Embed Size (px)
Citation preview

17 July 2015
UAVs – Intern Project SummaryNetworks and Systems
David Minn
UAV’s – Intern Project Summary
Contents
1. UAV Background
2. Blockers
3. Project
- Opportunities
- Application
- Structural Design
- System Design
4. Testing and Data Analysis
5. The Future
6. Highlights
UAV’s – Intern Project Summary
The Names
• UAV - Unmanned Aerial Vehicle (Often referred to by academic researchers)
• Drone (Most commonly used by the media and recognised by the public but for commercial applications has negative connotations)
• UAS - Unmanned Aircraft System (Referred to within CAA regulations)• SUA – Small Unmanned Aircraft (The acronym currently preferred by
the CAA)• RPAS - Remotely Piloted Aerial System (Now used across Europe
within the context of a proposed new regulatory system)
UAVs are not a survey technology but a remotely controlled, low aerial platform for carrying a wide range of sensors.
A lot of different names are used to describe the system:
UAV’s – Intern Project Summary
What is a UAV?
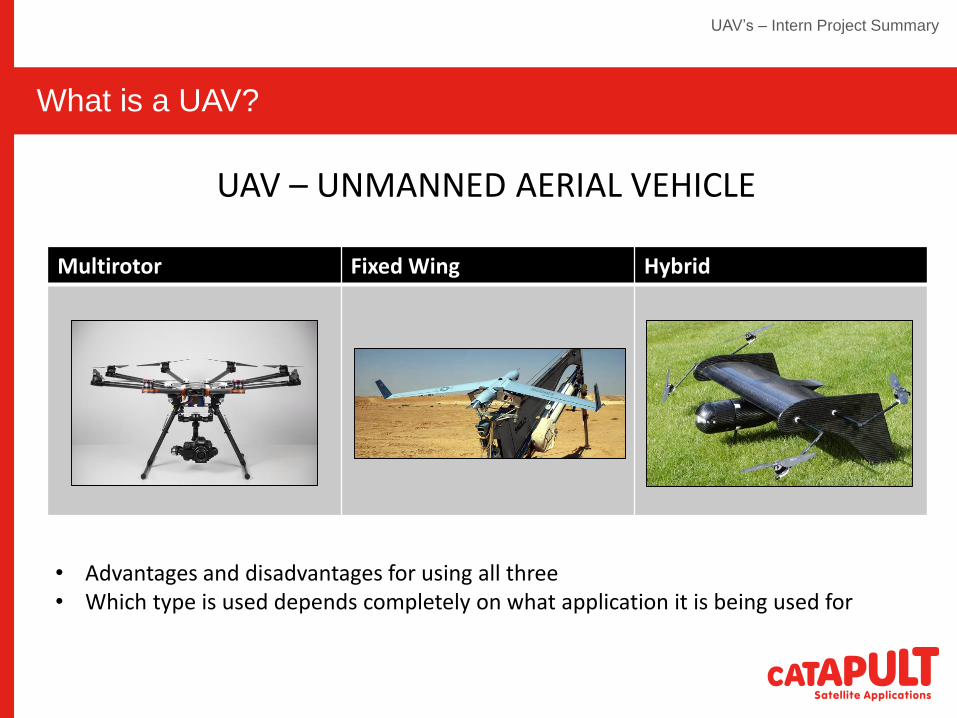
UAV – UNMANNED AERIAL VEHICLE
Multirotor Fixed Wing Hybrid
• Advantages and disadvantages for using all three• Which type is used depends completely on what application it is being used for
UAV’s – Intern Project Summary
What is a UAV?
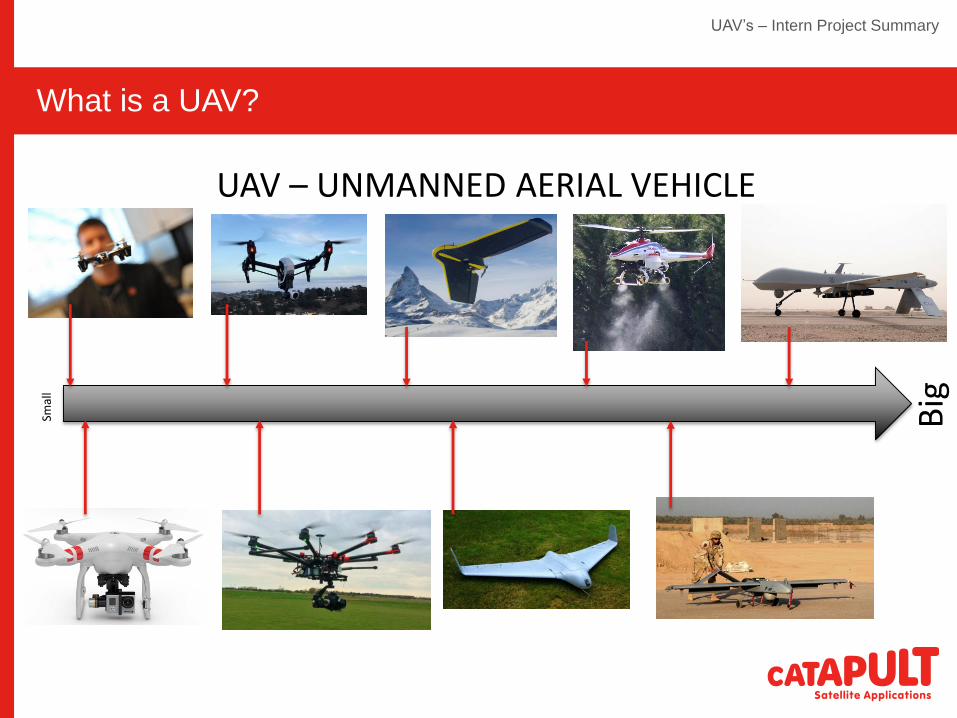
UAV – UNMANNED AERIAL VEHICLE
Smal
l
Big

UAV’s – Intern Project Summary
Why UAVs?
Earth Observation Satellite Communication Satellite Navigation
• Refine and complement Data
• Military UAVs use SatComms
• Deployable commsunit
• Robust Positioning• Uses GPS for flight
positioning
General Transferrable Skills
• GNSS Expertise• Data Processing• Machine to Machine• System design (power, weight, payload)• Data fusion
UAV’s – Intern Project Summary
Why UAVs?
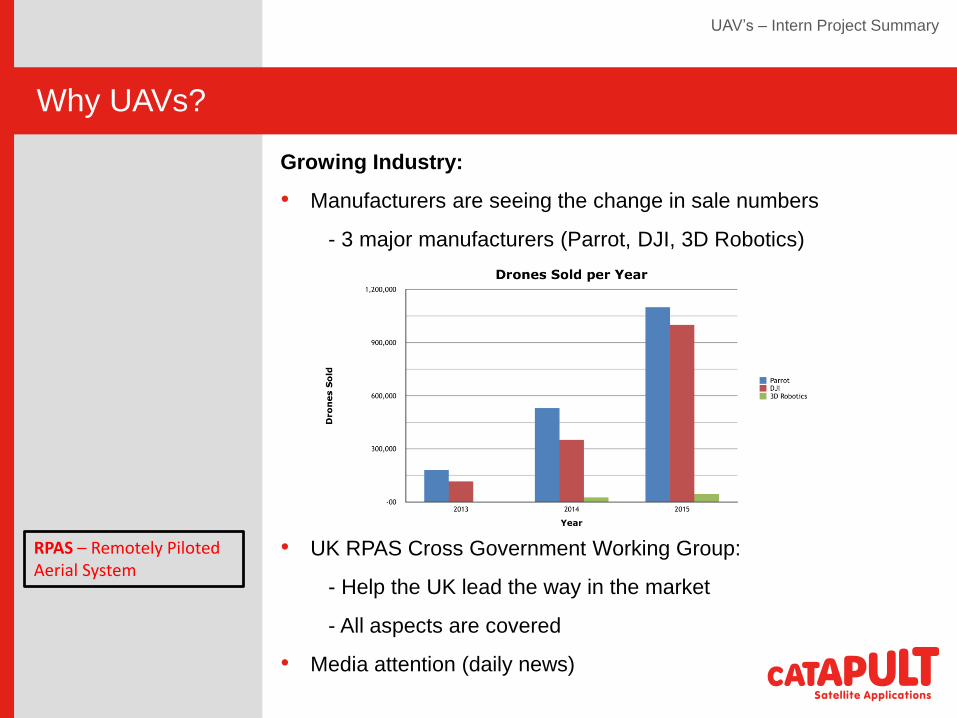
Growing Industry:
• Manufacturers are seeing the change in sale numbers
- 3 major manufacturers (Parrot, DJI, 3D Robotics)
• UK RPAS Cross Government Working Group:
- Help the UK lead the way in the market
- All aspects are covered
• Media attention (daily news)
RPAS – Remotely Piloted Aerial System
UAV’s – Intern Project Summary
Rules and Regulations
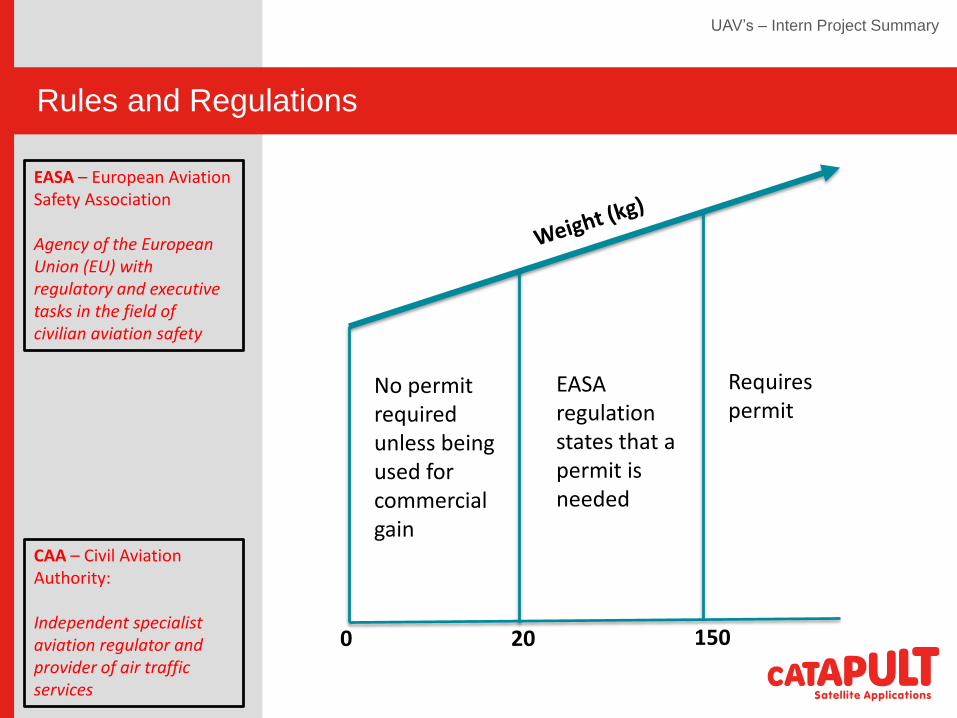
CAA – Civil Aviation Authority:
Independent specialist aviation regulator and provider of air traffic services
EASA – European Aviation Safety Association
Agency of the European Union (EU) with regulatory and executive tasks in the field of civilian aviation safety
0 20 150
No permit required unless being used for commercial gain
Requires permit
EASA regulation states that a permit is needed
UAV’s – Intern Project Summary
Rules and Regulations
Why is training required and why are rules necessary?
UAV’s – Intern Project Summary
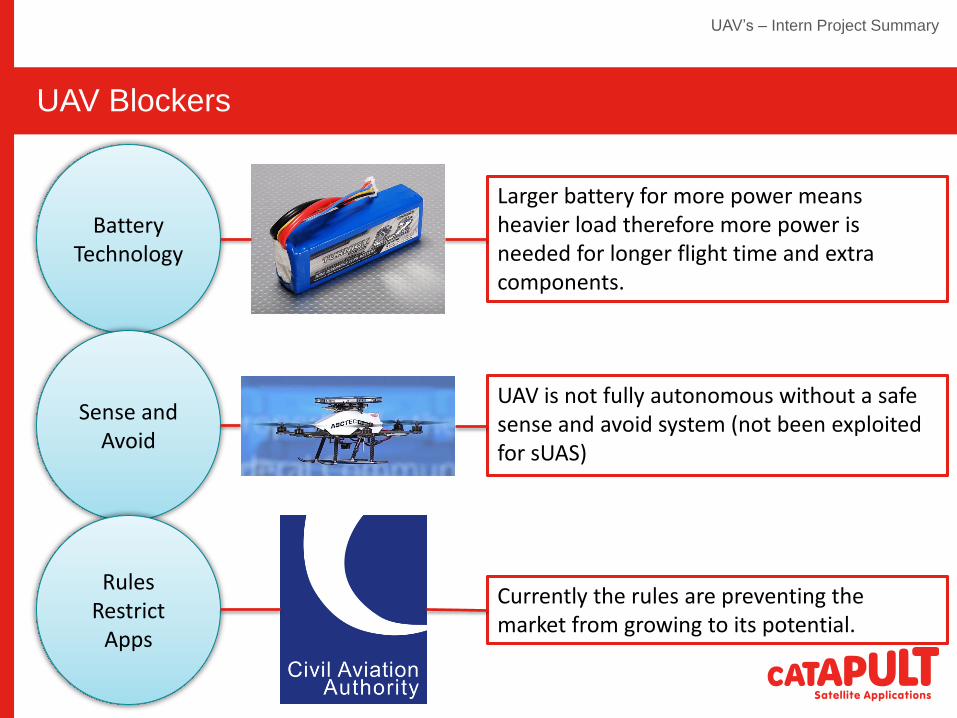
UAV Blockers
Battery Technology
Larger battery for more power means heavier load therefore more power is needed for longer flight time and extra components.
Sense and Avoid
Rules Restrict
Apps
Currently the rules are preventing the market from growing to its potential.
UAV is not fully autonomous without a safe sense and avoid system (not been exploited for sUAS)

UAV’s – Intern Project Summary
Project Outline
Market opportunity – Read around the current UAV applications
that exist worldwide
UAV Concept – Come up with and finalise an idea for the UAV
(Must be a multirotor)
Design Phase – Use CAD software to design the structure and
calculate the necessary electrical components for the system.
Integration/Assembly – Combine all the system components and
put them on to the frame.
Test plan – Create a plan for the chosen application
Flight testing and mission validation – Test the application and
conclude the project.

UAV’s – Intern Project Summary
UAV Opportunities
ApplicationsAgriculture
Archaeology
Journalism
Delivery
Humanitarian Work
MilitaryMapping
Photography
UAV’s – Intern Project Summary
Current Examples – Visual Working
UAV’s – Intern Project Summary
Events
• Commercial UAV Show• Advanced Engineering Show • SUAS – Enforcement Tool or Security
Threat• KTN/ARPAS RPAS Conference• UAVs - Unravelling the Mystery
Information:
• More case studies• Some industries are looking at ways of using UAVs whilst others have genuine
problems that can be addressed by the use of UAVs• Agriculture is a major player in the industry • Network Rail could use their closed environment to show safe usage of UAVs• Rules need to change for the industry to thrive
UAV’s – Intern Project Summary
Agricultural Findings – Elms Farm
Elms Farm:- Located between Grove and Wantage- 300 Hectares (420 full sized football pitches)- Produce wheat, barley and beans.- Farmer – Robert Benson
Key Facts:- Weather dependent- Agronomist comes once a week for an hour (Not enough time) –
Recommends chemicals- Every 5 years a soil sample will be taken at the same GPS point on the farm- Hard to monitor the whole farm as its too big- Target specific areas (2 hectares rather than 50)- Problems that farm encounters:
- Rust- Mildew- Yellow rust- Slugs(These can take out crops in a few days if not spotted)
UAV’s – Intern Project Summary
Application
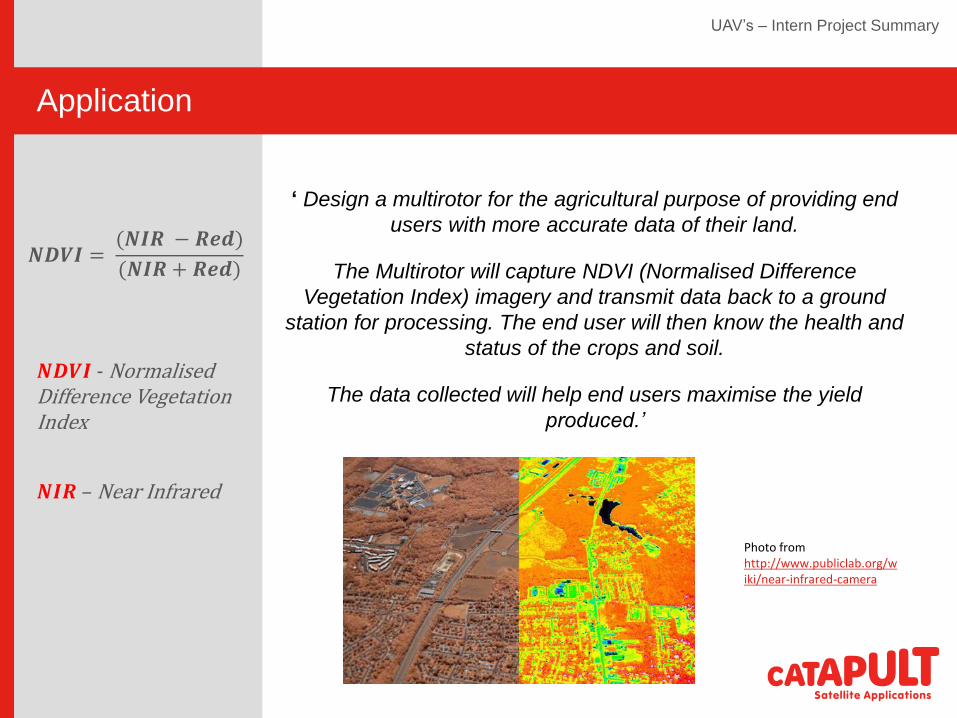
𝑵𝑫𝑽𝑰 =(𝑵𝑰𝑹 − 𝑹𝒆𝒅)
(𝑵𝑰𝑹 + 𝑹𝒆𝒅)
‘ Design a multirotor for the agricultural purpose of providing end
users with more accurate data of their land.
The Multirotor will capture NDVI (Normalised Difference
Vegetation Index) imagery and transmit data back to a ground
station for processing. The end user will then know the health and
status of the crops and soil.
The data collected will help end users maximise the yield
produced.’
Photo from http://www.publiclab.org/wiki/near-infrared-camera
𝑵𝑫𝑽𝑰 - Normalised Difference Vegetation Index
𝑵𝑰𝑹 – Near Infrared
UAV’s – Intern Project Summary
Application
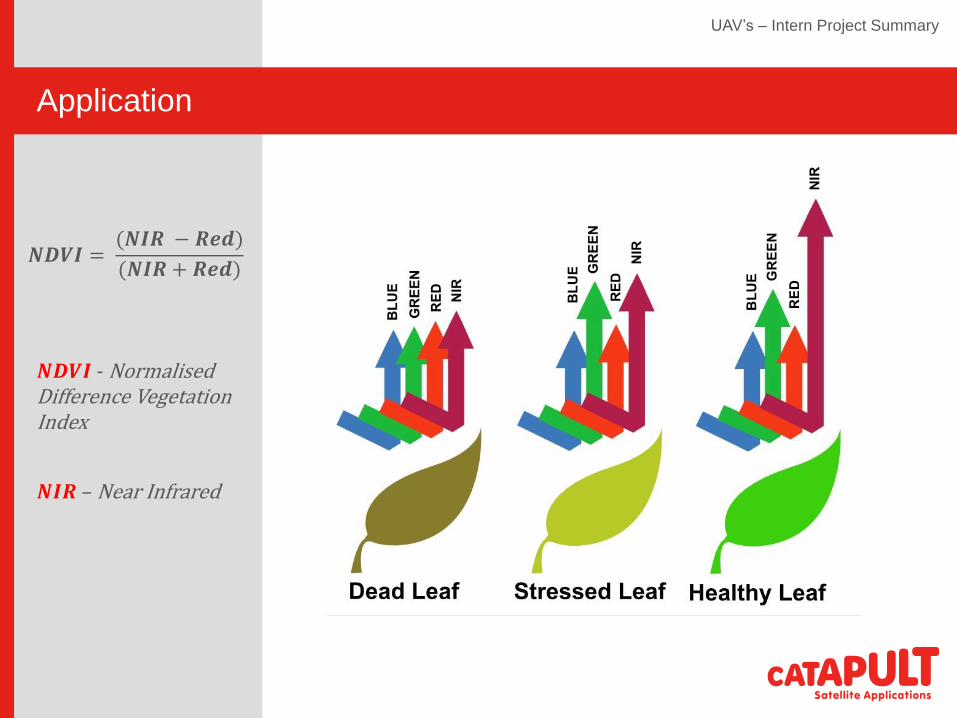
𝑵𝑫𝑽𝑰 =(𝑵𝑰𝑹 − 𝑹𝒆𝒅)
(𝑵𝑰𝑹 + 𝑹𝒆𝒅)
𝑵𝑫𝑽𝑰 - Normalised Difference Vegetation Index
𝑵𝑰𝑹 – Near Infrared

UAV’s – Intern Project Summary
Structural Design
• Designed on SolidWorks (multiple iterations)
• Hexacopter (6 motors)
• Built from Carbon fibre sheets and tubes (Dremel used)
• 3D printed connectors (Carbon Fibre PLA)
• Metal and plastic screws
• Nylon Spacers
PLA – Polyactic Acid – Thermoplastic
UAV’s – Intern Project Summary
Structural Design
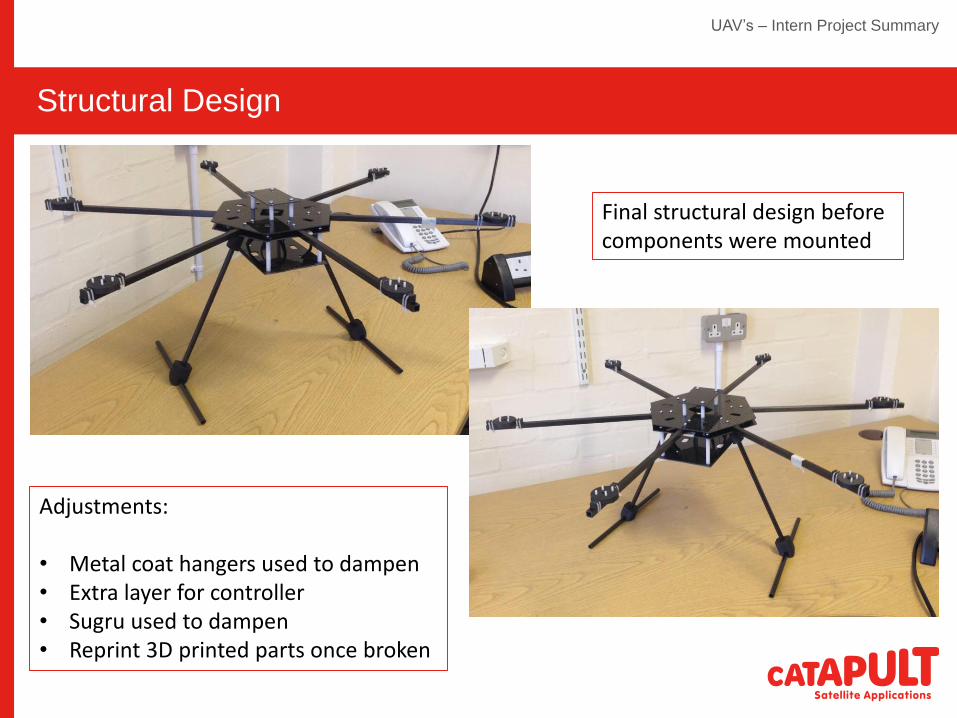
Adjustments:
• Metal coat hangers used to dampen• Extra layer for controller• Sugru used to dampen• Reprint 3D printed parts once broken
Final structural design before components were mounted
UAV’s – Intern Project Summary
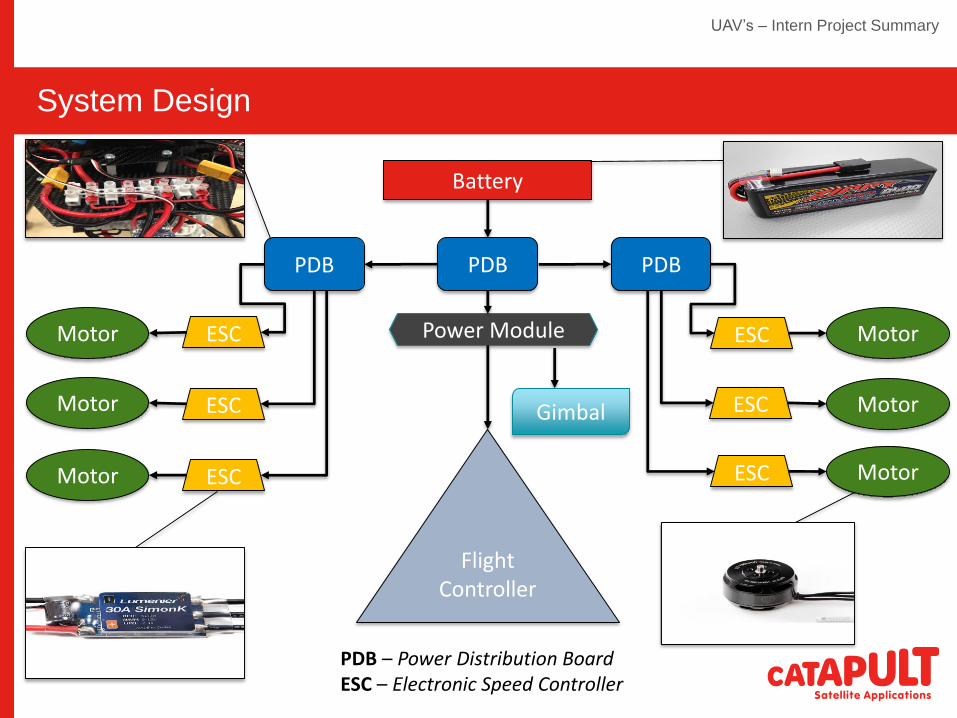
System Design
Battery
PDB PDB PDB
ESC
ESC
ESC ESC
ESC
ESCMotor Motor
Motor
Motor
Motor
Motor
Power Module
Flight Controller
PDB – Power Distribution BoardESC – Electronic Speed Controller
Gimbal
UAV’s – Intern Project Summary
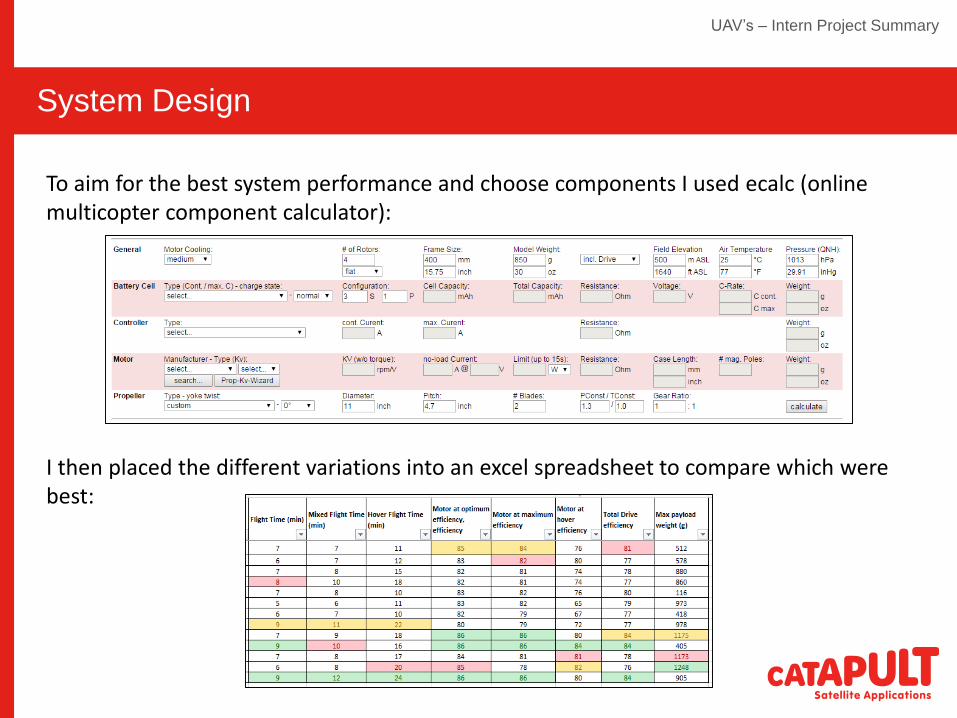
System Design
To aim for the best system performance and choose components I used ecalc (online multicopter component calculator):
I then placed the different variations into an excel spreadsheet to compare which were best:
UAV’s – Intern Project Summary
System Design
• I based my choice of components on the outcome that my spreadsheet provided me with and a few other factors.
• Waterproof motors were chosen as they can be used outside in any weather condition.
• The use of light components was necessary to provide a balance between power and weight.
• Each component was checked to make sure that the voltage and current boundaries were compatible with one another.
• A calculation was made to estimate that the battery would last 14 minutes
Equation:
𝐵𝑎𝑡𝑡𝑒𝑟𝑦 𝐶𝑎𝑝𝑎𝑐𝑖𝑡𝑦 (𝑚𝐴ℎ)
𝐿𝑜𝑎𝑑 (𝑚𝐴)= 𝐹𝑙𝑖𝑔ℎ𝑡 𝑡𝑖𝑚𝑒 (ℎ)
UAV’s – Intern Project Summary
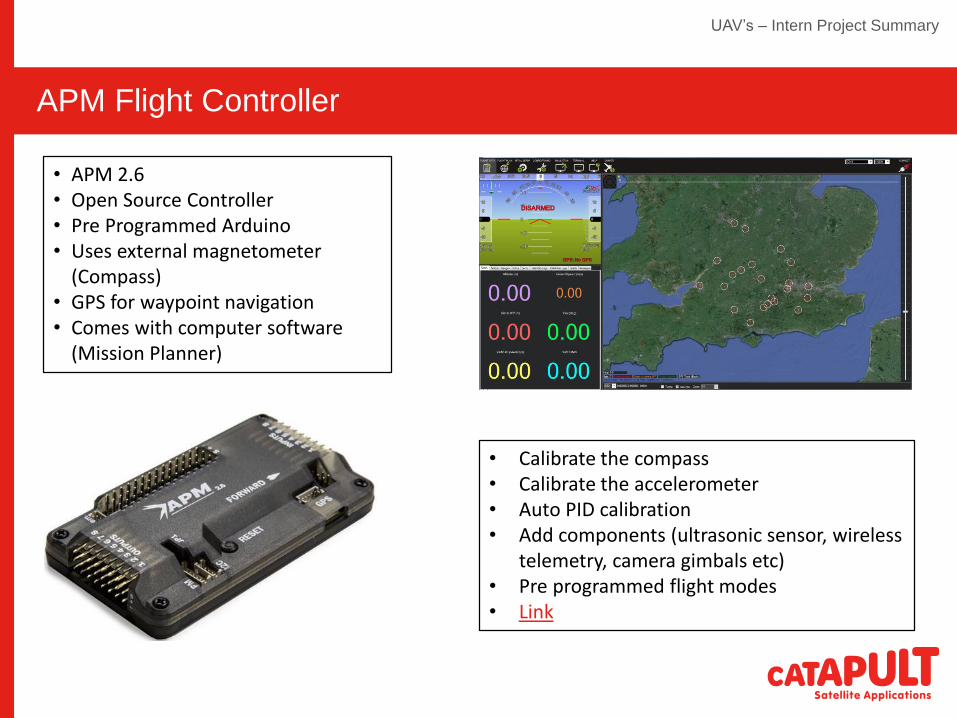
APM Flight Controller
• APM 2.6• Open Source Controller• Pre Programmed Arduino• Uses external magnetometer
(Compass)• GPS for waypoint navigation• Comes with computer software
(Mission Planner)
• Calibrate the compass• Calibrate the accelerometer• Auto PID calibration• Add components (ultrasonic sensor, wireless
telemetry, camera gimbals etc)• Pre programmed flight modes• Link
UAV’s – Intern Project Summary
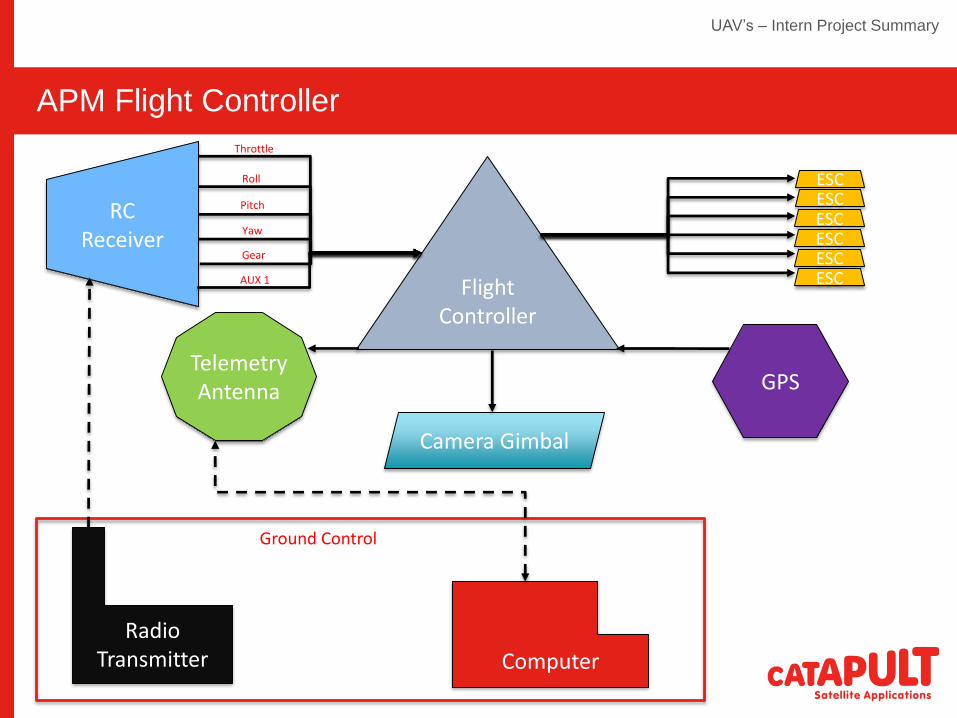
APM Flight Controller
Flight Controller
ESCESCESCESCESCESC
GPS
RC Receiver
Throttle
Roll
Pitch
Yaw
Gear
AUX 1
Telemetry Antenna
Radio Transmitter Computer
Ground Control
Camera Gimbal

UAV’s – Intern Project Summary
Final Prototype Design

UAV’s – Intern Project Summary
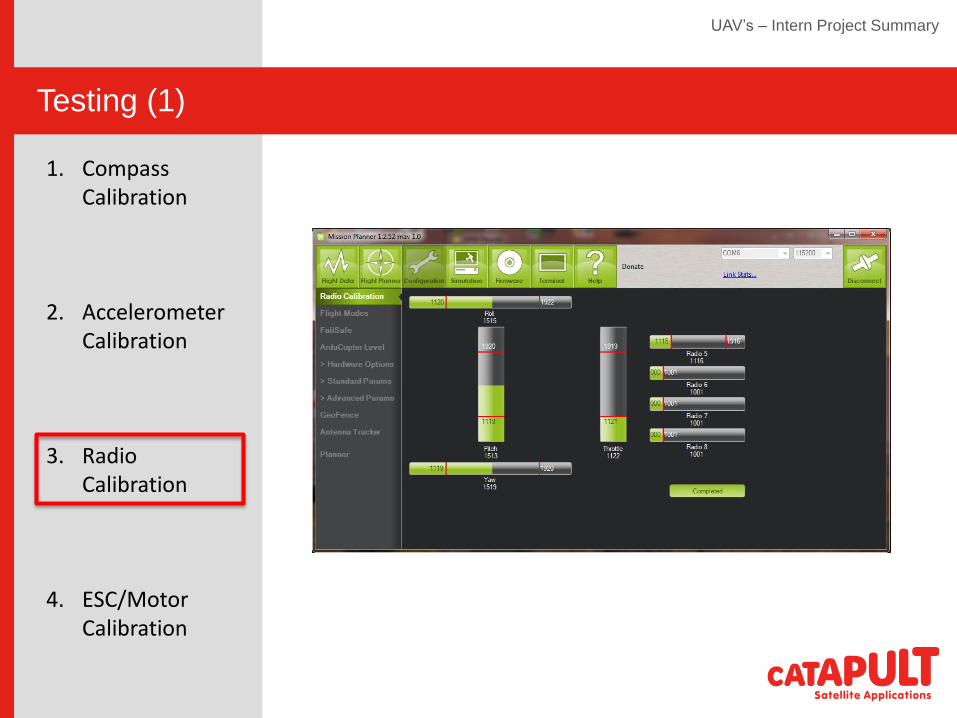
Testing (1)
1. Compass Calibration
2. Accelerometer Calibration
3. Radio Calibration
4. ESC/Motor Calibration

UAV’s – Intern Project Summary
Testing (1)
1. Compass Calibration
2. Accelerometer Calibration
3. Radio Calibration
4. ESC/Motor Calibration
UAV’s – Intern Project Summary
Testing (1)
1. Compass Calibration
2. Accelerometer Calibration
3. Radio Calibration
4. ESC/Motor Calibration

UAV’s – Intern Project Summary
Testing (1)
1. Compass Calibration
2. Accelerometer Calibration
3. Radio Calibration
4. ESC/Motor Calibration
UAV’s – Intern Project Summary
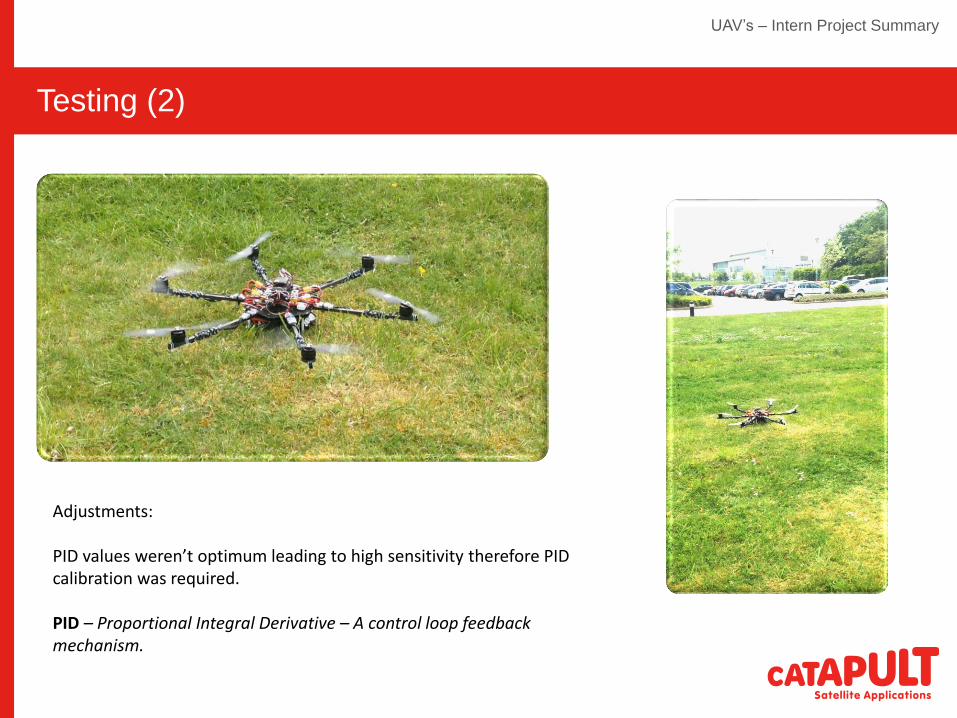
Testing (2)
Adjustments:
PID values weren’t optimum leading to high sensitivity therefore PID calibration was required.
PID – Proportional Integral Derivative – A control loop feedback mechanism.

UAV’s – Intern Project Summary
Testing (3)
Adjustments:
Legs were added with vibration absorption. Controller adjusted to compensate for PID values. 3D printed motor holder snapped. Camera needed to be added.

UAV’s – Intern Project Summary
Camera
• GoPro Hero3 White edition- Light- Durable- Adjustable- Wifi Enabled- Separate internal battery
• Modify with InfraBlue lens- Take GoPro apart- Remove Fisheye lens- Replace with new lens
Attach GoPro to stabilising gimbal!

UAV’s – Intern Project Summary
Farm Test
• Elms Farm• Conditions: Hot and Windy• Problems: Battery and Wind• Imagery attained• Crashes
UAV’s – Intern Project Summary
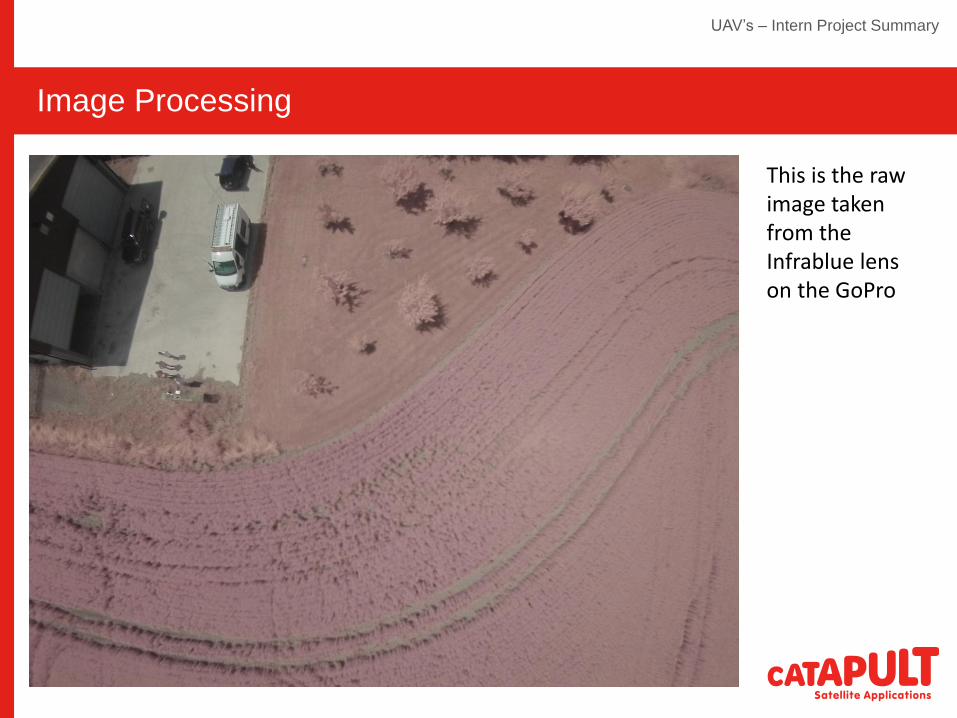
Image Processing
This is the raw image taken from the Infrablue lens on the GoPro
UAV’s – Intern Project Summary
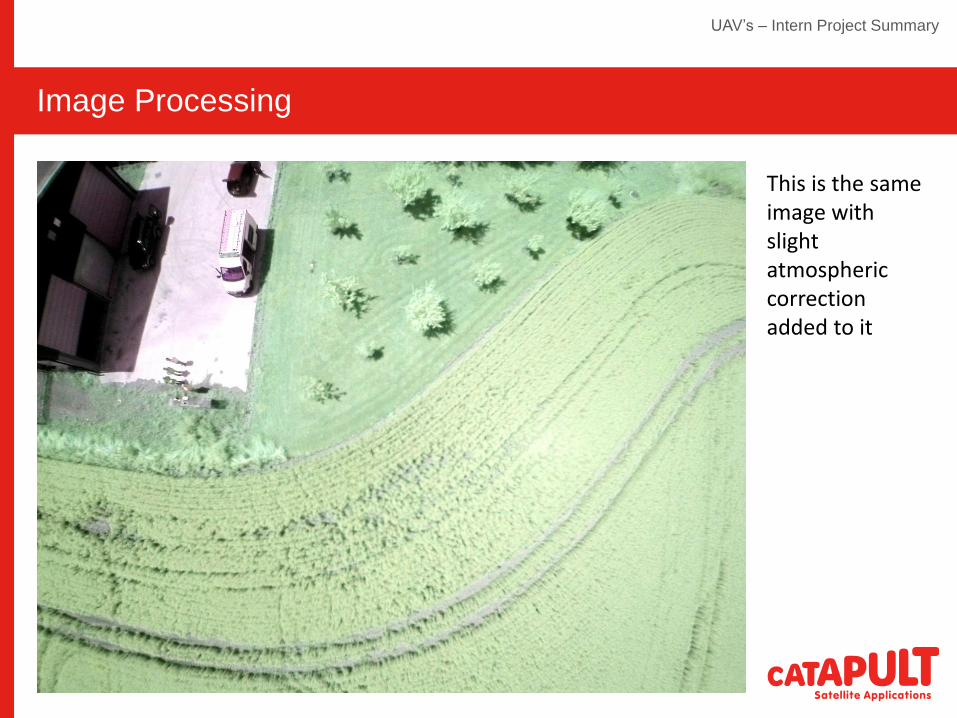
Image Processing
This is the same image with slight atmospheric correction added to it
UAV’s – Intern Project Summary
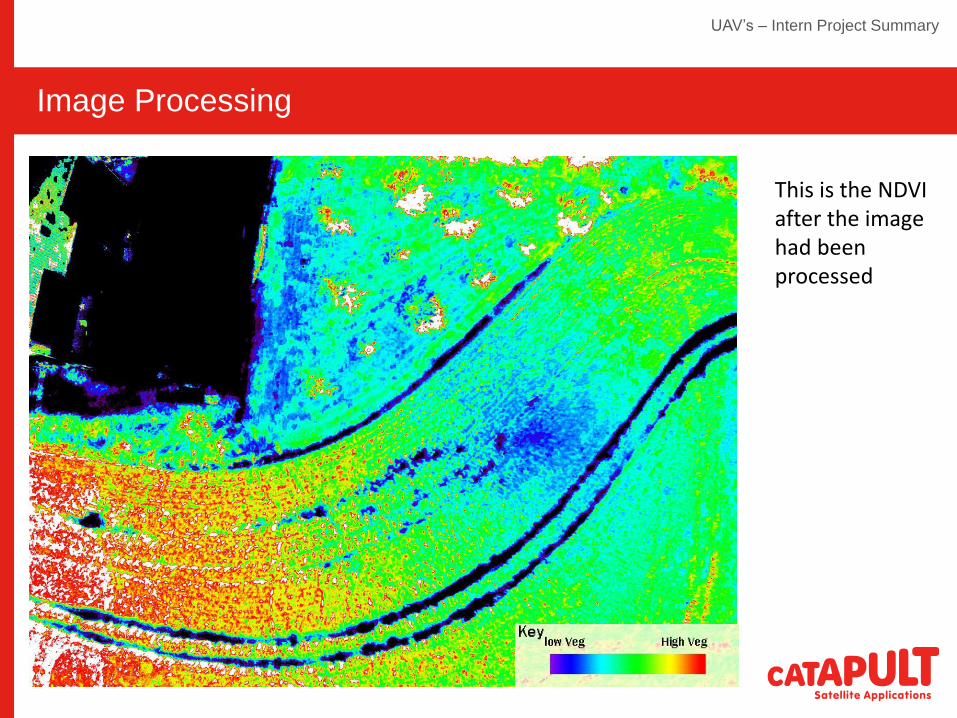
Image Processing
This is the NDVI after the image had been processed
UAV’s – Intern Project Summary
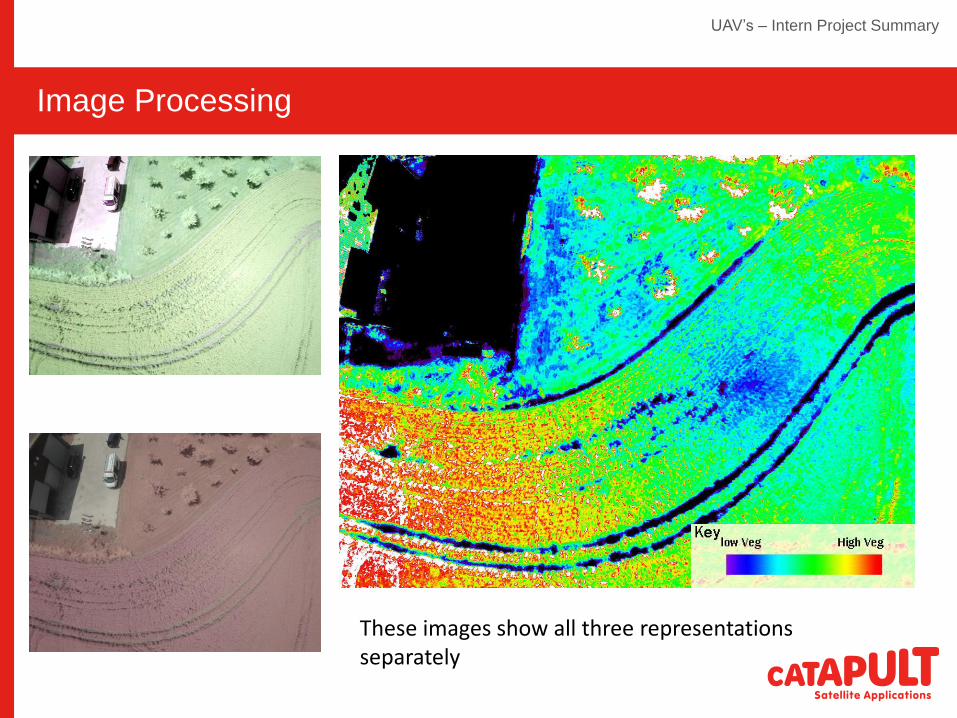
Image Processing
These images show all three representations separately

Results
The major results consisted of the following:
• Hexacopter built
• Fully controllable and adaptable UAV
• Imagery attained
• End user requirements captured and utilised
UAV’s – Intern Project Summary
Future
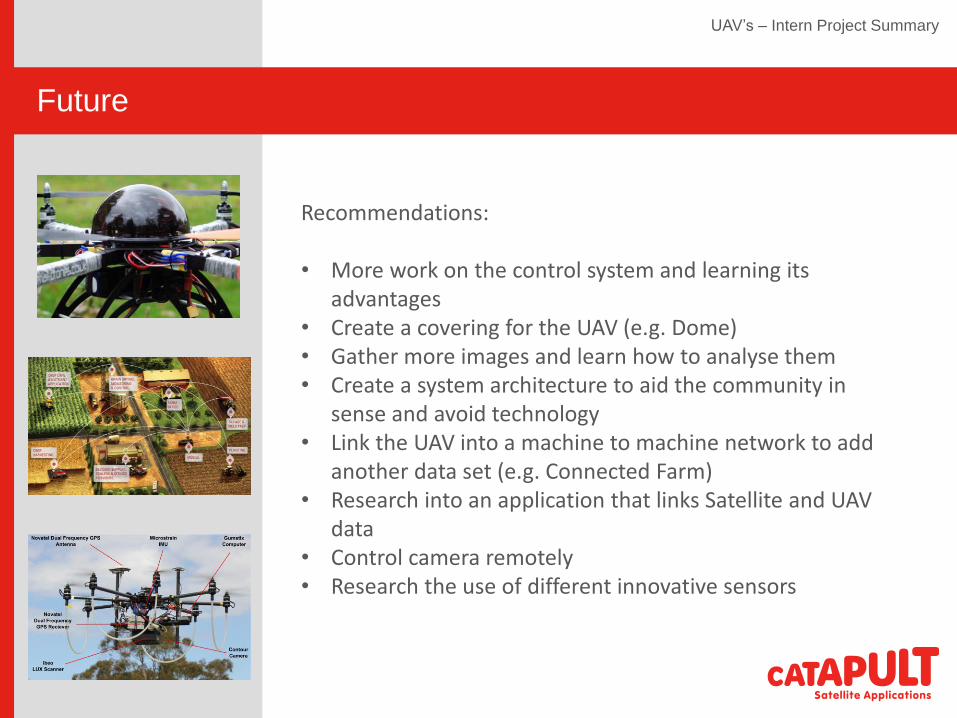
Recommendations:
• More work on the control system and learning its advantages
• Create a covering for the UAV (e.g. Dome)• Gather more images and learn how to analyse them• Create a system architecture to aid the community in
sense and avoid technology• Link the UAV into a machine to machine network to add
another data set (e.g. Connected Farm)• Research into an application that links Satellite and UAV
data• Control camera remotely• Research the use of different innovative sensors
UAV’s – Intern Project Summary
Highlights
• Building a UAV from scratch!
• Seeing a project through from start to finish.
• Networking internally and externally (Events)
• End user engagement (Farm Visits)
• Speaking with a variety of people here at the Catapult both
professionally and socially
• Hands on technical experience
• Learning and building on new and existing skills
• External meetings and presentations (HVM Catapult, Sheffield
University)
• Company working environment
• Annual Conference
• CAKE!
• And CAKE!

Thank You