HASP HELIOS II 2013Undergraduate Space Research Symposium
University of Colorado Boulder
Presenters:Caleb Lipscomb and Jon Sobol
University of Colorado Boulder 2
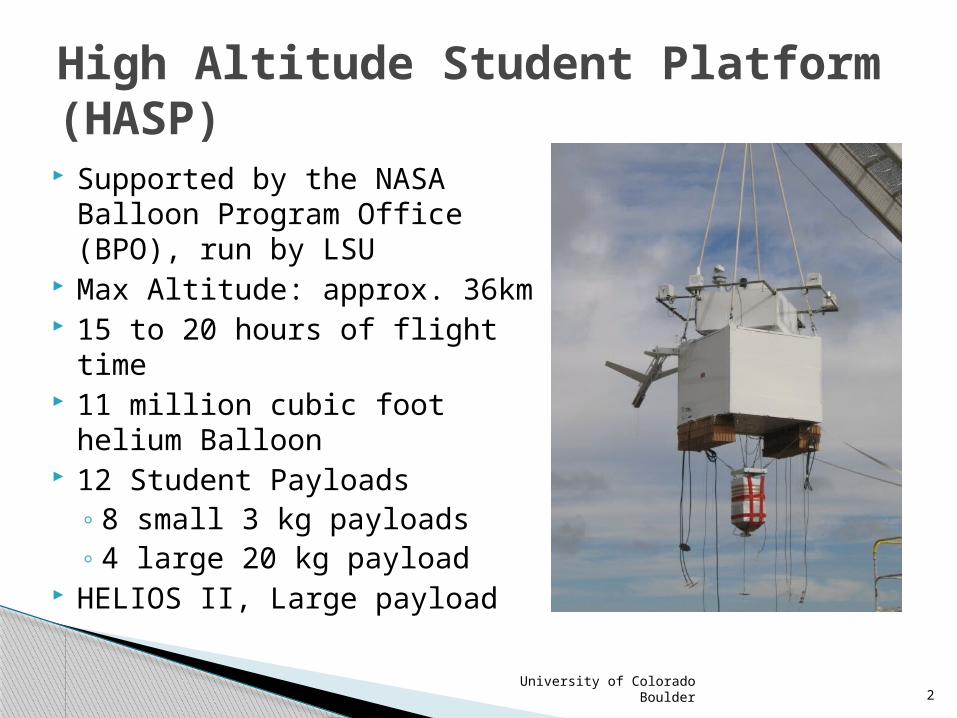
Supported by the NASA Balloon Program Office (BPO), run by LSU
Max Altitude: approx. 36km 15 to 20 hours of flight time 11 million cubic foot helium
Balloon 12 Student Payloads
◦ 8 small 3 kg payloads◦ 4 large 20 kg payload
HELIOS II, Large payload
High Altitude Student Platform (HASP)
University of Colorado Boulder 3
Orbital Platforms ◦ Expensive to develop and launch into space, cost
limits access.◦ Advanced Composition Explorer (ACE) – $106.8 Million◦ Solar and Hemispheric Observatory (SOHO) - $1.05
Billion Ground Based
◦ Face interference from the atmosphere, lowering the quality of the images
High Altitude Balloons◦ Low Cost ◦ Ascended above 99.5% of atmosphere
Current Solar Observation
University of Colorado Boulder 4
Mission Objectives:1. Observe and capture images of the Sun in
Hydrogen Alpha wavelength and to identify sun spots in those images.
2. Design and implement a system to locate the Sun in the sky and orient cameras towards the sun.
3. Prove the viability of high altitude balloon solar observation during a Colorado Space Grant Consortium (COSGC) sponsored HASP flight.
Hydrogen-Alpha Exploration with Light Intensity Observation
System (HELIOS II)
University of Colorado Boulder 5
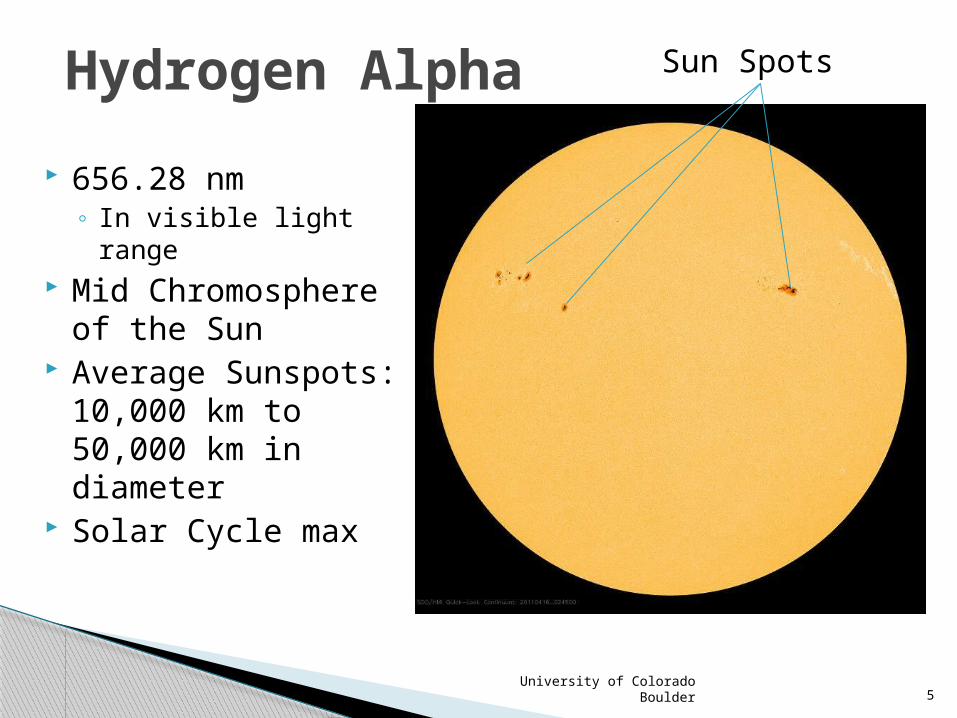
Hydrogen Alpha Sun Spots
656.28 nm◦ In visible light range
Mid Chromosphere of the Sun
Average Sunspots: 10,000 km to 50,000 km in diameter
Solar Cycle max
University of Colorado Boulder 6
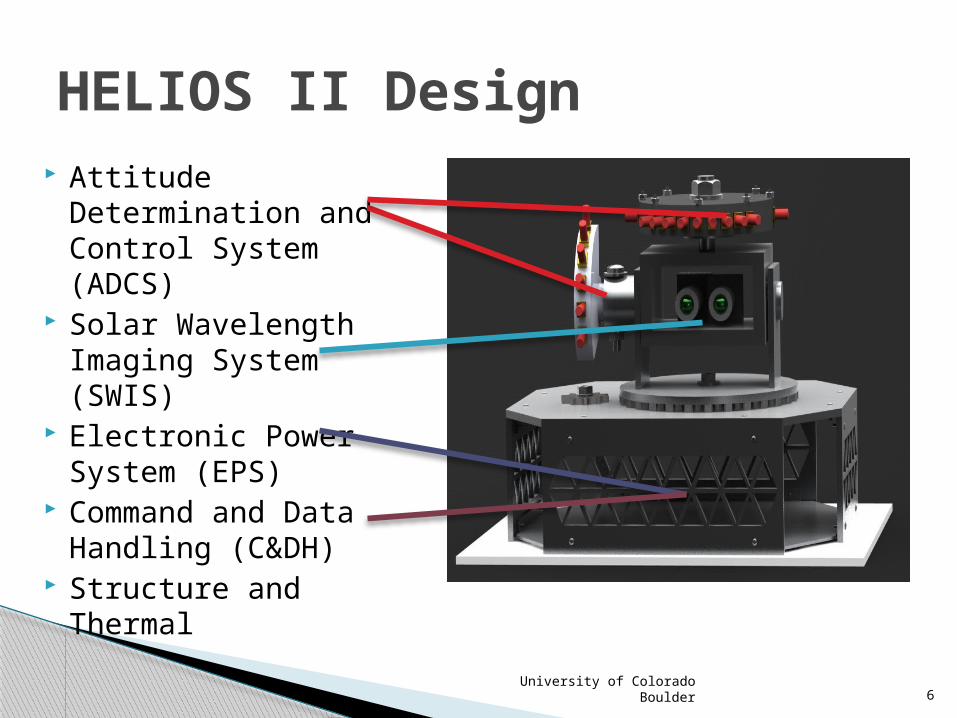
HELIOS II Design Attitude
Determination and Control System (ADCS)
Solar Wavelength Imaging System (SWIS)
Electronic Power System (EPS)
Command and Data Handling (C&DH)
Structure and Thermal
University of Colorado Boulder 7
2 cameras◦ Science Camera - Identify Sun Spots◦ ADCS Camera - Characterize performance of
Attitude Determination and Control System (ADCS)
Imaging Source “51”Series CCD Cameras ◦ 1600 x 1200 pixel CCD chip
Hydrogen Alpha filtration system
Solar Wavelength Imaging System (SWIS)
University of Colorado Boulder 8
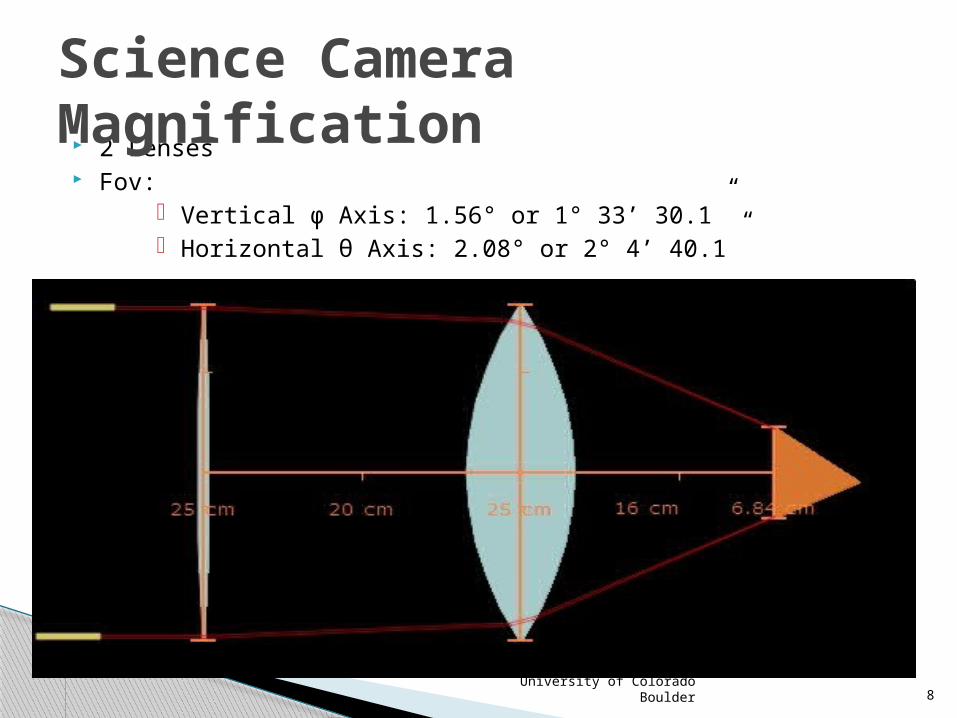
2 Lenses Fov:
Vertical ϕ Axis: 1.56° or 1° 33’ 30.1” Horizontal θ Axis: 2.08° or 2° 4’ 40.1”
Science Camera Magnification
University of Colorado Boulder 9
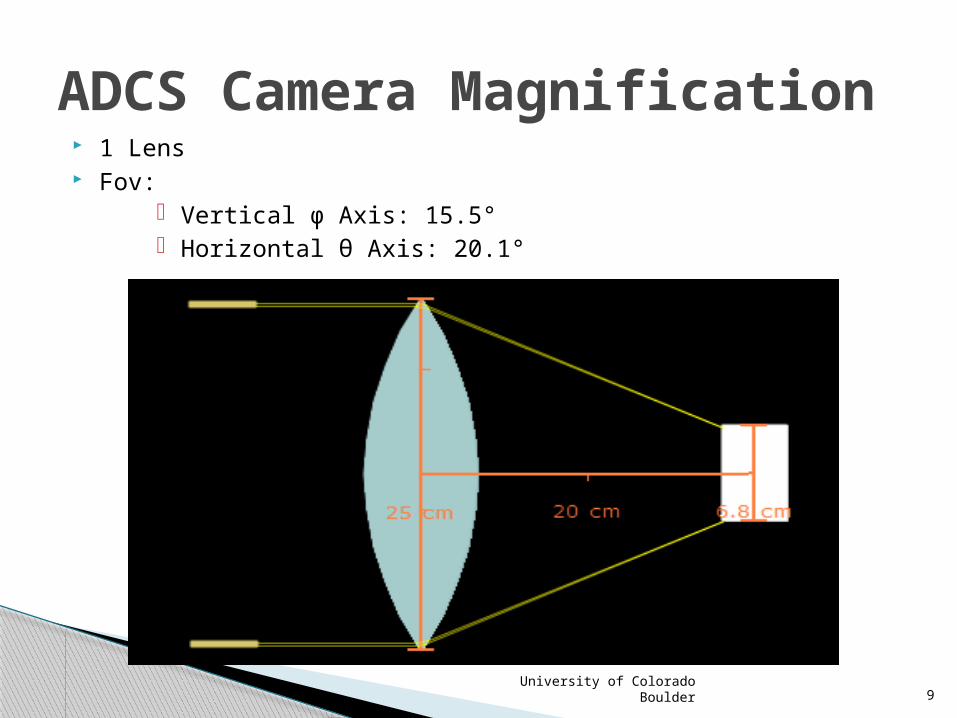
ADCS Camera Magnification 1 Lens
Fov: Vertical ϕ Axis: 15.5° Horizontal θ Axis: 20.1°
University of Colorado Boulder 10
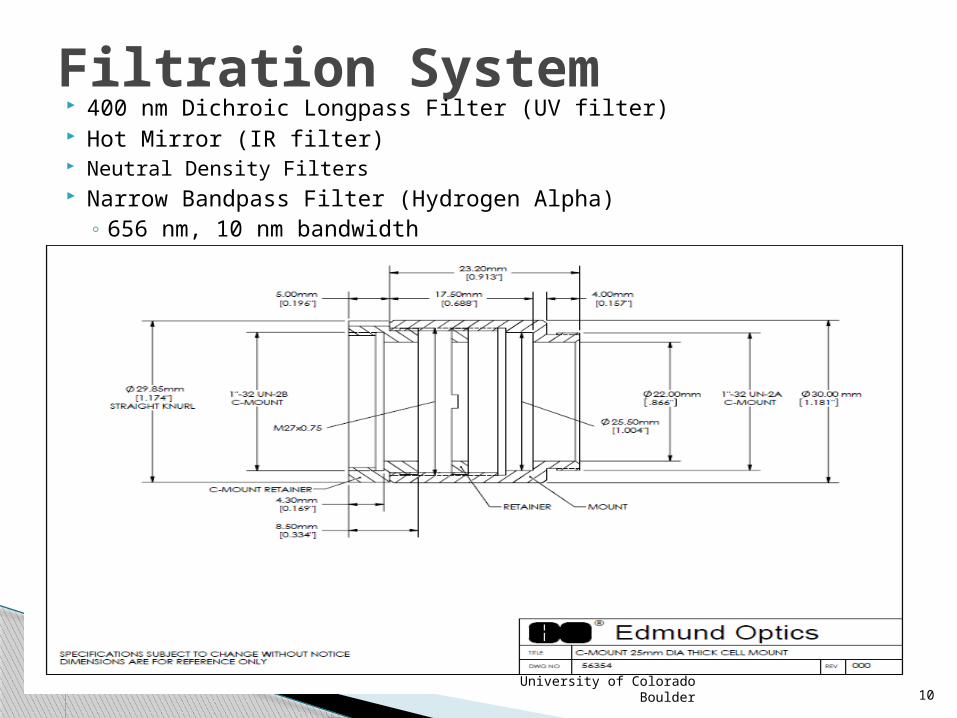
Filtration System 400 nm Dichroic Longpass Filter (UV filter) Hot Mirror (IR filter) Neutral Density Filters Narrow Bandpass Filter (Hydrogen Alpha)
◦ 656 nm, 10 nm bandwidth
University of Colorado Boulder 11
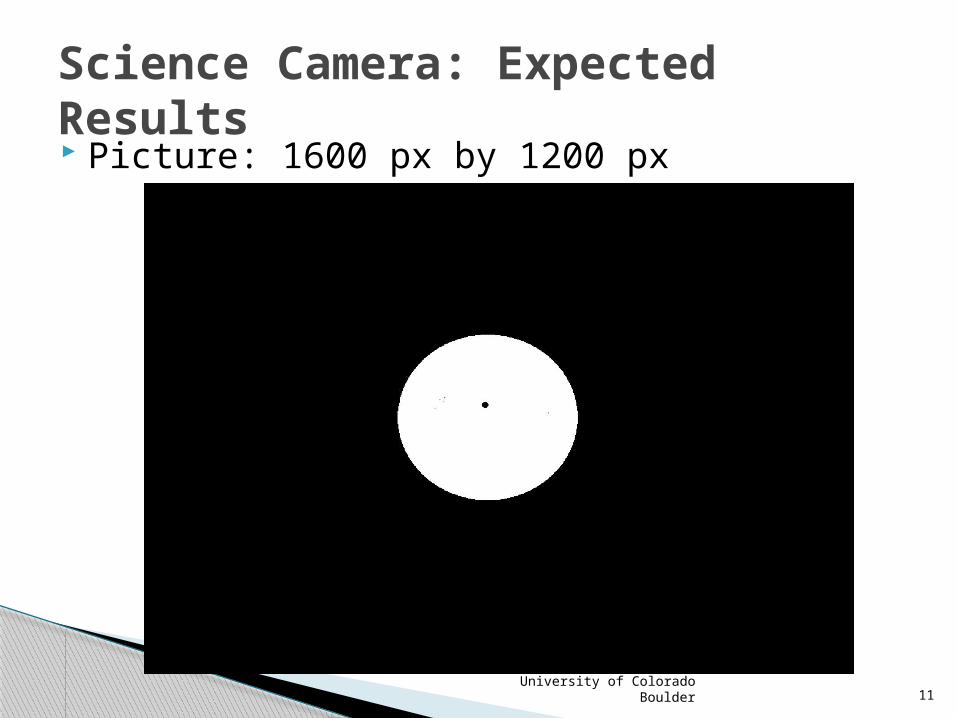
Picture: 1600 px by 1200 px
Science Camera: Expected Results
University of Colorado Boulder 12
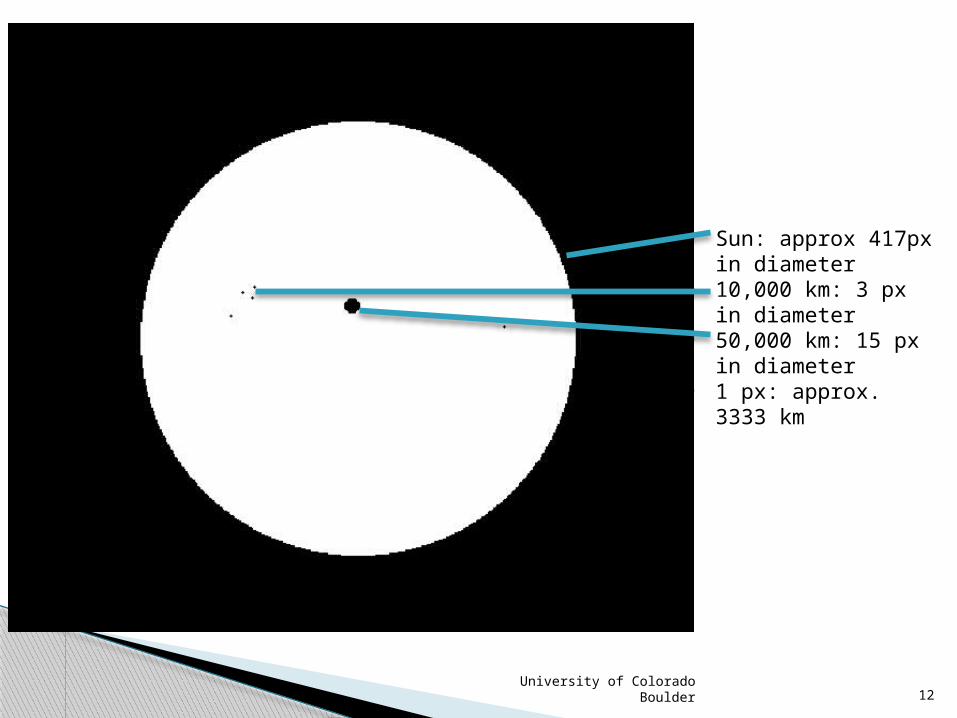
• Sun: approx 417px in diameter
• 10,000 km: 3 px in diameter
• 50,000 km: 15 px in diameter
• 1 px: approx. 3333 km
University of Colorado Boulder 1313
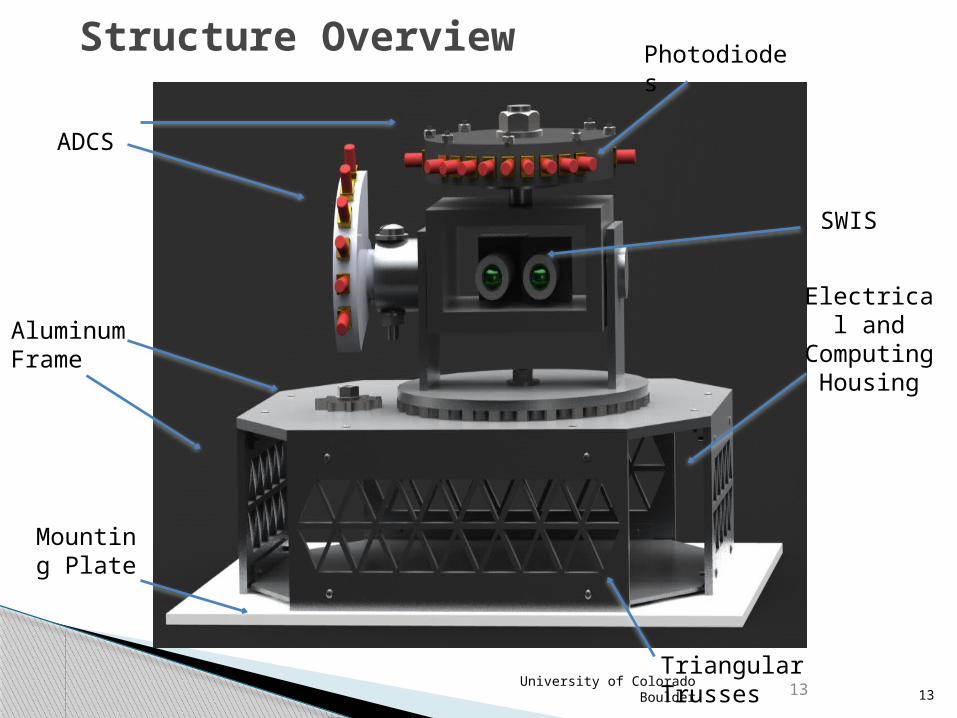
Aluminum Frame
Structure Overview
Triangular Trusses
SWIS
ADCS
Electrical and
Computing Housing
Mounting Plate
Photodiodes
University of Colorado Boulder 14
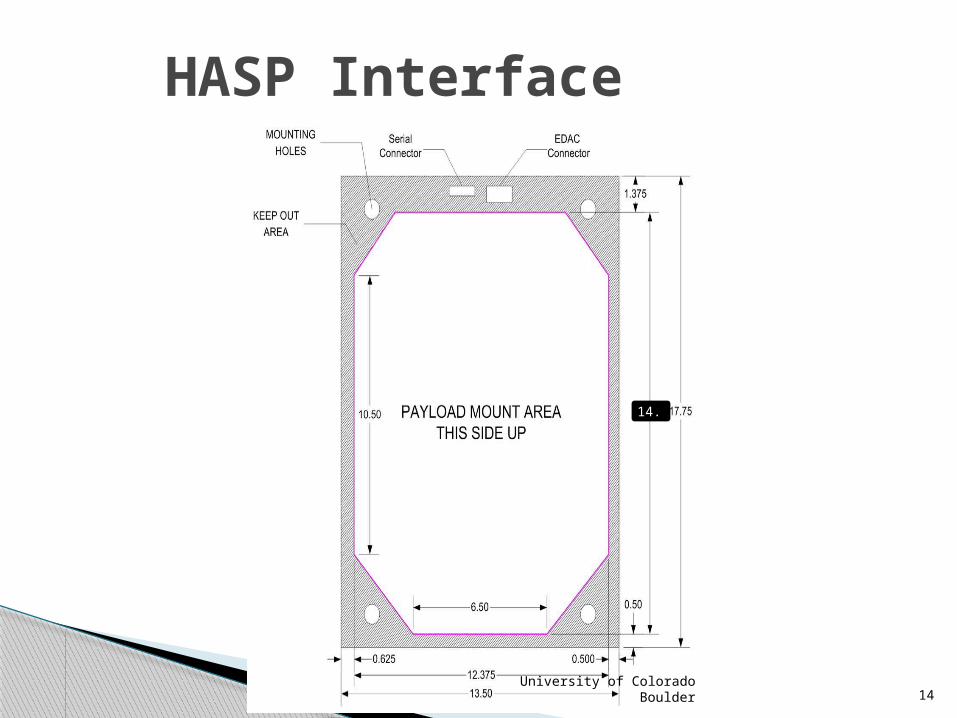
HASP Interface
14.9
University of Colorado Boulder 15
Motor drivers and CPU to be heat sinked to outer aluminum structure
Entire platform to be painted white◦ Higher emissivity◦ No reflective interference
Excess aluminum to be used in the electrical and computer housing structure to dissipate heat
Thermal
University of Colorado Boulder 16
Electrical and Power Systems (EPS)
Power Provided by HASP Platform◦ EDAC 512 connector◦ 30 Volts at 2.5 Amps
Converts HASP power to power required by payload systems
Arduino Due◦ Monitor current and voltage◦ MOSFETs
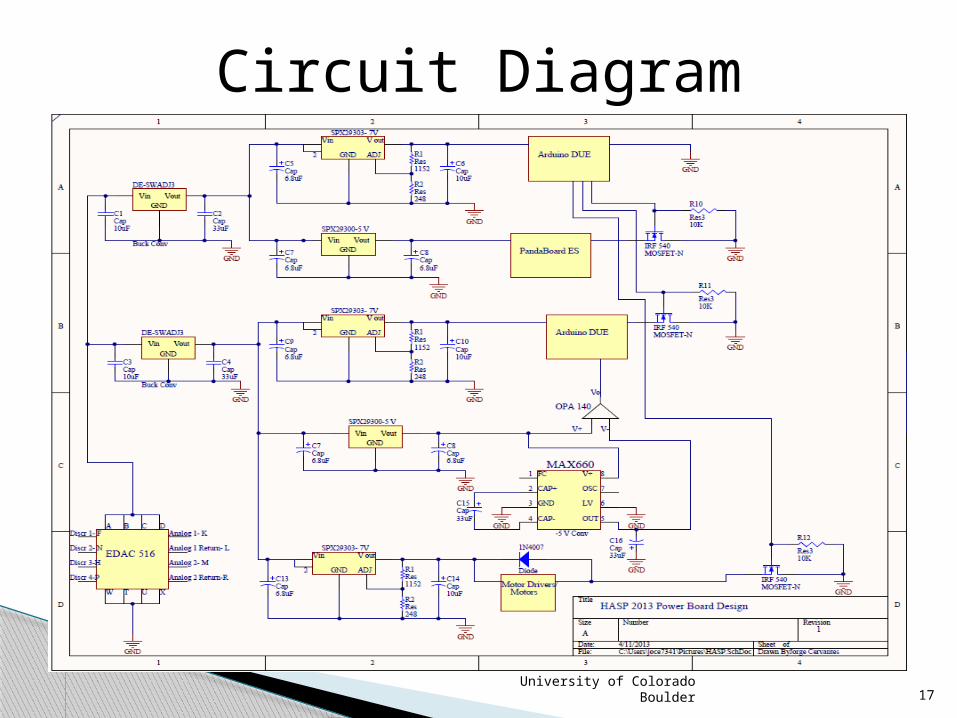
University of Colorado Boulder 17
Circuit Diagram
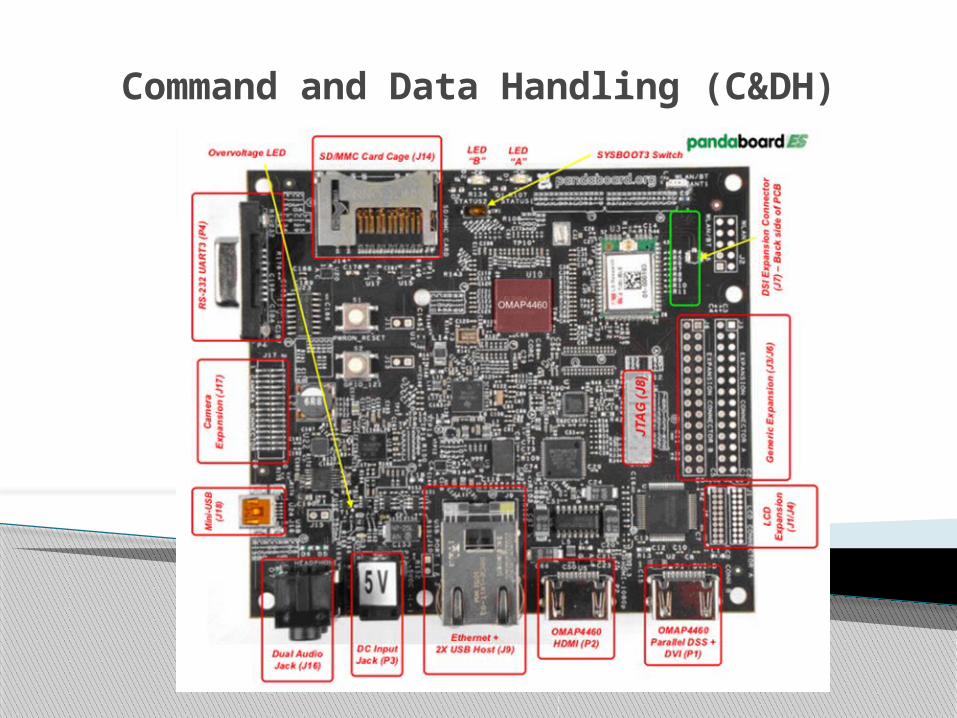
Command and Data Handling (C&DH)
University of Colorado Boulder 19
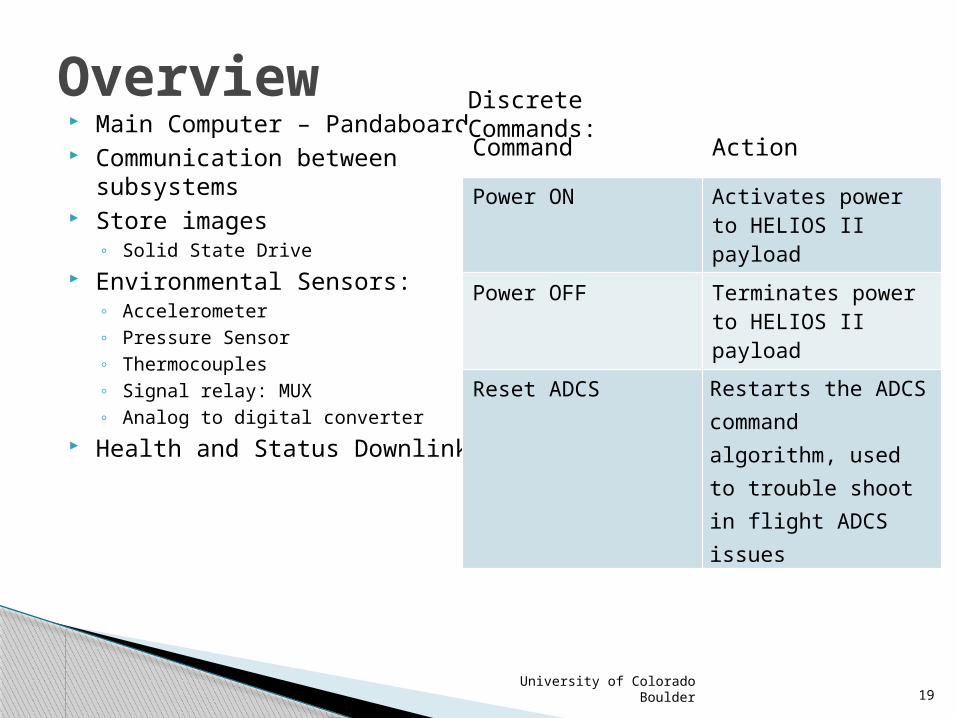
Main Computer – Pandaboard Communication between
subsystems Store images
◦ Solid State Drive Environmental Sensors:
◦ Accelerometer◦ Pressure Sensor ◦ Thermocouples◦ Signal relay: MUX◦ Analog to digital converter
Health and Status Downlink
OverviewCommand ActionPower ON Activates power to
HELIOS II payload
Power OFF Terminates power to HELIOS II payload
Reset ADCS Restarts the ADCS command algorithm, used to trouble shoot in flight ADCS issues
Discrete Commands:
University of Colorado Boulder 20
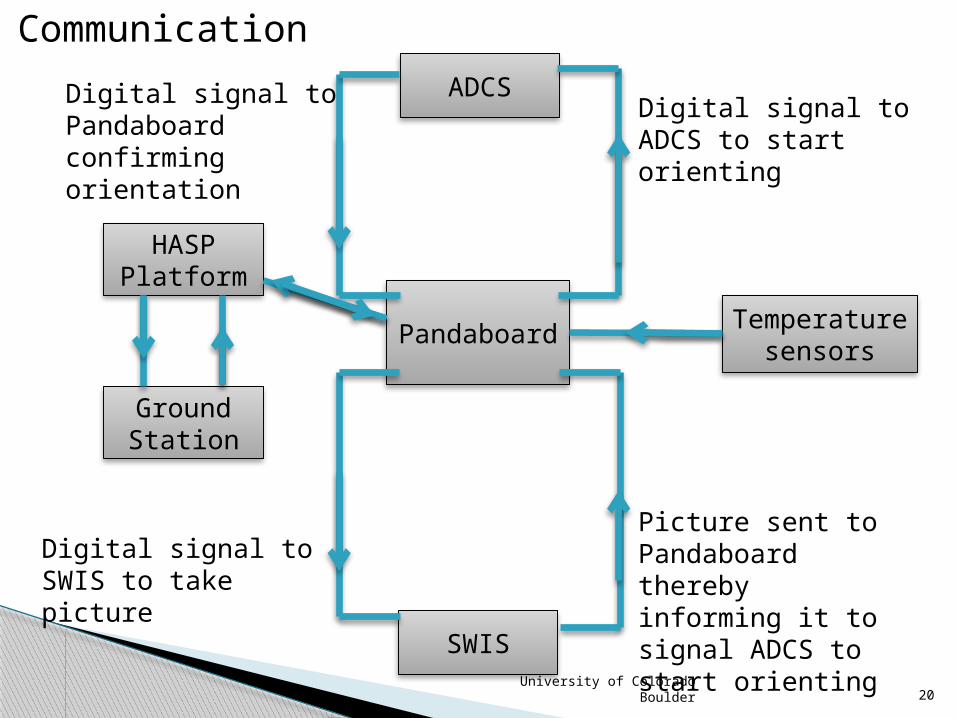
Pandaboard
ADCS
SWIS
Digital signal to ADCS to start orienting
Digital signal to Pandaboard confirming orientation
Digital signal to SWIS to take picture
Picture sent to Pandaboard thereby informing it to signal ADCS to start orienting
HASP Platform
Ground Station
Temperature sensors
Communication
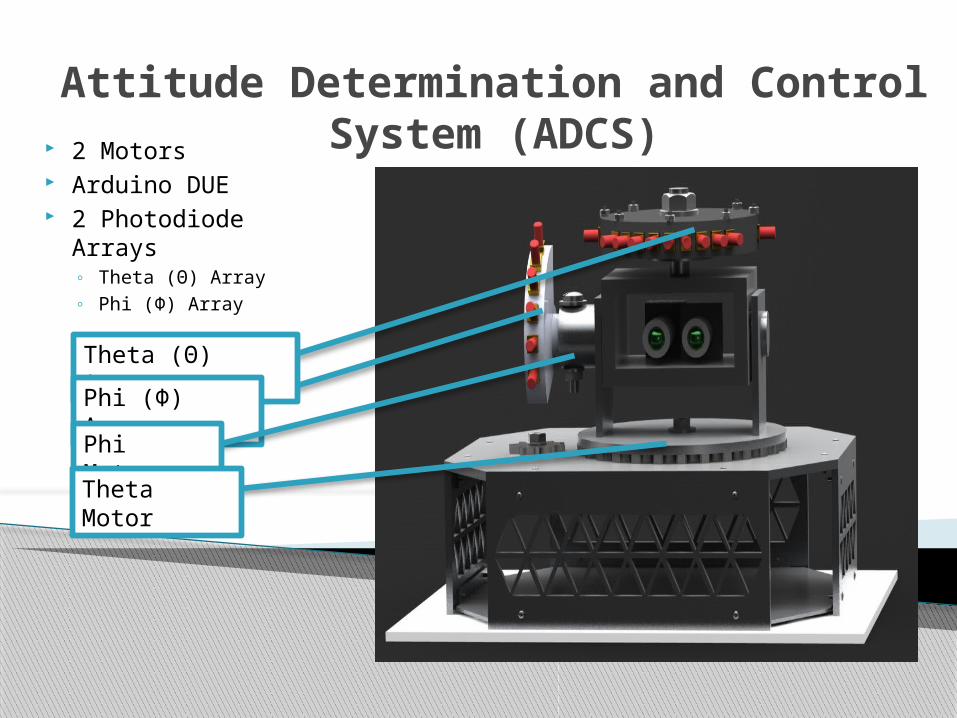
Attitude Determination and Control System (ADCS) 2 Motors
Arduino DUE 2 Photodiode Arrays
◦ Theta (Θ) Array◦ Phi (Φ) Array
Theta (Θ) ArrayPhi (Φ) ArrayPhi MotorTheta Motor
University of Colorado Boulder 22
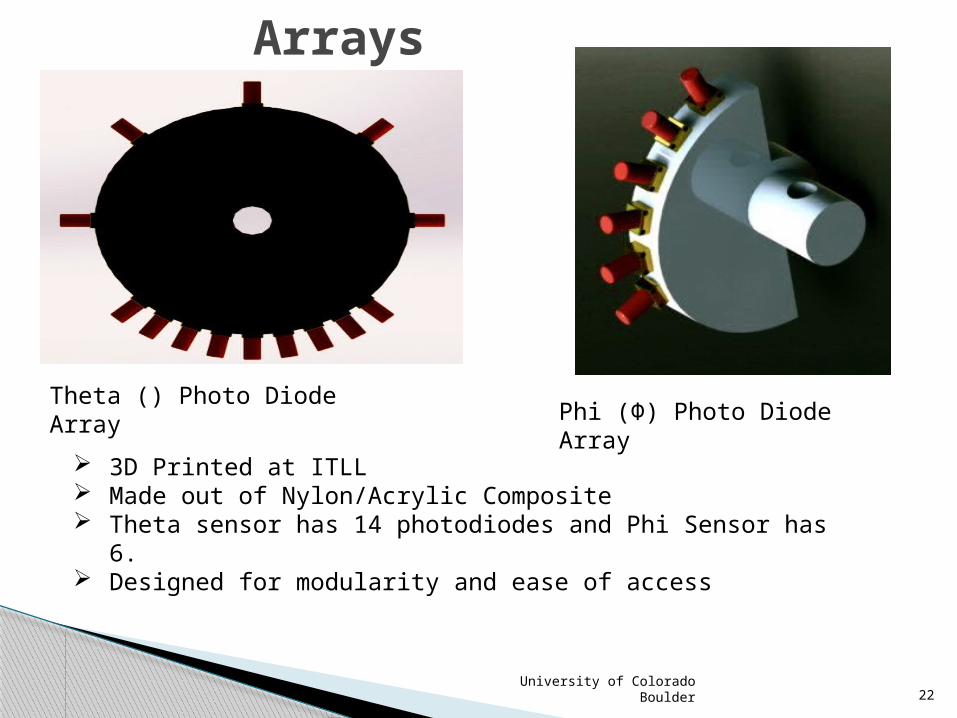
Arrays
3D Printed at ITLL Made out of Nylon/Acrylic Composite Theta sensor has 14 photodiodes and Phi Sensor has 6. Designed for modularity and ease of access
Theta () Photo Diode Array Phi (Φ) Photo Diode Array
University of Colorado Boulder 23
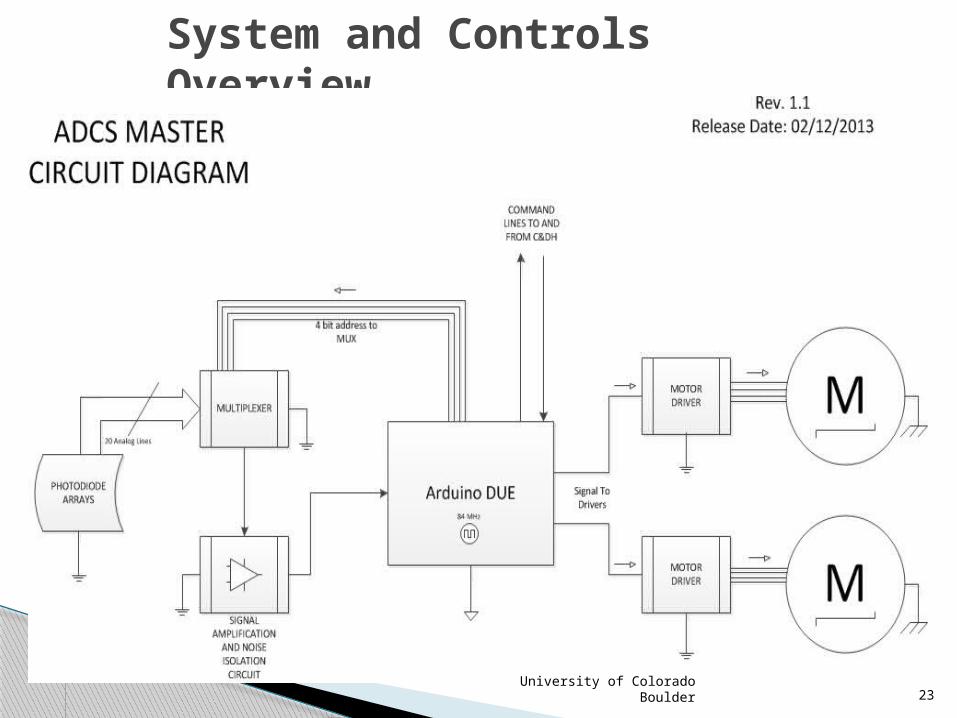
System and Controls Overview
University of Colorado Boulder 24
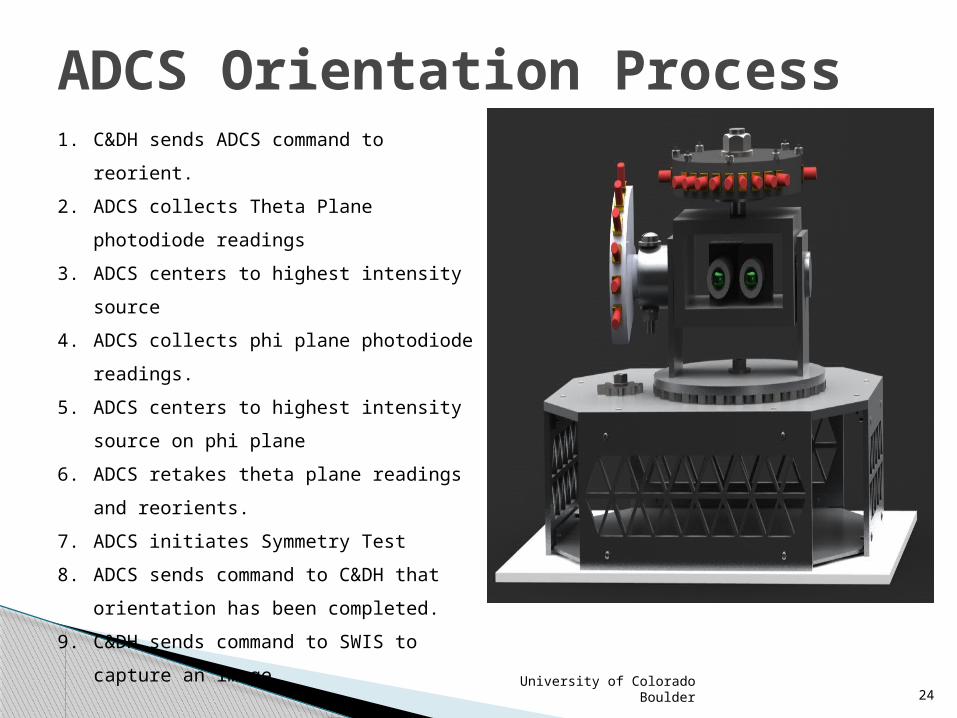
ADCS Orientation Process1. C&DH sends ADCS command to reorient.2. ADCS collects Theta Plane photodiode
readings3. ADCS centers to highest intensity source4. ADCS collects phi plane photodiode
readings.5. ADCS centers to highest intensity source
on phi plane6. ADCS retakes theta plane readings and
reorients.7. ADCS initiates Symmetry Test 8. ADCS sends command to C&DH that
orientation has been completed.9. C&DH sends command to SWIS to
capture an image
University of Colorado Boulder 25
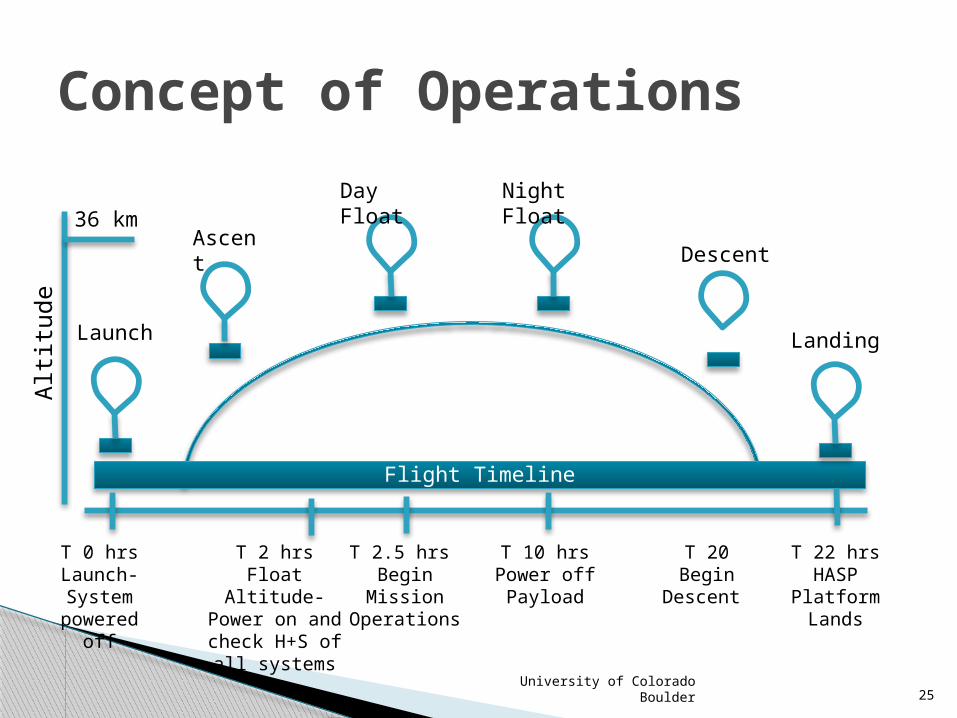
Concept of Operations
Flight Timeline
Day Float Night Float
Descent
LandingLaunch
Ascent
T 0 hrsLaunch- System powered
off
T 2 hrsFloat Altitude- Power on and check H+S of all systems
T 10 hrsPower off Payload
T 2.5 hrs Begin
Mission Operations
T 22 hrsHASP
Platform Lands
36 km
Altit
ude
T 20Begin Descent
University of Colorado Boulder 26
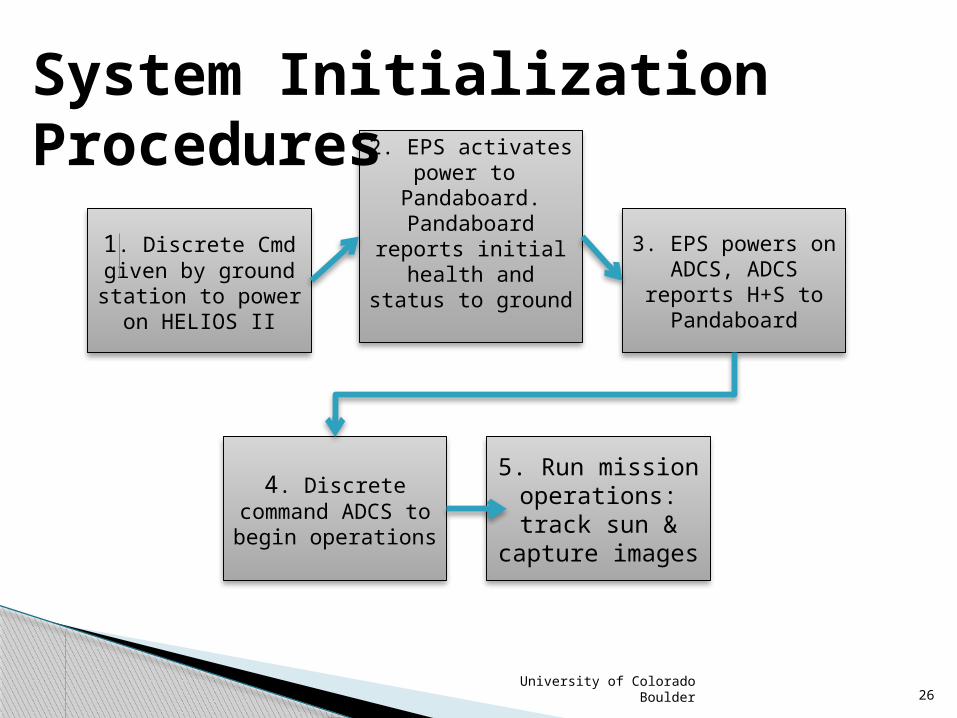
1. Discrete Cmd given by ground station to power
on HELIOS II
2. EPS activates power to
Pandaboard. Pandaboard
reports initial health and status
to ground
3. EPS powers on ADCS, ADCS
reports H+S to Pandaboard
4. Discrete command ADCS to begin operations
5. Run mission operations: track
sun & capture images
System Initialization Procedures
University of Colorado Boulder 27
Current Flight date: August 26 Identify at least one sun spot
◦ Observe same sun spot in 3 separate pictures ADCS success:
◦ Observe sun in 10% of Science camera images◦ Exact performance characterized by ADCS
camera Prove viability of high altitude balloon
observatories
Flight and Results

University of Colorado Boulder 28
Questions?
Recommended






![Hydrogen-Alpha Exploration with Light Intensity Observation Systems (HELIOS) II Final ...laspace.lsu.edu/hasp/groups/2013/science_report/Payload... · 2013-12-15 · [Type text] 1](https://img.pdfslide.us/doc/110x75/5f54aae2cedc2273804cda0f/hydrogen-alpha-exploration-with-light-intensity-observation-systems-helios-ii.jpg)


![Hillside Agriculture Sub-Project [HASP]](https://img.pdfslide.us/doc/110x75/627b6d82bef92b7d1806c9de/hillside-agriculture-sub-project-hasp.jpg)







