Quantum Mechanics
of
Degenerate Dynamical Systems
Tesis entregada a la
Pontificia Universidad Catolica de Valparaıso
en cumplimiento parcial de los requisitos
para optar al grado de
Doctor en Ciencias Fısicas
Facultad de Ciencias
por
Fiorenza de Micheli
Noviembre 2013
Directores de tesis: Jorge Zanelli
Sergio del Campo


FACULTAD DE CIENCIAS
Pontificia Universidad Catolica de Valparaıso
INFORME DE APROBACION
TESIS DE DOCTORADO
Se informa a la Direccion de Estudios Avanzados que la Tesis de Doctorado presen-
tada por la candidata
Fiorenza de Micheli
ha sido aprobada por la Comision de Evaluacion de la Tesis como requisito para
optar al grado de Doctor en Ciencias Fısicas, en el examen de Defensa de Tesis
rendido el 29 de Noviembre de 2013
Directores de tesis: Dr. Jorge Zanelli .........................................
Dr. Sergio del Campo .........................................
Comision de Evaluacion de la Tesis:
Dra. Olivera Miskovic (Presidente) .........................................
Dr. Jorge Zanelli .........................................
Dr. Sergio del Campo .......................................
Dr. Fabrizio Canfora .........................................
Dr. Joel Saavedra .........................................


to my families:
my ancient roots and
my future branchees
with me in the middle
so...
walls were my prison first
and then my freedom


Vaga luna, che inargenti
queste rive e questi fiori
ed inspiri
ed inspiri agli elementi
il linguaggio
il linguaggio dell’amor;
testimonio or sei tu sola
del mio fervido desir,
ed a lei
ed a lei che m’innamora
conta i palpiti
i palpiti e i sospir.
Vincenzo Bellini


Contents
Introduction 2
1 Classical degenerate systems 6
1.1 Review of degenerate systems . . . . . . . . . . . . . . . . . . . . . . 6
1.2 Dynamical role of the degeneracy . . . . . . . . . . . . . . . . . . . . 11
1.3 Local coordinates transformations . . . . . . . . . . . . . . . . . . . 12
1.3.1 Darboux coordinates . . . . . . . . . . . . . . . . . . . . . . . 12
1.3.2 Time reparametrization . . . . . . . . . . . . . . . . . . . . . 13
1.3.3 Example: dynamically degenerate harmonic oscillator . . . . . 14
1.4 Reducible and irreducible degenerate systems . . . . . . . . . . . . . 20
2 The quantum problem 23
2.1 Formalism . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.2 The quantum problem: simplest first order Lagrangian . . . . . . . . 24
2.3 Dealing with the degeneracy . . . . . . . . . . . . . . . . . . . . . . . 27
2.3.1 Excluding the degeneracy: x ∈ (0, a) . . . . . . . . . . . . . . 27
2.3.2 Probability density . . . . . . . . . . . . . . . . . . . . . . . . 29
2.3.3 Example: a wave packet . . . . . . . . . . . . . . . . . . . . . 30
2.3.4 Including the degeneracy: x ∈ (a−, a+), a− < 0 < a+ . . . . . 31
2.4 Tunneling: equation of continuity . . . . . . . . . . . . . . . . . . . . 35
3 Coupled system 37
3.1 General classical solution . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.2 Quantum coupled system . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.3 Continuity equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4 Path integral 47
4.1 Propagator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
9

CONTENTS
5 Discussion 54
5.1 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
5.2 Open questions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
A On the self-adjointness 58
B Integrating the continuity equation 60
B.1 The contribution of the discontinous probablity current . . . . . . . . 60
C Calculating the propagator 62
10

Abstract
Degenerate dynamical systems are characterized by symplectic structures whose
rank is not constant throughout phase space. The degenerate phase space is divided
into causally disconnected, nonoverlapping regions such that there are no classical
orbits connecting two different regions. Here the question of whether this classi-
cal disconnectedness survives quantization is addressed. Our conclusion is that in
irreducible degenerate systems –in which the degeneracy cannot be eliminated by re-
defining variables in the action–, the disconnectedness is maintained in the quantum
theory: there is no quantum tunnelling across degeneracy surfaces. This shows that
the degeneracy surfaces are boundaries separating distinct physical systems, not
only classically, but in the quantum realm as well. The relevance of this feature for
gravitation and Chern-Simons theories in higher dimensions cannot be overstated.

Introduction
Classical degenerate systems are characterized by an evolution which is globally
determined by the equations of motion, except on a certain set Σ of measure zero in
phase space Γ. On this set the evolution is indeterminate because the matrix that
multiplies the highest derivatives in the evolution equations –the Hessian matrix in
the Lagrangian formalism or the symplectic form in the Hamiltonian description–,
degenerates: its determinant vanishes there [1]. This produces an abrupt change
in the order dynamical equation, or a change of character between a hyperbolic
evolution equation and an elliptic boundary value problem [36].
Many physically relevant systems including gravitation and Chern-Simons the-
ories in dimensions greater than four [2], vortex interactions in fluids [3, 4], and
piecewise smooth systems in electronics, mechanics or engineering (the so-called
Filippov systems), exhibit this feature [5]. Degenerate systems can also be found
in the force-free plasma equations that govern the strong electromagnetic fields in
quasar magnetospheres [6].
Generically, the degeneracy sets are surfaces of codimension one in phase space,
and higher codimension at their intersections. These surfaces split the phase space
into nonoverlapping regions, causally disconnected from each other, each describing a
nondegenerate system. A classical system would lose degrees of freedom irreversibly
if its orbits reach a degeneracy surface; the Liouville current is not conserved at the
degeneracy surfaces where there is a net ingoing or outgoing flux. The sign of the
flux distinguishes between sources and endpoints of orbits. In the latter case, once
the system reaches the domain wall, it generically acquires a new gauge invariance
and one degree of freedom is frozen, while the remaining degrees of freedom evolve
regularly thereafter [1].
Degeneracies of this kind present challenges that require extending the stan-
dard treatments. For instance, in Dirac’s time-honored approach for constrained
Hamiltonian systems [8], [9], [10], the rank of the symplectic form is less than the
phase space dimension, but constant throughout Γ. In degenerate systems, instead,
2

the rank is not constant throughout phase space. For this peculiarity a quantum
formulation of these system is not available.
Some degenerate systems like, Chern-Simons theories in dimensions higher than
three, may have constraints that are not functionally independent in some region of
phase space (irregularity) constraints whose rank is not constant throughout phase
space (irregularity). This problem makes the formulation of a quantum problem
much more complex and will not be discussed here.
Although degenerate systems could be viewed as extensions of constrained sys-
tems, degeneracy is explicitly excluded from the hypotheses of the standard Dirac
approach, and this introduces conceptual difficulties that must be addressed [12].
Our aim is to clarify to what extent the difficulties in degenerate systems are insur-
mountable obstacles for their quantization, or whether they can be circumvented,
reducing the problem to one already known and solved. Our conclusion is that de-
generate systems can be quantized following the standard postulates of quantum
mechanics, although they exhibit a number of peculiar and unexpected features.
One surprising aspect of degenerate systems is that they possess different number
of degrees of freedom in different part of phase space: as they evolve some local
degrees of freedom could be frozen out at the degeneracy surface and become non
dynamical. This seems to correspond to a sort of dynamical dimensional reduction
mechanism in higher-dimensional gravity, where a reduction of degrees of freedom
would correspond, for example, to freezing out some components of the metric,
which implies that the effective geometry has fewer dimensions.
The extension of this analysis beyond system of a finite number of degrees of
freedom to field theory is an important question. A crucial issue in the quantization
of Yang-Mills theories is the Gribov ambiguity, a problem that may be relevant for
the understanding of confinement in nonabelian gauge theories [7]. This problem
manifests in the occurrence of Gribov horizons, where the matrix of Poisson brack-
ets between generators of gauge transformations and gauge fixing conditions is not
invertible. This can be understood as an indication that gauge conditions in general
fail to do the job of eliminating the gauge degrees of freedom, which is related to the
fact that the gauge generators and the gauge fixing constraints become degenerate
at the Gribov horizons. Hence, understanding quantum degenerate systems may
shed some light on the Gribov ambiguity issue. It is known that in a generic gauge,
the presence of Gribov horizons affects the quantization procedure, but this is an
independent inevitable feature of nonabelian gauge theories.
3

Introduction
The first part of this thesis is intended as a review of the properties of degenerate
sistems as presented in [1]; we then investigate the aspects that make the degeneracy
an intrinsic property and we clarify the consequences of this degeneratcy on the
dynamics of the system, both globally and locally.
Chapter 1 provides the necessary classical background in the context of the first
order formalism; the advantage of this formalism is that in principle it includes all
hamiltonian dynamical systems, giving rise to simpler equations of motion. These
equations are first order and the pre-symplectic form depends generically on the
coordinates. In Section 1.2 we outline the role of the pre-symplectic form and the
hamiltonian as the main although independent characters in the evolution of the
system.
In Section 1.3 we investigate how a change of coordinates or a reparametrization
of time can remove at least locally the presence of degeneracy and we illustrate the
results with the example of a dynamically degenerate harmonic oscillator. Finally
Section 1.4 distinguishes what we called irreducible degenerate systems as those
that cannot be handled with equivalent and simpler reformulation of their action
principle, neither globally nor locally, so a special treatment is needed to quantize
them.
Chapter 2 is devoted to the quantization of degenerate systems in the Schrodinger
approach. The method and the results are illustrated with two examples, a pure
simple degenerate system and a mixed one composed by a degenerate system cou-
pled to a regular (harmonic oscillator). In this chapter we construct the quantum
formalism: the basic fact is that using the canonical substitution, by promoting
the Dirac bracket to a commutator, the classical degeneracy surface appears as a
singular set of the Hamiltonian domain. With a simple model in Section 2.2 we
show how to manage the Hamiltonian as a singular differential operator in an ap-
propriate Hilbert space, excluding or including this singularity. The conclusion is
that the degeneracy surface appears as a barrier that does not allow transmission
of information across it.
The absence of tunnelling is confirmed in Section 2.4 by the continuity equation
for the Schrodinger equation. In order to investigate further this issue in the case of
more complex dynamics, in Chapter 3 we quantum analyze a mixed system whose
classical form had been studied in [1]. This system consists of a regular harmonic
oscillator coupled to the simple degenerate system already discussed in Section 2.2.
Following the same line of reasoning as before, no tunnelling effects are found in
this mixed case either (Section 3.3). After the canonical method, we investigate in
4

Chapter 4 the quantization of the same simple degenerate system of the Chapter 4
with the famous alternative method of the path integral: our conclusion is that also
in this approach tunneling effects are excluded. Finally, Chapter 5 summarizes the
results and presents some open questions that illustrate possible lines for further
investigation.
5

Chapter 1
Classical degenerate systems
In this chapter we analyze the classical dynamics of degenerate systems, building on
the ideas developed in [1]. Let us begin by considering a dynamical system in the
2n-dimensional phase space Γ whose state at time t is described by its coordinates
zi(t) ∈ Γ. In order to fix ideas, consider that the equations of motion of this system
are given by a first order action
I[z; 1, 2] =
∫ t2
t1
[Ai(z)zi + A0(z)]dt, with i = 1, 2, · · · 2n, (1.1)
In spite of its simplicity, a system described by the above action 1.1 captures the
problem we are interested in and, at the same time, represents any dynamical hamil-
tonian system - degenerate or not - of a finite number of degrees of freedom (see [13]
and Section 1.2).
Observe that the above general formula can be viewed as an action in Hamiltonian
form where zi = (p, q) are noncanonical coordinates in phase space Γ, if we recog-
nize the Hamiltonian in the function −A0(z) and we identify the functions Ai(z)
with the noncanonical momenta. Alternatively, the integrand L(z, z) = Aizi + A0
can be taken as the Lagrangian for a system with 2n primary constraints φi(z, p) =
pi − Ai(z) ≈ 0. In both cases, in order to set the equations of motion as an analyt-
ically well-posed problem, we require Ai(z) and A0(z) to be functions of class C1,
i.e., continuous differentiable at least.
1.1 Review of degenerate systems
In this section, we review the results reported in [1]. According to the Hamilton’s
principle of least action, the trajectory of a system coincides with the path that
6

1.1 Review of degenerate systems
extremizes its action. Varying the action (1.1) with respect to z(t) we find
δI =
∫ t2
t1
δzi[Fij(z)zj + Ei(z)
]+ δziAi(z)
∣∣t2t1
(1.2)
where1
Fij ≡ ∂iAj − ∂jAi, (1.3)
Ei ≡ ∂iA0. (1.4)
We are looking for the extremal curve that satisfies δI = 0 under arbitrary vari-
ation of δz, this implies that the two terms on the r.h.s. of (1.2) have to vanish
independently. So the first gives the equations of motion
Fij zj + Ei = 0, (1.5)
and the second imposes condition at the end points of the path
δzi(t2) · Ai(z(t2)
)− δzi(t1) · Ai
(z(t1)
)= 0, (1.6)
The equations 1.5 define a Hamiltonian system where the pre-symplectic two-form
is defined by the skew-symmetric 2n× 2n matrix Fij,
F = dA =1
2Fij(z) dzi ∧ dzj. (1.7)
From (1.5) it follows that ziEi ≡ 0, and therefore the orbits are contained in the
surfaces A0 = constant, which corresponds to the conservation of energy.
In order to implement (1.6) we observe that the usual Dirichlet boundary con-
ditions δzi(t2) = δzi(t1) = 0 are generically incompatible with the equations of
motion. In general, solutions that connect zi(t1) = zi1 to zi(t2) = zi2 do not exist for
arbitrary values of those coordinates because (1.5) is a first order equation. Then, if
the action is to be varied over a class of functions for which the boundary conditions
are adequate for integrating the equations of motion, a weaker compatible boundary
condition can be imposed in our case, namely, periodic boundary conditions
δzi(t2) = δzi(t1), Ai(z(t2)
)= Ai
(z(t1)
), (1.8)
or anti-periodic conditions, zi(t1) + zi(t2) = 0, provided A is odd,
δzi(t2) = −δzi(t1), Ai(− z)
= −Ai(z)
(1.9)
1Here we are interested in autonomous systems with time-independent Ai, but this could beeasily extended to include the time-dependent case, where Ei = ∂iA0 − ∂0Ai.
7

Classical degenerate systems
as is usually the case for fermionic variables.
The identification of the end points would restrict the functional space on which
the action is defined that can be viewed as a restriction on the topology of the
problem, but this does not alter the local character of the equations or the solutions.
As we will see in Chapter 2 this condition agrees with the same periodic boundary
condition one has to impose on the wave function in the quantum version of a
degenerate dynamical system.
Let us now summarize the basic facts about degenerate systems.
• Existence of degeneracy surfaces. Solving (1.5) for zi(t) requires inverting
Fij(z), which is clearly the problem for degenerate systems at the points where the
determinant of Fij(z) vanishes: on the set
Σ = z ∈ Γ |∆(z) = 0 , (1.10)
where ∆(z) = det[Fij(z)], the equations of motion are indeterminate. Analytically,
the degeneracy set Σ ⊂ Γ is defined by one relation among the coordinates zi,
and therefore it corresponds generically to a collection of codimension one surfaces,
which eventually divide the phase space into dynamically disconnected regions, as
shown in [1].
• Robustness of degeneracies. The degenerate character of a dynamical sys-
tem is a feature that cannot be eliminated by an appropriate change of coordinates.
To see this, it suffices to observe that the determinant of the pre-symplectic form,
∆ =det(Fij), transforms as a pseudoscalar under coordinate changes
∆→ ∆′ = J2∆ , (1.11)
where J is the Jacobian of the transformation z → z′. Hence, the zeros of detF
cannot be removed by general coordinate transformations in phase space.
• Intrinsic two-dimensionality. Darboux theorem2 states that in a symplectic
manifold M2n, equipped with a nondegenerate differential 2-form ω2, there are
always local coordinates in which the symplectic structure ω2 is represented by the
constant canonical form
ω2 =∑
dpi ∧ dqi . (1.12)
In the case of degenerate dynamical systems the invariance of the degeneracy surfaces
Σ implies that it is impossible to transform the pre-symplectic form F = 12Fij(z)dzi∧
2as fundamental references see [16] and [32], see also [33]
8

1.1 Review of degenerate systems
dzj globally into the canonical symplectic form,
Ωij =
0 1
−1 0
0 1
−1 0. . .
. (1.13)
However, in an open neighborhood it is possible to find Darboux coordinates, such
that F can be block-diagonalized as
Fij =
0 f1(zi)
−f1(zi) 0
0 f2(zi)
−f2(zi) 0. . .
, (1.14)
so that ∆(z) = [f1(z)f2(z) · · · fn(z)]2. Then we can assert that for degenerate sys-
tems only in an open, simply connected set where ∆(z) = [f1(z)f2(z) · · · fn(z)]2 > 0,
there exist a coordinate redefinition for which the pre-symplectic form F can be writ-
ten in the canonical symplectic way, with f1(z) = f2(z) = · · · = fn(z) = 1 (Darboux
theorem). But clearly, this is not possible for degenerate systems in an open set
containing points of degeneracy, z ∈ Σ, where at least one of the fr vanishes.
Moreover, since F is exact, the Bianchi identity dF = 0 implies that each fr(z)
of the block diagonal form is a function of only two coordinates,
F =n∑r=1
fr(z2r−1, z2r)dz2r−1 ∧ dz2r . (1.15)
Finally, the pre-symplectic form (1.3) can be block-diagonalized as
Fij(z) =
0 f1(z1, z2)
−f1(z1, z2) 0
0 f2(z3, z4)
−f2(z3, z4) 0. . .
, (1.16)
and hence, the zeros of ∆(z) = det[Fij(z)] given by∏1≤r≤n
fr(z2r−1, z2r) = 0 , (1.17)
9

Classical degenerate systems
describe the degeneracy sets in two-dimensional surfaces spanned by the coordinates
(z2r−1 , z2r). This means that in order to inspect the dynamical properties of de-
generate systems in the vicinity of the degenerate surfaces, it is sufficient to focus
on two-dimensional submanifolds embedded in phase space,fr(z
2r−1, zr) z2r−1 = −∂rA0(z2r−1; zr)
−fr(z2r−1, zr) zr = −∂2r−1A0(z2r−1; zr) .(1.18)
• Degenerate dynamical flow. Assuming Ai(z) and A0(z) to be of class C1,
then Fij(z) = ∂iAj − ∂jAi and his determinant ∆(z) will be continous well behaved
functions in the phase space Γ. Then, without loss in generality, we can assume fr
to be Morse functions.3 This basically means that the level curves of the functions
fr(z2r−1, z2r) are either infinitely extended lines, isolated points, or closed lines in
the (z2r−1, z2r)-plane, and the sets Σr = z ∈ Γ|fr(z2r−1, z2r) = 0, that are not
isolated points, are simple zeros. Thus, the set Σr are generically either infinitely
long lines or closed curves that separate region where fr have different signs4. This
implies that the components of z on the (z2r−1, z2r)-plane change sign at Σr (see
1.18) and then Σr acts as a generic source or sink for orbits. Moreover, the velocity
field zi has a nonvanishing divergence,
∂izi = f−2εij∂if∂jA0 6= 0 . (1.19)
Consequently, the time evolution of a degenerate system does not preserve the vol-
ume in phase space: the volume v of a small region in phase space evolves as
div v(z) = f−2f,H
, (1.20)
which blows up as the orbit approaches a degeneracy point: v → ±∞, depending
on the sign of the gradient of f along the orbit.
• From second to first class constraints along the evolution. The inte-
grand of the action (1.1) L(z, z) = Ai(z)zi + A0 is a first-order Lagrangian which
can be viewed as a Legendre transform defined on the tangent space of the phase
space Γ. This Lagrangian gives the same equations of motion as the Hamiltonian
3 In the context of the Morse theory, a smooth real valued function f defined on a manifoldf : M → R is a Morse function if its critical points (where the differential of f vanishes) are allnondegenerate (i.e. the Hessian matrix of second order partial derivatives is non singular). Formore details, see [30] and [31].
4Exceptionally, Σ may have a finite number of self intersections and isolated points or cuspswhich can be removed by a continuous deformation of A0.
10

1.2 Dynamical role of the degeneracy
H(z) = −A0 using the presymplectic form 1.3 Fij ≡ ∂iAj − ∂jAi, with 2n primary
constraints φi(z) = pi − Ai(z) ≈ 0.
From Dirac’s formalism for constrained systems, it is essential for the dynamical
interpretation to distinguish between first class constraints, related to the presence
of gauge symmetries, and second class ones, corresponding to redundant degrees of
freedom. The nature of the constraints depends on the rank of the matrix composed
by the brackets of constraints φi, φj. In our case this matrix is given by
φi, φj = Fij(z), (1.21)
where · · · , · · · stands for the Poisson bracket. Then, in the case of degenerate
systems, the constraints appear to be generically of second class φi, φj 6= 0 except
on the degenaracy set, where some of them become first class φi, φj = 0.
• Causally disconnected dynamics. As mentioned above, for degenerate sys-
tems some components5 of the velocity z2r−1 , z2r change sign across Σr. Therefore,
the orbits either start, end, or run tangent to the set Σr. It should be stressed that
the inversion of the velocity happens only in those 2-dimensional subspaces where
the degeneracy occurs, while the dynamics evolves independently in the other coor-
dinates. This means that the classical evolution in those subspaces cannot take the
system across the degeneracy surfaces: there is no causal connection between states
separated by a degeneracy surface.
The question that naturally arises is whether this condition continues to hold if
quantum mechanical effects are taken into account. Can there be tunnelling across
Σ? What happens to a wave packet prepared on one side that corresponds to a
classical trajectory that approaches Σ? This will be discussed in Chapter 2.
1.2 Dynamical role of the degeneracy
As mentioned in the previous section, degeneracies can be studied as intrinsically
two-dimensional problems. This means that in order to analyze the dynamical
properties of degenerates systems near the degeneracy, it is sufficient to focus on
two-dimensional surfaces embedded in phase space. In particular, the equations
of motion (1.5) appear as a system of n equations of two variables (z1, z2), which
5at least one pair of the components of the velocity diverges and changes sign because at leastone of the fr has to vanish in (1.17) when calculating the zero’s of the matrix (1.16) in the newcoordinates
11

Classical degenerate systems
depend parametrically on the remaining coordinates za, So let’s suppose that the
degeneracy is present on the (z1, z2) surface, i.e. the term ff(z1, z2) z1 = −∂2A0(z1, z2; za)
−f(z1, z2) z2 = −∂1A0(z1, z2; za) .(1.22)
The system (1.22) describes a 2-dimensional vector field, not necessarily smooth,
but mildly singular due to the unbounded velocity z → ∞ at f(z1, z2) = 0. This
system represents a continuous directional field6 given by
z2
z1:= tanα(z1, z2; za) = −∂1A0(z)
∂2A0(z), (1.23)
whose integral curves are completely determined by A0(z). This expression is in-
sensitive to the change t → −t, so it carries no information about the reversal of
orientation that takes place at the points where the orbits intersect the degenerate
surfaces Σ. More importantly, this expression is also independent of f , and therefore,
there are infinitely many dynamical systems analogous to (1.22), whose orbits have
the same “shape” but with different dynamics and different degenerate surfaces. In
particular, f(z1, z2) = 1 gives the simplest nondegenerate analogous system, corre-
sponding to a standard mechanical system, with Hamiltonian H = −A0, and z1 = p
and z2 = q.
The level curves A0(z1, z2; za) = constant implicitly define the shape of the or-
bits, while f = ∂1A2(z1, z2)−∂2A1(z1, z2) determines the dynamics, i.e. the pace at
which the orbits are traced. In other words, the Hamiltonian draws the orbits and
the pre-symplectic form determines the time evolution.
1.3 Local coordinates transformations
1.3.1 Darboux coordinates
We have seen that it is impossible to set f(z) = 1 globally by a coordinate change
but, is it possible to do it within an open nondegenerate neighborhood? Is it pos-
sible to find appropriate coordinates, within each nondegenerate domain, so the
dynamical equations look nondegenerate? The answer is yes.
6A direction field is called continuous if tg(α) depends continuously on the points (z1, z2).
12

1.3 Local coordinates transformations
Let us consider a degenerate system given as in (1.22),
f(z)zi = εij∂A0(z)
∂zj, ε12 = −ε21 = 1. (1.24)
In terms of new coordinates ξi(z), this equation reads
ξa =1
f
∂ξa
∂zi∂ξb
∂zjεij∂A0(ξ)
∂ξb=
1
f
∣∣∣∂ξ∂z
∣∣∣εab∂A0(ξ)
∂ξb, (1.25)
which reduces to (1.22), provided
det(∂ξi/∂zk) = f, and A0(ξ) = A0(z(ξ)) . (1.26)
There are certainly many choices of coordinates ξ that satisfy conditions (1.26).
The first condition says that the determinant of the Jacobian for this change of
coordinates vanishes at the degenerate surface. Then the fact that the change of
coordinates z → ξ is valid where det(∂ξi/∂zk) 6= 0 means that the new coordinates
ξ are valid in local regions that exclude the set f(z) = 0. Hence, there are many
regular autonomous systems that have the same dynamics as a degenerate one within
a non-degenerate region. Degenerate dynamical systems can always be reduced to
non-degenerate ones in an open neighbourhood that does not include degenerate
sets. This explains why textbooks on differential equations never discuss degenerate
systems.
1.3.2 Time reparametrization
The fact that the shape of the orbit is independent of f suggests that a change of
time parameter may yield an evolution that could be reproduced by a nondegenerate
dynamical system. If that is the case, then a new time parameter τ(t) should exist
such thatdt
dτ=
1
f(z1, z2). (1.27)
This relation could be integrated if the trajectory zi(t) is known,
τ(t; z0) =
∫ t
t0
f(z1(t′), z2(t′))dt′ . (1.28)
This relation could be integrated for each trajectory zi(t), obtained by solving (1.22)
13

Classical degenerate systems
for some initial conditions. The complete expression for the trajectories depends on
the initial data z0 = (z10 , z
20) and is given by z1(t; z1
0 , z20) and z2(t; z1
0 , z20)
τ(t; z0) =
∫ t
t0
f[z1(t′; z0), z2(t′; z0)
]dt′ . (1.29)
This relation, however is not a redefinition of the time parameter for the entire
dynamical system, but for each individual orbit. Moreover, the reparametrization
τ = τ(t) fails precisely at the degeneracy points, where f changes sign: at f = 0 the
integrand changes sign, its primitive fails to be monotonic, the reparametrization
τ(t; z0) is reversed and becomes singular, regardless of which orbit is considered.
This highlights the fact that the degenerate surfaces that intersect the classical
trajectories are the beginning or the endpoints of orbits.
1.3.3 Example: dynamically degenerate harmonic oscillator
We have already shown that in general is it possible to find appropriate coordinates,
within each nondegenerate domain, so the dynamical equations look nondegenerate.
It is clear that even if in principle it is always possible to find such coordinates, this
can be awkward in practice. Here we will illustrate how a change of coordinates can
set f(z) = 1 locally in an ad-hoc example. Consider a dynamical system of the form
(1.22) corresponding to a “degenerate” harmonic oscillator:p = −1
pq
q =1
pp = 1 .
(1.30)
with hamiltonian H(p, q) = 12(p2 + q2) and degeneracy function f(p, q) = p.
We look for the change of coordinates (p, q) → (P,Q) such that the system
(1.30) in (p, q)-coordinates can be written in new coordinates (P,Q) as the usual
(not degenerate) harmonic oscillator whose Hamiltonian is H(P,Q) = 1/2(P 2 +Q2)
with the standard symplectic form f(P,Q) = 1P = −Q
Q = P .
(1.31)
As discussed in Section 1.2, the orbits are circles in both (p, q) and (P,Q) phase
spaces (see Figures 1.1 and 1.2). The system (1.30) can be described in terms of the
original coordinates p(P,Q) and q(P,Q), using (1.31)
14

1.3 Local coordinates transformations
p
q
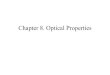
Figure 1.1: Classical orbits for the degenerate harmonic oscillator in the phase space
(p, q) as described in (1.30) with degeneracy set at p = 0: the orbits emerge with
infinite velocity from the negative q semi axes and in a finite time end up with
infinite velocity in the positive q semi axes.
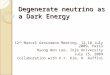
P
Q
Figure 1.2: Classical orbits for the harmonic oscillator in the phase space (P,Q) as
described in (1.31): there is no degeneracy in this space and the orbits are traced
with constant velocity.15

Classical degenerate systems
p =
∂p(P,Q)
∂PP +
∂p(P,Q)
∂QQ =
∂p(P,Q)
∂P(−Q) +
∂p(P,Q)
∂QP = −q(P,Q)
p(P,Q)
q =∂q(P,Q)
∂PP +
∂q(P,Q)
∂QQ =
∂q(P,Q)
∂P(−Q) +
∂q(P,Q)
∂QP = 1
(1.32)
These equations provide a set of first-order semi-linear partial differential equations
for p(P,Q) and q(P,Q),−Q ∂p(P,Q)
∂P+ P
∂p(P,Q)
∂Q= −q(P,Q)
p(P,Q)
−Q ∂q(P,Q)
∂P+ P
∂q(P,Q)
∂Q= 1 ,
(1.33)
which can be solved for some initial or boundary conditions. Let’s observe that the
characteristic curves7 of both differential equations in (1.33) are by construction the
orbits of the non-degenerate analogous system (1.31), that is,P = −Q
Q = P
−→ P 2 +Q2 = P 20 +Q2
0 . (1.34)
Inorder for this to be a well-posed problem, it will be sufficient to give an initial
condition on a curve that intersects these characteristic curves only once. We choose
for simplicity to give initial boundary conditions on the semi positive P -axes asq(P > 0, Q = 0) = 0
p(P > 0, Q = 0) = P(1.35)
Solving the second of (1.33) for q(P,Q), with these boundary conditions, one finds
q(P,Q) = arctg
(Q
P
)(modnπ), (1.36)
which is the angle measured from the P -axis. The arctangent function is multivalued
so, in order for q(P,Q) to cover the interval [0, 2π] in the (P,Q)-plane, we include a
7The method of characteristics is the technique for solving partial differential equations reducingthem to ordinary differential equation along the characteristic curves, see for example [34], [35].
16

1.3 Local coordinates transformations
p
q
Figure 1.3: Coordinate lines for P in
the (p, q) space as given by (1.39).
p
q
Figure 1.4: Coordinate lines for Q in
the (p, q) space as given by (1.39).
branch cut along the semi positive P -axis. With this solution for q(P,Q), the first
equation in (1.35) becomes
−Q ∂p(P,Q)
∂P+ P
∂p(P,Q)
∂Q= −
arctg(QP
)p(P,Q)
, (1.37)
which can be integrated for the boundary condition p(P > 0, Q = 0) = P , giving
p2 = (P 2 +Q2)− arctg2(QP
). (1.38)
We are interested in the inverse functions, P (p, q) and Q(p, q),P = ±
√(p2 + q2)cos(q)
Q = ±√
(p2 + q2)sin(q)
(1.39)
whose contour lines are drawn in Fig. (1.3) and (1.4).
The Jacobian determinant for this change of coordinates is
detJ =
∣∣∣∣∣∂(P,Q)
∂(p, q)
∣∣∣∣∣ = p . (1.40)
As expected from (1.26), the Jacobian vanishes with the degeneracy function. This
means that the new set of coordinates (P,Q) is well defined everywhere in the (p, q)
17

Classical degenerate systems
p
q
Figure 1.5: Contour lines of the new coordinates (P,Q) in the (p, q) space. This
new set of coordinates fails at p = 0: here the lines P and Q are tangent.
18

1.3 Local coordinates transformations
p
q
Figure 1.6: How are transformed the degenerate set p = 0 and a degenerate orbit in
the nondegenerate phase space? These are drawn with the same color in the (p, q)
space in the Fig. (1.7).
P
Q
p=0
Figure 1.7: The blue line is the degenerate set p = 0 described by√P 2 +Q2 =
arctg(P,Q), a curve known as Archimedean spiral (see 1.38 ). The red curve repre-
sents both two branches of the degenerate orbit in the nondegenerate(P,Q) plane.
Compare with above figure (1.6).
19

Classical degenerate systems
space except on the set p = 0, where the coordinates lines of P and Q are tangent
(see Fig (1.5)). Thus, changing to (P,Q) coordinates in the (p, q) phase space
allows to describe the degenerate oscillator as a non degenerate one only locally:
the dynamical equations of the system (1.30) look non-degenerate only in region
that excludes the degenerate set.
Next, we consider the time reparametrization that could eliminate the degeneracy
in the (p, q) coordinates. Actually, it is easier to look for the inverse reparametriza-
tion, which produces the degeneracy in the nondegenerate coordinates. In other
words, we look for a time parameter t = t(τ) such that if it is applied to an ordinary
harmonic oscillator in coordinates (p, q) the equations becomedpdτ
= dpdt
dtdτ
= −1pq
dqdτ
= dqdt
dtdτ
= 1pp = 1
(1.41)
Solving for the nondegenerate part in term of time t one finds the solution depending
on the initial conditions (po, qo)dpdt
= −q
dqdt
= p
→
p(t; p0, q0) =
√p2
0 + q20 cos
(t+ arctan(q0/p0)
)q(t; p0, q0) =
√p2
0 + q20 sin
(t+ arctan(q0/p0)
) (1.42)
Then, the time τ is given by equation (1.29) that in this case reads
τ(t; p0, q0) =
∫ t
t0
p(t′; p0, q0) dt′ =
∫ t
t0
√p2
0 + q20 cos
[t+ arctan(q0/p0)
]dt′ =
=√p2
0 + q20 sin
[t+ arctan
(q0
p0
)]t(τ ; p0, q0) = arcsin
[τ√
p20 + q2
0
]− arctan
(q0
p0
)(1.43)
Clearly this time reparametrization t = t(τ) is valid only for τ in the interval (−1, 1)
and cover the range t in intervals −π/2 < t < π/2 modπ. These are the two regions
p < 0 and p > 0 into which the phase space (p, q) is divided by the degeneracy
function f(p, q) = p.
1.4 Reducible and irreducible degenerate systems
We have seen that coordinates can be found such that the equations of motion take a
canonical form everywhere within a nondegenerate domain, and don’t seem to have
20

1.4 Reducible and irreducible degenerate systems
any problem; but, can those equations be obtained from an action principle? Can
the dynamical system within a nondegenerate domain be described by a regular,
nondegenerate action principle? Can the action of a degenerate system like (1.1)
be replaced by a nondegenerate action that reproduces the same evolution within a
region that does not contain degeneracies?
The question is whether any of the infinitely many equivalent nondegenerate
descriptions can be obtained from an action principle of the type (1.1). As we will
see next, the answer is negative, as stated in the following
Lemma: Given a generic degenerate system obtained from the action principle
I[z] as in (1.1), none of its nondegenerate analogues can be obtained from a local
action principle I[z]. The only exceptional (non-generic) case in which an action
principle exists for both, degenerate and non-degenerate systems, occurs if the de-
generacy function f(z) is a constant of motion, or equivalently, if the orbits do not
intersect the surface f(z) = 0.
Proof : Suppose there exists an action I[z], for which the equations of motion
are nondegenerate,
zi = εij∂A0(z)
∂zj. (1.44)
Since these equations describe the same degenerate orbits as described, for instance,
in (1.24), then
∂iA0(z) = f−1∂iA0(z) . (1.45)
A fast check of the mixed second partial derivatives shows that
~∇f = ϕ~∇A0 . (1.46)
where ϕ is any scalar function, or equivalently,
εij∂if∂jA0 =f, A0
= 0 . (1.47)
Eq. (1.46) means that the level curves of f and A0 must concide, and (1.47) implies
that f(z) is a constant of motion. In other words, only the action for degenerate
systems whose orbits run tangent to the degenerate surfaces can be replaced by
an action describing a nondegenerate system. We call this type of degeneracy a
reducible one. Irreducible degenerate systems, on the other hand, will be those
whose classical orbits intersect the degenerate surfaces and therefore cannot be de-
scribed by an equivalent nondegenerate action principle. For example, a degenerate
system
f(z)εabzb = Ea(z) (1.48)
21

Classical degenerate systems
Figure 1.8: Example of an irreducible
degenerate system, in the case that the
degeneracy acts as a sink
Figure 1.9: Example of an irreducible
degenerate system, in the case that the
degeneracy acts as a source.
Figure 1.10: Example of an reducible degenerate system, in this case the orbits run
tangent to the degeneracy surface.
is reducible iff ∂af = ϕ(z)Ea(z); otherwise, it is irreducible. This conclusion is rel-
evant for the study of quantum degenerate systems. The point is that, in order to
discuss the quantum mechanics of a particular system, it is not sufficient to have its
dynamical equations, it is necessary to know the action principle that defines it [14]:
As is well known, systems without an action principle –like a damped harmonic
oscillator– do not have a well defined quantum mechanical description.
22

Chapter 2
The quantum problem
2.1 Formalism
As we have seen, irreducible degenerate system cannot be obtained from a non-
degenerate action principle. This means that the quantization of irreducible de-
generate systems is a problem that cannot be addressed following the standard
procedures of quantum mechanics as it applies to nondegenerate systems. The pe-
culiar feature is that the Dirac bracket not only depends on the coordinates, but
moreover, it is undefined on the degenerate surface. When the symplectic structure
degenerates and is no longer invertible, what is the correct approach to define the
quantum theory?
There are two standard constructions of a quantum theory starting from a clas-
sical one: the canonical (Schrodinger) and the path integral. In this chapter, we
analyze the simplest irreducible degenerate system following the first approach and
we will analyze the second one in the Chapter 4.
Let us consider a generic 2-dimensional first order Lagrangian of the form
L(x, y) = Axx+ Ayy + A0 . (2.1)
The Dirac bracket is given by the inverse of symplectic form,
x, y∗ =1
f(x, y), (2.2)
where f(x, y) = ∂xAy − ∂yAx.The phase space coordinates have a noncanonical symplectic structure, and there
is no metric and no preferred coordinate system in the problem. However, since for
irreducible degenerate systems, f has been assumed to be a smooth Morse function
23

The quantum problem
whose level curves do not coincide with the level curves of A0, a natural option would
be to take the value of f as a coordinate, which may be called “x”. The level curves
of Morse functions are either closed or infinitely extended and, in a local patch, the
coordinate lines for x can be identified with the gradient of f .
Quantization still requires finding an adequate prescription of operators such
that the Dirac bracket (2.2) becomes the commutator at the quantum level,
[x, y] = i~1
x. (2.3)
The operators x and y that satisfy this relation can be chosen as
x : = x (2.4)
y : = −i~1
x∂x . (2.5)
The quantum operator H = H(x, y) that replaces the classical Hamiltonian Hc =
−A0(x, y), is a singular differential operator with a leading coefficient 1/x. Still,
given the fact that classically the energy is conserved, (Hc = 0), we expect the quan-
tum Hamiltonian H to have observable real eigenvalues. Consequently H should be
self-adjoint, but this eventually depends on the choice of boundary conditions that
define the Hilbert space.
2.2 The quantum problem: simplest first order
Lagrangian
We illustrate the procedure by analyzing the simplest Lagrangian for which Fij(x) =
xεij. This system, discussed in [1], is obtained for Ax = xy, Ay = 0, A0 = −νy, so
that
L = xyx− νy , (2.6)
H = νy = −A0 , (2.7)
whose degeneracy at x = 0 can be thought of as an approximation near the degen-
erate surface of a generic system. In spite of its simplicity –and possibly unrealistic
nature–, this problem has some interesting features that help to understand more
general cases.
24

2.2 The quantum problem: simplest first order Lagrangian
x
y
infinite velocity
-xo +xo
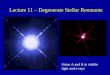
Figure 2.1: Classical orbits x2(t) = 2νt+x20 in the phase space (x, y) for the system
described by L = xyx− νy with ν < 0. For ν > 0 the orbits are time-reversed.
The classical solution is given by [1]
x2(t) = 2νt+ x20 . (2.8)
For ν < 0, the system presents an attractive surface of degeneracy at x = 0 (repulsive
for ν > 0). Note that the orbits flow towards this surface, reaching the degeneracy
with infinite velocity in a finite time. Conversely, for ν < 0, the orbits emerge from
this surface with infinite velocity and go to ±∞ with a velocity that approaches
zero at infinity.
Using the prescription (2.4,2.5) the Hamiltonian operator in this case is
H = νy = −i~ν 1
x∂x . (2.9)
The domain of this singular differential operator must be chosen so that the corre-
sponding Hilbert space will be equipped with a well-defined weighted scalar product.
In general the weighted Hilbert space L2(Ω ⊂ R, w(x) dx)1 consists of (all equiv-
alence classes of) complex-valued functions, defined on a subset Ω of R, that are
1Also denoted as L2(Ω ⊂ R, w(x)) or L2w(Ω ⊂ R).
25

The quantum problem
square-integrable with a weight w(x),
‖ϕ(x)‖ =(∫|ϕ(x)|2w(x) dx
) 12. (2.10)
The weight w(x) is chosen in such a way that the Hamiltonian (2.9) is symmetric,∫ϕ∗1(x)
[Hϕ2(x)
]w(x)dx =
∫ [Hϕ1(x)
]∗ϕ2(x)w(x)dx , (2.11)
up to boundary terms. The symmetry condition together with the positivity of
the scalar product require w(x) = |Fij| = |x|. This is the measure implied by
the noncanonical Dirac bracket (2.2), and is consistent with the presence of the
degenerate surface at x = 0. Hence, the domain where H defines a proper scalar
product is
Do(H) = ψ ∈ L2(R, |x|dx) : H(ψ(x)) ∈ L2(R, |x| dx). (2.12)
The corresponding scalar product and norm in the Hilbert space are
< ϕ1, ϕ2 >=
∫ϕ∗1|x|ϕ2 dx, and ||ϕ|| =
(∫|ϕ|2|x| dx
) 12, (2.13)
respectively.
In this case, the Schrodinger equation reads
− i~ν 1
x
∂
∂xΨ(x, t) = i~
∂
∂tΨ(x, t), (2.14)
which is a singular differential equation with indefinite weight w(x) = x that can
change sign and vanish. 2
The general solution of equation (2.14) is Ψ = ϕ(x2 − 2νt), where ϕ is any
differentiable function. Since the classical system is conservative, the quantum states
ψ can be spanned in a basis of eigenstates of the Hamiltonian (2.9). Hence, a
stationary solution ψ(x, t) is also an eigenstate of H of the form
ΨE(x, t) = ψE(x)αE(t) (2.15)
2As an example, an equation of the Sturm-Liouville type, − ddx
[p(x) dydx
]+ q(x) · y = λw(x) · y,
is a (second order) singular equation with weight w(x). This operator is self-adjoint in the Hilbertspace L2(Ω ⊂ R, w(x) dx), but usually considering only regions for which w(x) is positive. Thetypical example of a differential equation of mixed type studied in intervals where a coefficient canchange sign is given by the Tricomi equation uxx + xuyy = 0: depending on on the sign of x thisequation changes between elliptic, hyperbolic or parabolic type [36].
26

2.3 Dealing with the degeneracy
with
ψE(x) = ψ0 ei~E2νx2
and αE(t) = α0 e− i
~Et, (2.16)
where E= constant is an eigenvalue of H.
The crucial point now is the choice of the domain where the Hamiltonian op-
erator is self-adjoint. Let’s stress that for unbounded (linear) operator, as H, self-
adjointness and symmetry may not coincide depending on the domain. In practice,
the process to establish the self-adjointness requires the symmetry condition (see
Appendix B). In our case, H = −i~ν x−1∂x, is self-adjoint provided the functions
in the Hilbert space Do(H) satisfy appropriate boundary conditions, depending on
whether the domain includes the degeneracy or not.
2.3 Dealing with the degeneracy
In the presence of the divergence at x = 0, the Schrodinger equation (2.14) can be
solved by either restricting the domain so as to exclude the origin, or by imposing
some additional boundary conditions involving the values of ψ at x = 0±. The latter
option is a subtle issue in view of the first order nature of equation (2.14).
2.3.1 Excluding the degeneracy: x ∈ (0, a)
A simple possibility is to consider the domain (0, a), in which case, the normalized
stationary states are
ΨE(x, t) =
√2
aexp
[iE
2~ν(x2 − 2νt)
]. (2.17)
This solution is even in x and never vanishes in the range, although its domain
of definition does not include x ≤ 0. The equation is separable and therefore, the
solution can be factorized as Ψ(x, t) = ψ(x)α(t). In order to evaluate the self-
adjointness we first consider the symmetry condition,
< Hψ, φ >=< ψ, Hφ > ∀ψ, φ ∈ D(H), (2.18)
that reduces to
ψ∗(a)φ(a)− ψ∗(0+)φ(0+) = 0. (2.19)
It then follows that the operator H is self-adjoint in the space of functions which
differ by an arbitrary but fixed phase θ at the end points of the domain, ψ(a) =
27

The quantum problem
eiθψ(0+),
< ψ, Hφ >=< H†ψ, φ >,
∀ψ, φ ∈ D(0,a)(H) ≡ D(0,a)(H†) , (2.20)
where
D(0,a)(H) = L2((0, a), |x|dx) : ψ(a) = eiθψ(0+) 6= 0. (2.21)
Hence, the eigenfunctions
ψE(x) =
√2
aexp
[iE
2~νx2
](2.22)
form a complete orthonormal basis spanning the space D(0,a)(H).
The parameter θ must be the same for all the functions in the Hilbert space.
Different choices of θ give rise to different Hilbert spaces which, however, describe
equivalent physical systems. Hence, changing the value of θ has no effect on the
energy differences between states, or on the matrix elements < Ψ1(x, t)MΨ2(x, t) >
for any operator M (e.g., in the probability amplitude). Without loss of generality,
θ can be set to zero, which implies the added symmetry Ψ∗n = Ψ−n among the energy
eigenstates.
The boundary condition in (2.21) implies a discrete energy spectrum,
En :=2ν~a2
(2nπ + θ) =4πν~na2
+2ν~a2
θ, n ∈ Z and θ ∈ [0, 2π] (2.23)
En − Em := ∆E =4πν~a2
(n−m) (2.24)
The parameter θ produces a shift of energy levels by the constant ∆E = 2ν~θ/a2,
which can be seen as the effect of putting the system in an environment at a constant
potential [15]. Thus, the energy eigenstates are described by the wave functions
Ψn,θ(x, t) =
√2
aexp
[i2nπ + θ
a2(x2 − 2νt)
], (2.25)
and the general solution in the interval (0, a) is Ψ(x, t) =∑cnΨn,θ(x, t), with the
coefficients cn given by
cn =< Ψn,θ(x, t)|Ψ(x, t) >=
∫ a
0
Ψ∗n,θ(x, t)Ψ(x, t)x dx (2.26)
which are determined by the initial condition Ψ(x, 0) = ψ0(x).
28

2.3 Dealing with the degeneracy
The energy spectrum En is unbounded below because the are no restrictions on
the values of n ∈ Z as seen in (2.23). This is due to the first-order character of the
Schrodinger operator in this case. Thus, the spectrum of this Schrodinger equation
is analogous to the Dirac case, where the negative energy states are interpreted
as anti-particles states going backwards in time. Here, the energy eigenvalues En
remain unchanged under simultaneous reversal of n and ν,
En,ν = −E−n,ν = −En,−ν = E−n,−ν . (2.27)
Hence, the negative values of E correspond to the states of a system where ν has
the opposite sign, passing from a system of attractive character to a repulsive one
or vice-versa, which are precisely the time-reversal of each other.
2.3.2 Probability density
The probability of finding the state in a configuration around x is given by
P (x < x′ < x+ dx, t) = |Ψ(x, t)|2|x|dx, (2.28)
which is the same for all n and any value of θ,
Pn,θ(x < x′ < x+ dx, t) = |Ψn,θ(x, t)|2|x|dx =2
a2|x|dx . (2.29)
The probability density is ρ(x, t) = |Ψ(x, t)|2|x|. The conservation of probability
of finding a particle anywhere in the interval 0 < x < a is ensured by the continuity
condition obtained multiplying the Shcrodinger equation by xΨ∗(x, t),
∂tρ+ ∂xJ = 0 , (2.30)
where J = ν|Ψ(x, t)|2. The behaviour of the quantum probability density follows
the classical pattern: for a particle moving according to x2(t) = 2νt + x20, the
probability P (x)dx ∝ dt = dx/|v| (where v is the velocity) can be calculated using
the fact that v = ν/x and requiring the probability to be normalized in the interval,∫ a0P (x)dx = 1. The result is
Pclass(x) =2
a2|x| , (2.31)
which indicates that the probability of finding a particle decreases linearly with x.
Additionally, for ν < 0 J = ν|Ψ(x, t)|2 represents a constant flux towards x = 0.
29

The quantum problem
2.3.3 Example: a wave packet
Ideally one can prepare the system in an initial state that describes a particle local-
ized in an interval and study its evolution: how long does it take for a generic state
to be absorbed? At which rate does the source absorb particle-like waves? In order
to address these issues, one can consider a state can prepared as
ψ(x) =
0 0 < x < x1
k x1 ≤ x ≤ x2
0 x2 < x < a
, (2.32)
and normalized,
||ψ(x)||2 =
∫|ψ(x)|2|x|dx = k2 x
22 − x2
1
2= 1 , k =
√2
x22 − x2
1
. (2.33)
This state can be spanned in the basis (2.25)
ψ(x) =n=∞∑n=−∞
cnψn(x) , (2.34)
where cn =< ψn(x)|ψ(x) >=∫ a
0
√2ae−i
2nπa2
x2
|x|ψ(x)dx. substituting (2.32), yields
cn = iak√2nπ
[e−i
2nπa2
x22 − e−i
2nπa2
x21
]and therefore,
ψ(x) =n=∞∑n=−∞
ik
2nπ
[ei
2nπa2
(x2−x21) − ei
2nπa2
(x2−x22)]. (2.35)
This state evolves as
ψ(x, t) =n=∞∑n=−∞
ik
2nπ
[ei
2nπa2
(x2−x21−2νt) − ei
2nπa2
(x2−x22−2νt)
](2.36)
It is clear that this is a wave packet with constant profile rigidly moving towards
the origin (for ν < 0) or towards the x = a value (for ν > 0).
ψ(x) =
0 0 < x <
√x2
1 + 2νt
k√x2
1 + 2ν ≤ x ≤√x2
2 + 2νt
0√x2
2 + 2νt < x < a
(2.37)
30

2.3 Dealing with the degeneracy
x
Wave Function
ax1 x2
Figure 2.2: Evolution of a sharply wave packet localized as in (2.32), with ν < 0.
One can say that this wave translates rigidly with the law
x(t) :=√x2(0) + 2νt (2.38)
After a maximum time t = a2/2|ν| the wave is totally absorbed at x = 0 (or at
x = a in the repulsive case).
2.3.4 Including the degeneracy: x ∈ (a−, a+), a− < 0 < a+
We now examine the Schrodinger equation (2.14) in an interval that extends across
the surface of degeneracy. The idea is to describe a situation in which both the initial
and the final states can be on either side of x = 0, in order to explore the possibility
of tunnelling across the degeneracy surface. The difficulty is not so much to find
the space of solutions in the interval (a−, a+), with a− < 0 < a+, –in other words,
a Hilbert space L2((a−, a+), |x|dx)– but to make sure that H is self-adjoint in that
space of solutions. In fact, the solution analogous to the previous case, normalized
in this domain with measure |x|dx, is
ψE(x) =
√2
(a−)2 + (a+)2exp
[iE
2~νx2
], (2.39)
31

The quantum problem
which reduces to (2.17) for a− = 0, a+ = a. The condition (2.19) for the symmetry
of H, however, is replaced by the requirement,3
ψ∗(a−)φ(a−)− ψ∗(0−)φ(0−)− ψ∗(0+)φ(0+) + ψ∗(a+)φ(a+) = 0. (2.40)
The Hamiltonian operator H = −i~x−1∂x is singular at x = 0 and hence, the
wave function need not be defined there. The correct definition of the domain is not
the continuous interval (a−, a+), but rather (a−, 0) ∪ (0, a+), and the wavefunction
ψ(x) is allowed to be discontinuous at x = 0. Therefore, we look for solutions
that are everywhere bounded but not necessarily continuous at x = 0, where they
can present a (finite) discontinuity. This kind of functions belong to the class of
piecewise continuous function and they are not almost everywhere continuous. This
means, in particular, that (2.40) must be interpreted as two separate statements,
ψ∗(a−)φ(a−) = ψ∗(0−)φ(0−) and ψ∗(a+)φ(a+) = ψ∗(0+)φ(0+), (2.41)
and the results of the previous section be can expected to hold for both intervals
(a−, 0) and (0, a+) separately.
The self-adjoint condition for H must be respected in both domains, so the
wavefunctions must satisfy the following boundary conditions
ψ(a−) = eiθ−ψ(0−), and ψ(a+) = eiθ
+
ψ(0+) . (2.42)
This in turn implies that the Hilbert space splits into two subspaces H±
H− = φ(x) ∈ L2((a−, 0), |x|dx) : φ(a−) = eiθ−φ(0−) (2.43)
H+ = φ(x) ∈ L2((0, a+), |x|dx) : φ(a+) = eiθ+
φ(0+) , (2.44)
where in general φ(0−) 6= φ(0+). This shows that the quantum problem in a region
that extends across a degenerate surface reduces to the previous case on the disjoint
sets (a−, 0) and (0, a+), and the Hilbert space splits into a direct sum
H = H− ⊕H+, (2.45)
where H− = L2((a−, 0), |x|dx) and H+ = L2((0, a+), |x|dx) are mutually orthog-
onal projections of L2((a−, a+), |x|dx) on the intervals (a−, 0) and (0, a+). These
3This condition appears because the weight |x| in the scalar product (2.13) splits the integral,
< ψ, Hφ >=∫ a+
a−ψ∗|x| (Hφ) dx = −
∫ 0
a−ψ∗x(Hφ)dx+
∫ a+
0ψ∗x(Hφ)dx.
32

2.3 Dealing with the degeneracy
projections can be implemented through the action of the operator P , defined as
P : f(x) 7→ sgn[x] · f(x), and
H± =1
2(P ± 1) · L2((a−, a+), |x|dx) . (2.46)
In this splitting, the support of each function space is restricted to either one side
or the other, and the wave functions are
ψ =
(ψ+(x)
ψ−(x)
)= ψ+(x)⊕ ψ−(x), (2.47)
where
ψ−(x) =
√2
a−exp
[i
2~νE−n x
2], a− < x < 0
0 , 0 < x < a+(2.48)
ψ+(x) =
0 , a− < x < 0√
2a+ exp
[i
2~νE+n x
2], 0 < x < a+
(2.49)
These are admissible solutions of the Schrodinger equation,
Hψ± = E±ψ± (2.50)
where the eigenvalues E± are found to be
E±n = (2nπ + θ±)2~ν
(a±)2. (2.51)
The Hamiltonian takes a block-diagonal form, each block having its own spectrum
E±n . The complete energy spectrum is the union of the two spectra
En = E+n ∪ E−n . (2.52)
Some eigenvalues could have a matching one on the other side, i.e. E+n = E−m, then
n =
(a+
a−
)2
m+ κ , (2.53)
where κ = [(a+)2θ− − (a−)2θ+]/[2π(a−)2]. As in the previous case, changing the
energy spectrum by a constant corresponds to an equal shift in the phases of all
wave functions, θ± → θ± + δθ with no observable effects. This freedom can be used
to set κ = 0, so that the ground states on both sides (n = 0 = m) have the same
energy. In that case, we can distinguish three possibilities:
33

The quantum problem
x
Pro bability de ns ity fo r e ige ns tate s
a+
a-
Figure 2.3: Probability density for the energy eigenstates (2.48,2.49) in (a−, a+).
• If (a+/a−)2 is a generic irrational number, the two spectra have only one
common eigenvalue –a doubly degenerate ground state–
• If (a+/a−)2 takes a rational value, there are some doubly degenerate eigenstates
and the rest are nondegenerate
• In the extreme case a symmetric domain, a+ = a−, all states are doubly
degenerate.
The general time-dependent solution reads
Ψ(x, t) =
∑c−m√
2a−
exp [2πim(x2 − 2νt)(a−)−2] , x ∈ (a−, 0)
∑c+n
√2
a+ exp [2πin(x2 − 2νt)(a+)−2] , x ∈ (0, a+)
(2.54)
where the coefficients are given as before
c−m = < Ψn(x, t)|Ψ(x, t) >=
∫ 0
a−Ψ∗n(x, t)|x|Ψ(x, t) dx
c+n = < Ψm(x, t)|Ψ(x, t) >=
∫ a+
0
Ψ∗m(x, t)|x|Ψ(x, t) dx
34

2.4 Tunneling: equation of continuity
2.4 Tunneling: equation of continuity
Note that there is no overlap between wavefunctions with support on opposite sides
of the degeneracy surface. Consequently, a wave packet initially prepared in the
region x < 0 will never evolve into x > 0, and vice-versa. This is in complete
agreement with the classical behaviour of the system whose orbits never extend to
the other side of a degeneracy surface. In other words, there is neither classical nor
quantum flow across the degeneracy surface.
The term |x| in the probability density ρ(x, t) = |Ψ(x, t)|2|x| reflects the role
of the degeneracy as a singularity of the probability flow, where particle states are
created or annihilated. In fact, the quantum mechanical probability density satisfies
a continuity equation with a sink (or source) at the degeneracy,
∂tρ+ ∂xJ = σ , (2.55)
where
ρ(x, t) = |Ψ(x, t)|2|x| (2.56)
J(x, t) = ν sgn(x) |Ψ(x, t)|2 (2.57)
σ(x, t) = 2ν δ(x) |Ψ(x, t)|2. (2.58)
The direction of the flow is determined by the sign of ν and the degeneracy at
x = 0 acts as sink (ν < 0) or source (ν > 0) of states. As seen in (2.58), there is a
delta function supported at the discontinuity of the wave function that acts as this
source or sink of particles (see Appendix).
Let us analyze the continuity equation, both in the case in which the degeneracy
is excluded, 0 < x < a, and included, x ∈ (a−, a+) with a− < 0 < a+. Integrating
the continuity equation (2.55) over the interval 0 < x < a, the source term does not
contribute and therefore∫ a
0
∂
∂tρ(x, t) dx+
∫ a
0
∂
∂xJ(x, t) dx = 0 (2.59)
and denoting with P (t) the total probability∫ρ(x, t) dx we have
d
dtP (t) + J(x, t)
∣∣∣a0
= 0 (2.60)
d
dtP (t) + ν sgn(x) |Ψ(x, t)|2
∣∣∣a0
= 0 (2.61)
d
dtP (t) + ν
[|Ψ(a, t)|2 − |Ψ(0, t)|2
]= 0 (2.62)
35

The quantum problem
finally, imposing the boundary condition Ψ(a, t) = Ψ(0, t)eiθ one gets
d
dtP (t) = 0 for x ∈ (0, a) , (2.63)
which means that the probability of finding the particle inside the interval that
excludes the degeneracy is constant.
On the other hand, integrating the continuity condition over the interval (a−, a+)
contributions from the source (sink) cannot be ignored,∫ a+
a−
∂
∂tρ(x, t) dx+
∫ a+
a−
∂
∂xJ(x, t) dx =
∫ a+
a−σ(x, t) dx . (2.64)
The current density is a continuous function except for a jump ∆ at x = 0,
∆ = J(0+, t)− J(0−, t) = ν|ψ(0+, t)|2 + ν|ψ(0−, t)|2 . (2.65)
Its derivative gives a delta at the jump that exactly matches that of the source.
Then the results are (see Appendix)∫ a+
a−
∂
∂xJ(x, t) dx =
∫ a+
a−
∂
∂x
(ν sgn(x) |Ψ(x, t)|2
)x6=0
+
∫ a+
a−∆ · δ(x) =
= ν[|Ψ(a−)|2 + |Ψ(a+)|2
]=
∫ a+
a−σ(x, t) dx . (2.66)
So the continuity equation (2.64) integrated over the interval (a−, a+) reads
d
dtP (t) = 0 (2.67)
For the interval (a−, a+) the total probability density is conserved: given the bound-
ary conditions (2.41), the flux entering (leaving) from the endpoints a− and a+ is
absorbed (suplied) by the degeneracy surface. Once more this shows that imposing
boundary condition that make H self-adjoint results in conservation probability and
there is no net flux of the wave packet across the degeneracy in any case.
36

Chapter 3
Coupled system
An important feature of a degenerate system is that the degeneracy generically
affects a two-dimensional submanifold of the phase space. This means that in a
degenerate system there usually coexist coupled degenerate and a non-degenerate
subsystems. Next, we analyze quantum-mechanically this situation, which had been
previously discussed in a classical context in [1].
3.1 General classical solution
The next step is to study the quantum behaviour of a coupled system: what is the
fate of two systems, a regular one and a degenerate one, when they interact? Some
important questions arise: can the two systems influence each other to the point of
cancelling or amplifying the effects or characteristics of the degeneracy? Could it
happen that once the degenerate system collapses on the surface of degeneracy, the
regular system continues to evolve in a form that certain information can overcome
the ”barrier”? Would this tunnelling effect depend on the type of coupling?
We first summarize what is known at classical level for a simple coupled system
with a Lagrangian of the form [1],
L(xα, za, xα, za) = LDEG(xα, , xα) + LREG(za, za)− Vλ(xα, za) α = 1, 2, a = 1, 2
(3.1)
where the coordinates xα refer to the degenerate system, while za refer to the regular
system. For our purposes the Lagrangians are written in their first order version,
where
LDEG = Aα(x)xα −HDEG(x), (3.2)
37

Coupled system
describes a 2-dimensional system that degenerates at a surface described by f(xα) =
0 (see Chapter 1.2), that is f(x, y) = ∂xAy(x, y)−∂yAx(x, y) = 0. On the other hand
LREG describes a 2n-dimensional regular system with a corresponding Hamiltonian
HREG(za)
LREG(z) = paza −HREG(z), a = 1, ..., 2n (3.3)
The interacting term plays the central role, a possible simple choice is to write a
coupling that does not change the character of the degeneracy surface, i.e. a coupling
that vanishes at the degeneracy as in
Vλ(xα, za) = λf(xα)HREG(za) (3.4)
Finally the complete Lagrangian reads
L = Aαxα −HDEG(x) + pza −HREG(z) + λf(xα)HREG(za) α = 1, 2, a = 1, 2 (3.5)
Here Vλ depends on a constant parameter λ, it vanishes at the degeneracy surface
and does not change the flux density there (note that this coupling would be trivial
in case of nondegenerate systems). Classically such coupling allows the degenerate
system to evolve until it reaches the degeneracy surface, while the regular system
evolves as in the decoupled case but with a reparametrized time τ(t). Once the
degeneracy is reached, both time coordinates become identical (τ = t), all traces
of the degenerate system disappear, the regular system evolves undisturbed and
the solution thereafter contains no traces of the initial conditions of the degenerate
subsystem.
The equations of motion areza =
[1 + λf(x)
]F ab∂bHREG(za)
εαβf(x)xβ = ∂α
[HDEG(xα) + λf(x)HREG(z)
] , (3.6)
where F ab is the inverse of the regular (canonical) symplectic form. The first equa-
tion in (3.6) implies that the regular Hamiltonian HREG is independently conserved
HREG = za ∂aHREG(z) = 0.
This permits to solve the equations of motion for the degenerate part in the xα(t)
coordinates, independently from the regular subsystem,
εαβf(x)xβ =[∂αHDEG(x) + λHREG(z)∂αf(x)
]. (3.7)
38

3.1 General classical solution
The solution xα(t) can be put back in the first equation (3.6) to confirm that the
regular system describes the same orbit as in the decoupled case, with a reparametrized
time
za(t) =dza
dτ
dτ
dt= F ab ∂bHREG(z)
[1 + λf
(x(t)
)], (3.8)
dτ
dt= 1 + λf
(x(t)
), (3.9)
and finally the equation of motion for the regular part becomes
za(t) = zaλ=0
(τ(t)
). (3.10)
In particular, the coupling between the simplest degenerate system L = xyx−νywith f(x, y) = x, as discussed in (2.6), and a harmonic oscillator gives [1]
L = LDEG(x, y) + LREG(p, q) + λf(x, y)HREG(p, q)
= xyx− νy + pq − 1
2(1 + λx)(p2 + q2) (3.11)
with ν < 0. In this case the degenerate subsystem collapses to x = 0 in a finite
time. The four equations of motion read
xy = −1
2λ(p2 + q2) (3.12)
xx = ν (3.13)
p = −(1 + λx) (3.14)
q = (1 + λx) . (3.15)
From equations (3.14) and (3.15) it is clear that p2 + q2 = constant. Hence from
(3.12) and (3.13) the orbits in the (x, y) plane are straight lines
The solutions are
x2(t) = 2νt+ x02, 0 < t < x2
o
2|ν| (ν < 0)
x(t) = 0, t < to
y(x) = −12λν(p2
0 + q20)x+ y0
y(x) = yo, t < to
p(τ) = p0cos (τ + φ0)
q(τ) = q0sin (τ + φ0)
, (3.16)
39

Coupled system
where τ = t+ λ3ν
[2νt+ x2o]
3/2.
This means in particularx(t) = ±
√2νt+ x2
o for t < x2o
2|ν|
x(t) = 0 for t > x2o
2|ν|
(3.17)
with
τ(t) = t+λ
3ν(2νt+ xo
2)3/2 for 0 < t < .x2o
2|ν|= to (3.18)
This shows that the orbits in the (q, p) plane are circles that are traced at a speed
that changes in time for 0 < t < to = x2o/2|ν|. Once the degenerate system collapses
for t ≥ xo2/2ν, the harmonic oscillator evolves with time τ = t.
3.2 Quantum coupled system
Let us now study the quantum behaviour of the same simple degenerate system
discussed in Section 2.2, coupled to a harmonic oscillator,
L = xyx− νy + pq − 1
2(p2 + q2)− 1
2λx(p2 + q2) (3.19)
The corresponding Hamiltonian operator is
Hc = νy +1
2(1 + λx)(p2 + q2) , (3.20)
The proposed quantization prescription is
q : = q (3.21)
p : = −i~∂q (3.22)
x : = x (3.23)
y : = −i~1
x∂x . (3.24)
These operators are defined on the Hilbert space of function of two variables
(x, q), whose scalar product, according to previous Chapter 2 should be
< f(x, q)|g(x, q) >:=
∫f(x, q) g(x, q) |x| dx dq . (3.25)
The Hamiltonian operator is time independent and reads
Hc = −i~ν 1
x
∂
∂x+
1
2(1 + λx)(−~2 ∂
2
∂q2+ q2) . (3.26)
40

3.2 Quantum coupled system
The Schrodinger equation
Hcψ(x, q, t) = i~∂
∂tψ(x, q, t) (3.27)
is separable and the solutions can be factorized as ψ(x, q, t) = u(x, q)φT(t), and
1
u(x, q)H(u(x, q)
)= i~
1
φT(t)
d
dtφT(t) . (3.28)
Equating both sides to a constant W gives
i~1
φT(t)
d
dtφT(t) = W (3.29)
1
u(x, q)H(u(x, q)
)= W . (3.30)
As usual, the constant W plays the role of the total energy of the system. The first
equation has the typical solution φT(t) ∝ exp(− i~Wt). The second is the eigenvalue
equation for H
H(u(x, q)
)= Wu(x, q) , (3.31)
where W represents allowed values of total energy of the coupled system. According
to (3.26), (3.31) is the differential equation
− i~ν 1
x
∂
∂xu− 1
2~2 ∂
2
∂q2u− 1
2~2λx
∂2
∂q2u+
1
2q2 u+
1
2λx q2 u = Wu (3.32)
We look for factorized solutions u(x, q) = φD(x) · φR(q), where the labels D and
R stand for “degenerate” and “regular”
φR(q)[− i~ν 1
x
∂
∂xφD(x)
]+
1
2(1 + λx)φD(x)
[− ~2 ∂
2
∂q2+ q2
]φR(q) = WφD(x)φR(q) .
(3.33)
Dividing by (1 + λx) · φD(x) · φR(q) one obtains1
1
φR(q)
1
2
[− ~2 d2
dq2+ q2
]φR(q) = i~ν
1
x(1 + λx)
1
φD(x)
d
dxφD(x) +
W
1 + λx. (3.34)
Here each side should be equal to a constant, ER,12
[− ~2 d2
dq2+ q2
]φR(q) = ER φR(q)
i~ν 1x(1+λx)
1φD(x)
ddxφD(x) + W
1+λx= ER .
(3.35)
1The condition (1 + λx) 6= 0 is assumed here because otherwise the Hamiltonian (3.20) wouldmerely describe the purely degenerate system already discussed in previous sections.
41

Coupled system
The first is clearly the eigenvalue equation for a normal harmonic oscillator2 whose
solutions are
φRn (q) = NnHn(q)e−12q2 , ER
n = ~ω(n+1
2) , (3.36)
with q ∈ (−∞,∞), φRn (q) → 0 for q → ±∞. Here Nn is a normalization constant
and Hn is the nth Hermite polynomial.
The second equation in (3.35) is still separable and can be written as
1
φD(x)
d
dxφD(x) =
i
~ν[Wx− ERx(1 + λx)
], (3.37)
which is similar to the simplest degenerate case we have already studied, corrected
by the term −ERx(1 + λx). Its integral is
φD(x) = φ0exp
[i
2~ν
[(W − ER
n
)x2 − 2
3λERx3
]]. (3.38)
The main difference between this solution and that of the quantum degenerate
system discussed before is the term x3, that apparently has no classical counterpart,
but as we will show, it can be interpreted in the context of the harmonic oscillator.
For λ = 0, the Hamiltonian (3.20) describes a decoupled system, whose total
energy W is simply the sum of the energy of its two subsystems, W = ER + ED.
Then W − ERn = ED is the energy of a degenerate system in the presence of a
(decoupled) harmonic oscillator .
In order to write down completely the factorized solution ψW(x, q) = φD(x)φR(q),
the differential equation (3.30) should be solved with some boundary condition that
makes the Hamiltonian operator self-adjoint. The symmetry condition
< ϕ1, Hϕ2 >=< ϕ2, Hϕ1 >∗,
plus the condition of self-adjointness for H = HDEG +(1+λx)HOSC require boundary
conditions for ψW(x, q) that are the intersection of the boundary conditions that
make self-adjoint separately HDEG and HOSC, each one in its proper domain.
This happens because (1 + λx) term is real
< g |H(f) >=< g |HDEG(f) > + < g |(1 + λx)HOSC(f) > (3.39)
< H†(g)|f >=< H†DEG(g)|f > + < (1 + λx)H†OSC(g)|f > (3.40)
2In the coupled Hamiltonian (3.20) we assumed ω = 1.
42

3.2 Quantum coupled system
So, using the usual harmonic oscillator’s boundary condition and recovering previous
results (2.42) for the degenerate system (for a− < 0 < a+)
q ∈ (−∞,∞) with φRn (q)→ 0 for q → ±∞ (3.41)
x ∈ (a−, a+) with φD
W (a−) = φD
W (0−) and φD
W (a+) = φD
W (0+) (3.42)
the Hamiltonian H = HDEG + (1 + λx)HOSC is self-adjoint. The energy spectrum is
given by
Wk,n =4πk~νa2
+ ERn +
2
3λaER
n , (3.43)
where ERn = ~ω(n + 1
2). This spectrum coincides with the perturbative correction
for the Hamiltonian HDEG + HOSC produced by a perturbation given by λ · xHOSC.
Here 4πk~ν/a2 +ERn is the energy of the decoupled system composed by degenerate
system and a harmonic oscillator, and 23λER
n a is the first and only correction to the
energy (the same for every level).
We observe that for λ = − 32a
the coupling energy and the harmonic oscillator
energy cancel out and the total energy does not depend on n: regardless of the
state of harmonic oscillator the total energy is exactly the energy of the degenerate
system.
The complete wave function ψ(x, q, t) = φR(q)φD(x)φT(t) reads
ψk,n(x, q, t) = ψ0 ei~
12ν
[(Wk,n−ERn
)x2− 2
3λERn x
3
]φRn (q) e−
i~Wk,nt , (3.44)
that can also be written as
ψk,n(x, q, t) = ψ0 exp
i
~1
2ν
[4kπ~νa2
+2
3λa ~ω
(n+
1
2
)](x2 − 2νt)
(3.45)
×NnHn(q)exp
− 1
2q2 − iω
(n+
1
2
)[t+
1
3
λ
νx3
]This describes a degenerate system whose energy levels are corrected by the en-
ergy levels of harmonic oscillator, 23λa~ω(n+ 1
2), and the harmonic oscillator has a
reparametrized time τ(t) = t+ 13λνx3. As usual, ψk,n(x, q) must be properly normal-
ized, ∫ ∫|ψ(x, q, t)|2 |x| dx dq = 1 . (3.46)
The most general solution is
ψk,n(x, q, t) =∑n≥0,∀k
ck,n φD
k,n(x, t)φR
n(q, t) , (3.47)
43

Coupled system
and as the sum runs over n and k, this general wave function cannot be expressed
as the product of a degenerate and a regular wave function.
44

3.3 Continuity equation
3.3 Continuity equation
Until now we have shown that the dynamics of the degenerate system is not altered
by the coupling, only its energy levels are displaced by a constant gap, while the
harmonic oscillator is more conditioned in his evolution, with reparametrization in
time: what are the consequences in the continuity equation? To answer this it is
natural to define first the following quantities
• total probability density: ρ(x, q, t) := |ψ(x, q, t)|2|x|
• degenerate probability density: ρD(x, t) :=∫|ψ(x, q, t)|2|x|dq
• regular probability density: ρR(q, t) :=∫|ψ(x, q, t)|2|x|dx
where ψ stands always for the most general wave function ψ(x, q, t) .
Even if the general wave function can not be factorized into a degenerate and a
regular part, the densities ρD(x, t) and ρR(q, t) can be related as usual to some
square amplitudes. So, let’s tentatively define
ρD(x, t) =
∫|ψ(x, q, t)|2|x|dq = |x|
∫|ψ(x, q, t)|2dq =: |x||ϕD(x, t)|2 (3.48)
ρR(q, t) =
∫|ψ(x, q, t)|2|x|dx =: |ϕR(q, t)|2 (3.49)
As expected from the definition previously given in (2.28), the so-called degenerate
part |ϕD(x, t)|2 of the wave is not dimensionally function a probability amplitude
density by itself, it misses the |x| factor to be the proper probability amplitude in
the degenerate Hilbert space.
From the Schrodinger equation in (3.26) and in (3.27), the continuity equation is
∂
∂tρ(x, q, t) +
∂
∂xJx(x, q, t) +
∂
∂qJq(x, q, t) = 2νδ(x)|ψ|2 , (3.50)
where
• total current density:−→J (x, q, t) =
(Jx(x, q, t), Jq(x, q, t)
)• Jx(x, q, t) = νsgn(x)|ψ|2
• Jq(x, q, t) = (1 + λx)|x| i~2m
[ψ ∂∂qψ∗ − ψ∗ ∂
∂qψ]
45

Coupled system
Moreover let’s define
• degenerate current density: JD(x, t) =∫Jx(x, q, t)dq
• regular current density: JR(q, t) =∫Jq(x, q, t)dx
Integration over x in the interval (0, a) or (a−, a+) gives (for the integration involving
the terms Jx(x, q, t) and 2ν δ(x)|ψ| see the Appendix B)
∫∂
∂tρ(x, q, t)dx+
∫∂
∂xJx(x, q, t)dx+
∫∂
∂qJq(x, q, t)dx =
∫2νδ(x)|ψ|2dx ,
(3.51)
∂
∂tρR(q, t) +
∂
∂qJR(q, t) = 0 . (3.52)
This equation nearly recover the typical harmonic oscillator result with the quanti-
ties ρR(q, t) and JR(q, t) defined above
∂
∂tρR(q, t) +
∂
∂q
i~2m
∫ a
0
(1 + λx)[ψ∂
∂qψ∗ − ψ∗ ∂
∂qψ]|x|dx = 0 . (3.53)
For an eigenstate of the system as written in (3.44) this regular part reads
∂
∂tρR(q, t) +
(a2
2+ λ
a3
3
)∂
∂q
i~2m
[φR
n
∂
∂qφR ∗n − φR
n
∂
∂qφR∗n
]= 0 , (3.54)
ρR(q, t) = |φR
n(q, t)|2 =(NnHn(q)e−
12q2)2. (3.55)
On the other hand integration over q ∈ (−∞,∞) gives
∫∂
∂tρ(x, q, t)dq +
∂
∂x
∫Jx(x, q, t)dq +
1
2(1 + λx)|x|
∫∂
∂qJq(x, q, t)dq =
2νδ(x)
∫|ψ(x, q, t)|2dq ,
∂
∂tρD(x, t) +
∂
∂xJD(x, t) = 2νδ(x)|ϕD(x, t)|2 . (3.56)
As one can easily compare with first equations of Section 2.4, this is the same result
obtained for a singular degenerate system described by a wave function ϕD(x, t) with
density ρD(x, t) = |ϕD(x, t)|2|x| and with current JDx (x, t) = νsgn(x)|ϕD(x, t)|2. The
dynamics of the degenerate systems is as before (up to a constant in the energy),
so for ν < 0 (or ν > 0 ) the wave evolves towards x = 0 (or away from x = 0)
independently from the evolution of harmonic oscillator: for this coupled system
described by (3.20) there is no net flux across the degeneracy.
46

Chapter 4
Path integral
In the previous chapters we have followed the more conventional way to quantize a
classical system: the canonical quantization method. In this method the Hamilto-
nian governs the dynamics through a differential point of view: once the quantum
Hamiltonian operator is constructed the differential Schrodinger’s equation dictates
the time development of a system. This is in contrast with the global point of view
based on the action principle: among all the possible evolution (paths) between to
points at two distinct times, classically the system follows the path that extremizes
the action S =∫L(z, z, t) dt. The quantum counterpart of this approach resides
in the famous method developed by Feynman [24] [25], based on the Dirac’s ideas
that Lagrangians have a fundamental role in quantum formulation [26]. Feynman
constructed for quantum mechanics a generalization of the action principle via the
so-called path integral formulation: if in classical mechanics only matters the par-
ticular trajectory that extremizes the action functional, in the quantum version all
the paths contribute.
In this chapter we will investigate the quantization through the path integral
formulation of the same simple example L = xyx− νy we have already analised in
Chapter 2 with canonical quantization.
4.1 Propagator
In this approach a system classically governed by the generic action S[x; t1, t2] =∫ t2t1L (x(t), x(t), t) dt has a probability amplitude to evolve between two prescribed
points at two distinct instants of time given by
47

Path integral
K(x2, t2;x1, t1) = A
∫Dx(t) e
i~S[x;t1,t2] , (4.1)
where the measure of integration Dx(t) is over all possible continuous trajectories in
configuration space joining initial and final point x1 and x2, and A is a normalization
factor. The above expression K(x2, t2;x1, t1) is called path integral.
Eventually the measure can be realized by dividing the possible path in N in-
finitesimal time intervals and then realizing the integration as a product of integra-
tion over each individual i-th interval keeping fix the initial (i = 0) and final (i = N)
points
Dx = limN→∞
N−1∏i=1
dx(ti) . (4.2)
Considering the action in Hamiltonian form, S[p, q; t1, t2] =∫ t2t1
[pq −H(p, q)] dt,
the path integral is a sum over all possible trajectories in phase space, this permits
to consider a wider class of dynamical systems, e.g. those with constraints without
standard symplectic structures ( [37], [38], [39]). With general coordinates (p, q) = zi
with i = 1, ...2n the action functional reads
K(z2, t2; z1, t1) =
∫Γ
Dω(z) exp
i
~S[z; t1, t2]
, (4.3)
where the integral measure takes into account the symplectic structure F ij = [zi, zj]
of the phase space Γ
Dω(z) =∏
(det[F (z)])1/2 dz(ti) . (4.4)
For the simple degenerate system we have studied in Chapter 2.2 described by
the Lagrangian L = xyx− νy , we can explicitly write the propagator through (4.3)
K(xf , tf ;xi, ti) =
∫Γ
DyDxei~∫
(xyx−νy)dt . (4.5)
We discretize the Lagrangian slicing the time interval (ti, tf ) into N intervals
of magnitude ε, then we take the limits N → ∞ and ε → 0. Accordingly the
x (position) and y (momentum) coordinates will be discretized as x → xn−xn−1
2,
x→ xn−xn−1
ε, y → yn with x0 as initial point and xN as final point.
The Hamiltonian action will read
48

4.1 Propagator
S = limε→0N→∞
i
~ε
N∑n=1
(xn − xn−1
2· yn ·
xn − xn−1
ε− νyn
)=
= limε→0N→∞
i
~
N∑n=1
(x2n − x2
n−1
2· yn − νεyn
), (4.6)
and the propagator reads
K(xf , tf ;xi, ti) =
= limε→0N→∞
∫dx1 · · · dxN−1
dy12π~ · · ·
dyN2π~ e
i~∑Nn=1
(x2n−x
2n−1
2yn−νεyn
)=
= limε→0N→∞
∫dy12π~ · · ·
dyN2π~ e
− i~∑Nn=1 νεyn
∫dx1 · · · dxN−1e
i2~∑Nn=1(x2
n−x2n−1)yn . (4.7)
All the calculation for the above expression is performed in the Appendix C, here
we outline the principal steps. The integration in x results in the following infinite
product
∫dx1 · · · dxN−1exp
[i
2~
N∑n=1
(x2n − x2
n−1
)yn
]=
= ei
2~(−y1x20+yNx
2N) ·
j=N−1∏j=1
∫dxje
i2~ (yj−yj+1)x2
j , (4.8)
whose generic element is1
∫ ∞−∞
dxjeiyj−yj+1
2~ x2j = (4.9)
=
∫ ∞−∞
cos
(yj − yj+1
2~x2
1
)dxj + i
∫ ∞−∞
sin
(yj − yj+1
2~x2j
)dxj = (4.10)
=
√2π~
|yj − yj+1|ei[sgn(yj−yj+1)]π
4 . (4.11)
After completing the x integration the action functional will read
1up to a phase exp(2nπ)
49

Path integral
K (xf , tf ;xi, ti) =
= limε→0N→∞
∫dy1
2π~· · · dyN
2π~e−
i~∑Nn=1 νεyne
i2~(−y1x2
0+yNx2N) ·
·j=N−1∏j=1
∫dxje
i2~ (yj−yj+1)x2
j =
= lim
∫dy1
2π~· · · dyN
2π~ei(−
x202~ y1−
νε~ y1−
νε~ y2−···−
νε~ yN−1− νε2~yN+
x2N2~ yN )
×j=N−1∏j=1
√2π~
|yj − yj+1|ei[sgn(yj−yj+1)]π
4 . (4.12)
For the integration over y1 we use the substitution
k1 =x2o
2~+νε
~, z1 =
(x2o
2~+νε
~
)(y1 − y2) = k1(y1 − y2) . (4.13)
So the first term, the integral en y1 reads
∫dy1
2π~
√2π~|y1 − y2|
ei[−(x2o2~ + νε
~ )y1+sgn(y1−y2)π4
] = (4.14)
=2√π√
2π~1√k1
e−ik1y2 . (4.15)
For the integration over y2 one obtains
2√π√
2π~√k1
∫dy2
2π~e−ik1y2e−i
νε~ y2
√2π~|y2 − y3|
ei[sgn(y2−y3)]π4 =
= · · · = 2√π√
2π~1√k1
2√π√
2π~1√k2
e−ik2y3 , (4.16)
with the coefficient k2 = k1 + νε~ , and so on, until the integration on yN−1 with the
coefficient kN−1 = kN−2 + νε~ = x2
o
2~ + (N − 1)νε~ . Then the propagator assumes the
expression
50

4.1 Propagator
K (xf , tf ;xi, ti) =
= limε→0N→∞
∫dyN2π~
j=N−1∏j=1
(2√π√
2π~1√kj
)e(−i kN−1·yN)ei(−
νε~ yN+
x2N2~ yN )) =
= limε→0N→∞
j=N−1∏j=1
(2√π√
2π~1√kj
)∫dyN2π~
ei(−x2o2~−(N−1) νε~ −
νε~ +
x2N2~ )yN =
= limε→0N→∞
j=N−1∏j=1
(2√π√
2π~1√kj
)∫dyN2π~
ei(−x2o2~−N
νε~ +
x2N2~ )yN =
= limε→0N→∞
j=N−1∏j=1
(2√π√
2π~1√kj
)δ
(1
2(−x2
o − 2νNε+ x2N)
)=
= limε→0N→∞
j=N−1∏j=1
(2√π√
2π~1√kj
)2 · δ
(x2N − x2
o − 2νNε))
= A · 2δ(x2N − x2
o − 2νt) . (4.17)
The infinite product in front of the δ is related to the normalization factor, then let’s
observe that the presence of the δ-function makes the propagator vanishing along
any path that does not match the classical one given by the equation (2.8) with
x′ = x(0)
x2(t) = x′2
+ 2νt . (4.18)
This confirms the fact that tunneling effect through the degeneracy is not allowed.
The connection with the Schrodinger’s picture is realized using K(x2, t2;x1, t1)
as a propagator
ψ(x2, t2) =
∫K(x2, t2;x1, t1)ψ(x1, t1) dx1 , (4.19)
where ψ(x2, t2) is the wave function of the system at (x2, t2) and the integration
characterizes the state as a sum of all the probabilities to reach this state from
everywhere (from every previously accessible states). In this context the propagator
K(x2, t2;x1, t1) is given in terms of the eigenfunctions un(x) and eigenenergies Wn
of the Schrodinger’s corresponding problem
K(x2, t2;x1, t1) =∑n
u∗n(x1)un(x2) exp[− i~Wn(t2 − t1)] . (4.20)
51

Path integral
For our simple degenerate system described in Chapter 2.2, first we recall that
the eigenenergies (2.23) are
En :=2ν~a2
(2nπ + θ) =4πν~na2
+2ν~a2
θ, n ∈ Z and θ ∈ [0, 2π] , (4.21)
and the eigenfunctions (2.25) are
un,θ(x) =
√2
aexp
[i2nπ + θ
a2x2
], (4.22)
Then the propagator that takes an initial state ψ(x1 = x′, t1 = 0) to a generic state
ψ(x, t) will be
K(x, t;x′, 0) =∑n
2
a2exp
[i2nπ + θ
a2(x2 − x′2)
]exp
[−i2ν
a2(2nπ + θ)t
]=
=2
a2exp
[iθ
a2(x2 − x′2 − 2νt)
]∑n
exp
[in
2π
a2(x2 − x′2 − 2νt)
]=
= 2
exp
[iθ
a2(x2 − x′2 − 2νt)
]· δ(x2 − x′2 − 2νt) =
= 2 · δ(x2 − x′2 − 2νt) . (4.23)
The above δ is the same found in (4.17), so also with this calculation we re-
covered the same functional dependence of the propagator on the coordinates: the
propagator is a δ-function of the classical trajectory (2.8).
x2(t) = x′2
+ 2νt . (4.24)
Note that we have use the fact that 2
δ(x2) =∑n
cnun(x) =∑n
cn
√2
aexp
[in
2π
a2x2
]=
1
a2
∑n
exp
[in
2π
a2x2
](4.25)
cn := < un(x), δ(x2) >=
∫ a
0
√2
aexp
[−i2nπ
a2x2
]δ(x2)|x|dx =
=
√2
a
∫exp
[−i2nπ
a2x2
]δ(x)
2|x||x|dx =
1
2
√2
a∀n . (4.26)
2The Dirac Delta of a function is given by δ[F (x)] =∑iδ(x−xi)|F ′(xi)| where the sum is over all the
simple zero’s of F (x), i.e. F (xk) = 0 and F ′(xk) 6= 0, to integrate δ[F (x)] is sufficient that thesimple zero’s fall inside the integration interval, as in our case.
52

4.1 Propagator
We can now check how an eigenstate taken as initial state
ψk(x′, t′ = 0) =
√2
aexp
[i2kπ + θ
a2x′2]
(4.27)
propagates through the above calculated propagator 4.23 with the correct integral
measure given by the symplectic structure on the (x, y) phase space according to
(4.4)
det[F (x, y)] = x2 . (4.28)
In principle in the expression of (4.27) the initial value x′ can be either positive
or negative, then3
ψ(x, t) =
∫ a
−aK(x, t;x′, 0)ψ(x′, 0)|x′| dx′ =
=
∫ a
−a2 δ(x2 − x′2 − 2νt) ·
√2
aexp
[i2kπ + θ
a2x′2]|x′|dx′ =
=2√
2
a
∫ a
−aδ(x2 − x′2 − 2νt) exp
[i2kπ + θ
a2x′2]|x′|dx′ = (4.29)
=2√
2
a
−∫ 0
−a
δ(x′ +√x2 + 2νt)
| − 2√x2 + 2νt|
exp
[i2kπ + θ
a2x′2]x′dx′ +
∫ a
0
δ(x′ −√x2 + 2νt)
|2√x2 + 2νt|
exp
[i2kπ + θ
a2x′2]x′dx′
=
=
√2
aexp
[i2kπ + θ
a2(−√x2 + 2νt)2
]ifx < 0
√2
aexp
[i2kπ + θ
a2(√x2 + 2νt)2
]ifx > 0.
(4.30)
Even if we integrate over all possible (negative and positive) initial values of x′,
the above calculated result illustrates how only initial x′ positive (negative) states
contribute to a final x positive (negative) state ψ(x, t).
Therefore in path integral approach all paths that in principle could be contribute
to a tunneling effects are excluded: also this formalism confirms that for a simple
degenerate system there is no net flux across the degeneracy.
3The integration is broken according to δ(x2 − x′2 − 2νt) = δ(x′+√x2+2νt)
|−2√x2+2νt| + δ(x′−
√x2+2νt)
|2√x2+2νt|
53

Chapter 5
Discussion
1. Although the discussion here has been restricted to a rather simple case in which
the configuration space corresponds to the entire real axis, it is easy to see that the
conclusions do not change radically if the configuration space is compact (x ∈ S1).
The only modifications introduced by the topology of the phase space are essentially
two:
i) The restrictions imposed by the Poincare-Hopf theorem that relates the degree of
the singularities in the Hamiltonian flow and the Euler characteristic of the phase
space manifold [23]
ii) The fact that the orbits reverse orientation at the degeneracy surfaces. This
restrict the functional form for the expression of degeneration surface to be a Jordan
curve.
2. The orthogonality of the Hilbert spaces on different sides of a degeneracy sur-
face is not affected by the fact that some eigenvalues might accidentally match –e.g.,
if (2.53) holds. Even in the extreme case, in which all eigenvalues are identical (for
a− = a+), the eigenstates supported on different sides are still orthogonal. In that
case, the states could also be arranged into a basis of symmetric and antisymmetric
wavefunctions, and not supported only on one side or the other. Such a basis of
parity eigenstates may be convenient since the parity operator commutes with the
Hamiltonian.
3. The conclusion of no quantum tunnelling obtained in the canonical quantiza-
tion approach is consistent with other methods like Dirac’s Hamiltonian approach,
Feynman’s path integral, or the old Bohr-Sommerfeld quantization condition.
4. Lovelock Lagrangians that generalize the Einstein-Hilbert theory for dimen-
sions higher than four, as well as Chern-Simons theories in dimensions five or more,
54

5.1 Summary
are widely studied models for the potential description of spacetime and fundamen-
tal interactions at high energies. However, these actions are well known to present
degeneracies [2, 19–22], and should be regarded, therefore, as describing a host of
different physical systems. Depending on the initial conditions where the system
starts, the evolution may take the system towards a degeneracy surface, where the
number of degrees of freedom is reduced and the resulting field theory has an effec-
tive dynamics that corresponds to fewer dimensions, a sort of dynamical dimensional
reduction as discussed in [20].
5.1 Summary
Let us summarize our results:
• Two types of degenerate systems can be distinguished: those whose orbits never
intersect the surfaces of degeneracy (reducible systems) and the rest (irreducible
ones). In the first case, there exists an action principle which yields the same
dynamics everywhere in phase space (with the possible exception of the degenerate
surfaces, where the orbits may not exist). Irreducible systems on the other hand
cannot be globally described by a nondegenerate action principle.
• The quantum mechanical description is obtained by the canonical substitution
as in the standard Schrodinger picture, c.f., Eqs. (2.3, 2.4,2.5). The only difference is
that the degeneracy of the symplectic form becomes the singular set of the quantum
Hamiltonian operator. Since the singular points must be removed from the domain
of the Hamiltonian operator, for consistency they should also be removed from the
domain of the wave functions. This means that the Hilbert space must allow for
wave functions that can be discontinuous at the degenerate surfaces, where they are
allowed to present a finite jump.
• The proper Hilbert space is equipped with a weighted scalar product defined as
the absolute value of the symplectic form w(x) = |F ij| (see 2.10) due to the required
symmetry condition and the positivity of scalar product
• Allowing discontinuous wave functions implies that the solutions have support
restricted to a single region bounded by a degenerate surface Σ. This is realized by
a Hilbert space that splits into a direct sum of orthogonal subspaces. Generalizing
this conclusion, we see that since Σ defines a collection of Jordan curves, the Hilbert
space that describes a quantum degenerate system must be of the form
H = ⊕Ni=1Hi, (5.1)
55

Discussion
where each Hilbert subspace describes the dynamics of a subsystem supported in
only one nondegenerate domain.
• The physical consequence of this is that there is no overlap between wavefunc-
tions on different nondegenerate regions, and therefore no tunnelling across surfaces
of degeneracy. This is in complete analogy with the classical picture of degenerate
systems.
• The degeneracy surface does not permit tunneling effects, then it is analo-
gous to an event horizon: an observer outside knows only what happen before the
degeneracy surface and beyond there is region of information loss.
• For the case of mixed system, here we have presented one composed of the
simple degenerate system and a harmonic oscillator. We found that there is no
evidence for tunneling effect, not even if the nondegenerate system survives once the
degenerate one colapsed: the harmonic oscillator continues undisturbed its evolution
without producing any excitation of the degenerate one.
5.2 Open questions
•What we have shown in this thesis is a first step in quantize degenerate systems by
means of simple examples. Even in the context of finite number degrees of freedom
there are still many problems for different toy model including relativistic or spin
effects, considering different geometries or boundary conditions. Finally there could
be many examples of practical interest in physics or other disciplines. First of all
we
• In the simple coupled model, we discussed a particular coupling, so a question
that needs more attention is about other couplings and possible tunneling effects in
those cases.
• A particularly interesting question is to understand how the present discussion
extends to field theories. In particular, this would allow deciding whether the Chern-
Simons systems in five spacetime dimensions or more are reducible or not. Although
the notion of orbit in a field theory is only formally defined, some of the essential
features of the distinction between reducible and irreducible systems can be applied.
It might be conjectured that CS systems forD ≥ 5 are generically irreducible (they
cannot be replaced by a non-degenerate action principle), it is far from obvious how
to settle this question.
Another, even more difficult question is how does a CS system behave quantum
mechanically.
56

5.2 Open questions
• In nonabelian theories the existence of the Gribov copies that comes from
the non-uniqueness of the gauge condition forces one to restrict the domain of the
integration in field space. It can be profitable to study the connection between the
existence of the so-called Gribov horizon and the existence of the degeneracy. This
imposes an accurate analysis of the constraints at the Gribov horizon to distinguish
between regular and irregular constraints. Preliminary results on this issue suggest
the possibility of interpreting Gribov horizon as degeneracy surface and viceversa.
We can expect that a deeper understanding of this interconnection would be relevant
in order to face field theory issues given the results in the degenerate context.
• Loss of information about initial data and irreversibility of evolution are the
relevant characteristics of the degeneracy. Then the degeneracy surface can be
interpeted as a sort of dynamical dimensional reduction mechanism: a degenerate
system can start from an initial configuration and evolve irreversibly towards another
with few degrees of freedom. In order to complete this interpretation one should be
able to answer some additional questions: is it possible to distinguish if a system
is living on a degenerate surface, i.e. it comes from higher dimensions and it has
already colapsed? Would it be possible to interpret a gauge freedom as a colapsed
dimension?
57

Appendix A
On the self-adjointness
With regard to properties of operators1, it is worth to clarify and repeat some already
known results (see [27] and [28]), emphasizing once more that defining an operator
means to specify its action and at the same time its domain.
First we remember that an operator A on a Hilbert space A : D(A) ⊂ E → F is
called symmetric (or Hermitian) if
< Aψ, φ >=< ψ,Aφ > ∀ψ, φ ∈ D(A) (A.1)
The adjoint of A is denoted by A† and defined as
< A†ψ, φ >=< ψ,Aφ > ∀ψ ∈ D(A†),∀φ ∈ D(A) (A.2)
It means that in principle the domain D(A†) of the adjoint operator A† is not
necessarily identical to the domain D(A) of the operator A, it can be larger: if the
operator is simmetric then D(A) ⊆ D(A†).
If the domains of A† and A coincide, then the operator is self-adjoint
A = A† and D(A) = D(A†) (A.3)
Clearly for operators defined in all the space, symmetry and self-adjointntess coin-
cide. For bounded operators symmetry and self-adjointness coincide, too. For un-
bounded operator, as the differential operator are, the simmetry is a less-demanding
condition to respect the adjointness, but it ensures that the eigenvalues of H are real
and that eigenvectors corresponding to different eigenvalues are orthogonal. Beside
note that the definition of the adjoint operator, like the self-adjointness, depend
1Remember that byoperators one usually refers to linear operators
58

on how the scalar product is defined: changing the scalar product a self-adjoint
operator will no longer be self-adjoint.
Proof: If v is an eigenvector of H with α as eigenvalue, then Hv = αv. If H is
symmetric, then
< Hv, v >=< v, Hv >→ α < v, v >= α∗ < v, v >→ α = α∗ , (A.4)
the eigenvalue α has to be real.
If w is an other eigenvector of H with a different eigenvalue β, then
< Hv, w >=< v, Hw >→ α < v,w >= β∗ < v,w >→< v,w >= 0 . (A.5)
So eigenvectors corresponding to different eigenvalues are orthogonal.
Further more, the adjointness of H ensures the completeness of its eigenvectors,
so the eigenvectors of a self-adjoint operator form a complete othonormal system,
a basis with which one can construct all the element in the space. This in turn
ensures the unitarity of the time evolution operator, i.e. the time conservation of
probability in the evolution of the system described by H. The evolution operator
is connected to the hamiltonian by
U(t) = e−i~ Ht . (A.6)
If H is self-adjoint, U is unitary (isometric with inverse), i.e. U † = U−1. If H is
not self-adjoint, but only simmetric it is because the domains of H and H† do not
concide, D(H) ⊆ D(H†), so the eigenvectors of H can not describe (or span) all
the space. Then as a consequence U can be isometric but its inverse is not defined:
U preserves the probability amplitude, but is not guaranteed the existence of the
inverse U−1, because the domain of the inverse could fall outside the domain of
U . i.e. of H. This means a temporal evolution is possible, but its reverse may
not be well defined evolution. If the Hamiltonian operator is not self-adjoint the
time-reversibility of the system that H describes is not guaranteed to be physical
any more.
59

Appendix B
Integrating the continuity
equation
Here we outline some details about the integration of the continuity equation.
B.1 The contribution of the discontinous proba-
blity current
Integrating the continuity equation for the simple degenerate system, one has to
evaluate the contribution of the current density J(x, t) as written in (2.58)
J = ν sgn(x) |Ψ(x, t)|2 . (B.1)
Let’s stress that the current density J(x, t) is a continous function except at x = 0
where it presents a step
∆ = J(0+, t)− J(0−, t) = ν|ψ(0+, t)|2 + ν|ψ(0−, t)|2
so its derivative is
∂
∂xJ(x, t) =
∂
∂x
(ν sgn(x) |Ψ(x, t)|2
)x6=0
+ ∆ · δ(x) .
60

B.1 The contribution of the discontinous probablity current
Then we can integrate this last expression over the entire domain∫ a+
a−
∂
∂xJ(x, t) dx =
∫ a+
a−
∂
∂x
(ν sgn(x) |Ψ(x, t)|2
)x 6=0
+
∫ a+
a−∆ · δ(x) =
=
∫ 0−
a−
∂
∂x
(ν sgn(x) |Ψ(x, t)|2
)+
∫ a+
0+
∂
∂x
(ν sgn(x) |Ψ(x, t)|2
)+ ∆ =
= ν sgn(x) |Ψ(x, t)|2∣∣∣0−a−
+ ν sgn(x) |Ψ(x, t)|2∣∣∣a+
0++ ∆ =
= ν− |Ψ(0−)|2 + |Ψ(a−)|2 + |Ψ(a+)|2 − |Ψ(0+)|2 + (B.2)
+|Ψ(0−)|2 + |Ψ(0+)|2
= (B.3)
= ν|Ψ(a+)|2 + |Ψ(a−)|2
. (B.4)
61

Appendix C
Calculating the propagator
We show here the details in calculating the propagator in Chapter 4, through 4.3,
using our lagrangian L = xyx− νy
K(xf , tf ;xi, ti) =
∫Γ
DyDxei~∫
(xyx−νy)dt . (C.1)
We discretize the Lagrangian discretizing the time interval (ti, tf ) in N intervals
of magnitude ε, then we will take the limit N → ∞ and ε → 0. Accordingly the
x (position) and y (momentum) coordinates will be discretized as x → xn−xn−1
2,
x→ xn−xn−1
ε, y → yn with x0 as initial point and xN as final point.
The Hamiltonian action becomes
S = limε→0N→∞
i
~ε
N∑n=1
(xn − xn−1
2· yn ·
xn − xn−1
ε− νyn
)
= limi
~
N∑n=1
(x2n − x2
n−1
2· yn − νεyn
), (C.2)
and the propagator reads
K (xf , tf ;xi, ti) =
= limε→0N→∞
∫dx1 · · · dxN−1
dy1
2π~· · · dyN
2π~ei~∑Nn=1
(x2n−x
2n−1
2yn−νεyn
)=
= limε→0
∫dy1
2π~· · · dyN
2π~e−
i~∑Nn=1 νεyn
∫dx1 · · · dxN−1e
i2~∑Nn=1(x2
n−x2n−1)yn .(C.3)
The integration in x results in the following infinite product
62

∫dx1 · · · dxN−1exp
[i
2~
N∑n=1
(x2n − x2
n−1
)yn
]=
=
∫dx1 · · · dxN−1 ·
·exp
i
2~[− y1x
20 + (y1 − y2)x2
1 + (y2 − y3)x22 + · · ·
· · ·+ (yN−1 − yN)x2N−1 + yNx
2N
]=
= ei
2~(−y1x20+yNx
2N)∫
dx1 · · · dxN−1e( i
2~∑N−1j=1 (yj−yj+1)x2
j ] =
= ei
2~(−y1x20+yNx
2N) ·
j=N−1∏j=1
∫dxje
i2~ (yj−yj+1)x2
j . (C.4)
The generic element of the infinite product is1
∫ ∞−∞
dxjeiyj−yj+1
2~ x2j = (C.5)
=
∫ ∞−∞
cos
(yj − yj+1
2~x2
1
)dxj + i
∫ ∞−∞
sin
(yj − yj+1
2~x2j
)dxj = (C.6)
=
√π
2
2~|yj − yj+1|
+ i sgn(yj − yj+1)
√π
2
2~|yj − yj+1|
= (C.7)
=
√~
|yj − yj+1|+ i sgn(yj − yj+1)
√~
|yj − yj+1|= (C.8)
=
√~
|yj − yj+1|(1 + i sgn(yj − yj+1)) =
=
√2π~
|yj − yj+1|ei[sgn(yj−yj+1)]π
4 . (C.9)
After completing the x integration the action functional will read
1Up to a phase exp(2nπi)
63

Calculating the propagator
K (xf , tf ;xi, ti) =
= limε→0N→∞
∫dy1
2π~· · · dyN
2π~e−
i~∑Nn=1 νεyne
i2~(−y1x2
0+yNx2N) ·
·j=N−1∏j=1
∫dxje
i2~ (yj−yj+1)x2
j =
= lim
∫dy1
2π~· · · dyN
2π~ei(−
x202~ y1−
νε~ y1−
νε~ y2−···−
νε~ yN−1− νε2~yN+
x2N2~ yN ) ·
·j=N−1∏j=1
√2π~
|yj − yj+1|ei[sgn(yj−yj+1)]π
4 =
= lim
∫dy1
2π~· · · dyN
2π~ei(−
x202~ y1−
νε~ y1−
νε~ y2−···−
νε~ yN−1− νε2~yN+
x2N2~ yN ) ·
·
√2π~|y1 − y2|
ei[sgn(y1−y2)]π4 ·
√2π~|y2 − y3|
ei[sgn(y2−y3)]π4 · · ·
·
√2π~
|yN−2 − yN−1|ei[sgn(yN−2−yN−1)]π
4 ·
√2π~
|yN−1 − yN |ei[sgn(yN−1−yN )]π
4 .(C.10)
For th integration over y1 we use the substitution
k1 =x2o
2~+νε
~, z1 =
(x2o
2~+νε
~
)(y1 − y2) = k1(y1 − y2) (C.11)
64

then
∫dy1
2π~
√2π~|y1 − y2|
ei[−(x2o2~ + νε
~ )y1+sgn(y1−y2)π4
] = (C.12)
=1√2π~
∫dy1
√1
|y1 − y2|ei[−(
x2o2~ + νε
~ )y1+sgn(y1−y2)π4
] = (C.13)
=1√2π~
∫dz1
k1
√k1
|z1|e−ik1y2ei[−z1+sgn(z1)π
4] = (C.14)
=1√2π~
e−ik1y2√k1
∫dz1
1√|z1|
ei[−z1+sgn(z1)π4
] = (C.15)
=1√2π~
e−ik1y2√k1
∫ 0
−∞dz1
1√|z1|
ei[−z1−π4
] +
∫ ∞0
dz11√|z1|
ei[−z1+π4
]
= (C.16)
=1√2π~
e−ik1y2√k1
(2√π) = (C.17)
=2√π√
2π~1√k1
e−ik1y2 . (C.18)
Similarly, integration over y2 yelds
2√π√
2π~√k1
∫dy2
2π~e−ik1y2e−i
νε~ y2
√2π~|y2 − y3|
ei[sgn(y2−y3)]π4 =
=2√π√
2π~1√k1
∫dy2
2π~
√2π~|y2 − y3|
ei[−(k1+ νε~ )y2+sgn(y2−y3)π
4] =
= · · · = 2√π√
2π~1√k1
2√π√
2π~1√k2
e−ik2y3 , (C.19)
where k2 = k1 + νε~
And so on, until the integration on yN−1 with the coefficient kN−1 = kN−2 + νε~ =
x2o
2~ + (N − 1)νε~ . Then the propagator assumes the expression
65

Calculating the propagator
K (xf , tf ;xi, ti) =
= limε→0N→∞
∫dyN2π~
j=N−1∏j=1
(2√π√
2π~1√kj
)e(−i kN−1·yN)ei(−
νε~ yN+
x2N2~ yN )) =
= limε→0N→∞
j=N−1∏j=1
(2√π√
2π~1√kj
)∫dyN2π~
ei(−x2o2~−(N−1) νε~ −
νε~ +
x2N2~ )yN =
= limε→0N→∞
j=N−1∏j=1
(2√π√
2π~1√kj
)∫dyN2π~
ei(−x2o2~−N
νε~ +
x2N2~ )yN =
= limε→0N→∞
j=N−1∏j=1
(2√π√
2π~1√kj
)δ
(1
2(−x2
o − 2νNε+ x2N)
)=
= limε→0N→∞
j=N−1∏j=1
(2√π√
2π~1√kj
)2 · δ
(x2N − x2
o − 2νNε)). (C.20)
66

Acknowledgements
Vorrei poter ringraziare tutte le persone incontrate in questo lungo tempo, che non
e stato solo il tempo del dottorato, e stato anche un pezzetto non piccolo della mia
vita. Credo di poter ricordare nitidamente ogni frase, commento o sguardo o mano
di chi da vicino o da lontano mi ha accompagnata, vorrei poter pronunciare i nomi
di tutte e tutte, ma la carta non mi da’ lo spazio, gli occhi si chiudono e ringrazio
in silenzio col cuore e con la mente...
I would like to thank all the people encountered in this long time, that is was
not just the time of the my PhD, but it also was a not so small piece of my life. I
think I can clearly remember every sentence, comment or look or hand of who from
near or far accompanied me, I would be able to pronounce the names of all, but the
paper does not give me the space, so with closed eyes I thank in silence with heart
and mind ...
67

This work was supported by Fondecyt grants # 1110102, 1100328, 1100755,
1100328, and by Conicyt grant Southern Theoretical Physics Laboratory, ACT-91.
The Centro de Estudios Cientıficos (CECS) is funded by the Chilean Government
through the Centers of Excellence Base Financing Program of Conicyt.

Bibliography
[1] J. Saavedra, R. Troncoso and J. Zanelli, Degenerate dynamical systems, J.
Math. Phys. 42 (2001) 4383. [arXiv:hep-th/0011231].
[2] C. Teitelboim and J. Zanelli, Dimensionally continued topological gravitation
theory in Hamiltonian form, Class. Quantum Grav. 4 L125 (1987); J. Zanelli,
M. Henneaux and C. Teitelboim, Gravity in higher dimensions, in Proccedings
of SILARG VI, Rio de Janeiro 1987, 70-95.
[3] H. Aref, Rev. Fluid Mechanics, 42 (1983) 345.
[4] D. V. Choodnovsky and G. V. Choodnovsky, Pole expansions of nonlinear
partial differential equations, Nuovo Cimento Soc. Ital. Fis., B 40, 339 (1977).
[5] Yu.A. Kuznetsov, S. Rinaldi and A. Gragnani, Int. J. Bifurcation and Chaos,
13, No. 8 (2003) 2157-2188.
[6] D. Brennan, S. E. Gralla and T. Jacobson,Time-dependent, Non-Axisymmetric
Exact Solutions to Force-Free Electrodynamics in Black Hole Backgrounds,
arXiv:1305.6890 [gr-qc].
[7] V. N. Gribov, Quantization of non-abelian gauge theories Nuclear Physics B139
(1978)
[8] P. A. M. Dirac, Lectures on Quantum Mechanics, Dover, New York (2001).
[9] A. J. Hanson, T. Regge and C. Teitelboim, Constrained Hamiltonian Systems,
Accademia dei Lincei, Roma (1976).
[10] M. Blagojevic, Gravitation and Gauge Simmetries, IoP Publishing Bristol,
(2002).
[11] O. Miskovic and J. Zanelli, Dynamical structure of irregular constrained sys-
tems, J. Math. Phys. 44, 3876 (2003). [hep-th/0302033].
69

[12] D. M. Gitman and I. V. Tyutin, Quantization of Fields with Constraints,
Springer, Berlin (1990).
[13] J. Zanelli, Uses of Chern-Simons actions, in “Ten Years of the AdS-CFT Con-
jecture”, J. Edelstein, N. Grandi, C. Nunez, M. Schwellinger, (eds.) Buenos
Aires (2008). arXiv:0805.1778 [hep-th].
[14] S. A. Hojman and L. C. Shepley, No Lagrangian - No quantization, J. Math.
Phys. 32, 142 (1991).
[15] F. Riesz and B. Sz.-Nagy, Functional Analysis, Dover, New York (1990).
[16] V. I. Arnold, Mathematical Methods of Classical Mechanics, Springer, New
York (1978).
[17] L. D. Faddeev and R. Jackiw, Phys. Rev. Lett. 60, 1692 (1988).
[18] S. Hojman and L. F. Urrutia, J. Math. Phys. 22, 1896 (1981).
[19] M. Banados, L. J. Garay and M. Henneaux, Phys. Rev. D53 (1996) 593; Nucl.
Phys. B476 92 (1996) 61.
[20] M. Hassaıne, R. Troncoso and J. Zanelli, Poincare-invariant gravity with local
supersymmetry as a gauge theory for the M-algebra, Phys. Lett. B 596, 132
(2004). [hep-th/0306258].
[21] O. Miskovic, R. Troncoso and J. Zanelli, Canonical sectors of five-dimensional
Chern-Simons theories, Phys. Lett. B615, 277 (2005).
[22] J. Zanelli, Lecture notes on Chern-Simons (super-)gravities. Second edition
(February 2008), unpublished [hep-th/0502193].
[23] J. W. Milnor, Topology from the differentiable viewpoint, Princeton University
Press (1997).
[24] R. P. Feynman, Space-Time approach to Non-Relativistic Quantum Mechanics,
Reviews of Moderns Physics 20 (1948).
[25] R. P. Feynman and A. R. Hibbs, Quantum Mechanics and Path Integral,
McGraw-Hill, (1965).
[26] P. A. M. Dirac, The Lagrangian in quantum mechanics, Phys. Z. Soviet Union
3, 64 (1933).

[27] M. Reed and B. Simon, Methods of modern mathematical physics, Academic
Press, (1970).
[28] P. Caldirola, R. Cirelli and G. M. Prosperi, Introduzione alla fisica teorica,
UTET, Milano (1996).
[29] Laurent Schwartz, Mathematics for the physical science Addison-Wesley Pub-
lishing Company, (1966).
[30] J. W. Milnor, Morse Theory, Annals of Mathematics Studies, Princeton Uni-
versity Press (1973).
[31] C. Nash ans S. Sen Topology and Geometry for Physicists, Accademic Press
(1983).
[32] J. Moser and E. J. Zehnder Notes on dynamical systems, Courant lecture notes,
American Mathematical Society (2005).
[33] M. Abate and F. Tovena Geometria differenziale, Springer (2011).
[34] L. C. Evans Partial differential equations., American Mathematical Society,
Volume 19, (2010).
[35] M. S. Gockenbach Partial differential equations: analytical and numerical meth-
ods, Second Edition, Siam (2010).
[36] F. Tricomi Sulle equazioni lineari alle derivate parziali di secondo ordine di tipo
misto, Atti Accad. Naz. Lincei Mem. Cl. Sci. Fis. Mat. Natur. (5) 14 (1923),
134-247.
[37] R. P. Feynman, Phys. Rev. 84, 108 (1951).
[38] L. D. Faddeev, The Feynman integral for singular Lagrangian, Theor. Math.
Phys. 1 (1969) 1.
[39] P. Senjanovic, Annals of Physics, 100, 227-261 (1976)
Recommended