1
BusMezzo
Dynamic Transit Operations Tool with Passenger Route Choice
Oded Cats
Centre for Traffic Research (CTR)
Kungliga Tekniska Högskolan (KTH)
2011-01-13 Transportforum 2011 Linköping

2
Outline
• Dynamic transit model
• Model components:
– Traffic Simulation Model
– Transit operations
– Passenger decisions
Choice-set generation
Dynamic route choice
• Case study: Real-time information

3
Motivation and Objectives
• Existing transit models are static
– Simplifying assumptions regarding traveler behavior, traffic
conditions and transit operations
– Suitable for strategic planning of route network, time-
tables, etc.
– Not suitable for operations analysis, Advanced Public Transport
Systems (APTS) evaluation
• Need for dynamic transit modeling tool
– Capturing the dynamics of traffic conditions, traveler behavior
and transit operations at a network-wide level
– Experimental tool for assessing how operations strategies address
policy objectives

4
Potential Applications
• Planning
▫ Effects of transit route changes
▫ Time-table assessment
▫ Service coordination
• Operations
▫ Public transport performance and level of service analysis
▫ Impacts of transit priority
▫ Restoration from major disruptions
▫ Fleet assignment efficiency
• Real-time
▫ Evaluation of real-time control strategies
▫ Real-time traveler information evaluation

5
Transit model componentsPassengers
• Origin-Destination• Choice-set composition
• Path choice decisions
• Travel preferences• Information
Transit operations• Routes
• Time-tables
• Dwell time• Vehicle scheduling
• Boarding and alighting processes
• Control strategies
Traffic dynamics
• Speed-volume relationship• Turning movements
• Traffic signals
• Segregated lanes• Car-bus interaction
• Route choice
APTS

6
Mezzo
• A mesoscopic traffic simulation
▫ Event based
▫ Stochastic processes
▫ Traffic dynamics:
▫ Aggregate behavior on links
▫ Turn-specific queue servers
▫ Enables large scale applications
▫ OOP (C++)
▫ Open-source
Running part Queue part

7
Transit operations
• Modeling sources of uncertainty
• Suitable for APTS applications
• Transit processes:
▫ Time-tables
▫ Vehicle scheduling
▫ Travel time
▫ Boarding and alighting processes
▫ Dwell time
▫ Capacity constraints
▫ Holding control strategies

8
Control strategies study
BusMezzo – Modeling transit dynamics within a mesoscopic traffic simulation
Validating the model by applying the transit operation model to a bus line in Tel-Aviv
Analyzing holding control strategies based on the Tel-Aviv case study
Multi-perspective evaluation of various holding strategies for trunk line 1 in Stockholm
Conducting a field study
Toledo T., Cats O., Burghout W. and Koutsopoulos H.N. (2010). Mesoscopic simulation for transitoperations. Transportation Research Part C – Emerging Technologies, 18(6), 896-908.

9
Passenger demand modeling
• Different levels of demand representation
1. Boarding and alighting rates
2. Demand matrix per line
3. OD matrix in terms of stops
4. OD matrix in terms of zones
Attractive set
Passenger loading
Network configurationEstimated travel timesHeadways/ Time-table
Prior-knowledgeTraveler preferencesDecision Rules Actual experienceReal-time informationCapacity
Choice-set
generation
Route choice

12
Choice-set generation
• Limited studies (Fiorenzo-Catalano et al. 2004; Van Nes et al.
2008)
• Recursive search method
• Static choice-set as a preliminary phase

13
What is an alternative?
• OD stops / OD TAZ
• Connection distances
• Clustering transfer stops
• Clustering common lines
2s
4s
3s
6s5s
8s
7s
1l
2l
3l
4l
5l
6l
1c2c
3c
4c
5c
6c
1s
0c
0c
9s
0c
0c
0c
0c
0c

14
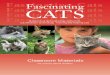
Dynamic route choice
Boarding this
vehicle?No
Yes
Start
BOARDING
decision model
Arriving
transit
vehicle
ALIGHTING
decision model
Approaching
transit stop
Alighting at
the next
stop?
No
CONNETION
decision model
Yes
Arrived at
destination?
End
Yes
No
CONNETION
decision model
Traveler information(prior-
knowledge, type, location, com
prehensiveness)

15
• 3 lines, 7 branches, 100 stations with 210 platforms
• 10 min headway, schedule-based holding control
• Choice-set generation process: 14,699 alternative paths
Stockholm Metro case study
Experiment description

16
Operation conditions / Level of RTI provision
(R) Regularconditions
(DF) Disruptionat green line
service frequency
(DR) Disruption at blue line riding times
(1) Platform-level RTI
R1 DF1 DR1
(2) RTI for all platforms at the
same stop
R2 DF2 DR2
(3) RTI for thewhole network
R3 DF3 DR3
Stockholm Metro case study
Scenarios design• Evaluating the effect of RTI provision on passenger route
choice
• Service disruptions
• A 50% reduction in frequency
• A 15 minutes delay in riding time

17
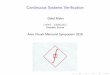
9 min
3 min
2 min
2 min
Stadshagen
Fridhemsplan
Gamla stan
2 X H
=10 min
2 X
H=
10 m
in
3 X H=10 min
T-Centralen
RTI Metro case study
Route choice alternatives
Ropsten
Hässelby strand
Akalla
Norsborg Farsta strand
Gullmarsplan
SlussenAlvik

18
RTI Metro case study
Passenger journey time under different operation conditions and levels of RTI
Scenario Total journey time
[sec]
In-vehicle time
[sec]
Out-of-vehicle time
[sec]
R1 1081 554 527
R2 1046 557 489
R3 1035 538 497
DF1 1418 553 865
DF2 1293 545 748
DF3 1260 523 737
DR1 1771 1116 655
DR2 1733 1115 617
DR3 1603 1054 549

19
• RTI provision has the potential to yields substantial
path choice shifts and time savings
• Particularly significant time savings in case of irregular
service conditions
• A simple improvement in transfer coordination can be
very beneficial
• The incorporation of walking times is important in the
context of transit route choice
• Proof of concept
Stockholm Metro case study
Conclusions

20
On-going developments
• Transit operation strategies
– Preparing a field study for testing the even-headway control strategy
– Optimizing the number and location of time-point stops
– Analyzing the case of a common corridor
• Choice-set generation model
– Formulating an estimation method
– Implementing the method using the survey data
• Designing a validation study of the transit assignment
model
Recommended