
order to meet its required quality. More than 50% of time is spent in this phase
for maintaining the reliability and quality of software. It can be viewed as trade-
off of time, budget and quality. However, finding errors in the program modules
is not an easy task to perform. As a result, many defect prediction techniques
have been introduced approaching this problem. It has become an integral part of
testing phase. A lot of researches have been undergoing for building a good defect
prediction technique in order to predict the defective modules in an efficient way.
1.1 Motivation
In recent years, software defect prediction (SDP) has become an important re-
search topic in the field of software industry. SDP is the way to estimate the
location of the bugs of the software after being developed so that the quality and
the productivity can be improved.
The historical datasets collected during software development phase consist
of the data about software based on some software metrics like line of code, cy-
clomatic complexity, essential complexity, total operators and operands etc. This
1

attributes are regarded as the measurement of software. By using these attributes,
we can predict which components are more likely to be defect-prone as compared
to the others. The performance of a defect prediction model is usually significantly
influenced by the characteristics of the attributes [1]. However, a set of standard
attributes has not yet been agreed that can be used for defect prediction. It is
found that the attributes of different datasets used for SDP are not same. All
of them are not even necessary for defect prediction [2]. Rather, some attributes
might decrease the performance of defect prediction models. In contrast, some
are highly responsible. Performance of these models increases if we remove these
irrelevant and unnecessary attributes [1, 3, 4]. Therefore, one of the main con-
cerns is to remove the unnecessary or irrelevant attributes from the set of available
attributes so that the minimized set can lead to a faster model training [4].
Apart from attribute selection, pre-processing of data also improves the classi-
fication performance. The training data sets are pre-processed to remove outliers,
handle missing value, discretize or transform numeric attributes etc. which influ-
ence the prediction result [5]. The overall performance of defect prediction can be
realized by the combination of an effective attribute selection method augmented
by a suitable normalization technique.
Classifiers are used to discriminate the non-defect modules from the defective
ones by using a prediction model derived from the training data-sets. A variety
of learning algorithms have been applied as classifiers, but none has proven to
be consistently accurate. These classifiers include statistical algorithm, machine
learning algorithm, rules based algorithm and mixed algorithms etc. Thus, another
research area in this regard is to find an appropriate classifier for the selected
attributes to get the final decision.
2
1.2 Objectives
Various defect predication techniques have been experimented and analyzed till
now. But there is no standard model of defect prediction which will generate the
best result for identifying the bugs. Implementing a new defect prediction tech-
nique covering limitations of existing approaches or bringing some modifications
can produce better result. So, the objectives of my study are:
1. To analyze the existing pre-processing methods and find out how they can be
used with the attribute selection methods more efficiently to produce better
result.
2. To analyze the limitations of the existing methods and propose an effective
attribute selection method that will improve the accuracy of software defect
prediction.
3. To do a comparative study among the classifiers in order to find out the
appropriate one for the best set of attributes.
1.3 Organization of the Thesis
This section provides an overview about the remaining chapters of this thesis. The
chapters are organized as follows:
Chapter 2: This chapter describes the background of the thesis work describ-
ing the defect prediction models and its associated attributes, defect prediction
datasets etc.
Chapter 3: In this chapter the existing works have been discussed for defect
prediction.
Chapter 4: This chapter presents the contributions of this thesis and how it
works to improve the defect prediction accuracy. All the algorithms along with
necessary descriptions have been presented in this chapter.
3

Chapter 5: The experimental design and their results are discussed in this
chapter.
Chapter 6: This chapter concludes the thesis work giving some future direc-
tions of our work.
4
Chapter 2
Background Study
Software Defect prediction has been an active research area in software engineering
due to its positive impact on quality assurance. It provides the list of defect-prone
software modules which help the quality assurance team to allocate its limited
resource for testing and investigating the software products. The most important
fact in software defect prediction is the training and testing data set as these come
in the form of software metrics where a software code is represented as attributes
(i.e. lines of code, cyclomatic complexity, branch count etc.). Based on this
software product metrics, several publicly available dataset has been prepared to
accommodate the defect prediction purposes. In these circumstances, defect pre-
diction may be done using some of the statistical and machine learning classifiers
(i.e. Bayesian network, Logistic Regression etc.) and the performance can be eval-
uated using some of the commonly used measurement scales (i.e. balance, Area
under the ROC Curve etc.).
2.1 Software Defect Prediction Model
The first task of building a prediction model is to extract instances from software.
The software archives may be an email-archive, issue tracking system, version
control system and historical database etc. Every instances of these archive rep-
5
resent a system, a software package, a source code file, a class, a function (or
method) change according to prediction granularity. An instance contains several
attributes which are extracted from the software archive and all are labeled with
defected/no-defected or the number of bugs.
When we have instances with metrics and their corresponding labels, the next
task is to pre-process those instances which is a commonly used technique in
machine learning. Many defect prediction tasks have been conducted using the
concept of pre-processing of the dataset which includes noise reduction, attribute
selection, data normalization. When the pre-processing step is completed and we
get the final set of training instances, we can train the defect prediction model.
After that, if a new test instance needs to classify, we pass it to the defect predic-
tion model and we get a binary classification of that instances as defected or not
defected.
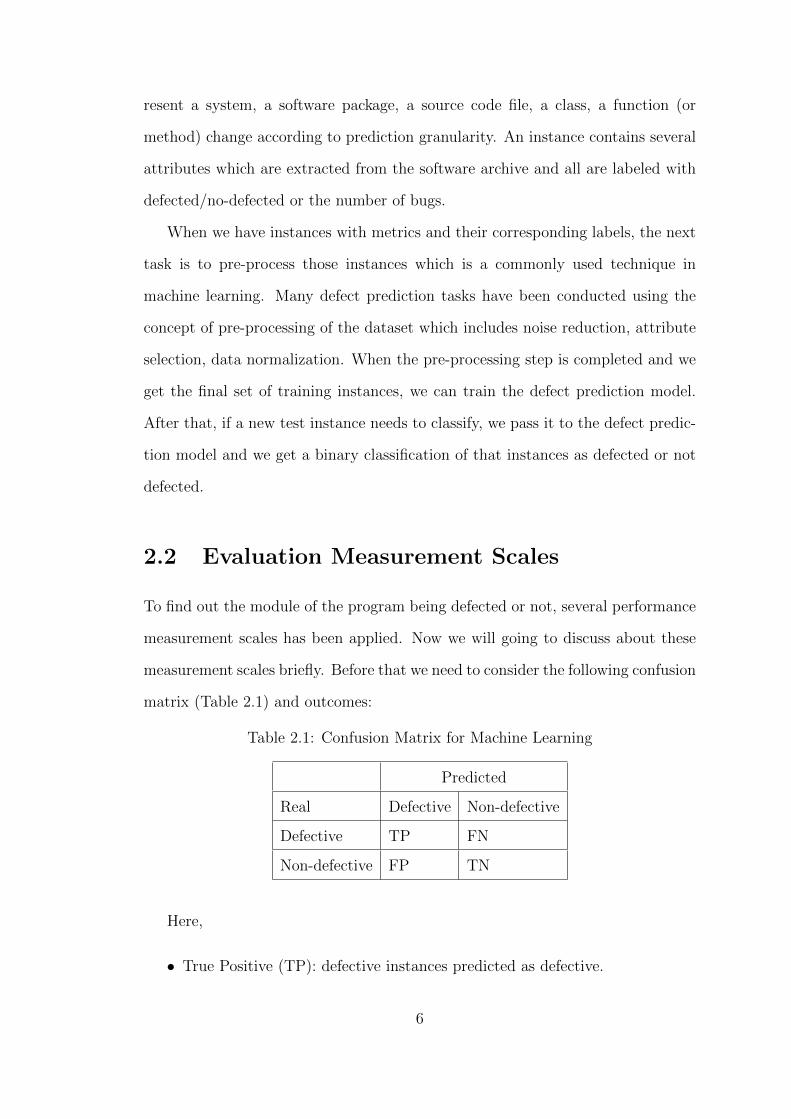
2.2 Evaluation Measurement Scales
To find out the module of the program being defected or not, several performance
measurement scales has been applied. Now we will going to discuss about these
measurement scales briefly. Before that we need to consider the following confusion
matrix (Table 2.1) and outcomes:
Table 2.1: Confusion Matrix for Machine Learning
Predicted
Real Defective Non-defective
Defective TP FN
Non-defective FP TN
Here,
• True Positive (TP): defective instances predicted as defective.
6
• False Positive (FP): Non-defective instances predicted as defective.
• True Negative (TN): Non-defective instances predicted as non-defective.
• False Negative (FN): Defective instances predicted as non-defective.
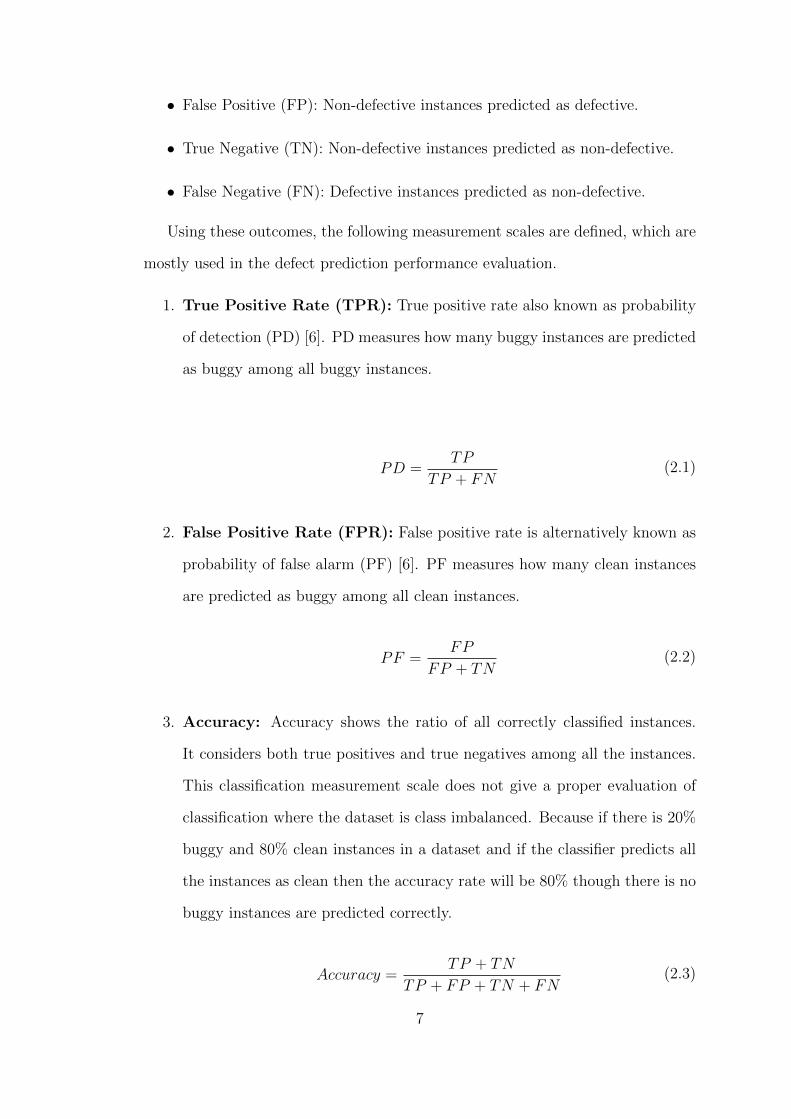
Using these outcomes, the following measurement scales are defined, which are
mostly used in the defect prediction performance evaluation.
1. True Positive Rate (TPR): True positive rate also known as probability
of detection (PD) [6]. PD measures how many buggy instances are predicted
as buggy among all buggy instances.
PD =TP
TP + FN(2.1)
2. False Positive Rate (FPR): False positive rate is alternatively known as
probability of false alarm (PF) [6]. PF measures how many clean instances
are predicted as buggy among all clean instances.
PF =FP
FP + TN(2.2)
3. Accuracy: Accuracy shows the ratio of all correctly classified instances.
It considers both true positives and true negatives among all the instances.
This classification measurement scale does not give a proper evaluation of
classification where the dataset is class imbalanced. Because if there is 20%
buggy and 80% clean instances in a dataset and if the classifier predicts all
the instances as clean then the accuracy rate will be 80% though there is no
buggy instances are predicted correctly.
Accuracy =TP + TN
TP + FP + TN + FN(2.3)
7
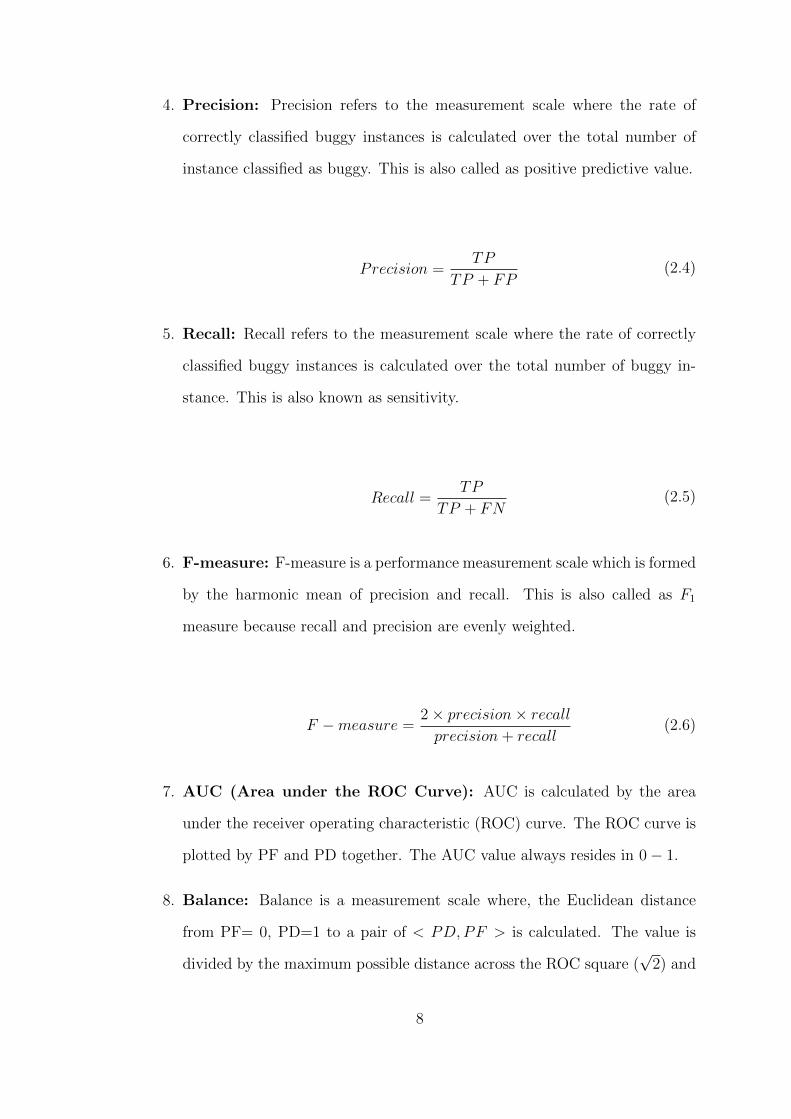
4. Precision: Precision refers to the measurement scale where the rate of
correctly classified buggy instances is calculated over the total number of
instance classified as buggy. This is also called as positive predictive value.
Precision =TP
TP + FP(2.4)
5. Recall: Recall refers to the measurement scale where the rate of correctly
classified buggy instances is calculated over the total number of buggy in-
stance. This is also known as sensitivity.
Recall =TP
TP + FN(2.5)
6. F-measure: F-measure is a performance measurement scale which is formed
by the harmonic mean of precision and recall. This is also called as F1
measure because recall and precision are evenly weighted.
F −measure =2× precision× recall
precision + recall(2.6)
7. AUC (Area under the ROC Curve): AUC is calculated by the area
under the receiver operating characteristic (ROC) curve. The ROC curve is
plotted by PF and PD together. The AUC value always resides in 0− 1.
8. Balance: Balance is a measurement scale where, the Euclidean distance
from PF= 0, PD=1 to a pair of < PD,PF > is calculated. The value is
divided by the maximum possible distance across the ROC square (√
2) and
8
subtracted from 1.
Balance = 1−
√(1− pd)2 + (0− pf)2
2(2.7)
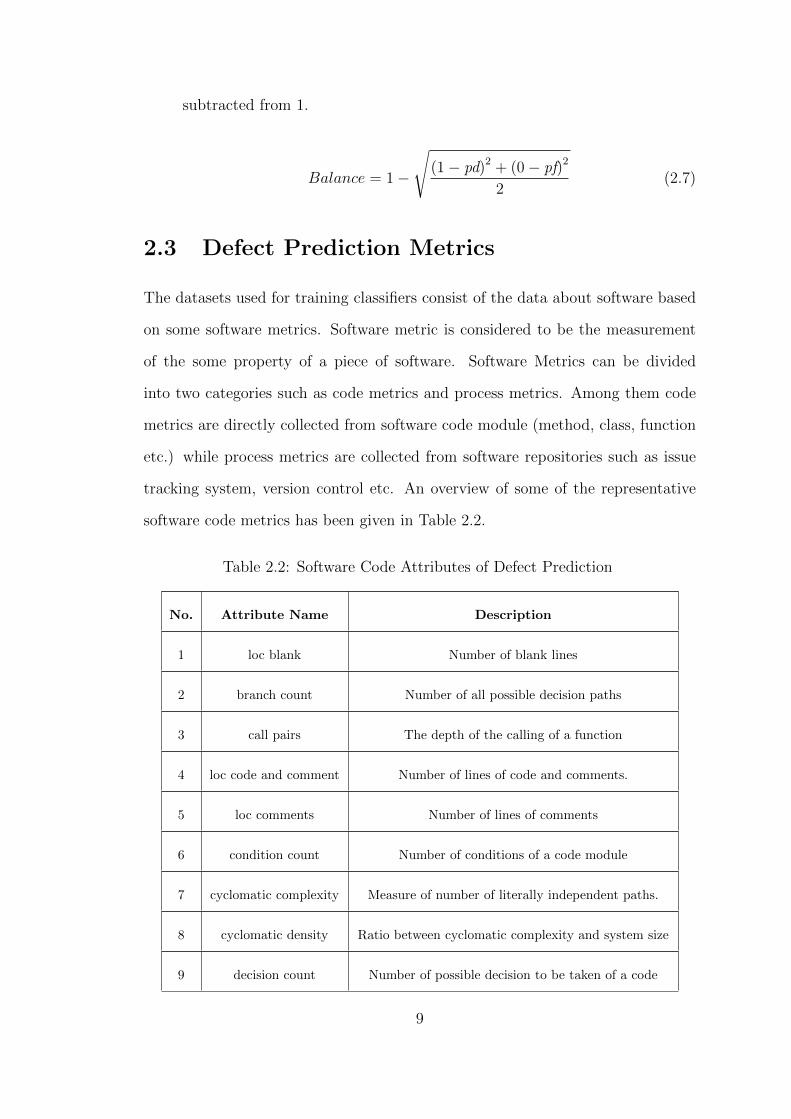
2.3 Defect Prediction Metrics
The datasets used for training classifiers consist of the data about software based
on some software metrics. Software metric is considered to be the measurement
of the some property of a piece of software. Software Metrics can be divided
into two categories such as code metrics and process metrics. Among them code
metrics are directly collected from software code module (method, class, function
etc.) while process metrics are collected from software repositories such as issue
tracking system, version control etc. An overview of some of the representative
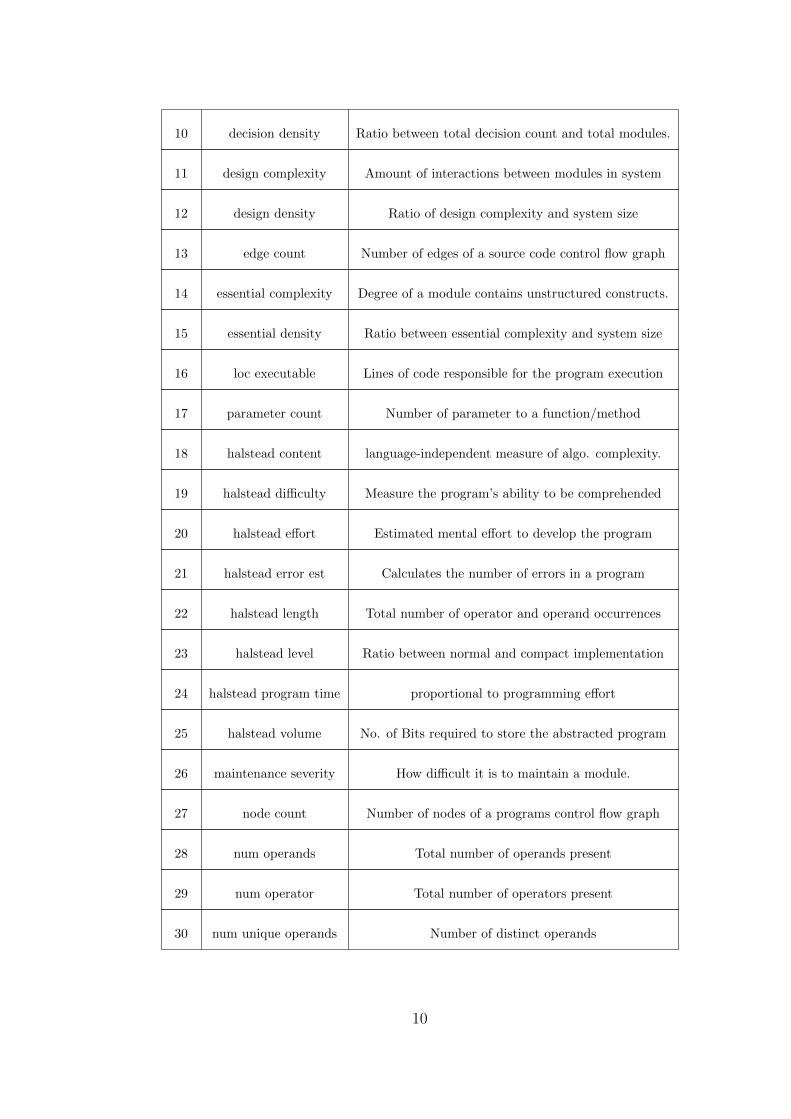
software code metrics has been given in Table 2.2.
Table 2.2: Software Code Attributes of Defect Prediction
No. Attribute Name Description
1 loc blank Number of blank lines
2 branch count Number of all possible decision paths
3 call pairs The depth of the calling of a function
4 loc code and comment Number of lines of code and comments.
5 loc comments Number of lines of comments
6 condition count Number of conditions of a code module
7 cyclomatic complexity Measure of number of literally independent paths.
8 cyclomatic density Ratio between cyclomatic complexity and system size
9 decision count Number of possible decision to be taken of a code
9
10 decision density Ratio between total decision count and total modules.
11 design complexity Amount of interactions between modules in system
12 design density Ratio of design complexity and system size
13 edge count Number of edges of a source code control flow graph
14 essential complexity Degree of a module contains unstructured constructs.
15 essential density Ratio between essential complexity and system size
16 loc executable Lines of code responsible for the program execution
17 parameter count Number of parameter to a function/method
18 halstead content language-independent measure of algo. complexity.
19 halstead difficulty Measure the program’s ability to be comprehended
20 halstead effort Estimated mental effort to develop the program
21 halstead error est Calculates the number of errors in a program
22 halstead length Total number of operator and operand occurrences
23 halstead level Ratio between normal and compact implementation
24 halstead program time proportional to programming effort
25 halstead volume No. of Bits required to store the abstracted program
26 maintenance severity How difficult it is to maintain a module.
27 node count Number of nodes of a programs control flow graph
28 num operands Total number of operands present
29 num operator Total number of operators present
30 num unique operands Number of distinct operands
10
31 num unique operators Number of distinct operators
32 number of lines Total number of lines of a programs source code
33 percent comment Percentage of comments of a programs source code
34 loc total Total number of lines of code
35 is defective defect labels (Y/N, True/False)
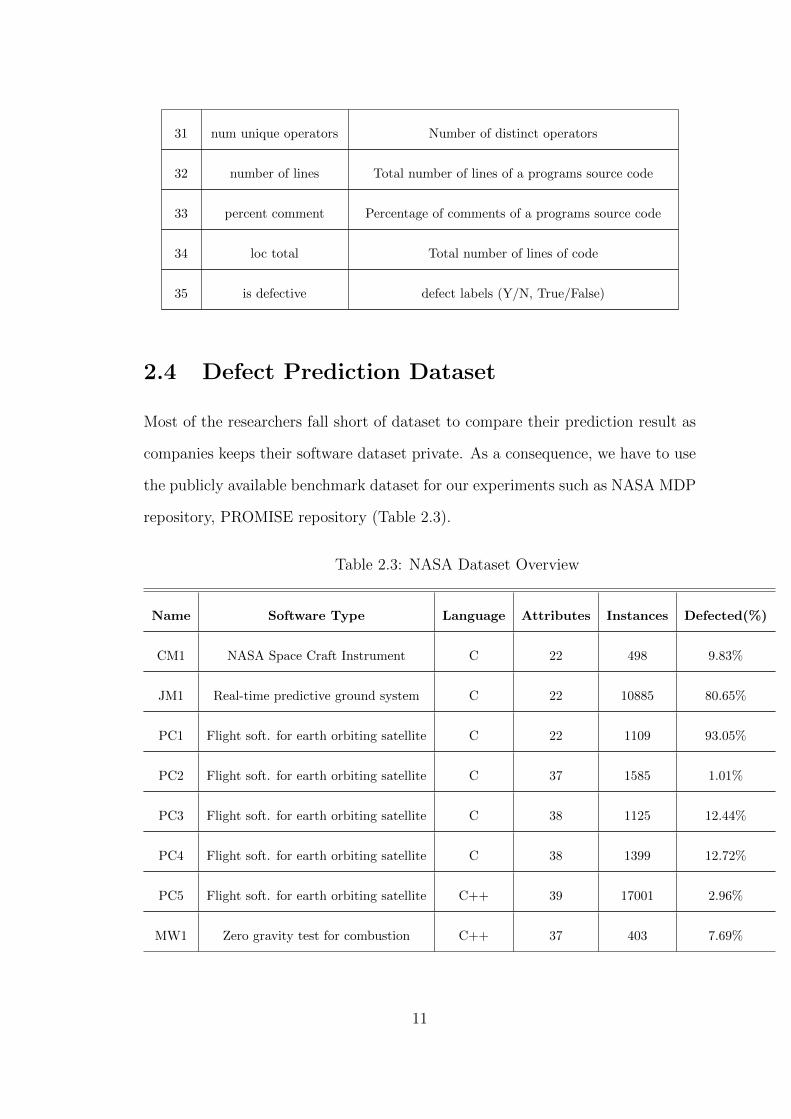
2.4 Defect Prediction Dataset
Most of the researchers fall short of dataset to compare their prediction result as
companies keeps their software dataset private. As a consequence, we have to use
the publicly available benchmark dataset for our experiments such as NASA MDP
repository, PROMISE repository (Table 2.3).
Table 2.3: NASA Dataset Overview
Name Software Type Language Attributes Instances Defected(%)
CM1 NASA Space Craft Instrument C 22 498 9.83%
JM1 Real-time predictive ground system C 22 10885 80.65%
PC1 Flight soft. for earth orbiting satellite C 22 1109 93.05%
PC2 Flight soft. for earth orbiting satellite C 37 1585 1.01%
PC3 Flight soft. for earth orbiting satellite C 38 1125 12.44%
PC4 Flight soft. for earth orbiting satellite C 38 1399 12.72%
PC5 Flight soft. for earth orbiting satellite C++ 39 17001 2.96%
MW1 Zero gravity test for combustion C++ 37 403 7.69%
11
KC1 Storage Management C++ 22 2109 15.45%
KC2 Storage Management for ground data C++ 22 522 20.49%
KC3 Storage management for ground data Java 39 458 9%
KC4 Storage management for ground data Perl 39 125 49%
MC1 Storage management for ground data C, C++ 39 9466 0.70%
MC2 Video guidance system C,C++ 39 161 32%
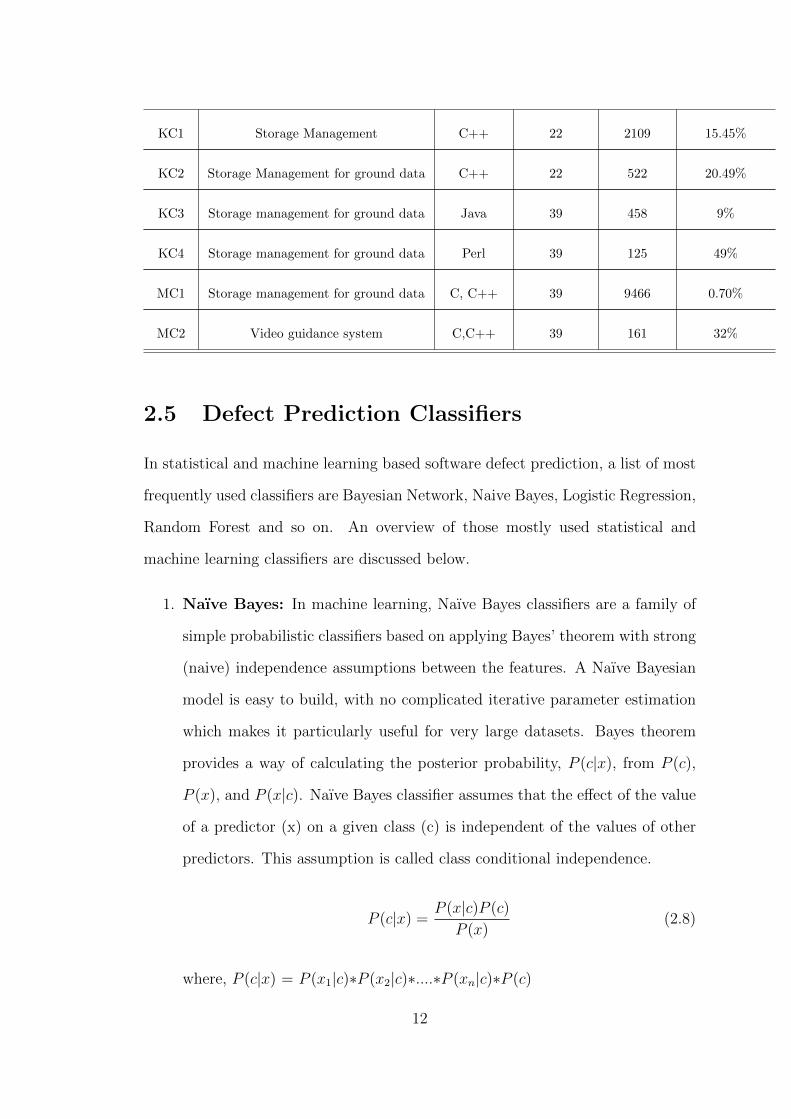
2.5 Defect Prediction Classifiers
In statistical and machine learning based software defect prediction, a list of most
frequently used classifiers are Bayesian Network, Naive Bayes, Logistic Regression,
Random Forest and so on. An overview of those mostly used statistical and
machine learning classifiers are discussed below.
1. Naıve Bayes: In machine learning, Naıve Bayes classifiers are a family of
simple probabilistic classifiers based on applying Bayes’ theorem with strong
(naive) independence assumptions between the features. A Naıve Bayesian
model is easy to build, with no complicated iterative parameter estimation
which makes it particularly useful for very large datasets. Bayes theorem
provides a way of calculating the posterior probability, P (c|x), from P (c),
P (x), and P (x|c). Naıve Bayes classifier assumes that the effect of the value
of a predictor (x) on a given class (c) is independent of the values of other
predictors. This assumption is called class conditional independence.
P (c|x) =P (x|c)P (c)
P (x)(2.8)
where, P (c|x) = P (x1|c)∗P (x2|c)∗....∗P (xn|c)∗P (c)
12

• P (c|x) is the posterior probability of class (target)given predictor (at-
tribute).
• P (c) is the prior probability of class.
• P (x|c) is the likelihood which is the probability of predictor given class.
• P (x) is the prior probability of predictor.
2. Logistic Regression: Logistic regression is a statistical method for ana-
lyzing a dataset in which there are one or more independent variables that
determine an outcome. The outcome is measured with a dichotomous vari-
able (in which there are only two possible outcomes).In logistic regression,
the dependent variable is binary or dichotomous, i.e. it only contains data
coded as 1 (TRUE, success, pregnant, etc. ) or 0 (FALSE, failure, non-
pregnant, etc.).
The goal of logistic regression is to find the best fitting (yet biologically rea-
sonable) model to describe the relationship between the dichotomous charac-
teristic of interest (dependent variable = response or outcome variable) and
a set of independent (predictor or explanatory) variables. Logistic regression
generates the coefficients (and its standard errors and significance levels) of
a formula to predict a logit transformation of the probability of presence of
the characteristic of interest:
logit(p)= b0 + b1X1 + b2X2 + ...... bkXk
where p is the probability of presence of the characteristic of interest. The
logit transformation is defined as the logged odds:
odds =P
1− P=
probabilityofpresenceofcharacteristic
probabilityofpresenceofcharacteristic(2.9)
and
13

logit(P ) = ln(P
1− P) (2.10)
3. Decision Tree: Decision Trees are excellent classifier choosing between
several courses of action. It provides a highly effective structure within which
we can lay out options and investigate the possible outcomes of choosing
those options. They also help to form a balanced picture of the risks and
rewards associated with each possible course of action.
4. Random Forest: Random forest is a classification method based on en-
semble learning that operate by constructing a multitude of decision trees.
The response of each tree depends on a set of predictor values chosen in-
dependently and with the same distribution for all trees in the forest. For
classification problems, given a set of simple trees and a set of random pre-
dictor variables, the random forest method defines a margin function that
measures the extent to which the average number of votes for the correct
class exceeds the average vote for any other class present in the dependent
variable. This measure provides us not only with a convenient way of making
predictions, but also with a way of associating a confidence measure with
those predictions.
5. Bayesian Network: Bayesian network is a graphical model which encodes
probabilistic relationships among variables of interest. These graphical struc-
ture represents knowledge about an uncertain domain. In the graphical
model, each node represents a random variable and the edges are used to
represent the probabilistic dependencies among those variables. In Bayesian
network graph theory, probability theory, computer science and statistics are
combined which makes this a popular models in the last decade in machine
14

learning, text mining, natural language processing and so on.
2.6 Summary
In this chapter, we discussed the importance as well as the process of software de-
fect prediction. A detail overview of software attributes, datasets used for building
the prediction model are given here. Moreover, we summarized different types of
performance measurement metrics and classifiers along with their utilities.
15
Chapter 3
Literature Review of Software
Defect Prediction
In the recent years, software defect prediction has been become one of the most
important research issues in software engineering due to its great contribution in
improving the quality and productivity of software. In this chapter, the previous
work explored by different researchers in this context has been presented and
analyzed. Based on the existing literature, it is found that researchers emphasis
on different issues for Software Defect prediction including pre-processing of data,
attribute selection and classification methods. Moreover, the defect prediction
process can be categorized into two sections: Within-Project and Cross-Project
defect prediction based on the datasets. In case of insufficient datasets, cross-
project defect prediction has been done where training and test datasets come
from different projects. NASA MDP Repository and PROMISE Date Repository
are the mostly used available datasets in this field.
16
3.1 Pre-processing
The pre-processing strategy is a significant step while using the datasets in the ex-
periment. Sheppard et al. [7] analyzed different versions of NASA defects datasets
and showed the importance of pre-processing due to the presence of various in-
consistencies like missing and conflicting values, features with identical cases etc.
on the datasets. Because this erroneous and implausible value of data can lead to
the prediction result in an incorrect conclusion. Gray et al. [8] also explained the
need of data pre-processing before training the classifier and conducted five stages
of data cleaning process for 13 sets of original NASA dataset. Their concern arises
due to the presence of identical data both in training and testing sets as a result
of data replication. The cleaning method consists of five stages including the dele-
tion of constant and repeated attributes, replacing the missing values, enforcing
integrity of domain specific expertise and removing redundant and inconsistent
instances. The findings of this experiment reveal that the processed datasets be-
come 6-90% less from their original after cleaning and it improves the accuracy of
defect prediction.
Log-filtering, z-score, min-max are some widely used data pre-processing tech-
niques introduced in various researches [7, 9, 10, 11]. Nam et al. [10] used z-score,
variants of z-score and min-max normalization methods in their study in order
to provide all the values an equivalent weight to improve the prediction perfor-
mances. In another study, Gray et al. [11] normalized the data from -1 to +1 for
compressing the range of values. Little changes to data representation can affect
the results of feature selection and defect prediction greatly [11]. Song et al. [12]
utilized log-filtering preprocessor by replacing the numeric values with their log-
arithms, and showed that it performed well with Nave Bays classifier. Moreover,
log filtering can handle the extreme values and its normal distribution better suits
to data [13]. Menzies et al. [6] also processed the datasets using the logarithmic
17
method for improving the prediction performance.
3.2 Attribute Selection
Various attribute selection methods have already been proposed till to date. The
feature selection methods can be divided into two classes based on how they in-
tegrate the selection algorithm and the model building. Filter methods select the
attributes relying on the characteristic of the attributes without having any de-
pendency on the learning algorithm. On the other hand, wrapper based attribute
selection method include the predictor classification algorithm as a part of evalu-
ating the attribute subsets. Both type of selection algorithm have been discussed
here.
An attribute-ranking method was proposed in [2], which focused on select-
ing the minimum number of attributes required for an effective defect prediction
model. To do that, they proposed a threshold-based feature selection method
to come up with the necessary metrics for defect prediction. Five versions of
the proposed selection technique have been experimented creating different size
of metric subsets to assess their effectiveness at the time of defect prediction.
The versions are specified by five performances metrics-Mutual Information (MI),
Kolmogorov-Smirnov (KS), Deviance (DV), Area Under the ROC (Receiver Op-
erating Characteristic) Curve (AUC), and Area Under the Precision-Recall Curve
(PRC).They revealed that only three metrics are enough for SDP. However, it is
not confirmed that it will work with all datasets. Jobaer et al. [14] provided a
technique for choosing the best set of attributes in order to build a good prediction
model. Authors utilized a cardinality to choose the best set of attributes. How-
ever, the selection of this cardinality is heuristically defined which will not work
in general. Further, the frequency based ranking also might fail in many cases.
Gao et al. [4] introduced a hybrid attribute selection approach that first cat-
18

egorizes the important metrics by feature ranking approach and then chooses the
subsets of metrics through features subset selection approach. Another paper [1]
proposed a technique called hybrid attribute selection approach consisting of both
feature ranking and feature subset selection. In this experiment, five feature rank-
ing techniques including chi-square (CS), information gain (IG), gain ratio (GR),
KolmogorovSmirnov statistic (KS), two forms of the Relief algorithm (RLF), and
symmetrical uncertainty (SU) were studied along with four feature subset selection
algorithms: exhaustive search (ES), heuristic search (HS), and automatic hybrid
search (AHS) and no subset selection. The hybrid method first categorizes the
important attributes and reduces the search space using a search algorithm in
feature ranking approach. Then it chooses the subsets of metrics through features
subset selection approaches. It is found that automatic hybrid search (AHS) is
better than other search algorithm in the context of choosing attributes and the
removal of 85% metrics can enhance the performance of the prediction model in
some cases.
A general defect prediction framework consisting of a data pre-processor, at-
tribute selection, and learning algorithms is proposed by et al. [12]. They made
total 12 learning schemes by combining two data pre-processor, two wrapper based
attribute selection (forward selection and backward elimination) and three learn-
ing algorithms ( NB, J48, OneR) to find out the best learning scheme. The best
results are achieved for different datasets with different combinations of these pre-
processing, feature selection and learning algorithms. However, in their proposal,
there is no clear indication about which combination should be used for a partic-
ular dataset.
It is found in the most researches that the performance of cross-project defect
prediction is worse compared to within-project due to the differences of distri-
bution between source and target projects. In this Paper [15], the performance
of cross-project defect prediction has been evaluated from a different perspective
19
called cost-sensitive analysis using 9 Apache Software Foundation projects con-
sisting of 38 releases. Prediction models are built under Logistic Regression and
compared on the basis of AUC, Precision, F-measure and AUCEC (area under the
cost-effectiveness curve) measurement between cross-project and within-project.
The experiment shows that cross-project defeat prediction provides a good perfor-
mance like within-project and better one than random prediction if the resources
are constrained. HE et al. [16] investigates the effectiveness of the different pre-
dictors on a simplified metrics set for both within-project and cross-project defect
prediction. The authors proposed a selection technique including an evaluator
called CfsSubsetEval and a search algorithm named GreedyStepwise. The find-
ings of the experiment shows that the predictors with minimal metrics sets provide
better result and simple classifiers like Nave Bayes perform well in this context.
In order to improve the result of cross-project defect prediction a new novel
transfer learning approach has been proposed by Nam et al. [16] named TCA+
to select the proper normalization options for TCA. The result shows TCA+
outperforms the entire baseline and it is also comparable to within-project defect
prediction.
3.3 Classification
Various machine learning algorithms have been investigated in different ways to
find the best one that performs well in the respective context. Naıve Bayes, deci-
sion tree, logistic regression, neural networks, support vector machine are widely
used classifiers in the field of SDP.
Menzies et al. [6] used J48, OneR and Naıve Bays classifiers in their research
and found that Nave Bays performs better than others. Challagulla [17] analyzed
different classifiers and concluded that IBL (instance based learning) and 1R (1-
Rule) were in a better condition in respect of accuracy of finding bugs properly.
20
In [18], the authors investigated the statistical comparison of 22 classifiers in the
respect of AUC performance which indicated that the accuracy of these classifiers
of top 17 does not differ much unlike previous researches.
Besides, Five class imbalance learning methods that are Random undersam-
pling (RUS), the balanced version of random undersampling (RUS-bal), threshold-
moving (THM), AdaBoost.NC (BNC) and SMOTEBoost (SMB) have been stud-
ied in this paper [19] using two top-ranked classifiers Naıve Bayes and Random
Forest for the purpose of improving the performances of defect prediction. Ad-
aBoost.NC shows the best result in terms of balance, G-mean, and AU.
3.4 Summary
Different research works on software defect prediction have been gathered in this
chapter with a view to reviewing their methodology and results. We discussed
the previous researches into three categories: Pre-processing, Attribute Selection,
Classification. Though many attribute selection process have been proposed till
now, there exists some limitations of these works. Therefore, It leads us to propose
a new method which can produce better result in predicting the defects.
21
Chapter 4
Proposed Methodology
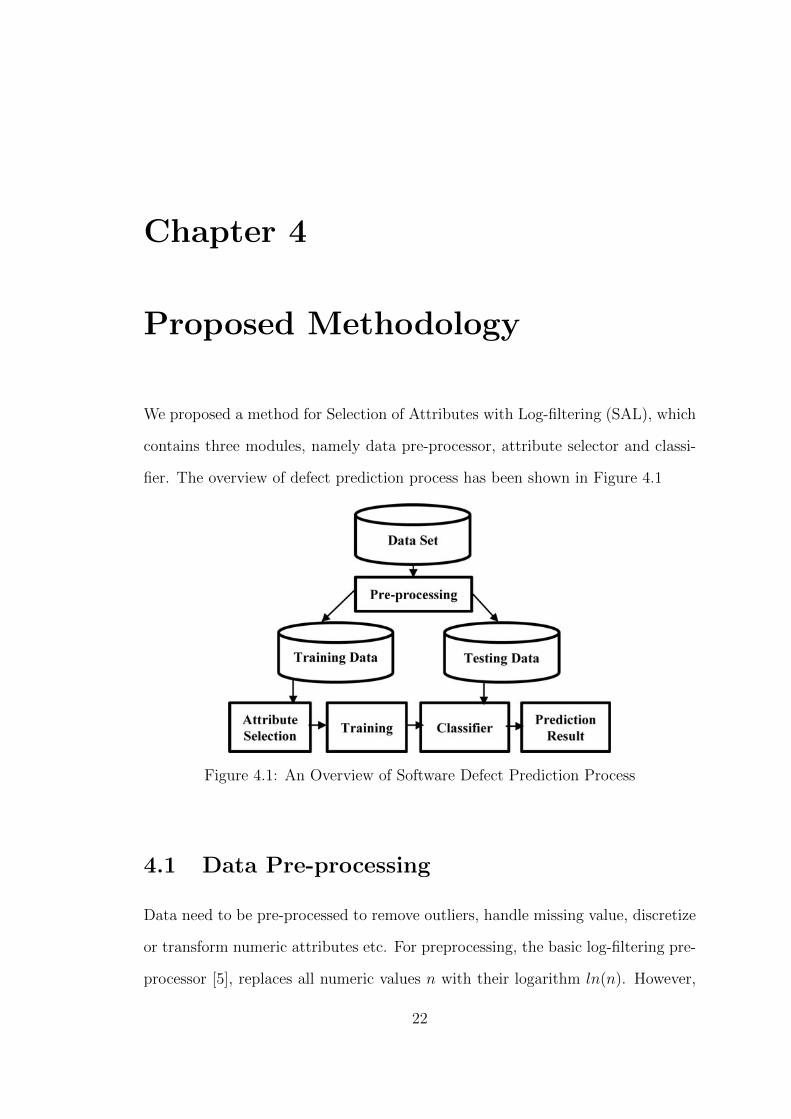
We proposed a method for Selection of Attributes with Log-filtering (SAL), which
contains three modules, namely data pre-processor, attribute selector and classi-
fier. The overview of defect prediction process has been shown in Figure 4.1
Figure 4.1: An Overview of Software Defect Prediction Process
4.1 Data Pre-processing
Data need to be pre-processed to remove outliers, handle missing value, discretize
or transform numeric attributes etc. For preprocessing, the basic log-filtering pre-
processor [5], replaces all numeric values n with their logarithm ln(n). However,
22
we use ln(n+∈) instead of ln(n), where ∈ is a small value and is set based on
rigorous experiment (Figure 5.1).
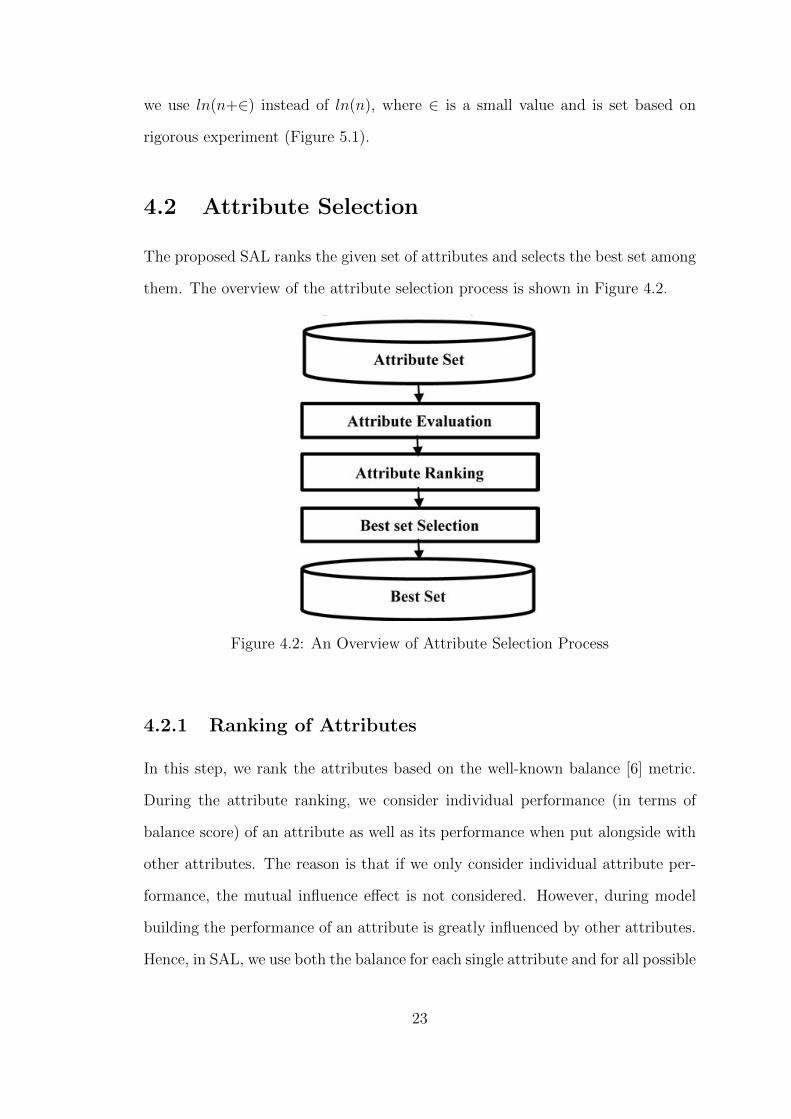
4.2 Attribute Selection
The proposed SAL ranks the given set of attributes and selects the best set among
them. The overview of the attribute selection process is shown in Figure 4.2.
Figure 4.2: An Overview of Attribute Selection Process
4.2.1 Ranking of Attributes
In this step, we rank the attributes based on the well-known balance [6] metric.
During the attribute ranking, we consider individual performance (in terms of
balance score) of an attribute as well as its performance when put alongside with
other attributes. The reason is that if we only consider individual attribute per-
formance, the mutual influence effect is not considered. However, during model
building the performance of an attribute is greatly influenced by other attributes.
Hence, in SAL, we use both the balance for each single attribute and for all possible
23

pairs of attributes. Following Algorithm 1, single attribute balance and pair-wise
attribute balance are put together to generate the total balance and we sort the
attribute based on total balance in descending order.
Algorithm 1 Attribute ranking
Input: Set of Attributes A = {a1, a2...., an}Output: Sorted attributes list As
1: for each ai ∈ A do2: Bi ⇐ balance for ai3: end for4: P ⇐ all possible pair wise combinations from A5: for each Pj ∈ P do6: Cj ⇐ balance for Pj
7: end for8: for each ai ∈ A do9: Di ⇐ average of all Cj where ai exists Pj
10: end for11: for each ai ∈ A do12: Ti ⇐ (Bi+Di)/213: end for14: Sort A in decreasing order using the corresponding values in T to obtain sorted
attribute list As
15: Return As
4.2.2 Selection of the Best Set of Attributes
The aim of this step is to determine the best set of attributes since all attributes
are not important for SDP. To do this, we use the sorted attribute list As from the
previous section. We denote the selected best set of attribute list by F . We assume
that top attribute in As to be the best among all attributes based on balance, and
initialize F to it (line 1 in Algorithm 2). Then, the second top ranked attribute
from As is tried to be added into F if it improves the balance of F (lines 5-8 in
Algorithm 2). This process is repeated for all the attributes in As sequentially
(line 3 in Algorithm 2), and finally we get the selected set of attributes in F .
24

Algorithm 2 Determination of the best set of attributes
Input: Sorted list A = {a1, a2...., an} of attributesOutput: Best set of attributes for SDP
1: F ⇐ a12: previousBalance ⇐ balance for F3: for all i = 2 to n do4: currentBalance ⇐ balance for F ∪ ai5: if currentBalance > previousBalance then6: currentBalance ⇐ previousBalance7: F ⇐ F ∪ ai8: end if9: end for
10: Return F
4.3 Classification
For classification, different learning algorithms like naıve bayes (NB) classifier,
multilayer perception (MLP), support vector machine (SVM), logistic regression
(LR), and k nearest neighbor (KNN) have been applied in SDP [6]. In our study,
we consider Nave Bayes, Decision Tree and Logistic Regression classifier to classify
the selected attributes.
The Naıve Bayes classifier is based on the Bayes theorem with independence
assumptions among predictors. Logistic Regression is a statistical method to anal-
yse dataset in which there are one or more independent variables that determine
an outcome. Besides, A decision tree is a decision support tool that uses a tree-
like graph or model of decisions and their possible consequences, including chance
event outcomes, resource costs.
4.4 Summary
This chapter explained our methodology of defect prediction process. We initiated
our chapter with the data pre-processing technique applied on the datasets. Then
we provided the details of the attribute selection process by describing algorithms
and discussed classifiers that has been used to build the prediction model.
25
Chapter 5
Experimental Results and
Discussion
In this section, we present the experimental evaluation of the proposed SAL in
comparison with other currently available methods for SDP. We first describe the
simulation setup including evaluation metrics and then present the experimental
results.
5.1 Evaluation Metrics
We have used Balance and AUC to measure the perfromance of prediction re-
sult.The equation for computing the balance according to [12, 6] is shown below
using (5.1).
balance = 1−√
(1− pd)2 + (0− pf)2√2
(5.1)
Another evaluation is the Receiver Operating Characteristic (ROC) curve
which provides a graphical visualization of the results. The Area Under the ROC
Curve (AUC) also provides a quality measure for classification problem [20].
26
5.2 Implementation Details
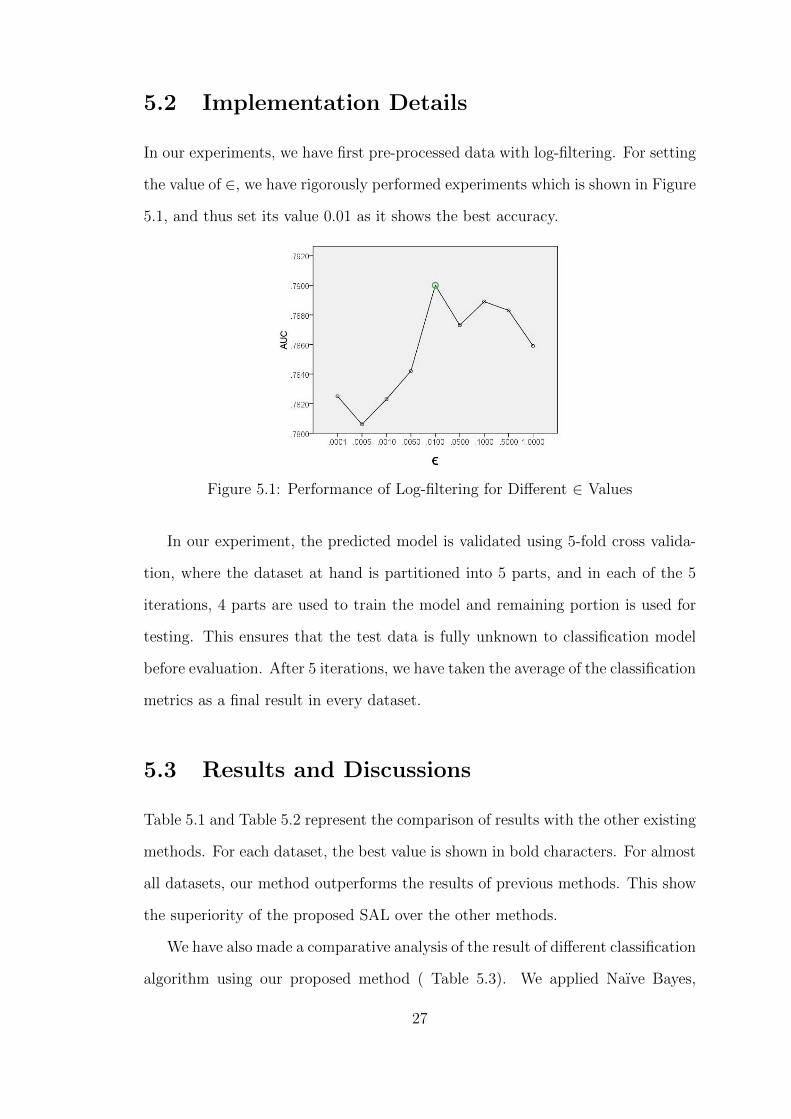
In our experiments, we have first pre-processed data with log-filtering. For setting
the value of ∈, we have rigorously performed experiments which is shown in Figure
5.1, and thus set its value 0.01 as it shows the best accuracy.
Figure 5.1: Performance of Log-filtering for Different ∈ Values
In our experiment, the predicted model is validated using 5-fold cross valida-
tion, where the dataset at hand is partitioned into 5 parts, and in each of the 5
iterations, 4 parts are used to train the model and remaining portion is used for
testing. This ensures that the test data is fully unknown to classification model
before evaluation. After 5 iterations, we have taken the average of the classification
metrics as a final result in every dataset.
5.3 Results and Discussions
Table 5.1 and Table 5.2 represent the comparison of results with the other existing
methods. For each dataset, the best value is shown in bold characters. For almost
all datasets, our method outperforms the results of previous methods. This show
the superiority of the proposed SAL over the other methods.
We have also made a comparative analysis of the result of different classification
algorithm using our proposed method ( Table 5.3). We applied Naıve Bayes,
27
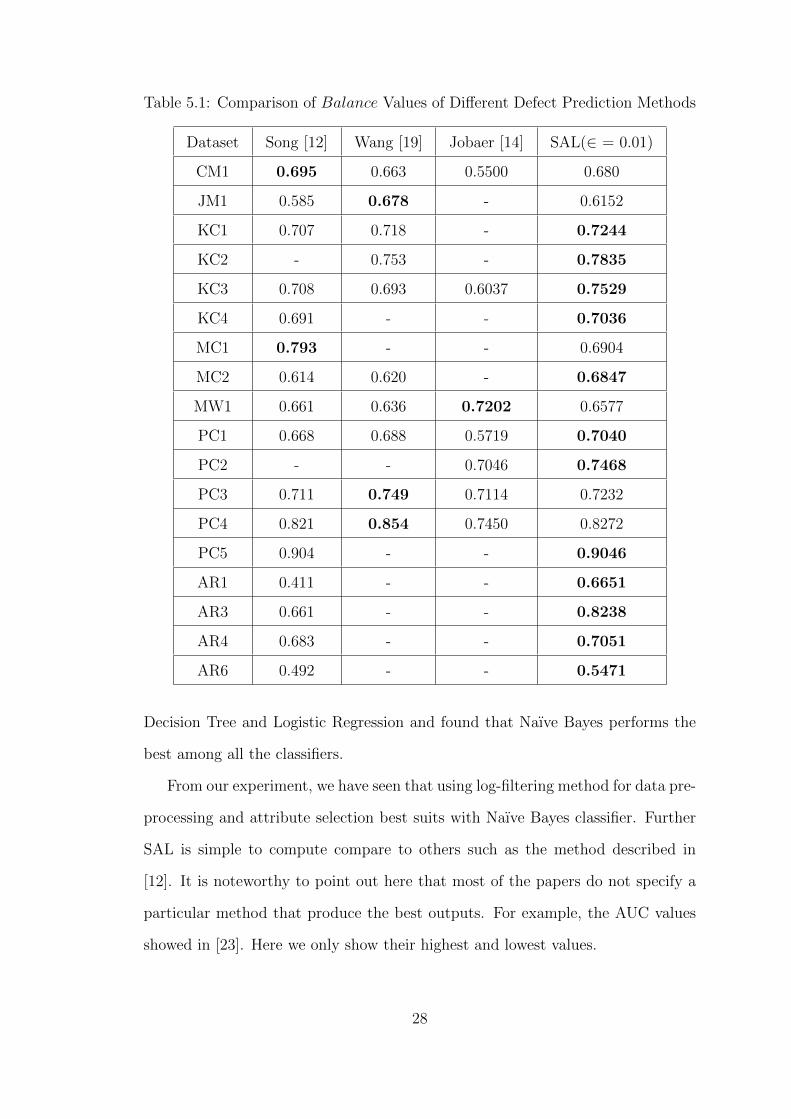
Table 5.1: Comparison of Balance Values of Different Defect Prediction Methods
Dataset Song [12] Wang [19] Jobaer [14] SAL(∈ = 0.01)
CM1 0.695 0.663 0.5500 0.680
JM1 0.585 0.678 - 0.6152
KC1 0.707 0.718 - 0.7244
KC2 - 0.753 - 0.7835
KC3 0.708 0.693 0.6037 0.7529
KC4 0.691 - - 0.7036
MC1 0.793 - - 0.6904
MC2 0.614 0.620 - 0.6847
MW1 0.661 0.636 0.7202 0.6577
PC1 0.668 0.688 0.5719 0.7040
PC2 - - 0.7046 0.7468
PC3 0.711 0.749 0.7114 0.7232
PC4 0.821 0.854 0.7450 0.8272
PC5 0.904 - - 0.9046
AR1 0.411 - - 0.6651
AR3 0.661 - - 0.8238
AR4 0.683 - - 0.7051
AR6 0.492 - - 0.5471
Decision Tree and Logistic Regression and found that Naıve Bayes performs the
best among all the classifiers.
From our experiment, we have seen that using log-filtering method for data pre-
processing and attribute selection best suits with Naıve Bayes classifier. Further
SAL is simple to compute compare to others such as the method described in
[12]. It is noteworthy to point out here that most of the papers do not specify a
particular method that produce the best outputs. For example, the AUC values
showed in [23]. Here we only show their highest and lowest values.
28
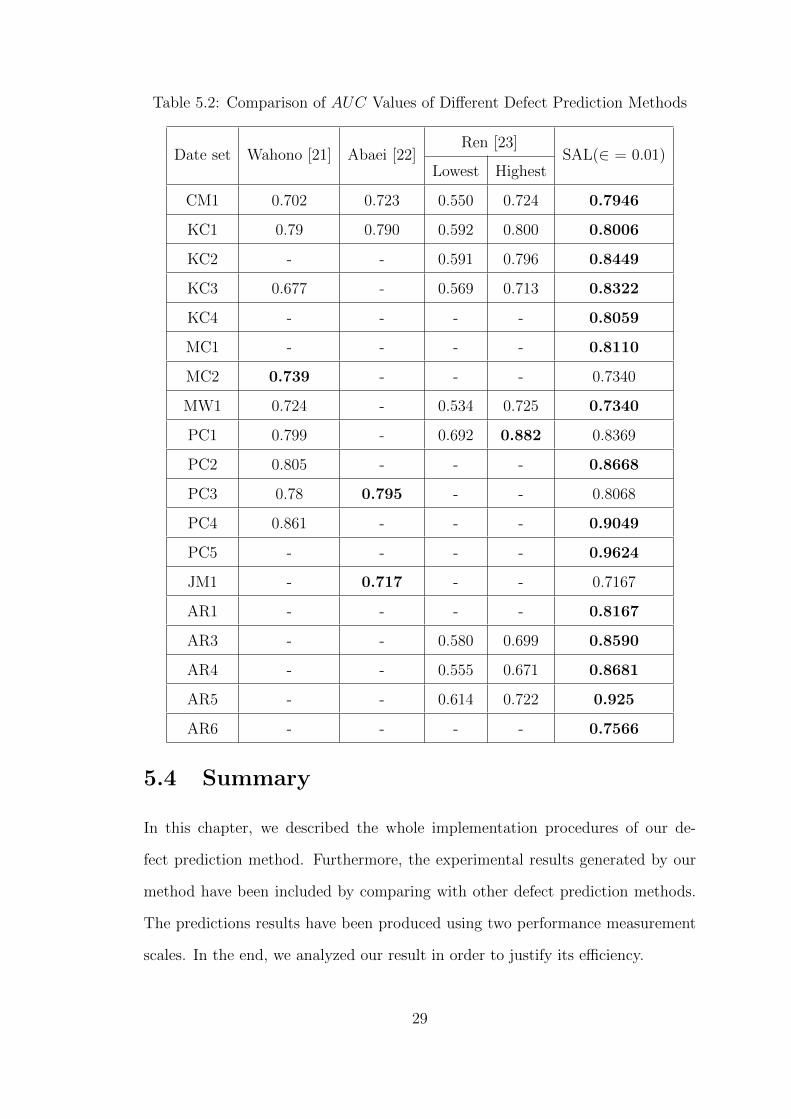
Table 5.2: Comparison of AUC Values of Different Defect Prediction Methods
Date set Wahono [21] Abaei [22]Ren [23]
SAL(∈ = 0.01)Lowest Highest
CM1 0.702 0.723 0.550 0.724 0.7946
KC1 0.79 0.790 0.592 0.800 0.8006
KC2 - - 0.591 0.796 0.8449
KC3 0.677 - 0.569 0.713 0.8322
KC4 - - - - 0.8059
MC1 - - - - 0.8110
MC2 0.739 - - - 0.7340
MW1 0.724 - 0.534 0.725 0.7340
PC1 0.799 - 0.692 0.882 0.8369
PC2 0.805 - - - 0.8668
PC3 0.78 0.795 - - 0.8068
PC4 0.861 - - - 0.9049
PC5 - - - - 0.9624
JM1 - 0.717 - - 0.7167
AR1 - - - - 0.8167
AR3 - - 0.580 0.699 0.8590
AR4 - - 0.555 0.671 0.8681
AR5 - - 0.614 0.722 0.925
AR6 - - - - 0.7566
5.4 Summary
In this chapter, we described the whole implementation procedures of our de-
fect prediction method. Furthermore, the experimental results generated by our
method have been included by comparing with other defect prediction methods.
The predictions results have been produced using two performance measurement
scales. In the end, we analyzed our result in order to justify its efficiency.
29
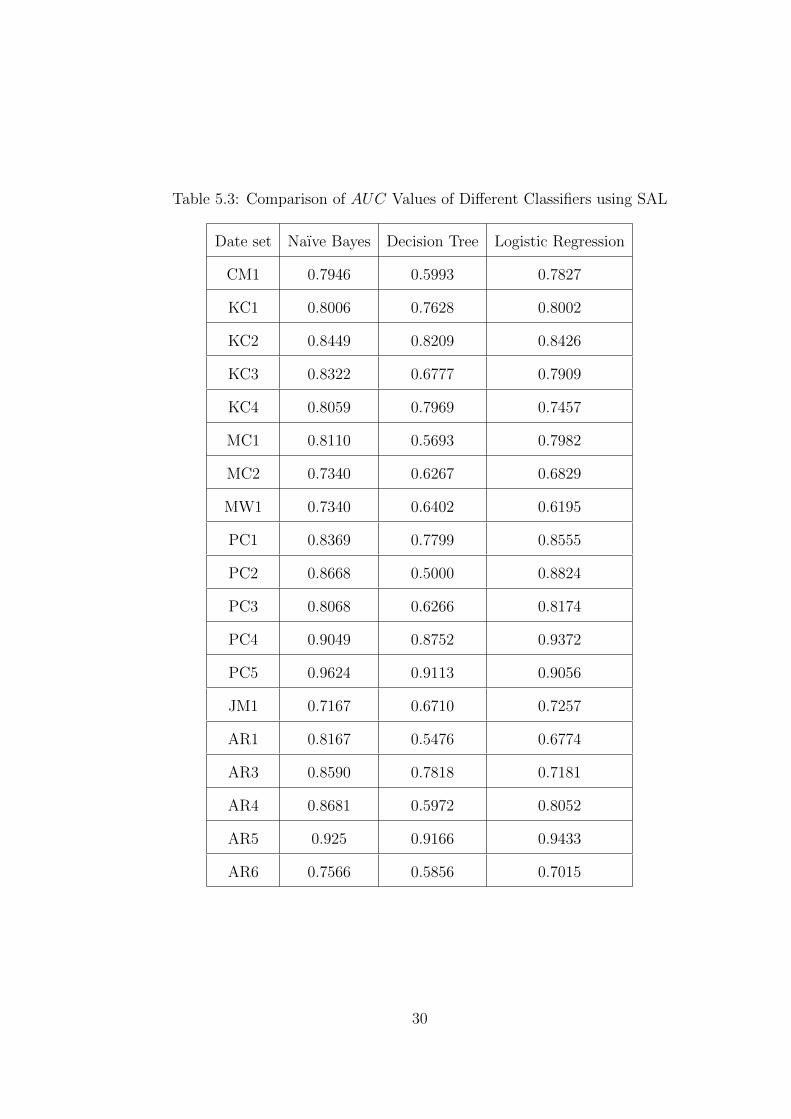
Table 5.3: Comparison of AUC Values of Different Classifiers using SAL
Date set Naıve Bayes Decision Tree Logistic Regression
CM1 0.7946 0.5993 0.7827
KC1 0.8006 0.7628 0.8002
KC2 0.8449 0.8209 0.8426
KC3 0.8322 0.6777 0.7909
KC4 0.8059 0.7969 0.7457
MC1 0.8110 0.5693 0.7982
MC2 0.7340 0.6267 0.6829
MW1 0.7340 0.6402 0.6195
PC1 0.8369 0.7799 0.8555
PC2 0.8668 0.5000 0.8824
PC3 0.8068 0.6266 0.8174
PC4 0.9049 0.8752 0.9372
PC5 0.9624 0.9113 0.9056
JM1 0.7167 0.6710 0.7257
AR1 0.8167 0.5476 0.6774
AR3 0.8590 0.7818 0.7181
AR4 0.8681 0.5972 0.8052
AR5 0.925 0.9166 0.9433
AR6 0.7566 0.5856 0.7015
30
Chapter 6
Conclusion
At present defect prediction has become one of the most important research topics
in the field of software engineering. For improving the prediction result, we need
to find the standard sets of attributes which is a very challenging task. There-
fore,exploring the best sets of attributes for training the classifiers has become one
of the key issues in SDP.
In our thesis, we have proposed an attribute selection method which includes
ranking of attributes and then selecting the best set. Our ranking technique is
built based on the balances of different combinations of attributes.From this or-
dered attributes, we finally determine our best group of attributes.We compared
the performance of our technique using Balance and AUC measurement scales.
For classification, we have used Nave Bayes, Decision Tree and Logistic Regres-
sion algorithm to train our datasets. In our proposed method we considered the
influence of one attribute over another one using their combinations as the at-
tributes have dependency among them. The influence of paired attributes while
ranking them has not taken into concern in other existing methods. However, we
only calculated the value of pair-wise combinations instead of all combinations to
avoid the complexity.According to the results of experiment, our proposed SAL
provides better accuracy of prediction.
31
Our thesis work considered only eighteen datasets for defect prediction. In
future, we will expand our work using other publicly available datasets for ex-
periment which will strengthen the efficiency of our method. Apart from nave
bayes, we want to study the performances of other classifiers to improve our re-
sult. Moreover, we have a plan to apply our proposed method for cross-project
defect prediction.
32

Bibliography
[1] K. Gao, T. M. Khoshgoftaar, H. Wang, and N. Seliya, “Choosing softwaremetrics for defect prediction: an investigation on feature selection tech-niques,” Software: Practice and Experience, vol. 41, no. 5, pp. 579–606, 2011.
[2] H. Wang, T. M. Khoshgoftaar, and N. Seliya, “How many software metricsshould be selected for defect prediction?,” in FLAIRS Conference, 2011.
[3] H. Wang, T. M. Khoshgoftaar, and J. Van Hulse, “A comparative study ofthreshold-based feature selection techniques,” in Granular Computing (GrC),2010 IEEE International Conference on, pp. 499–504, IEEE, 2010.
[4] K. Gao, T. M. Khoshgoftaar, and H. Wang, “An empirical investigation offilter attribute selection techniques for software quality classification,” in In-formation Reuse & Integration, 2009. IRI’09. IEEE International Conferenceon, pp. 272–277, IEEE, 2009.
[5] K. O. Elish and M. O. Elish, “Predicting defect-prone software modules usingsupport vector machines,” Journal of Systems and Software, vol. 81, no. 5,pp. 649–660, 2008.
[6] T. Menzies, J. Greenwald, and A. Frank, “Data mining static code attributesto learn defect predictors,” Software Engineering, IEEE Transactions on,vol. 33, no. 1, pp. 2–13, 2007.
[7] M. Shepperd, Q. Song, Z. Sun, and C. Mair, “Data quality: Some commentson the nasa software defect datasets,” Software Engineering, IEEE Transac-tions on, vol. 39, no. 9, pp. 1208–1215, 2013.
[8] D. Gray, D. Bowes, N. Davey, Y. Sun, and B. Christianson, “The misuse ofthe nasa metrics data program data sets for automated software defect pre-diction,” in Evaluation & Assessment in Software Engineering (EASE 2011),15th Annual Conference on, pp. 96–103, IET, 2011.
[9] J. Yang and V. Honavar, “Feature subset selection using a genetic algorithm,”in Feature extraction, construction and selection, pp. 117–136, Springer, 1998.
[10] J. Nam, S. J. Pan, and S. Kim, “Transfer defect learning,” in Proceedingsof the 2013 International Conference on Software Engineering, pp. 382–391,IEEE Press, 2013.
33
[11] D. Gray, D. Bowes, N. Davey, Y. Sun, and B. Christianson, “Using the sup-port vector machine as a classification method for software defect predictionwith static code metrics,” in Engineering Applications of Neural Networks,pp. 223–234, Springer, 2009.
[12] Q. Song, Z. Jia, M. Shepperd, S. Ying, and S. Y. J. Liu, “A general soft-ware defect-proneness prediction framework,” Software Engineering, IEEETransactions on, vol. 37, no. 3, pp. 356–370, 2011.
[13] B. Turhan and A. Bener, “A multivariate analysis of static code attributes fordefect prediction,” in Quality Software, 2007. QSIC’07. Seventh InternationalConference on, pp. 231–237, IEEE, 2007.
[14] J. Khan, A. U. Gias, M. S. Siddik, M. H. Rahman, S. M. Khaled, M. Shoyaib,et al., “An attribute selection process for software defect prediction,” in In-formatics, Electronics & Vision (ICIEV), 2014 International Conference on,pp. 1–4, IEEE, 2014.
[15] F. Rahman, D. Posnett, and P. Devanbu, “Recalling the imprecision of cross-project defect prediction,” in Proceedings of the ACM SIGSOFT 20th In-ternational Symposium on the Foundations of Software Engineering, p. 61,ACM, 2012.
[16] P. He, B. Li, X. Liu, J. Chen, and Y. Ma, “An empirical study on softwaredefect prediction with a simplified metric set,” Information and SoftwareTechnology, vol. 59, pp. 170–190, 2015.
[17] V. U. B. Challagulla, F. B. Bastani, I.-L. Yen, and R. A. Paul, “Empiricalassessment of machine learning based software defect prediction techniques,”International Journal on Artificial Intelligence Tools, vol. 17, no. 02, pp. 389–400, 2008.
[18] S. Lessmann, B. Baesens, C. Mues, and S. Pietsch, “Benchmarking classi-fication models for software defect prediction: A proposed framework andnovel findings,” Software Engineering, IEEE Transactions on, vol. 34, no. 4,pp. 485–496, 2008.
[19] S. Wang and X. Yao, “Using class imbalance learning for software defectprediction,” Reliability, IEEE Transactions on, vol. 62, no. 2, pp. 434–443,2013.
[20] T. Fawcett, “An introduction to roc analysis,” Pattern recognition letters,vol. 27, no. 8, pp. 861–874, 2006.
[21] R. S. Wahono and N. S. Herman, “Genetic feature selection for software defectprediction,” Advanced Science Letters, vol. 20, no. 1, pp. 239–244, 2014.
[22] G. Abaei and A. Selamat, “A survey on software fault detection based on dif-ferent prediction approaches,” Vietnam Journal of Computer Science, vol. 1,no. 2, pp. 79–95, 2014.
34

[23] J. Ren, K. Qin, Y. Ma, and G. Luo, “On software defect prediction usingmachine learning,” Journal of Applied Mathematics, vol. 2014, 2014.
35





























