Embed Size (px)
Citation preview
Government Engineering College, Bhavnagar.
Civil Engineering Department
Advanced Engineering Mathematics
Topic:-Application of Ordinary Differential Equation
Elastic Beams.
Content
Beams
Elasticity
Application of Beams
Ordinary Differential Equations
Methods to Solve Ordinary Differential Equation
Euler–Bernoulli beam theory
Static beam equation
Derivation of bending moment equation
Assumptions of Classical Beam Theory
Second Order Method For Beam Deflections
What we learned?
Beams
Beams are the most common type of structural component, particularly in Civil Engineering. Its length is comparatively more than its cross sectional area.
A beam is a bar like structural member whose primary function is to support transverse loading and carry it to the supports. See Figure.
A beam resists transverse loads mainly through bending action, Bending produces compressive longitudinal stresses in one side of the beam and tensile stresses in the other.
Elasticity
It is the property of the material to regain its original shape after the removal of external force.
As per the Hooke’s Law:-
“ Stress is directly proportional to the strain.”
i.e.
,
= E ,
Therefore we have,
E = /. ( Where , E = Young’s Modulus of Elasticity,
= Stress.
= Strain. )
Application of Beams
They are used as structural members in a structure. They transfer load from the superstructure to the
columns and to the sub-soil foundation. They are used in bridges for the transportation of light
as well as heavy vehicles. They are also as a strap beam in strap footing in
foundations to connect and transfer loads from the columns.
Ordinary Differential Equations
The Differential equation containing a single independent variable and the derivative with respect to it is called Ordinary Differential Equation.
Example:-
dy/dx = cx
dV/dx + q = 0
2x2 y’’ + x (2x + 1) y’ − y = 0.
Methods to Solve Ordinary Differential Equation
Variable Separable Method
Homogeneous and Non - Homogeneous Differential Equation Method
Exact and Non-exact Differential Equation Method
Linear and Non- Linear Differential Equation Method
Able’s Formula to find second solution of a Differential Equation
Wronskian method
Methods to find Complementary Function and Particular Integral of a Differential Equation.
Euler–Bernoulli beam theory
Euler–Bernoulli beam theory (also known as engineer's beam theory or classical beam theory) is a simplification of the linear theory of elasticity which provides a means of calculating the load-carrying and deflection characteristics of beams.
It covers the case for small deflections of a beam that is subjected to lateral loads only. It is thus a special case of Timoshenko beam theory that accounts for shear deformation and is applicable for thick beams.
It was first enunciated circa 1750, but was not applied on a large scale until the development of the Eiffel Tower and the Ferris wheel in the late 19th century. Following these successful demonstrations, it quickly became a cornerstone of engineering and an enabler of the Second Industrial Revolution.
The Euler-Bernoulli beam equation is a combination of four different subsets of beam theory. These being the Kinematics
Constitutive
Force resultant
Equilibrium theories
Euler–Bernoulli beam theory
Kinematics
Kinematics describes the motion of the beam and its deflection.
Kirchoff’s Assumptions The normal remain straight
The normal remain unstretched.
The normal remain to the normal (they are always perpendicular to the neutral plane)
Constitutive
The next equation needed to explain the Euler-Bernoulli equation is the constitutive equation.
Constitutive equations relate two physical quantities and in the case of beam theory the relation between the direct stress s and direct strain e within a beam is being investigated.
Force Resultant
These force resultants allow us to study the important stresses within the beam.
They are useful to us as they are only considered functions of, whereas the stresses found in a beam are functions.
Consider a beam cut at a point It is possible to find the direct stress and shear stress, and respectively, of that point. This is due to the direct stress at the cut producing a moment around the neutral plane. By summing all these individual moments over the whole of the cross-section it is possible to find the moment resultant M
Equilibrium
To keep things simple it is sufficient to deal with the stresses resultants rather than the stresses themselves.
The reason, explained previously, is that the resultants are functions of only.
The equilibrium equations are used to describe how the internal stresses of the beam are affected by the external loads being applied.
Static beam equation
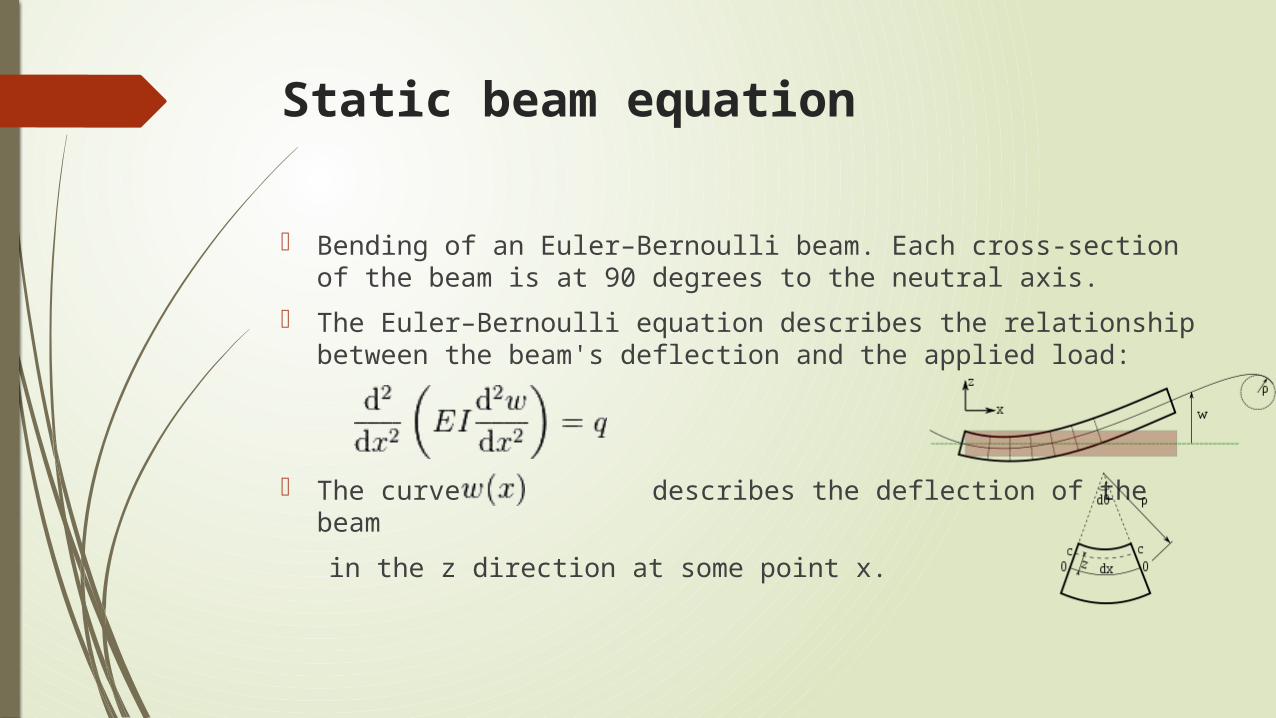
Bending of an Euler–Bernoulli beam. Each cross-section of the beam is at 90 degrees to the neutral axis.
The Euler–Bernoulli equation describes the relationship between the beam's deflection and the applied load:
The curve describes the deflection of the beam
in the z direction at some point x.
Static beam equation
Continued…
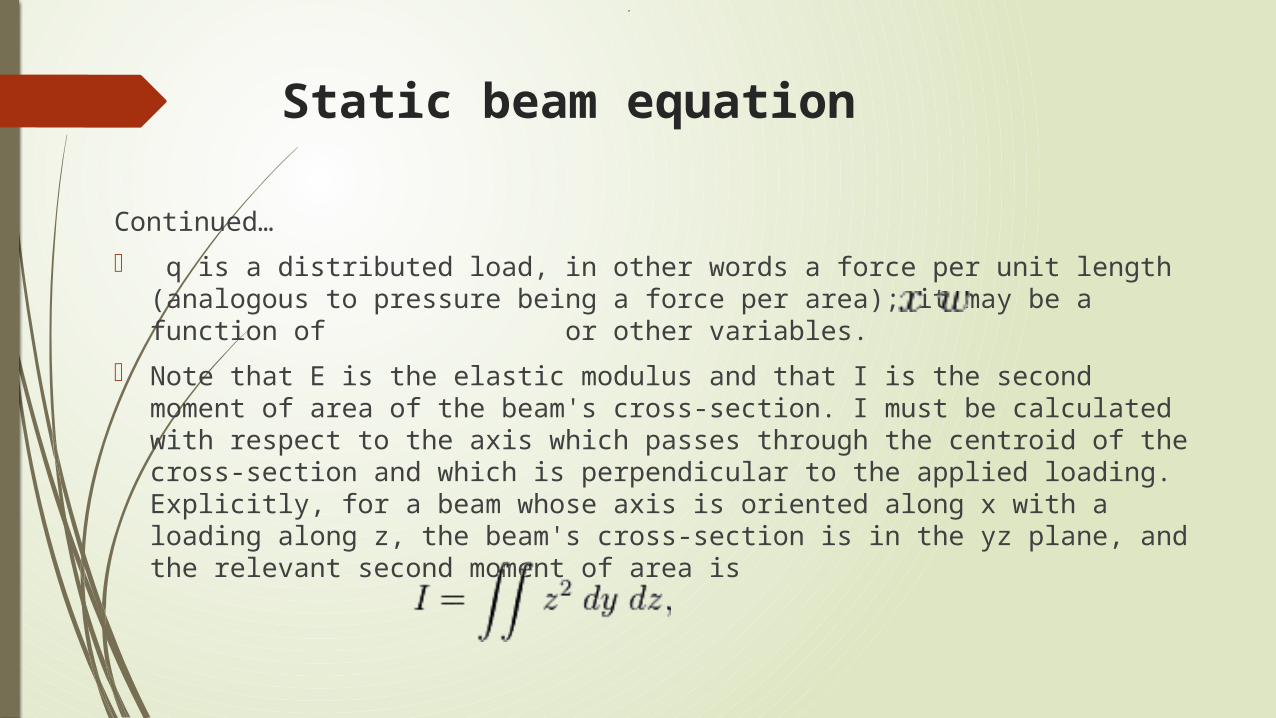
q is a distributed load, in other words a force per unit length (analogous to pressure being a force per area); it may be a function of or other variables.
Note that E is the elastic modulus and that I is the second moment of area of the beam's cross-section. I must be calculated with respect to the axis which passes through the centroid of the cross-section and which is perpendicular to the applied loading. Explicitly, for a beam whose axis is oriented along x with a loading along z, the beam's cross-section is in the yz plane, and the relevant second moment of area is
,
Static beam equation
Continued…
where it is assumed that the centroid of the cross-section occurs at y = z = 0.
Often, the product EI (known as the stiffness) is a constant, so that
This equation, describing the deflection of a uniform, static beam, is used widely in engineering practice.
Static beam equation
dw/dx is the slope of the beam.
, is the bending moment in the beam.
, is the shear force in the beam.
The stresses in a beam can be calculated from the above expressions after
the deflection due to a given load has been determined.
Continued….
Derivation of bending moment equation
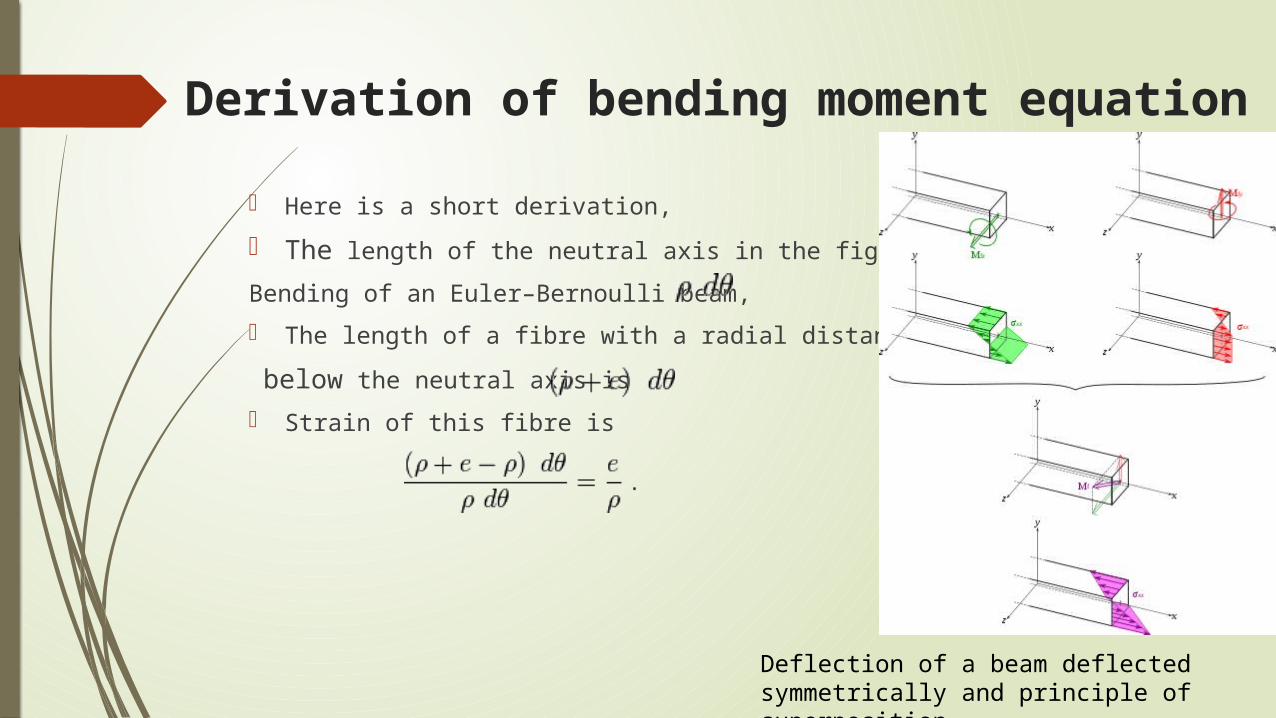
Here is a short derivation,
The length of the neutral axis in the figure,
Bending of an Euler–Bernoulli beam, .
The length of a fibre with a radial distance, e,
below the neutral axis is .
Strain of this fibre is
Deflection of a beam deflected symmetrically and principle of superposition
Derivation of bending moment equation
The differential force vector,
The differential bending moment vector, dM , associated with dF is given by
This expression is valid for the fibres in the lower half of the beam.
Derivation of bending moment equation
the resulting bending moment vector will still be in the -y direction since
we integrate over the entire cross section of the beam and get for M the bending moment vector exerted on the right cross section of the beam the expression
where I is the second moment of area
We know that when dw/dx is small as it is for an Euler–Bernoulli beam,
( is the radius of curvature). Therefore
Assumptions of Classical Beam Theory
1. Planar symmetry. The longitudinal axis is straight and the cross section of the beam has a longitudinal plane of symmetry. The resultant of the transverse loads acting on each section lies on that plane. The support conditions are also symmetric about this plane.
2. Cross section variation. The cross section is either constant or varies smoothly.
3. Normality. Plane sections originally normal to the longitudinal axis of the beam remain plane and normal to the deformed longitudinal axis upon bending.
Assumptions of Classical Beam Theory
4. Strain energy. The internal strain energy of the member accounts only for bending moment deformations. All other contributions, notably transverse shear and axial force, are ignored.
5. Linearization. Transverse deflections, rotations and deformations are considered so small that the assumptions of infinitesimal deformations apply.
6. Material model. The material is assumed to be elastic and isotropic. Heterogeneous beams fabricated with several isotropic materials, such as reinforced concrete, are not excluded.
Second Order Method For Beam Deflections
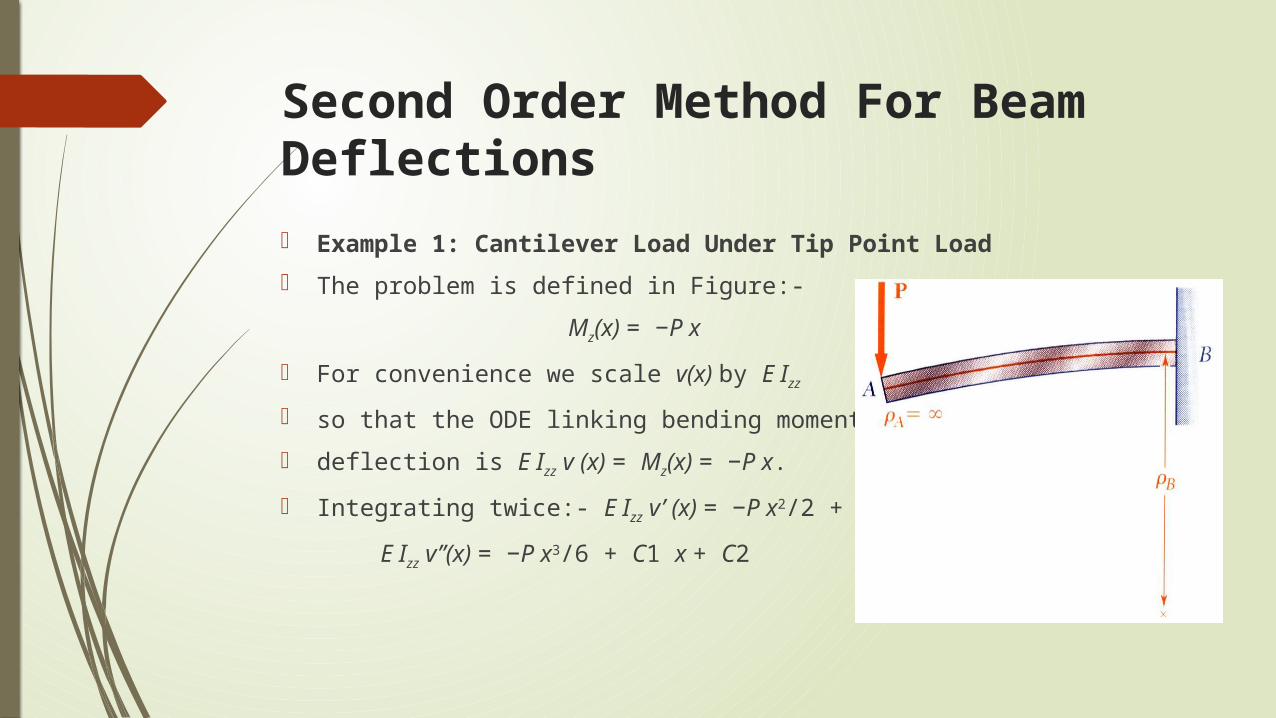
Example 1: Cantilever Load Under Tip Point Load
The problem is defined in Figure:-
Mz(x) = −P x
For convenience we scale v(x) by E Izz
so that the ODE linking bending moment to
deflection is E Izz v (x) = Mz(x) = −P x.
Integrating twice:- E Izz v’ (x) = −P x2/2 + C1
E Izz v’’(x) = −P x3/6 + C1 x + C2
Example 1:- Continued
The kinematic BCs for the cantilever are v’(L) = 0 and v(L) = 0 at the fixed end B. The first one gives
E Izz v’(L) = −PL2/2 + C1 = 0, whence C1 = PL2/2.
The second one gives
E Izz v(L) = −PL3/6 + C1L + C2 = −PL3/6 + PL3/2 + C2 = 0 whence C2 = −PL3/3.
Substituting into the expression for v(x) gives
v(x) = − P/6E Izz ( x3 − 3L2x + 2L3)= − P/6E Izz (L − x)2(2L + x)
Of particular interest is the tip deflection at free end A, which is the largest one. Setting x = 0 yields
v(0) = vA = − PL3 /3E Izz ⇓ (The negative sign indicates that the beam deflects downward if P > 0.)
What we learned?
Total amount of deflection which will occur. Merits and Demerits of this theory. Comparison Between the two theories.
(Timoshenko Beam Theory and Euler–Bernoulli beam theory.)
Frequency of a Vibrating System Using a Vertical beam.
Thank You For Bearing.
By, Nitin Charel (130210106011) Kartik Hingol (130210106030) Bhavik Shah (130210106049) Yash Shah (130210106052) Digvijay Solanki (130210106055)
![MODELLING GROUND FOUNDATION INTERACTIONSraiith.iith.ac.in/2780/1/MGFI.pdf · features of continuous elastic solids (Kerr [6], 1964; Hetenyi ... elastic beams, or elastic layers capable](https://img.pdfslide.us/doc/110x75/5b49d2347f8b9aa82c8bade8/modelling-ground-foundation-features-of-continuous-elastic-solids-kerr-6.jpg)




























