Embed Size (px)
Citation preview

2
Stress-Strain Analysis of a Cylindrical Pipe Subjected to a Transverse
Load and Large Deflections
R.M. Guedes
INEGI - Mecânica Experimental e Novos Materiais, Faculdade de Engenharia,
Universidade do Porto, Rua Dr. Roberto Frias s/n, 4200-465 Porto, Portugal
ABSTRACT
The increased use of polymers and reinforced polymers in civil construction
applications originated elegant structures with a high specific strength and stiffness. The
mechanical performance improved significantly in comparison with traditional
materials; however the structural engineers face new challenges. The high strength
compared with the stiffness of these new materials allows large deformations without
failure or damage, especially in large structures. The classical theories, i. e. based on
small deformations, became no longer valid and corrections must be used. The aim of
this work was to show this occurrence in a practical case, used in civil engineering
construction. For that purpose a glass-fiber reinforced (GRP) buried pipe under a
transverse load was analyzed. Strains experimentally measured and FEM analyses are
used to verify the phenomenon. In this case the relation between the maximum
3
deflection and the maximum hoop strain was no longer linear as predicted by the small
deformation theory. A simple approach using deformation components based on finite
deformations theory was proposed and assessed. Although this approach, which has an
analytical integral solution, does not predict accurately the nonlinear phenomena it
allowed a dimensionless parametric study of the problem. A simple correction of this
approach is proposed and assessed.
KEYWORDS: Polymer-matrix composites (PMCs); Non-linear behaviour; Finite
element analysis (FEA); Elasticity; Finite Deformations.
INTRODUCTION
The use of composite materials for piping systems and other civil engineering structures
has renewed interest in problems of stress analysis of cylindrical composite structures.
Standard methodologies, for mechanical characterization of plastic piping systems,
subject ring pipes to a specified diametric compressive loading. In the present case the
pipe sections had an internal diameter of 500 mm and an external diameter of about 524
mm, i.e. a wall thickness of about 12 mm. The nominal ring circumferential stiffness
was 10.5 GPa and the circumferential strength close to 250 MPa. Usually these
structures are considered thin rings and the classical theories, based on small
displacements, provide an accurate solution for these cases. However when high
strength is combined with relative low stiffness, large deformations take place before
failure occurs.
4
This phenomenon is analysed using Finite Element Analysis and experimental data. The
relationship between maximum hoop strain and maximum deflection is no longer linear
as predicted by small displacement theory. An analytical integral solution using
deformation components based on finite deformations theory is presented and assessed.
As far our knowledge goes, there are no analytical integral solutions for the specific
problem described. In this type of problems the solution is given in terms of elliptical
integrals, which have to be numerically integrated [1]. Furthermore few works call the
attention for the geometrical nonlinear effects which can occur in composite structures.
This is especially critical when measuring the mechanical properties until structural
collapse or failure is verified. Consequently the nonlinear geometrical phenomenon can
be mistaken for damage.
Tse et al. [2-4] engaged on a complete study of large deflection problem of circular
springs under uniaxial load (tension and compression). The solutions were obtained in
terms of elliptical integrals. Comparisons with experimental data show a good
agreement between theoretical approach and experimental results.
Sheinman [5] proposed a general analytical and numerical procedure, based on large
deflections, small strains and moderately small rotations, for an arbitrary plane curved
beam made of linear elastic. The influence of shear stiffness was also considered.
Several papers analysed large displacements of plane and curved cantilever beams. The
classical problem of the deflection of a cantilever beam of linear elastic material, under
the action of an external vertical concentrated load at the free end, was analysed
considering large deflections [6]. As the authors mention the mathematical treatment of
the equilibrium of cantilever beams does not involve a great degree of difficulty
however analytical solution does not exist. Carrillo [7] analysed the deflections of a
5
cantilevered beam made of a linear-elastic material under the influence of a vertical
concentrated force at the free end. The author shows that the widely known simple
solution for small deflections is a limiting case, which holds when forces applied are
much smaller than the allowable maximum force before beam failure. González and
LLorca [8] studied the deformation of an inextensible, curved elastic beam subjected to
axial load by including the effect of large displacements. The load–axial displacement
curves were accurately fitted to a polynomial expression which provided the evolution
of the beam stiffness during deformation.
CURVED BEAM THEORY FOR SMALL DEFLECTIONS (CBTSD):
CLASSICAL SOLUTION
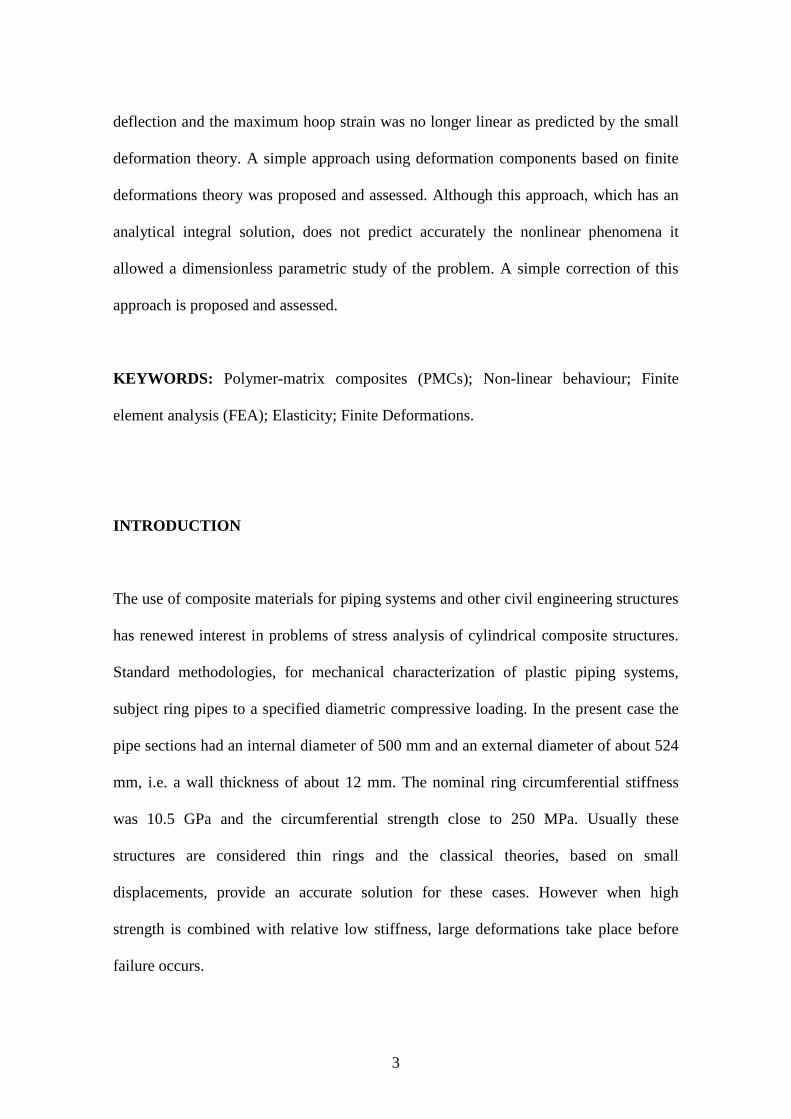
In Figure 1 is depicted the half-view of the pipe along with the general geometrical
parameters, where R represents the middle plane radius.
O
R
V0=-F/2
M0 M0
V0 θ
w0(θ) u0(θ)
Figure 2- The half-view of the pipe.
The differential equations of equilibrium [9-11], in polar coordinates, are

6
( ) ( )
( ) ( )
( ) ( )
0
0
0
N V
V N
M RV
θ θθ
θ θθ
θ θθ
∂ + =∂
∂ − =∂∂ − =∂
. (1)
Using the following boundary conditions,
( ) ( )( )( ) ( )
0
02
0
0 0
FV V
M M
N N
π
π
= = − = = =
. (2)
The system is readily solved,
( ) ( )( ) ( )( ) ( )
0
0
0 0
N V sin
V V cos
M M RV sen
θ θθ θθ θ
= −
= = +
. (3)
For thin beams the middle surface strain 0ε and curvature κ changes are:
00 0
2 0 0
2 2
1
1
uw
R
w u
R
εθ
κθ θ
∂= + ∂
∂ ∂ = − + ∂ ∂
. (5)
where 0u is the tangential displacement and 0w the radial displacement of the beam
middle surface.
The normal strain at an arbitrary point can be found using
( )01
1z
z Rε ε κ= +
+. (7)
7
The term z R is small in comparison with unity and can be neglected for thin beams.
The Kirchhoff hypotheses, normal to the middle surface remain straight and normal and
unextended in length during deformation, is used.
The laminated curved beam is composed of several plies, typically thin layers. The
stress-strain for an element of material in the kth lamina, is given by
( )11
kQσ ε= . (8)
The force and moment resultants are integrals of the stresses over the beam thickness h,
2
2
h
h
Nb dz
M z
σσ−
=
∫ , (10)
where b is the width of the beam. The previous equations may be rewritten as,
11
k
k
N h
hk
Nb dz
M z
σσ−=
=
∑∫ . (11)
where
( )
( )111 11
1
k
k
N hk
hk
RA b Q dz
R z−==
+∑ ∫ , (13a)
( )
( )111 11
1
k
k
N hk
hk
RzB b Q dz
R z−==
+∑ ∫ , (13b)
( )
( )1
2
11 111
k
k
N hk
hk
RzD b Q dz
R z−=
=+∑ ∫ , (13c)
where each layer is considered orthotropic under a plane stress state, i.e.
( )( )
( ) ( )
( )
( )
( )
( )111
k k kk r r
k k k kr r r
EQ , with
E Eθ θ θ
θ θ θ
ν νν ν
= =−
, (13c)

8
where θ and r indexes represent the tangential and radial directions.
Knowing the force and moment resultants the middle surface strain 0ε and the
curvature κ can be obtained,
( ) ( )
( ) ( )
0 11 11 11 002
11 11 11
0 11 11 11 02
11 11 11
M B B R D sin V
D A B
M A A R B sin V
D A B
θε
θκ
+ += − −
+ + =
−
. (14)
The displacements an rotations can be readily obtain, using the differential equations (6-
7) along with the following boundary conditions,
( ) ( )
( )
( ) ( )
0 0
0
0 00 0
0 0
0
0 0
tangential displacement:
u u
radial displacement:
w
rotation :
w wu u
π
π
πθ θ
= = = ∂ ∂− + = − + = ∂ ∂
. (15)
The system of differential equations to solve for displacements is
( ) ( )
( ) ( )
00 11 11 11 00
211 11 11
2 0 00 11 11 11 0
22 211 11 11
1
1
M B B R D sin Vuw
R D A B
M A A R B sin Vw u
R D A B
θθ
θθ θ
+ + ∂ + = − ∂ −
+ + ∂ ∂ − + = ∂ ∂ −
. (15a)
If the second equation is integrated,
( ) ( )2 00 11 11 11 00
12211 11 11
1 M A A R B cos Vwu C
R D A B
θ θθ
− + ∂− + = + ∂ − . (15b)
Using the boundary conditions, 0M and 1C are obtained,

9
( )
( )
11 110 0
11
11 11 01 2
11 11 11
2 A R B M V
A
A R B VC
D A B
π+
= − + = −
. (15c)
The solution for displacements, 0u , 0w is obtained using the mathematical standard
procedures [12],
( )
( )( ) ( )
( )
( )
20 2
11211 11 11
22 11
11 1111
20 2
11211 11 11
11
2 4 4 2
8 2 2 2 4 4
4 4
8 1 2
0
0
1 R Ru = V A sin cos sin sin
2 D A B
R BB sin cos sin sin D sin sin
A
1 R Rw = V A cos cos cos sin
2 D A B
RB cos cos
π θ π θ θ θπ θ θ ππ
θ π θ θ π π θ θ θ π θ θπ π
θπ θ θ π θ π θπ
θ π θπ
− − − − +−
− + + − − + + − −
+ − + +−
+ + + ( )( ) ( )( ) ( )2
1111
11
4 1B
sin cos D cos sin cosA
θ π θ θ π θ θ θπ
− − + − − + + (16)
If we assume that we have one orthotropic layer, which admits the following
approximation valid for beams
11Q Eθ≅ , (17)
and assuming the following approximation by series expansion, for 1h R≪ ,
31 12121
2
hh hRlog
h R RR
+ ≅ + −
, (18)
the following relationships are obtained,

10
11
12
12
h
RA bE Rlog bE hh
R
θ θ
+ = ≅
−
, (19a)
32
11
12
1212
hbE hh RB bE R log
hR RR
θθ
+ = − ≅ −
−
, (19b)
33
11
12
1212
hbE hh RD bE R log
hRR
θθ
+ = − ≅
−
, (19c)
2
0 0
2
6
R hM V
Rπ π
= − −
. (19d)
The maximum moment is obtained for 0θ = , i.e. 0maxM M= . Concomitantly the
maximum radial deflection is obtained for 0θ = ,
( )( )( ) ( )
2 2 2
0 003
2 24 3 20 0 0
R R hw V , u
bE hθ
ππ− −
= = , (20a)
( ) ( )00 03
24 20 0
Rk V , V
bE h bE hθ θ
επ π
= = . (20b)
The maximum hoop strain, obtained from Equation (7), is given by
( )( )( ) 02
4 61 1
2max
h RV
E bR h R h Rθ
επ
±=
± ∓ . (21)
The maximum hoop strain depends linearly on the applied transverse load. Furthermore
the maximum hoop strain can be obtained as function of the maximum deflection
( )0 0w ,
11
( )0
22
2 60
2 3 24 2max
h hwR R
Rh h
R R
επ
± = ±
± − +
. (22)
This expression can be simplified, since 1h R≪ ,
( )( )0
2
2 0
8max
hwR
Rε
π≅ ±
−. (23)
This result coincides with result obtained for thin beam theory as it should be expected
[13]. In conclusion the maximum hoop strain depends only on the geometry and the
maximum radial displacement and it is linearly proportional to the maximum radial
displacement.
CURVED BEAM THEORY FOR LARGE DEFLECTIONS (CBTLD): AN
APPROXIMATE SOLUTION BASED ON FINITE DEFORMATIONS THEORY
Accordingly with Ambartsumyan [14] the theory of finite deformations, or the non-
linear theory of elasticity, differs significantly from the linear theory of elasticity due to
certain geometric properties contained within it. The fundamental difference is that the
theory of finite deformations takes into account the difference between the geometry of
the deformed and undeformed states. Based on finite deformations theory the hoop
strain [14] is given by
20 00 0 2 0
2
1 1 1
2 2
u uw w
R Rε ϕ
θ θ ∂ ∂= + + + + ∂ ∂
. (24)

12
Assuming 20
02
10
2
uw
R θ ∂ + ≈ ∂
the Equation (24) can be simplified,
00 0 21 1
2
uw
Rε ϕ
θ ∂= + + ∂
, (24a)
where
001 w
R uR
ϕ κ ϕθ θ
∂ ∂= → = − + ∂ ∂ . (25)
In order to have an analytical integral solution; it was not considered the influence of
geometry of the deformed state on the bending moment distribution. This is an
important drawback of the present approach. However if that was taken it account, the
problem could only be solved numerically (solution in terms of elliptical integrals), as it
was done previously by Tse et al. [2].
In this case the system of differential equations, for one orthotropic layer, to solve for
displacements and curvature is
( )( )( )( )
00 2 0
2 2
2 20 0
3 2 2
121 1
2 12
12 12 12
12
M Ruw
R bE h R h
R M R R h V sin
bE h R h
θ
θ
ϕθ
θκ
∂ + + = ∂ −
− −= −
. (26)
From the last equation ϕ can be calculated
( )( )23
0 033 2 2
12 1144
12
R cosRM V
bE hbE h R h θθ
θθϕ−
= −−
. (27)
Therefore the system of differential equations can be written as

13
( ) ( )( )
( )( )
220 3
0 00 032 2 3 2 2
20 30
0 033 2 2
12 1121 1 144
212 12
12 11 144
12
R cosM Ru Rw M V
R bE hbE h R h bE h R h
R cosw Ru M V
R bE hbE h R h
θθ θ
θθ
θθθ
θθθ
− ∂ + = − − ∂ − − − ∂− + = + ∂ −
.
(28)
The boundary conditions are, of course, the same as for the CBTSD. The general
solution is given in appendix. The solution for 0M is exactly the same that was obtained
for the CBTSD. For 0θ = the strain and curvature are the same, as obtained from the
CBTSD, but not the radial displacement,
( ) ( )( )
( )( )
2 2 25 220 0
0 02 33
2 3 24 22 576 600 0 0
R R hRw V V , u
bE hbE h θθ
ππππ
− +− = + = , (29)
( ) ( )00 03
24 20 0
Rk V , V
bE h bE hθ θ
επ π
= = . (30)
As before the strain can be obtained as function of the maximum deflection ( )0 0w ,
( )( )( )0
22
0
4 20
22 8 0
3
max
h hwR R
Rh hw
R R
επ ξ
± = ±
± − + +
, (31a)
where
( )( ) ( ) ( ) 2 422 2 2
0
040 4 31 40 8 128
3 3 3 3
w h hw
R R Rξ π π π = − + − + − +
. (31b)
This could be simplified, since 1h R≪ ,
14
( )( )( )( )0
20
4 0
8 0max
hwR
Rwε
π ξ≅ ±
− +, (32a)
where
( )( ) ( ) ( )22 20
01200 8 128
9
ww
Rξ π π ≅ − + −
. (32b)
Hence, as for the CBTSD solution, the maximum hoop strain depends only on the
geometry, i.e. the h/R ratio, and on the maximum radial displacement. However the
linear relationship, between maximum hoop strain and the maximum radial
displacement, no longer holds.
NON-LINEAR FEM SIMULATION
A 2D FEM modeling with a very refined mesh was used with 17110 CPE8R planar
elements of ABAQUSTM using a large displacement formulation. Two different cases
were simulated using the same ratio h/R=3/64, described in Table 1, to verify the
dimensionless relationships obtained using the CBTLD.
Table 1: FEM simulation cases
Case Eθ (MPa) Er (MPa) Gθr (MPa) νθr R (mm) h (mm)1 10500 3800 1500 0.3 256 122 1050 380 150 0.3 64 3
15
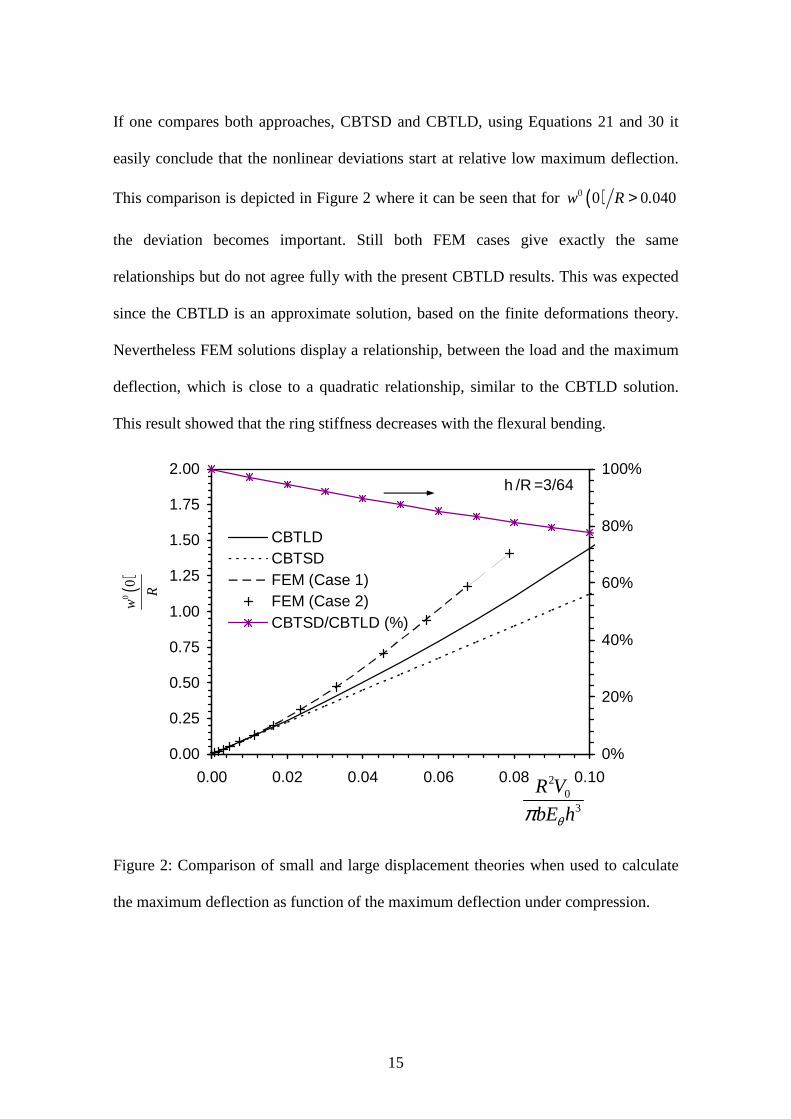
If one compares both approaches, CBTSD and CBTLD, using Equations 21 and 30 it
easily conclude that the nonlinear deviations start at relative low maximum deflection.
This comparison is depicted in Figure 2 where it can be seen that for ( )0 0 0 040w R .>
the deviation becomes important. Still both FEM cases give exactly the same
relationships but do not agree fully with the present CBTLD results. This was expected
since the CBTLD is an approximate solution, based on the finite deformations theory.
Nevertheless FEM solutions display a relationship, between the load and the maximum
deflection, which is close to a quadratic relationship, similar to the CBTLD solution.
This result showed that the ring stiffness decreases with the flexural bending.
0.00
0.25
0.50
0.75
1.00
1.25
1.50
1.75
2.00
0.00 0.02 0.04 0.06 0.08 0.10
0%
20%
40%
60%
80%
100%
CBTLDCBTSDFEM (Case 1)FEM (Case 2)CBTSD/CBTLD (%)
20
3
R V
bE hθπ
()
00
w
R
h /R =3/64
Figure 2: Comparison of small and large displacement theories when used to calculate
the maximum deflection as function of the maximum deflection under compression.
16
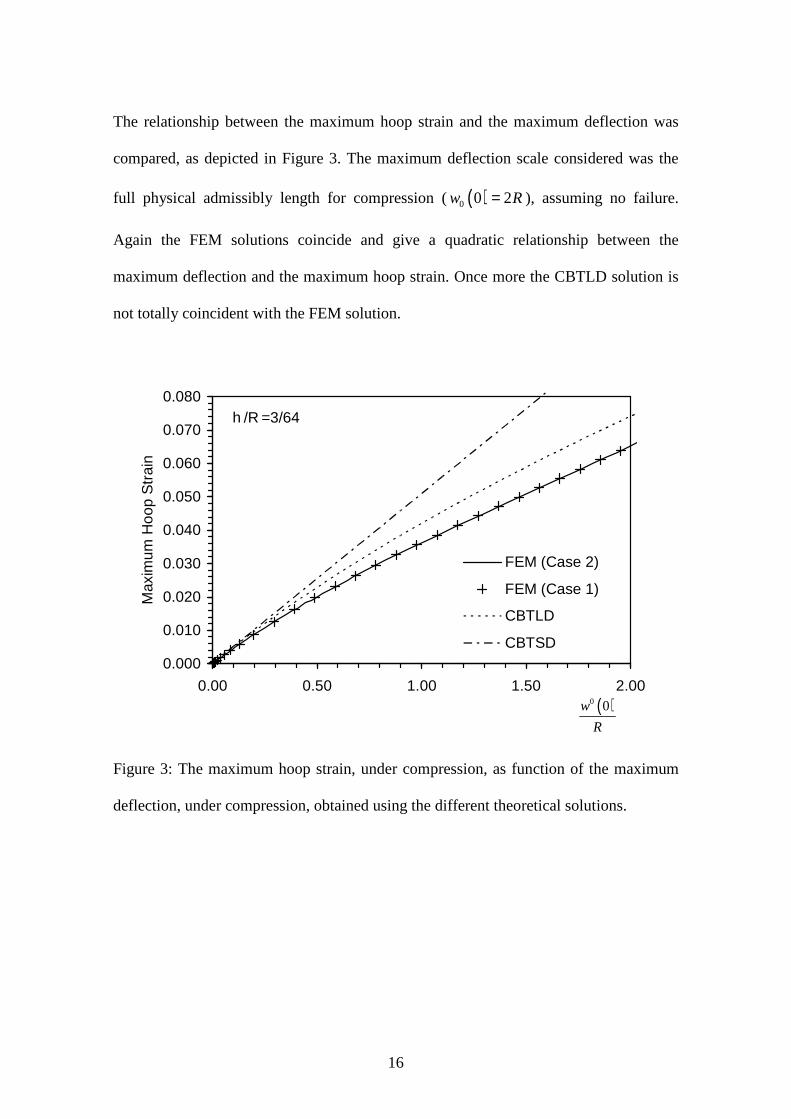
The relationship between the maximum hoop strain and the maximum deflection was
compared, as depicted in Figure 3. The maximum deflection scale considered was the
full physical admissibly length for compression (( )0 0 2w R= ), assuming no failure.
Again the FEM solutions coincide and give a quadratic relationship between the
maximum deflection and the maximum hoop strain. Once more the CBTLD solution is
not totally coincident with the FEM solution.
0.000
0.010
0.020
0.030
0.040
0.050
0.060
0.070
0.080
0.00 0.50 1.00 1.50 2.00
Max
imum
Hoo
p S
trai
n
FEM (Case 2)
FEM (Case 1)
CBTLD
CBTSD
( )0 0w
R
h /R =3/64
Figure 3: The maximum hoop strain, under compression, as function of the maximum
deflection, under compression, obtained using the different theoretical solutions.
17
EXPERIMENTAL COMPARISON AND DISCUSSION
The experimental test was performed on filament-wound glass fiber reinforced buried
pipes with a winding angle of 90º, with the following geometry b=300mm, R=256mm
and h=12mm (h/R=3/64). The elastic properties are described in Table 2. This case is of
practical interest as it is commonly used for water transportation. The standards for
buried pipe characterization apply transverse loading. For instance the standard
EN1226:1999 describes a method for testing the ability of glass-reinforced
thermosetting plastics (GRP) pipes to withstand specified levels of initial ring deflection
without displaying surface damage or structural failure. The experimental test set-up,
depicted in Figure 4, was based on that standard. The test was performed by incremental
loading where the displacement and the maximum hoop strain inside the pipe were
measured.
Table 2: Material mechanical properties
Eθ (GPa) Er (GPa) Gθr (GPa) νθr νrz
10.5 3.8 1.5 0.3 0.6
18
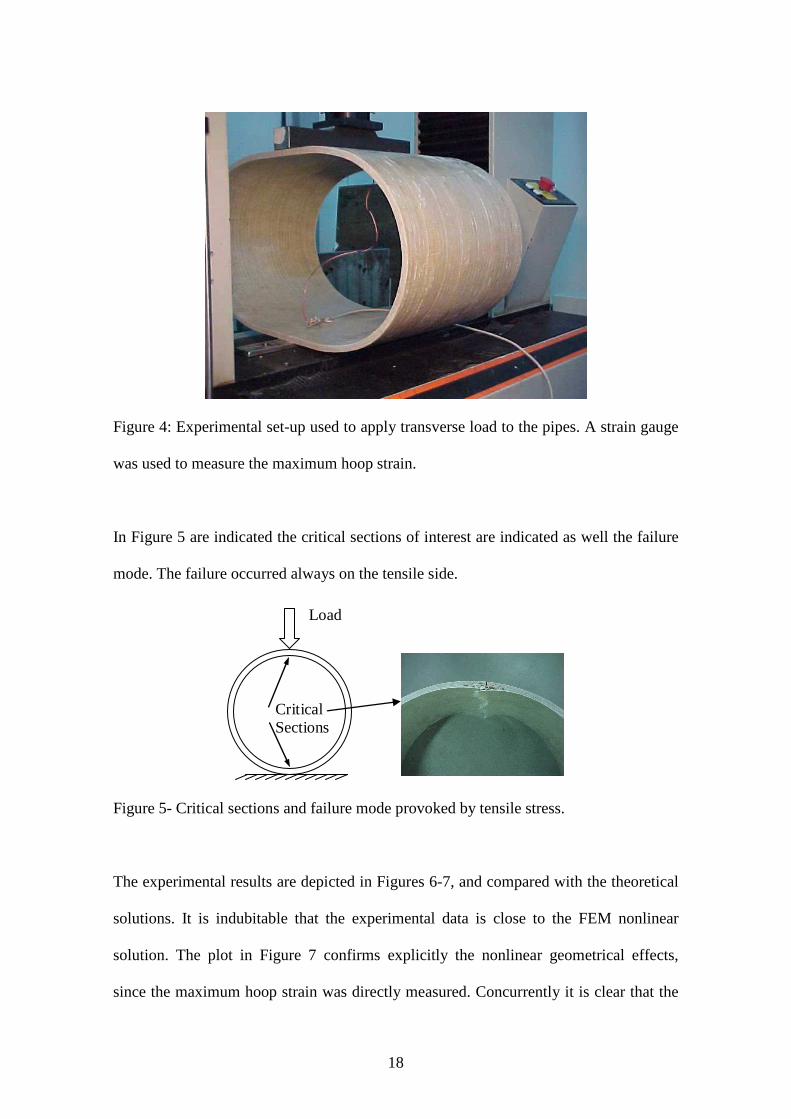
Figure 4: Experimental set-up used to apply transverse load to the pipes. A strain gauge
was used to measure the maximum hoop strain.
In Figure 5 are indicated the critical sections of interest are indicated as well the failure
mode. The failure occurred always on the tensile side.
Critical Sections
Load
Figure 5- Critical sections and failure mode provoked by tensile stress.
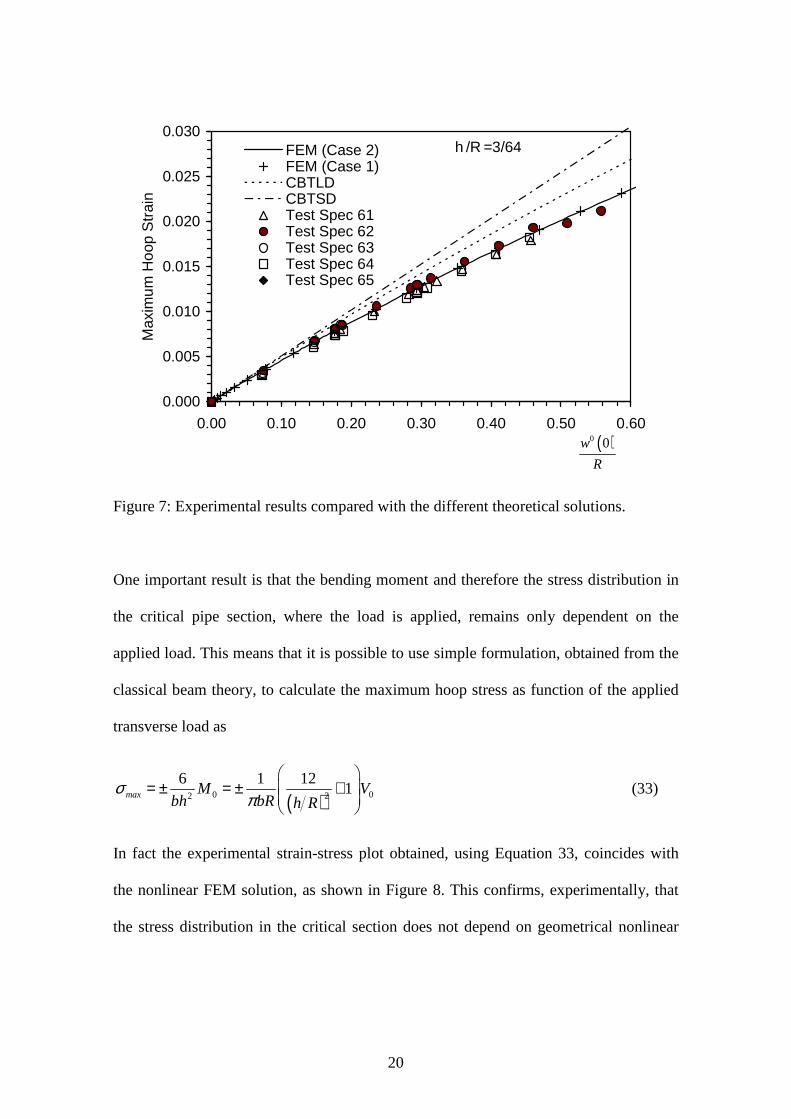
The experimental results are depicted in Figures 6-7, and compared with the theoretical
solutions. It is indubitable that the experimental data is close to the FEM nonlinear
solution. The plot in Figure 7 confirms explicitly the nonlinear geometrical effects,
since the maximum hoop strain was directly measured. Concurrently it is clear that the
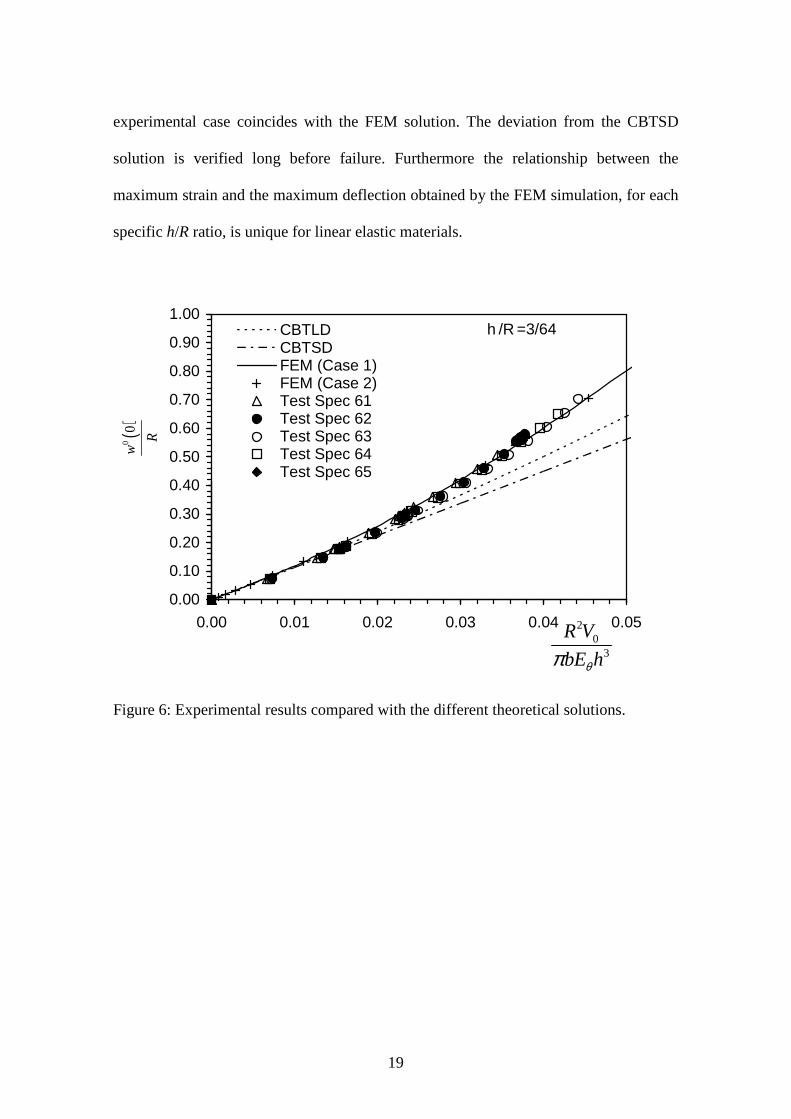
19
experimental case coincides with the FEM solution. The deviation from the CBTSD
solution is verified long before failure. Furthermore the relationship between the
maximum strain and the maximum deflection obtained by the FEM simulation, for each
specific h/R ratio, is unique for linear elastic materials.
0.00
0.10
0.20
0.30
0.40
0.50
0.60
0.70
0.80
0.90
1.00
0.00 0.01 0.02 0.03 0.04 0.05
CBTLDCBTSDFEM (Case 1)FEM (Case 2)Test Spec 61Test Spec 62Test Spec 63Test Spec 64Test Spec 65
20
3
R V
bE hθπ
()
00
w
R
h /R =3/64
Figure 6: Experimental results compared with the different theoretical solutions.
20
0.000
0.005
0.010
0.015
0.020
0.025
0.030
0.00 0.10 0.20 0.30 0.40 0.50 0.60
Max
imum
Hoo
p S
trai
nFEM (Case 2)FEM (Case 1)CBTLDCBTSDTest Spec 61Test Spec 62Test Spec 63Test Spec 64Test Spec 65
( )0 0w
R
h /R =3/64
Figure 7: Experimental results compared with the different theoretical solutions.
One important result is that the bending moment and therefore the stress distribution in
the critical pipe section, where the load is applied, remains only dependent on the
applied load. This means that it is possible to use simple formulation, obtained from the
classical beam theory, to calculate the maximum hoop stress as function of the applied
transverse load as
( )0 022
6 1 121max M V
bh bR h Rσ
π
= ± = ± +
(33)
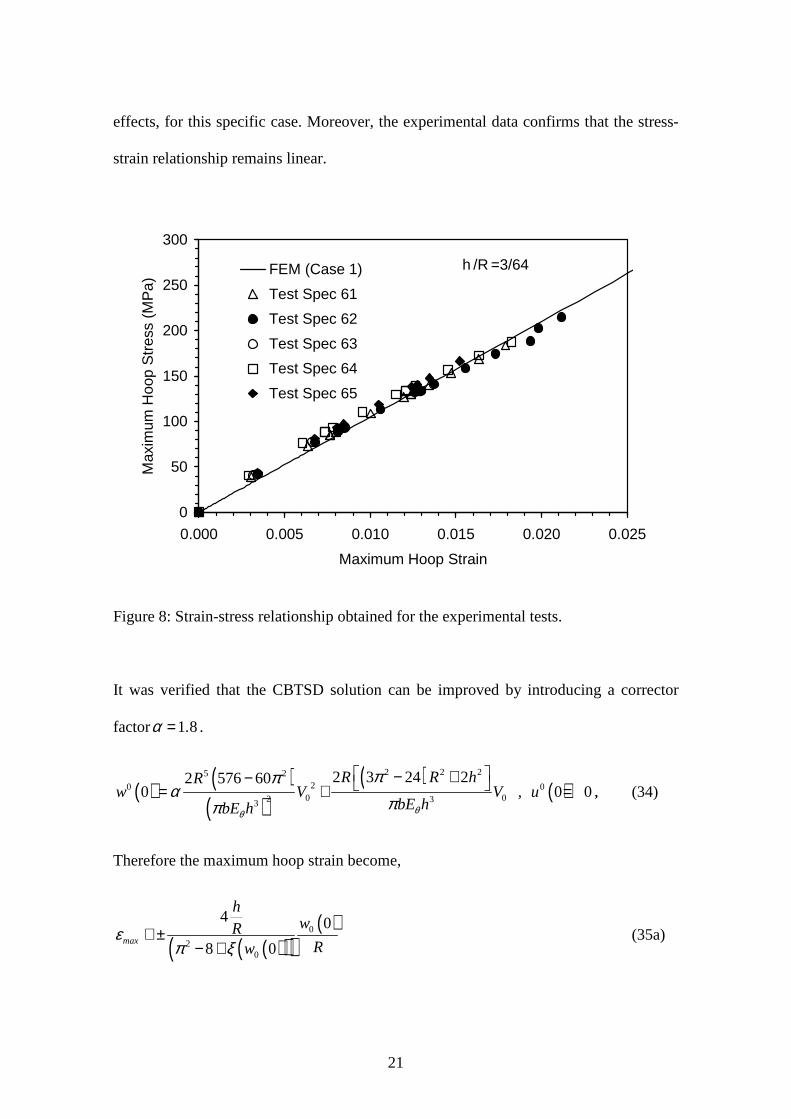
In fact the experimental strain-stress plot obtained, using Equation 33, coincides with
the nonlinear FEM solution, as shown in Figure 8. This confirms, experimentally, that
the stress distribution in the critical section does not depend on geometrical nonlinear
21
effects, for this specific case. Moreover, the experimental data confirms that the stress-
strain relationship remains linear.
0
50
100
150
200
250
300
0.000 0.005 0.010 0.015 0.020 0.025
Maximum Hoop Strain
Max
imum
Hoo
p S
tres
s (M
Pa)
FEM (Case 1)
Test Spec 61
Test Spec 62
Test Spec 63
Test Spec 64
Test Spec 65
h /R =3/64
Figure 8: Strain-stress relationship obtained for the experimental tests.
It was verified that the CBTSD solution can be improved by introducing a corrector
factor 1 8.α = .
( ) ( )( )
( )( )
2 2 25 220 0
0 02 33
2 3 24 22 576 600 0 0
R R hRw V V , u
bE hbE h θθ
ππα
ππ
− +− = + = , (34)
Therefore the maximum hoop strain become,
( )( )( )( )0
20
4 0
8 0max
hwR
Rwε
π ξ≅ ±
− + (35a)

22
where
( )( ) ( ) ( )22 20
01200 8 128
9
ww
Rξ π α π ≅ − + −
. (35b)
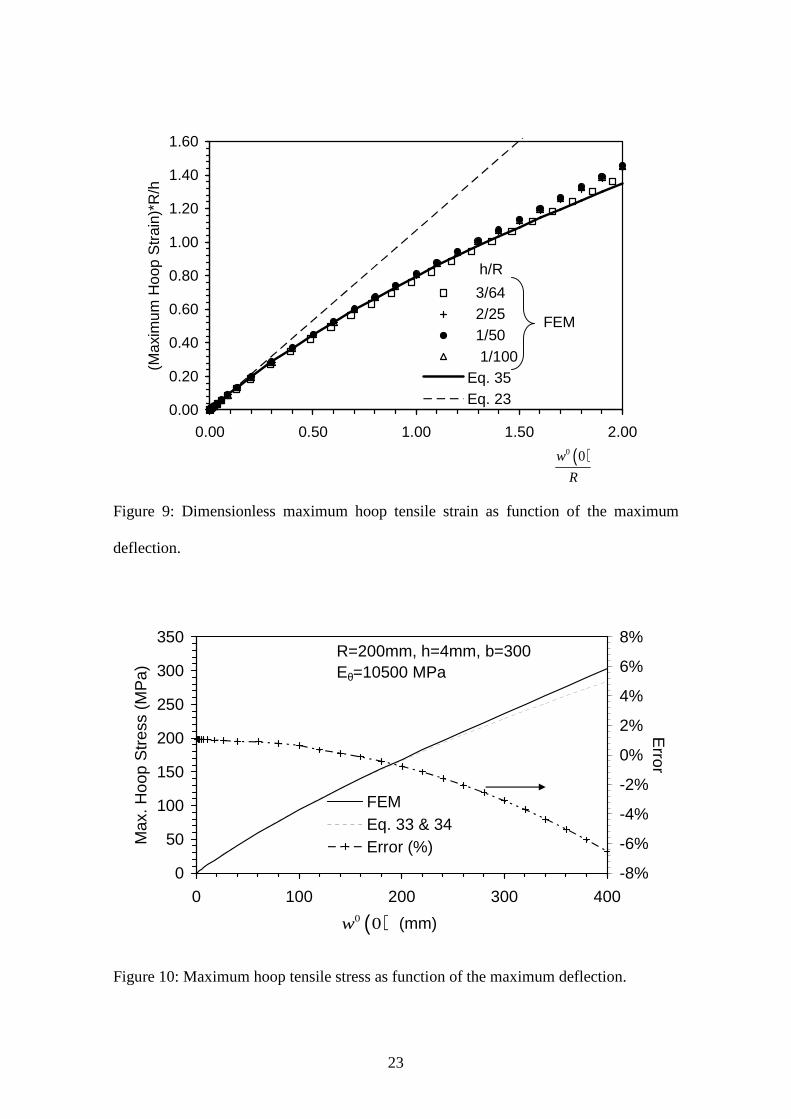
The assessment of Equation 35 was done for different h R ratios ( 0 1h R .< ). In Figure
9 the “master curve”, where the maximum strain was divided by the h R ratio, obtained
from Equation 35 is compared with nonlinear FEM simulation performed for four
different h R ratios. It was used the same mesh with the same elements as described
before. As it can be observed the corrected formula presents close results to the
nonlinear FEM. Furthermore all the FEM results collapse in this dimensionless master
curve.
Finally, in Figure 10 is compared the maximum hoop stress calculated using Equations
33 and 34 with nonlinear FEM simulation. This confirms that the maximum stress in the
critical section can be calculated using the simple expressions developed in this work.
23
0.00
0.20
0.40
0.60
0.80
1.00
1.20
1.40
1.60
0.00 0.50 1.00 1.50 2.00
(Max
imum
Hoo
p S
trai
n)*R
/h
3/64 2/25 1/50 1/100Eq. 35Eq. 23
( )0 0w
R
h/R
FEM
Figure 9: Dimensionless maximum hoop tensile strain as function of the maximum
deflection.
0
50
100
150
200
250
300
350
0 100 200 300 400
(mm)
Max
. Hoo
p S
tres
s (M
Pa)
-8%
-6%
-4%
-2%
0%
2%
4%
6%
8%
Error
FEMEq. 33 & 34Error (%)
R=200mm, h=4mm, b=300Eθ=10500 MPa
( )0 0w
Figure 10: Maximum hoop tensile stress as function of the maximum deflection.
24
CONCLUSIONS
This work had the intention to show the importance of nonlinear effects in composite
structures. In this case glass-fiber reinforced (GRP) buried pipes were analysed. These
pipes were assumed as ring structures compressed by a transverse load. It was
experimentally verified that these structures sustain large deflections without damage or
failure. Therefore the classical formulation (CBTSD), based on the small displacements
theory, cannot be used. This includes many polymer matrix fiber-reinforced composite
structures which combine high strength with relative low stiffness. A formulation, based
on finite deformations theory was proposed and solved for the present case. In order to
have an analytical integral solution, it was used a simple approximation, i. e. the
influence of geometry of the deformed state on the bending moment distribution was
not included. Although the solution (CBTLD) was not completely correct, it permitted
obtaining analytical integral expressions. From this solution it was possible to perform a
dimensionless parametric analysis. Moreover, dimensionless relationship between the
load, the maximum deflection and the maximum hoop strain was obtained.
A 2D FEM simulation using a large displacement formulation, with a very refined
mesh, was performed. Two different cases were simulated to verify the dimensionless
relationships obtained using the CBTLD. Although the CBTLD results didn’t match
exactly the FEM solution, the general solution trend of dimensionless relationships was
similar. A simple correction of CBTLD was proposed and assessed. This allowed
obtaining a simple law between maximum deflection and maximum strain at the critical
section.
25
Finally the theoretical results were compared with experimental data. It was tested a
structure of practical interest used for water transportation; filament-wound glass-fiber
reinforced buried pipes with a winding angle of 90º. The experimental results confirm
the FEM solution and validate the general trends of the CBTLD approach. These results
confirm experimentally that for some composite structures the geometrical nonlinear
effects start very early, long before damage or failure take place. Therefore direct strain
measurement becomes important, since the information from the maximum deflection is
not enough to evaluate completely the structural performance. Since ring stiffness
decrease with deflection, it is important not mistake nonlinear geometrical effects for
damage.
ACKNOWLEDGEMENTS
The research hereby presented was supported by Fundação para a Ciência e Tecnologia
(Ministério da Ciência e do Ensino Superior) through the Project
POCTI/EME/47734/2002. The valuable contributions of graduated students Hugo Faria
and Alcides Sá are also gratefully acknowledge.
REFERENCES
1. Bishopp K E and Drucker D C, 1945. Large deflections of cantilever beams Quarterly of Applied Mathematics 3 (3): 272-275.
2. Tse PC, Lai TC, So CK, 1997. A note on large deflection of elastic composite circular springs under tension and in push-pull configuration. Composite Structures 40 (3-4): 223-230.
26
3. Tse PC, Lung CT, 2000. Large deflections of elastic composite circular springs under uniaxial tension. International Journal of Non-linear Mechanics 35: 293-307.
4. Tse, P. C., Lai, T. C., So, C. K. and Cheng, C. M., 1994. Large deflection of elastic composite circular springs under uniaxial compression. International Journal of Non-linear Mechanics 29:781-798.
5. Sheinman I., 1982. Large Deflection of Curved Beam with Shear Deformation. Journal of the Engineering Mechanics Division-ASCE 108 (4): 636-647.
6. Belendez T, Neipp C, Belendez A., 2002. Large and small deflections of a cantilever beam. European Journal of Physics 23 (3): 371-379.
7. Carrillo ES., 2006. The cantilevered beam: an analytical solution for general deflections of linear-elastic materials. European Journal of Physics; 27 (6): 1437.
8. González C., LLorca J., 2005. Stiffness of a curved beam subjected to axial load and large displacements. International Journal of Solids and Structures 42(5-6):1537-1545.
9. Lim CW, Wang CM, Kitipornchai S., 1997. Timoshenko Curved Beam Bending Solutions in Terms of Euler-Bernoulli Solutions. Archive of Applied Mechanics 67:179-190.
10. Ragab A, Bayoumi S., 1999. Engineering Solid Mechanics: Fundamentals and applications. CRC Press.
11. Qatu, M. S., 1993. Theories and analysis in thin and moderately thick laminated composite curved beams. Int. J. Solids Struct. 20: 2743–2756.
12. Kreyszig Erwin, 2000. Advanced Engineering Mathematics. John Wiley & Sons, New York.
13. Williams J.G, 1980. Stress Analysis of Polymers, 2nd Edition. Ellis Hordwood series in Engineering Science.
14. Ambartsumyan SA, 1970. Theory of Anisotropic Plates. Progress in Materials Science Series, Volume 11. Editor Ashton JE. Technomic publication, USA.

27
APPENDIX A
The system of differential equations to be solved for the radial and tangential
displacements is
( ) ( )( )
( )( )
220 3
0 00 032 2 3 2 2
20 30
0 033 2 2
12 1121 1 144
212 12
12 11 144
12
R cosM Ru Rw M V
R bE hbE h R h bE h R h
R cosw Ru M V
R bE hbE h R h
θθ θ
θθ
θθθ
θθθ
− ∂ + = − + ∂ − − − ∂− + = + ∂ − (A1)
The boundary conditions are given by
( ) ( )( )
( ) ( )
0 0
0
0 00 0
0 0
0
0 0
u u
w
w wu u
π
π
πθ θ
= =
=
∂ ∂− + = − + = ∂ ∂
(A2)
The moment 0M is readily obtained using the boundary conditions,
2
0 0
2
6
R hM V
Rπ π
= − −
. (A3)
The solution of the system of differential equations is obtained using the standard
mathematical procedures (Erwin Kreyszig, Advanced Engineering Mathematics, New
York: John Wiley & Sons, 2000).
( )( )
( )
( )( )
50 2 2
23
22 2 2 20
3 2
302 3
236 108 36
288 12 36 6 2 144 54 144 288
6 24 2 3 3 12 12
Rw sin
b E h
cos cos V
sin cos cosR R V
b E h b E h
θ
θ θ
θ π π θ θπ
π θπ θ π θ θ π πθ
π θ π π θπ π θ θπ π
= − − +
− − + − − + +
− + − − + +
, (A4)

28
( )( )
( )
( )( )
50 2
23
22 2 3 20
2 2 3 2
302 3
248 288 36
36 36 144 144 12 2 288
12 6 12 3 3 122 2
Ru sin
b E h
cos sin V
cos sin sinR R V
b E h b E h
θ
θ θ
θ π θπ θπ
θπ θ π π θ π π θ θ
π θ π πθ π θπ π θ θπ π
= − − +
− − + − −
− + − − − −
, (A4)

















![André Dumans Guedes @ Fevers [Eng]](https://img.pdfslide.us/doc/110x75/55cf919f550346f57b8f0585/andre-dumans-guedes-fevers-eng.jpg)











