Embed Size (px)
DESCRIPTION
Citation preview

-1-
Abstract— As the human society steps into the aging society,
robots play more and more important roles in our daily life,
especially in nursing activities. As we all know, the human body
has numerous joints and each joint has at least one degree of
freedom. Hence, changing the attitude of human body is very
complex. In this paper, we consider the human body as a
redundant system and only interested parts of the joint states are
controlled. The new strategy proposed in this paper is able to lift
up the human body to the pre-defined position and posture while
regardless of individual differences. In addition, the convergence
analysis, including tracking time analysis and tracking error
analysis, is also given. The approach is simulated by lifting a
skeleton human model with two robot arms, which verifies the
efficiency and effectiveness of the approach.
I. INTRODUCTION
S more and more countries step into the aging society,
nursing service for elderly people becomes much more
important than ever before. Our research focuses on the
social problem and we propose to use robots to carry elderly
people in nursing care. Until now, there have been many
researches on rigid object manipulation; however, the objects
they dealt with were simple rigid objects. They did not
consider manipulating complex multi-link object like human
body [1-4]. Moreover, dealing with floating object, e.g. lifting
up human body, has also not been fully considered yet.
RI-MAN which was selected as the best invention of TIME
Magazine 2006 achieved a great success in lifting up human
body [5-7]. Some of the simulations in this paper are based on
the research of RI-MAN.
Actually, in our research the human body can be considered
as a free-floating multi-link rigid object with passive moments.
Our objective is to change the shape of the above mentioned
object by external forces. Hence, two difficulties come out:
the first one is about free-floating multi-link rigid object.
Previous studies on free-floating object are mainly in
controlling spacecraft. In these cases, the spacecraft can be
accurately modeled. Based on the precise model, various
methods, e.g. generalized Jacobian methods, can complete the
attitude control task [17]. However, in our case, the model of
Manuscript received January 29, 2010. This work was supported in part
by the Japan Society for the Promotion of Science under Grant No.
21240019.
Haiwei Dong, Zhiwei Luo and Akinori Nagano are with the Department
of Computer Science and Systems Engineering, Kobe University, Kobe,
657-8501, Japan (e-mail: [email protected]; [email protected];
human body can not be modeled accurately. That is not only
because there are some human parameters which can not be
measured, but also because human bodies have individual
differences. The second one is about external forces. As we all
know, the human body consists of 206 bones and much more
joints. Each joint has one, two or three degrees of freedom
(DOF). And each degree of freedom is described by a
differential equation. Hence, the model of human body is
really large. The calculation on such a big model is also a
tough work. Moreover, considering passive moments, the
model becomes much more complex. As the human body is
such a complex model with very high dimension, application
of external forces on the human body is also very complicated.
The calculation needs much time and real-time performance is
almost impossible. Furthermore, the process of lifting up
human body must be absolutely safe. If we can not make sure
that the computation is real-time, the safety can not be
guaranteed correspondingly.
In consideration of the two difficulties mentioned above,
the basic idea for solution comes from our daily experience.
When we lift up a human body, we do not care about the angle
of ankle, the position of hands and so on. What we do have to
care about are the position of the head, the vertical deflection
of upper limb and the angle of hip. Here we call them
“interested states”. From the view point of system theorem, we
treat the human body as a large redundant system whose
dimension can be reduced by diverting the effects of other
uninterested joints to the ones of interested joints. The newly
constructed small model of human body has very few DOF
while having huge uncertainties, unfortunately. In order to
eliminate these effects of uncertainties, robust adaptive
controller is designed. Moreover, because we assume no
priori knowledge of the human body is given in advance, the
human model estimator is built to identify the parameters of
human body. Thus, the whole attitude control approach with
human model estimation overcomes the individual differences,
such as height, weight, and so on when lifting up human body.
This paper is organized as follows. The second section
demonstrates the fundamental idea of our approach. The third
section illustrates the detailed derivation of the controller and
the estimator. The fourth section analyzes the convergence of
our strategy, including tracking error and tracking time. The
fifth section takes a normal human body for example in
simulation to test the effectiveness of the proposed approach.
Reduced Model Adaptive Force Control for Carrying Human Beings
with Uncertain Body Dynamics in Nursing Care
Haiwei Dong, Zhiwei Luo and Akinori Nagano
A
2010 IEEE/ASME International Conference onAdvanced Intelligent MechatronicsMontréal, Canada, July 6-9, 2010
978-1-4244-8030-2/10/$26.00 ©2010 IEEE 193

-2-
The sixth section concludes the whole paper.
II. FUNDAMENTAL IDEA
The problem we focus on is how to lift up a human body
from bed, and then move him (or her) to another place. As
pointed before, the problem we want to solve is how to change
the shape of a multi-link object with passive moments by
external forces. Considering the characters of human body,
the points of force application are the back and the lap of the
body. The effect of attitude change by forces is equivalent to
applying torques to the joints of the body as
1 1 2 2
T T
robJ F J Fτ = + (1)
where 1F and
2F are the forces acted by the arms of robot.
robτ is the torque equivalent to the effects by
1F and
2F .
1J
and 2J are Jacobian matrices of the human body model. Thus,
the general dynamic equations of human body can be written
as
( ) ( , ) ( )pass rob
H q q C q q q G q τ τ+ + = +&& & & (2)
where
1nq × Generalized states of human body which include
the position of head and the angles of all the
joints.
( )n n
H q × Inertia matrix. This is a symmetric and positive
semi-definite matrix which contains information
regarding the instantaneous mass distribution of
the human body model.
( , )n n
C q q ×& Centripetal and coriolis torques. The terms of
( , )C q q& contain products of angular speeds.
When the degrees of freedom are rotational, the
terms of ( , )C q q& represent the moments of
centrifugal forces.
1( )
nG q × Gravitational torques. Because ( )G q changes
with the posture configuration of the human body
model, the terms are functions of the generalized
states.
1pass nτ × Passive joint torques. It contains the torques and
moments arising from muscular activations and
passive elastic structures surrounding the human
joints.
1rob nτ × The torques acted by the robot arms, which is
controllable.
It is noted that the subscript means the dimension of matrix
(or vector). Besides, as the passive torques pass
τ is actuated
from the internal organs and tissues, pass
τ can not be
controllable.
By defining [ ]1 1, ,
mq q q= L a state vector composed of the
states of human body which we are interested in, and
[ ]2 1, ,
m nq q q+= L a state vector consisting of other states, we
can get [ ]1 2q q q= . Thus the dynamics of human body can
be rewritten as
11 12 1 11 12 1 1
21 22 2 21 22 2 2
,1 ,1
,2 ,2
pass rob
pass rob
H H q C C q G
H H q C C q G
τ ττ τ
+ +
= +
&& &
&& &
(3)
where the dimensions of sub-block matrices of 11
H , 12
H ,
21H ,
22H are m m× , ( )m n m× − , ( )n m m− × ,
( ) ( )n m n m− × − , respectively. And the dimensions of
sub-block matrices of 11
C , 12
C , 21
C , 22
C are m m× ,
( )m n m× − , ( )n m m− × , ( ) ( )n m n m− × − , respectively.
The dimensions of vectors 1
G , ,1pass
τ , ,1rob
τ are 1m× , and
2G ,
,2passτ ,
,2robτ are ( ) 1n m− × .
Extracting the parts of the dynamics of human body which we
are interested in, we get
1 1
11 12 11 12 1 ,1 ,1
2 2
pass rob
q qH H C C G
q qτ τ
+ + = +
&& &
&& & (4)
Considering that the dynamic model is time-varying, after
arranging equation (4), we obtain
( )11 1 11 1
1 12 2 12 2 ,1 ,1
( ) ( )
( ) ( ) ( ) ( ) ( )pass rob
H t q C t q
G t H t q C t q t tτ τ
+
+ + + − =
&& &
&& & (5)
By defining the inertia matrix, centripetal matrix, gravitational
matrix and torque vector of the small system as
11
11
1 12 2 12 2 ,1
,1
( ) ( )
( ) ( )
( ) ( ) ( ) ( ) ( )
( ) ( )
s
s
s pass
s rob
H t H t
C t C t
G t G t H t q C t q t
t t
τ
τ τ
=
=
= + + −
=
&& & (6)
we obtain the general mechanical form of the reduced model
of human body
( ) ( ) ( ) ( )s s s s s s
H t q C t q G t tτ+ + =&& & (7)
where the subscript s denotes the reduced system. Actually,
our basic idea is to consider the influences from uninterested
human joints (in this case from state 2q ) as perturbations. Our
idea is to change the attitude of reduced human body model
adaptively by estimating the parameters of s
H , s
C and s
G in
real time. The detailed estimation meanings are
� Estimating s
H and s
C --- make the system adaptively
adjust itself to various people with different weights.
� Estimating s
G --- eliminate the perturbations from other
uninterested joints.
Considering the basic idea above, the approach to be
proposed in our paper should be able to identify and control
the dynamics of the reduced human body model at the same
time. Assuming that the human model is totally unknown in
advance, for the safety in the nursing activity, the
identification process needs to be performed in real time. On
the other hand, the weights and heights etc. of the human
bodies are different between individuals. Hence, the strategy
also has to be able to tolerate these individual differences.
194

-3-
III. STRATEGY OF ATTITUDE CONTROL
First of all, we define some human parameter matrices for
the convenience of derivation. Define actual parameter matrix
as
T
T T T
H C GP P P P = (8)
where
11 12 1 1 2
11 12 1 1 2
1 2
Ts s s s s s
H n n n nn
Ts s s s s s
C n n n nn
Ts s s
G n
P H H H H H H
P C C C C C C
P G G G
=
=
=
L L
L L
L
and define estimation parameter vector as
ˆ ˆ ˆ ˆT
T T T
H C GP P P P = (9)
where
11 12 1 1 2
11 12 1 1 2
1 2
ˆ ˆ ˆ ˆ ˆ ˆ ˆ
ˆ ˆ ˆ ˆ ˆ ˆˆ
ˆ ˆ ˆˆ
Ts s s s s s
H n n n nn
Ts s s s s s
C n n n nn
Ts s s
G n
P H H H H H H
P C C C C C C
P G G G
=
=
=
L L
L L
L
then the estimation error matrix can be defined as
ˆP P P= −% (10)
In fact, not any combination of H , C and G corresponds
to a physical system. Therefore, the first step is to prove that
the reduced small system represents a physical system. It is
easy to prove that by proving 2s s
H C−& is a skew-symmetric
matrix, i.e. the reduced system satisfies conservation of energy
(the detailed derivation is in the proof of Theorem 1).
We proposed a theorem for changing the interested states of
the large complex human body as in Theorem 1. Theorem 1 is
composed of a control law and a parameter update law to
realize the human model attitude control and human model
parameter identification, respectively. In fact, the two
processes of control and identification run at the same time. In
the proof of Theorem 1, the global stability is shown by
proving that the derivative of Lyapunov function candidate is
less than zero.
Theorem 1
Consider a time-varying system with m-order
( ) ( ) ( ) ( )s s s s s s
H t q C t q G t tτ+ + =&& & (11)
without any pre-knowledge about s
H , s
C and s
G . The
vector ,s d
q means the desired states. Define a new vector s
as
, ,
( ) ' ( )s s s s d s s d
s q q q q q q= + Λ = − + Λ −&% % (12)
where Λ is positive diagonal matrix. From the conceptual
view of velocity, we define the reference velocity ,s r
q& as
,s r s
q q s= −& & (13)
If we choose the control law
, ,
ˆ ˆˆ ( ) ( ) ( ) sgn( )s s s r s s r s
H t q C t q G t k sτ = + + − ⋅&& & (14)
and parameter update law
1
1 , , 1 , , 1ˆ T T T T
s r n s r s r n s r nP s q s q s q s q s s− = −Γ
&&& && & &L L L (15)
under the assumption of
sgn( )T T
k s s P P⋅ > Γ% & (16)
where k and Γ are positive diagonal matrixes, sgn( )⋅ is
signal function, then the whole system tracks the desired
trajectory and the parameter matrices s
H , s
C and s
G
converge to actual values globally.
Proof:
Define a Lyapunov function candidate
( )1 1( ) 2
2 4
T T
sV t s H s P I P= + Γ +% % (17)
then the first part of ( )V t can be written as
'
,
1 1( )
2 2
T T T
s s s s s r ss H s s H q H q s H s
= − +
&&& && (18)
From equation (7), s s s s s s
H q C q Gτ= − −&& & , then
( )
'
, ,
, ,
1 1( )
2 2
1( ) ( 2 )
2
T T T
s s s s r s s s r s
T T
s s s r s s r s s s
s H s s C s q G H q s H s
s H q C q G s H C s
τ
τ
= − + − − +
= − − − + −
&& &&
&&& &
(19)
According to the previous research on mechanical system, the
system in the form of equation (2) satisfies
( )2 0Tq H C q− =&& & (20)
i.e. 2H C−& is a skew-symmetric matrix. Hence, the following
relation satisfies
( )0
22
ij ij
ji ji
if i jH C
H C otherwise
=− = − −
&&
(21)
Without loss of generality, we choose 1q& as the new state
vector in which we are interested (equation (3)) and follow the
same system simplification procedures in equation (3)-(7).
According to the relation in equation (21), the small system
satisfies
( ) ( )( ) ( )( )11 , 11 ,
11 , 11 ,
0
22
iu iv iu iv
iv iu iv iu
if iu iv
H CH C otherwise
=− =
− −
&& (22)
where 11
H and 11
C are defined in equation (3). Hence,
11 112H C−& is a skew-symmetric matrix. Based on the
definitions of s
H and s
C in (6), 2s s
H C−& is a
skew-symmetric matrix, hence
'
, ,
1( )
2
T T
s s s s r s s r ss H s s H q C q Gτ = − − −
&& & (23)
Therefore, ( )V t& can be simplified as
' '
, ,
1 1( )
2 2
ˆ( ) ( )
T T
s
T T
s s s r s s r s
V t s H s P P
s H q C q G P P Pτ
= + Γ
= − − − + − Γ
& % %
& & %&& &
(24)
195

-4-
Applying the control law (14)
2
2
, ,
, ,
, ,
2 1, , 2
1
2
ˆ ˆˆ ( ) ( ) ( ) sgn( )
0 0 0 0 1 0 0ˆ
0 0 0 0 0 1 0ˆ
ˆ0 0 0 0 0 0 1
sgn( )
sgn( )
sgn( )
s s s r s s r s
T T
s r s r
HT T
s r s r
C
GT T ms r s r m m
m
H t q C t q G t k s
q qP
q qP
Pq q
s
sk
s
τ
××
= + + −
= ⋅
−
&& &
&& &L L L
&& &L L L
M O M M O M M O M
&& &L L L
M
1m×
(25)
into ( )V t& , which leads to
( )
( )
, , , ,
, ,
1 , , 1 , ,
( )
ˆ ˆˆ ( ) ( ) ( ) ( ) ( ) ( )
ˆsgn( ) ( )
ˆ( ) ( ) ( ) sgn( ) ( )
[ ] [ ] [
T
s s r s s r s s s r s s r s
T T
T T T
s s r s s r s
T T T T
s r n s r H s r n s r C
V t
s H t q C t q G t H t q C t q G t
k s s P P P
s H t q C t q G t k s s P P P
s q s q P s q s q P
= + + − − −
− ⋅ + Γ −
= + + − ⋅ + Γ −
= + +
&
&& & && &
&% &
&% %% % &&& &
% %&& && & &L L1
]
ˆsgn( ) ( )
n G
T T
s s P
k s s P P P− ⋅ + Γ −
%L
&% &
(26)
where
, ,1 ,2 , 1
, ,1 ,2 ,1
Ts s s
s r r r r m m
Ts s s
s r r r r mm
q q q q
q q q q
×
×
=
=
&& && && &&L
& & & &L
We can obtain,
2 21 , , 1 , , 11 2 2 1
( )
ˆsgn( ) ( )
TT T T T T
s r n s r s r n s r nm m
T T
V t
P s q s q s q s q s s
k s s P P P
× × =
− ⋅ + Γ −
&
% && && & &L L L
&% &
(27)
Taking the parameter adaptation law of equation (15), finally
we obtain
( ) sgn( )T TV t P P k s s= − Γ − ⋅& % & (28)
According to the assumption of (16), ( ) 0V t <& . Hence, the
tracking error and parameter estimation error converges to
zero asymptotically.
■
The assumption (16) means that the control signal should
be, in some ways, large than the uncertainty of parameters. In
practice, the condition (16) is satisfied by giving a relative
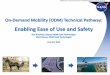
large k . The scheme illustration is shown in Figure 1.It is
noted that we use the combined error s , reference errors ,s r
q&
and ,s r
q&& to estimate the parameters s
H , s
C and s
G , while the
output signals required to measure from the physical system
are sq and
sq& . Such an adaptation scheme not only maintains
the global stability, but also leads to fast parameter
convergence and small tracking errors.
IV. CONVERGENCE ANALYSIS
First of all, assume that ,(0) (0)
s d sq q= which means there
is no “initial jump” of position and velocity between the
desired state and actual state. Let sq% be the tracking error in
the variable sq , i.e.,
,s s s d
q q q= −% (29)
Let us define a time-varying surface in the state-space nR by
the scalar equation ( ; ) 0s
s q t = , where
s s
s q qλ= +&% % (30)
Given initial assumption ,(0) (0)
s d sq q= , the problem of
tracking ,s s d
q q≡ is equivalent to the one of remaining sq% on
the surface ( )S t for all 0t > ; indeed 0s ≡ represents a
linear differential equation whose unique solution is 0sq ≡% .
Thus, the problem of tracking the n-dimensional vector ,s d
q
can be reduced to the one of keeping the scalar quantity s at
zero. More precisely, the problem of tracking the
n-dimensional vector ,s d
q can in effect be replaced by a
1st-order stabilization problem in s . Actually, the
stabilization process in s can be divided into two phases. The
fist phase is to make s approach and finally reach the
manifold ( )B t which is defined as
Signal Transform UnitAttitude Controller Human Body Model
Human Body Model Estimator
Input: Desired Attitude
Output: Actual Attitude
s
s
q
q&s s s s s sH q C q G τ+ + =&& &( ), ,
ˆ ˆˆ sgns s s r s s r sH q C q G k sτ = + + −&& &sτ
11 , , 1 , , 1
ˆ T T T Ts r n s r s r n s r nP s q s q s q s q s s
− = −Γ &
&& && & &L L L
,s dq
,s dq&
,s dq&&
Λ
Λ
Λ
+
+
s+
−
sq%
sq
sq&%
sq&
+
−
+
+
−
−,s rq&
,s rq&&
Signal Transform UnitAttitude Controller Human Body Model
Human Body Model Estimator
Input: Desired Attitude
Output: Actual Attitude
s
s
q
q&s s s s s sH q C q G τ+ + =&& &( ), ,
ˆ ˆˆ sgns s s r s s r sH q C q G k sτ = + + −&& &sτ
11 , , 1 , , 1
ˆ T T T Ts r n s r s r n s r nP s q s q s q s q s s
− = −Γ &
&& && & &L L L
,s dq
,s dq&
,s dq&&
Λ
Λ
Λ
+
+
s+
−
sq%
sq
sq&%
sq&
+
−
+
+
−
−,s rq&
,s rq&&
Fig.1 Scheme block diagram. The input signals are the desired trajectories of generalized human joints in the reduced
model. The output is the actual motion trajectories of the human body model. Our strategy controls the position and posture
of human body model and identifies the human body model online at the same time.
196

-5-
{ }( ) | ( ; )s s
B t q s q t φ= ≤ (31)
where 0φ > denotes the boundary layer thickness. The
second phase is to make s converge to the desired state
asymptotically. In the following, tracking time and static
tracking error are analyzed.
A. Tracking Time Analysis
In the proof of Theorem 1, we define the Lyapunov function
as
( ) 1 2
1 1( ) 2 ( ) ( )
2 4
T T
sV t s H s P I P V t V t= + Γ + = +% % (32)
After taking the control law (14) and parameter adaptation law
(15), we can rewrite the derivative of ( )V t as
1 2
( ) sgn( ) ( ) ( )T TV t k s s P P V t V t= − ⋅ − Γ = +& % & & & (33)
Extracting parts of the elements in 1( )V t as
2
,
1
n
k s kk
k
s H=∑ and
differentiating the ordinary element, we obtain
'
2
,
1sgn( )
2k s kk k k k k ks H k s s k s
≤ − = −
(34)
Equation (34) states that the “distance” to the surface, as
measured by 2s , decrease along all system trajectories. Thus,
it constrains trajectories to point towards the manifold ( )B t .
In detail, let reach
kt be the required time of the k th generalized
coordinate s
kq to hit the surface 0
ks = . Integrating the left
side of (34) between 0t = and reach
kt t= leads to
2 2
, ,0
1 1( 0)
2 2
reachkt
k s kk s kk k
ds H dt H s t
dt= − =∫ (35)
while the integration of the right side between 0t = and reach
kt t= can be written as
0 0( 0)
( 0)
reach reachk kt t
k k k k
reach
k k k
k s dt k s t dt
k s t t
− ≤ − =
= − =
∫ ∫ (36)
Applying the inequality relation in (34), we get the acquired
time for any generalized coordinate s
kq to get 0
ks =
,
( 0)2
s kkreach
k k
k
Ht s t
k≤ = (37)
Furthermore, manifold definition of ( )B t implies that once
on the surface, ( ) 0s t = , i.e.,
0s sq qλ+ =&% % (38)
The solution to the equation (38) is
t
sq e λ−=% (39)
which means the tracking error tends exponentially to zero
with a time constant λ as shown in Fig.2.
B. Static Tracking Error Analysis
For the static error, we can analyze the error in the second
phase. Bounds on s can be directly translated into bounds on
the tracking error vector sq% , and thus the scalar s represents
a true measure of tracking performance. Indeed, by definition
(30), the tacking error sq% is obtained from s through a
first-order lowpass filters (Fig.3), where /p d dt= is the
Laplace operator.
Fig.2 Position error of one human joint in the second phase.
The error between the desired state and actual state of the
joints in human body decrease to zero exponentially.
Fig.3 Relation between ,s k
q% , ,s k
q&% and ks (1 k n≤ ≤ ) in the
Laplace field. It is possible to get the upper bound of joint
angle by integration from the knowledge of Laplace
transform.
Assuming that (0) 0sq =% and ( )s t φ< , for the first
element of ,1( )
sq t% , we have
1 ( )
,1 10
( ) ( )t
t T
sq t e s T dT
λ− −= ∫% (40)
According to the above assumption, ( ) (1 )k ks t k nφ< ≤ ≤
the upper bound of ,1( )
sq t% can be obtained
( )
1 1 1
1
( ) 1,1 1
01 0
1 1
1 1
( )
1
T tt
t T T t
s
T
t
q t e dT e
e
λ λ λ
λ
φφ
λ
φ φλ λ
=
− − − −
=
−
≤ =
= − ≤
∫%
(41)
The derivation is the same of ,s k
q% , where 1 k n≤ ≤ . In all, we
obtain
, ( ) (1 )ks k
k
q t k nφλ
≤ ≤ ≤% (42)
We rewrite the lowpass filter unit as
1
1
p λ+1s ,1sq%
L1
p
p λ+ ,1sq&%
1
np λ+ns ,s nq%
n
p
p λ+ ,s nq&%
0 1 2 3 4 50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
( )t s
,s kq%
197

-6-
1p
p p
λλ λ= −
+ + (43)
Then the upper bounds of derivatives of ,1s
q% can be obtained
as
( )1 1 11
,1 1 1 1 10
1
( ) ( ) 1 1 2t
T t t
sq t s t e dT e
λ λ λλλ φ φ
λ− −
≤ − = + − ≤
∫&% (44)
Applying the same derivation to the other generalized joints,
we obtain
, ( ) 2 1s k kq t k nφ≤ ≤ ≤&% (45)
V. SIMULATION
In the simulation, we use AUTOLEV to construct the model
of human body [8-10] and output the model as a MATLAB
code. After that, we insert our own strategy codes, including
parameter identification of the human model and attitude
control, into the MATLAB code. By running the code, we get
all the information about the positions, velocities and
accelerations of the human model. The animation is done
based on these data with VORTEX where the skeleton model
is constructed by connecting the bones composed of polygon
points. It is noted that in the simulation, we assume the robot
can realize perfect force control.
A. Configuration of Human Body Model
In the simulation, we take a normal human body model into
account which is composed of 16 parts, including head, chest,
mid-trunk, lower-trunk, upper arms (left and right), lower
arms (left and right), hands (left and right), upper legs (left and
right), lower legs (left and right) and feet (left and right). Each
two parts (or two links) are connected by one joint. According
to the physiological structure of the human body, the joints
vary from one DOF to three DOF. In all, the human body
model we considered has 35 DOF with 1.7142m height and
72.81kg weight [10].
There are passive joint moments corresponding to the
constriction forces and moments developed by ligaments,
joint capsules and other soft tissues around the joints. Based
on the previous researches [11-15], we use the passive
moment pass
τ in the simulation as
( ) ( )q q q q
passe eβ βτ α α+ + − −− −
+ −= + (46)
where q+ and q− are the threshold angles beyond which the
passive moment takes effect. α+ and α− denote how
sensitive the passive moment is and β+ and β− denote what
magnitude level the passive moment is. In Fig.6, it is shown
that α+ and α− decide the steepness of the curve and β+ and
β− determine the vertical extension of the curve. The passive
moment is small in the interval [ , ]q q− + and it becomes large
very quickly in the interval [ , ]q+ +∞ or [ , ]q−−∞ as shown in
Fig.4. In the simulation, the passive moments are implemented
in the joints of chest-midtrunk, midtrunk-lowertrunk,
lowertrunk-upperleg, upperleg-lowerleg and lowerleg-foot.
−0.5 0 0.5−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1x 10
5
q (rad)
Passiv
e m
om
ent (k
g.m
2)
q+
q−
Fig.4 Curve of passive moment. The parameters are set as
0.175q+ = , 0.175q− = − , 0.085α+ = , 0.085α− = ,
30.72β+ = , 30.72β− = − . It is easy to see that the value of
passive moment in the interval of [ , ]q q− + is very small while
increasing rapidly outside that interval.
As we all know that the human joint can not rotate from 0
degrees to 360 degrees. For example, when we turn around
our head, the neck can only rotate in the interval
[ / 2 / 2]π π− . For the other joints with no passive moment
models available in the literature, it is necessary to make sure
the angles of these joints are in the reasonable range. Hence,
similar with the form of passive moment (46), we take passive
angle joint constraint as
( ) ( )
_
q q q q
ang conte e qβ βτ α α γ+ + − −− −
+ −= + − & (47)
where the passive term qγ− & acts as a damping component.
B. Simulation Process
The simulation is implemented by three software packages,
including AUTOLEV, MATLAB and VORTEX. The
detailed usage is explained as follows. AUTOLEV is used to
construct the dynamic model of human body for further
computation. As MATLAB is very powerful in computing, we
choose it to do the main computation tool for solving ordinary
differential equations; Although VORTEX is able to do
physical simulation, the programming grammar is a bit
complex. Hence, we only use its stereoscopic presentation
function to make animations.
As illustrated before, the total DOF of the human body is 35.
But in the case of lifting up human body, we are interested in
only three states: the position of the head and the lower-trunk
angle drift off the horizontal line and the angle between
lower-trunk and upper-leg (Fig.5). The animation of lifting up
human body in our approach is shown in Fig.6. At the
beginning of the simulation, we assume that we do not have
any pre-knowledge about the human body. Hence, the initial
values of ˆs
H , ˆs
C and ˆs
G are set to zero matrices (or zero
vectors). As the estimation of the human body goes on, ˆs
H , ˆs
C and ˆs
G converge to their true values of s
H , s
C and s
G .
198

-7-
Fig.5 Three interested states. During the attitude control of
human body, not all of the motions are necessary to be
considered. In the proposed approach, three interested states
are chosen as the position of the head, the lower-trunk angle
drift off the horizontal line and the angle between lower-trunk
and upper-leg.
The energy, position and angle graphs are shown in Fig.7. It
is easy to see that it takes about 1 second to accomplish the
attitude change of human body. There is a peak of kinematics
energy at the time of about 0.2 second, which means at that
time, the attitude changes very quickly (Fig.7 (a)). That is
because we assume no priori knowledge of the human body at
the beginning of the simulation. Moreover, the main
identification process completes within a short time (about 0.2
second), which guarantees the safety in nursing care.
We set the desired position of the head as (0.2m, 0.8m,
0.01m). Compared with other joints rotating in x or y direction,
the joints rotating in z direction turn significantly. For this
reason, the angle changes of these joints affect the head
position in x direction greatly (Fig.7 (b)).
In the proof of Theorem 1, it was shown that 2s s
H C−& is a
skew-symmetric matrix which indicates that parts of the states
(or their linear combination ) can be controlled as a new
physical system. In the simulation, we construct a new state
which is the angle sum of head, chest, mid-trunk and
lower-trunk. The angle drift off the horizontal line of the new
state changes to -0.7854 rad (i.e. -45 degrees) as shown in
Fig.7 (c). And the angle between lower-trunk and upper-leg
changes to 1.5708 rad (i.e. 90 degrees) at the time of 1 second
(Fig.7 (d)). The above tracking results also indirectly prove
that the estimations of s
H , s
C , s
G converge to their actual
values.
VI. CONCLUSION
In this paper, a new reduced model adaptive force control
approach for carrying human beings was proposed. Compared
with previous approaches, there are two significant
advantages in our strategy. First is that it is not necessary to
measure the anthropological parameters of human body, like
height and weight, in advance because our strategy can
identify the anthropological parameters of human body online.
Second is that attitude control law guarantees the
manipulation accuracy. Moreover, the robust controller which
we used also can tolerate the uncertainty of human body
model. The proposed approach is analyzed completely from
the viewpoint of algorithm convergence. From the analysis
results of tracking time and tracking error, the approach is
reliable. The simulation verifies our approach by lifting up a
normal human body (35 DOF) with passive moments. It is
highlighted that the approach proposed in this paper is not
only designed for the case of lifting up human body but also
can be used much more widely for controlling various
dynamics of human body.
REFERENCES
[1] P. Radetsky, “The man who mastered motion,” Science, vol. 7, pp.
52-60, 1986.
[2] Z. W. Luo, K. Ito, A. Kato and M. Ito, “On cooperative manipulation of
dynamic object,” Advanced Robotics, vol. 10, pp. 621-636, 1996.
[3] F. Asano, Z. W. Luo, M. Yamakita and S. Hosoe, “Dynamic modeling
and control for whole body manipulation,” in Proc. IEEE Int. Conf.
Robot. Autom., 2003, pp. 3162-3167.
[4] P. Song, M. Yashima and V. Kumar, “Dynamics and control of whole
arm grasps,” in Proc. IEEE Int. Conf. Robot. Autom., 2001, pp.
2229-2234.
[5] T. Mukai, M. Onishi, T. Odashima, S. Hirano, Z. W. Luo,
“Development of the tactile sensor system of a human interactive robot
‘RI-MAN’,” IEEE Trans. on Robotics, vol. 24, pp. 502-512, 2008.
[6] M. Onishi, Z. W. Luo, T. Odashima, S. Hirano, K. Tahara, T. Mukai,
“Generation of human care behaviors by human-interactive robot
RI-MAN,” in Proc. IEEE Int. Conf. Robot. Autom., 2007, pp.
3128-3129.
[7] T. Odashima, M. Onishi, K. Tahara, K. Takagi, F. Asano, Y. Kato, H.
Nakashima, Y. Kobayashi, T. Mukai, Z. W. Luo, S. Hosoe, “A soft
human-interactive robot RI-MAN,” in Video Proc. IEEE Int. Conf.
Robot. Sys., 2006, v018.
[8] T. R. Kane and D. A. Levinson, Dynamics: Theory and Applications.
McGraw-Hill, 1985.
[9] A. Nagano, R. Himeno and S. Fukashiro, “An introduction to
three-dimensional rigid body dynamics: (4) Simulation using an
assisting software package,” Japanese Journal of Biomechanics in
Sports and Exercise, vol. 8, pp. 209-223, 2004.
[10] A. Nagano, S. Yoshioka, T. Komura, R. Himeno and S. Fukashiro, “A
three-dimensional linked segment model of the whole human body,”
International Journal of Sport and Health Science, vol. 3, pp. 311-325,
2005.
[11] P. D. Leva, “Adjustment to zatsiorsky-seluyanov’s segment inertia
parameters,” Journal of Biomechanics, vol. 29, pp. 1223-1230, 1996.
[12] D. A. Winter, Biomechanics and Motor Control of Human movement.
John Wiley & Sons, Inc., 1990.
[13] S. L. Delp, Surgery Simulation: A Computer Graphics System to
Analyze and Design Musculoskeletal Reconstructions of the Lower
Limb. Stanford University, 1990.
[14] F. C. Anderson and M. G. Pandy, “A dynamic optimization solution for
vertical jumping in three dimensions,” Computer Methods in
Biomechanics and Biomechanical Engineering, vol. 2, pp. 201-231,
1999.
[15] G. T. Yamaguchi, Dynamic Modeling of Musculoskeletal Motion: A
Vectorized Approach for Biomechanical Analysis in Three Dimensions.
Kluwer Academic Publishers, 2001.
[16] J. J. E. Slotine and W. Li, Applied Nonlinear Control. Prentice Hall,
1991
[17] Y. Umetani and K. Yoshida, “Resolved motion rate control of space
manipulators with generalized Jacobian matrix,” IEEE Ttrans. on
Robotics and Automation, vol. 5, pp. 303-314, 1989.
199

-8-
(a) (b) (c)
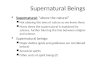
(d) (e)
Fig.6 Animation of the attitude control of the human skeleton model. The five snapshots labeled from (a) to (e) are taken in
the equivalent time interval, which represent the whole process of lifting up human body.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
200
400
Kin
em
atic e
ne
rgy (
J)
Energy of the simplified human model
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2−500
0
500
Po
ten
tia
l e
ne
rgy (
J)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2−500
0
500
Time (s)
To
tal e
ne
rgy
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.2
0.4
X d
ire
ctio
n (
m)
Position of the head
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.5
1
Y d
ire
ctio
n (
m)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.005
0.01
0.015
Z d
ire
ctio
n (
m)
Time (s)
(a) ( b)
0 0.5 1 1.5 2−1
−0.5
0
0.5
1
Angle
(ra
d)
Angle and volicity off the hirizontal line of lower−trunk
0 0.5 1 1.5 2−6
−4
−2
0
2
Time (s)
Volic
ity (
rad/s
)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.5
1
1.5
2
Angle
(ra
d)
Angle and velocity of the joint of lowertrunk−upperleg
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2−0.5
0
0.5
1
1.5
2
2.5
time
Velo
city (
rad/s
)
(c) (d)
Fig.7 Energy and angle change with time when the human body is lifted up. (a) The change of energy. (b) The position of the
head. (c) The lower-trunk angle and angular velocity drift off the horizontal line. (d) The angle and angular velocity of the
joint between lower-trunk and upper-leg.
200