Embed Size (px)
Citation preview
CENTURION UNIVERSITY OF TECHNOLOGY & MANAGEMENT
A L L U R I N A G A R , P A R A L A K H E M U N D I .
2014
PROCESS CONTROL AND
INSTRUMENTATION LAB MANUAL OF
EIE DEPARTMENT
BY K HARIKRISHNA
CENTURION UNIVERSITY OF TECHNOLOGY
AND MANAGEMENT
1
CENTURION UNIVERSITY OF TECHNOLOGY AND MANAGEMENT
SCHOOL OF ENGINEERING & TECHNOLOGY, Paralakhemundi
Process Control & Instrumentation Laboratory Record
Submitted By
Name: SISIR KUMAR MISHRA
Regd.No: 110101EIR001
Branch: EIE SEM: 6th
2013- 2014
2
CENTURION UNIVERSITY OF TECHNOLOGY AND
MANAGEMENT SCHOOL OF ENGINEERING & TECHNOLOGY, PARALAKHEMUNDI/JATNI
DEPARTMENT OF ELECTRONICS & INSTRUMENTATION
ENGINEERING
CERTIFICATE
This is to certify that
Mr/Ms: SISIR KUMAR MISHRA
With Registration No.110101EIR001
Of B.Tech 6th Semester has conducted 10 Experiments in
PROCESS CONTROL & INSTRUMENTATION Laboratory
Faculty in -Charge Head of the Department
Office Seal
3
CENTURION UNIVERSITY OF TECHNOLOGY AND MANAGEMENT
SCHOOL OF ENGINEERING& TECHNOLOGY, Paralakhemundi/Jatni
DEPARTMENT OF Electronics and Instrumentation Engineering
EVALUATION SHEET
Name of the Laboratory: Process Control & Instrumentation
Name of the Student: Sisir Kumar Mishra Regd .No: 110101EIR001
Semester: 6TH Max .Marks: 100
Sl.No Exp.No Date
Attendance
(1M)
Lab Work
(4M)
Report
(2M)
Viva
(3M)
Total
(10M)
1 1
2 2
3 3
4 4
5 5
6 6
7 7
8 8
9 9
10 10
Grade : Total Marks
Signature of the Faculty- in Charge
4
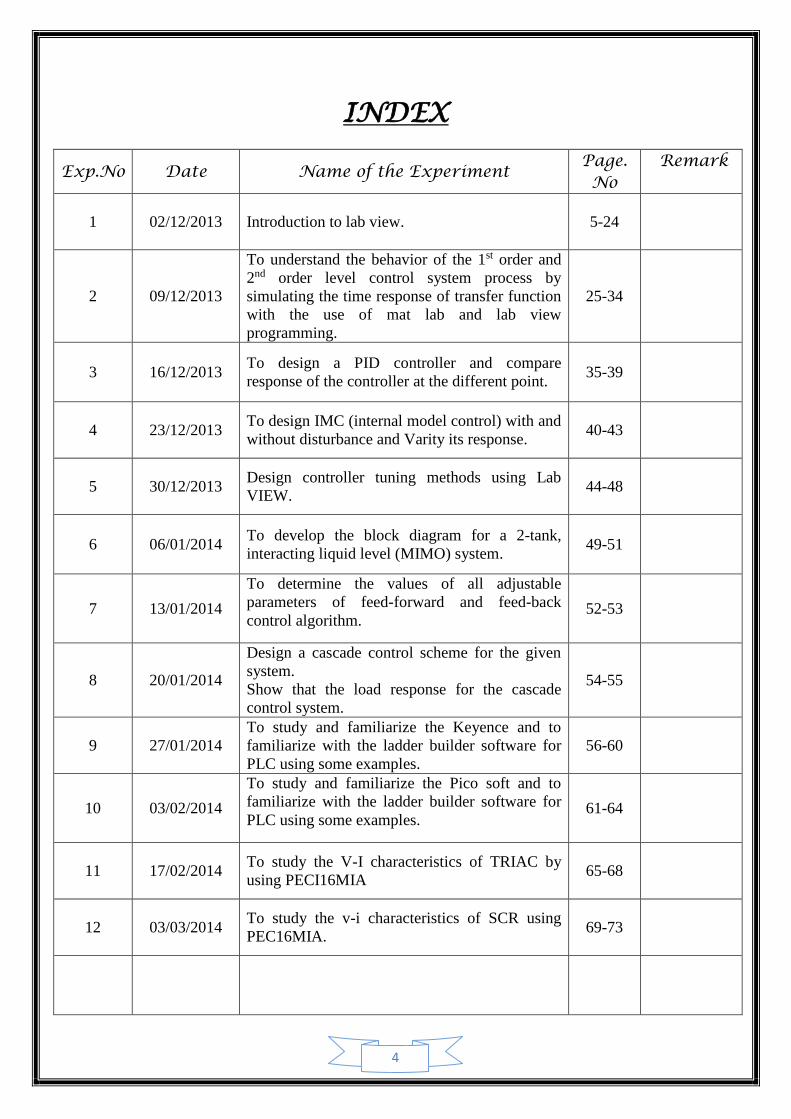
INDEX
Exp.No Date Name of the Experiment Page. No
Remark
1 02/12/2013 Introduction to lab view. 5-24
2 09/12/2013
To understand the behavior of the 1st order and
2nd order level control system process by
simulating the time response of transfer function
with the use of mat lab and lab view
programming.
25-34
3 16/12/2013 To design a PID controller and compare
response of the controller at the different point. 35-39
4 23/12/2013 To design IMC (internal model control) with and
without disturbance and Varity its response. 40-43
5 30/12/2013 Design controller tuning methods using Lab
VIEW. 44-48
6 06/01/2014 To develop the block diagram for a 2-tank,
interacting liquid level (MIMO) system. 49-51
7 13/01/2014
To determine the values of all adjustable
parameters of feed-forward and feed-back
control algorithm. 52-53
8 20/01/2014
Design a cascade control scheme for the given
system.
Show that the load response for the cascade
control system.
54-55
9 27/01/2014
To study and familiarize the Keyence and to
familiarize with the ladder builder software for
PLC using some examples.
56-60
10 03/02/2014
To study and familiarize the Pico soft and to
familiarize with the ladder builder software for
PLC using some examples. 61-64
11 17/02/2014 To study the V-I characteristics of TRIAC by
using PECI16MIA 65-68
12 03/03/2014 To study the v-i characteristics of SCR using
PEC16MIA. 69-73
5
EXPERIMENT-1
AIM OF THE EXPERIMENT:-
Introduction to lab view
SOFTWARE REQUIRED:-
Lab view 2010
THEORY:-
Introduction Lab VIEW:
Lab VIEW is a development system for industrial, experimental, and educational
measurement and automation applications based on graphical programming, in contrast to
textual programming - however, textual programming is supported in Lab VIEW.
Lab VIEW has a large number of functions for numerical analysis and design and
visualization of data.
Lab VIEW now has several toolkits and modules which brings the Lab VIEW to the same
level of functionality as Matlab and Simulink in analysis and design in the areas of control,
signal processing, system identification, mathematics, and simulation, and more.
In addition, Lab VIEW has, of course, inbuilt support for the broad range of measurement
and automation hardware produced by National Instruments. Communication with third party
hardware is also possible thanks to the availability of a large number of drivers and the
support for communication standards as OPC, Modbus, GPIB, etc.
Lab VIEW is produced by National Instruments.
Lab VIEW (short for Laboratory Virtual Instrumentation Engineering Workbench) is a
platform and development environment for a visual programming language from National
Instruments. The purpose of such programming is automating the usage of processing and
measuring equipment in any laboratory setup.
The graphical language is named "G" (not to be confused with G-code). Originally released
for the Apple Macintosh in 1986, Lab VIEW is commonly used for data acquisition,
instrument control, and industrial automation on a variety of platforms including Microsoft
Windows, various versions of UNIX, Linux, and Mac OS X.
The programming language used in Lab VIEW, also referred to as G, is a dataflow
programming language.
Execution is determined by the structure of a graphical block diagram (the LV-source code)
on which the programmer connects different function-nodes by drawing wires.
These wires propagate variables and any node can execute as soon as all its input data
become available. Since this might be the case for multiple nodes simultaneously, G is
inherently capable of parallel execution. Multi-processing and multi-threading hardware is

6
automatically exploited by the built-in scheduler, which multiplexes multiple OS threads over
the nodes ready for execution.
Lab VIEW ties the creation of user interfaces (called front panels) into the development
cycle. Lab VIEW programs/subroutines are called virtual instruments (VIs).
Each VI has three components: a block diagram, a front panel and a connector panel.
The last is used to represent the VI in the block diagrams of other, calling VIs. Controls and
indicators on the front panel allow an operator to input data into or extract data from a
running virtual instrument.
However, the front panel can also serve as a programmatic interface.
Thus a virtual instrument can either be run as a program, with the front panel serving as a
user interface, or, when dropped as a node onto the block diagram, the front panel defines the
inputs and outputs for the given node through the connector pane.
The graphical approach also allows non-programmers to build programs by dragging and
dropping virtual representations of lab equipment with which they are already familiar. The
Lab VIEW programming environment, with the included examples and documentation,
makes it simple to create small applications. This is a benefit on one side, but there is also a
certain danger of underestimating the expertise needed for high-quality G programming
. For complex algorithms or large-scale code, it is important that the programmer possesses
an extensive knowledge of the special Lab VIEW syntax and the topology of its memory
management. The most advanced Lab VIEW development systems offer the possibility of
building stand-alone applications. Furthermore, it is possible to create distributed
applications, which communicate by a client/server scheme, and are therefore easier to
implement due to the inherently parallel nature of G.
Command lab view short cut:
File:
Clrtl+N = create new VI
Clrtl+O = open file
Clrtl+W = close file
Clrtl+S = save VI
Clrtl+I = display VI properties
Clrtl+Q = quit Lab VIEW
Edit:
Clrtl+V = paste object
Clrtl+Shift+F = display search results
Clrtl+U = clean up diagram
Clrtl+space = activate quick drop
Clrtl+B = remove broken wires 3
Clrtl+X = cut object
Clrtl+Z = undo last action
Clrtl+Shift+z = redo last action
7
Operate:
Clrtl+R = run VI
Clrtl+M = change run /edit node
Clrtl = atomic VI
Window:
Clrtl+E = display block diagram / front panel
Right click =display controls/functions palette
Shift = display tool palette
Clrtl+L = display error list
Clrtl+T = title block diagram and front panel windows
Clrtl+l = adjust window to full size
Help:
Clrtl+H = display window to full size
Clrtl+? = display help contents & index
Clrtl+Shift +L = lock context help
National instruments of lab view is an industry leading software tool for designing test,
National Instruments Lab VIEW is an industry-leading software tool for designing test,
measurement, and control systems.
Since its introduction in 1986, engineers and scientists worldwide who have relied on NI Lab
VIEW graphical development for projects throughout the product design cycle have gained
improved quality, shorter time to market, and greater engineering and manufacturing
efficiency.
By using the integrated Lab VIEW environment to interface with real-world signals, analyze
data for meaningful information, and share results, you can boost productivity throughout
your organization.
Because Lab VIEW has the flexibility of a programming language combined with built-in
tools designed specifically for test, measurement, and control, you can create applications
that range from simple temperature monitoring to sophisticated simulation and control
systems.
No matter what your project is, Lab VIEW has the necessary tools to make you successful
quickly.
.
This course prepares you to do the following:
• Use LabVIEW to create applications.
8
• Understand front panels, block diagrams, and icons and connector panes.
• Use built-in LabVIEW functions.
• Create and save programs in LabVIEW so you can use them as subroutines.
• Create applications that use plug-in DAQ devices.
This course does not describe any of the following:
• Programming theory
• Every built-in LabVIEW function or object
• Analog-to-digital (A/D) theory
NI does provide free reference materials on the above topics on ni.com.
Virtual Instrumentation:-
For more than 30 years, National Instruments has revolutionized the way engineers and
scientists in industry, government, and academia approach measurement and automation.
Leveraging PCs and commercial technologies, virtual instrumentation increases productivity
and lowers costs for test, control, and design applications through easy-to-integrate software,
such as NI Lab VIEW, and modular measurement and control hardware for PXI, PCI, USB,
and Ethernet.
With virtual instrumentation, engineers use graphical programming software to create user-
defined solutions that meet their specific needs, which is a great alternative to proprietary,
fixed-functionality traditional instruments.
Additionally, virtual instrumentation capitalizes on the ever-increasing performance of
personal computers.
For example, in test, measurement, and control, engineers have used virtual instrumentation
to downsize automated test equipment (ATE) while experiencing up to a 10 times increase in
productivity gains at a fraction of the cost of traditional instrument solutions.
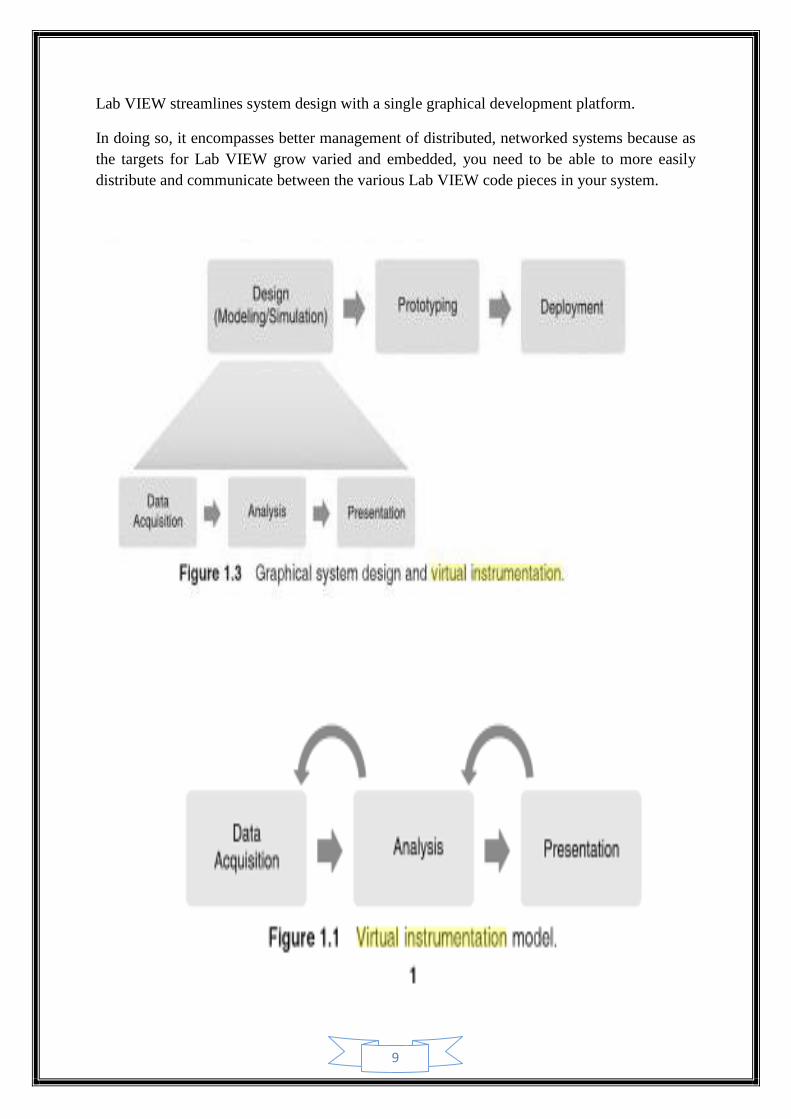
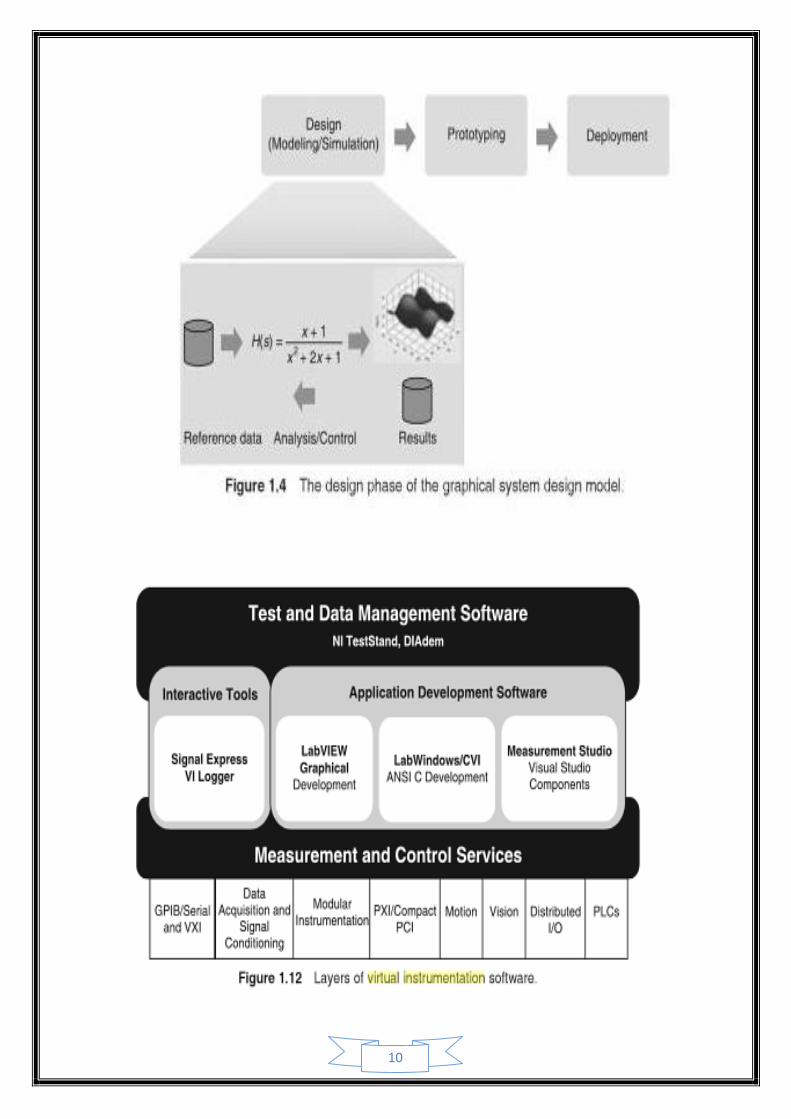
Virtual Instrumentation Applications:-
Virtual instrumentation is effective in many different types of applications, from design to
prototyping to deployment.
The Lab VIEW platform provides specific tools and models to meet specific application
challenges, ranging from designing signal processing algorithms to making voltage
measurements, and can target any number of platforms from the desktop to embedded
devices – with an intuitive, powerful graphical paradigm. Lab VIEW scales from design and
development on PCs to several embedded targets, from rugged toaster-size prototypes to
embedded systems on chips.
9
Lab VIEW streamlines system design with a single graphical development platform.
In doing so, it encompasses better management of distributed, networked systems because as
the targets for Lab VIEW grow varied and embedded, you need to be able to more easily
distribute and communicate between the various Lab VIEW code pieces in your system.
10
11
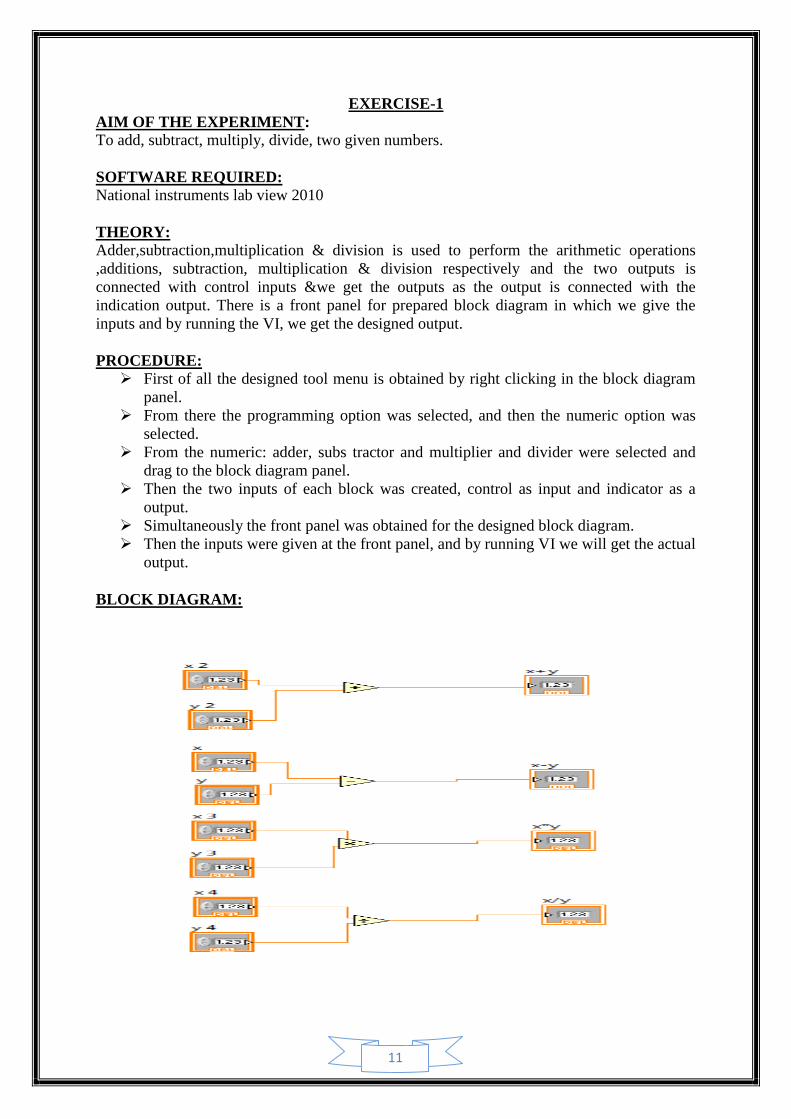
EXERCISE-1
AIM OF THE EXPERIMENT: To add, subtract, multiply, divide, two given numbers.
SOFTWARE REQUIRED: National instruments lab view 2010
THEORY:
Adder,subtraction,multiplication & division is used to perform the arithmetic operations
,additions, subtraction, multiplication & division respectively and the two outputs is
connected with control inputs &we get the outputs as the output is connected with the
indication output. There is a front panel for prepared block diagram in which we give the
inputs and by running the VI, we get the designed output.
PROCEDURE: First of all the designed tool menu is obtained by right clicking in the block diagram
panel.
From there the programming option was selected, and then the numeric option was
selected.
From the numeric: adder, subs tractor and multiplier and divider were selected and
drag to the block diagram panel.
Then the two inputs of each block was created, control as input and indicator as a
output.
Simultaneously the front panel was obtained for the designed block diagram.
Then the inputs were given at the front panel, and by running VI we will get the actual
output.
BLOCK DIAGRAM:
12
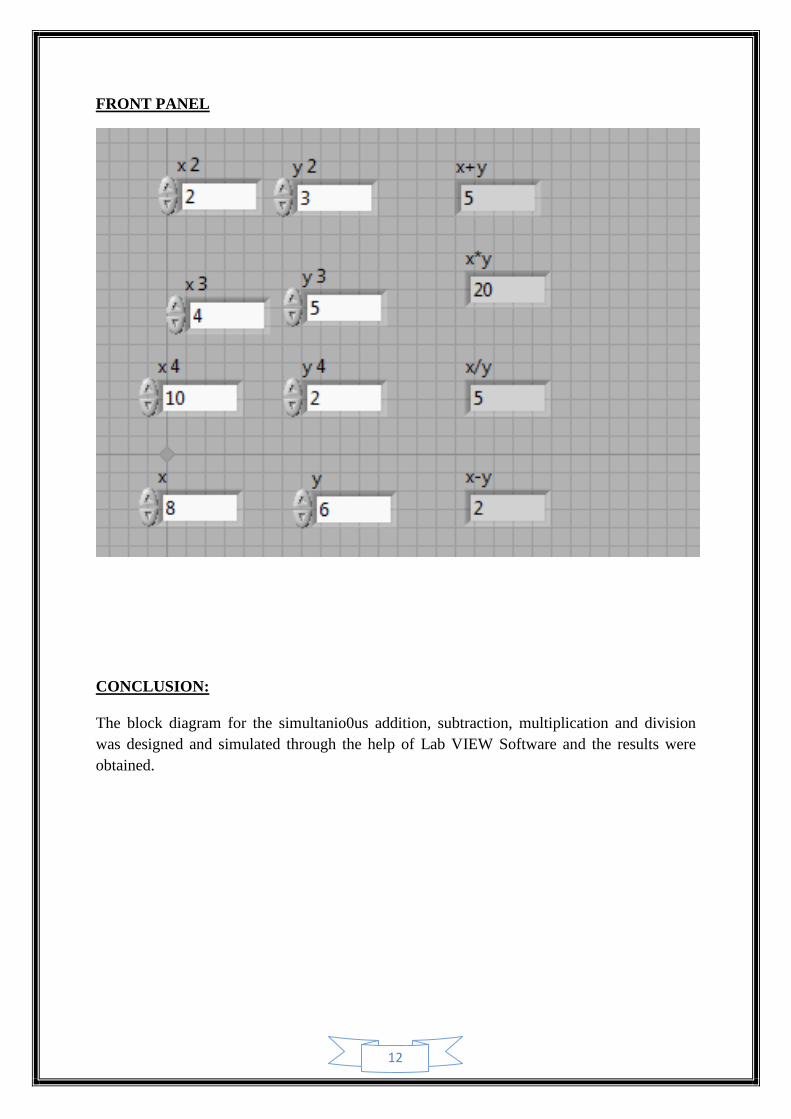
FRONT PANEL
CONCLUSION:
The block diagram for the simultanio0us addition, subtraction, multiplication and division
was designed and simulated through the help of Lab VIEW Software and the results were
obtained.
13
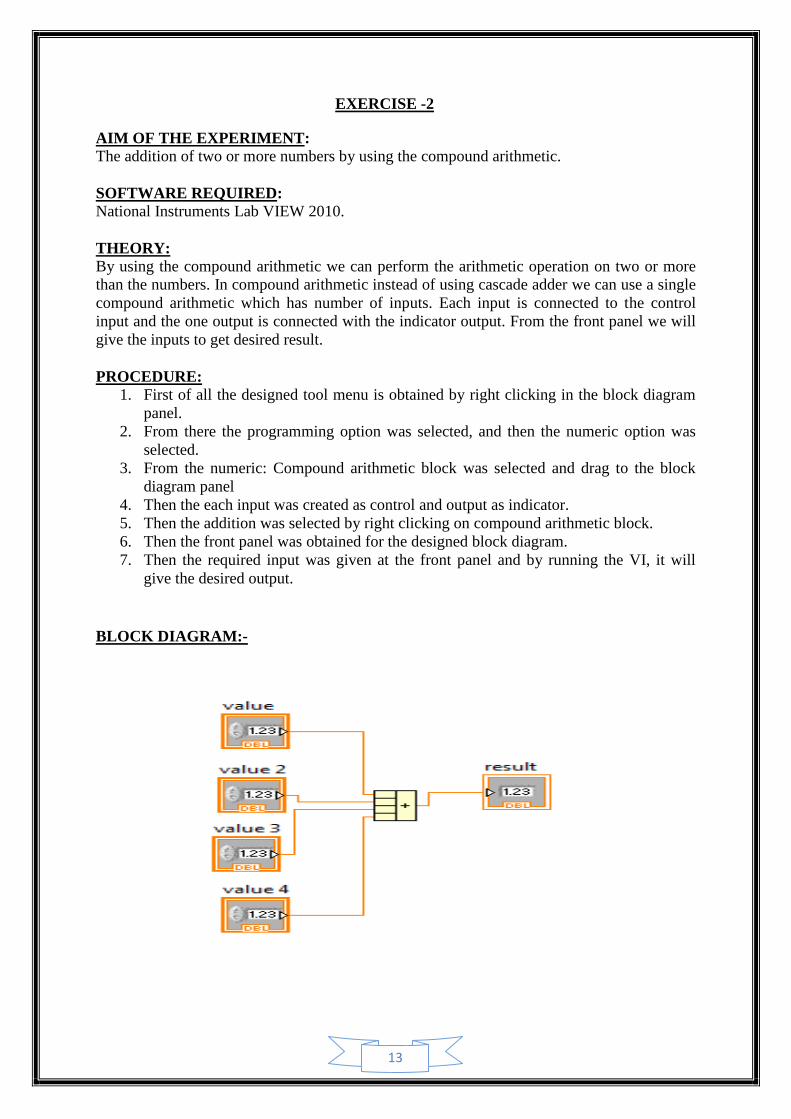
EXERCISE -2
AIM OF THE EXPERIMENT: The addition of two or more numbers by using the compound arithmetic.
SOFTWARE REQUIRED: National Instruments Lab VIEW 2010.
THEORY: By using the compound arithmetic we can perform the arithmetic operation on two or more
than the numbers. In compound arithmetic instead of using cascade adder we can use a single
compound arithmetic which has number of inputs. Each input is connected to the control
input and the one output is connected with the indicator output. From the front panel we will
give the inputs to get desired result.
PROCEDURE:
1. First of all the designed tool menu is obtained by right clicking in the block diagram
panel.
2. From there the programming option was selected, and then the numeric option was
selected.
3. From the numeric: Compound arithmetic block was selected and drag to the block
diagram panel
4. Then the each input was created as control and output as indicator.
5. Then the addition was selected by right clicking on compound arithmetic block.
6. Then the front panel was obtained for the designed block diagram.
7. Then the required input was given at the front panel and by running the VI, it will
give the desired output.
BLOCK DIAGRAM:-
14
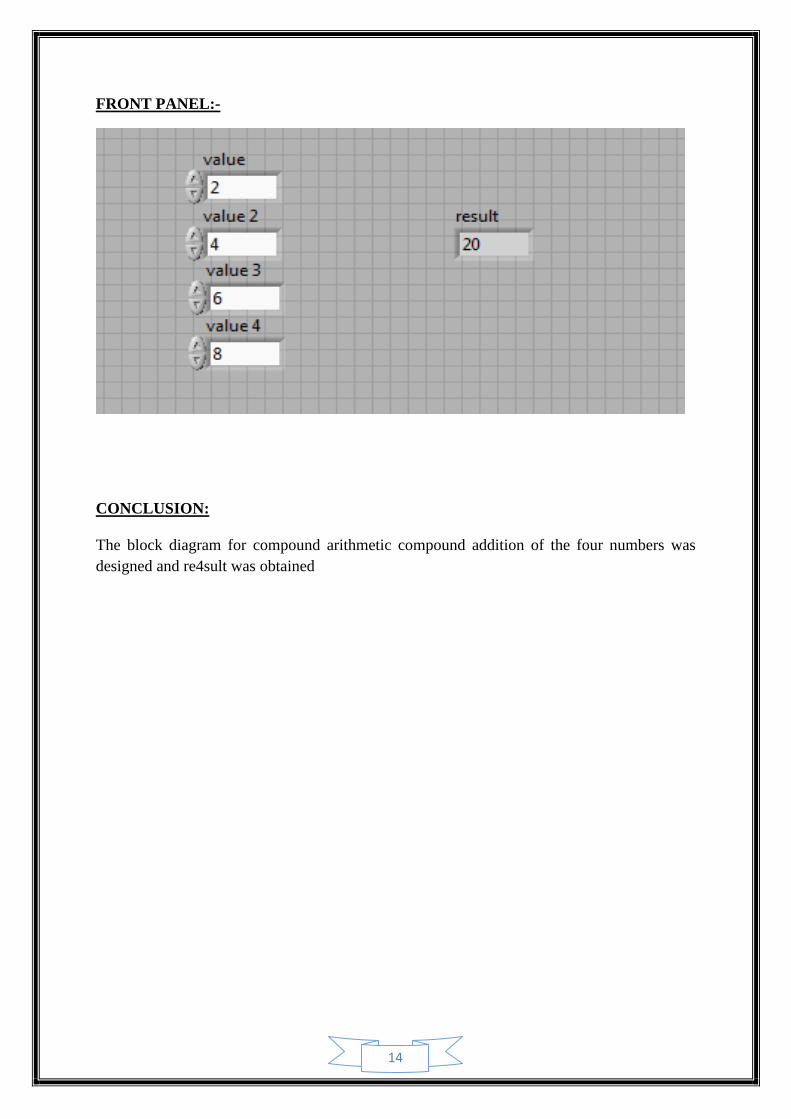
FRONT PANEL:-
CONCLUSION:
The block diagram for compound arithmetic compound addition of the four numbers was
designed and re4sult was obtained
15
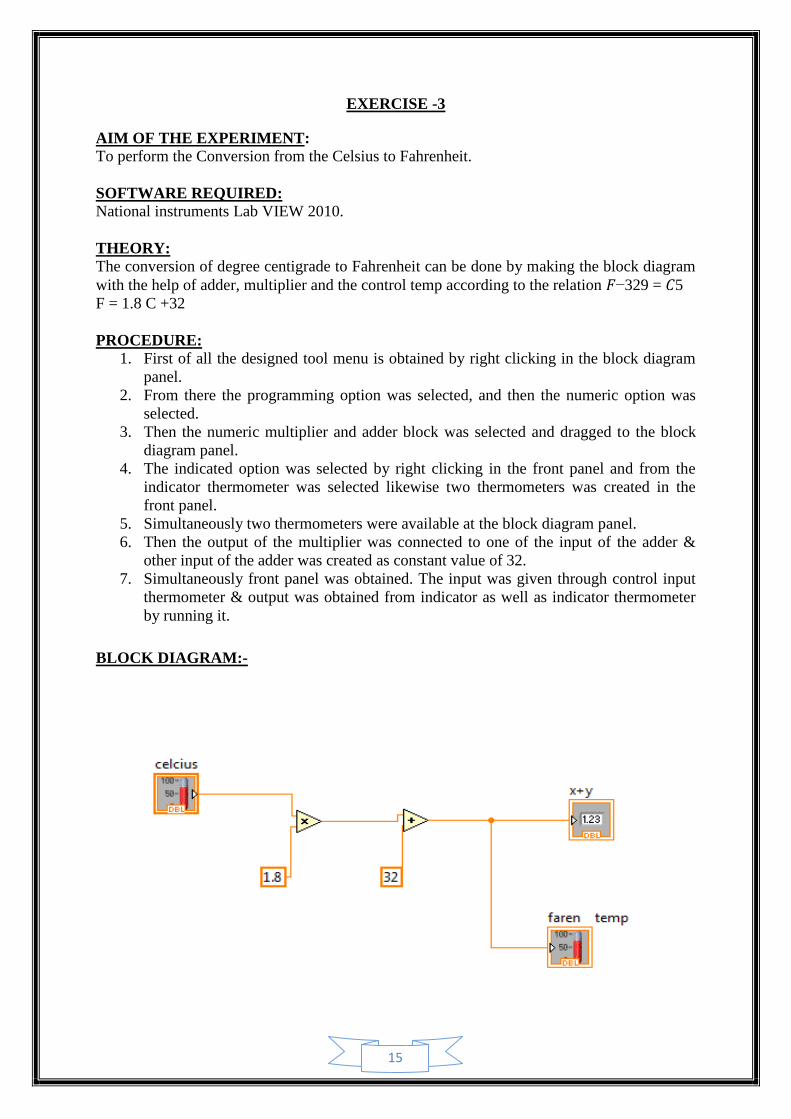
EXERCISE -3
AIM OF THE EXPERIMENT:
To perform the Conversion from the Celsius to Fahrenheit.
SOFTWARE REQUIRED: National instruments Lab VIEW 2010.
THEORY:
The conversion of degree centigrade to Fahrenheit can be done by making the block diagram
with the help of adder, multiplier and the control temp according to the relation 𝐹−329 = 𝐶5
F = 1.8 C +32
PROCEDURE: 1. First of all the designed tool menu is obtained by right clicking in the block diagram
panel.
2. From there the programming option was selected, and then the numeric option was
selected.
3. Then the numeric multiplier and adder block was selected and dragged to the block
diagram panel.
4. The indicated option was selected by right clicking in the front panel and from the
indicator thermometer was selected likewise two thermometers was created in the
front panel.
5. Simultaneously two thermometers were available at the block diagram panel.
6. Then the output of the multiplier was connected to one of the input of the adder &
other input of the adder was created as constant value of 32.
7. Simultaneously front panel was obtained. The input was given through control input
thermometer & output was obtained from indicator as well as indicator thermometer
by running it.
BLOCK DIAGRAM:-
16
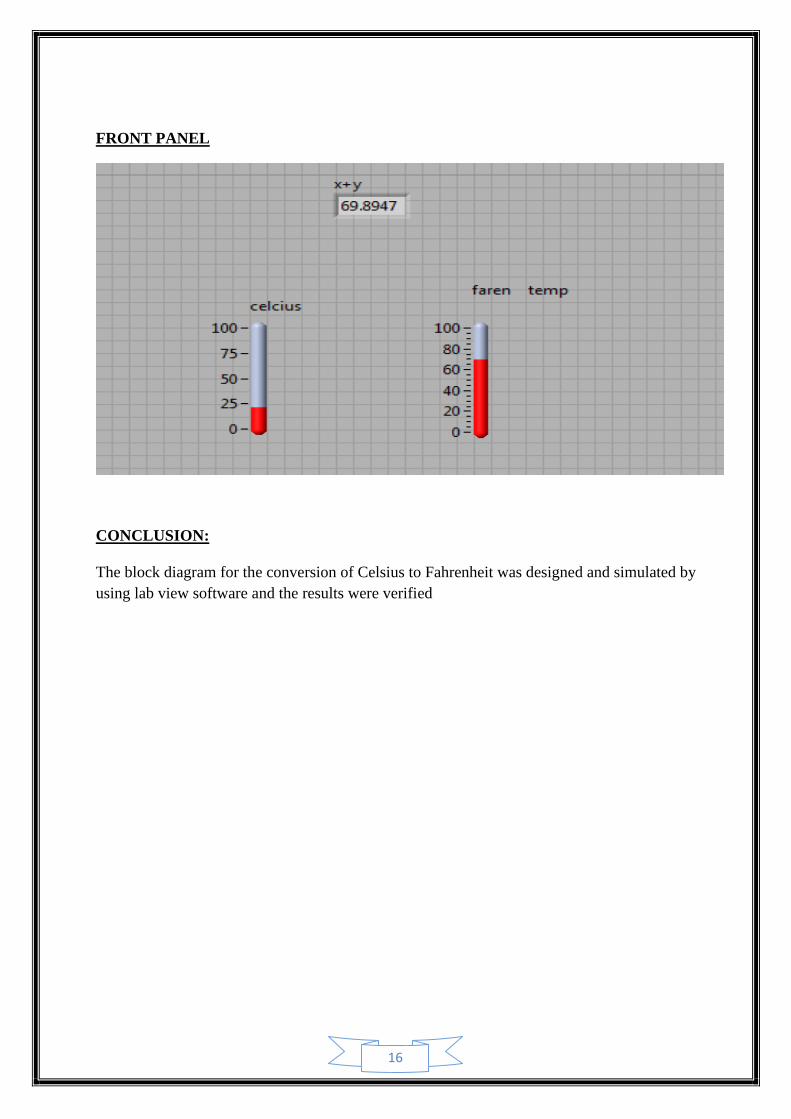
FRONT PANEL
CONCLUSION:
The block diagram for the conversion of Celsius to Fahrenheit was designed and simulated by
using lab view software and the results were verified
17
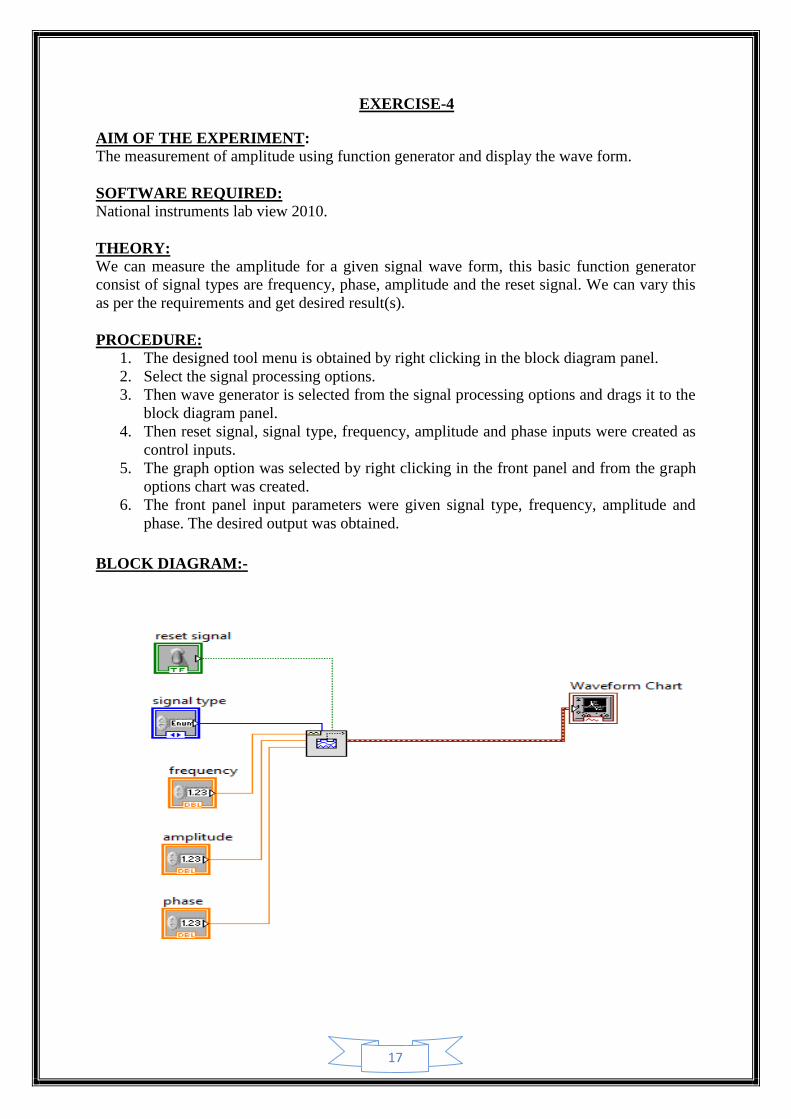
EXERCISE-4
AIM OF THE EXPERIMENT: The measurement of amplitude using function generator and display the wave form.
SOFTWARE REQUIRED: National instruments lab view 2010.
THEORY: We can measure the amplitude for a given signal wave form, this basic function generator
consist of signal types are frequency, phase, amplitude and the reset signal. We can vary this
as per the requirements and get desired result(s).
PROCEDURE: 1. The designed tool menu is obtained by right clicking in the block diagram panel.
2. Select the signal processing options.
3. Then wave generator is selected from the signal processing options and drags it to the
block diagram panel.
4. Then reset signal, signal type, frequency, amplitude and phase inputs were created as
control inputs.
5. The graph option was selected by right clicking in the front panel and from the graph
options chart was created.
6. The front panel input parameters were given signal type, frequency, amplitude and
phase. The desired output was obtained.
BLOCK DIAGRAM:-
18
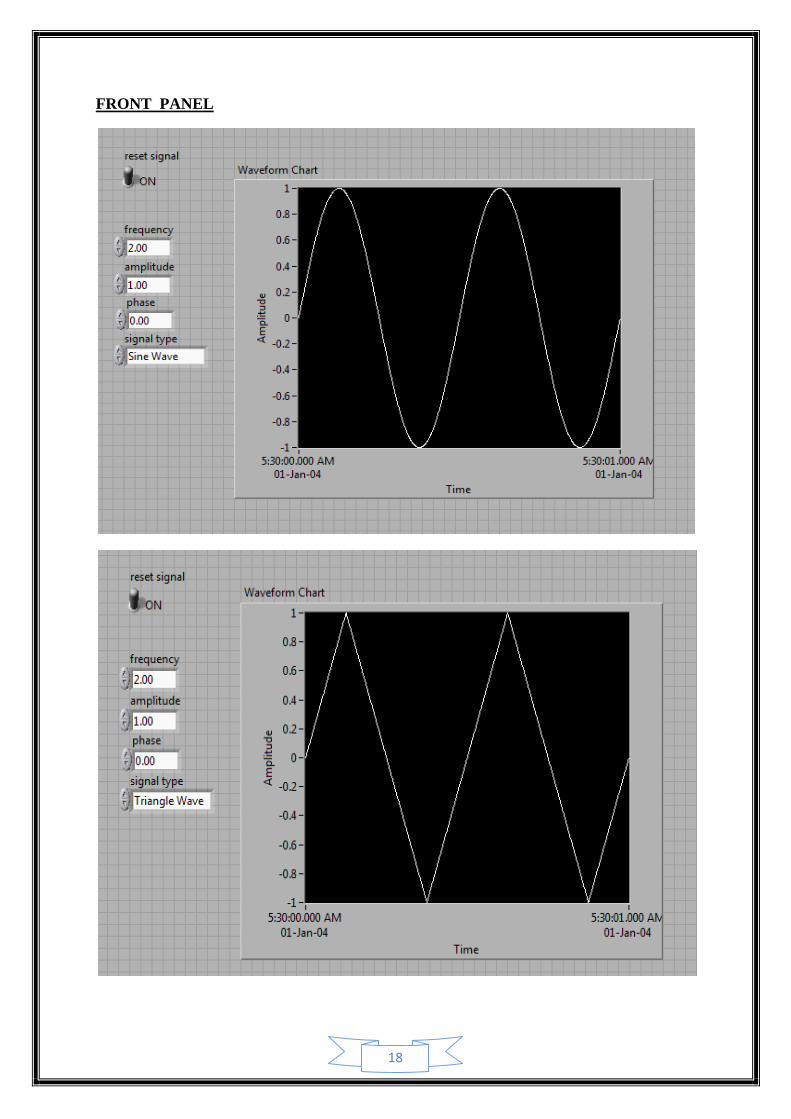
FRONT PANEL
19
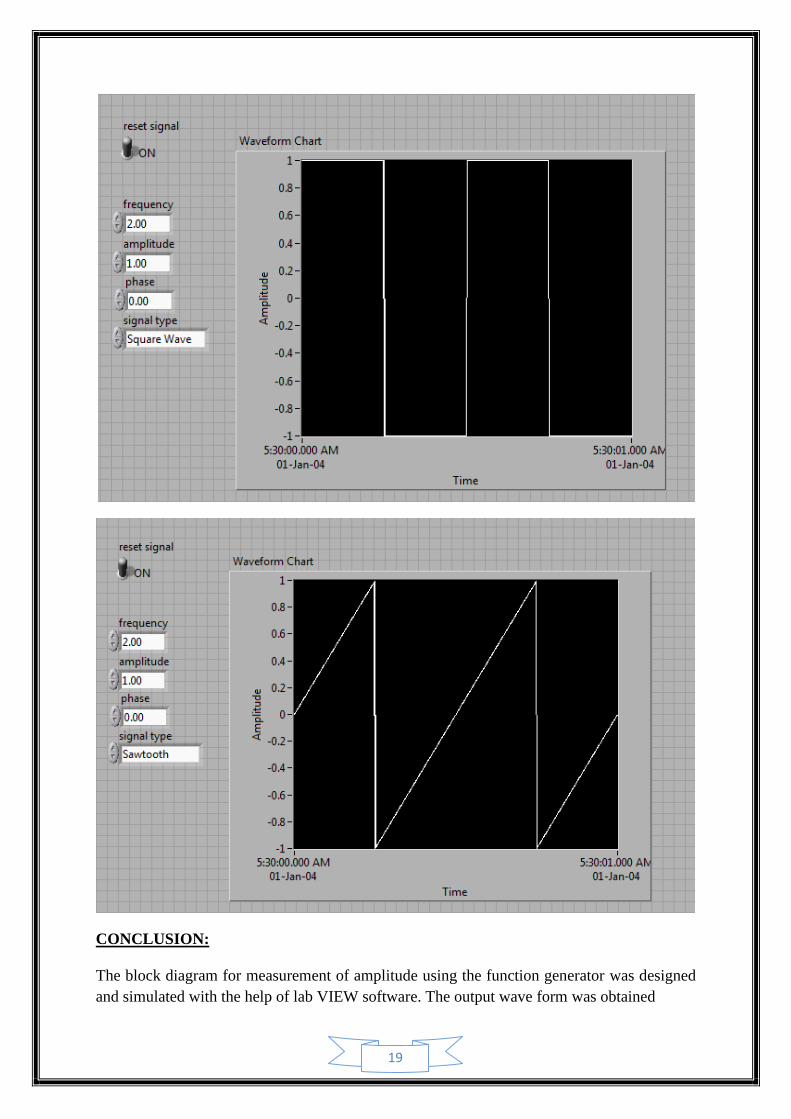
CONCLUSION:
The block diagram for measurement of amplitude using the function generator was designed
and simulated with the help of lab VIEW software. The output wave form was obtained
20
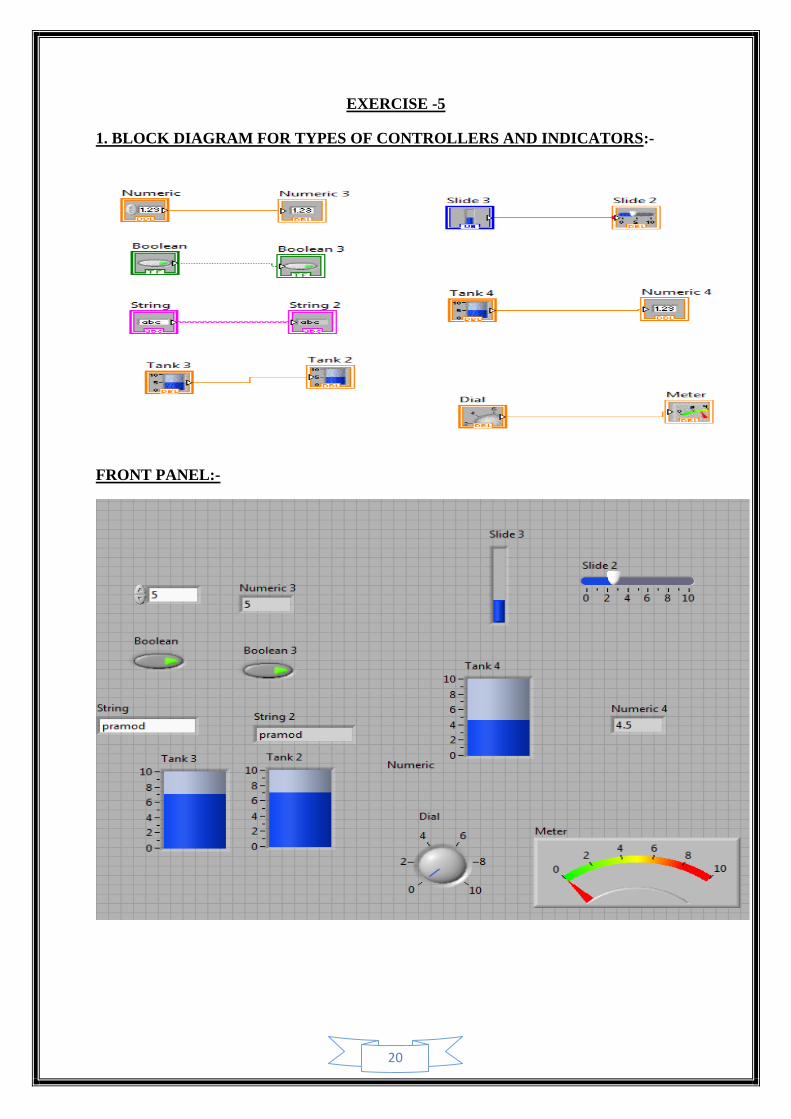
EXERCISE -5
1. BLOCK DIAGRAM FOR TYPES OF CONTROLLERS AND INDICATORS:-
FRONT PANEL:-
21
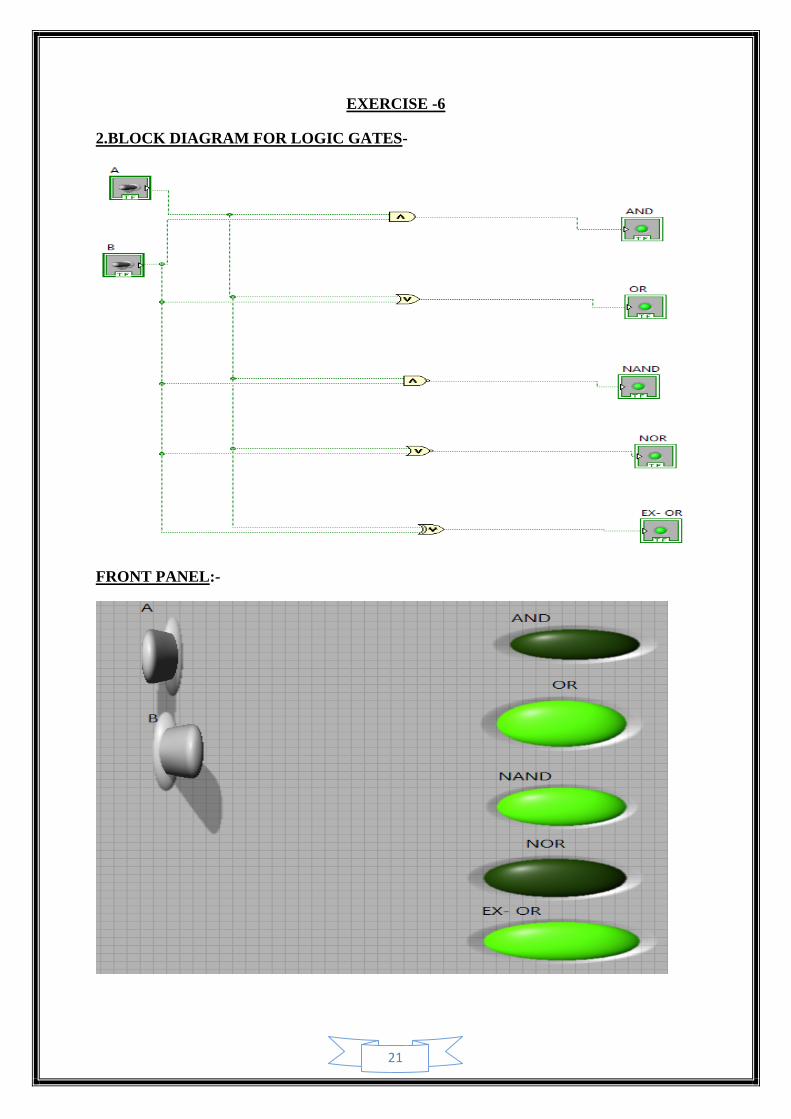
EXERCISE -6
2.BLOCK DIAGRAM FOR LOGIC GATES-
FRONT PANEL:-
22
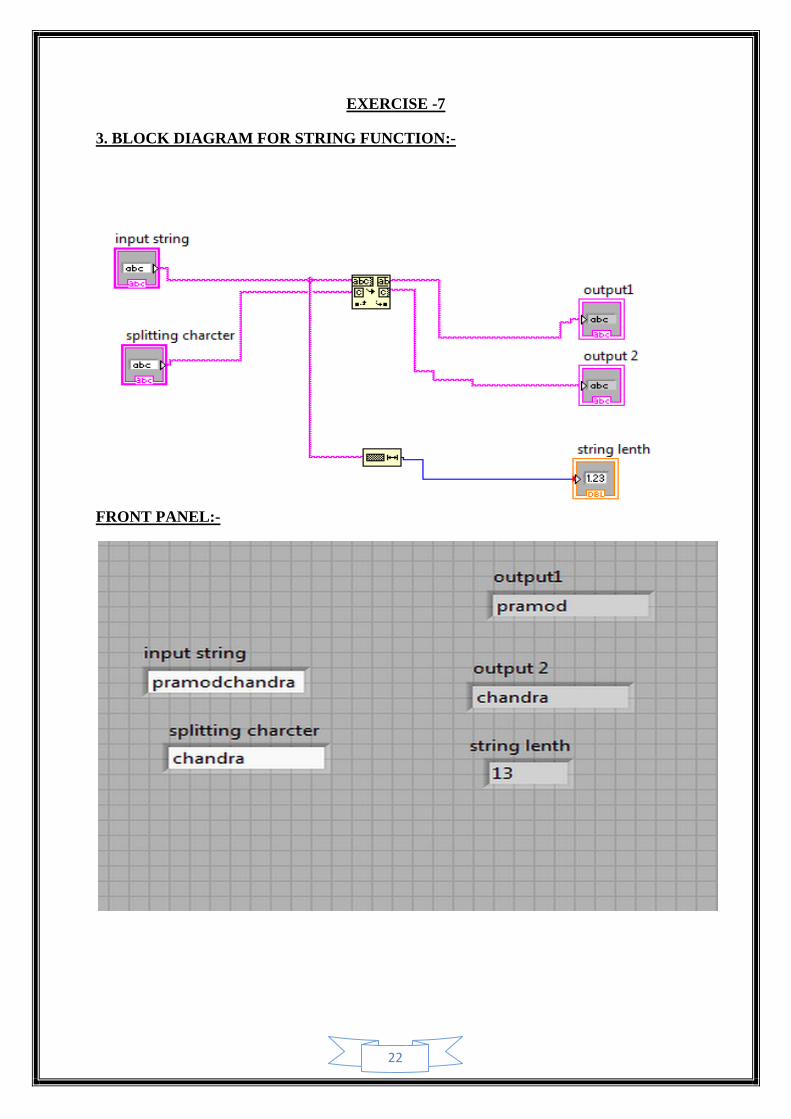
EXERCISE -7
3. BLOCK DIAGRAM FOR STRING FUNCTION:-
FRONT PANEL:-
23
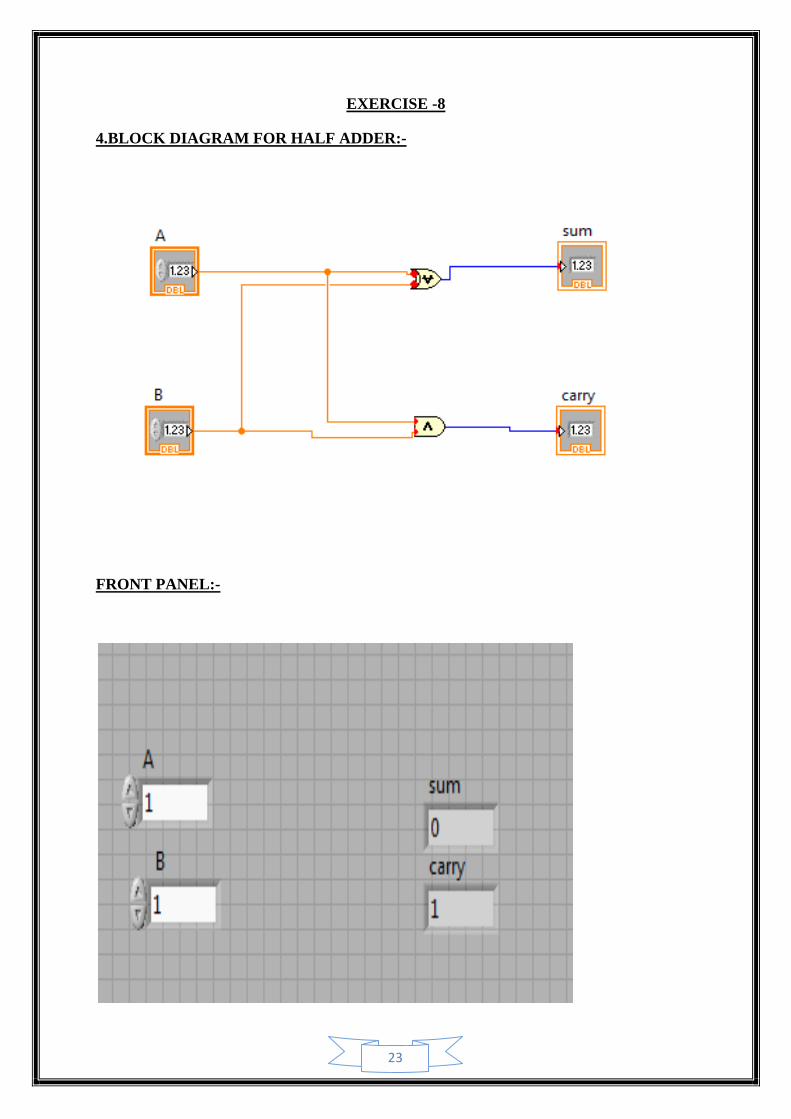
EXERCISE -8
4.BLOCK DIAGRAM FOR HALF ADDER:-
FRONT PANEL:-
24
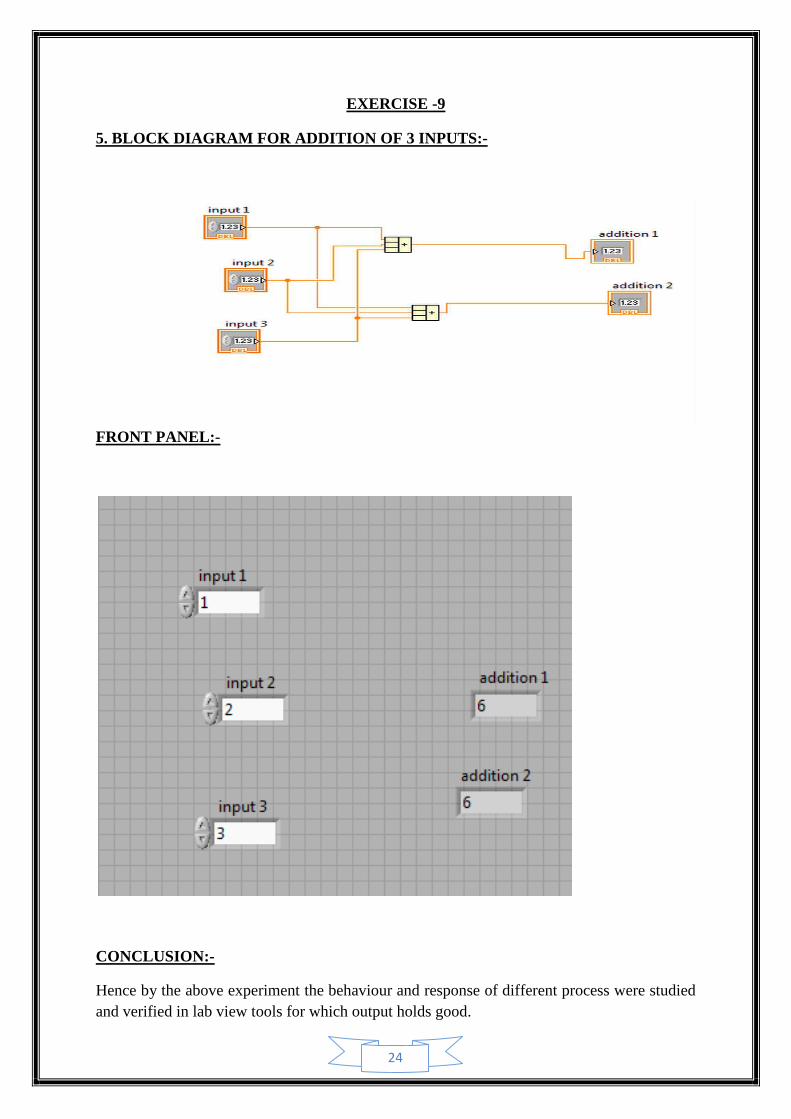
EXERCISE -9
5. BLOCK DIAGRAM FOR ADDITION OF 3 INPUTS:-
FRONT PANEL:-
CONCLUSION:-
Hence by the above experiment the behaviour and response of different process were studied
and verified in lab view tools for which output holds good.
25
EXPERIMENT-2
AIM OF THE EXPERIMENT
To understand the behaviour of the 1st order and 2nd order level control system process by
simulating the time response of transfer function with the use of mat lab and lab view
programming.
SOFTWARE REQUIRED
1. Mat lab R2010a
2. Lab view 2009
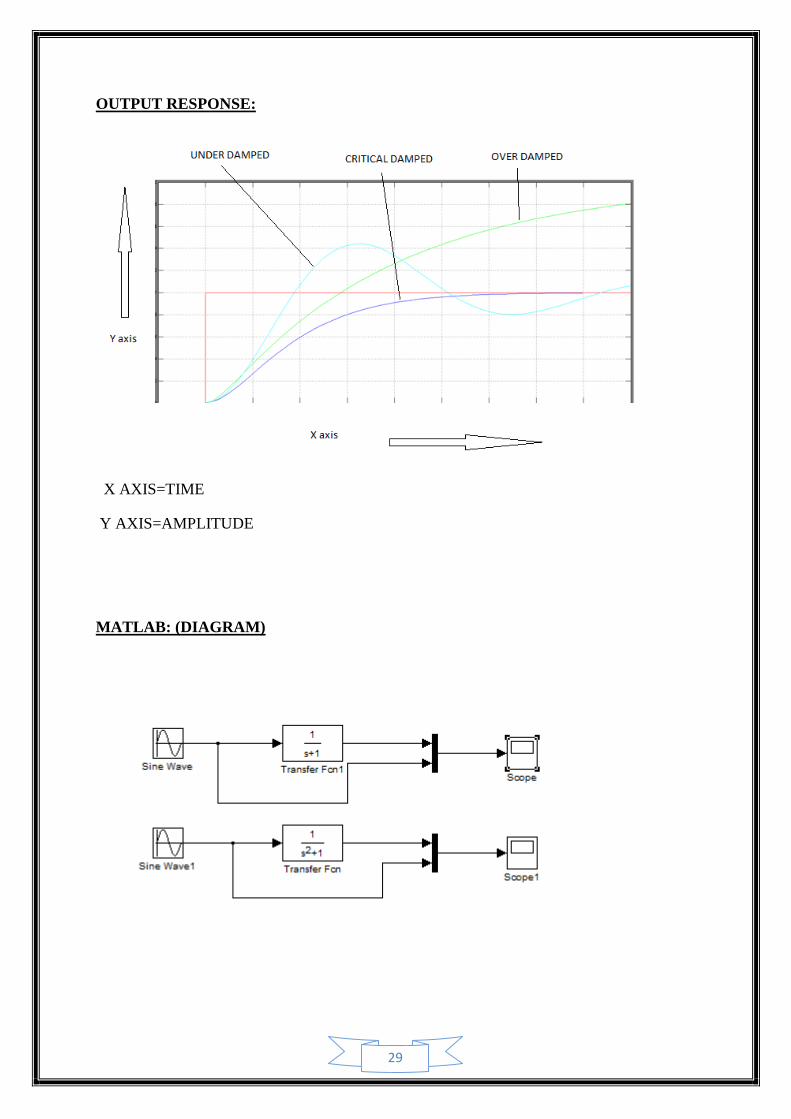
THEORY
Every practical system takes finite time to reach its steady state and during this period, it
oscillates or increases exponentially .every system has a tendency to oppose oscillatory
behaviour of the system which is called damping. This damping is measured by a factor or a
ratio called damping ratio of the system. A standard second order system takes the transfer
function.
𝐶(𝑠)
𝑅(𝑠) =
𝜔𝑛²
𝑠2+2𝜉𝜔𝑛𝑠+𝜔𝑛²
For 1˂ ξ ˂∞
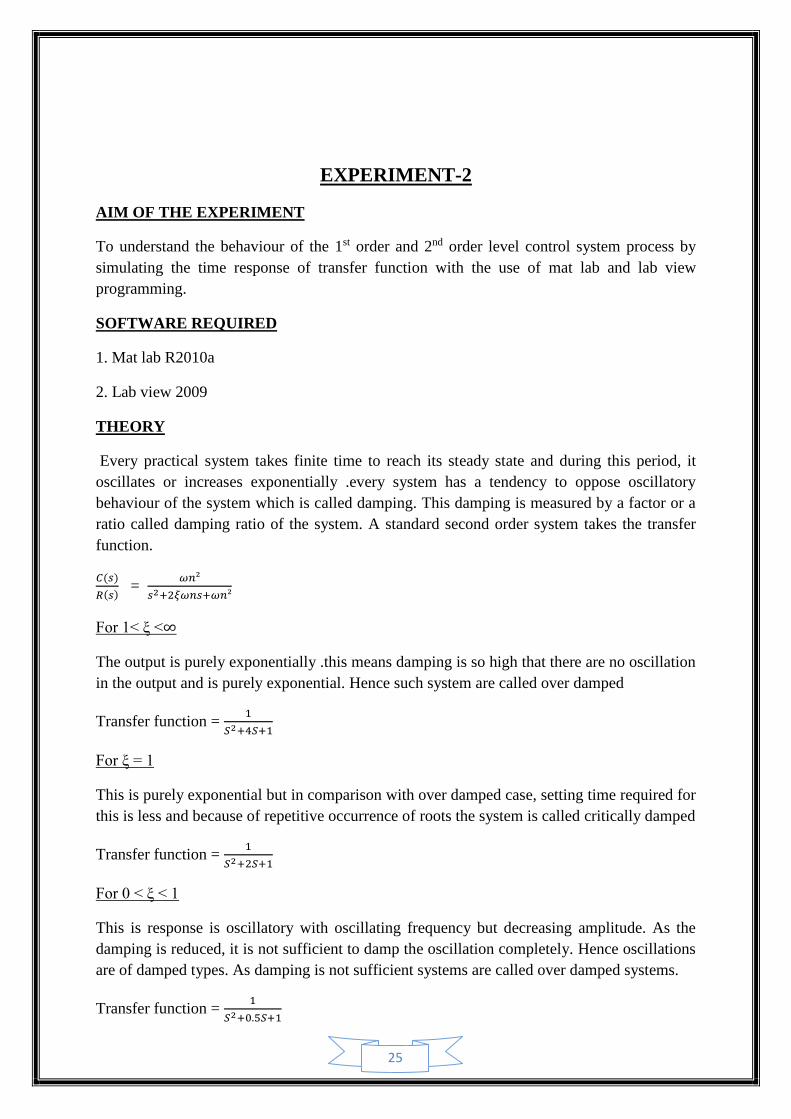
The output is purely exponentially .this means damping is so high that there are no oscillation
in the output and is purely exponential. Hence such system are called over damped
Transfer function = 1
𝑆2+4𝑆+1
For ξ = 1
This is purely exponential but in comparison with over damped case, setting time required for
this is less and because of repetitive occurrence of roots the system is called critically damped
Transfer function = 1
𝑆2+2𝑆+1
For 0 ˂ ξ ˂ 1
This is response is oscillatory with oscillating frequency but decreasing amplitude. As the
damping is reduced, it is not sufficient to damp the oscillation completely. Hence oscillations
are of damped types. As damping is not sufficient systems are called over damped systems.
Transfer function = 1
𝑆2+0.5𝑆+1
26
DIAGRAM: (MATLAB)
OUTPUT RESPONSE:
X AXIS=TIME
Y AXIS=AMPLITUDE
27
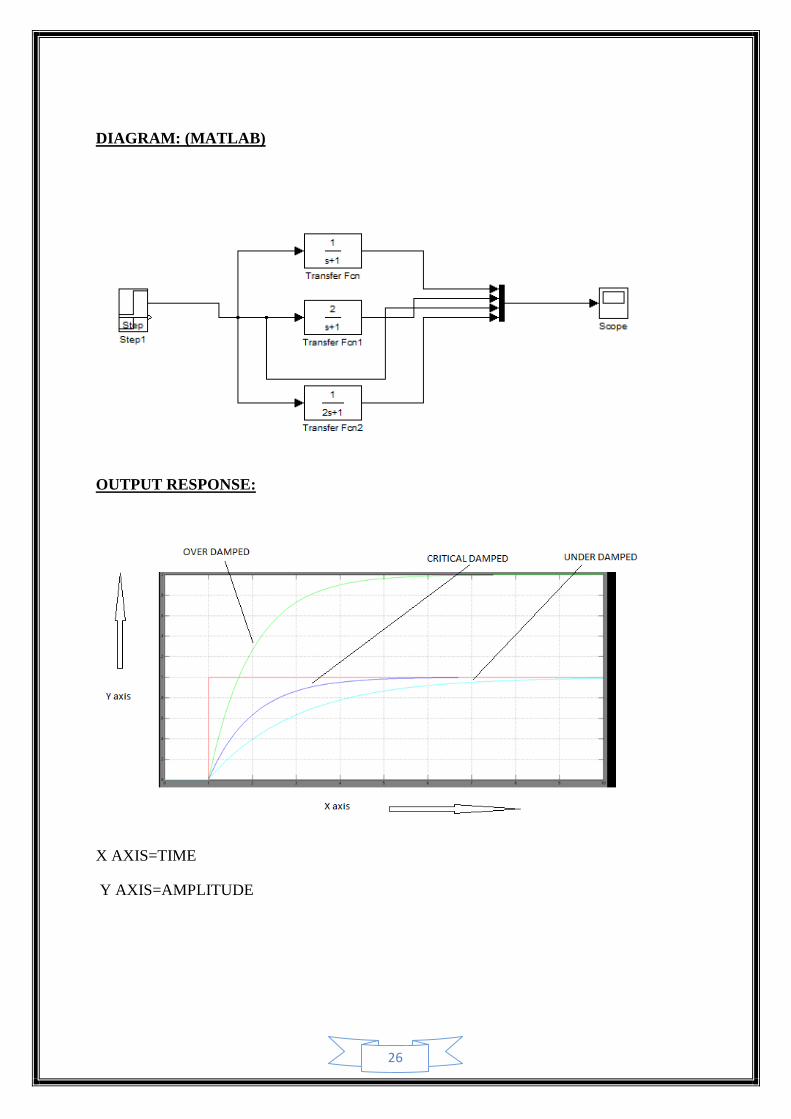
DIAGRAM: (MATLAB)
OUTPUT RESPONSE FOR SCOPE:
X AXIS=TIME
Y AXIS=AMPLITUDE
28
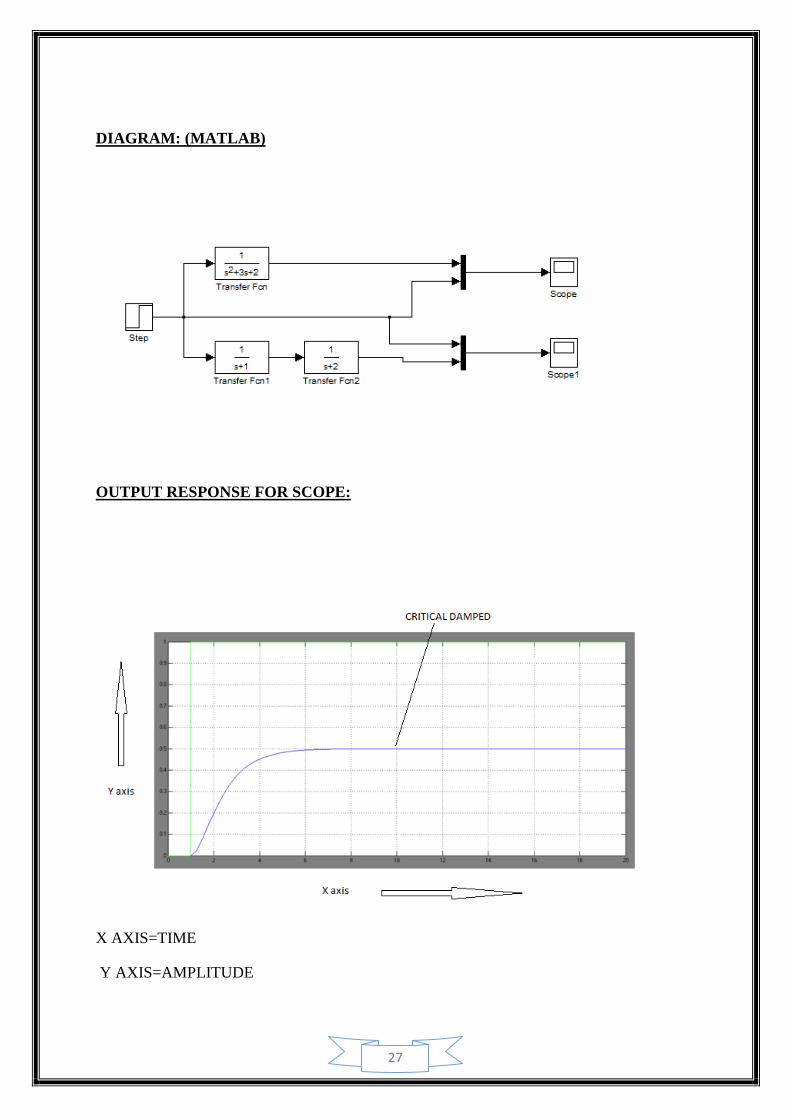
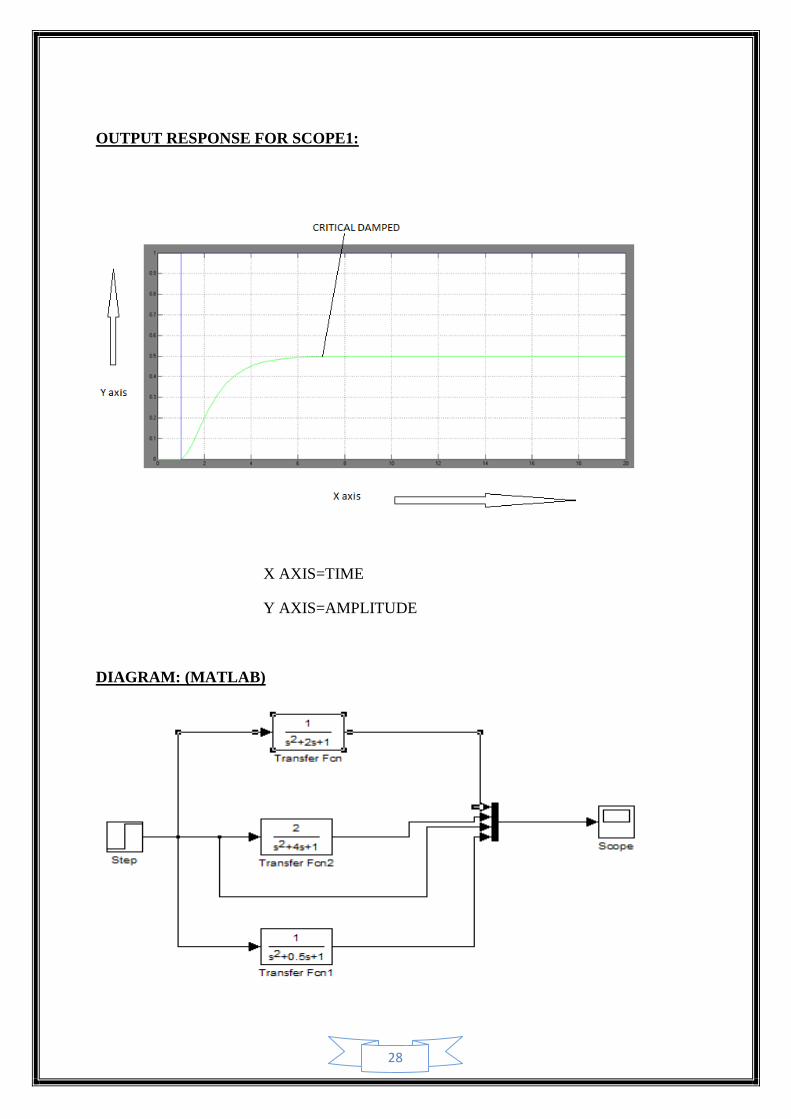
OUTPUT RESPONSE FOR SCOPE1:
X AXIS=TIME
Y AXIS=AMPLITUDE
DIAGRAM: (MATLAB)
29
OUTPUT RESPONSE:
X AXIS=TIME
Y AXIS=AMPLITUDE
MATLAB: (DIAGRAM)
30
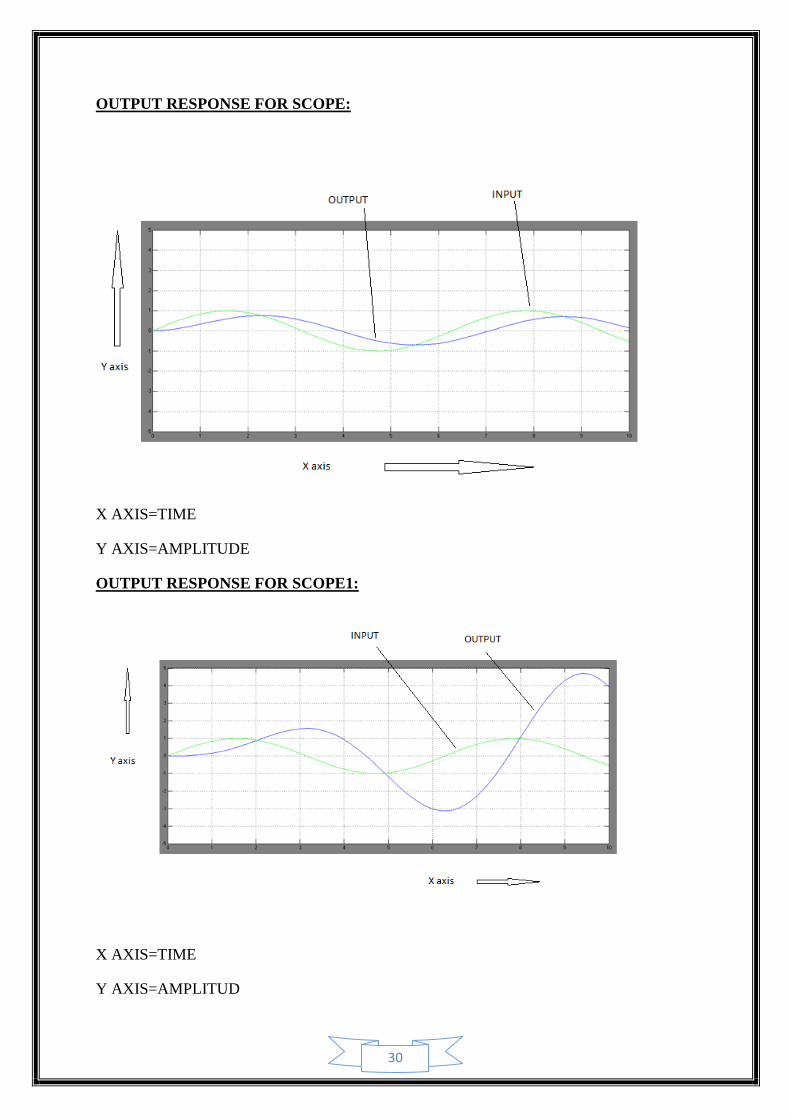
OUTPUT RESPONSE FOR SCOPE:
X AXIS=TIME
Y AXIS=AMPLITUDE
OUTPUT RESPONSE FOR SCOPE1:
X AXIS=TIME
Y AXIS=AMPLITUD
31
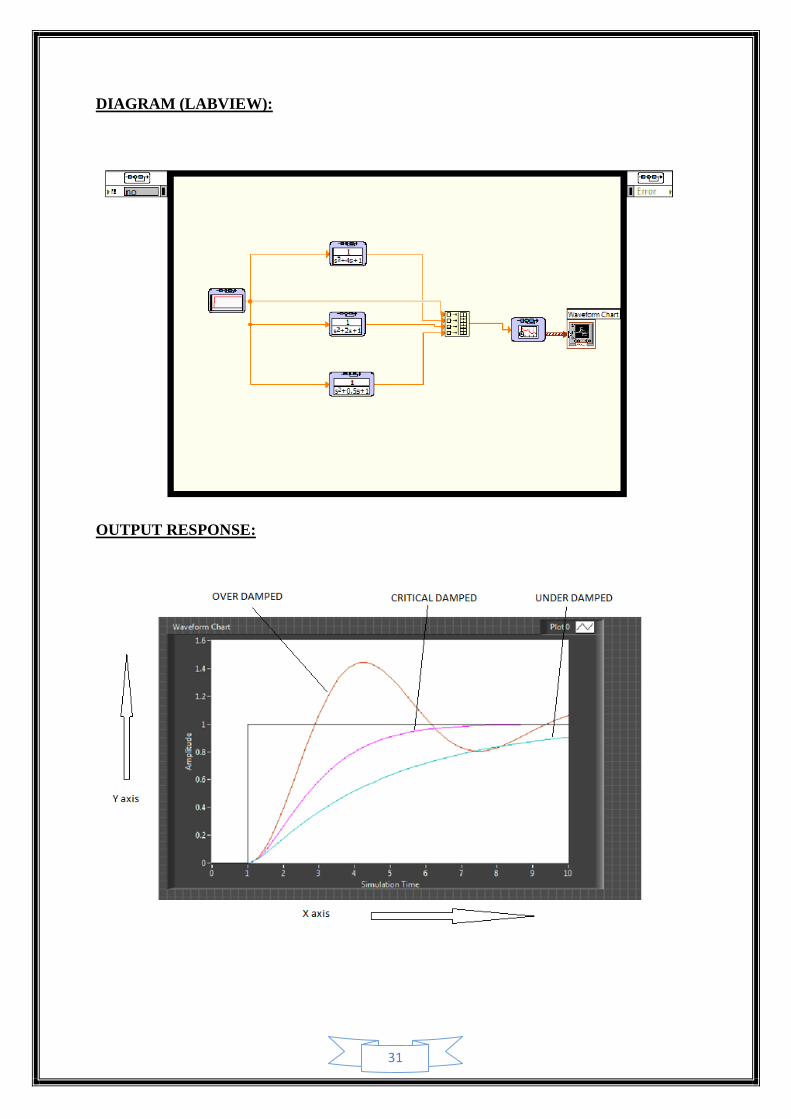
DIAGRAM (LABVIEW):
OUTPUT RESPONSE:
32
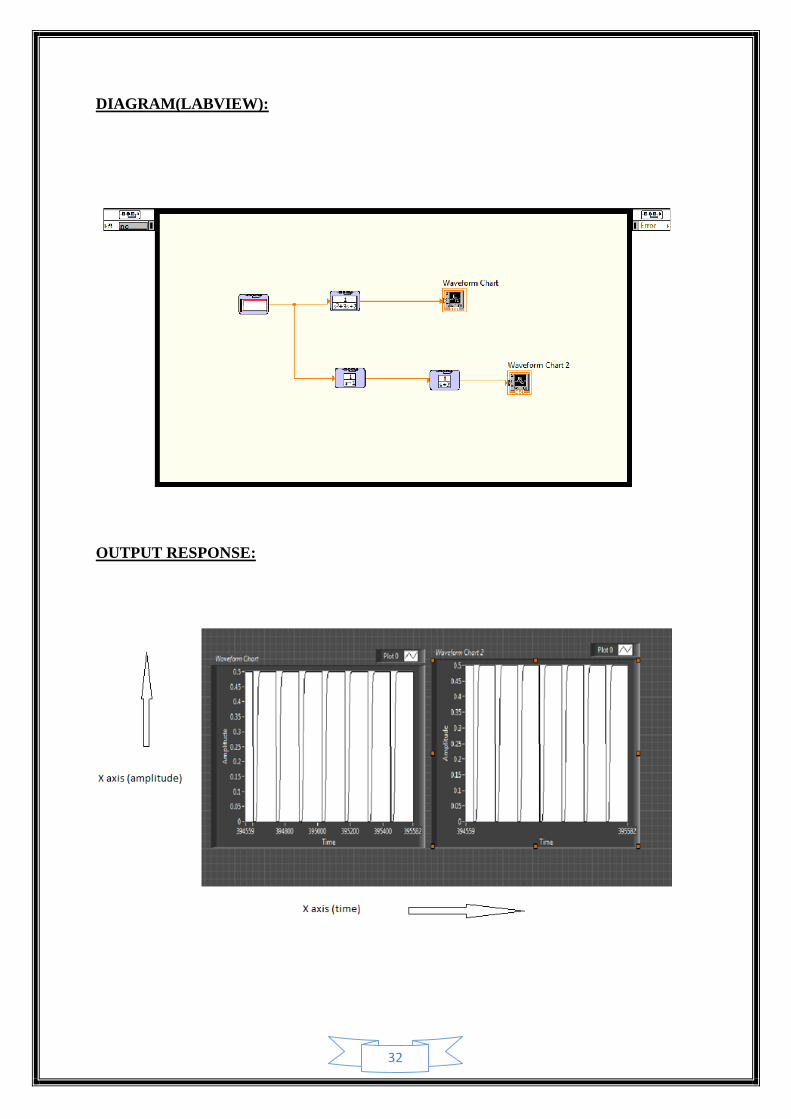
DIAGRAM(LABVIEW):
OUTPUT RESPONSE:
33
DIAGRAM(LABVIEW):
OUTPUT RESPONSE:
34
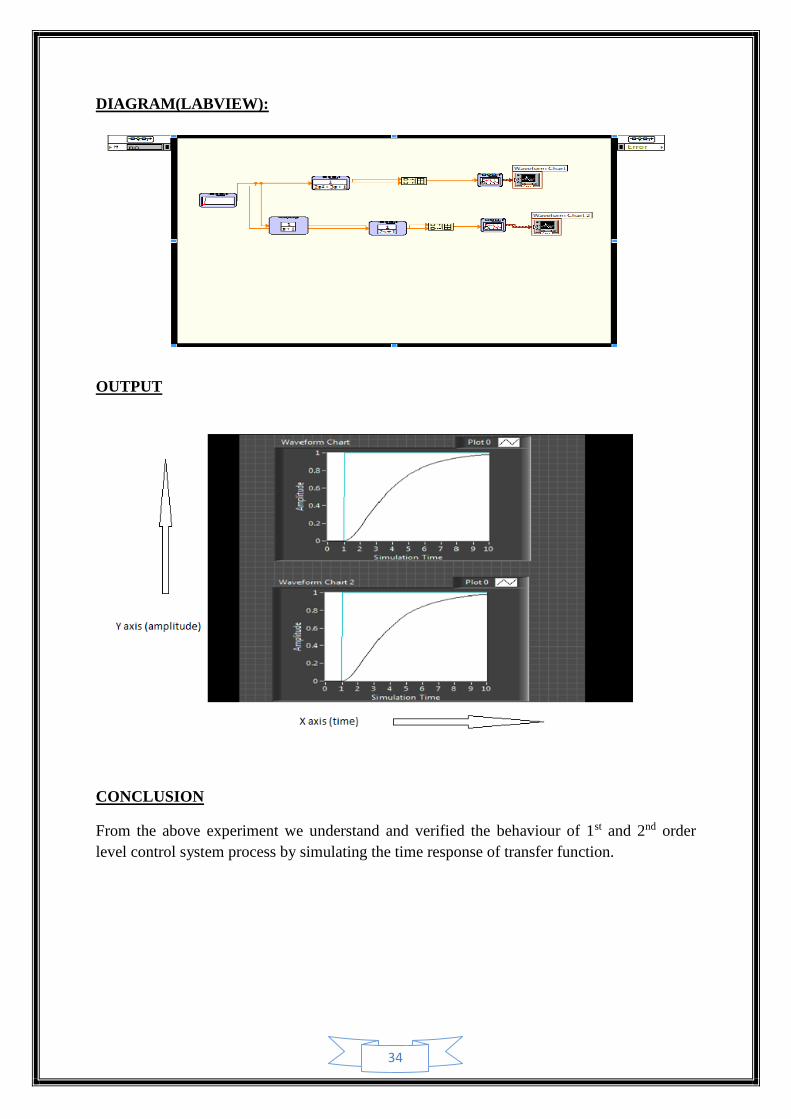
DIAGRAM(LABVIEW):
OUTPUT
CONCLUSION
From the above experiment we understand and verified the behaviour of 1st and 2nd order
level control system process by simulating the time response of transfer function.
35
EXPERIMENT-3
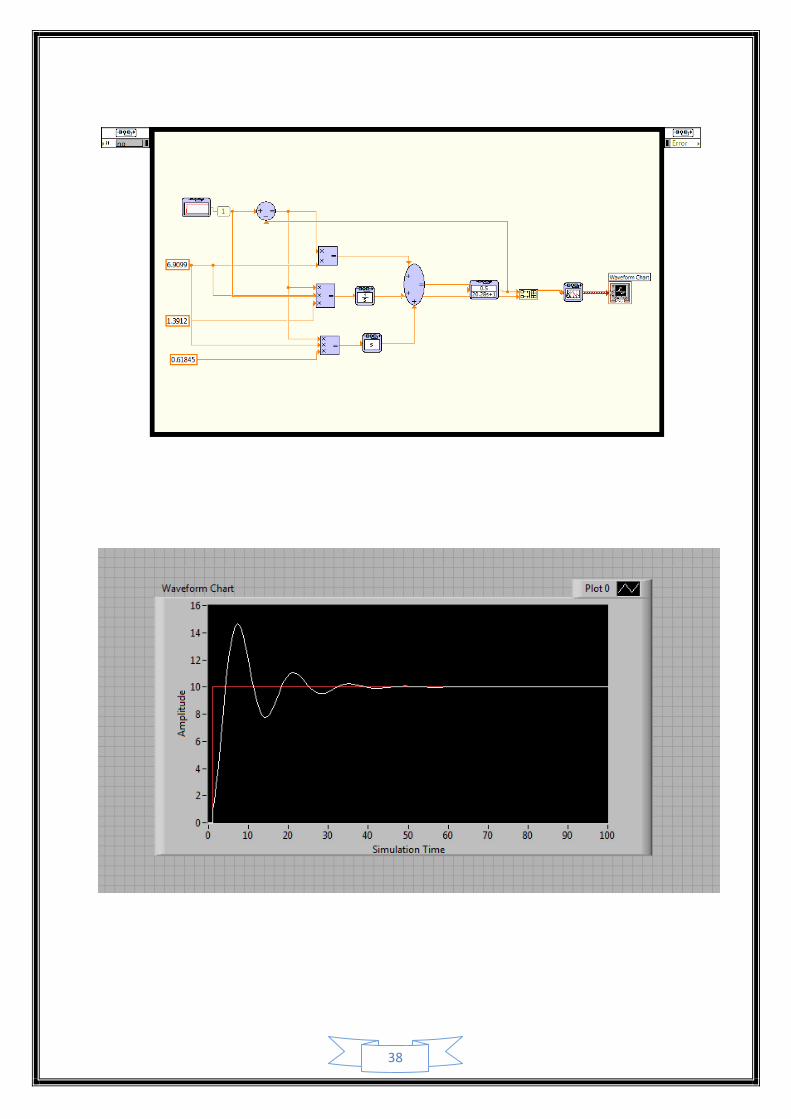
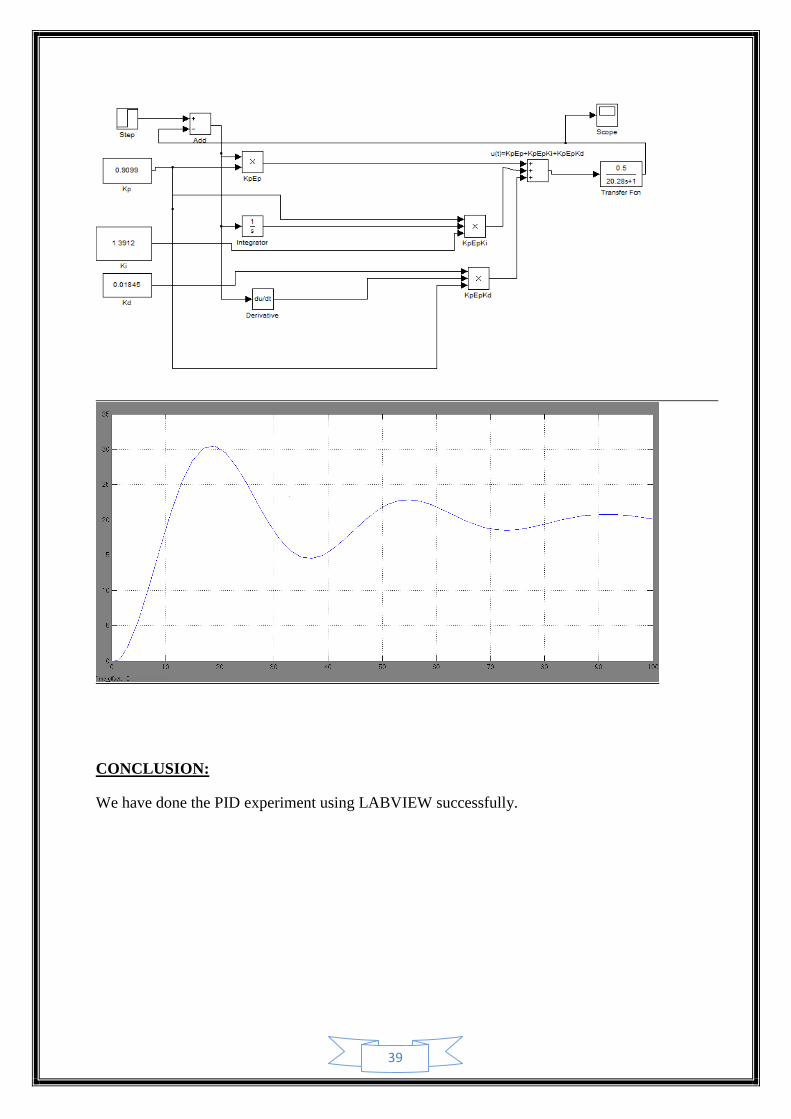
AIM OF THE EXPERIMENT:
To design a PID controller and compare response of the controller at the different point.
SOFTWARE REQUIREMENT:
MATLAB 2009b & LABVIEW 2010
THEORY: A proportional-integral-derivative controller (PID controller)is a
Common feedback loop component in industrial control systems (see also
Control theory).
The controller takes a measured value from a process or other apparatus
And compares it with a reference set point value. The difference (or “error" signal) is then
used to adjust some input to the process in order to bring the process' measured value back to
its desired set point. Unlike simpler controllers, the PID can adjust process outputs based on
the history and rate of change of the error signal, which gives more accurate and stable
control. PID controllers do not require advanced mathematics to design and can be easily
adjusted (or "tuned") to the desired application, unlike more complicated control algorithms
based on optimal control theory.
Control loop basics
Intuitively, the PID loop tries to automate what an intelligent operator with a gauge and a
control knob would do. The operator would read a gauge showing the output measurement of
a process, and use the knob to adjust the input of the process (the “action") until the process's
output measurement stabilizes at the desired value on the gauge. In older control literature
this adjustment process is called a "reset" action. The position of the needle on the gauge is a
"measurement", "process value" or “process variable". The desired value on the gauge is
called a "set point" (also called "set value"). The difference between the
Gauge’s needle and the set point is the "error".
A control loop consists of three parts:
1. Measurement by a sensor connected to the process (or the "plant"),
2. Decision in a controller element,
3. Action through an output device ("actuator") such as a control valve.
As the controller reads a sensor, it subtracts this measurement from the "setpoint" to
determine the "error". It then uses the error to calculate a correction to the process's input
variable (the "action") so that this correction will remove the error from the process's output
measurement.
In a PID loop, correction is calculated from the error in three ways: cancel out the current
error directly (Proportional), the amount of time the error has continued uncorrected
(Integral), and anticipate the future error from the rate of change of the error over time.
36
THEORY:
The PID loop adds positive corrections, removing error from the process's controllable
variable (its input).Differing terms are used in the process control industry: The "process
variable" is also called the "process's input" or "controller's
Output." The process's output is also called the "measurement" or "controller's input. “This
"up a bit, down a bit" movement of the process's input variable is how the PID loop
automatically finds the correct level of input for the process. "Turning the control knob"
reduces error, adjusting the process's input to keep the process's measured output at the set
point.
The error is found by subtracting the measured quantity from the set point.
"PID" is named after its three correcting calculations, whose sum constitutes the output of the
PID controller.
1. Proportional - To handle the immediate error, the error is multiplied by a constant P
(for "proportional"), and added to the controlled quantity. P is only valid in the band
over which a controller's output is proportional to the error of the system. For
example, for a heater, a controller with a proportional band of 10 °C and a set point of
20 °C would have an output of 100% at 10 °C, 50% at 15 °C and 10% at 19 °C. Note
that when the error is zero, a proportional controller's output is zero.
2. Integral - To learn from the past, the error is integrated (added up) over a period of
time, and then multiplied by a constant I (making an average), and added to the
controlled quantity. A simple proportional system either oscillates, moving back and
forth around the set point because there's nothing to remove the error when it
overshoots, or oscillates and/or stabilizes at a too low or too high value. By adding a
proportion of the average error to the process input, the average difference between
the process output and the set point is continually reduced. Therefore, eventually, a
well-tuned PID loop's process output will settle down at the set point. As an example,
a system that has a tendency for a lower value (heater in a cold environment), a
simple proportional system would oscillate and/or stabilize at a too low value because
when zero error is reached P is also zero thereby halting the system until it again is
too low.
3. Derivative - To handle the future, the first derivative (the slope of the error) over time
is calculated, and multiplied by another constant D, and also added to the controlled
quantity. The derivative term controls the response to a change in the system. The
larger the derivative term, the more rapidly the controller responds to changes in the
process's output. Its D term is the reason term is the reason a PID loop is also
sometimes called a "predictive controller." The D term is reduced when trying to
dampen a controller's response to short term changes. Practical controllers for slow
processes can even do without D term.
More technically, a PID loop can be characterized as a filter applied to a complex frequency-
domain system. This is useful in order to calculate whether it will actually reach a stable
value. If the values are chosen incorrectly, the controlled process input can oscillate, and the
process output may never stay at the set point.
37
A PID controller is called a PI, PD, or P controller in the absence of respective control
actions. It may be noted that EWMA (Exponential Weighted Moving Average) controller is
equivalent to PI controller.
The generic transfer function for a PID controller of the interacting form is
With C being a constant which depends on the bandwidth of the controlled system.
Traditionally, the output of the controller (i.e. the input to the process) is given by
Where Pcontrib, Icon rib, and Dcontrib are the feedback contributions from the PID
controller, defined below:
Where e(t) = Set point�� Measurement (t) is the error signal, and Kp, Ki, Kd are contents
that are used to tune the PID control loop:
1. Kp: Proportional Gain - Larger Kp typically means faster response since the larger
the error, the larger the feedback to compensate.
2. Ki: Integral Gain - Larger Ki implies steady state errors are eliminated quicker. The
trade-off is larger overshoot: any negative error integrated during transient response
must be integrated away by positive error before we reach steady state.
3. Kd: Derivative Gain - Larger Kd decreases overshoot, but slows down transient
response.
Normally the controller is implemented with the Kp gain applied to the Icontrib, and Dcontrib
terms as well in the following form;
Most standard tuning methods, such as Ziegler-Nichols and others, are based on this form, as
it reduces interaction. In this form, the Kip and Kdp gains relate only to dynamics of the
process, and the Kp (proportional gain) relates to the gain of the process. Often, one deals
with discrete time intervals instead of the continuity. Thus, the PID controller may also be
dealt with recursively:
38
39
CONCLUSION:
We have done the PID experiment using LABVIEW successfully.
40
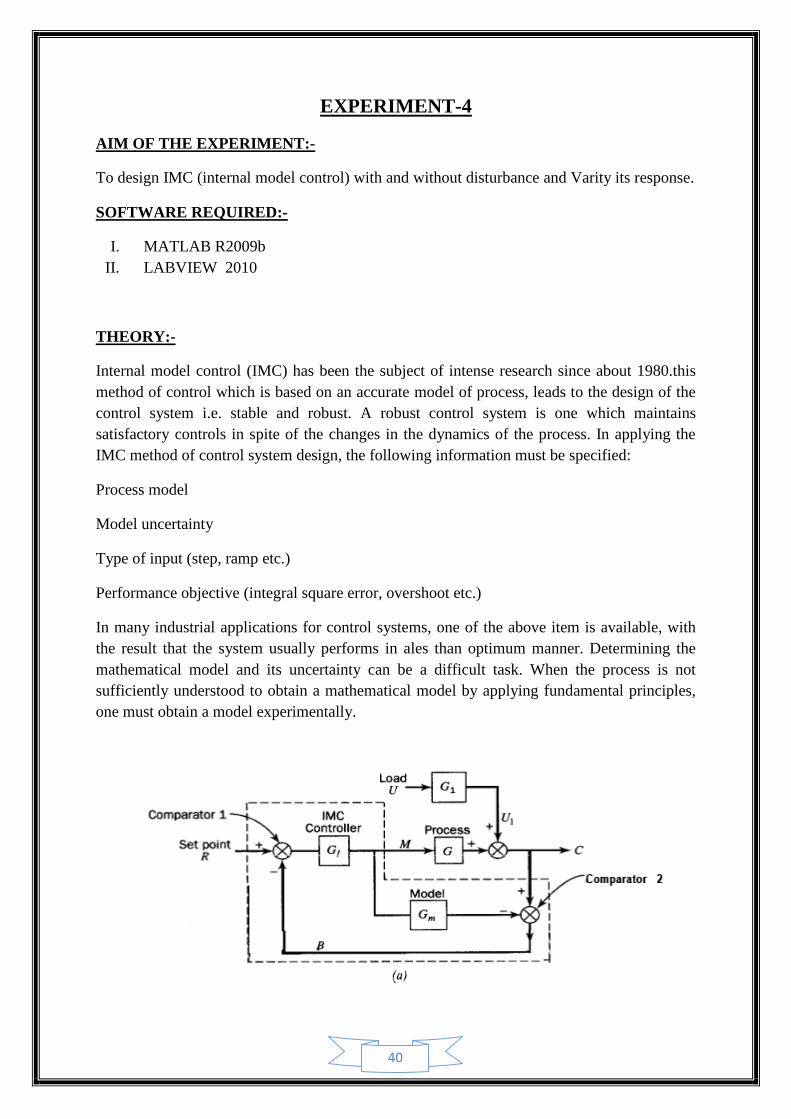
EXPERIMENT-4
AIM OF THE EXPERIMENT:-
To design IMC (internal model control) with and without disturbance and Varity its response.
SOFTWARE REQUIRED:-
I. MATLAB R2009b
II. LABVIEW 2010
THEORY:-
Internal model control (IMC) has been the subject of intense research since about 1980.this
method of control which is based on an accurate model of process, leads to the design of the
control system i.e. stable and robust. A robust control system is one which maintains
satisfactory controls in spite of the changes in the dynamics of the process. In applying the
IMC method of control system design, the following information must be specified:
Process model
Model uncertainty
Type of input (step, ramp etc.)
Performance objective (integral square error, overshoot etc.)
In many industrial applications for control systems, one of the above item is available, with
the result that the system usually performs in ales than optimum manner. Determining the
mathematical model and its uncertainty can be a difficult task. When the process is not
sufficiently understood to obtain a mathematical model by applying fundamental principles,
one must obtain a model experimentally.
41
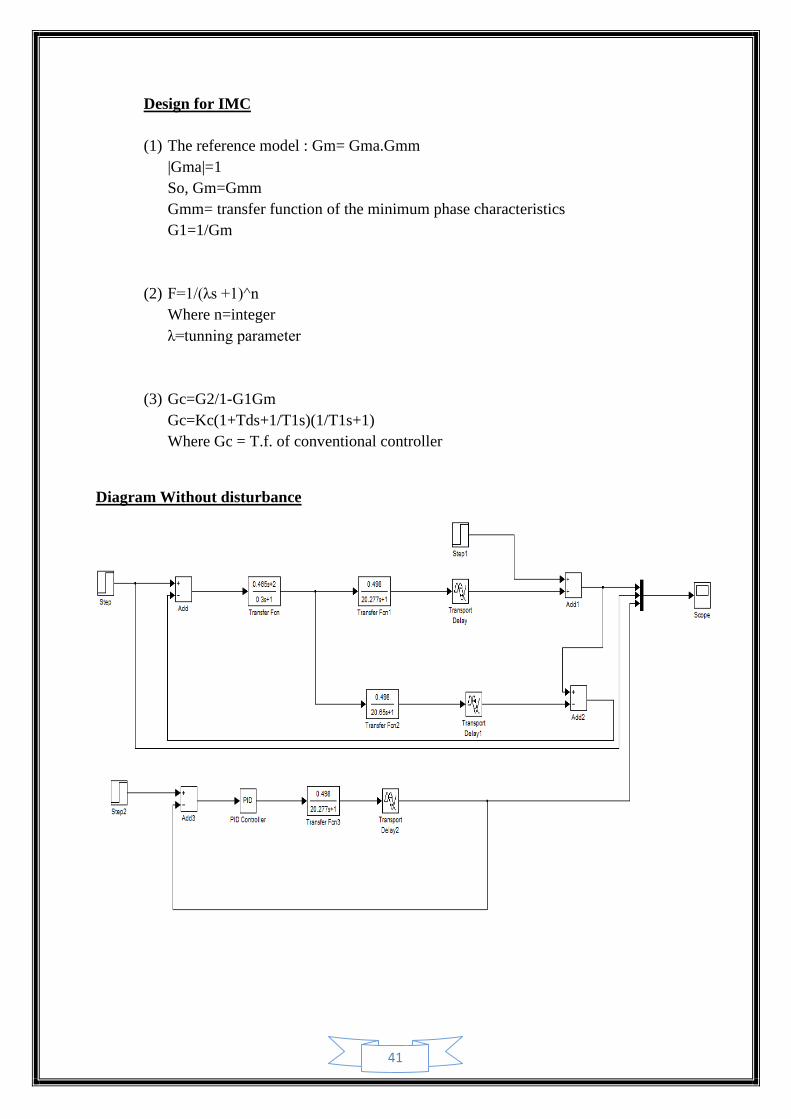
Design for IMC
(1) The reference model : Gm= Gma.Gmm
|Gma|=1
So, Gm=Gmm
Gmm= transfer function of the minimum phase characteristics
G1=1/Gm
(2) F=1/(λs +1)^n
Where n=integer
λ=tunning parameter
(3) Gc=G2/1-G1Gm
Gc=Kc(1+Tds+1/T1s)(1/T1s+1)
Where Gc = T.f. of conventional controller
Diagram Without disturbance
42
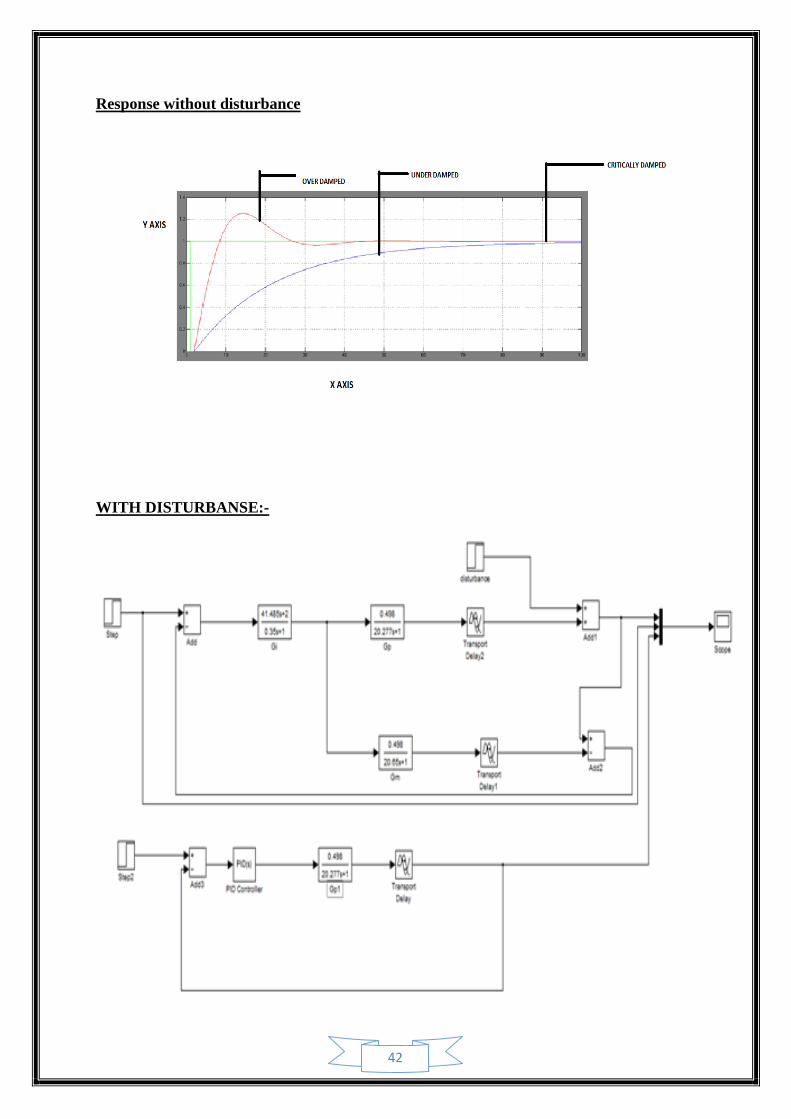
Response without disturbance
WITH DISTURBANSE:-
43
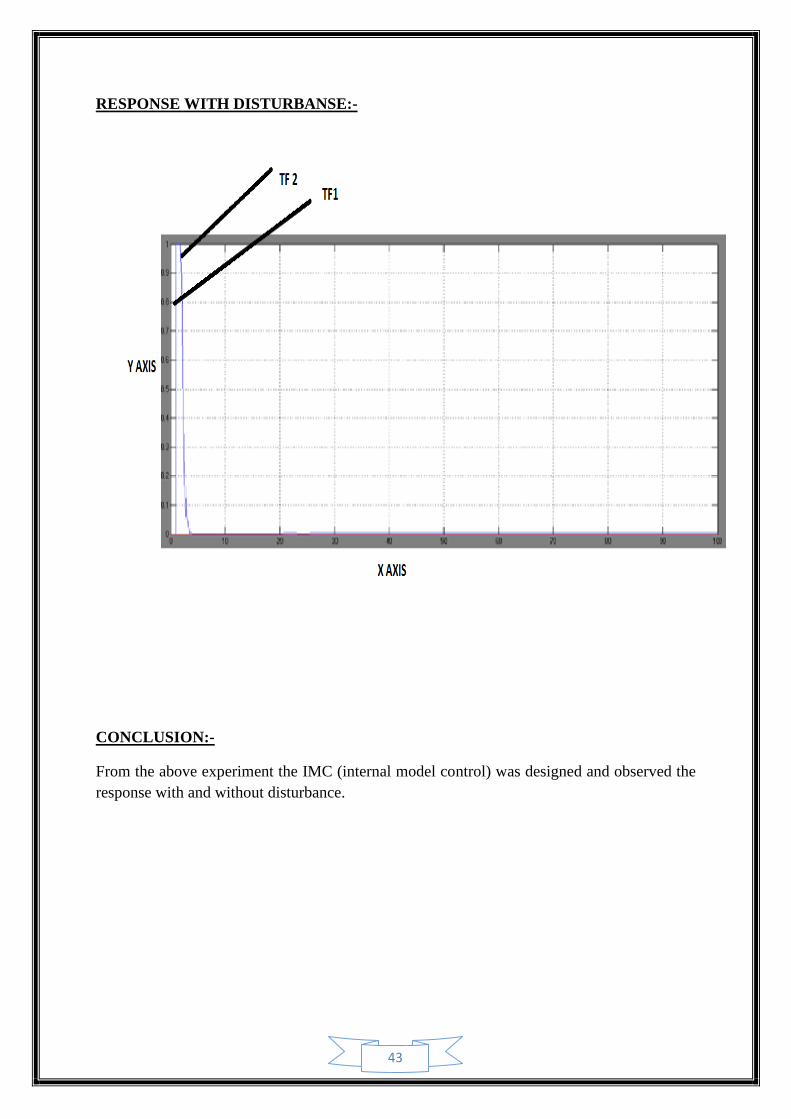
RESPONSE WITH DISTURBANSE:-
CONCLUSION:-
From the above experiment the IMC (internal model control) was designed and observed the
response with and without disturbance.
44
EXPERIMENT-5
AIM OF THE EXPERIMENT:
Design controller tuning methods using Lab VIEW.
APPARATUS REQUIRED:
Lab VIEW 2010 software.
THEORY:-
PID controllers are probably the most commonly used controller structures in industry. They
do, however, present some challenges to control and instrumentation engineers in the aspect
of tuning of the gains required for stability and good transient performance. There are several
prescriptive rules used in PID tuning. An example is that proposed by Ziegler and Nichols in
the 1940's and described in this note.
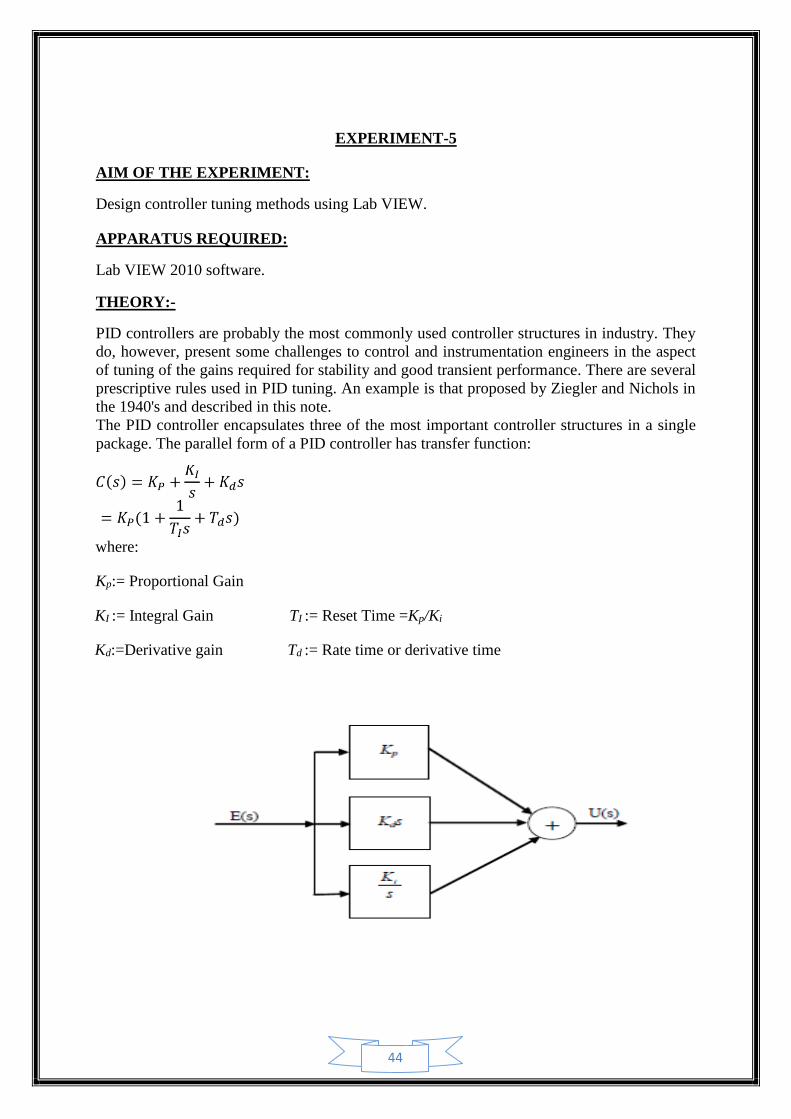
The PID controller encapsulates three of the most important controller structures in a single
package. The parallel form of a PID controller has transfer function:
where:
Kp:= Proportional Gain
KI := Integral Gain TI := Reset Time =Kp/Ki
Kd:=Derivative gain Td := Rate time or derivative time
45
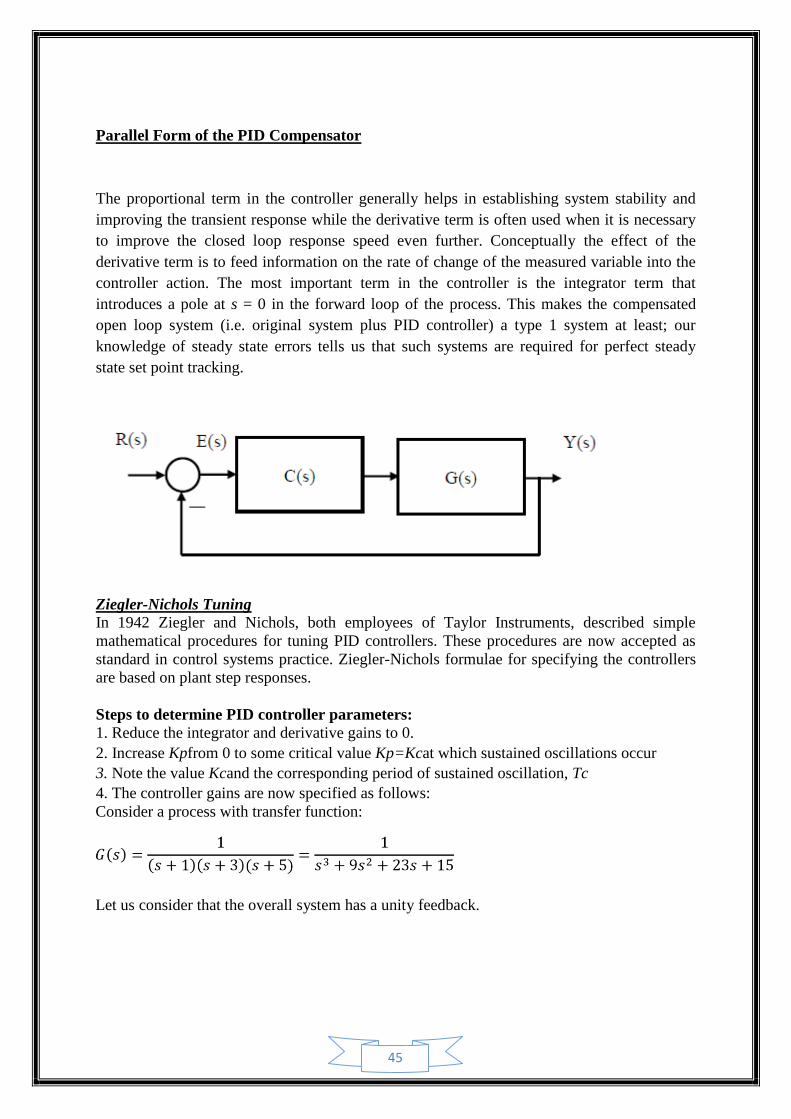
Parallel Form of the PID Compensator
The proportional term in the controller generally helps in establishing system stability and
improving the transient response while the derivative term is often used when it is necessary
to improve the closed loop response speed even further. Conceptually the effect of the
derivative term is to feed information on the rate of change of the measured variable into the
controller action. The most important term in the controller is the integrator term that
introduces a pole at s = 0 in the forward loop of the process. This makes the compensated
open loop system (i.e. original system plus PID controller) a type 1 system at least; our
knowledge of steady state errors tells us that such systems are required for perfect steady
state set point tracking.
Ziegler-Nichols Tuning
In 1942 Ziegler and Nichols, both employees of Taylor Instruments, described simple
mathematical procedures for tuning PID controllers. These procedures are now accepted as
standard in control systems practice. Ziegler-Nichols formulae for specifying the controllers
are based on plant step responses.
Steps to determine PID controller parameters:
1. Reduce the integrator and derivative gains to 0.
2. Increase Kpfrom 0 to some critical value Kp=Kcat which sustained oscillations occur
3. Note the value Kcand the corresponding period of sustained oscillation, Tc
4. The controller gains are now specified as follows:
Consider a process with transfer function:
Let us consider that the overall system has a unity feedback.
46
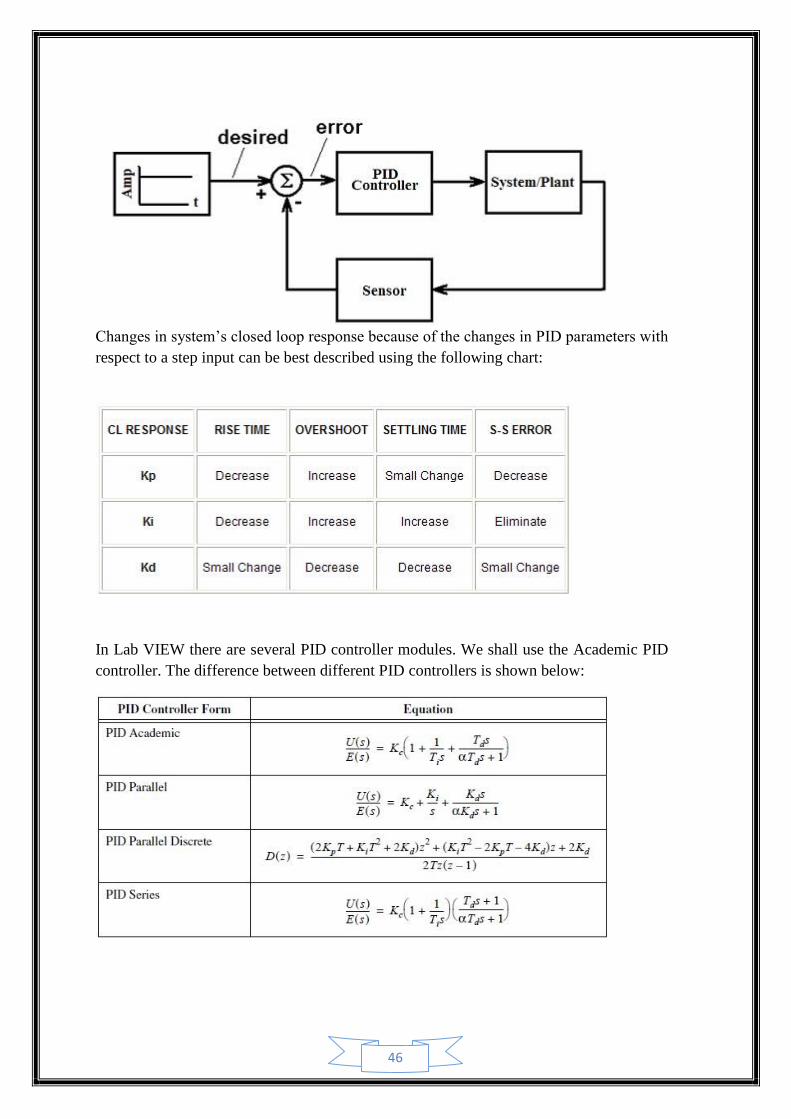
Changes in system’s closed loop response because of the changes in PID parameters with
respect to a step input can be best described using the following chart:
In Lab VIEW there are several PID controller modules. We shall use the Academic PID
controller. The difference between different PID controllers is shown below:
47
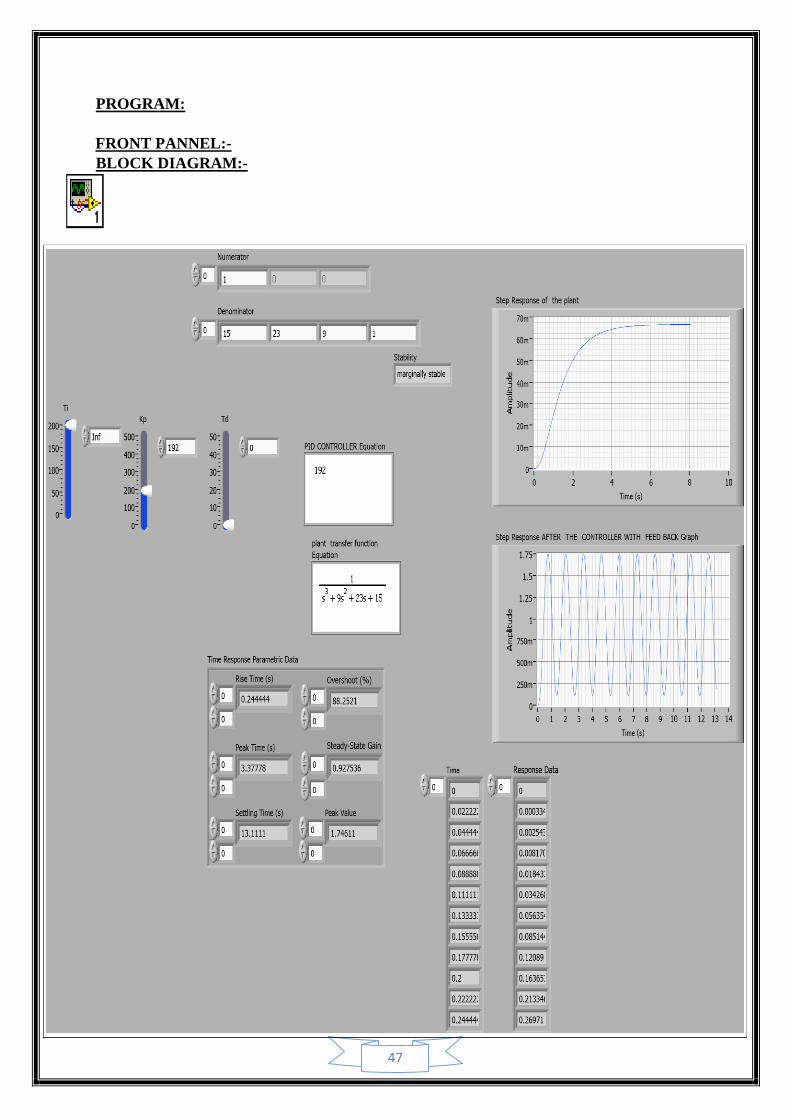
PROGRAM:
FRONT PANNEL:-
BLOCK DIAGRAM:-
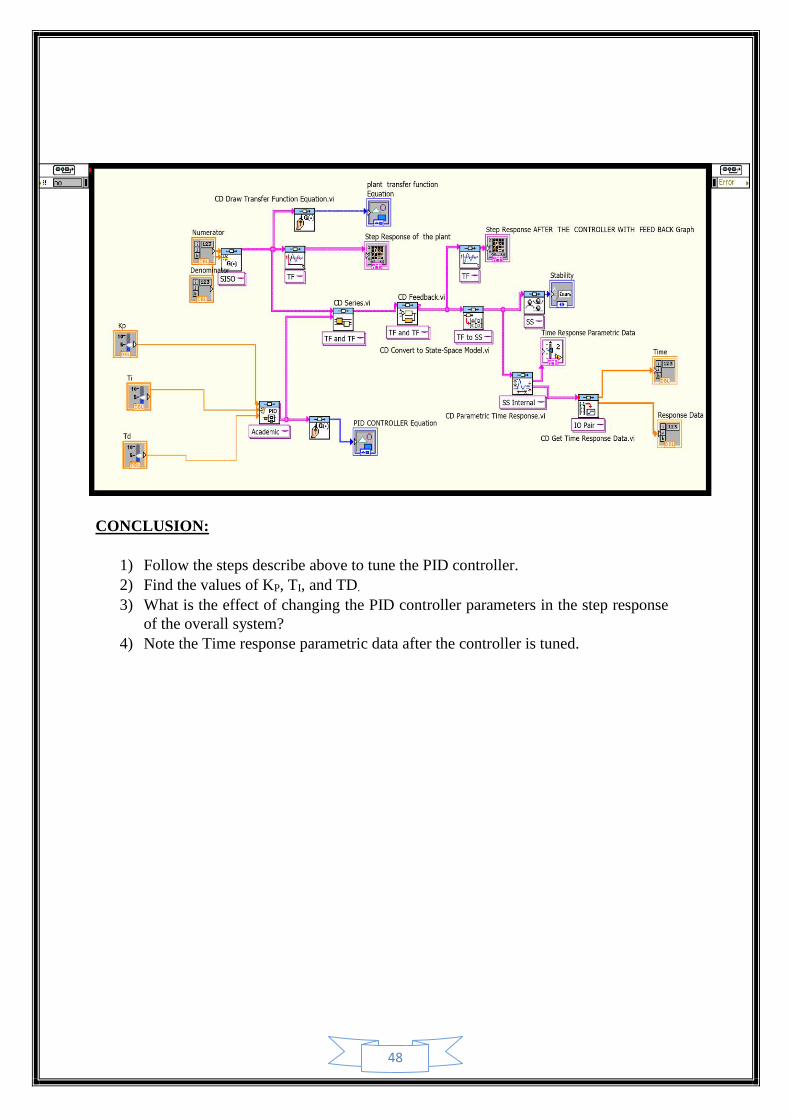
48
CONCLUSION:
1) Follow the steps describe above to tune the PID controller.
2) Find the values of KP, TI, and TD.
3) What is the effect of changing the PID controller parameters in the step response
of the overall system?
4) Note the Time response parametric data after the controller is tuned.
49
EXPERIMENT-6
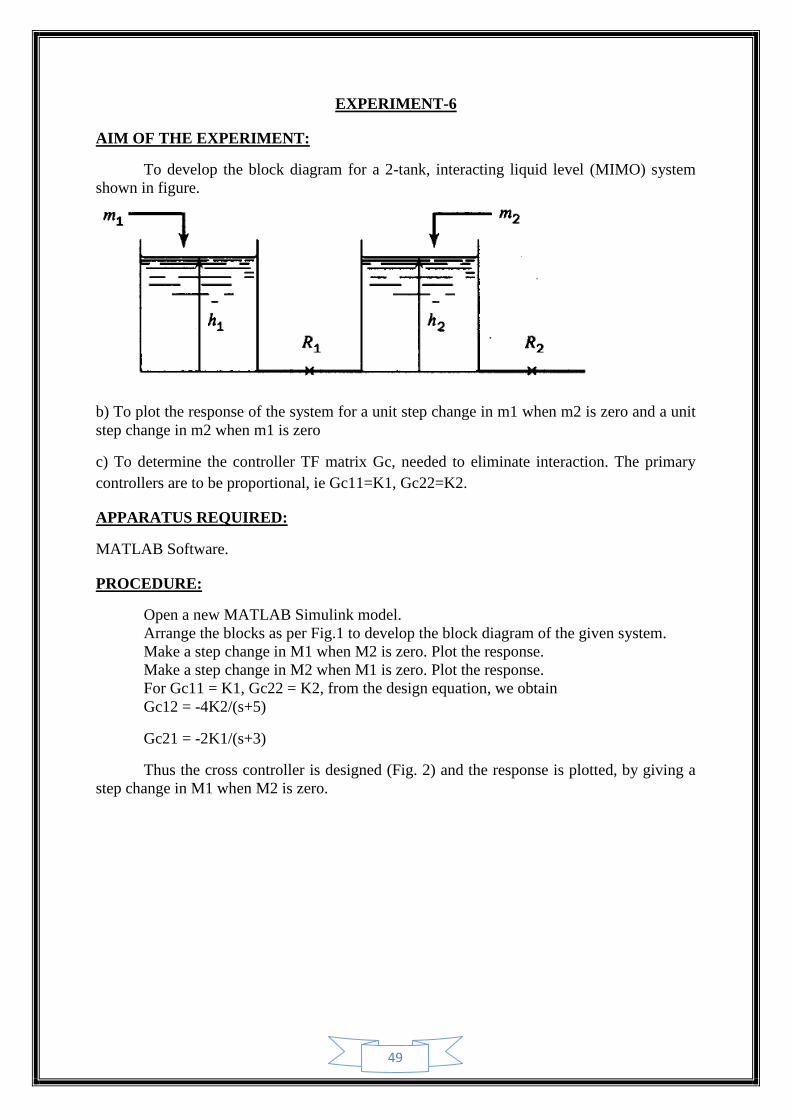
AIM OF THE EXPERIMENT:
To develop the block diagram for a 2-tank, interacting liquid level (MIMO) system
shown in figure.
b) To plot the response of the system for a unit step change in m1 when m2 is zero and a unit
step change in m2 when m1 is zero
c) To determine the controller TF matrix Gc, needed to eliminate interaction. The primary
controllers are to be proportional, ie Gc11=K1, Gc22=K2.
APPARATUS REQUIRED:
MATLAB Software.
PROCEDURE:
Open a new MATLAB Simulink model.
Arrange the blocks as per Fig.1 to develop the block diagram of the given system.
Make a step change in M1 when M2 is zero. Plot the response.
Make a step change in M2 when M1 is zero. Plot the response.
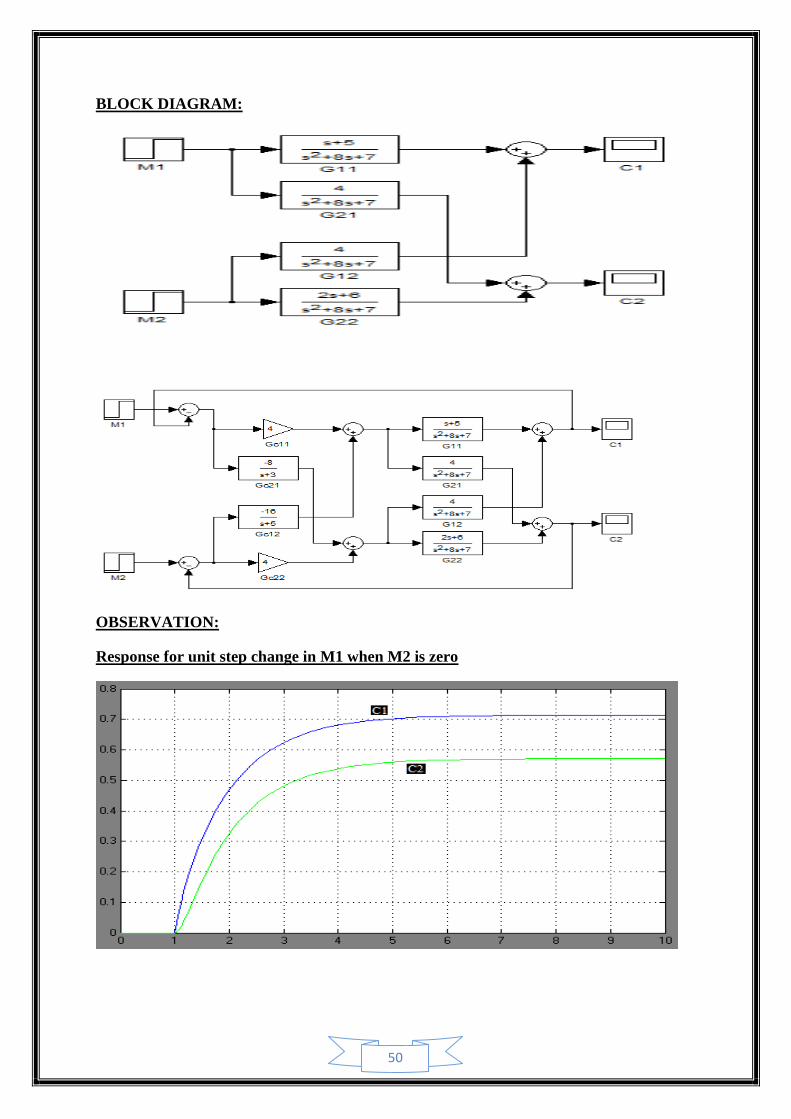
For Gc11 = K1, Gc22 = K2, from the design equation, we obtain
Gc12 = -4K2/(s+5)
Gc21 = -2K1/(s+3)
Thus the cross controller is designed (Fig. 2) and the response is plotted, by giving a
step change in M1 when M2 is zero.
50
BLOCK DIAGRAM:
OBSERVATION:
Response for unit step change in M1 when M2 is zero
51
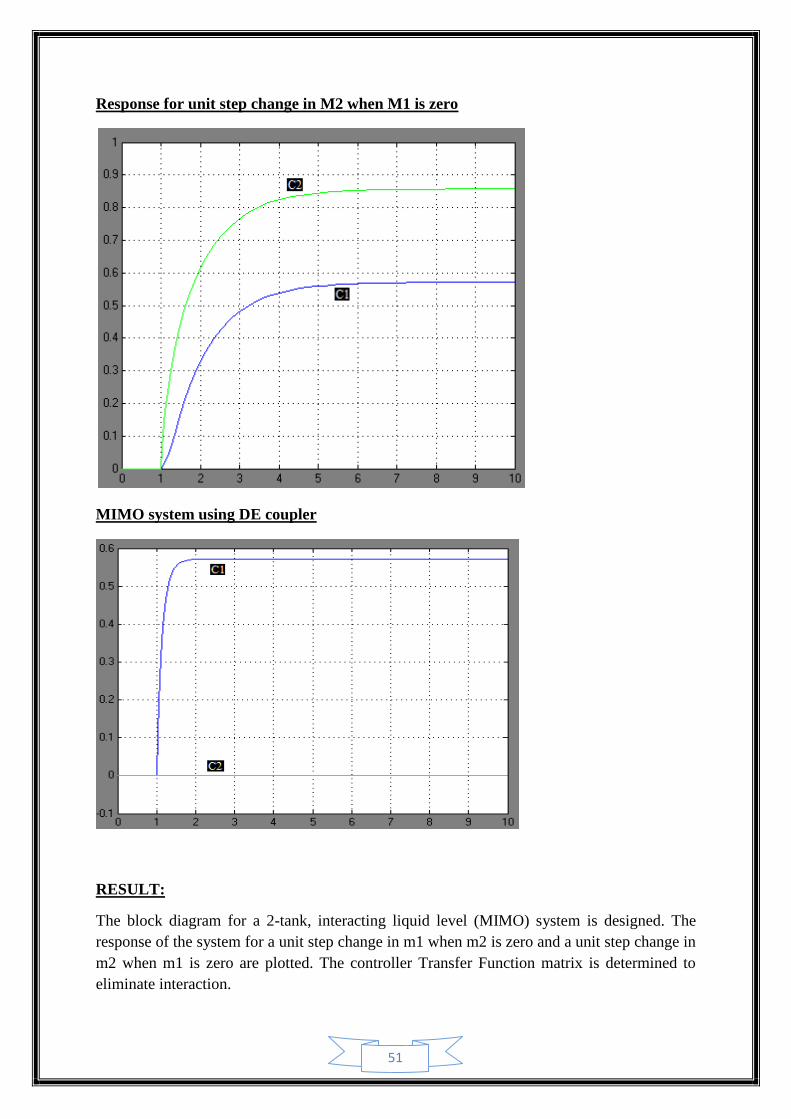
Response for unit step change in M2 when M1 is zero
MIMO system using DE coupler
RESULT:
The block diagram for a 2-tank, interacting liquid level (MIMO) system is designed. The
response of the system for a unit step change in m1 when m2 is zero and a unit step change in
m2 when m1 is zero are plotted. The controller Transfer Function matrix is determined to
eliminate interaction.
52
EXPERIMENT-7
AIM OF THE EXPERIMENT:
a) To determine the values of all adjustable parameters of feed-forward and feed-back control
algorithm
b) To compare the response of the system for a unit step change in load for feed-back control
and feed-forward - feed-back control
APPARATUS REQUIRED:
MATLAB Software.
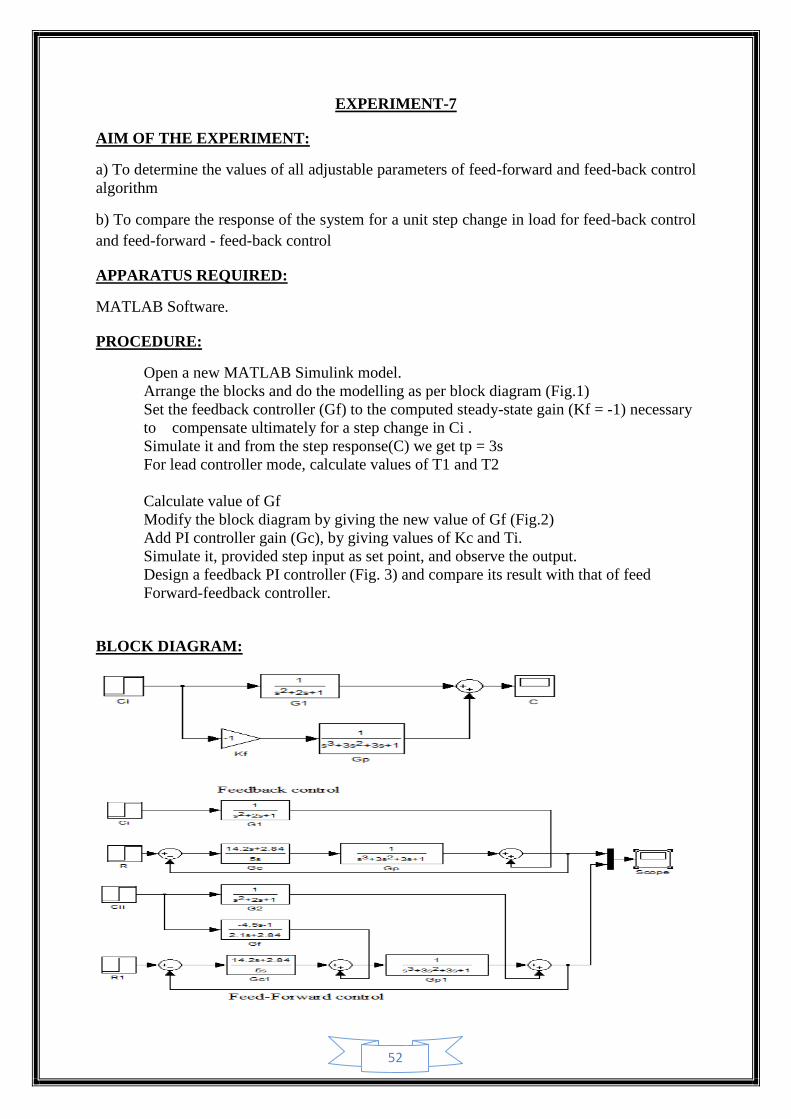
PROCEDURE:
Open a new MATLAB Simulink model.
Arrange the blocks and do the modelling as per block diagram (Fig.1)
Set the feedback controller (Gf) to the computed steady-state gain (Kf = -1) necessary
to compensate ultimately for a step change in Ci .
Simulate it and from the step response(C) we get tp = 3s
For lead controller mode, calculate values of T1 and T2
Calculate value of Gf
Modify the block diagram by giving the new value of Gf (Fig.2)
Add PI controller gain (Gc), by giving values of Kc and Ti.
Simulate it, provided step input as set point, and observe the output.
Design a feedback PI controller (Fig. 3) and compare its result with that of feed
Forward-feedback controller.
BLOCK DIAGRAM:
53
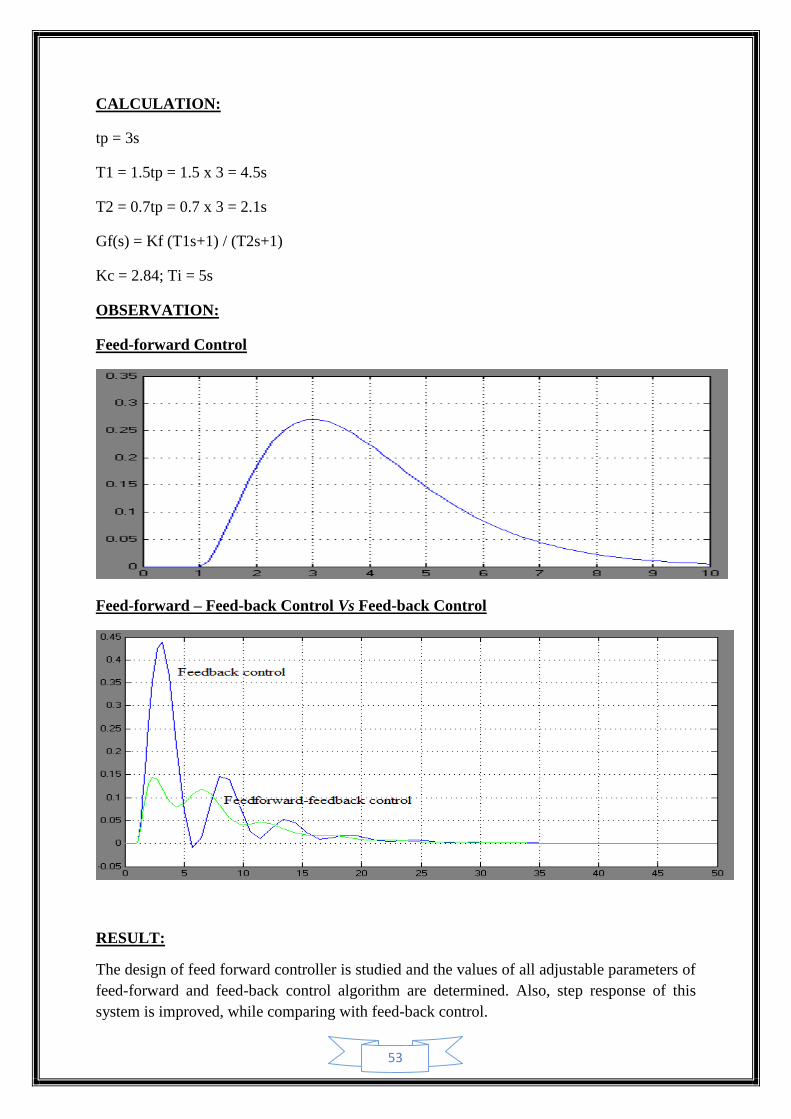
CALCULATION:
tp = 3s
T1 = 1.5tp = 1.5 x 3 = 4.5s
T2 = 0.7tp = 0.7 x 3 = 2.1s
Gf(s) = Kf (T1s+1) / (T2s+1)
Kc = 2.84; Ti = 5s
OBSERVATION:
Feed-forward Control
Feed-forward – Feed-back Control Vs Feed-back Control
RESULT:
The design of feed forward controller is studied and the values of all adjustable parameters of
feed-forward and feed-back control algorithm are determined. Also, step response of this
system is improved, while comparing with feed-back control.
54
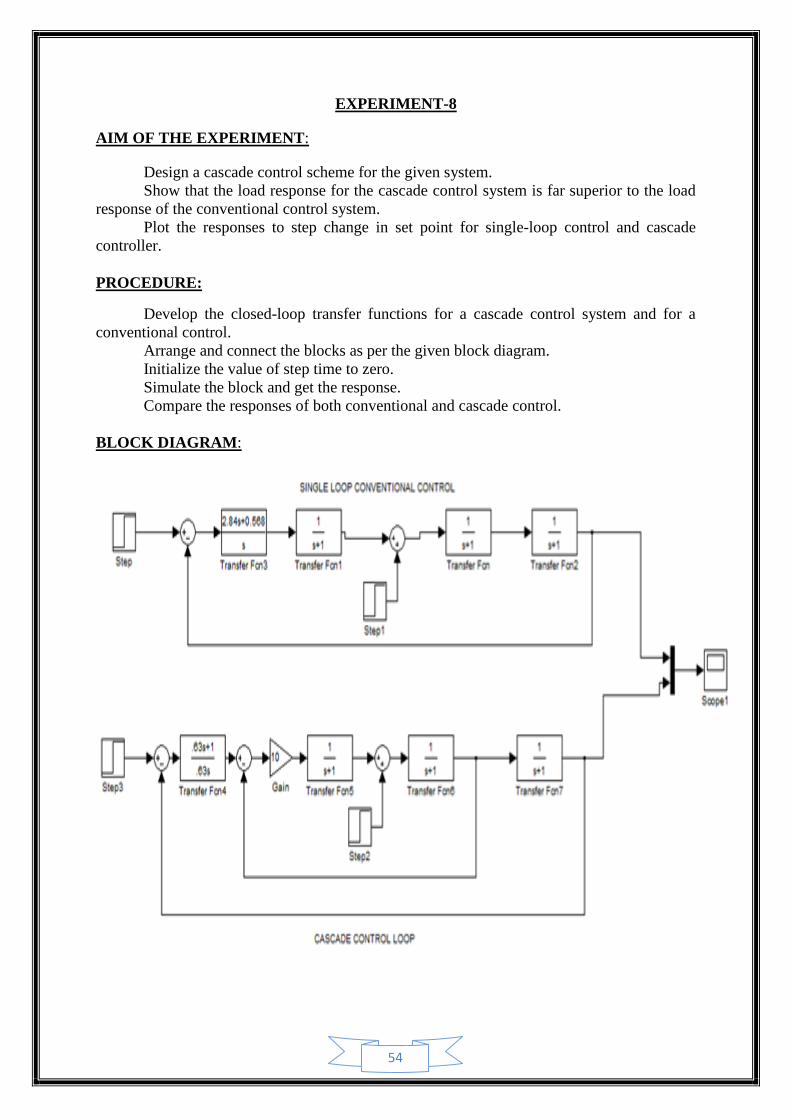
EXPERIMENT-8
AIM OF THE EXPERIMENT:
Design a cascade control scheme for the given system.
Show that the load response for the cascade control system is far superior to the load
response of the conventional control system.
Plot the responses to step change in set point for single-loop control and cascade
controller.
PROCEDURE:
Develop the closed-loop transfer functions for a cascade control system and for a
conventional control.
Arrange and connect the blocks as per the given block diagram.
Initialize the value of step time to zero.
Simulate the block and get the response.
Compare the responses of both conventional and cascade control.
BLOCK DIAGRAM:
55
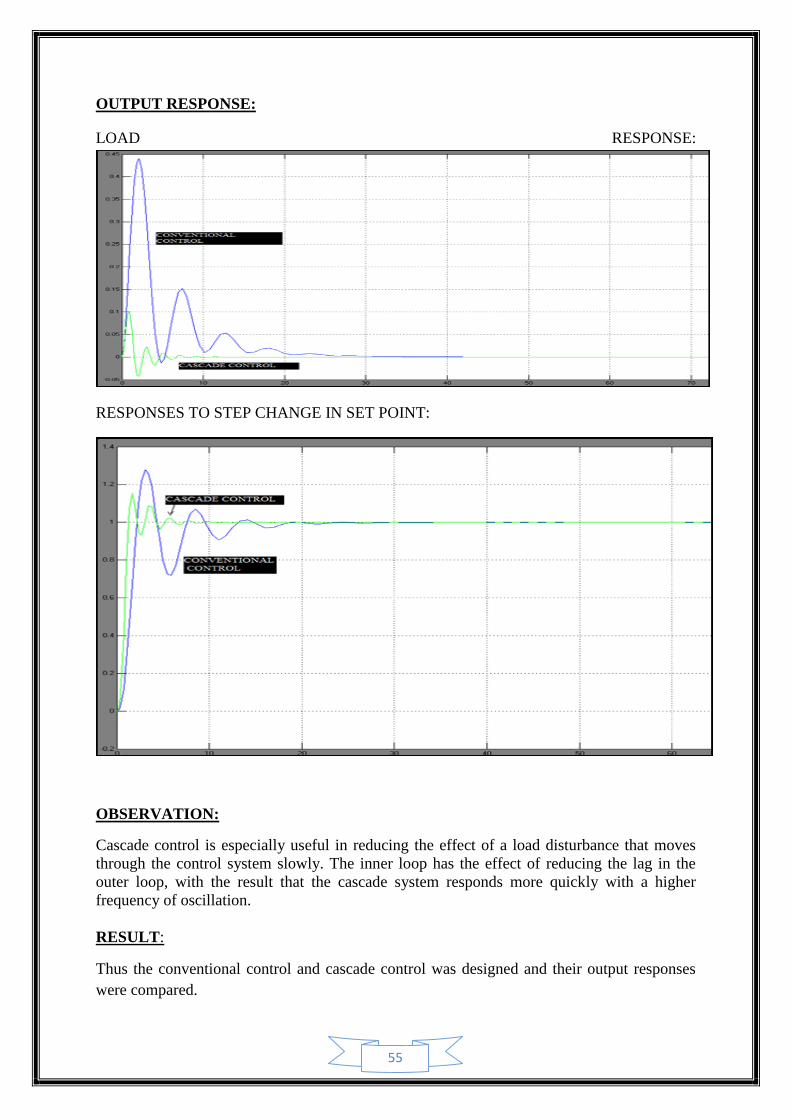
OUTPUT RESPONSE:
LOAD RESPONSE:
RESPONSES TO STEP CHANGE IN SET POINT:
OBSERVATION:
Cascade control is especially useful in reducing the effect of a load disturbance that moves
through the control system slowly. The inner loop has the effect of reducing the lag in the
outer loop, with the result that the cascade system responds more quickly with a higher
frequency of oscillation.
RESULT:
Thus the conventional control and cascade control was designed and their output responses
were compared.
56
EXPERIMENT-9
AIM OF THE EXPERIMENT:-
To study and familiarize the Keyence and to familiarize with the ladder builder software for
PLC using some examples.
THEORY:-
Programmable Controller
The modern solution for the problem of how to provide discrete- state control is to use a
computer based device called a programmable controller (PC) or programmable logical
controller.
The move from relay logic controllers to computer based controllers was an obvious one
because
The input and output variables of discrete state control systems are binary in nature
just as with a computer.
Many of the control relays of the ladder diagrams can be replaced by software which
means less hardware failure.
It is very easy to make changes in the programmed sequence of events when it is only
a change in software.
Special software such as time delay action and counters are easy to form in software.
The semiconductor industry developed solid-state devices that can control high power
ac/dc in response to low level commands from a computer including SCR’s and TRIAC’s.
Basic Elements:-
There are three basic elements:
The processor
The input/output modules
Software
BLOCK DIAGRAM
Add i/o and cpu module block diagram.
Processor
The processor is a computer that executes a program to perform operation specified in a
ladder diagram or a set of Boolean equations. The processor performs arithmetic and logic
operations on input variable data and determines the proper state of the output variables. The
processor operates under a permanent supervisory operating system that directs overall
operations from data inputs and outputs to execute users program.
57
Programming unit
It is an external electronic package that is connected to the programmable controller when
programming occurs. The unit then transmits that program into the memory of programmable
controller
Processor:
It’s a computer that executes a program to perform the operations specified in a ladder
diagram. The processor performs the arithmetic and logic operations at the input variable data
and determines the proper state of output variable.
Input modules:
The input modules examine the state of physical switches and other input devices and their
state in to a form suitable for the processor. It is able to accommodate a number of inputs
called channels. Each channel is often equipped with an indicator light to show if the
particular input is ON or OFF.
Output modules:
They supply ac power to external devices such as motors, lights, solenoids and so on just as
required in the ladder diagram. Internally, the output module accepts a 1 or 0 input from the
processor and uses this to turn ON or OFF ac power control devices such as TRIAC.
In this state output relay is solid state relay. An output module will have one to several
channels per unit. Each channel is provided with an indicator light to show if the particular
channel is being driven ON or OFF.
Description:-
The KV-16 contains 16 I/O modules, 10 input modules and 6 output modules.KV-16 PLC is
programmed using software (via) ladder builder.PLC is using RC232C for communication
with PC.
Using above software all functions of PLC can be created on same principle as a relay
diagram. A KV ladder diagram can be created on same principle as a relay diagram.
Basic Operations using Ladder builder for KV editor:-
The editor offers following functions:
Creates ladder diagram using diversified instructions of ladder diagram language.
Performs editing function.
Register comments to contact and transfer, the converted diagram to PLC.
The maximum number of times that can be edited to one ladder diagrams is KV is 9999.
Entering and Detecting Symbols and Connection Lines:-
A ladder symbol is automatically entered when an instruction word is specified on by
entering as ‘0’ contact or an ‘a’ contact or a ‘b’ contact or a coil in the current cursor
position.
The following keys are available in KV.
58
No contact input (F3)
Normally closed contact input (Shift + F3)
Coil (F4)
Normally closed contact coil (Shift + F4)
Additional symbols can be selected by pressing F2 key.
PROCEDURE:-
1. Switch on PC.
2. From KV ladder menu select ‘Edit’ option
3. In edit select ‘new ladder file’
4. In that type a file name with extension
5. Select KV-16 type of PLC.
6. Then in the editor screen, enter the program.
7. To compile and simulate the entered program, select F1
8. In that select, compile + simulated
9. To simulate the program give appropriate input and observe the result
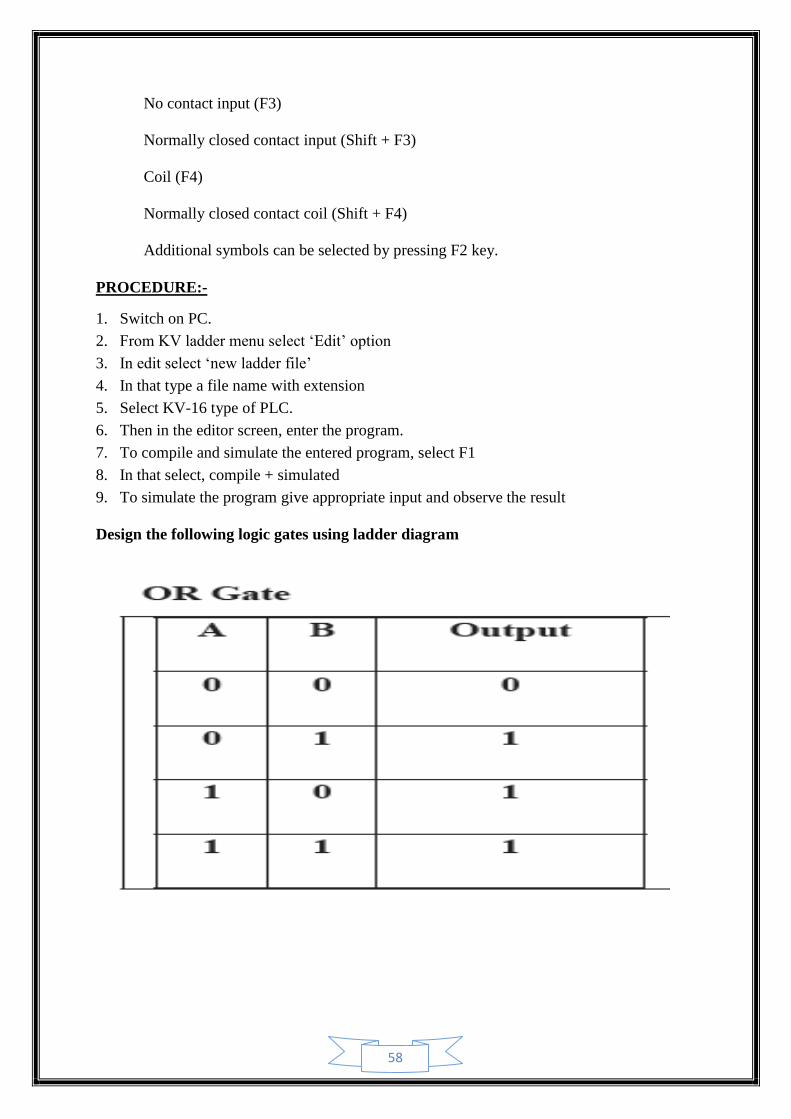
Design the following logic gates using ladder diagram
59
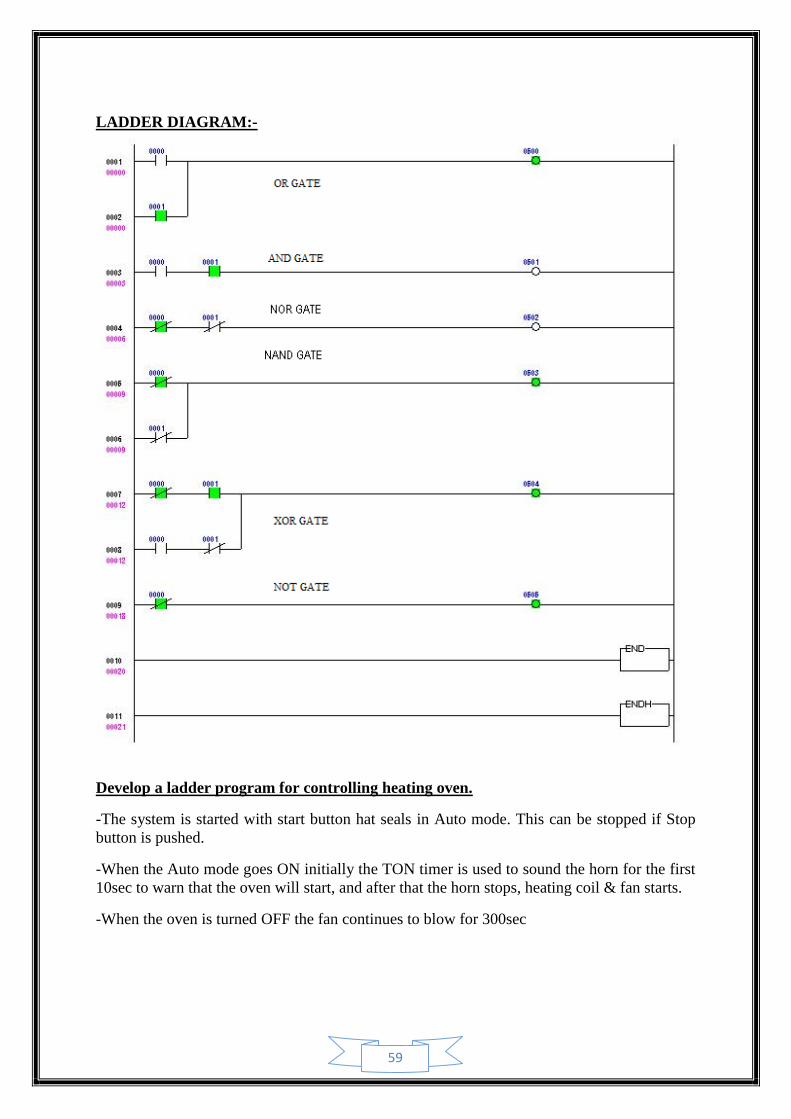
LADDER DIAGRAM:-
Develop a ladder program for controlling heating oven.
-The system is started with start button hat seals in Auto mode. This can be stopped if Stop
button is pushed.
-When the Auto mode goes ON initially the TON timer is used to sound the horn for the first
10sec to warn that the oven will start, and after that the horn stops, heating coil & fan starts.
-When the oven is turned OFF the fan continues to blow for 300sec
60
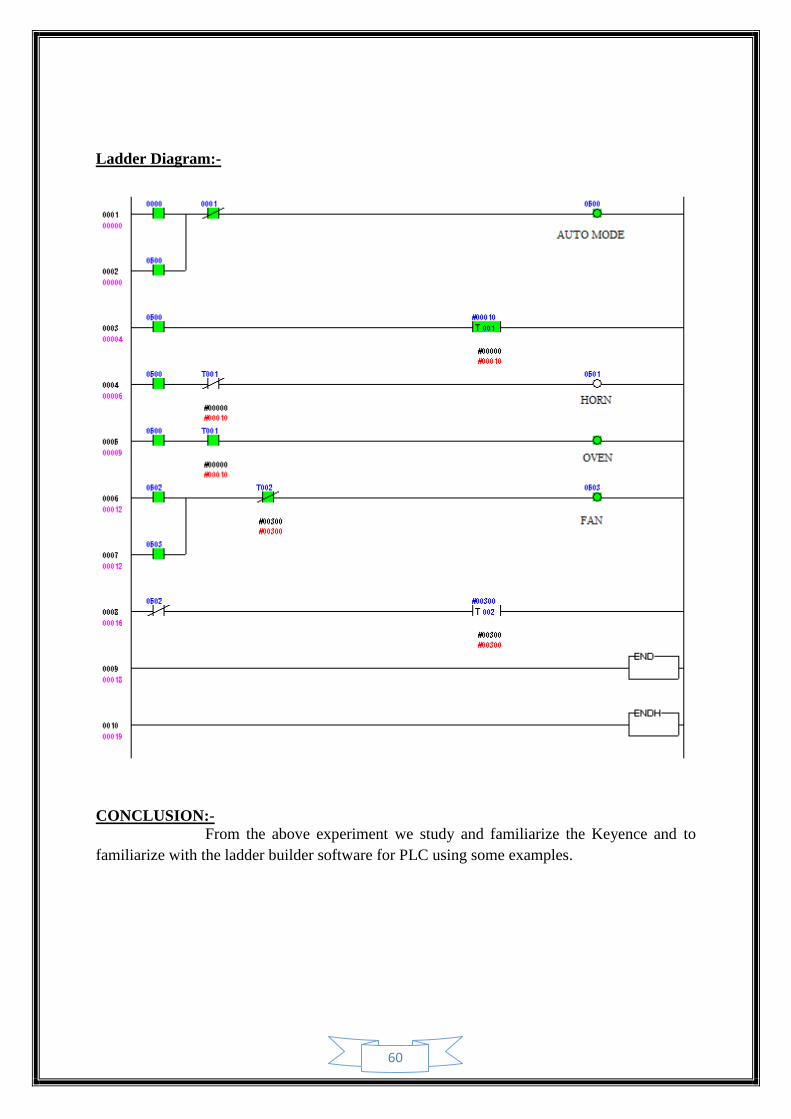
Ladder Diagram:-
CONCLUSION:-
From the above experiment we study and familiarize the Keyence and to
familiarize with the ladder builder software for PLC using some examples.
61
EXPERIMENT-10
AIM OF THE EXPERIMENT:-
To study and familiarize the Pico soft and to familiarize with the ladder builder software for
PLC using some examples.
PROCEDURE:-
1) Open the Pico soft software from the start menu.
2) Select a new file.
3) Go to any block and press enter. A window will pop up. Select input, output and timer
clicking on I, O and T respectively and also choose the members for naming the inputs and
outputs.
4) Using this method, implement the ladder logic for the given problem and save the file.
5) Compile and Run the program.
6) An input and output window will pop up. Now change the inputs as required to see the
desired output.
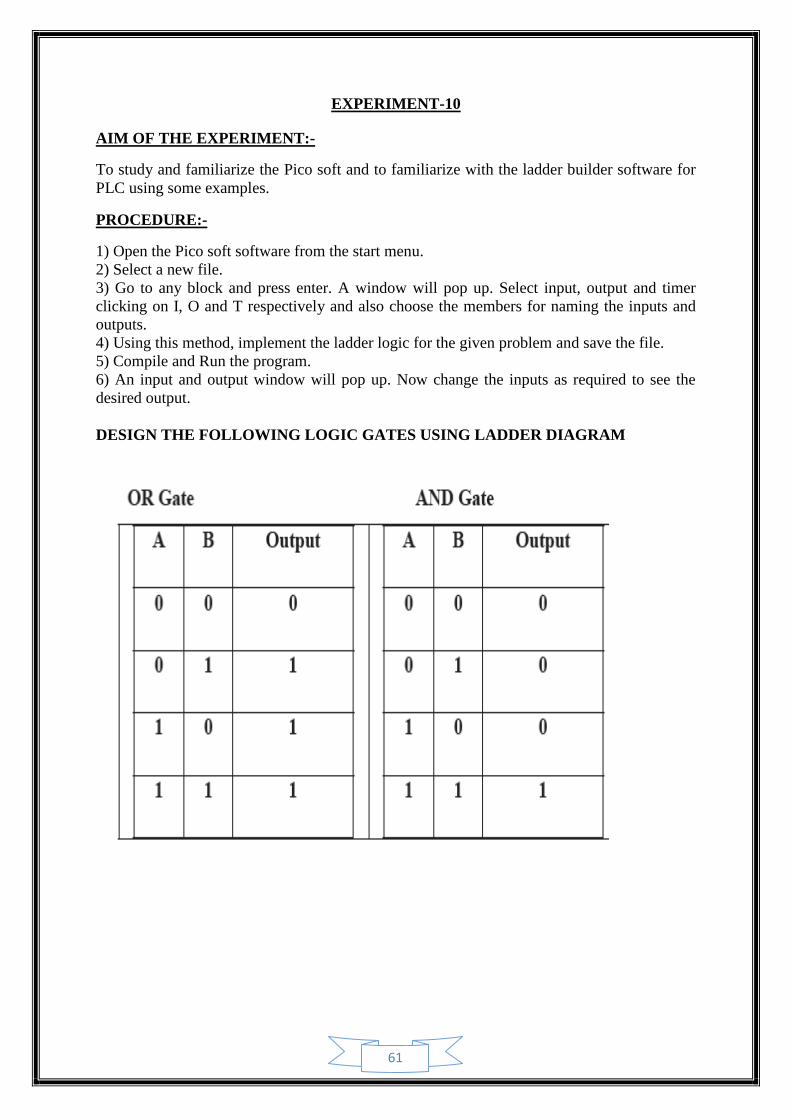
DESIGN THE FOLLOWING LOGIC GATES USING LADDER DIAGRAM
62
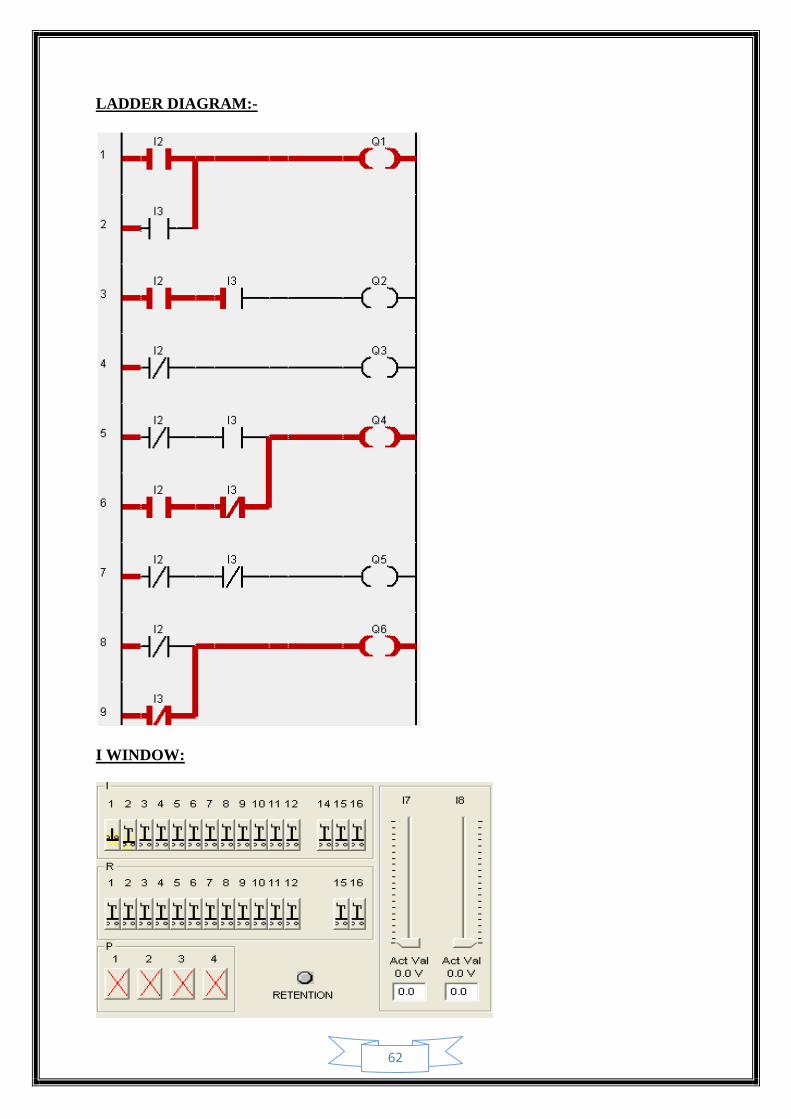
LADDER DIAGRAM:-
I WINDOW:
63
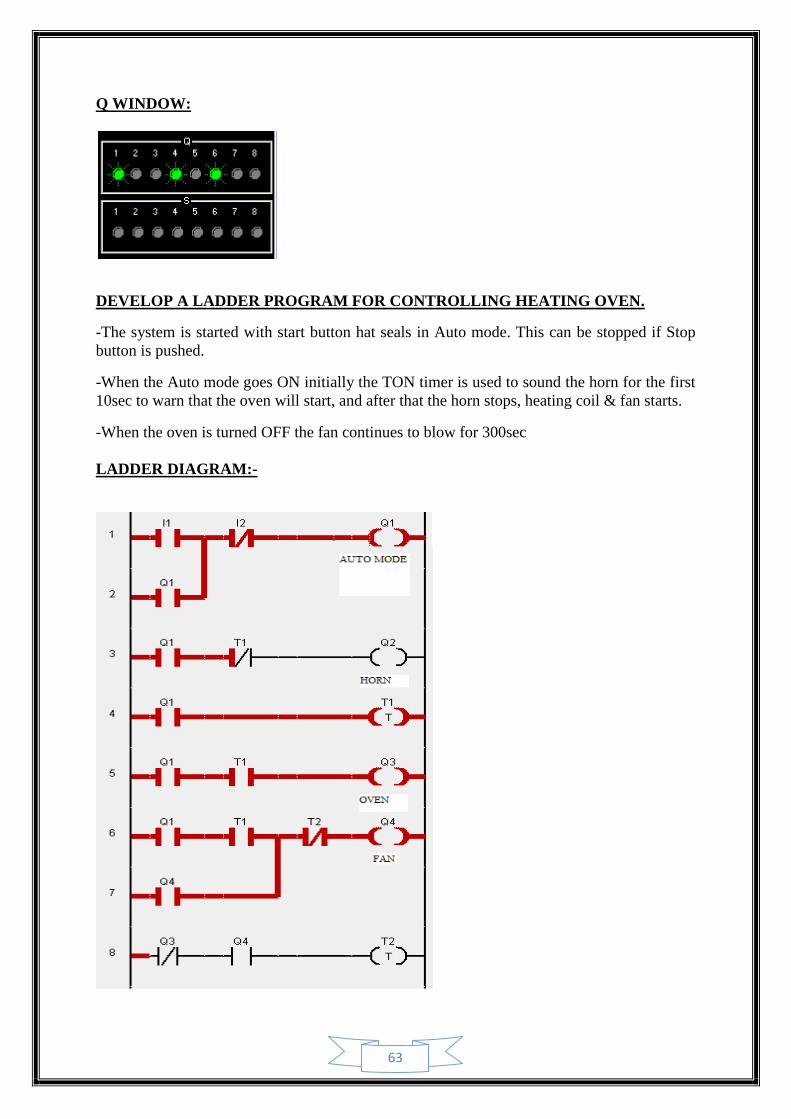
Q WINDOW:
DEVELOP A LADDER PROGRAM FOR CONTROLLING HEATING OVEN.
-The system is started with start button hat seals in Auto mode. This can be stopped if Stop
button is pushed.
-When the Auto mode goes ON initially the TON timer is used to sound the horn for the first
10sec to warn that the oven will start, and after that the horn stops, heating coil & fan starts.
-When the oven is turned OFF the fan continues to blow for 300sec
LADDER DIAGRAM:-
64
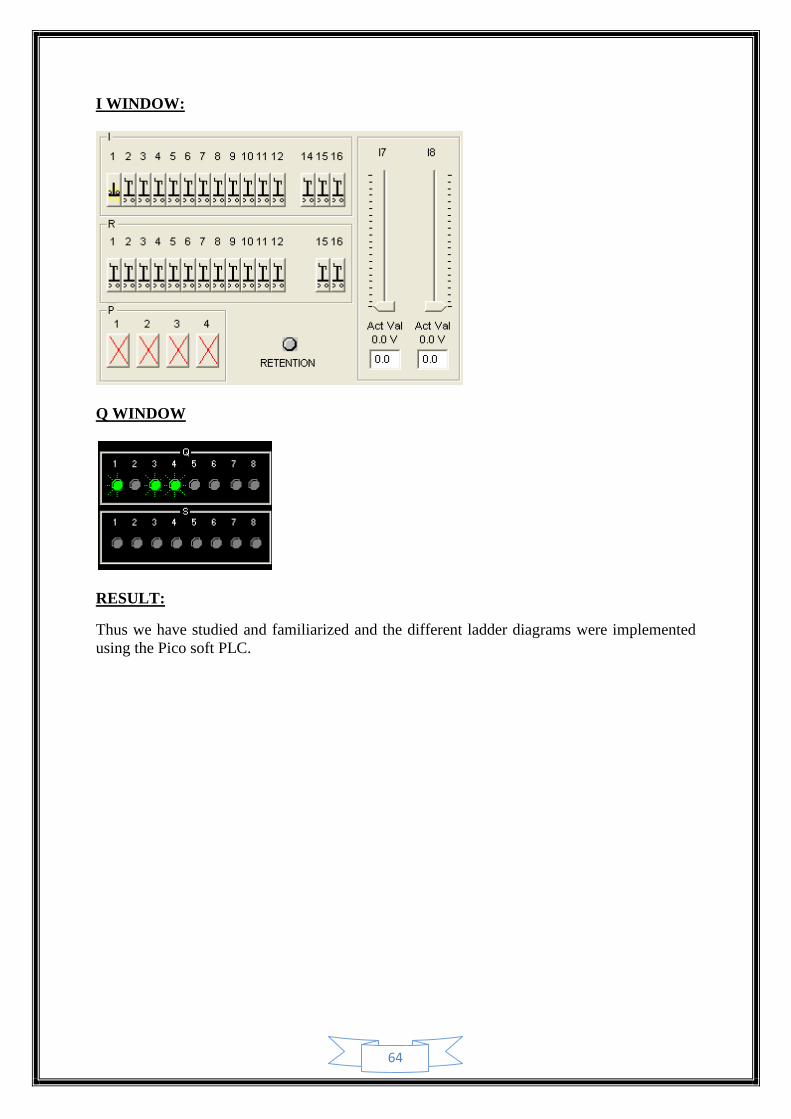
I WINDOW:
Q WINDOW
RESULT:
Thus we have studied and familiarized and the different ladder diagrams were implemented
using the Pico soft PLC.
65
EXPERIMENT-11
AIMOF THE EXPERIMENT:
To study the V-I characteristics of TRIAC by using PECI16MIA
APPARATUS REQUIRED:
5. PECI16MIA Trainer.
6. Ammeter (0-200mA) MC-2nos.
7. Voltmeter (0-30v) MC.
8. Patch chords
THEORY:
A TRIAC, or triode for alternating current is an electronic component approximately
equivalent to two silicon-controlled rectifiers (SCRs/thyristors) joined in inverse parallel
(paralleled but with the polarity reversed) and with their gates connected together. formal
name for a TRIAC is bidirectional triode thyristors .this results in a bidirectional electronic
switch which can conduct current in either direction when it is trigged (turned on).it can be
triggered by either a positive or negative voltage being applied to its gate electrode (with
respect to AI, otherwise known as MTI).once triggered, the device continues to conduct until
the current through it drops below a certain threshold value, such as at the end of a half-cycle
of alternating current(AC) mains power. This makes the TRIAC a very convenient switch
for AC circuits, allowing the control of very large power flows with milli ampere-scale
control currents.in addition, applying a trigger pulse at a controllable point in AC cycle
allows one to control the percentage of current that flows through the TRIAC to the load(so-
called phase control).
Low power TRIACs are used in many applications such as light dimmers, speed controls for
electric fans
And other electric motors, and in the modern computerized control circuit of many house
hold small and major appliances. However, when used with inductive loads such as electric
fans , care must be taken to assure that the TRIACs will turn off correctly at the end of each
half cycle of the ac power.
66
67
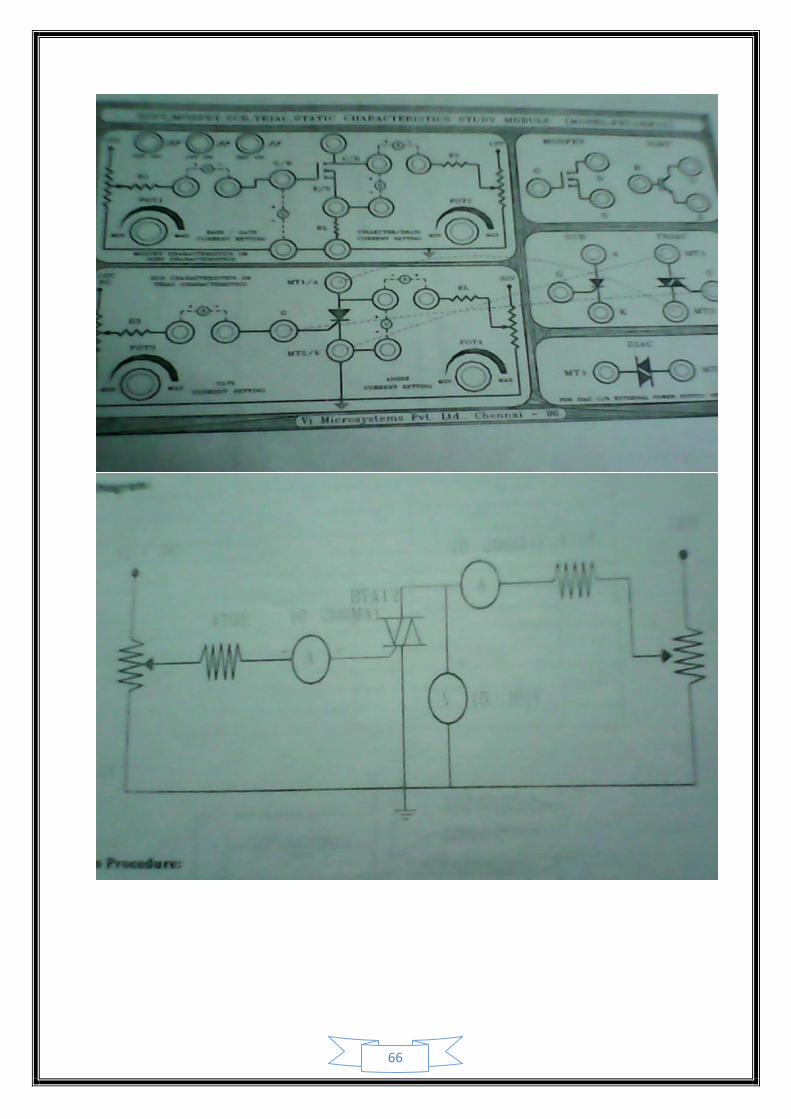
CONNECTION PROCEDURE:
Connect the MT2 terminal of TRIAC is positive with respective to MT1 and gate
current also positive.
Connect the ammeter in anode terminal as indicated in the connection diagram.
Connect the ammeter in gate terminal as indicated in the connection diagram.
Connect the voltmeter in between TRIAC MT1 and MT2.
EXPERIMENTAL PROCEDURE:
1. Now switch on the 230 volt Ac supply.
2. Now vary the pot 3 and set the gate current IG.
3. Now slowly increase theMT1 and MT2 voltage by varying the pot 4 till the
TRIAC is turned on and note the voltage(VMT1),current (IF) readings as
shown in the table.
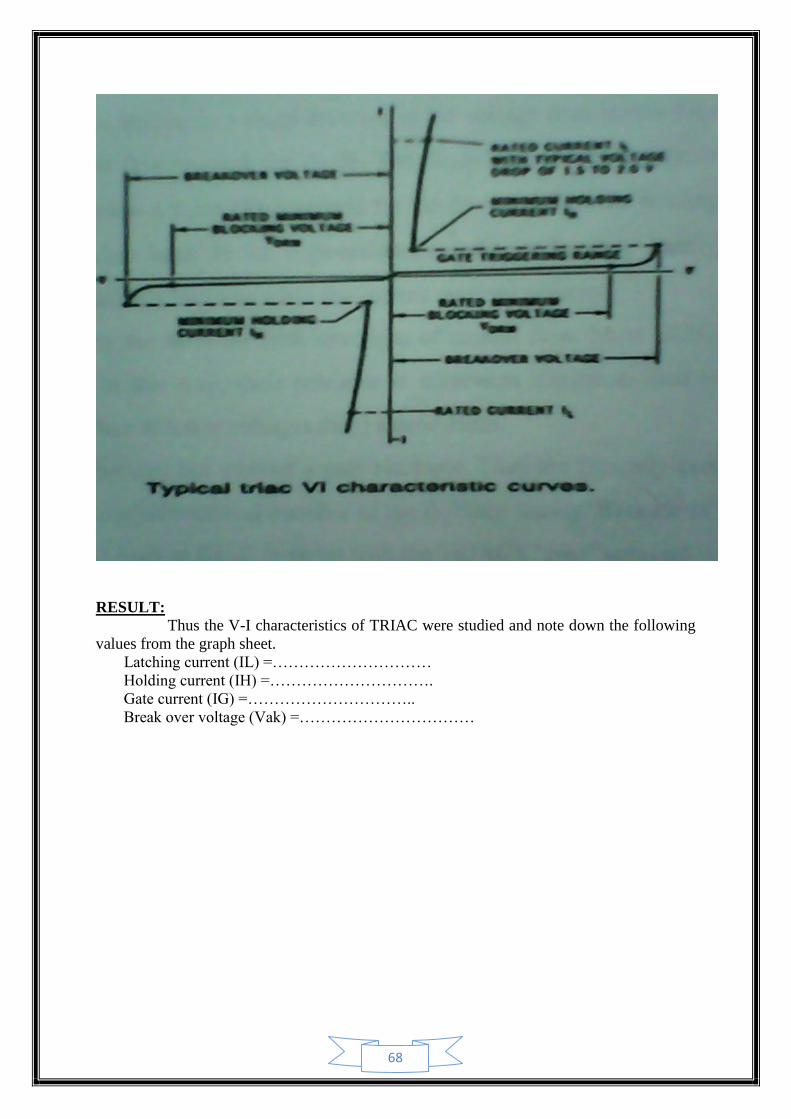
4. Now measure the break over voltage VB01.
5. Further increase the MT1-MT2 voltage and note the current IA.
6. Plot the Vf Vs If in a graph sheet.
TABULATION:
IG
=4.5MA(F.B)
IG =4.5MA(R.B)
SL NO VmT1 IA VmT1 If
1 3.3 0.3 -2.2 -2.0
2 3.5 0.4 -2.3 -1.9
3 4.4 0.5 -2.4 -1.7
4 5.3 0.6 -2.5 -1.6
5 5.8 0.6 -2.6 -1.5
6 6.8 0.7 -2.7 -1.4
7 7.7 0.8 -2.8 -1.3
8 8.7 0.9 -2.9 -1.1
9 9.1 0.9 -3.0 -1.0
10 9.9 1.0 -3.1 -0.92
68
RESULT:
Thus the V-I characteristics of TRIAC were studied and note down the following
values from the graph sheet.
Latching current (IL) =…………………………
Holding current (IH) =………………………….
Gate current (IG) =…………………………..
Break over voltage (Vak) =……………………………
69
EXPERIMENT-12
AIM OF THE EXPERIMENT:
To study the v-i characteristics of SCR using PEC16MIA.
APPARATUS REQUIRED:
1. PEC16MIA trainer.
2. Ammeter (0-200mA)-2 nos.
3. Voltmeter (0-30v) mc.
4. Patch chords.
THEORY:
An SCR is a type of rectifier, controlled by a logic gate signal.it is four-layer, three-terminal
device.
A p-type layer acts as an anode and an n-type layer as a cathode, the p-type layer closer to the
n-type(cathode) acts as a gate.
In the normal “off” state, the device restricts current to the leakage current. When the gate to
cathode voltage exceeds a certain threshold, the device turns “on” and conducts current. The
device will remain in the “on” state even after gate current is removed so long as current
through the device remains above the holding current. Once current falls below the holding
current for an appropriate period of time, the device will switch “OFF”.
If the applied voltage increases rapidly enough, capactive coupling may induce enough
charge into the gate to trigger the device into “ON” state; this is referred to as “dv/dt
triggering”. This is usually prevented by limiting the rate of voltage rise across the device,
perhaps by using a snubber .”dv/dt triggering’ may not switch the SCR into full conduction
rapidly and the partially-triggered SCR may dissipate more power than is usual, possibly
harming the device.
SCR can also be triggered by increasing the forward voltage beyond their rated breakdown
voltage (also called as break over voltage), but again, this does not rapidly switch the entire
device into conduction and so may be harmful so this mode of operation is also usually
avoided. Also, the actual breakdown voltage may be substantially higher then the rated
breakdown voltage, so the exact trigger point will vary from device to device.
70
SCR s are made with voltage ratings of up to 7500 volts, and with current ratings up to 3000
RMS amperes per device. Some of the larger ones can take over 50Ka in single-pulse
operation. SCRs are used in power switching, phase control, chopper, battery chargers, and
inverter circuits. Industrially they are applied to produce variable dc voltages for motors
(from a few several thousand HP) from AC line voltage. they control the bulk of diameters
used in stage lighting, and can also be used in some electric vehicles to modulate the working
voltage in a Jacobson circuit .another common application is phase cont1rol circuit used with
inductive loads .SCRS can also be found in welding power supplies where they are used to
maintain a constant output current or voltage. Large silicon-controlled rectifier assemblies
with many individual devices connected in series are used in high-voltage DC converter
stations.
Two SCRS in “inverse parallel” are often used in place of a TRIAC for switching
inductive loads on AC circuits. Because each SCR only conducts for half of the power
cycle and is reverse-biased for the other half-cycle ,turn-off of the SCR is assured.by
comparison ,the TRIAC is capable of conducting current in both directions and assuring
that it switches “off” during the brief zero-crossing of current can be difficult.
Typical electrostatic discharge(ESD) protection structures in integrated circuits produce a
parasitic SCR. this SCR is un desired ; if by accident it is triggered, then the IC will go
into latch up and may be destroyed.
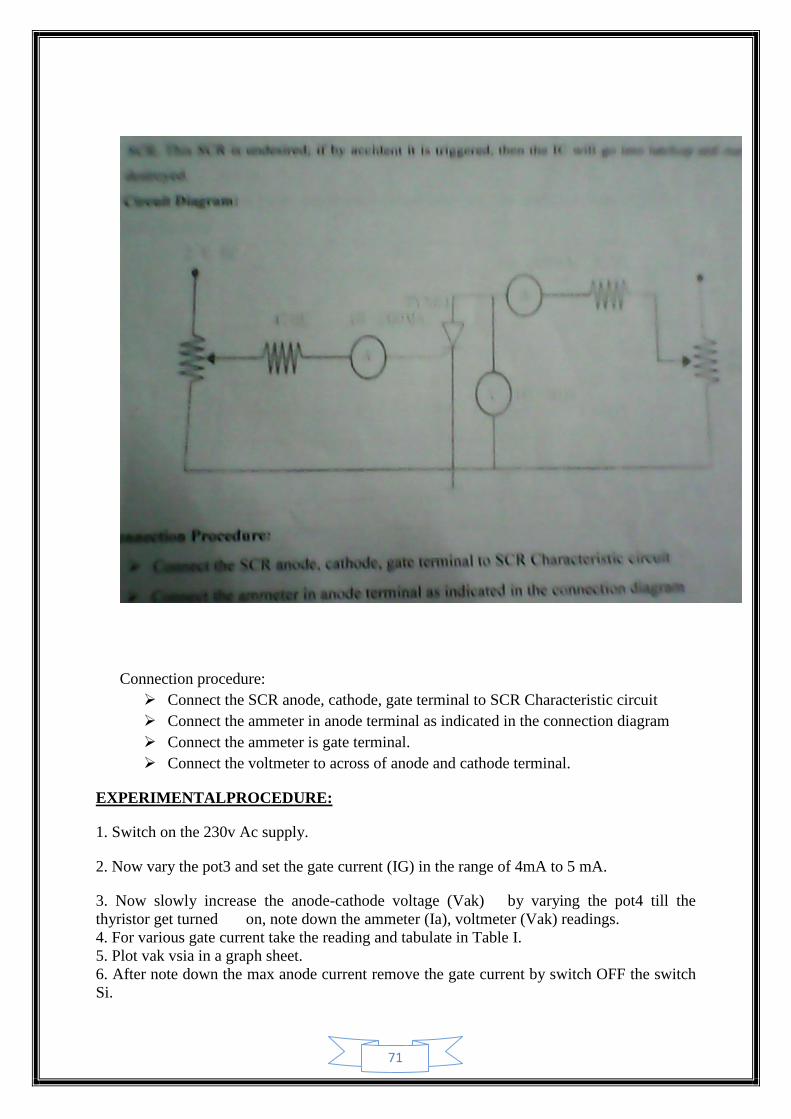
Circuit diagram:
71
Connection procedure:
Connect the SCR anode, cathode, gate terminal to SCR Characteristic circuit
Connect the ammeter in anode terminal as indicated in the connection diagram
Connect the ammeter is gate terminal.
Connect the voltmeter to across of anode and cathode terminal.
EXPERIMENTALPROCEDURE:
1. Switch on the 230v Ac supply.
2. Now vary the pot3 and set the gate current (IG) in the range of 4mA to 5 mA.
3. Now slowly increase the anode-cathode voltage (Vak) by varying the pot4 till the
thyristor get turned on, note down the ammeter (Ia), voltmeter (Vak) readings.
4. For various gate current take the reading and tabulate in Table I.
5. Plot vak vsia in a graph sheet.
6. After note down the max anode current remove the gate current by switch OFF the switch
Si.
72
7. Now reduce the anode voltage (Vak) gradually, at on stage the node current will suddenly
reach zero value. The current at this stage is holding current (IH).
8. Now switch ON the switch s1 and vary the anode cathode voltage (Vak) slightly, now
again switch OFF the switch s1
If the anode current show zero value again switch ON s1 and vary the anode
cathode voltage.
It the anode current shows some value, i.e. the latching current of scr.
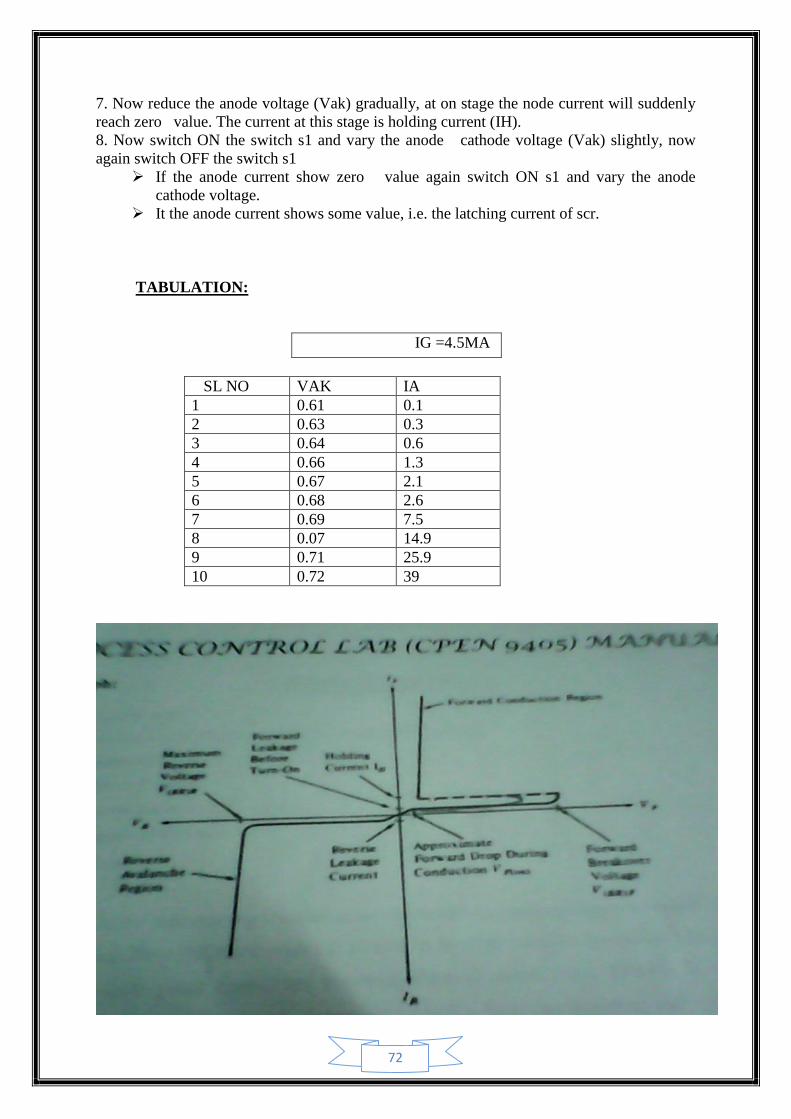
TABULATION:
IG =4.5MA
SL NO VAK IA
1 0.61 0.1
2 0.63 0.3
3 0.64 0.6
4 0.66 1.3
5 0.67 2.1
6 0.68 2.6
7 0.69 7.5
8 0.07 14.9
9 0.71 25.9
10 0.72 39
73
RESULT:
Thus the V-I characteristic of SCR were drawn and note the following values from the graph
sheet.
1. Latching current (IL) =----------------------.
2. Holding current (Ih) =----------------------.
3. Gate current (Ig) =--------------------------.
4. Break over voltage (Vak) =----------------.





























