Embed Size (px)
Citation preview

UGR AeroSpace Program
Learning Engineering through Simulated
Space Missions
@ugrspace

La inspiración: “Dare mighty things”
• https://www.youtube.com/watch?v=h2I8AoB1xgU
También queremos lograr ésto
• https://www.youtube.com/watch?v=yIUQ3MZ8yMs#t=163

Ejemplos a seguir
• Los grandes…
• Pero también los pequeños
PicoRover CubeSat

Copenhagen Suborbitals
• Y otros… (Dragon, Virgin Galactic…)

Tenemos experiencia
• Luchas de robots (Christian Morillas, Fco. Pelayo)
• Robots para la exposición “Objetivo Marte”

Black QuadCopter by Rodrigo Agís (v1 a v3)
• Diseñado y construido por Rodrigo Agis, [email protected],
• http://cic.ugr.es/servicios-y-unidades/ficha.php?codServicio=1001&unidad=81

El UAV en cifras• Peso: aprox. 10.5kg (ver. 1.0)
• Consumo: ¼ litro de Keroseno por minuto (a máxima potencia a 130000 RPM) y 150W de electricidad por motor
• Empuje total aproximado 19Kp, relación empuje/peso= 1.72Kp/k
• Tiempo de vuelo (ver 1.0) entre 20 y 25 minutos con 2 litros de keroseno
• Precio: financiación particular, “mucho más que una matrícula de curso completo” :D

Objetivo

Nuestro “asteroide”
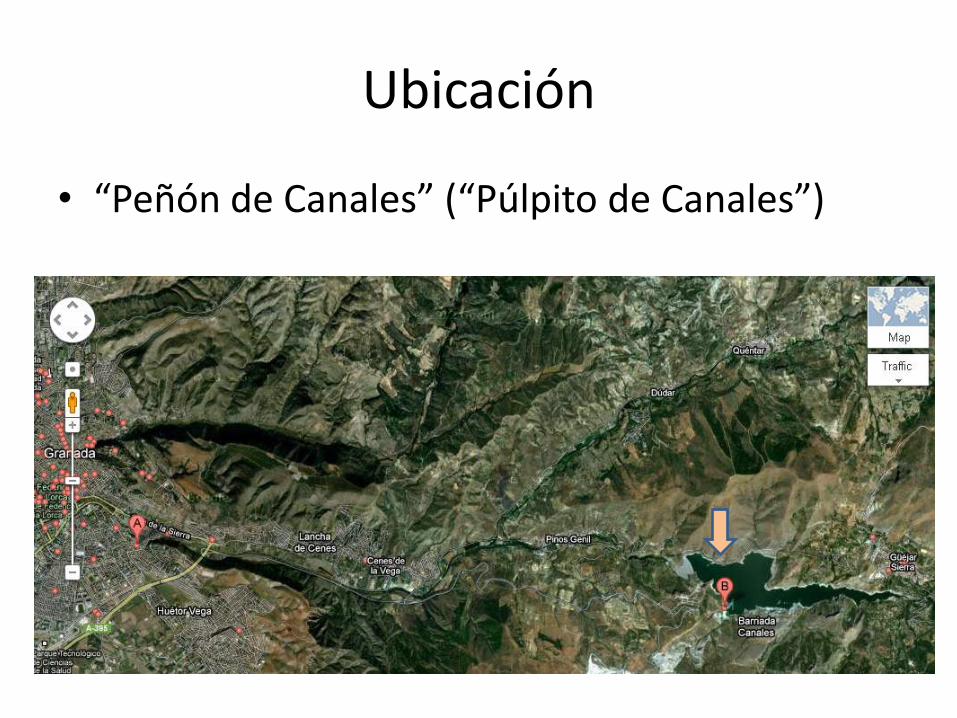
Ubicación
• “Peñón de Canales” (“Púlpito de Canales”)

Ubicación
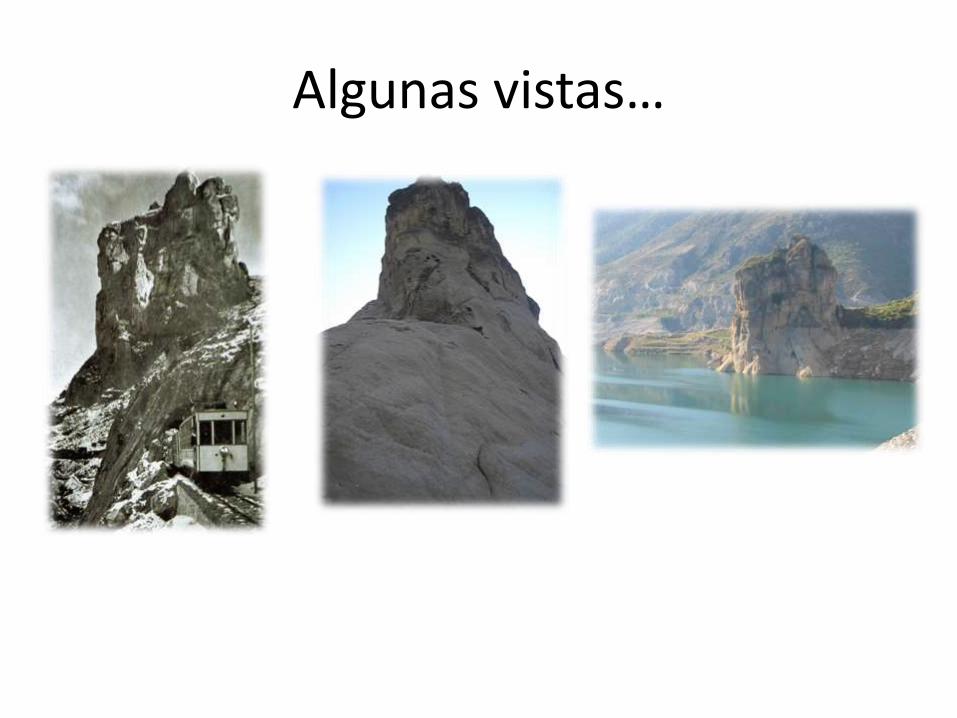
Algunas vistas…



Un tanto inaccesible
Misiones
• 1: Vehículo para misión de observación– Crear un mapa 3D para escoger lugares de aterrizaje y
rutas para el rover
• 2: Desarrollar un vehículo volador capaz de posar una sonda estática para medir las condiciones ambientales y tomar imágenes
• 3: Crear un rover capaz de moverse en una superficie muy inclinada, con vegetación, rocas, pendientes y acantilados
• 4: Misión avanzada: Desarrollo de un vehículo capaz de recoger al rover y devolverlo a casa (con muestras?)
• Monitorización remota (desde la ETSIIT)
Vehículos aéreos
• UAVs probablemente basados en cuadricópteros y/o dirigibles
• Retos:– Autonomía (baterías, células solares…)
– Precisión (basada en visión + GPS¿?)
– Capaz de llevar carga (rover)
• Inicialmente, lanzamiento desde cerca de la roca
• Bonus extra: lanzar desde la ETSIIT
El rover
• Terreno difícil: ¿ruedas? ¿patas?.
• Retos:
– Locomoción
– Autonomía (células solares): supervivencia
– Condiciones atmosféricas (nieve, lluvia, temperatura, …)
– Instrumentos científicos: cámaras, termómetro, etc.
• En cualquier caso: el presupuesto es el gran reto…

Más programas
• “StratoGlider”
• Incluso estudiantes de secundaria lanzan globos estratosféricos (> 30 Km)

Stratoglider
• Un paso más: hacer que retorne al punto de lanzamiento
• “Lifting body”, sin motores (GPS + Alerones)

Neptune
• Rovers subacuáticos
– Exploración subacuática (Canales, Cubillas)
– Reto de autonomía

Water Rockets

Muchas pruebas…
Departamentos/Laboratorios
• Departamentos/Laboratorios (inscribirse en uno):– Administración/dirección de programas– Comunicación (web, redes soc., prensa, foto/video, logos, relac.
comerciales)– Calidad y Seguridad– Sistemas (plataformas y apoyo)– Visualización y realismo (montajes 3D)– Energía y propulsión– Mecánica y fabricación– Navegación y control– Sensores/carga científica– Telemetría/telecom– Control de la Misión (SCADA) – segmento terreno– Computación de abordo (plataformas y soft de vuelo)
Y por participar… ¿qué?
• Certificado de actividades y participación
• Créditos (en trámite)
• PFC/TFG/TFM
• Experiencia
• Habilidades

Actividades comunes
• Seminarios globales / depto.– Misiones espaciales– Tutoriales temáticos (ej.: placas solares, navegación
inercial…)– Reports/demos de laboratorio
• Visitas (IAA, INTA)• Charlas (IAA, INTA)• Periodicidad de reuniones (comunes 1-2 meses),
por lab cada semana o dos semanas• Plataforma: SWAD (Curso UGR AeroSpace)
buscar e inscribirse


Una reflexión

Want to join us?

Estamos en marcha








![[PPT]No Slide Title - Quartermaster Corps · Web viewTypes of Rations: Unitized Group Ration-A (UGR-A); UGR-Heat & Serve (UGR-H&S); Meal Ready to Eat (MRE); Commercial off-the- Shelf](https://img.pdfslide.us/doc/110x75/5ad11a0c7f8b9aff738b54c5/pptno-slide-title-quartermaster-viewtypes-of-rations-unitized-group-ration-a.jpg)





















