PRACTICA 5 DE
REGULACION
AUTOMATICA
PID. Descripcion y reglas
heurısticas de sintonizacion
Dpto. Ing. Sistemas y AutomaticaUniversidad de Sevilla

2

Indice general
1. PID. Descripcion y reglas heurısticas de sintonizacion 5
1.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.2. El sistema a controlar . . . . . . . . . . . . . . . . . . . . . . 5
1.2.1. Puesta en marcha . . . . . . . . . . . . . . . . . . . . . 61.2.2. Trabajar con graficos de la ventana del programa QICii 91.2.3. Guardando datos . . . . . . . . . . . . . . . . . . . . . 101.2.4. Generador de senales de entrada . . . . . . . . . . . . . 11
1.3. El controlador PID . . . . . . . . . . . . . . . . . . . . . . . . 121.4. Ajustes del PID. Reglas de Ziegler-Nichols . . . . . . . . . . . 13
1.4.1. Primer metodo de Ziegler-Nichols . . . . . . . . . . . . 131.4.2. Segundo metodo de Ziegler-Nichols . . . . . . . . . . . 16
3

4 INDICE GENERAL
Capıtulo 1
PID. Descripcion y reglas
heurısticas de sintonizacion
1.1. Introduccion
El objetivo de esta practica es que el alumno se familiarice y profundiceen el conocimiento de la estructura de control PID, profusamente usada enel mundo industrial.
Para ello se empleara el equipo de practicas DC Motor Control TrainerLa descripcion de la practica y los puntos a tratar en la misma se recogen
en los siguientes apartados.
1.2. El sistema a controlar
El DC Motor Control Trainer (DCMCT) es una unidad versatil disenadapara ensenar y demostrar los fundamentos de control de servomotores demuchas maneras diferentes. El sistema puede facilmente ser configurado pa-ra controlar la posicion y velocidad del motor. En particular, el sistema puedeser usado para ensenar los fundamentos de control PID. Mediante el interfazQICii (QIC interactive interface) facilita el uso del servomotor en experi-mentos de modelizacion, control de velocidad, control de posicion, robustez,y algunos experimentos tactiles.
El sistema consiste en un motor de continua mas un encoder. El motorse controla mediante un amplificador de potencia y este a su vez se alimentade la red mediante un transformador. Senales desde y hacia el sistema deestan disponibles mediante conectores estandar para el control. El sistemapuede ser controlado mediante un PC externo equipado con una tarjeta deadquisicion de datos o a traves de un PIC que hay integrado en la placa, ca-
5
6CAPITULO 1. PID. DESCRIPCION Y REGLAS HEURISTICAS DE SINTONIZACION
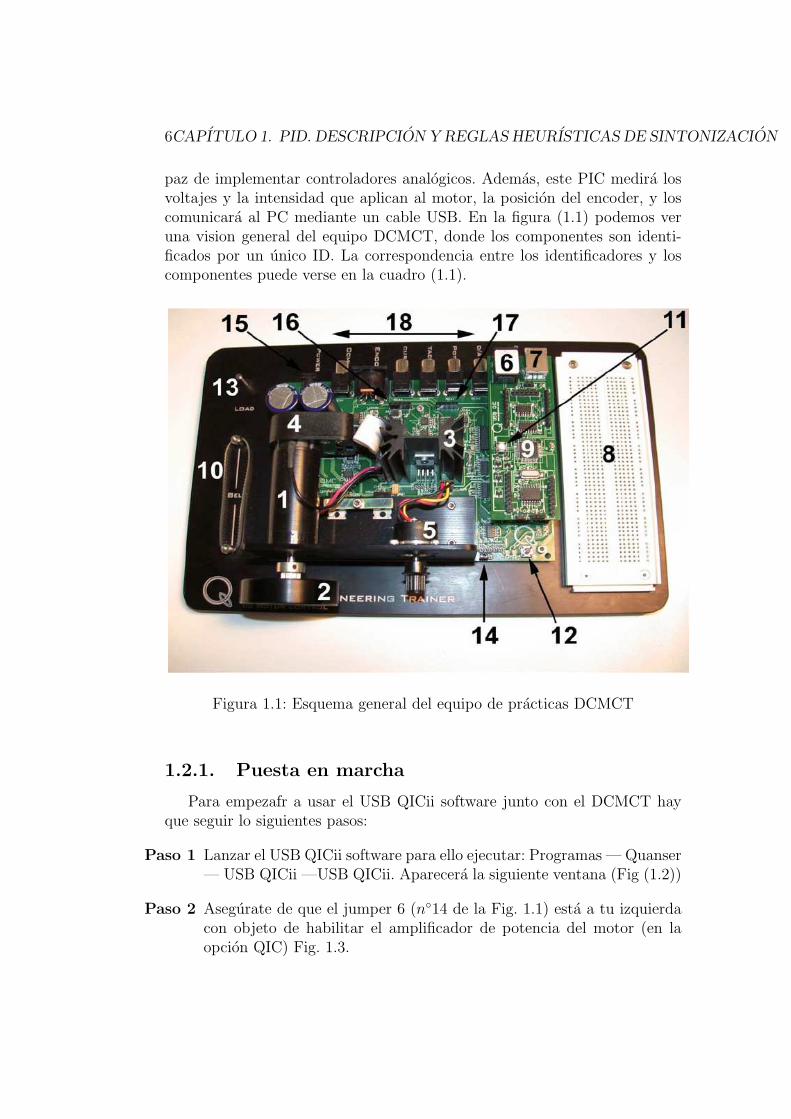
paz de implementar controladores analogicos. Ademas, este PIC medira losvoltajes y la intensidad que aplican al motor, la posicion del encoder, y loscomunicara al PC mediante un cable USB. En la figura (1.1) podemos veruna vision general del equipo DCMCT, donde los componentes son identi-ficados por un unico ID. La correspondencia entre los identificadores y loscomponentes puede verse en la cuadro (1.1).
Figura 1.1: Esquema general del equipo de practicas DCMCT
1.2.1. Puesta en marcha
Para empezafr a usar el USB QICii software junto con el DCMCT hayque seguir lo siguientes pasos:
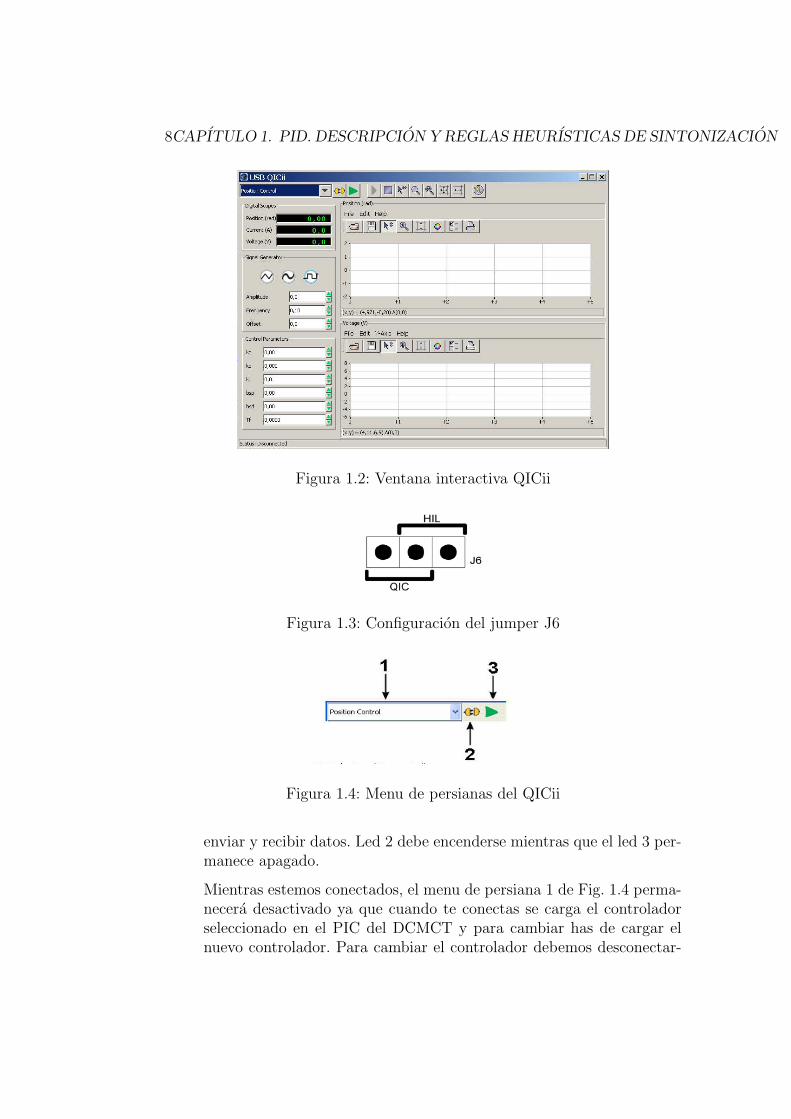
Paso 1 Lanzar el USB QICii software para ello ejecutar: Programas — Quanser— USB QICii —USB QICii. Aparecera la siguiente ventana (Fig (1.2))
Paso 2 Asegurate de que el jumper 6 (n◦14 de la Fig. 1.1) esta a tu izquierdacon objeto de habilitar el amplificador de potencia del motor (en laopcion QIC) Fig. 1.3.
1.2. EL SISTEMA A CONTROLAR 7
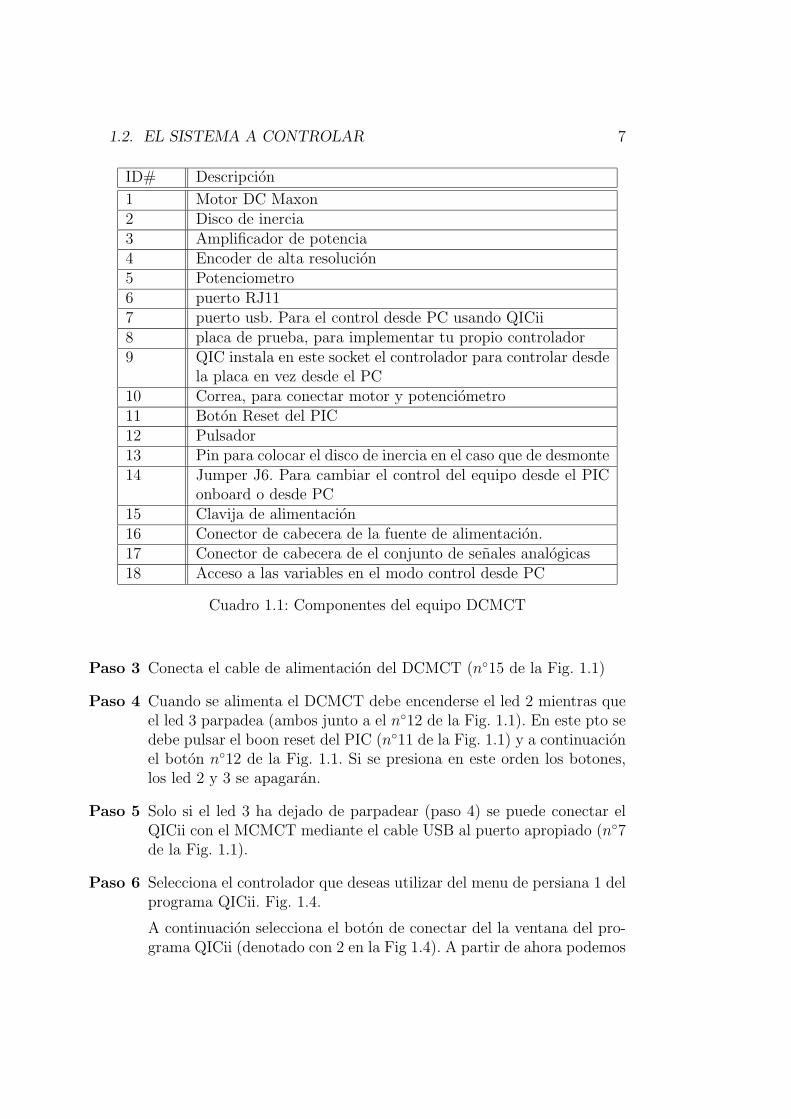
ID# Descripcion
1 Motor DC Maxon2 Disco de inercia3 Amplificador de potencia4 Encoder de alta resolucion5 Potenciometro6 puerto RJ117 puerto usb. Para el control desde PC usando QICii8 placa de prueba, para implementar tu propio controlador9 QIC instala en este socket el controlador para controlar desde
la placa en vez desde el PC10 Correa, para conectar motor y potenciometro11 Boton Reset del PIC12 Pulsador13 Pin para colocar el disco de inercia en el caso que de desmonte14 Jumper J6. Para cambiar el control del equipo desde el PIC
onboard o desde PC15 Clavija de alimentacion16 Conector de cabecera de la fuente de alimentacion.17 Conector de cabecera de el conjunto de senales analogicas18 Acceso a las variables en el modo control desde PC
Cuadro 1.1: Componentes del equipo DCMCT
Paso 3 Conecta el cable de alimentacion del DCMCT (n◦15 de la Fig. 1.1)
Paso 4 Cuando se alimenta el DCMCT debe encenderse el led 2 mientras queel led 3 parpadea (ambos junto a el n◦12 de la Fig. 1.1). En este pto sedebe pulsar el boon reset del PIC (n◦11 de la Fig. 1.1) y a continuacionel boton n◦12 de la Fig. 1.1. Si se presiona en este orden los botones,los led 2 y 3 se apagaran.
Paso 5 Solo si el led 3 ha dejado de parpadear (paso 4) se puede conectar elQICii con el MCMCT mediante el cable USB al puerto apropiado (n◦7de la Fig. 1.1).
Paso 6 Selecciona el controlador que deseas utilizar del menu de persiana 1 delprograma QICii. Fig. 1.4.
A continuacion selecciona el boton de conectar del la ventana del pro-grama QICii (denotado con 2 en la Fig 1.4). A partir de ahora podemos
8CAPITULO 1. PID. DESCRIPCION Y REGLAS HEURISTICAS DE SINTONIZACION
Figura 1.2: Ventana interactiva QICii
Figura 1.3: Configuracion del jumper J6
Figura 1.4: Menu de persianas del QICii
enviar y recibir datos. Led 2 debe encenderse mientras que el led 3 per-manece apagado.
Mientras estemos conectados, el menu de persiana 1 de Fig. 1.4 perma-necera desactivado ya que cuando te conectas se carga el controladorseleccionado en el PIC del DCMCT y para cambiar has de cargar elnuevo controlador. Para cambiar el controlador debemos desconectar-
1.2. EL SISTEMA A CONTROLAR 9
nos del DCMCT seleccionar un nuevo controlador y volver a conectar.
Paso 7 Activar o desactivar el controlador se hace mediante el boton 3 de Fig.1.4.
1.2.2. Trabajar con graficos de la ventana del progra-
ma QICii
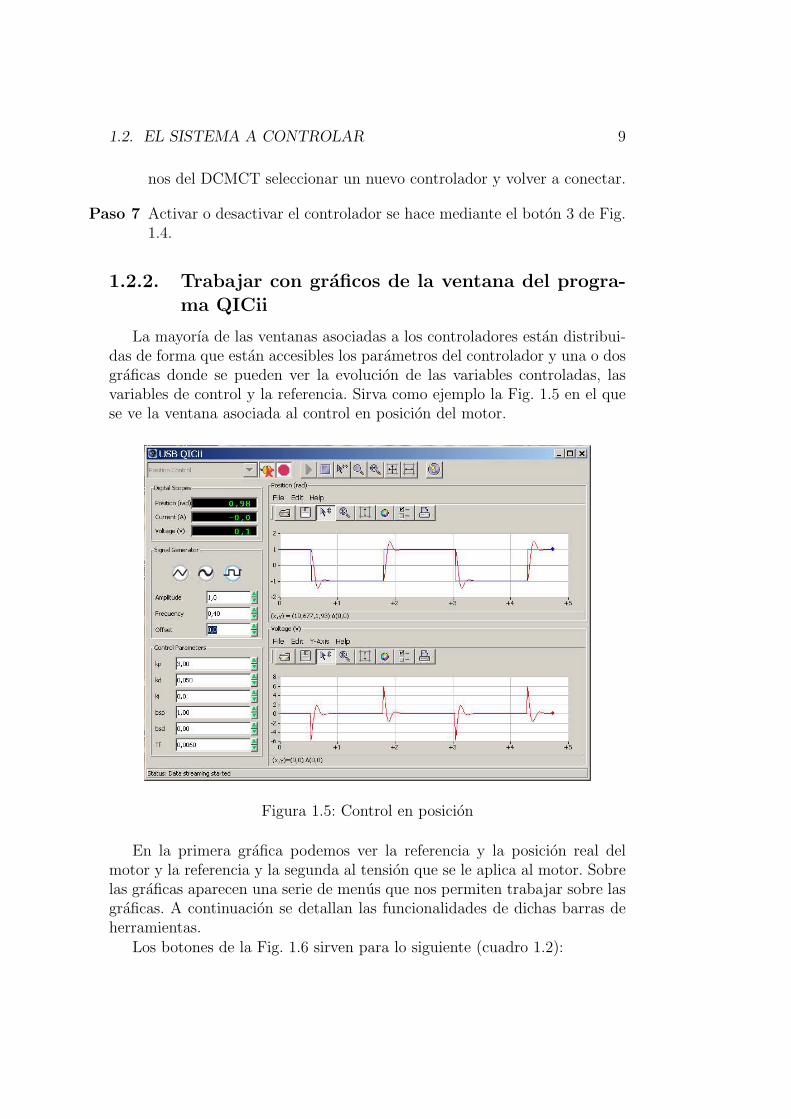
La mayorıa de las ventanas asociadas a los controladores estan distribui-das de forma que estan accesibles los parametros del controlador y una o dosgraficas donde se pueden ver la evolucion de las variables controladas, lasvariables de control y la referencia. Sirva como ejemplo la Fig. 1.5 en el quese ve la ventana asociada al control en posicion del motor.
Figura 1.5: Control en posicion
En la primera grafica podemos ver la referencia y la posicion real delmotor y la referencia y la segunda al tension que se le aplica al motor. Sobrelas graficas aparecen una serie de menus que nos permiten trabajar sobre lasgraficas. A continuacion se detallan las funcionalidades de dichas barras deherramientas.
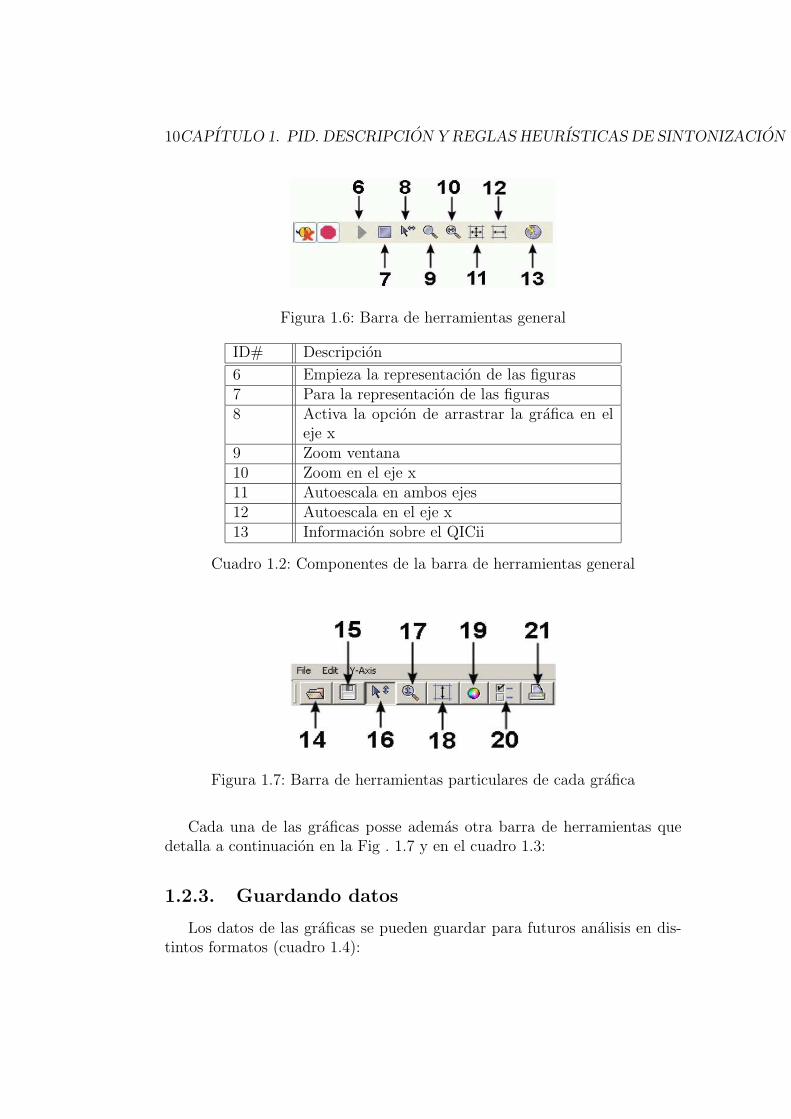
Los botones de la Fig. 1.6 sirven para lo siguiente (cuadro 1.2):
10CAPITULO 1. PID. DESCRIPCION Y REGLAS HEURISTICAS DE SINTONIZACION
Figura 1.6: Barra de herramientas general
ID# Descripcion
6 Empieza la representacion de las figuras7 Para la representacion de las figuras8 Activa la opcion de arrastrar la grafica en el
eje x9 Zoom ventana10 Zoom en el eje x11 Autoescala en ambos ejes12 Autoescala en el eje x13 Informacion sobre el QICii
Cuadro 1.2: Componentes de la barra de herramientas general
Figura 1.7: Barra de herramientas particulares de cada grafica
Cada una de las graficas posse ademas otra barra de herramientas quedetalla a continuacion en la Fig . 1.7 y en el cuadro 1.3:
1.2.3. Guardando datos
Los datos de las graficas se pueden guardar para futuros analisis en dis-tintos formatos (cuadro 1.4):
1.2. EL SISTEMA A CONTROLAR 11
ID# Descripcion
14 Abrir una grafica guardada (en formato *.plt)15 Guardar grafica (Seccion 1.2.3)16 Activa la opcion de arrastrar la grafica en el
eje y17 Zoom en el eje y18 Autoescala eje y19 Colores de las graficas20 Propiedades de las graficas21 Imprimir grafica
Cuadro 1.3: Componentes de la barra de herramientas particulares de cadagrafica
Formato Tipo Uso
.mat Binario para Matlab Con la orden load se carga la variable en elespacio de trabajo de MATLAB
.m MATLAB script Escribe el nombre de la variable para accedera su contenido y representarlo graficamente
.csv Microsoft Excel Importarlo como tabla de valores separadospor comas
.plt Fichero plot Archivo binario para el QICii
.png Archivo de imagen Toma una imagen de la grafica y lo grava comoun PNG (Portable Network Graphics)
Cuadro 1.4: Formatos en los que se pueden guardar los datos
1.2.4. Generador de senales de entrada
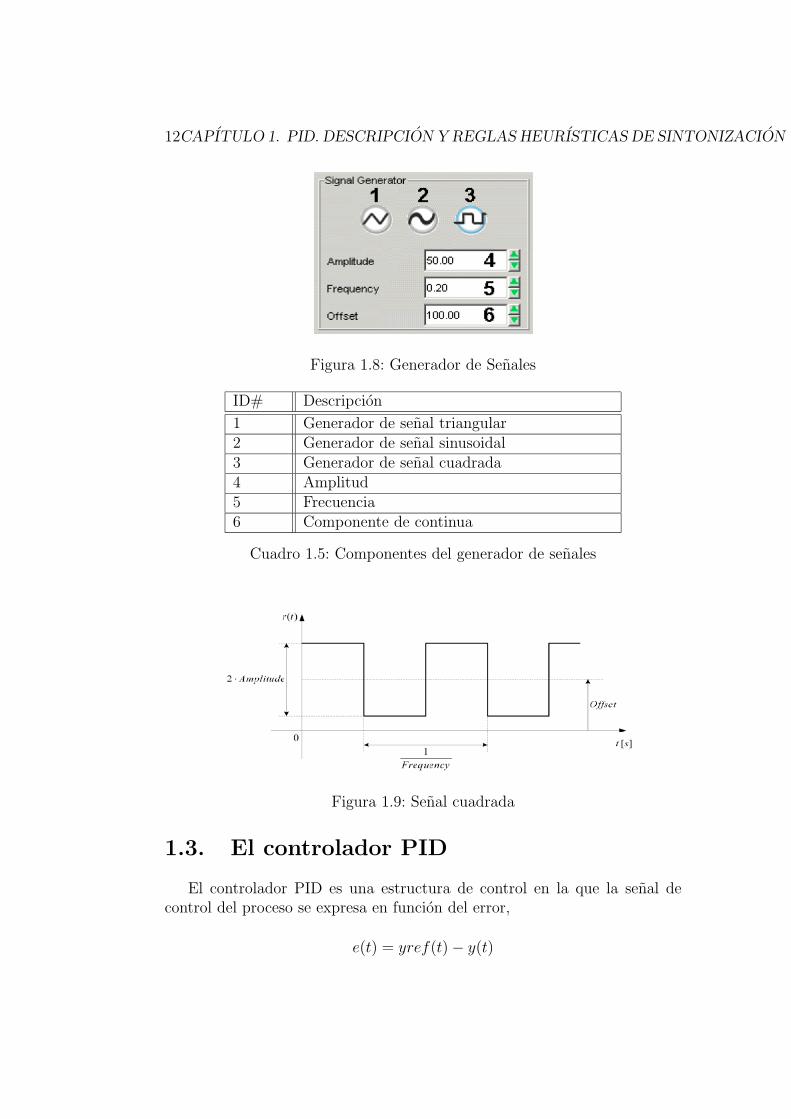
La mayorıa de los modulos tienen un generador de senales que es nece-sario para realizar diversos ensayos sobre el DCMCT. Sirva por ejemplo larespuesta ante escalon, respuesta frecuencial o bien para generar la referenciadel motor ya controlado. La descripcion de dicho generador de senales puedeverse en la Fig. 1.8 y el cuadro 1.5. Un ejemplo de senal cuadrada puedeverse en la Fig. 1.9
12CAPITULO 1. PID. DESCRIPCION Y REGLAS HEURISTICAS DE SINTONIZACION
Figura 1.8: Generador de Senales
ID# Descripcion
1 Generador de senal triangular2 Generador de senal sinusoidal3 Generador de senal cuadrada4 Amplitud5 Frecuencia6 Componente de continua
Cuadro 1.5: Componentes del generador de senales
Figura 1.9: Senal cuadrada
1.3. El controlador PID
El controlador PID es una estructura de control en la que la senal decontrol del proceso se expresa en funcion del error,
e(t) = yref(t) − y(t)

1.4. AJUSTES DEL PID. REGLAS DE ZIEGLER-NICHOLS 13
segun la expresion estandar:
u(t) = Kpe(t) +
t∫
0
Kie(τ)dτ + Kd
de(t)
dt
donde Kp, Ki y Kd corresponden respectivamente a las constantes Propor-cional, Integral y derivativa del controlador.
La expresion anterior puede igualmente expresarse como la siguiente fun-cion de transferencia del controlador PID
K(s) =U(s)
E(s)= Kp +
Ki
s+ Kds
Esta funcion de transferencia se puede implementar en el QICii sin mas queponer los valores de dichas constantes en los campos apropiados
1.4. Ajustes del PID. Reglas de Ziegler-Nichols
Para un ajuste inicial del controlador anterior, emplearemos las conocidasreglas de Ziegler-Nichols.
1.4.1. Primer metodo de Ziegler-Nichols
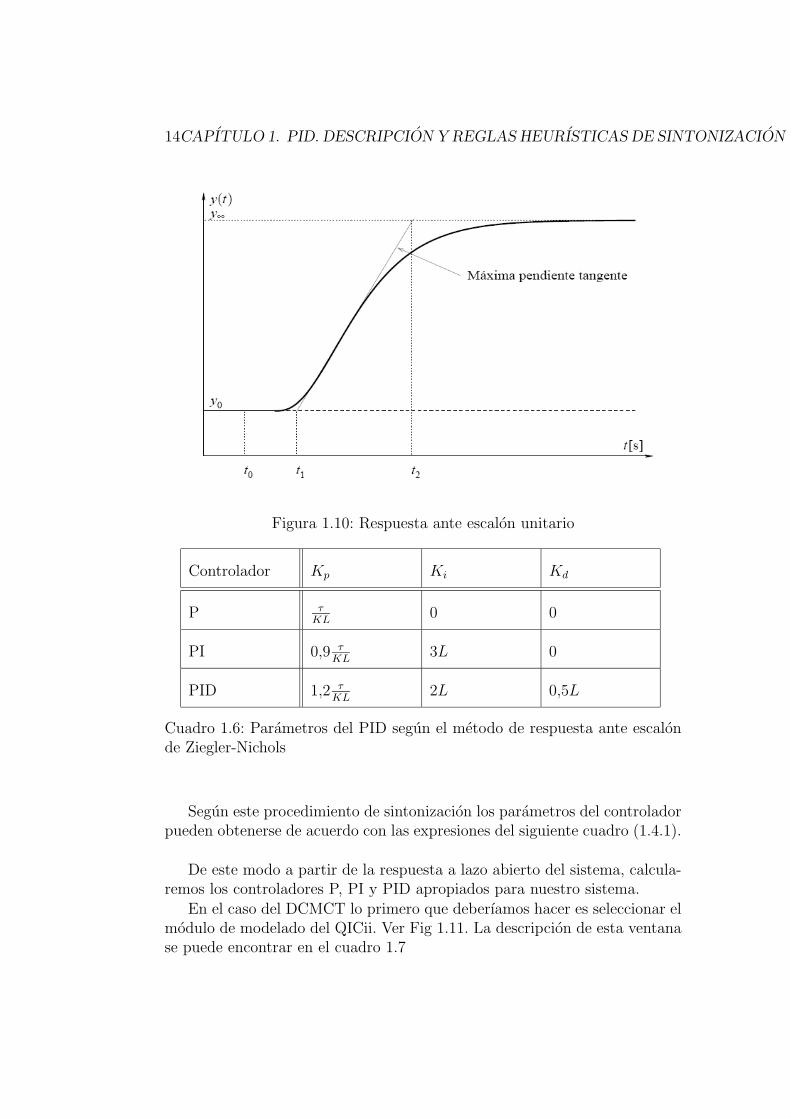
Las caracterısticas del sistema estudiado permite emplear el metodo derespuesta a escalon de Ziegler-Nichols que caracteriza un sistema mediantelos parametros, K, L y τ , obtenidos a partir de la respuesta a lazo abiertodel mismo como representa la figura siguiente
En el instante t0 se aplica un escalon, la senal de control cambia de u0
a u∞. A partir de la respuesta al mismo podemos calcular los siguientesparametros:
Ganancia estatica
K =y∞ − y0
u∞ − u0
.
Retraso del sistemaL = t1 − t0
Constante de tiempo del sistema
τ = t2 − t1
14CAPITULO 1. PID. DESCRIPCION Y REGLAS HEURISTICAS DE SINTONIZACION
Figura 1.10: Respuesta ante escalon unitario
Controlador Kp Ki Kd
P τKL
0 0
PI 0,9 τKL
3L 0
PID 1,2 τKL
2L 0,5L
Cuadro 1.6: Parametros del PID segun el metodo de respuesta ante escalonde Ziegler-Nichols
Segun este procedimiento de sintonizacion los parametros del controladorpueden obtenerse de acuerdo con las expresiones del siguiente cuadro (1.4.1).
De este modo a partir de la respuesta a lazo abierto del sistema, calcula-remos los controladores P, PI y PID apropiados para nuestro sistema.
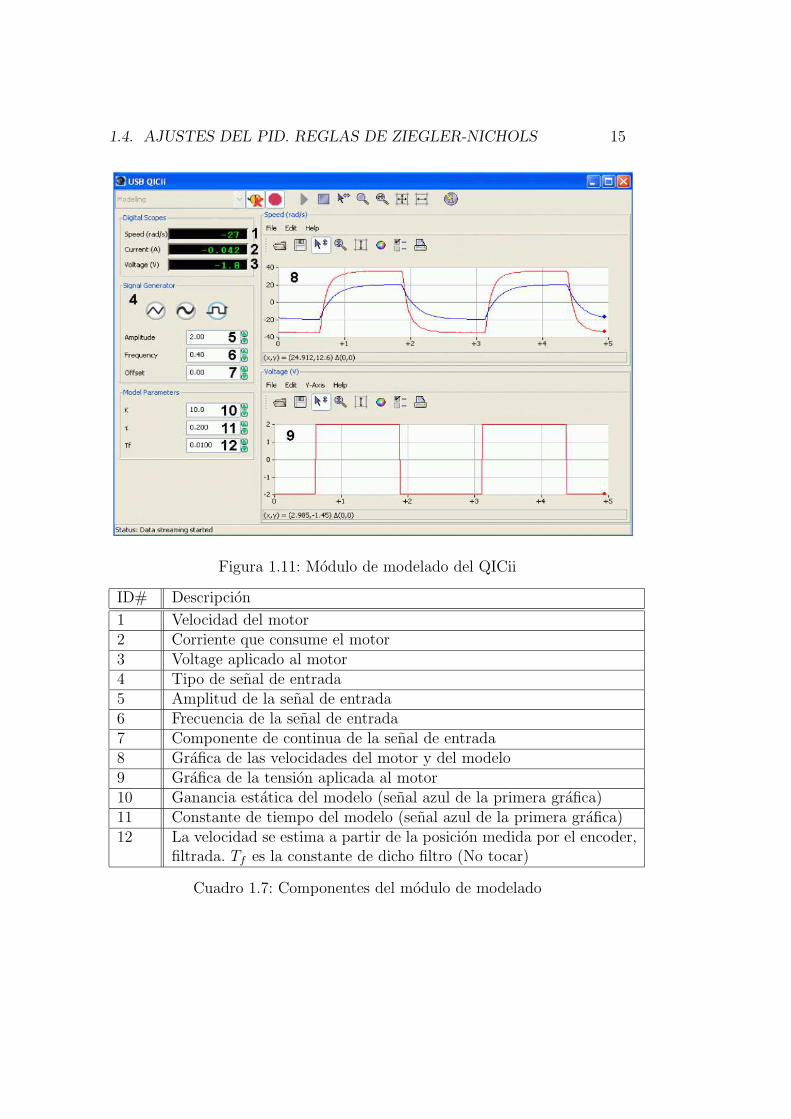
En el caso del DCMCT lo primero que deberıamos hacer es seleccionar elmodulo de modelado del QICii. Ver Fig 1.11. La descripcion de esta ventanase puede encontrar en el cuadro 1.7
1.4. AJUSTES DEL PID. REGLAS DE ZIEGLER-NICHOLS 15
Figura 1.11: Modulo de modelado del QICii
ID# Descripcion
1 Velocidad del motor2 Corriente que consume el motor3 Voltage aplicado al motor4 Tipo de senal de entrada5 Amplitud de la senal de entrada6 Frecuencia de la senal de entrada7 Componente de continua de la senal de entrada8 Grafica de las velocidades del motor y del modelo9 Grafica de la tension aplicada al motor10 Ganancia estatica del modelo (senal azul de la primera grafica)11 Constante de tiempo del modelo (senal azul de la primera grafica)12 La velocidad se estima a partir de la posicion medida por el encoder,
filtrada. Tf es la constante de dicho filtro (No tocar)
Cuadro 1.7: Componentes del modulo de modelado
16CAPITULO 1. PID. DESCRIPCION Y REGLAS HEURISTICAS DE SINTONIZACION
Podemos ver que el DCMCT no presenta retraso por lo que este metodono es aplicable.
1.4.2. Segundo metodo de Ziegler-Nichols
El segundo metodo de Ziegler-Nichols, o metodo de respuesta en frecuen-cia es un metodo alternativo de sintonizacion de PIDs que puede describirsecomo sigue:
En primer lugar es necesario ajustar las ganancias integral y derivativa acero, esto es Ki = 0 y Kd = 0.
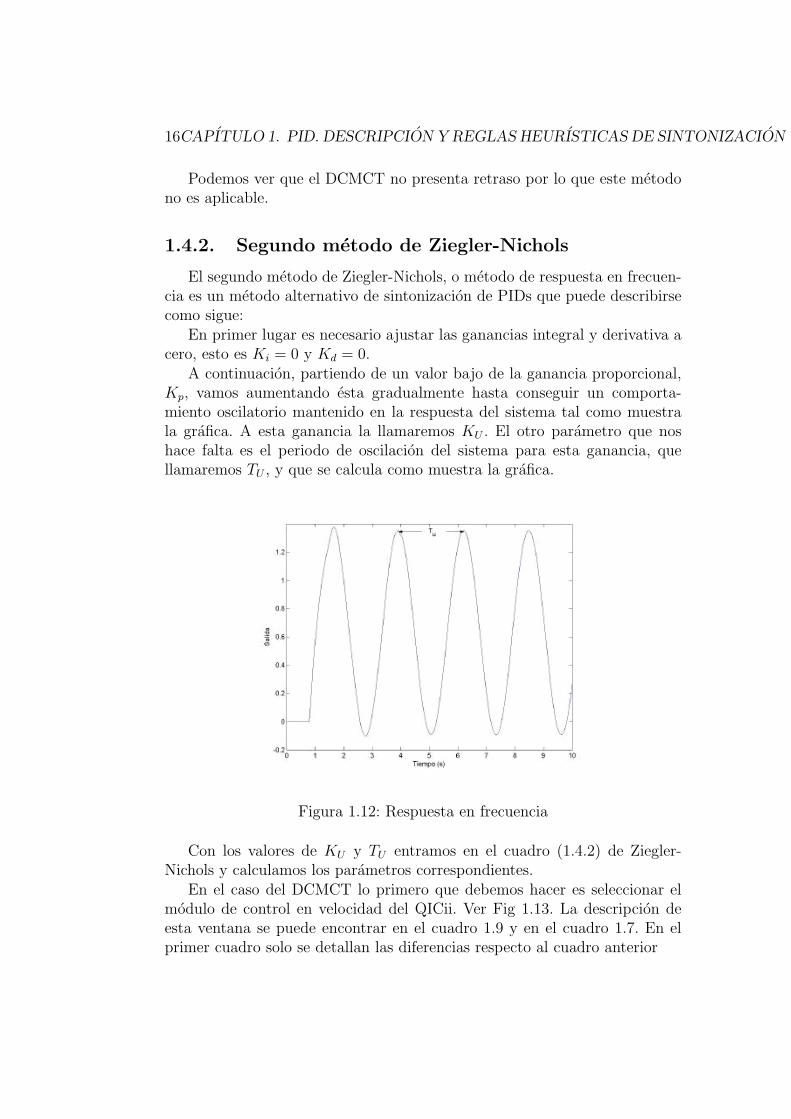
A continuacion, partiendo de un valor bajo de la ganancia proporcional,Kp, vamos aumentando esta gradualmente hasta conseguir un comporta-miento oscilatorio mantenido en la respuesta del sistema tal como muestrala grafica. A esta ganancia la llamaremos KU . El otro parametro que noshace falta es el periodo de oscilacion del sistema para esta ganancia, quellamaremos TU , y que se calcula como muestra la grafica.
Figura 1.12: Respuesta en frecuencia
Con los valores de KU y TU entramos en el cuadro (1.4.2) de Ziegler-Nichols y calculamos los parametros correspondientes.
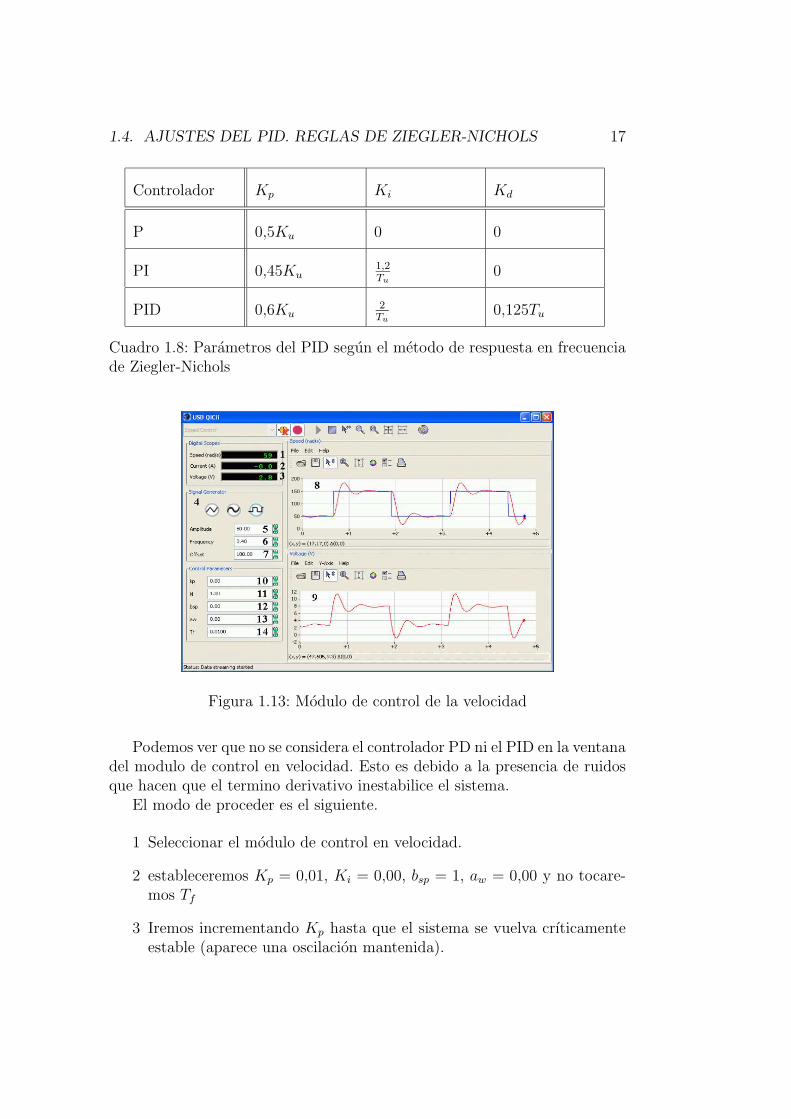
En el caso del DCMCT lo primero que debemos hacer es seleccionar elmodulo de control en velocidad del QICii. Ver Fig 1.13. La descripcion deesta ventana se puede encontrar en el cuadro 1.9 y en el cuadro 1.7. En elprimer cuadro solo se detallan las diferencias respecto al cuadro anterior
1.4. AJUSTES DEL PID. REGLAS DE ZIEGLER-NICHOLS 17
Controlador Kp Ki Kd
P 0,5Ku 0 0
PI 0,45Ku1,2
Tu
0
PID 0,6Ku2
Tu
0,125Tu
Cuadro 1.8: Parametros del PID segun el metodo de respuesta en frecuenciade Ziegler-Nichols
Figura 1.13: Modulo de control de la velocidad
Podemos ver que no se considera el controlador PD ni el PID en la ventanadel modulo de control en velocidad. Esto es debido a la presencia de ruidosque hacen que el termino derivativo inestabilice el sistema.
El modo de proceder es el siguiente.
1 Seleccionar el modulo de control en velocidad.
2 estableceremos Kp = 0,01, Ki = 0,00, bsp = 1, aw = 0,00 y no tocare-mos Tf
3 Iremos incrementando Kp hasta que el sistema se vuelva crıticamenteestable (aparece una oscilacion mantenida).

18CAPITULO 1. PID. DESCRIPCION Y REGLAS HEURISTICAS DE SINTONIZACION
ID# Descripcion
10 Ganancia proporcional11 Ganancia Integral11 Peso que se le da a la referencia. En nuestro caso es siempre bsp = 1.
Es un termino que anaden los autores a la expresion general del PIde la siguiente forma
u(t) = Kp(bspr(t) − y(t)) +
t∫
0
Kie(τ)dτ
12 Parametro de configuracion del anti windup
Cuadro 1.9: Componentes del modulo de control de velocidad
4 Mediremos los valores de KU y TU
5 Calcularemos con parametros del controlador y lo probaremos.
Para cada uno de los 2 controladores se pide:
1) Calcular las respuesta en el dominio temporal y caracterizar la res-puesta segun la ganancia estatica a lazo cerrado (K0).
2) Calcular la sobreoscilacion (SO).
3) Calcular el tiempo de subida, (ts).
4) Calcular tiempo de establecimiento (te).
Recommended