Introduction to Geometric Correction

Week 3Geometric CorrectionSept. 20-24, 1999
Radiometric and Geometric Correction
• Correcting for errors in the geometry and measured brightness values of pixels on digital images

Week 3Geometric CorrectionSept. 20-24, 1999
Sources of Radiometric Distortion
• errors related to measured brightness values of the pixels which result from the instruments that are used to record the data
• errors resulting from effects of the atmosphere

Week 3Geometric CorrectionSept. 20-24, 1999
Instrumentation Errors
• IDEAL - radiation detector should have a proportional increase and decrease of signal with detected radiation level
• REAL - many have small degree of non-linearity and will also give small signal out even when no radiation is being detected. Each detector will have slightly different transfer characteristics.
• Leads to striping on an image

Week 3Geometric CorrectionSept. 20-24, 1999
Instrumentation Errors
“Gain”
1 234
5 6
Signal out
Radiation in
“Offset”
IDEAL REALSignal out
“Offset”
Radiation in
Bands
(Richard’s, 1993)

Week 3Geometric CorrectionSept. 20-24, 1999
Atmospheric Errors
• Wide field of view of sensor = difference in atmospheric path length between nadir and extremities of the swath
• Rayleigh and Mie scattering will effect different wavelength bands of a sensor system.

Week 3Geometric CorrectionSept. 20-24, 1999
Sources of Geometric Distortion
• Rotation of the earth during image acquisition• the finite scan rate of some sensors• the curvature of the earth• variation in platform altitude, attitude and velocity• panoramic effects related to the imaging geometry
Errors of geometry in the digital image:

Week 3Geometric CorrectionSept. 20-24, 1999
Rotation of the Earth
• Takes a finite amount of time to obtain a frame of image data
• earth is rotating from west to east, therefore the bottom of the image must be off-set the ground distance that the earth rotated during the image acquisition

Week 3Geometric CorrectionSept. 20-24, 1999
Effect of Rotation of the Earth
Satellite motion
Earth Motion

Week 3Geometric CorrectionSept. 20-24, 1999
Finite Scan Rate of Sensors
• Mechanical line scanners take a finite amount of time to scan one line across the swath
• satellite is moving in its orbit during the scan time
• end of scan line has advanced a specific distance as compared to its beginning

Week 3Geometric CorrectionSept. 20-24, 1999
Curvature of the Earth
• Aircraft due to their low altitude are not effected
• Landsat and SPOT are not effected because they have relatively narrow swaths
• NOAA has swath of 2700 km and pixels at the edges of the swath would be different sizes

Week 3Geometric CorrectionSept. 20-24, 1999
Curvature of the EarthSatellite
Swath
Earth’s surface
(Richard’s, 1993)

Week 3Geometric CorrectionSept. 20-24, 1999
Variation in Altitude, Velocity and Attitude
• Changes in the sensor’s altitude result in changes in scale in the IFOV
• velocity results in change of scale along the track direction
• attitude (pitch, roll, yaw) of aircraft result in localized distortions

Week 3Geometric CorrectionSept. 20-24, 1999
Panoramic Distortion
• Pixel size on the ground is larger at the extremities of the scan than at nadir
• along track, pixels are same

Week 3Geometric CorrectionSept. 20-24, 1999
Types of Distortion in an Image
• Systematic– predictable– corrected at the receiving station
• Random– unpredictable– corrected by the analyst

Week 3Geometric CorrectionSept. 20-24, 1999
Example of Systematic Errors
• Caused by the eastward rotation of the earth– de-skewing corrects for this by shifting scan
lines by a calculated number of pixels• dependent on the estimated latitude relative to
the start point, satellite velocity relative to the Earth, and the length of the image frame being recorded
• reason for the parallelogram appearance

Week 3Geometric CorrectionSept. 20-24, 1999
Parallelogram Image Shape
Original SPOT image of the Jakarta area
Bogor study area

Week 3Geometric CorrectionSept. 20-24, 1999
Example of Systematic Errors
• Other errors are dependent upon the type of sensor

Week 3Geometric CorrectionSept. 20-24, 1999
Non-Systematic Errors• Altitude and attitude variations
– if the sensor changes from its normal orbit, distortions in scale result
• topographic effects– cause distortions in scale - orthorectification
• no relation of raw image to coordinate system

Week 3Geometric CorrectionSept. 20-24, 1999
Non-Systematic Errors
• noise– random or irregular interfering effects in the
data which effect its quality• SENSOR- destriping corrects for problems
associated with sensor mirror effects, line-dropout correction involves correcting for dropped lines
• HAZE - remove atmospheric scatter

Geometric Correction
Correcting for errors of image geometry

Week 3Geometric CorrectionSept. 20-24, 1999
Raw Data For Bogor
No defined datum or map projection. Still oriented to the satellite’s orbit

Week 3Geometric CorrectionSept. 20-24, 1999
Ground Control Point (GCP) Collection
• User identifies x,y coordinates of several pairs of points (GCPs) that represent the same area within both the uncorrected and corrected data.
• Uncorrected (Bogor image) is in units of pixels and lines, while the corrected road vectors recorded with coordinates of eastings and northings or latitude and longitude.

Week 3Geometric CorrectionSept. 20-24, 1999
ER Mapper Rectification Options
Or Triangulated
Or quadratic, cubic
Or bilinear, cubic

Week 3Geometric CorrectionSept. 20-24, 1999
Type of Rectification• Polynomial
– transform raw (or unknown) imagery to a known projection. – Georeferencing, geocoding– use GCPs– reduces global image distortion
• Triangulation – reduces local distortion in the image– common in geo-scanned data. – Delauney Triangle is a common method

Week 3Geometric CorrectionSept. 20-24, 1999
1. Collect GCPs• source from vectors, digital maps, GPS, hardcopy maps,etc• even distribution
2. Solve polynomial equation • relates old raw image to new corrected image• software does this
3. Transformation• Use equation solution to transform the entire image
4. Resampling• Interpret spatially which pixel goes where in the new coordinate system
Image Correction Steps

Week 3Geometric CorrectionSept. 20-24, 1999
Polynomial Rectification
1st Order Coordinate Transformation
x’ = a0 + a1x + a2yy’ = b0 + b1x + b2y
where: x and y = output (correct map coordinates) x’ and y’ = input (distorted image coordinates)
These are linear, 1st order equations with 3 unknown coefficients.

Week 3Geometric CorrectionSept. 20-24, 1999
To solve the 1st order equations:
need 3 GCPs - one equation for each unknown
x’ = a0 + a1x + a2yx’1 = a0 + a1x1 + a2y1
x’2 = a0 + a1x2 + a2y2
1 GCP - translation2 GCPs - translation and scaling (scaling only if
non-linear)3 GCPs - translation, scaling, and rotation - 1st
order transformation

Week 3Geometric CorrectionSept. 20-24, 1999
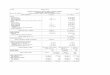
# GCPs for dataset : C:\Data\RS\correction_spot\bogor.ers## Total number of GCPs: 15# Number turned on : 15# Warp order : 0# GCP TO map projection details:# Map Projection : SUTM48# Datum : IND74# Rotation : 0.000## Point On Locked Cell-X Cell-Y To-X To-Y "1" Yes Yes 813.967 742.184 702561.0928000 9270507.9415000 "2" Yes Yes 863.651 575.005 704057.8375000 9273675.8383000 "3" Yes Yes 962.961 210.023 707125.7190000 9280593.8346000 "4" Yes Yes 969.174 812.828 705401.4677000 9268664.7627000 "5" Yes Yes 1039.732 845.143 706696.0082000 9267816.1122000 "6" Yes Yes 687.160 808.980 699822.2845000 9269554.5992000 "7" Yes Yes 409.441 927.836 693970.5613000 9268035.4819000 "8" Yes Yes 418.656 307.535 696053.7386000 9280292.3662000 "9" Yes Yes 593.043 325.145 699462.0410000 9279421.5655000 "10" Yes Yes 377.656 605.094 694333.5672000 9274527.7801000 "11" Yes Yes 854.482 420.092 704327.3229000 9276774.7082000 "12" Yes Yes 637.379 537.350 699691.1522000 9275084.0113000 "13" Yes Yes 812.502 303.407 703859.1500000 9279208.6238000 "14" Yes Yes 577.939 774.541 697764.3307000 9270593.4779000 "15" Yes Yes 842.336 864.246 702731.9911000 9268026.5549000
Sample of ERMapper GCP File

Week 3Geometric CorrectionSept. 20-24, 1999
Let’s take an example
Point Cell-X Cell-Y To-X To-Y"1" 813.967 742.184 702561.0928000 9270507.9415000"2" 863.651 575.005 704057.8375000 9273675.8383000"3" 962.961 210.023 707125.7190000 9280593.8346000
These are the first three GCPs from Rosie’s “raw_bogor.gcp” file.

Week 3Geometric CorrectionSept. 20-24, 1999
Linear SolutionSolution from solving for three unknown variables (done by the computer):
x’ = 23796.827 + 0.0457859x - 0.005949 y
• Now each additional GCP will slightly modify these coefficients to get a “better” model.
• For transformation, the computer will use the final equation and apply it to each pixel to determine output.

Week 3Geometric CorrectionSept. 20-24, 1999
Root Mean Squared Error
• requires at least 4 GCPs
• compares the predicted location of the GCP in the corrected coordinate space to the actual location of the GCP as chosen by the operator
RMS error = ((x’ - xorig)2 + (y’ - yorig)2)½
Evaluating Error

Week 3Geometric CorrectionSept. 20-24, 1999
# RMS error report:# -----ACTUAL----- ---POLYNOMIAL---# Point Cell-X Cell-Y Cell-X Cell-Y RMS# "1" 813.967 742.184 814.750 742.544 0.8616 # "2" 863.651 575.005 864.378 574.977 0.7278 # "3" 962.961 210.023 962.847 210.532 0.5214 # "4" 969.174 812.828 969.125 812.585 0.2483 # "5" 1039.732 845.143 1039.550 844.931 0.2792 # "6" 687.160 808.980 686.821 809.900 0.9808 # "7" 409.441 927.836 409.521 928.235 0.4063 # "8" 418.656 307.535 418.452 307.333 0.2871 # "9" 593.043 325.145 593.418 325.136 0.3756 # "10" 377.656 605.094 377.692 604.829 0.2668 # "11" 854.482 420.092 853.937 419.899 0.5785 # "12" 637.379 537.350 637.972 537.717 0.6976 # "13" 812.502 303.407 812.168 303.127 0.4363 # "14" 577.939 774.541 577.244 773.804 1.0132 # "15" 842.336 864.246 842.205 863.861 0.4068 ## Average RMS error : 0.539# Total RMS error : 8.087# End of GCP details
RMS Error

Week 3Geometric CorrectionSept. 20-24, 1999
Example of RMS Error
# RMS error report:# -----ACTUAL----- ---POLYNOMIAL---#Point Cell-X Cell-Y Cell-X Cell-Y RMS# "1" 813.967 742.184 814.750 742.544 0.8616
RMSerror = ((X’-Xorig)2 + ((Y’-Yorig)2)1/2
RMSerror = ((814.750-813.967)2 + ((742.544-742.184)2)1/2
RMSerror = 0.862

Week 3Geometric CorrectionSept. 20-24, 1999
Second Order:
y1 = a0 +a1x +a2y +a3xy + a4x2 + a5y2
Requires 6 GCPs to solve.
Requires 7 GCPs for RMS.
Third Order:
y1 = a0 +a1x +a2y +a3xy + a4x2 + a5y2 + a6x2y +a7xy2 +a8x3 +a9y3
Requires 10 GCPs to solve, 11 for RMS.
Higher Orders

Week 3Geometric CorrectionSept. 20-24, 1999
GCP Recommendations
• Always collect at least twice as many as are needed for the polynomial order you choose– 6 for 1st order– 12 for 2nd order– 20 for 3rd order
• Keep your average RMS error below 1 pixel.

Week 3Geometric CorrectionSept. 20-24, 1999
interpolation technique to determine which pixel from the uncorrected imagery goes where in the corrected imagery
• mismatch from transformation
3 Types:
• nearest neighbor
• bilinear
• cubic convolution
Resampling

Week 3Geometric CorrectionSept. 20-24, 1999
DN value in the corrected grid determined from the DN value of the pixel nearest to it in the uncorrected image
• computationally efficient
• does not alter the original input pixel value
features can be offset by a magnitude of ½ a pixel
resulting in a blocky or step-like appearance
• perfect for thematic or classified imagery, since classes are not modified
Nearest Neighbor Resampling

Week 3Geometric CorrectionSept. 20-24, 1999
Example of Nearest Neighbour

Week 3Geometric CorrectionSept. 20-24, 1999
Example of Nearest Neighbor
Above: before resampling
Below: after resampling

Week 3Geometric CorrectionSept. 20-24, 1999
assigns output pixel values by interpolating brightness values in two orthogonal directions in the input image
weighted average technique
more computationally intensive than nearest neighbor
should not be used for thematic or classified data
loss in image resolution due to smoothing or blurring effect
example - Richards
Bilinear Resampling

Week 3Geometric CorrectionSept. 20-24, 1999
Bilinear Interpolation Example
• Uses 3 interpolations over the 4 closest pixels that surround the point found on the image
•Performs a weighted average using a 2x2 array which is based on distance

Week 3Geometric CorrectionSept. 20-24, 1999
Example of Bilinear Interpolation
Output matrix
Geometrically correct
Image matrix - distorted

Week 3Geometric CorrectionSept. 20-24, 1999
Example of Bilinear Interpolation
Above: results of nearest neighbour resampling
Below: results of bilinear interpolation resampling

Week 3Geometric CorrectionSept. 20-24, 1999
• output DNs are assigned on the basis of a weighted average of input DNs from the 16 surrounding pixels
much less blurring than bilinear interpolation
higher computational cost
cubic polynomial fitted along the four lines of four pixels surrounding the point in the image to form four interpolants
5th order polynomial fitted through these
Cubic Convolution Resampling

Week 3Geometric CorrectionSept. 20-24, 1999
Example of Cubic Convolution
Output matrix
Geometrically correct
Image matrix - distorted

Week 3Geometric CorrectionSept. 20-24, 1999
Example of Cubic Convolution
Above: example of bilinear interpolation
Below: example of cubic convolution

Week 3Geometric CorrectionSept. 20-24, 1999
Summary of Resampling Methods
• Nearest neighbour - simple to compute, grey level unaltered. Disadvantages: image distorted, up to half a pixel offset
• Bilinear Interpolation - smooth image, geometrically accurate. Disadvantages: values are altered, possible blurring of the image, more computer intensive than nearest neighbour

Week 3Geometric CorrectionSept. 20-24, 1999
Summary of Resampling Methods
• Cubic Convolution - very smooth image. Disadvantages: DN values are altered, most computer intensive of the three sampling methods described

Week 3Geometric CorrectionSept. 20-24, 1999
Geometrically Corrected Image of Bogor
Corrected Image of Bogor - note that it is no longer oriented to the path of the satellite and has been rotated approx. 8°. It now has a defined datum and map projection.
Recommended