The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
Réf: Version: Date:
1/21
1INC 19: Session A1: Innovative Navigation Solutions 1. Chair: Terry Moore
Statistical Analysis of Android GNSS Raw Data Measurements in
an Urban Environment for Smartphone Collaborative Positioning Methods
T. Verheyde , A. Blais , C. Macabiau , F.X. Marmet Telecommunication Research Laboratory– TéSA, Toulouse, France.
École Nationale Aviation Civile (ENAC) - Université de Toulouse, FranceCentre National d’Etudes Spatiales (CNES) – Toulouse, France
[thomas.verheyde],[blais],[macabiau]@recherche.enac.fr [email protected]
[1,2] [2] [2] [3]
[3]
[2]
[1]
1
2.0 Tuesday 21th November Authors: [1] Thomas VERHEYDE , [2] Antoine BLAIS, [2] Christophe Macabiau, [3] François-Xavier MARMET 22

The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
Réf: Version: Date:
2/21
The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
2
I. Introductiona. Contextb. Motivationsc. Objectives
II. Methodologya. Experimentation Protocolb. Clock Drift Estimationc. DLL Jitter Estimation d. PLL & Doppler Jitter Estimation
III. Results Analysis
IV. Conclusions
OUTLINE
2
22

The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
Réf: Version: Date:
3/21
The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
3
I. Introductiona. Contextb. Motivationsc. Objectives
II. Methodologya. Experimentation Protocolb. Clock Drift Estimationc. DLL Jitter Estimation d. PLL & Doppler Jitter Estimation
III. Results Analysis
IV. Conclusions
OUTLINE
3
22

The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
Réf: Version: Date:
4/21
4INC 19: Session A1: Innovative Navigation Solutions 1. Chair: Terry Moore
4
I) Introduction - Context
• In May 2016, Google announced that GNSS raw data measurements will be available on Android smartphones via their latest API Android 7.0.
For the first time, developers and the scientific community will haveaccess to GNSS measurements from the smartphone integrated receiver.
Derived GNSS Measurementsobtained via Android
- Code measurements- Phase measurements- Doppler measurements- SNR measurements- Automatic Gain Control- and more …
Multiconstellation & Multifrequency
• A potential access to billions of GNSS smartphones data, leading to the use of advanced crowdsourcing GNSS processing techniques motivated my PhD thesis:
Precise Cooperative Positioning of Low-Cost Mobiles in an Urban Environment
2.0 Tuesday 21th November Authors: [1] Thomas VERHEYDE , [2] Antoine BLAIS, [2] Christophe Macabiau, [3] François-Xavier MARMET 22

The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
Réf: Version: Date:
5/21
5INC 19: Session A1: Innovative Navigation Solutions 1. Chair: Terry Moore
5
I) Introduction - Motivations
Android GNSS Raw Data Measurements Overview
Advantages Drawbacks
• Easy to record (GNSSLogger.apk or Geo++RinexLogger.apk)
• Support technological innovation
• Low-cost receiver
• Detailed documentation
• Analysis of the smartphone embedded GNSS algorithm
• Poor quality antenna
• Duty cycle
• Variety of smartphones models and brands
• Information on receiver architecture & tracking loop parameters are unknown
2.0 Tuesday 21th November Authors: [1] Thomas VERHEYDE , [2] Antoine BLAIS, [2] Christophe Macabiau, [3] François-Xavier MARMET 22

The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
Réf: Version: Date:
6/21
6INC 19: Session A1: Innovative Navigation Solutions 1. Chair: Terry Moore
6
I) Introduction - Motivations
[2] Gioia, Ciro & Damy, Sophie & Borio, Daniele. (2019). Precise Time in your Pocket: Timing Performance of Android Phones. 137-148. 10.33012/2019.16749.
[1] Lehtola, V. V., Söderholm, S., Koivisto, M., & Montloin, L. (2019). Exploring GNSS crowdsourcing feasibility: Combinations of measurements for modeling smartphone and higher end GNSS receiver performance. Sensors (Switzerland), 19(13), 1-17. [3018]. https://doi.org/10.3390/s19133018
[3] Lachapelle, Gérard & Gratton, Paul & Horrelt, Jamie & Lemieux, Erica & Broumandan, Ali. (2018). Evaluation of a Low Cost Hand Held Unit with GNSS Raw Data Capability and Comparison with an Android Smartphone. Sensors. 18. 4185. 10.3390/s18124185.
I. Exploring the feasibility of smartphone collaborative positioning [4]
II. How does a smartphone perform compared to a low-cost GNSS receiver in an urban environment. [2][3]
III. Smartphone GNSS chipset receiver architecture & tracking loop parameters are unknown [1]
[4] Garello, Roberto & Samson, Jaron & Spirito, Maurizio & Wymeersch, Henk. (2012). Peer-to-Peer Cooperative Positioning: Part II: Hybrid Devices with GNSS & Terrestrial Ranging Capability. Inside GNSS.
2.0 Tuesday 21th November Authors: [1] Thomas VERHEYDE , [2] Antoine BLAIS, [2] Christophe Macabiau, [3] François-Xavier MARMET 22

The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
Réf: Version: Date:
7/21
7INC 19: Session A1: Innovative Navigation Solutions 1. Chair: Terry Moore
7
I) Introduction - Objectives
In order to explore the feasibility of smartphone collaborative positioning, accurate and realistic simulations must be developed. Classic error models may not apply, embedded smartphone receivers need to be treated as a black box receiver.
Existing error models will be derived from real measurements processing.
• Characterizing smartphones GNSS receiver’s main parameters:
- Phase jitter (σ𝑷𝑳𝑳)- Code jitter (σ𝑫𝑳𝑳 )- Doppler jitter (σ𝑫𝒐𝒑𝒑𝒍𝒆𝒓)
- Clock drift (𝒄 ሶ𝜹𝒕)
• Find a possible correlation between those parameters and phone brands/models or GNSS embedded chipset brands/models.
2.0 Tuesday 21th November Authors: [1] Thomas VERHEYDE , [2] Antoine BLAIS, [2] Christophe Macabiau, [3] François-Xavier MARMET 22

The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
Réf: Version: Date:
8/21
The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
8
I. Introductiona. Contextb. Motivationsc. Objectives
II. Methodologya. Experimentation Protocolb. Clock Drift Estimationc. DLL Jitter Estimation d. PLL & Doppler Jitter Estimation
III. Results Analysis
IV. Conclusions
OUTLINE
8
22

The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
Réf: Version: Date:
9/21
9INC 19: Session A1: Innovative Navigation Solutions 1. Chair: Terry Moore
II) Methodology - Protocols
Qualcomm Snapdragon 845
HiSilicon Kirin 980
Qualcomm Snapdragon 855
Qualcomm Snapdragon 845
BroadcomBCM47755
HiSilicon Kirin 980
Multi-ConstellationSingle Frequency
Multi-ConstellationMulti-Frequency
Multi-ConstellationMulti-Frequency
Multi-ConstellationMulti-Frequency
Multi-ConstellationMulti-Frequency
Google Pixel 3
Honor View 20
Xiaomi Mi 9
Xiaomi Mi 8
HuaweiMate 20X
11/201806/201804/201901/201911/2019
SamsungS10+
03/2019
Qualcomm Snapdragon 855
Multi-ConstellationMulti-Frequency
x2 x39 tested smartphones
9
2.0 Tuesday 21th November Authors: [1] Thomas VERHEYDE , [2] Antoine BLAIS, [2] Christophe Macabiau, [3] François-Xavier MARMET 22

The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
Réf: Version: Date:
10/21
10INC 19: Session A1: Innovative Navigation Solutions 1. Chair: Terry Moore
II) Methodology - ProtocolsOn the roof On the roof
Google Pixel 3
Honor View 20
Xiaomi Mi 9
Geodetic GNSSAntenna
Honor View 20
Xiaomi Mi 8
HuaweiMate 20X
Inside the vehicle Inside the vehicle
Xiaomi Mi 8
OPEN
Geodetic GNSSAntenna
SBG Low-costIMU
Ublox F9Ublox F9
Ublox F9SPAN SPAN
ASTX_UGNSS Receiver
AsteRxGNSS Receiver
PolaRx5GNSS Receiver
10
2.0 Tuesday 21th November Authors: [1] Thomas VERHEYDE , [2] Antoine BLAIS, [2] Christophe Macabiau, [3] François-Xavier MARMET 22

The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
Réf: Version: Date:
11/21
11INC 19: Session A1: Innovative Navigation Solutions 1. Chair: Terry Moore
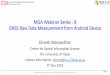
II) Methodology - Protocols
Data Collection Campaign
- Various collaborative scenarios between two vehicles
- Static scenarios for assessing nominal performance
- Total of collection time ≈ 10 hours
Mi 8Mi 9
View 20
Pixel 3
S10+
Data Collection Campaign Trajectory in Toulouse, FRANCE
Static Scenario (Open Sky Environment)
11
20cm
2.0 Tuesday 21th November Authors: [1] Thomas VERHEYDE , [2] Antoine BLAIS, [2] Christophe Macabiau, [3] François-Xavier MARMET 22
Rooftop Smartphones Configuration

The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
Réf: Version: Date:
12/21
12INC 19: Session A1: Innovative Navigation Solutions 1. Chair: Terry Moore
II) Methodology - Clock Drift Estimation
𝑑1𝑑2⋮𝑑𝑖
=
−𝑎𝑥1 −𝑎𝑦1 −𝑎𝑧1 1−𝑎𝑥2⋮
−𝑎𝑥𝑖
−𝑎𝑦2⋮
−𝑎𝑦𝑖
−𝑎𝑧2⋮
−𝑎𝑧𝑖
1⋮1
∙
𝑣𝑢𝑥𝑣𝑢𝑦𝑣𝑢𝑧𝑐 ሶ𝛿𝑡
+
휀 ሶ𝜌1휀 ሶ𝜌2
⋮휀 ሶ𝜌𝑖
ሶ𝜌𝑖𝑠𝑣 = 𝑣𝑥𝑖 ∙ 𝑎𝑥𝑖 + 𝑣𝑦𝑖 ∙ 𝑎𝑦𝑖 + 𝑣𝑧𝑖 ∙ 𝑎𝑧𝑖 + 𝑐 ሶ𝛿𝑡 + 휀 ሶ𝜌𝑖
𝑠
with ഥ𝑎𝑖 being the user-satellite line of sight vector
Solving this equation with a WLSE, we obtain 𝑐 ሶ𝛿𝑡.
Doppler measurement model:
Multiconstellation & Multifrequency
Hypothesis
12
Clock Drift for a Honor View 20
2.0 Tuesday 21th November Authors: [1] Thomas VERHEYDE , [2] Antoine BLAIS, [2] Christophe Macabiau, [3] François-Xavier MARMET 22
𝑑𝑖𝑠𝑣 = ሶ𝜌𝑖
𝑠𝑣 − 𝑣𝑖𝑠𝑣 ∗ 𝑎𝑖
𝑠𝑣
Setting that:
thus
𝑣𝑖𝑠𝑣 ∗ 𝑎𝑖
𝑠𝑣Predicted Radial Satellite Movement :
𝑐 ሶ𝛿𝑡 modeling : 𝑐 ሶ𝛿𝑡 = 𝑐 ሶ𝛿𝑡𝑓𝑎𝑠𝑡 + 𝑐 ሶ𝛿𝑡 𝑠𝑙𝑜𝑤
𝑐 ሶ𝛿𝑡𝑠𝑙𝑜𝑤 is modeled by a curve fitting
Static scenario : User position is computed by a reference receiver

The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
Réf: Version: Date:
13/21
13
𝜌𝑖𝑠𝑣 − 𝜑𝑖
𝑠𝑣 = 2휀𝐼𝑜𝑛𝑜 + 휀𝐶𝑜𝑑𝑒 − 휀𝑃ℎ𝑎𝑠𝑒 + ∆휀𝑀𝑢𝑙𝑡𝑖𝑝𝑎𝑡ℎ + ∆𝜑
INC 19: Session A1: Innovative Navigation Solutions 1. Chair: Terry Moore
II) Methodology – DLL Jitter Estimation
𝜌𝑖𝑠𝑣 = 𝑟 + 𝑐 𝑡𝑟𝑥 − 𝑡𝑡𝑥 + 휀𝐼𝑜𝑛𝑜 + 휀𝑇𝑟𝑜𝑝𝑜 + 휀𝐶𝑜𝑑𝑒 + 휀𝑀𝑢𝑙𝑡𝑖𝑝𝑎𝑡ℎ
𝜌
𝜑𝑖𝑠𝑣 = 𝑟 + 𝑐 𝑡𝑟𝑥 − 𝑡𝑡𝑥 − 휀𝐼𝑜𝑛𝑜 + 휀𝑇𝑟𝑜𝑝𝑜 + ∆𝜑 + 휀𝑃ℎ𝑎𝑠𝑒 + 휀𝑀𝑢𝑙𝑡𝑖𝑝𝑎𝑡ℎ
𝜑
Best available satellite signal
Code model :
Phase model :
Code minus carrier (CMC) model :
13Galileo – PRN 21 – E1
DLL Jitter for a Honor View 20
2.0 Tuesday 21th November Authors: [1] Thomas VERHEYDE , [2] Antoine BLAIS, [2] Christophe Macabiau, [3] François-Xavier MARMET 22
𝑑
𝑑𝑡( 𝜌𝑖
𝑠𝑣 − 𝜑𝑖𝑠𝑣 ) =
𝑑
𝑑𝑡(2휀𝐼𝑜𝑛𝑜 + 휀𝐶𝑜𝑑𝑒)
CMC Time differenced model :
Hypothesis
∆휀𝑀𝑢𝑙𝑡𝑖𝑝𝑎𝑡ℎ ≈ 0
휀𝐶𝑜𝑑𝑒 ≫ 휀𝑃ℎ𝑎𝑠𝑒
Open sky scenario :
Error model :
Ionospheric variation:𝑑
𝑑𝑡( 휀𝐼𝑜𝑛𝑜 ) ≈ 0
Cycle slip detection: Android flag detection

The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
Réf: Version: Date:
14/21
14INC 19: Session A1: Innovative Navigation Solutions 1. Chair: Terry Moore
II) Methodology – PLL/FLL Jitter Estimation
Best available satellite signal
14
𝜑𝑖𝑠𝑣 = 𝑟 + 𝑐 𝑡𝑟𝑥 − 𝑡𝑡𝑥 − 휀𝐼𝑜𝑛𝑜 + 휀𝑇𝑟𝑜𝑝𝑜 + ∆𝜑 + 휀𝑃ℎ𝑎𝑠𝑒 + 휀𝑀𝑢𝑙𝑡𝑖𝑝𝑎𝑡ℎ
𝜑Phase model :
2.0 Tuesday 21th November Authors: [1] Thomas VERHEYDE , [2] Antoine BLAIS, [2] Christophe Macabiau, [3] François-Xavier MARMET 22
Galileo – PRN 21 – E1a
Figure: PLL Jitter for a Honor View 20
Triple time differenced Phase model [5] :
𝑑3𝜑𝑖𝑠𝑣
𝑑𝑡3= ∆𝑡3(𝑟 + 𝑐 𝑡𝑟𝑥 − 𝑡𝑡𝑥 ) − ∆𝑡3(휀𝐼𝑜𝑛𝑜) + ∆𝑡3(휀𝑇𝑟𝑜𝑝𝑜) + ∆𝜑 + 휀𝑃ℎ𝑎𝑠𝑒 + ∆𝑡3(휀𝑀𝑢𝑙𝑡𝑖𝑝𝑎𝑡ℎ
𝜑)
Hypothesis
∆휀𝑀𝑢𝑙𝑡𝑖𝑝𝑎𝑡ℎ ≈ 0Open sky scenario:
Ionospheric variation:𝑑
𝑑𝑡( 휀𝐼𝑜𝑛𝑜 ) ≈ 0
Tropospheric variation:𝑑
𝑑𝑡( 휀𝑇𝑟𝑜𝑝𝑜 ) ≈ 0
Static scenario :
Cycle slip detection: Android flag detection
∆𝑡3 𝑟 + 𝑐 𝑡𝑟𝑥 − 𝑡𝑡𝑥 ≈ 0

The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
Réf: Version: Date:
15/21
The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
15
I. Introductiona. Contextb. Motivationsc. Objectives
II. Methodologya. Experimentation Protocolb. Clock Drift Estimationc. DLL Jitter Estimation d. PLL & Doppler Jitter Estimation
III. Results Analysis
IV. Conclusions
OUTLINE
22
15

The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
Réf: Version: Date:
16/21
16INC 19: Session A1: Innovative Navigation Solutions 1. Chair: Terry Moore
2.0 Tuesday 21th November Authors: [1] Thomas VERHEYDE , [2] Antoine BLAIS, [2] Christophe Macabiau, [3] François-Xavier MARMET
III) Results Analysis – 𝒄 ሶ𝜹𝒕
Receiver Septentrio PolaRX5S*
u-bloxM8T*
Samsung S8*
Google Pixel 3
Honor View 20
Xiaomi Mi 8
XiaomiMi 9
Samsung S10+
𝝈𝒄 ሶ𝜹𝒕 [𝒎/𝒔] < 0.03 0.14 0.18 4.72 0.61 0.16 3.93 0.44
2nd Phone
3rd Phone
* Results obtained by Lethova. et al [1]
16
22
0.25
0.26
0.42
Results obtained by Lethova. et al [1] Smartphones Tested

The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
Réf: Version: Date:
17/21
17INC 19: Session A1: Innovative Navigation Solutions 1. Chair: Terry Moore
2.0 Tuesday 21th November Authors: [1] Thomas VERHEYDE , [2] Antoine BLAIS, [2] Christophe Macabiau, [3] François-Xavier MARMET
III) Results Analysis – 𝒄 ሶ𝜹𝒕
Receiver Septentrio PolaRX5S*
u-bloxM8T*
Samsung S8*
Google Pixel 3
Honor View 20
Xiaomi Mi 8
XiaomiMi 9
Samsung S10+
𝝈𝒄 ሶ𝜹𝒕 [𝒎/𝒔] < 0.03 0.14 0.18 4.72 0.61 0.16 3.93 0.44
2nd Phone
3rd Phone
* Results obtained by Lethova. et al [1]
Qualcomm Snapdragon 845
HiSilicon Kirin 980
Qualcomm Snapdragon 855
BroadcomBCM47755
Qualcomm Snapdragon 855
Qualcomm Snapdragon 835
16
22
0.25
0.26
0.42

The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
Réf: Version: Date:
18/21
18INC 19: Session A1: Innovative Navigation Solutions 1. Chair: Terry Moore
2.0 Tuesday 21th November Authors: [1] Thomas VERHEYDE , [2] Antoine BLAIS, [2] Christophe Macabiau, [3] François-Xavier MARMET
III) Results Analysis – 𝒄 ሶ𝜹𝒕
Receiver Septentrio PolaRX5S*
u-bloxM8T*
Samsung S8*
Google Pixel 3
Honor View 20
Xiaomi Mi 8
XiaomiMi 9
Samsung S10+
𝝈𝒄 ሶ𝜹𝒕 [𝒎/𝒔] < 0.03 0.14 0.18 4.72 0.61 0.16 3.93 0.44
2nd Phone
3rd Phone
* Results obtained by Lethova. et al [1]
Qualcomm Snapdragon 845
HiSilicon Kirin 980
Qualcomm Snapdragon 855
BroadcomBCM47755
Qualcomm Snapdragon 855
Qualcomm Snapdragon 835
16
22
0.25
0.26
0.42

The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
Réf: Version: Date:
19/21
19INC 19: Session A1: Innovative Navigation Solutions 1. Chair: Terry Moore
2.0 Tuesday 21th November Authors: [1] Thomas VERHEYDE , [2] Antoine BLAIS, [2] Christophe Macabiau, [3] François-Xavier MARMET
III) Results Analysis – 𝒄 ሶ𝜹𝒕
Receiver Septentrio PolaRX5S*
u-bloxM8T*
Samsung S8*
Google Pixel 3
Honor View 20
Xiaomi Mi 8
XiaomiMi 9
Samsung S10+
𝝈𝒄 ሶ𝜹𝒕 [𝒎/𝒔] < 0.03 0.14 0.18 4.72 0.61 0.16 3.93 0.44
2nd Phone
3rd Phone
* Results obtained by Lethova. et al [1]
Qualcomm Snapdragon 845
HiSilicon Kirin 980
Qualcomm Snapdragon 855
BroadcomBCM47755
Qualcomm Snapdragon 855
Qualcomm Snapdragon 835
16
22
0.25
0.26
0.42

The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
Réf: Version: Date:
20/21
20INC 19: Session A1: Innovative Navigation Solutions 1. Chair: Terry Moore
2.0 Tuesday 21th November Authors: [1] Thomas VERHEYDE , [2] Antoine BLAIS, [2] Christophe Macabiau, [3] François-Xavier MARMET
III) Results Analysis – 𝒄 ሶ𝜹𝒕
Receiver Septentrio PolaRX5S*
u-bloxM8T*
Samsung S8*
Google Pixel 3
Honor View 20
Xiaomi Mi 8
XiaomiMi 9
Samsung S10+
𝝈𝒄 ሶ𝜹𝒕 [𝒎/𝒔] < 0.03 0.14 0.18 4.72 0.61 0.16 3.93 0.44
2nd Phone
3rd Phone
* Results obtained by Lethova. et al [1]
Qualcomm Snapdragon 845
HiSilicon Kirin 980
Qualcomm Snapdragon 855
BroadcomBCM47755
Qualcomm Snapdragon 855
Qualcomm Snapdragon 835
16
22
0.25
0.26
0.42
Comparing phones with no phase measurements

The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
Réf: Version: Date:
21/21
21INC 19: Session A1: Innovative Navigation Solutions 1. Chair: Terry Moore
2.0 Tuesday 21th November Authors: [1] Thomas VERHEYDE , [2] Antoine BLAIS, [2] Christophe Macabiau, [3] François-Xavier MARMET
III) Results Analysis – 𝒄 ሶ𝜹𝒕
Receiver Septentrio PolaRX5S*
u-bloxM8T*
Samsung S8*
Google Pixel 3
Honor View 20
Xiaomi Mi 8
XiaomiMi 9
Samsung S10+
𝝈𝒄 ሶ𝜹𝒕 [𝒎/𝒔] < 0.03 0.14 0.18 4.72 0.61 0.16 3.93 0.44
2nd Phone
3rd Phone
* Results obtained by Lethova. et al [1]
Qualcomm Snapdragon 845
HiSilicon Kirin 980
Qualcomm Snapdragon 855
BroadcomBCM47755
Qualcomm Snapdragon 855
Qualcomm Snapdragon 835
16
22
0.25
0.26
0.42
Comparing phones’ performance to commercial GNSS receivers

The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
Réf: Version: Date:
22/21
22INC 19: Session A1: Innovative Navigation Solutions 1. Chair: Terry Moore
2.0 Tuesday 21th November Authors: [1] Thomas VERHEYDE , [2] Antoine BLAIS, [2] Christophe Macabiau, [3] François-Xavier MARMET
III) Results Analysis – 𝒄 ሶ𝜹𝒕
Receiver Septentrio PolaRX5S*
u-bloxM8T*
Samsung S8*
Google Pixel 3
Honor View 20
Xiaomi Mi 8
XiaomiMi 9
Samsung S10+
𝝈𝒄 ሶ𝜹𝒕 [𝒎/𝒔] < 0.03 0.14 0.18 4.72 0.61 0.16 3.93 0.44
2nd Phone
3rd Phone
* Results obtained by Lethova. et al [1]
Qualcomm Snapdragon 845
HiSilicon Kirin 980
Qualcomm Snapdragon 855
BroadcomBCM47755
Qualcomm Snapdragon 855
Qualcomm Snapdragon 835
16
22
0.25
0.26
0.42
Comparing similar smartphones

The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
Réf: Version: Date:
23/21
23INC 19: Session A1: Innovative Navigation Solutions 1. Chair: Terry Moore
2.0 Tuesday 21th November Authors: [1] Thomas VERHEYDE , [2] Antoine BLAIS, [2] Christophe Macabiau, [3] François-Xavier MARMET
III) Results Analysis – 𝒄 ሶ𝜹𝒕
Receiver Septentrio PolaRX5S*
u-bloxM8T*
Samsung S8*
Google Pixel 3
Honor View 20
Xiaomi Mi 8
XiaomiMi 9
Samsung S10+
𝝈𝒄 ሶ𝜹𝒕 [𝒎/𝒔] < 0.03 0.14 0.18 4.72 0.61 0.16 3.93 0.44
2nd Phone
3rd Phone
* Results obtained by Lethova. et al [1]
Qualcomm Snapdragon 845
HiSilicon Kirin 980
Qualcomm Snapdragon 855
BroadcomBCM47755
Qualcomm Snapdragon 855
Qualcomm Snapdragon 835
16
22
0.25
0.26
0.42
Comparing similar chipset manufacturer

The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
Réf: Version: Date:
24/21
24INC 19: Session A1: Innovative Navigation Solutions 1. Chair: Terry Moore
2.0 Tuesday 21th November Authors: [1] Thomas VERHEYDE , [2] Antoine BLAIS, [2] Christophe Macabiau, [3] François-Xavier MARMET
III) Results Analysis – σ𝑷𝑳𝑳
Receiver Septentrio PolaRX5S*
u-bloxM8T*
Samsung S8*
Google Pixel 3
Honor View 20
Xiaomi Mi 8
XiaomiMi 9
Samsung S10+
𝝈𝑷𝑳𝑳 [𝒎] 0.002 0.003 0.8 NaN 0.008 0.018 NaN 0.003
2nd Phone
3rd Phone
* Results obtained by Lethova. et al [1]
Qualcomm Snapdragon 845
HiSilicon Kirin 980
Qualcomm Snapdragon 855
BroadcomBCM47755
Qualcomm Snapdragon 855
Qualcomm Snapdragon 835
17
22
0.018
0.014
0.008

The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
Réf: Version: Date:
25/21
25INC 19: Session A1: Innovative Navigation Solutions 1. Chair: Terry Moore
2.0 Tuesday 21th November Authors: [1] Thomas VERHEYDE , [2] Antoine BLAIS, [2] Christophe Macabiau, [3] François-Xavier MARMET
III) Results Analysis – σ𝑷𝑳𝑳
Receiver Septentrio PolaRX5S*
u-bloxM8T*
Samsung S8*
Google Pixel 3
Honor View 20
Xiaomi Mi 8
XiaomiMi 9
Samsung S10+
𝝈𝑷𝑳𝑳 [𝒎] 0.002 0.003 0.8 NaN 0.008 0.018 NaN 0.003
2nd Phone
3rd Phone
* Results obtained by Lethova. et al [1]
Qualcomm Snapdragon 845
HiSilicon Kirin 980
Qualcomm Snapdragon 855
BroadcomBCM47755
Qualcomm Snapdragon 855
Qualcomm Snapdragon 835
17
22
0.018
0.014
0.008
Comparing phones’ performance to commercial GNSS receivers

The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
Réf: Version: Date:
26/21
26INC 19: Session A1: Innovative Navigation Solutions 1. Chair: Terry Moore
2.0 Tuesday 21th November Authors: [1] Thomas VERHEYDE , [2] Antoine BLAIS, [2] Christophe Macabiau, [3] François-Xavier MARMET
III) Results Analysis – σ𝑷𝑳𝑳
Receiver Septentrio PolaRX5S*
u-bloxM8T*
Samsung S8*
Google Pixel 3
Honor View 20
Xiaomi Mi 8
XiaomiMi 9
Samsung S10+
𝝈𝑷𝑳𝑳 [𝒎] 0.002 0.003 0.8 NaN 0.008 0.018 NaN 0.003
2nd Phone
3rd Phone
* Results obtained by Lethova. et al [1]
Qualcomm Snapdragon 845
HiSilicon Kirin 980
Qualcomm Snapdragon 855
BroadcomBCM47755
Qualcomm Snapdragon 855
Qualcomm Snapdragon 835
17
22
0.018
0.014
0.008
Comparing similar smartphones

The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
Réf: Version: Date:
27/21
27INC 19: Session A1: Innovative Navigation Solutions 1. Chair: Terry Moore
2.0 Tuesday 21th November Authors: [1] Thomas VERHEYDE , [2] Antoine BLAIS, [2] Christophe Macabiau, [3] François-Xavier MARMET
III) Results Analysis – σ𝑷𝑳𝑳
Receiver Septentrio PolaRX5S*
u-bloxM8T*
Samsung S8*
Google Pixel 3
Honor View 20
Xiaomi Mi 8
XiaomiMi 9
Samsung S10+
𝝈𝑷𝑳𝑳 [𝒎] 0.002 0.003 0.8 NaN 0.008 0.018 NaN 0.003
2nd Phone
3rd Phone
* Results obtained by Lethova. et al [1]
Qualcomm Snapdragon 845
HiSilicon Kirin 980
Qualcomm Snapdragon 855
BroadcomBCM47755
Qualcomm Snapdragon 855
Qualcomm Snapdragon 835
17
22
0.018
0.014
0.008
Comparing similar chipset manufacturer

The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
Réf: Version: Date:
28/21
28INC 19: Session A1: Innovative Navigation Solutions 1. Chair: Terry Moore
2.0 Tuesday 21th November Authors: [1] Thomas VERHEYDE , [2] Antoine BLAIS, [2] Christophe Macabiau, [3] François-Xavier MARMET
III) Results Analysis – σ𝑫𝑳𝑳
Receiver Septentrio PolaRX5S*
u-bloxM8T*
Samsung S8*
Google Pixel 3
Honor View 20
Xiaomi Mi 8
XiaomiMi 9
Samsung S10+
𝝈𝑫𝑳𝑳 [𝒎] 0.049 0.22 6.42 1.88 0.152 0.68 0.24 0.97
2nd Phone
3rd Phone
* Results obtained by Lethova. et al [1]
Qualcomm Snapdragon 845
HiSilicon Kirin 980
Qualcomm Snapdragon 855
BroadcomBCM47755
Qualcomm Snapdragon 855
Qualcomm Snapdragon 835
18
22
1.06
0.71
0.135

The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
Réf: Version: Date:
29/21
29INC 19: Session A1: Innovative Navigation Solutions 1. Chair: Terry Moore
2.0 Tuesday 21th November Authors: [1] Thomas VERHEYDE , [2] Antoine BLAIS, [2] Christophe Macabiau, [3] François-Xavier MARMET
III) Results Analysis – σ𝑫𝑳𝑳
Receiver Septentrio PolaRX5S*
u-bloxM8T*
Samsung S8*
Google Pixel 3
Honor View 20
Xiaomi Mi 8
XiaomiMi 9
Samsung S10+
𝝈𝑫𝑳𝑳 [𝒎] 0.049 0.22 6.42 1.88 0.152 0.68 0.24 0.97
2nd Phone
3rd Phone
* Results obtained by Lethova. et al [1]
Qualcomm Snapdragon 845
HiSilicon Kirin 980
Qualcomm Snapdragon 855
BroadcomBCM47755
Qualcomm Snapdragon 855
Qualcomm Snapdragon 835
18
22
1.06
0.71
0.135
Comparing phones’ performance to commercial GNSS receivers

The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
Réf: Version: Date:
30/21
30INC 19: Session A1: Innovative Navigation Solutions 1. Chair: Terry Moore
2.0 Tuesday 21th November Authors: [1] Thomas VERHEYDE , [2] Antoine BLAIS, [2] Christophe Macabiau, [3] François-Xavier MARMET
III) Results Analysis – σ𝑫𝑳𝑳
Receiver Septentrio PolaRX5S*
u-bloxM8T*
Samsung S8*
Google Pixel 3
Honor View 20
Xiaomi Mi 8
XiaomiMi 9
Samsung S10+
𝝈𝑫𝑳𝑳 [𝒎] 0.049 0.22 6.42 1.88 0.152 0.68 0.24 0.97
2nd Phone
3rd Phone
* Results obtained by Lethova. et al [1]
Qualcomm Snapdragon 845
HiSilicon Kirin 980
Qualcomm Snapdragon 855
BroadcomBCM47755
Qualcomm Snapdragon 855
Qualcomm Snapdragon 835
18
22
1.06
0.71
0.135
Comparing similar smartphones

The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
Réf: Version: Date:
31/21
31INC 19: Session A1: Innovative Navigation Solutions 1. Chair: Terry Moore
2.0 Tuesday 21th November Authors: [1] Thomas VERHEYDE , [2] Antoine BLAIS, [2] Christophe Macabiau, [3] François-Xavier MARMET
III) Results Analysis – σ𝑫𝒐𝒑𝒑𝒍𝒆𝒓
Receiver Septentrio PolaRX5S*
u-bloxM8T*
Samsung S8*
Google Pixel 3
Honor View 20
Xiaomi Mi 8
XiaomiMi 9
Samsung S10+
𝝈𝑫𝒐𝒑 [𝑯𝒛] N/A N/A N/A 4.79 0.23 0.10 1.27 0.05
2nd Phone
3rd Phone
* Results obtained by Lethova. et al [1]
Qualcomm Snapdragon 845
HiSilicon Kirin 980
Qualcomm Snapdragon 855
BroadcomBCM47755
Qualcomm Snapdragon 855
Qualcomm Snapdragon 835
19
22
0.11
0.14
0.19

The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
Réf: Version: Date:
32/21
32INC 19: Session A1: Innovative Navigation Solutions 1. Chair: Terry Moore
2.0 Tuesday 21th November Authors: [1] Thomas VERHEYDE , [2] Antoine BLAIS, [2] Christophe Macabiau, [3] François-Xavier MARMET
III) Results Analysis – σ𝑫𝒐𝒑𝒑𝒍𝒆𝒓
Receiver Septentrio PolaRX5S*
u-bloxM8T*
Samsung S8*
Google Pixel 3
Honor View 20
Xiaomi Mi 8
XiaomiMi 9
Samsung S10+
𝝈𝑫𝒐𝒑 [𝑯𝒛] N/A N/A N/A 4.79 0.23 0.10 1.27 0.05
2nd Phone
3rd Phone
* Results obtained by Lethova. et al [1]
Qualcomm Snapdragon 845
HiSilicon Kirin 980
Qualcomm Snapdragon 855
BroadcomBCM47755
Qualcomm Snapdragon 855
Qualcomm Snapdragon 835
19
22
0.11
0.14
0.19
Comparing similar smartphones

The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
Réf: Version: Date:
33/21
The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
33
I. Introductiona. Contextb. Motivationsc. Objectives
II. Methodologya. Experimentation Protocolb. Clock Drift Estimationc. DLL Jitter Estimation d. PLL & Doppler Jitter Estimation
III. Results Analysis
IV. Conclusions
OUTLINE
20
22

The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
Réf: Version: Date:
34/21
34INC 19: Session A1: Innovative Navigation Solutions 1. Chair: Terry Moore
2.0 Tuesday 21th November Authors: [1] Thomas VERHEYDE , [2] Antoine BLAIS, [2] Christophe Macabiau, [3] François-Xavier MARMET
IV) Conclusions
21
22
▪ Smartphone embedded GNSS receivers have been successfully characterized for a nominal performance scenario (open sky conditions).
▪ Estimated parameters for similar phones (same model) tend to be equals and therefore can be modeled.
▪ Further analysis need to be made in order to draw a clear correlation between the estimated parameters (DLL, PLL, Doppler jitters & Clock Drift) and GNSS chipset brands/models.
▪ A characterization method will be established for urban canyons environment
▪ Android Flags need a deeper investigation (cycle slip detection)

The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
Réf: Version: Date:
35/21
35INC 19: Session A1: Innovative Navigation Solutions 1. Chair: Terry Moore
2.0 Tuesday 21th November Authors: [1] Thomas VERHEYDE , [2] Antoine BLAIS, [2] Christophe Macabiau, [3] François-Xavier MARMET 22
IV) Conclusions - References
22
[2] Gioia, Ciro & Damy, Sophie & Borio, Daniele. (2019). Precise Time in your Pocket: Timing Performance of Android Phones. 137-148. 10.33012/2019.16749.
[1] Lehtola, V. V., Söderholm, S., Koivisto, M., & Montloin, L. (2019). Exploring GNSS crowdsourcing feasibility: Combinations of measurements for modeling smartphone and higher end GNSS receiverperformance. Sensors (Switzerland), 19(13), 1-17. [3018]. https://doi.org/10.3390/s19133018
[3] Lachapelle, Gérard & Gratton, Paul & Horrelt, Jamie & Lemieux, Erica & Broumandan, Ali. (2018). Evaluation of a Low Cost Hand Held Unit with GNSS Raw Data Capability and Comparison with an Android Smartphone. Sensors. 18. 4185. 10.3390/s18124185.
[4] Garello, Roberto & Samson, Jaron & Spirito, Maurizio & Wymeersch, Henk. (2012). Peer-to-Peer Cooperative Positioning: Part II: Hybrid Devices with GNSS & Terrestrial Ranging Capability. Inside GNSS.
[5] De Bakker, Peter & Samson, Jaron & Joosten, P & Spelat, M & Martin, Hollreiser & Ambrosius, B. (2006). EFFECTS OF RADIO FREQUENCY INTERFERENCE ON GNSS RECEIVER OUTPUT.

The French Civil Aviation University
La référence aéronautique
Ecole Nationale de l’Aviation Civile
www.enac.fr
Réf: Version: Date:
36/21
36
Questions ?
INC 19: Session A1: Innovative Navigation Solutions 1. Chair: Terry Moore 2.0 Tuesday 21th November Authors: [1] Thomas VERHEYDE , [2] Antoine BLAIS, [2] Christophe Macabiau, [3] François-Xavier MARMET
Statistical Analysis of Android GNSS Raw Data Measurements in
an Urban Environment for Smartphone Collaborative Positioning Methods
T. Verheyde , A. Blais , C. Macabiau , F.X. Marmet Telecommunication Research Laboratory– TéSA, Toulouse, France.
École Nationale Aviation Civile (ENAC) - Université de Toulouse, FranceCentre National d’Etudes Spatiales (CNES) – Toulouse, France
[thomas.verheyde],[blais],[macabiau]@recherche.enac.fr [email protected]
[1,2] [2] [2] [3]
[3]
[2]
[1]
Thesis financed by:
Tuesday 21th November 2019 – INC 19 – Edinburgh
Recommended