Embed Size (px)
Citation preview
Principles of :
AC Series motors
Universal motor
Stepper motor
Shaded pole motor
A series ac motor is the same electrically as a dc series motor but construction differs slightly.
Special metals, laminations, and windings are used which reduce losses caused by eddy currents, hysteresis, and high reactance.
Dc power can be used to drive an ac series motor efficiently, but the opposite is not true.
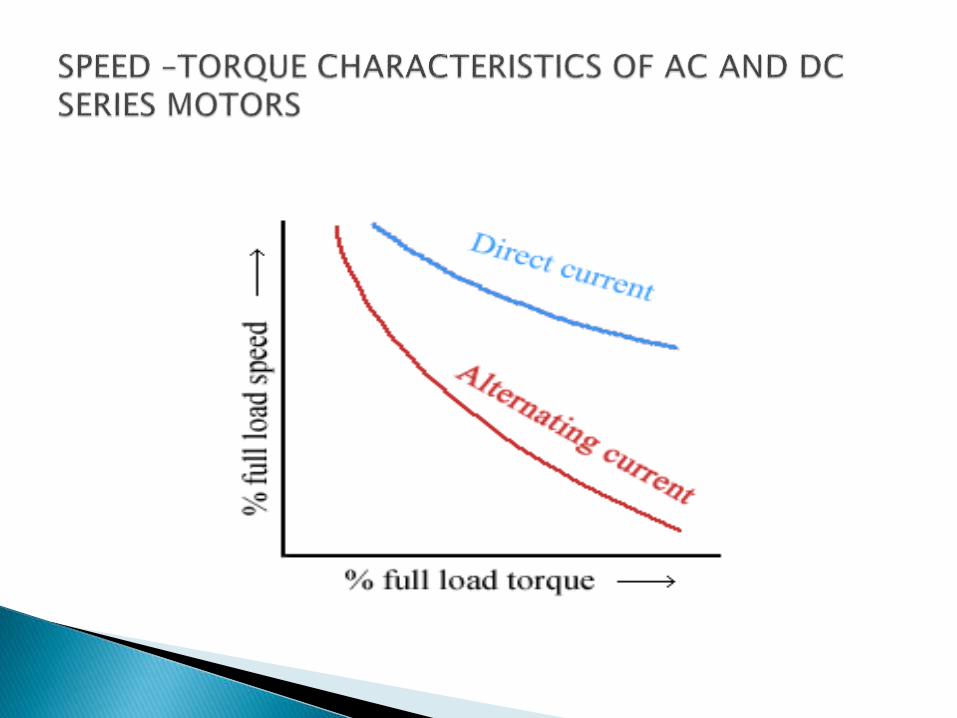
The characteristics of a series ac motor are similar to those of a series dc motor. It is a varying-speed machine.
It has low speeds for large loads and high speeds for light loads.
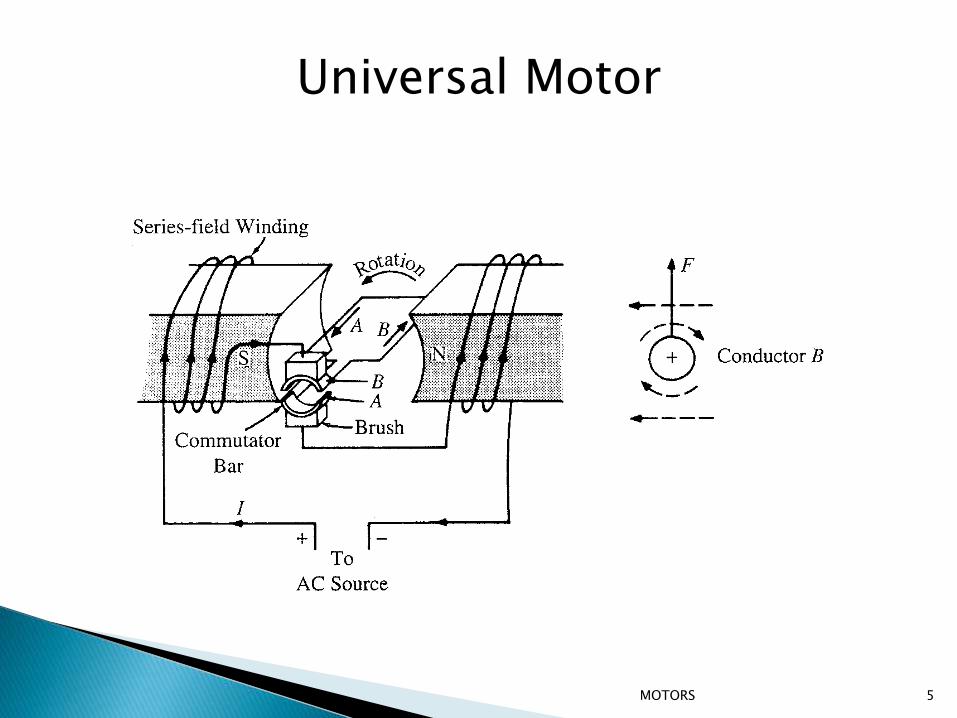
Motor that can be used with a single-phase ac source as well as a dc source of supply voltages are called universal motor.
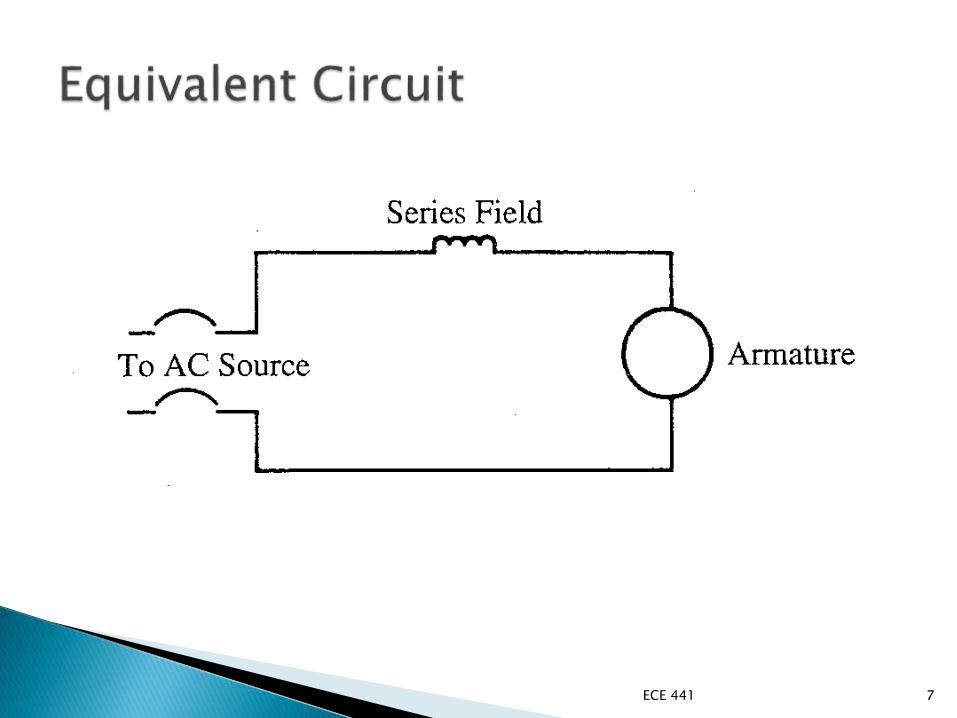
The stator and rotor windings of the motor are connected in series through the rotor commutator.
The universal motor is also known as an AC series motor or an AC commutatormotor.
MOTORS 5
Universal Motor
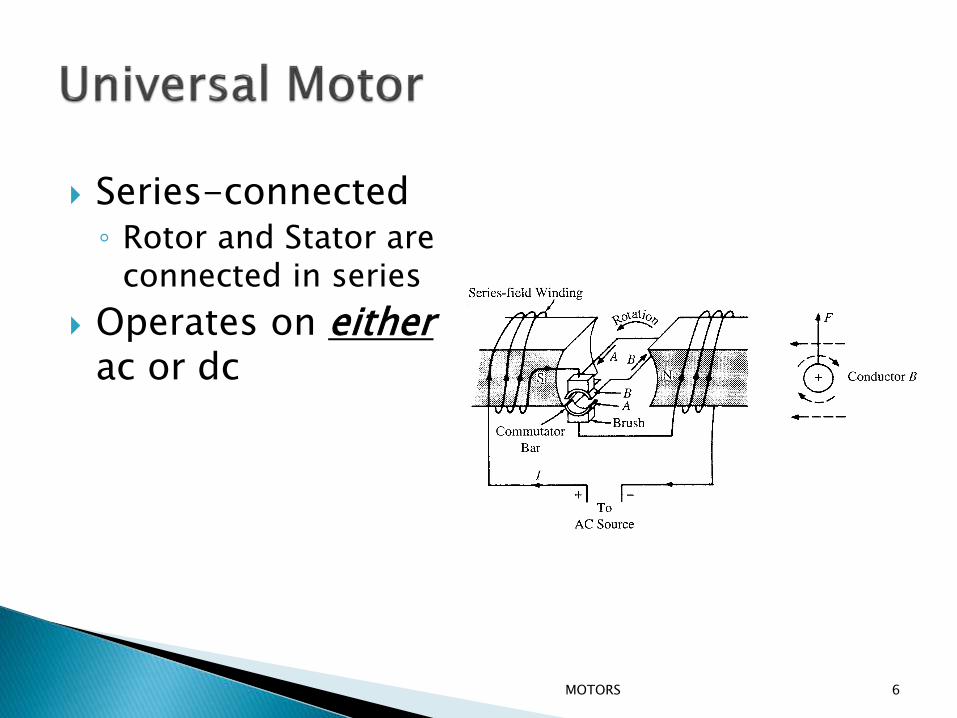
Series-connected◦ Rotor and Stator are
connected in series
Operates on either ac or dc
MOTORS 6
ECE 441 7
ECE 441 8
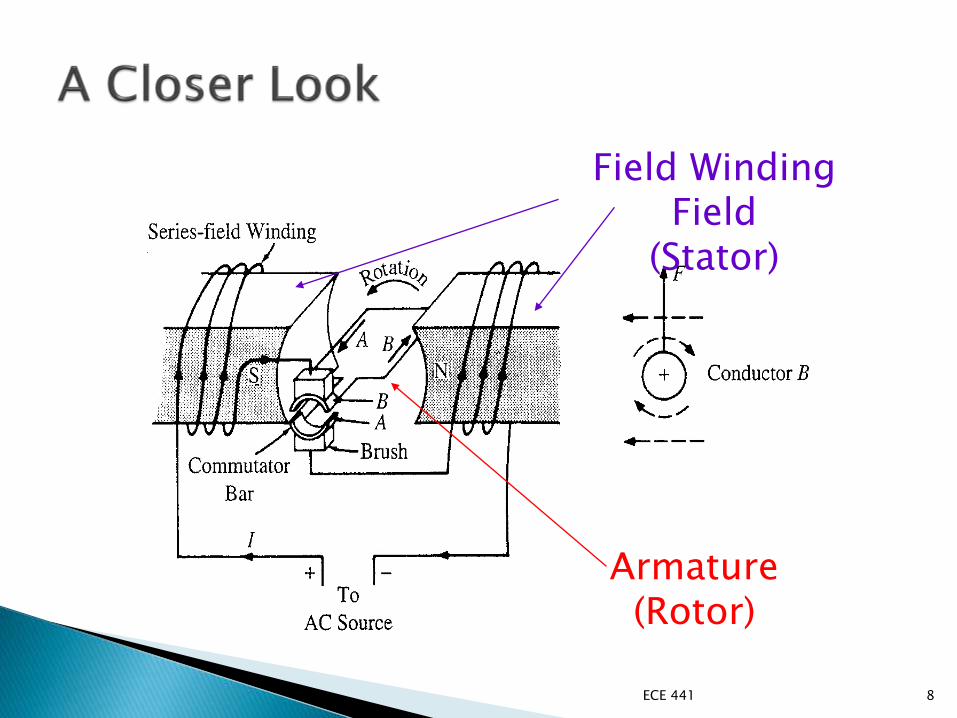
Armature (Rotor)
Field Winding Field
(Stator)
ECE 441 9
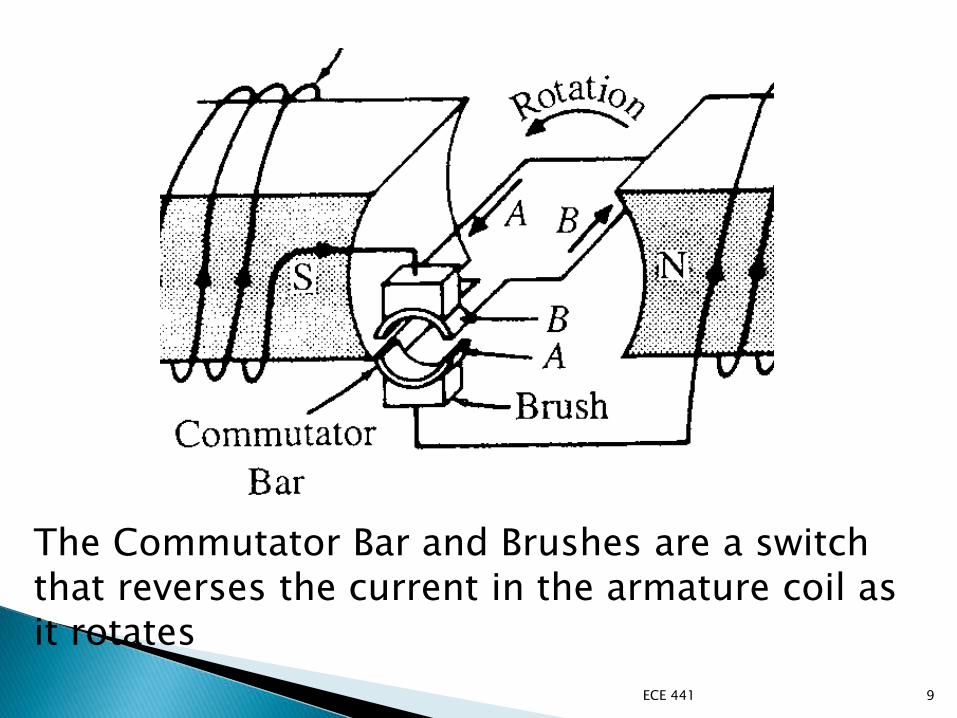
The Commutator Bar and Brushes are a switch that reverses the current in the armature coil as it rotates
ECE 441 10
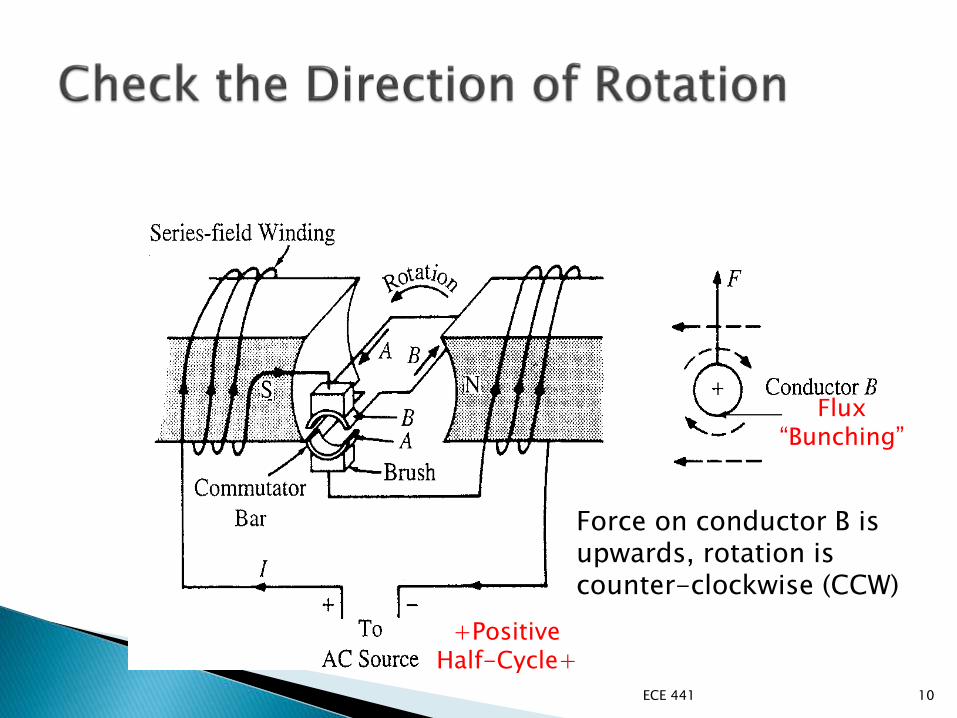
Force on conductor B is upwards, rotation is counter-clockwise (CCW)
Flux “Bunching”
+Positive Half-Cycle+
ECE 441 11
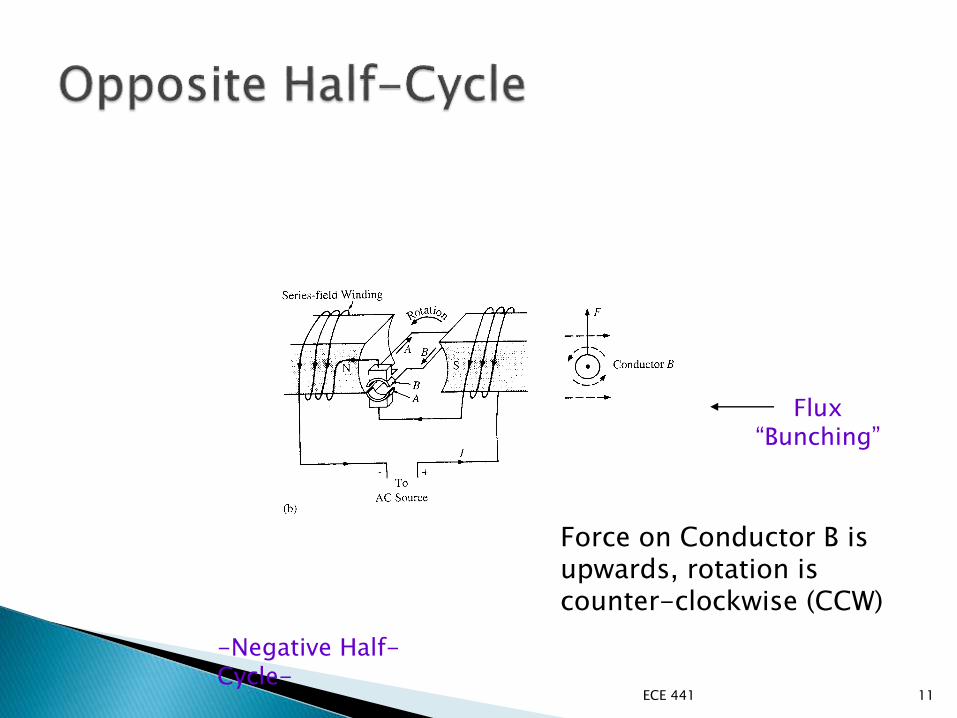
Force on Conductor B is upwards, rotation is counter-clockwise (CCW)
Flux “Bunching”
-Negative Half-Cycle-
How do you reverse the direction of rotation?◦ Reverse the direction of the current in either the field or in
the armature, but not both!
How do you control the speed of the motor?◦ Reduce the voltage applied to the motor
Use an autotransformer or SCR/Triac This reduces the armature current, reducing the torque,
reducing the speed
Applications◦ Portable power tools ◦ Small appliances
ECE 441 12
A special type of synchronous motor which is designed to rotate a specific number of degrees for every electric pulse received by its control unit.
It is a motor that can rotate in both directions, move in precise angular increments, sustain a holding torque at zero speed, and be controlled with digital circuits.
It moves in accurate angular increments known as steps, in response to the application of digital pulses to the electric drive circuit.
Step motors are either bipolar, requiring two power sources or uni polar requiring only one power source.
2 2
1
N
S
1
S
N
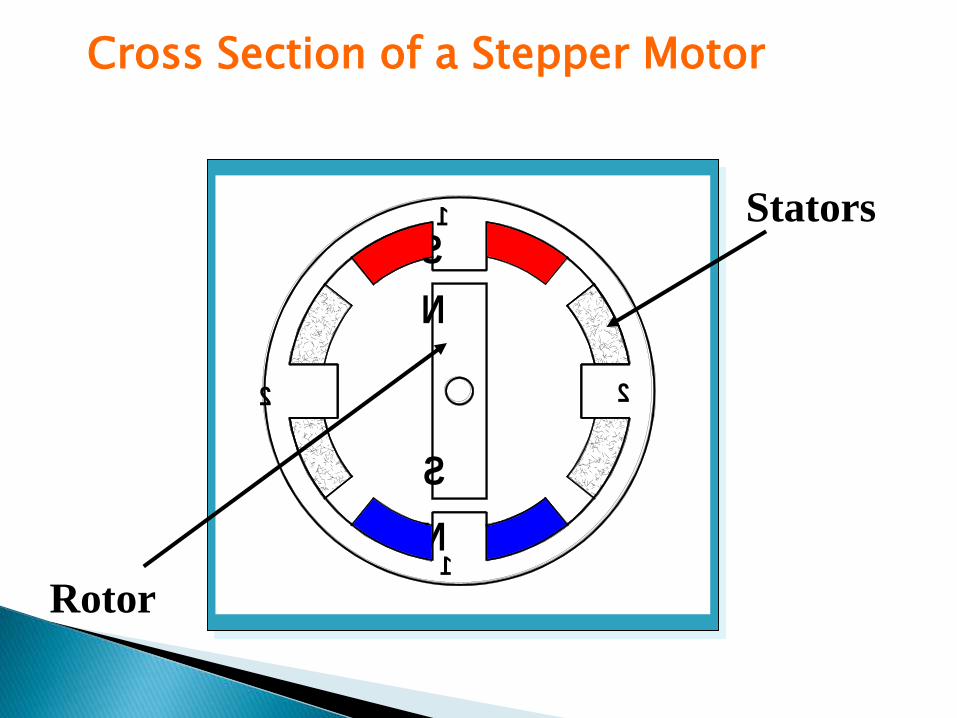
Stators
Rotor
Cross Section of a Stepper Motor
2 2
1
1
S
N
S
N
NN
S S
1
a b
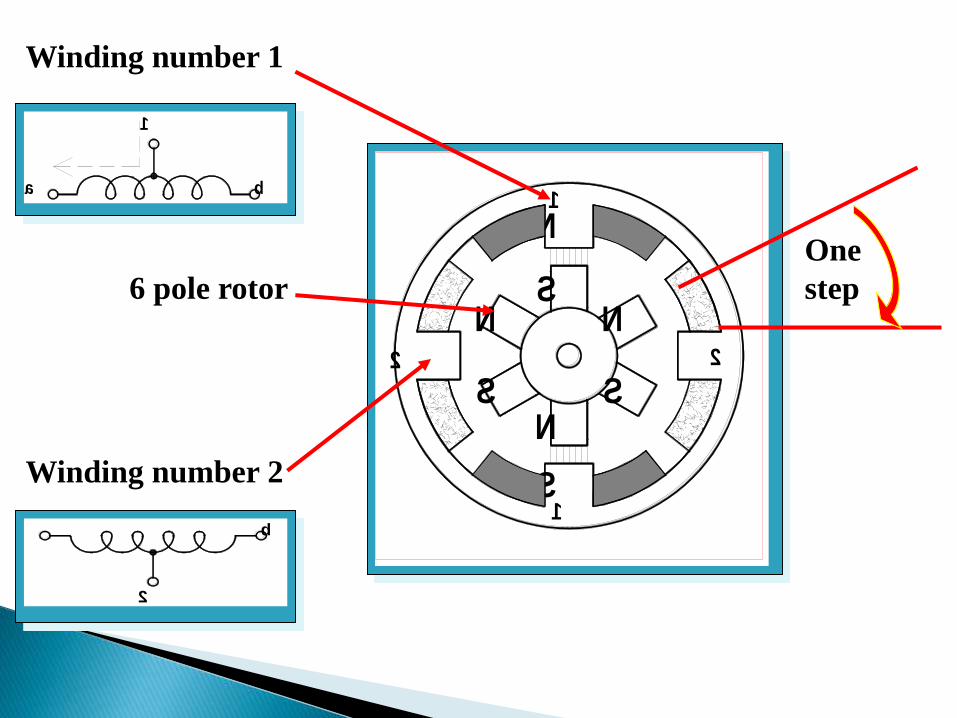
Winding number 1
2
a b
Winding number 2
One
step6 pole rotor
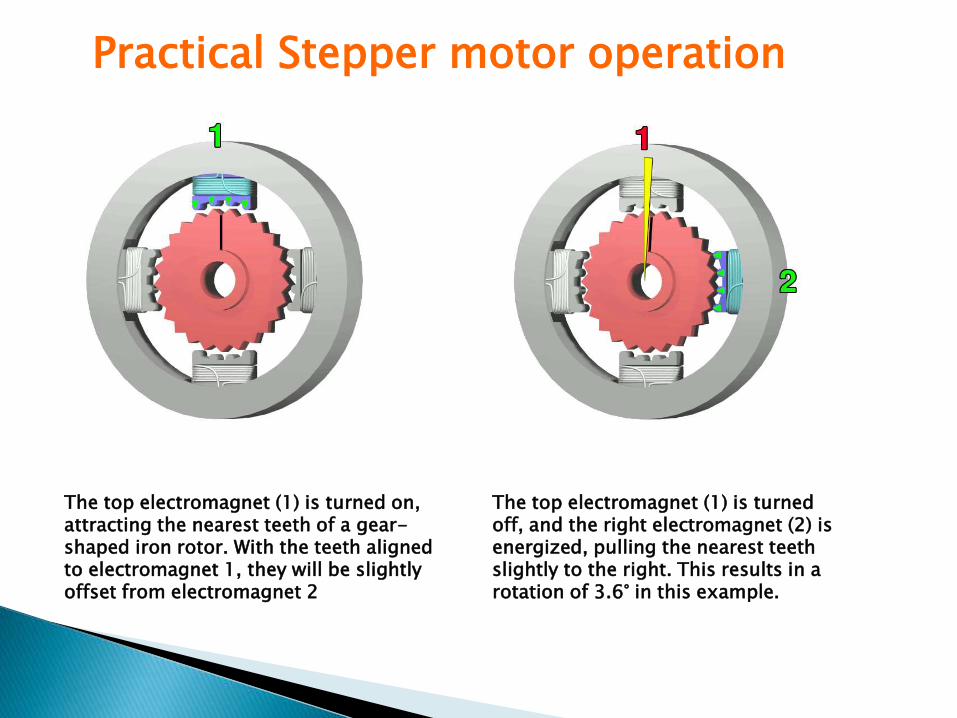
The top electromagnet (1) is turned on, attracting the nearest teeth of a gear-shaped iron rotor. With the teeth aligned to electromagnet 1, they will be slightly offset from electromagnet 2
The top electromagnet (1) is turned off, and the right electromagnet (2) is energized, pulling the nearest teeth slightly to the right. This results in a rotation of 3.6° in this example.
Practical Stepper motor operation
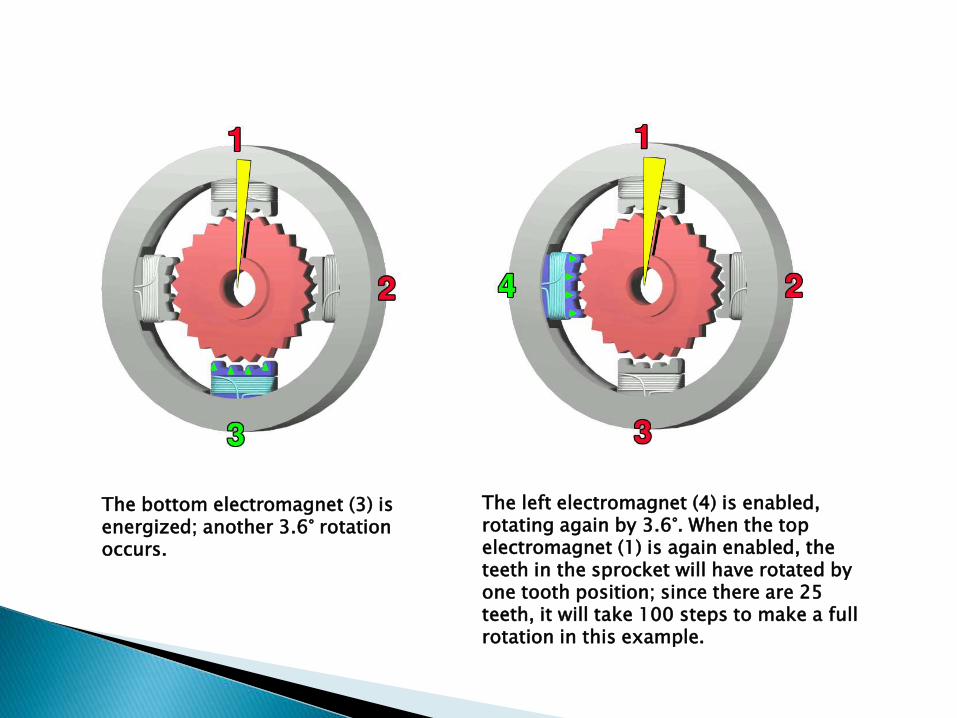
The bottom electromagnet (3) is energized; another 3.6° rotation occurs.
The left electromagnet (4) is enabled, rotating again by 3.6°. When the top electromagnet (1) is again enabled, the teeth in the sprocket will have rotated by one tooth position; since there are 25 teeth, it will take 100 steps to make a full rotation in this example.
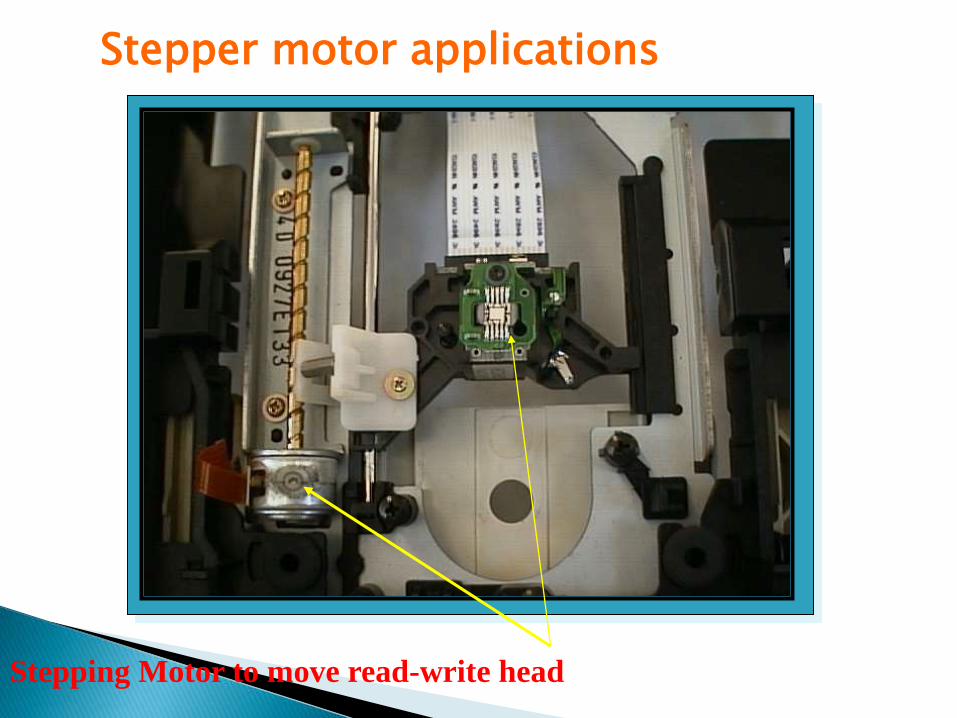
Stepping Motor to move read-write head
Stepper motor applications
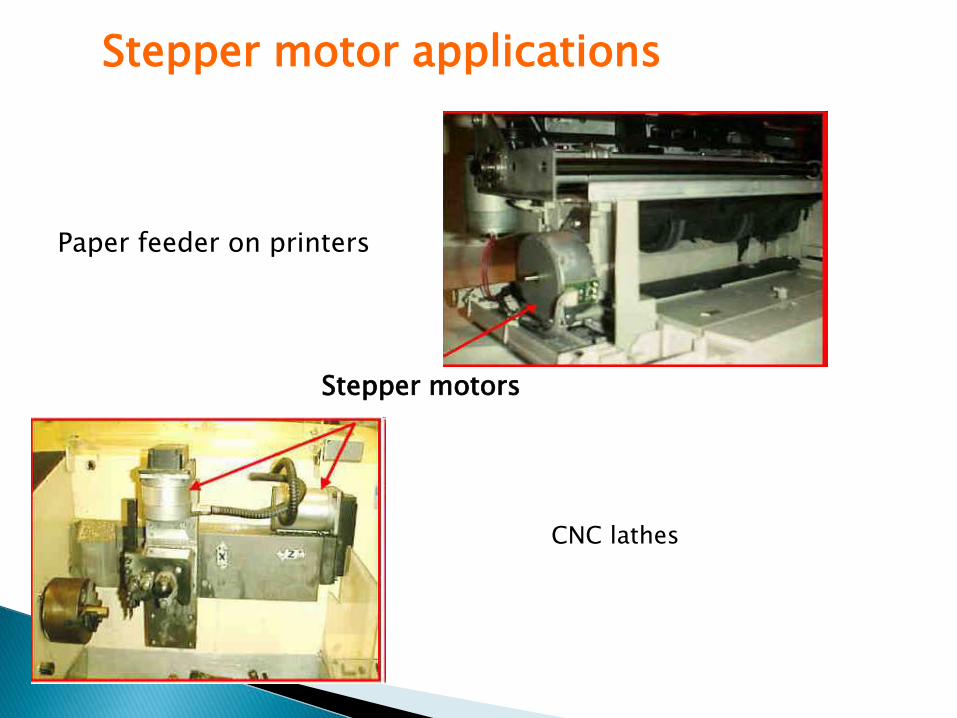
Paper feeder on printers
CNC lathes
Stepper motors
Stepper motor applications
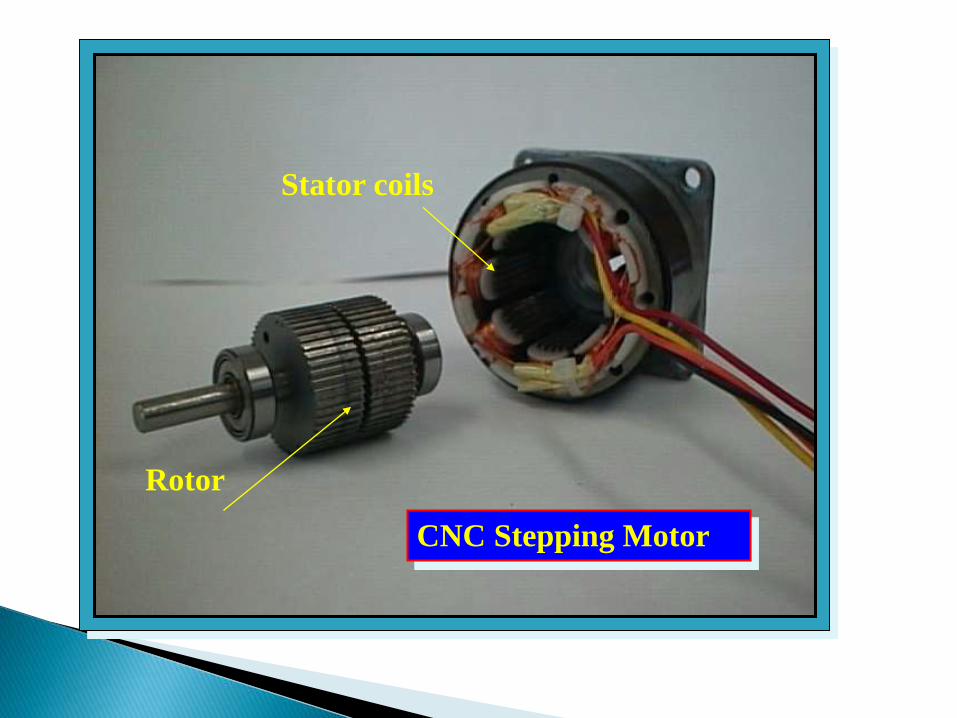
Rotor
Stator coils
CNC Stepping Motor
Advantages:-
Low cost for control achieved
Ruggedness
Simplicity of construction
Can operate in an open loop control system
Low maintenance
Less likely to stall or slip
Will work in any environment
Disadvantages:-
Require a dedicated control circuit
Use more current than D.C. motors
High torque output achieved at low speeds
Advantages / Disadvantages





























