Embed Size (px)
Citation preview
Phenomenology of large scale structure
Ravi K Sheth (ICTP/UPenn)
• The Halo Model–Observations/Motivation
• The Excursion Set approach–The ansatz–Correlated steps–Large scale bias–Ensemble averages: Halos and peaks–Modified gravity


Galaxy spatial distribution depends on galaxy type (luminosity, color, etc.)
Not all galaxies can be unbiased tracers of the underlying Mass distribution
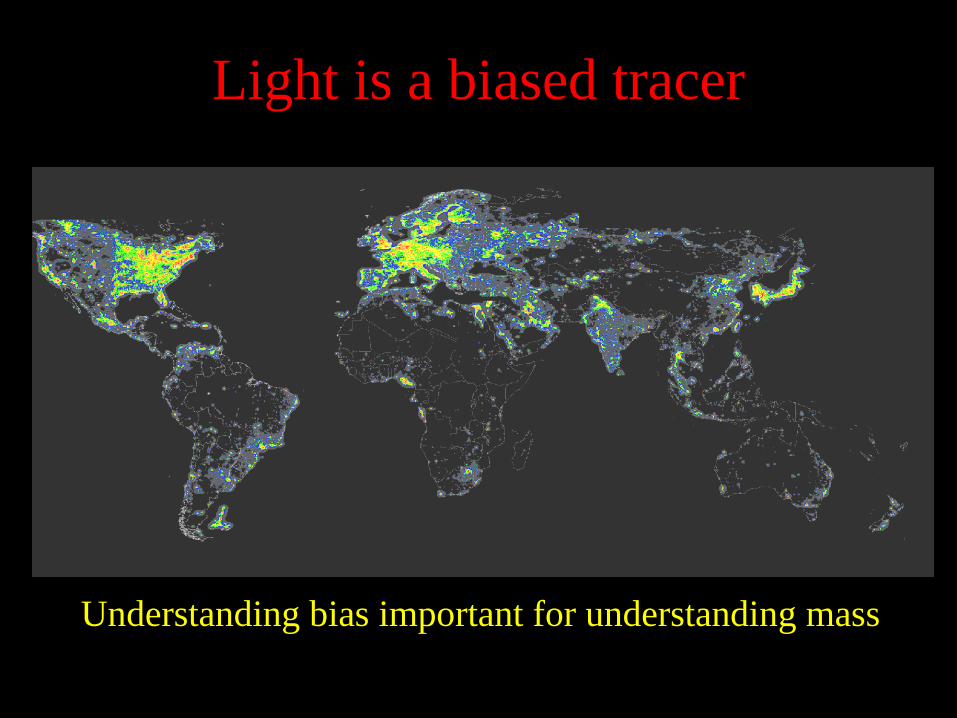
Light is a biased tracer
Understanding bias important for understanding mass

How to describe different point processes which are all built from the same underlying distribution?
THE HALO MODEL
Center-satellite process requires knowledge of how 1) halo abundance; 2) halo clustering; 3) halo profiles; 4) number of galaxies per halo; all depend on halo mass.
(Revived, then discarded in 1970s by Peebles, McClelland & Silk)

The halo-model of clustering• Two types of pairs: both particles in same halo, or
particles in different halos
• ξobs(r) = ξ1h(r) + ξ2h(r)
• All physics can be decomposed similarly: ‘nonlinear’ effects from within halo, ‘linear’ from outside
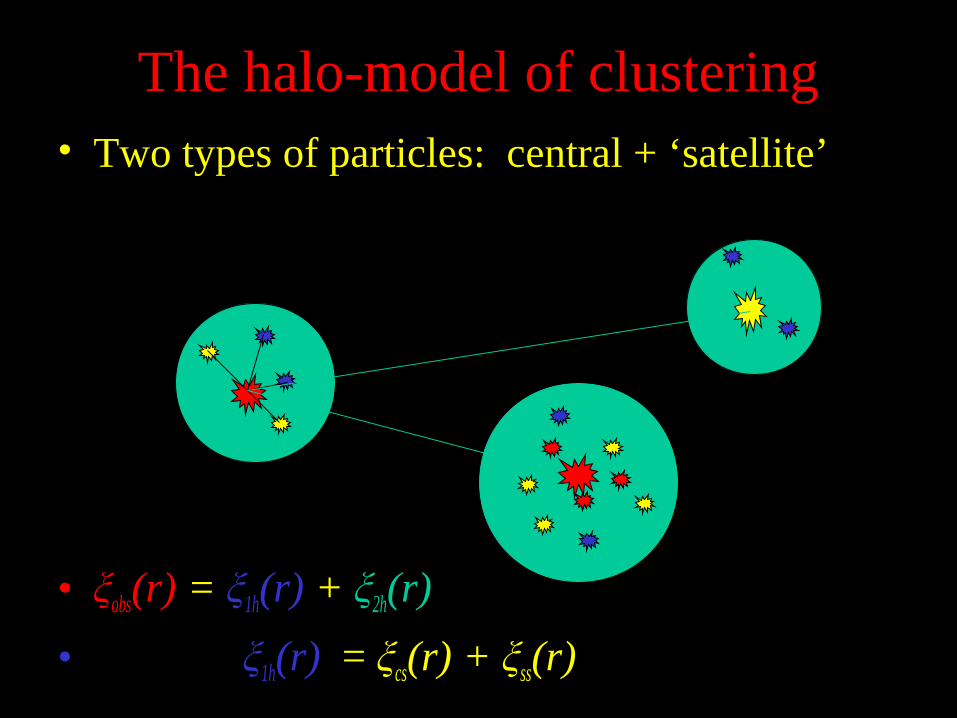
The halo-model of clustering• Two types of particles: central + ‘satellite’
• ξobs(r) = ξ1h(r) + ξ2h(r)
• ξ1h(r) = ξcs(r) + ξss(r)

To implement Neyman-Scott program
need model for cluster abundance
and cluster clustering
Next generation of surveys will have 109 galaxies in105 clusters
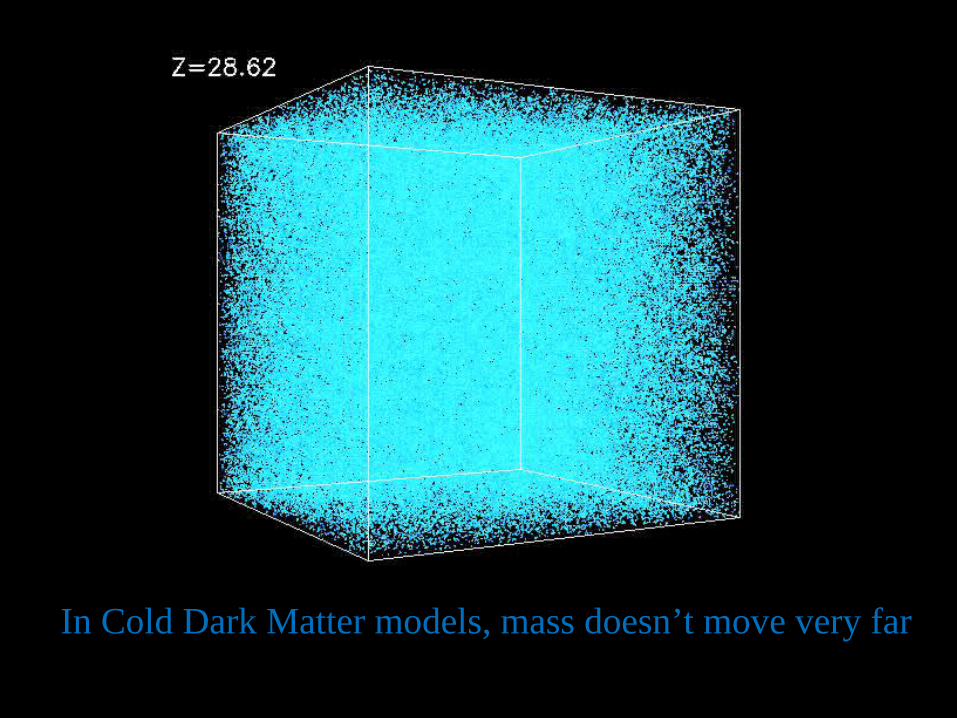
In Cold Dark Matter models, mass doesn’t move very far
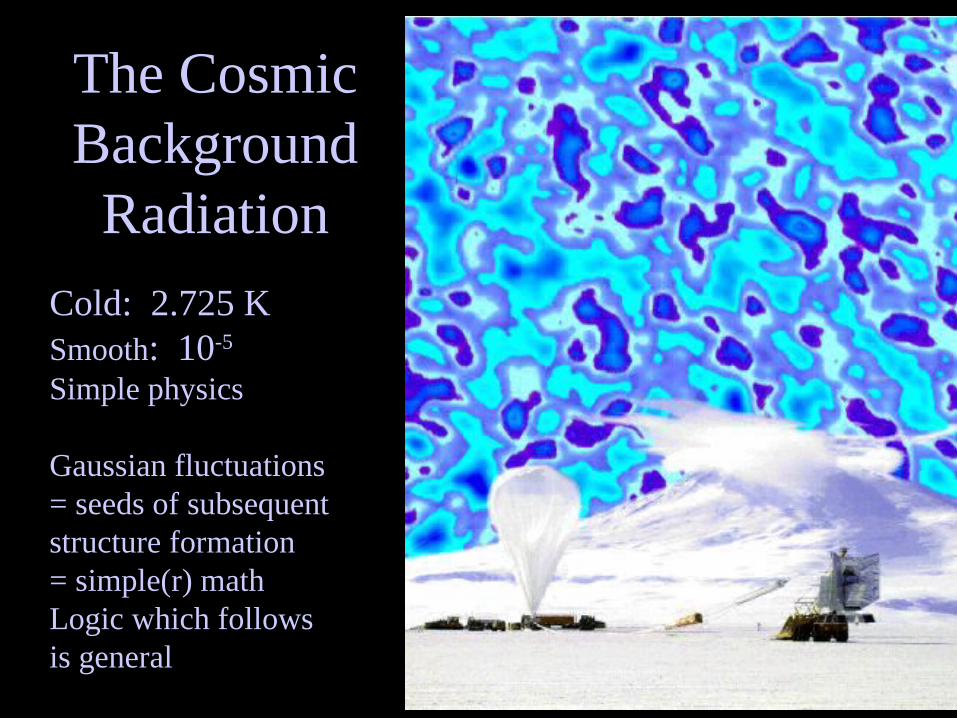
The Cosmic Background
Radiation
Cold: 2.725 KSmooth: 10-5
Simple physics
Gaussian fluctuations = seeds of subsequent structure formation = simple(r) mathLogic which follows is general

Birkhoff’s theorem important

Use initial conditions (CMB) +
model of nonlinear gravitational clustering
to make inferences about late-time, nonlinear structures

Hierarchical clustering in GR
= the persistence of memory
THE EXCURSION SET APPROACH
(Epstein 1983; Bond et al. 1991; Lacey & Cole 1993; Sheth 1998; Sheth & van de Weygaert 2004; Shen et al. 2006)


N-body simulations of
gravitational clustering
in an expanding universe
Assume a spherical cow …
(Gunn & Gott 1972)
Spherical evolutionvery well approximated by ‘deterministic’ mapping …
(Rinitial/R)3 = Mass/(ρcomVolume) =
1 + δ ≈ (1 – δ0/δsc)−δsc
…which can be inverted:
(δ0/δsc) ≈ 1 – (1 + δ) 1/− δsc

δcrit
δ0(M/V)
Linear theory over-density
MASS
Halo of mass m<M within this patch (M,v)
This patch of volume v contains mass M
The Nonlinear PDF
V v
• Halo mass function is distribution of counts in cells of size v→0 that are not empty.
• Fraction f of walks which first cross barrier associated with cell size V at mass scale M,
f(M|V) dM = (M/V) p(M|V) dM where p(M|V) dM is probability randomly placed cell
V contains mass M.
• Note: all other crossings irrelevant → stochasticity in mapping between initial and final density

Higher RedshiftCritical
over-density
MASS
smaller mass patch within more massive region
This patch forms halo of mass M
The Random Walk Model

From Walks to Halos: Ansätze
• f(δc,s)ds = fraction of walks which first cross δc(z) at s
≈ fraction of initial volume in patches of comoving volume V(s) which were just dense enough to collapse at z
≈ fraction of initial mass in regions which each initially contained m =ρV(1+δc) ≈ ρV(s) and which were just dense enough to collapse at z (ρ is comoving density of background)
≈ dm m n(m,δc)/ρ

High-z
Low-zover-density
MASS
small mass at high-z
larger mass at low z
Random Walk = Accretion history
Major merger
‘sm
ooth
’
accr
etion
Time evolution of barrier depends on cosmology
Mapping between σ2 and M depends on P(k)
σ2(M)
Simplification because…
• Everything local• Evolution determined by cosmology (competition
between gravity and expansion)• Statistics determined by initial fluctuation field:
since Gaussian, statistics specified by initial power-spectrum P(k)
• Fact that only very fat cows are spherical is a detail (crucial for precision cosmology); in excursion set approach, mass-dependent barrier height increases with distance along walk
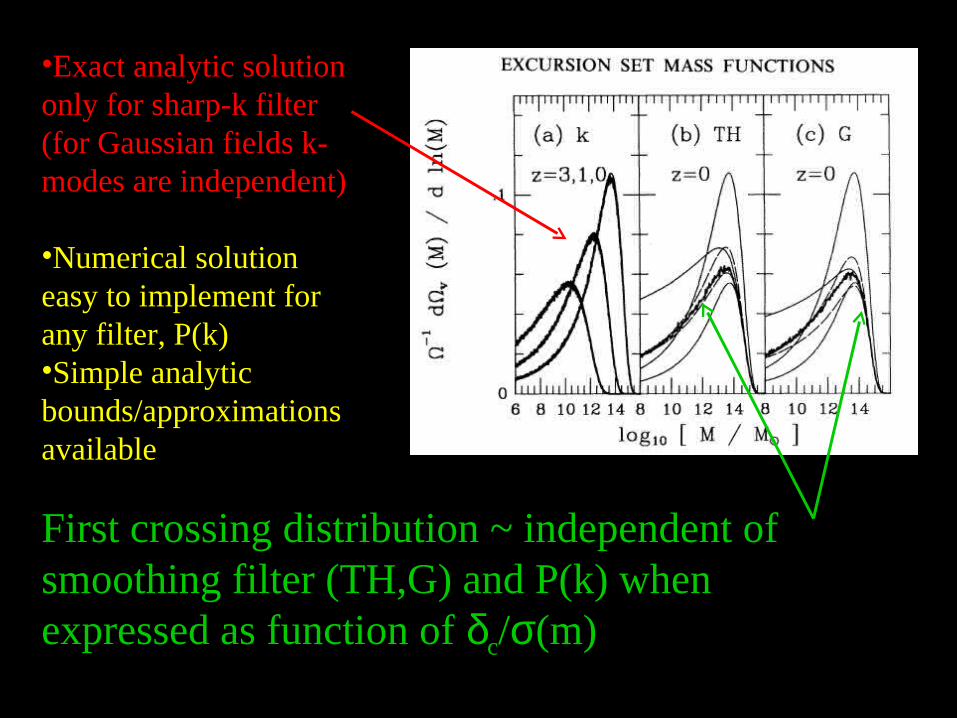
First crossing distribution ~ independent of smoothing filter (TH,G) and P(k) when expressed as function of δc/σ(m)
•Exact analytic solution only for sharp-k filter (for Gaussian fields k-modes are independent)
•Numerical solution easy to implement for any filter, P(k)•Simple analytic bounds/approximations available

Assumptions of convenience• Uncorrelated steps
– Correlated steps (Peacock & Heavens 1990; Bond et al. 1991;
Maggiore & Riotto 2010; Paranjape et al. 2011)
– Non-Gaussian mass function (Matarrese et al. 2001) ~ given by changing PDF but keeping uncorrelated steps (Lam & Sheth 2009)
• Barrier is sharp – Fuzzy/porous barriers (Sheth, Mo, Tormen 2001; Sheth
&Tormen 2002 ; Maggiore & Riotto 2010; Paranjape et al 2011)
• Ensemble of walks is also random – The real cloud-in-cloud problem
Peacock-Heavens approximation
• Steps are correlated– correlation length scale depends on smoothing window
and Pk– correlation length on scale s is Γs with Γ ~ 5– steps further apart than this length are ~ independent
• Survival probability (to have not crossed) is
P (sn) ≈ ∏in p(<δc|si)
= p(<δc|s) exp[0∫sds/sΓ ln p(<δc|s)]
First crossing distribution is -∂P / s.∂

Critical
over-density
MASS
Typical mass smaller at early times: hierarchical clustering
Completely correlated steps

Critical
initialover-density
MASS
Easier to get here from over-dense environment
This patch forms halo of mass M
Correlations with environment
over-dense
under-dense
‘Top-heavy’ mass function in dense regions
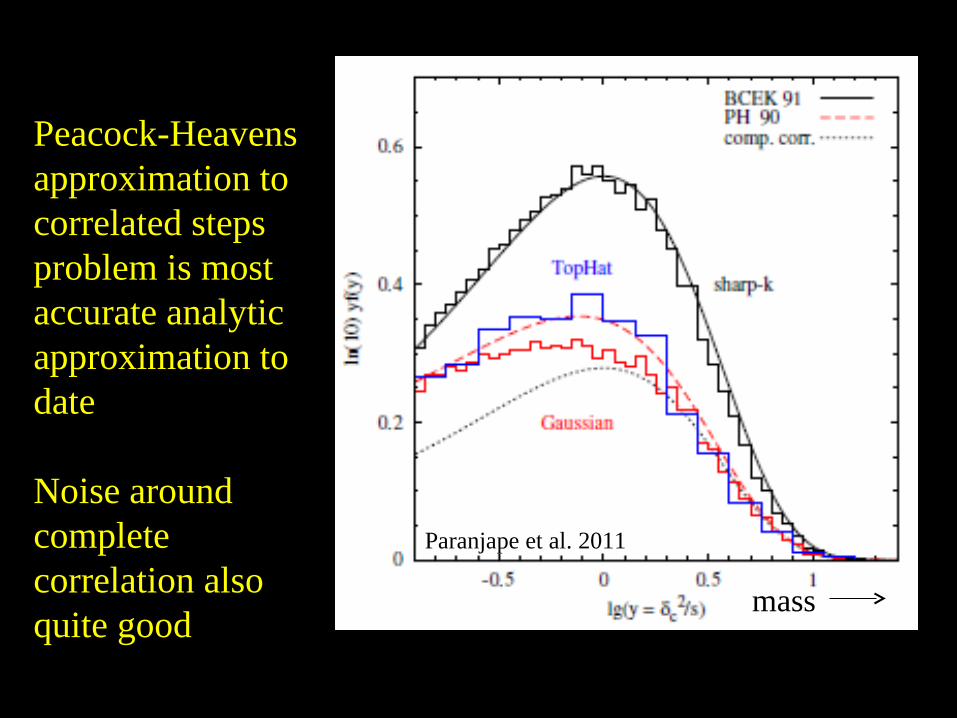
Paranjape et al. 2011
Peacock-Heavens approximation to correlated steps problem is most accurate analytic approximation to date
Noise around complete correlation also quite good
mass

Extensions (Paranjape, Lam, Sheth 2011)
– conditional distributions (environmental trends)– large-scale bias – can both be understood as arising from fact that
p(x|y) = Gaussian with <x|y> = y <xy>/<yy>– so simply make this replacement in PH expressions– moving barriers (ellipsoidal collapse, PDF),

• Generalization of PH to constrained walks:
p(<δc|s) p(<→ δc,s|δ0, S0)
is trivial and accurate
δ1 – (Sx/S0) δ0
ν10 = ------------------ √S1- (Sx/S0)2 S0
• Read fine print (and correct the typos!) in Bond et al. (1991)
mass
ν10 =
δ1 – (Sx/S0) δ0----------------------------------------
√S1- (Sx/S0)2 S0
N.B.: Sx/S0 1≠

Large scale bias
• f(m|δ0)/f(m) – 1 ~ f(ν10)/f(ν) – 1
~ (Sx/S) b(ν) δ0
where b is usual (Mo-White) bias factor
• So, real space bias should differ from Fourier space bias by factor (Sx/S)
• N.B. exactly same effect seen for peaks (Desjacques et al. 2010); in essence, this is same calculation as the ‘peak’ density profile (BBKS 1986)
Real and Fourier space measures of bias
should differ, especially for most
massive halos
Basis for getting scale dependent bias from
excursion set approach
Assembly bias from <δ0, S0 | δc, S1, δf, Sf>
Paranjape & Sheth 2011
Tophat
sharp-k

Most of apparent difference is due to difference between real and Fourier space bias
Real difference in Fourier space bias is small – but significant at small masses
Massive halos more strongly
clustered
‘linear’ bias factor on large scales increases monotonically with halo mass
Hamana et al. 2002
Luminosity dependent clustering from mass dependence of halo bias
Zehavi et al. 2005 SDSS
• Deviation from power-law statistically significant• Centre plus Poisson satellite model (two free parameters) provides good description

Summary• Intimate connection between abundance and
clustering of dark halos– Can use cluster clustering as check that cluster mass-
observable relation correctly calibrated– Almost all correlations with environment arise through halo
bias (massive halos populate densest regions)
• Next step in random walk ~ independent of previous – History of object ~ independent of environment– Not true for correlated steps
• Description quite detailed; sufficiently accurate to complete Neyman-Scott program (The Halo Model)
Success to date motivates search for more accurate
(better than 10%) models of halo
abundance/clustering:
Quest for Halo Grail?
Work in progress• Correlated steps
– Assembly bias
• Correlated walks – What is correct ensemble?
– Generically increase high-m abundance (ST99 parameter ‘a’)
• Dependence on parameters other than δ – Higher dimensional walks
– What is correct basis set? (e,p)? (I2,I3)?
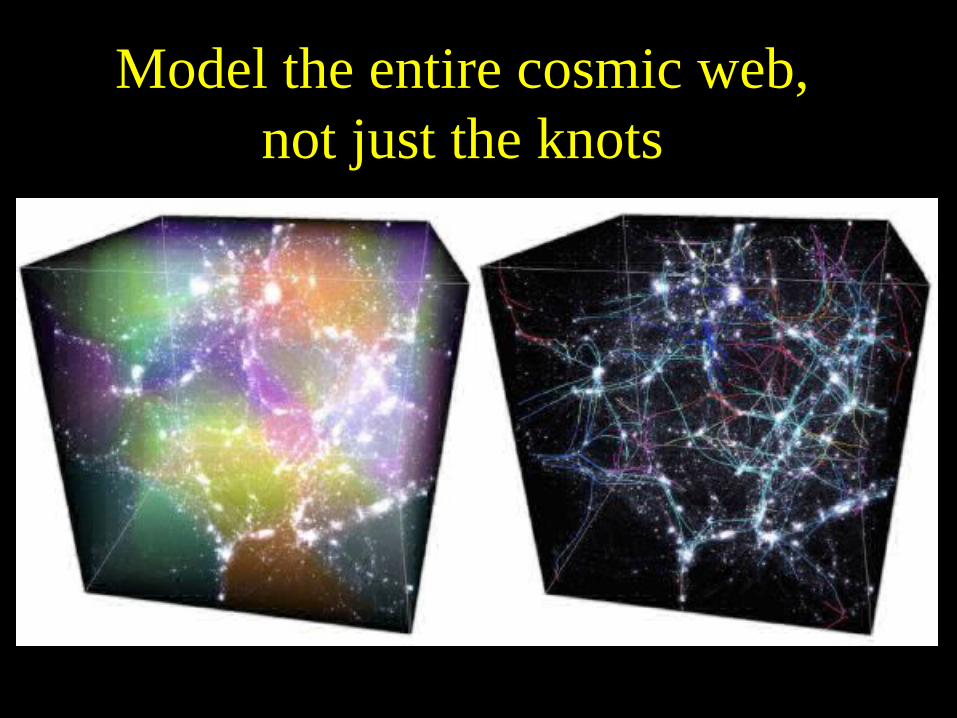
Model the entire cosmic web, not just the knots
Study of random walks with correlated steps
(i.e. path integral methods) =
Cosmological constraints from large scale structures
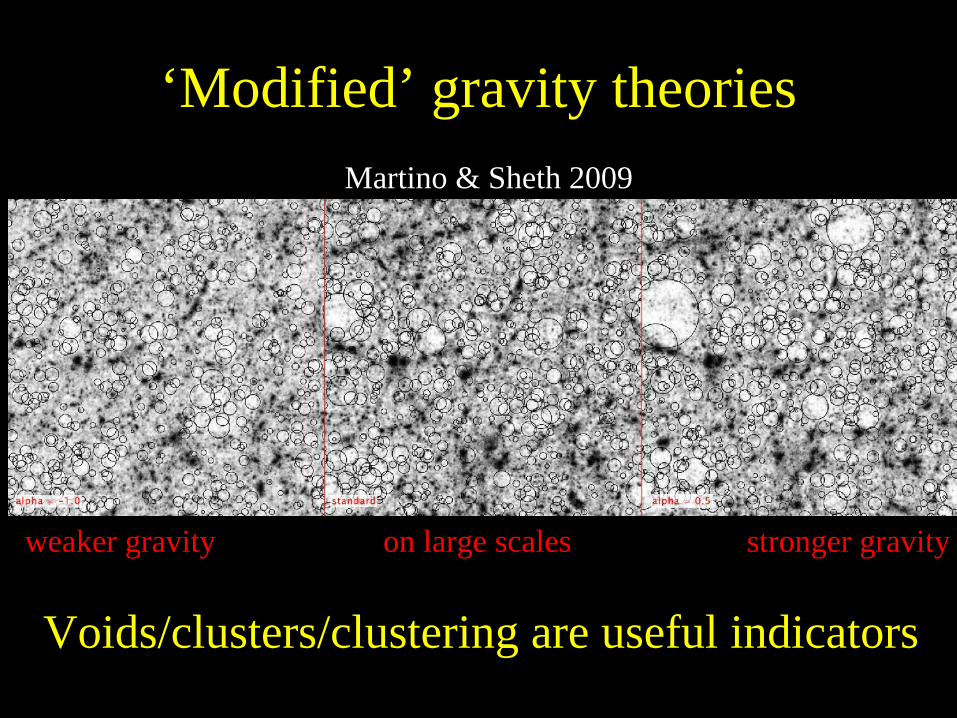
‘Modified’ gravity theories
Voids/clusters/clustering are useful indicators
weaker gravity on large scales stronger gravity
Martino & Sheth 2009
In many modifications to GR,scale-dependent linear theory is
generic:
δ(k,t) = D(k,t) δ(k,ti)
N.B. Peaks in ICs are not peaks in linearly evolved field
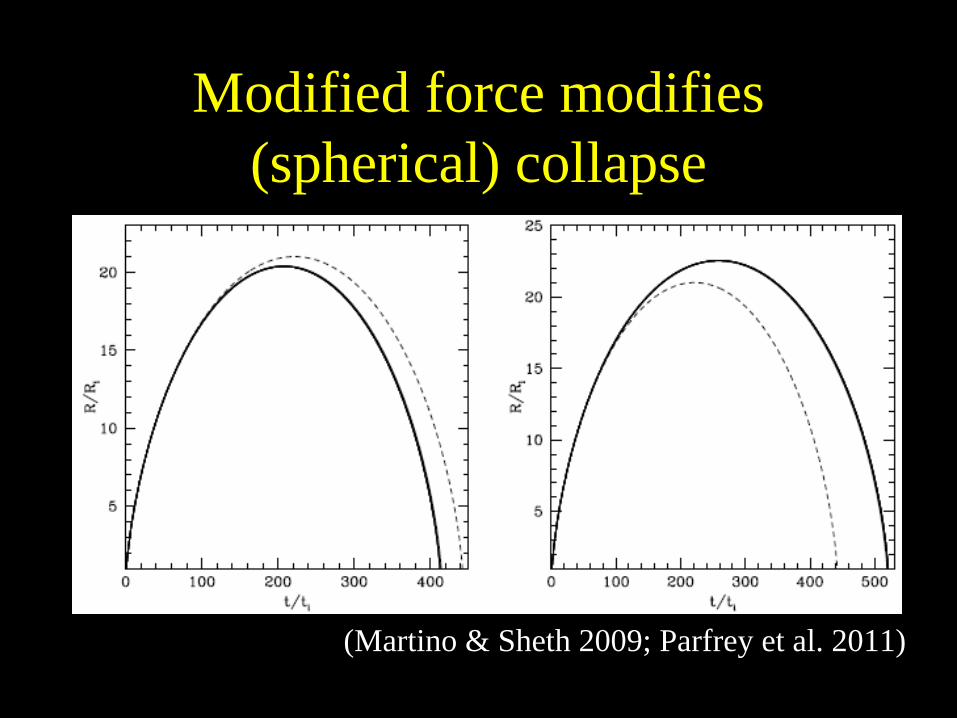
Modified force modifies (spherical) collapse
(Martino & Sheth 2009; Parfrey et al. 2011)
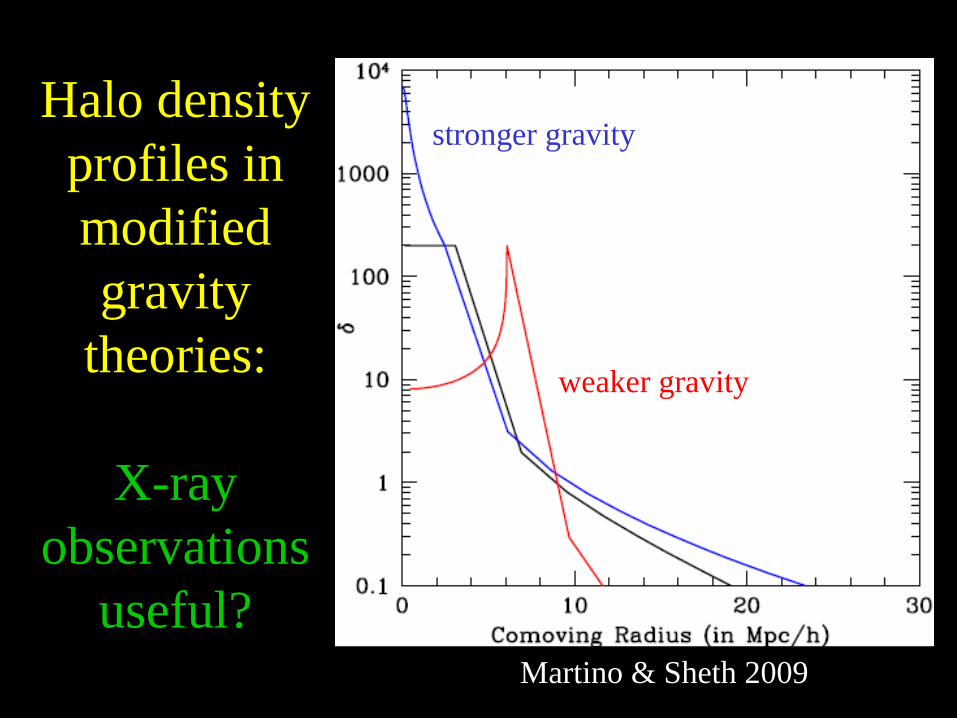
Halo density profiles in modified gravity
theories:
X-ray observations
useful?
stronger gravity
weaker gravity
Martino & Sheth 2009
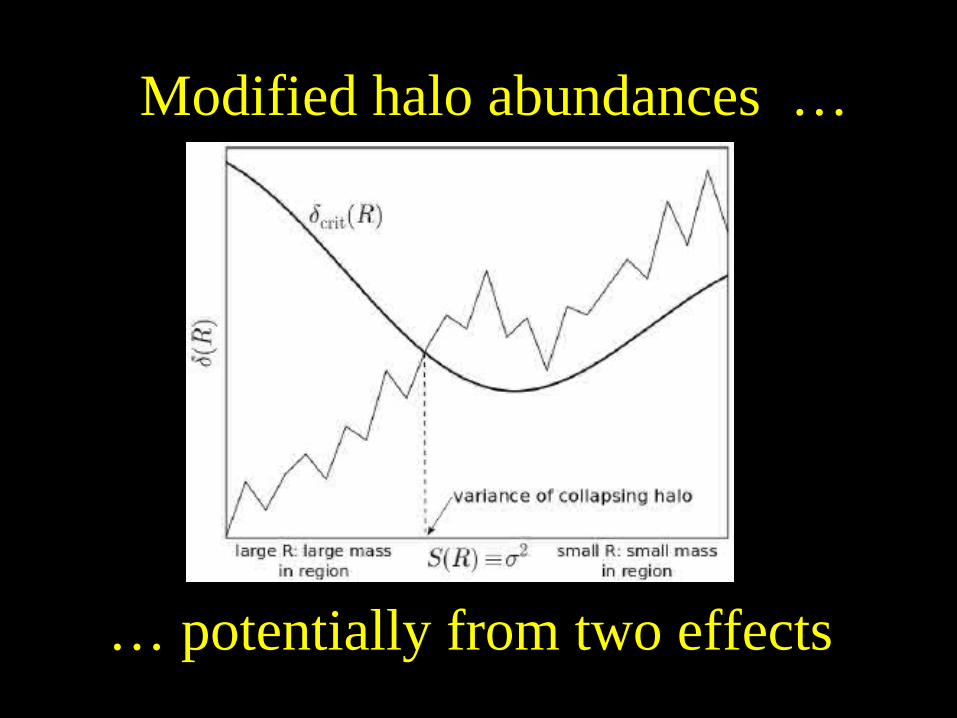
Modified halo abundances …
… potentially from two effects

δc(m) and σ(m)
• In standard GR, σ(m) is an integral over initial P(k), evolved using linear theory to later (collapse) time.
• In modified theories, D(k,t) means there is a difference between calculating in ICs vs linearly evolved field.
• Energy conservation arguments suggest better to work in ICs.

Critical overdensity required for
collapse at present becomes mass
dependent: δc(m)
This is generic.

Implication for halo bias
• Halos are linearly biased tracers of initial field
• D(k) means they are not linearly biased tracers of linearly-evolved field (Parfrey et al. 2011)
• Simulations in hand too small to test, but if real, this is an important systematic





























