
ECIV 720 A Advanced Structural
Mechanics and Analysis
Lecture 12: Isoparametric CST
Area CoordinatesShape FunctionsStrain-Displacement MatrixRayleigh-Ritz FormulationGalerkin Formulation

FEM Solution: Area Triangulation
Area is Discretized into Triangular Shapes

FEM Solution: Area Triangulation
One Source of Approximation

FEM Solution: Nodes and Elements
Points where corners of triangles meet
Define NODES

Non-Acceptable Triangulation
…
Nodes should be defined on corners of ALL adjacent triangles

FEM Solution: Nodes and Elements
Each node translates in X and Y
ui
vi
X
Y

FEM Solution: Objective
• Use Finite Elements to Compute Approximate Solution At Nodes
1 (x1,y1)2 (x2,y2)
3 (x3,y3)
q6
q5
q4
q3
q1
q2
vu
• Interpolate u and v at any point from Nodal values q1,q2,…q6
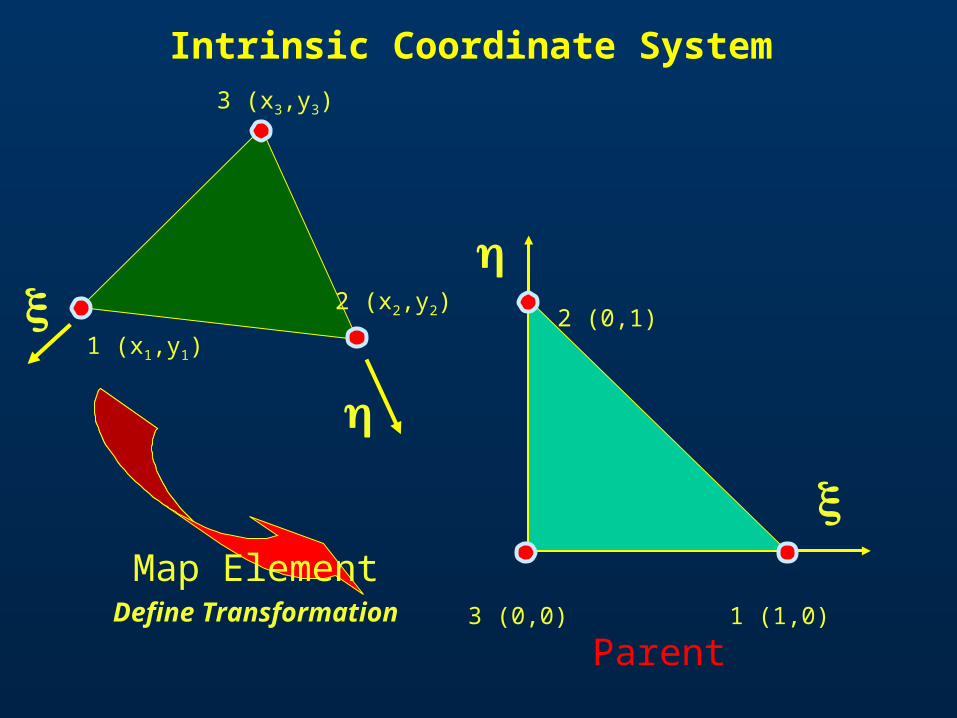
Intrinsic Coordinate System3 (x3,y3)
2 (x2,y2)
1 (x1,y1)
3 (0,0) 1 (1,0)
2 (0,1)
Map ElementDefine Transformation
Parent
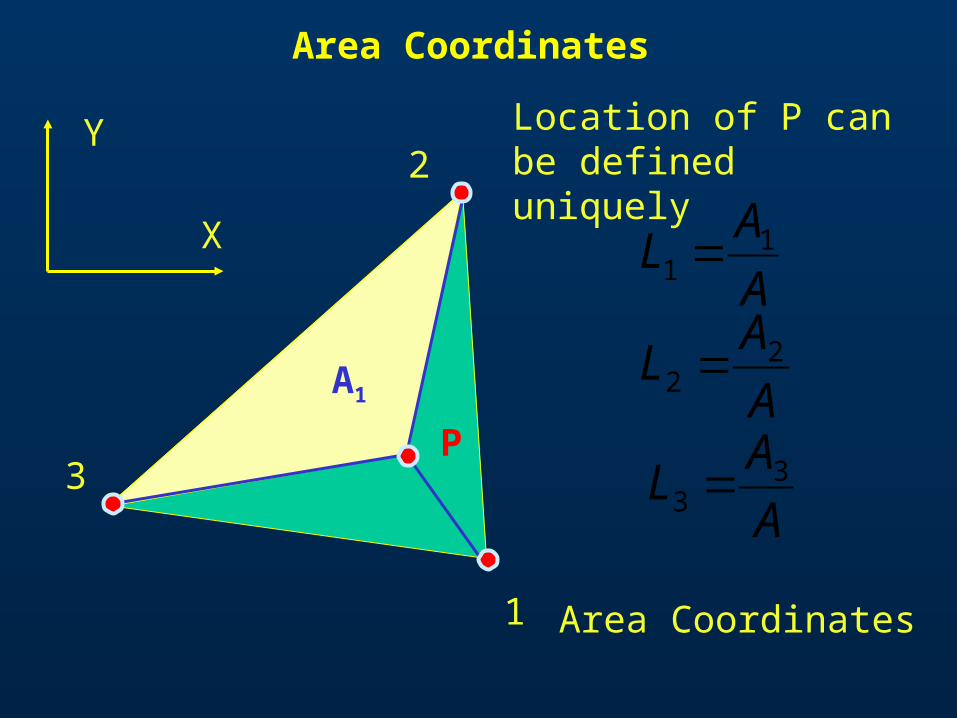
Area Coordinates
A1
A
AL 1
1
A
AL 2
2
A
AL 3
3
1
2
3P
Area Coordinates
X
Y Location of P can be defined uniquely

Area Coordinates and Shape Functions
1L 2L 13L3 (x3,y3)
2 (x2,y2)1 (x1,y1)
Area Coordinates are linear functions of and
Are equal to 1 at nodes they correspond to
Are equal to 0 at all other nodes
3 (0,0) 1 (1,0)
2 (0,1)
Natural Choice for Shape Functions
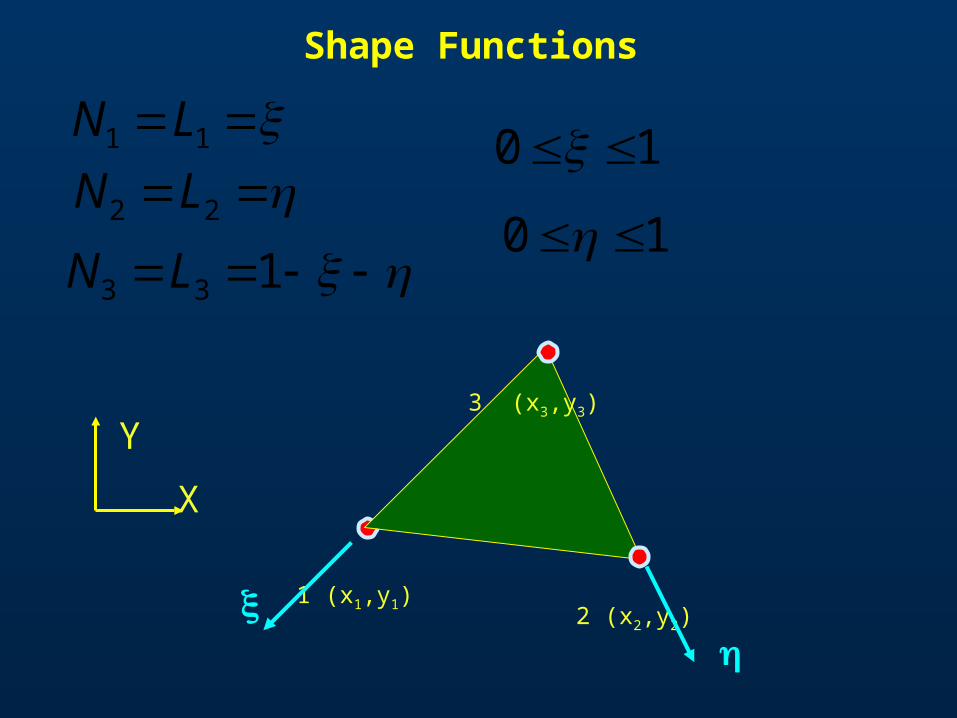
Shape Functions
11 LN
22 LN
133 LN
X
Y
10
10
1 (x1,y1)2 (x2,y2)
3 (x3,y3)

Geometry from Nodal Values
332211 xNxNxNx
332221 yNyNyNy
11 LN
22 LN
133 LN
32313
33231
xxx
xxxxxx
32313
33231
yyy
yyyyyy

Intrinsic Coordinate System
32313 xxxx
Map ElementTransformation
3 (0,0) 1 (1,0)
2 (0,1)
Parent
3 (x3,y3)
2 (x2,y2)
1 (x1,y1)
32313 yyyy

Displacement Field from Nodal Values
533211 qNqNqNu
634221 qNqNqNv
12
3q6
q5
q4
q3
q2
q1
vu
Nqu
6
5
4
3
2
1
321
321
000
000
q
q
q
q
q
q
NNN
NNN

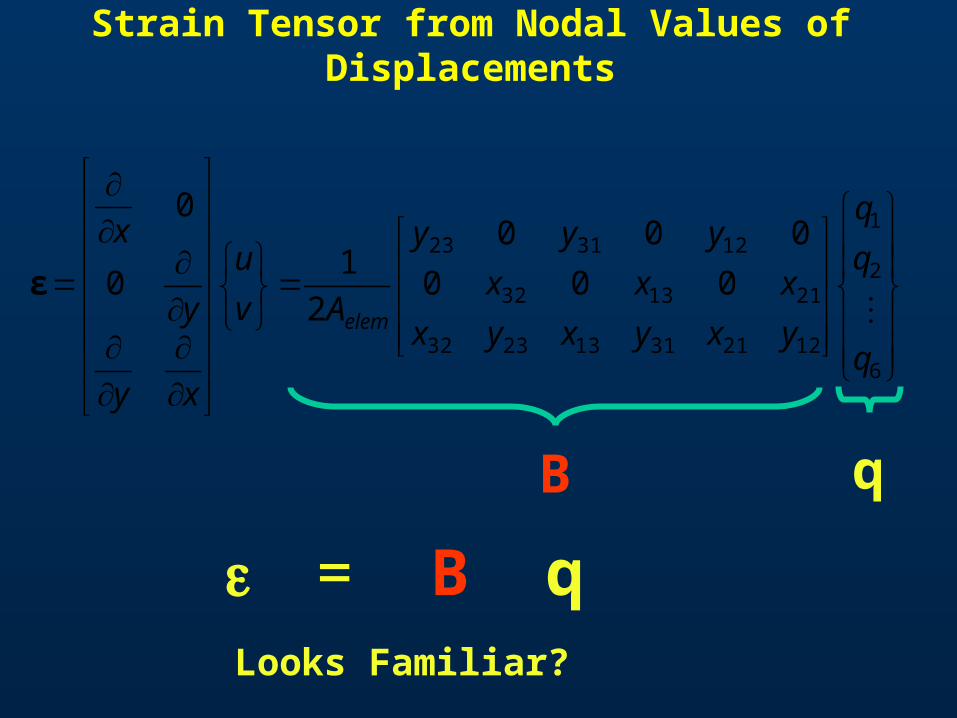
Strain Tensor from Nodal Values of Displacements
x
v
y
uy
vx
u
ε
y
v
x
v
x
u
y
u
Strain Tensor Need Derivatives
533211 qNqNqNu
634221 qNqNqNv
u and v functions of and

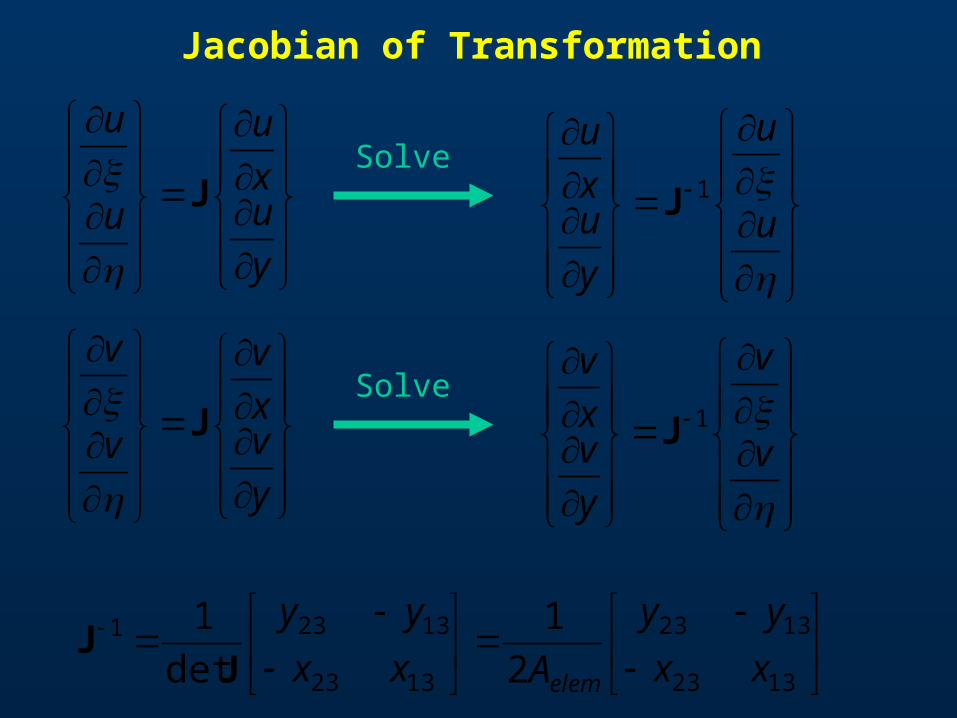
Jacobian of Transformation
y
y
ux
x
uu
y
y
ux
x
uu
y
y
vx
x
vv
y
y
vx
x
vv
y
ux
u
yx
yx
u
u
y
vx
v
yx
yx
v
v
J
J
Jacobian of Transformation

Jacobian of Transformation – Physical Significance
yx
yx
J
32313 xxxx 32313 yyyy
13xx
23x
x
13y
y
23y
y
2323
1313
yx
yxJ

Jacobian of Transformation – Physical Significance
3 (x3,y3)
2 (x2,y2)
1 (x1,y1)
r1 r2
jir 31311 yyxx
jir 32322 yyxx
k
kji
rr2323
1313
2323
131321
0
0yx
yx
yx
yx

Jacobian of Transformation – Physical Significance
3 (x3,y3)
2 (x2,y2)
1 (x1,y1)
r1 r2
krr2323
131321 yx
yx
k
elemA2det J
elemA2
2323
1313
yx
yxJ
Compare to Jacobian
Jacobian of Transformation
y
ux
u
u
u
J
1323
1323
1323
13231
2
1
det
1xx
yy
Axx
yy
elemJJ
u
u
y
ux
u
1JSolve
y
vx
v
v
v
J
v
v
y
vx
v
1JSolve

Strain Tensor from Nodal Values of Displacements
51
6
2
1
321 000 qq
q
q
q
NNNu
53
6
2
1
321 000 qq
q
q
q
NNNu
1N 2N 13N

Strain Tensor from Nodal Values of Displacements
62
6
2
1
321 000 qq
q
q
q
NNNv
64
6
2
1
321 000 qq
q
q
q
NNNv
Strain Tensor from Nodal Values of Displacements
6
2
1
122131132332
211332
123123
000
000
2
10
0
q
q
q
yxyxyx
xxx
yyy
Av
u
xy
y
x
elem ε
= B q
B q
Looks Familiar?

Strain-Displacement Matrix
6
2
1
122131132332
211332
123123
000
000
2
1
q
q
q
yxyxyx
xxx
yyy
Aelemxy
y
x
ε
Is constant within each element - CST
1 (x1,y1) 2 (x2,y2)
3 (x3,y3)
jiij yyy jiij xxx

Stresses
xy
y
x
xy
y
xE
2
100
01
01
1 2
Dεσ = B q
DBqσ

Element Stiffness Matrix ke
eV
Te dVU σDε
2
1
= B q= D B qe
e
A
TTe
el
TTe
e
dAt
tdA
U
e
qDBBq
qDBBq
2
1
2
1
ke
1 (x1,y1) 2 (x2,y2)
3 (x3,y3)
tdAdV

x
y
z
P
Formulation of Stiffness EquationsT (force/area)
Tt (force/length)
P
Assume
Plane
Stress
x
y
t

Total Potential Approach
i
iTiS
T
V
T
V
T dSdVdV PuTufuεσ2
1
P
Tt (force/length)
Total Potential

Total Potential Approach
i
iTiS
T
V
T
V
T dSdVdV PuTufuεσ2
1
P
Tt (force/length)
ii
Ti
el
T
eA
T
eA
T
ee
e
tdltdA
tdA
PuTufu
Dεε2
1

Total Potential Approach
ii
Ti
el
T
eA
T
eA
T
e
e
e
tdl
tdA
tdA
Pu
Tu
fu
Dεε2
1
eeTe
e
A
TTe
el
TTe
e
dAt
tdA
U
e
qkq
qDBBq
qDBBq
2
1
2
1
2
1

Total Potential Approach
ii
Ti
el
T
eA
T
eA
T
e
e
e
tdl
tdA
tdA
Pu
Tu
fu
Dεε2
1
Work Potential
of Body Forces
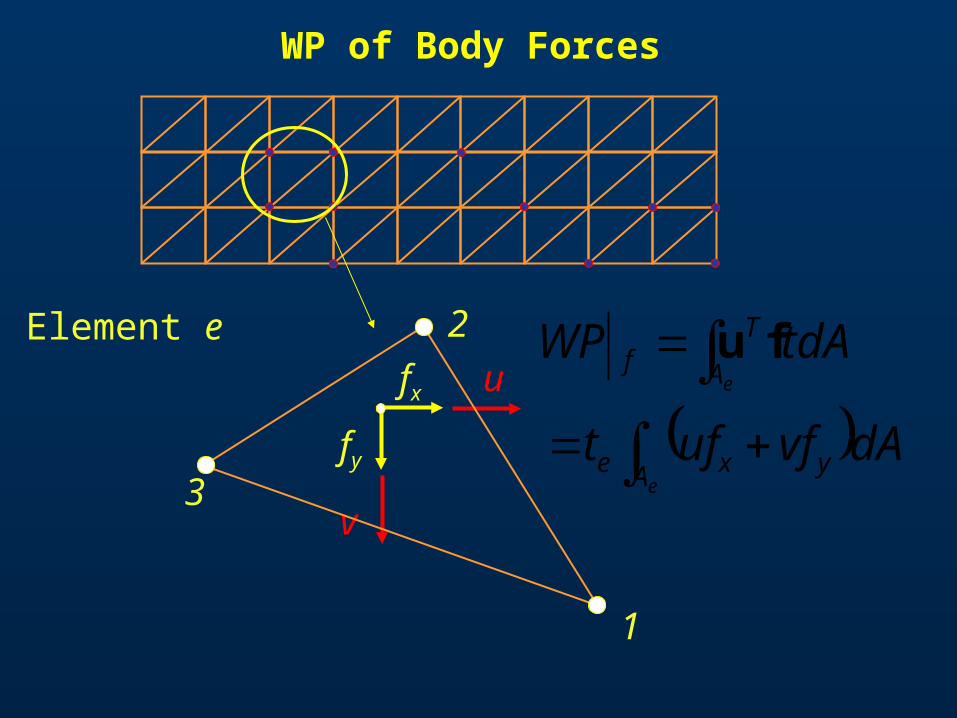
WP of Body Forces
eA
Tf tdAWP fu
fy
fx u
v
eA yxe dAvfuft
Element e
3
1
2

WP of Body Forces
eA yxef dAvfuftWP
533211 qNqNqNu
634221 qNqNqNv
12
3q6
q5
q4
q3
q2
q1
vu
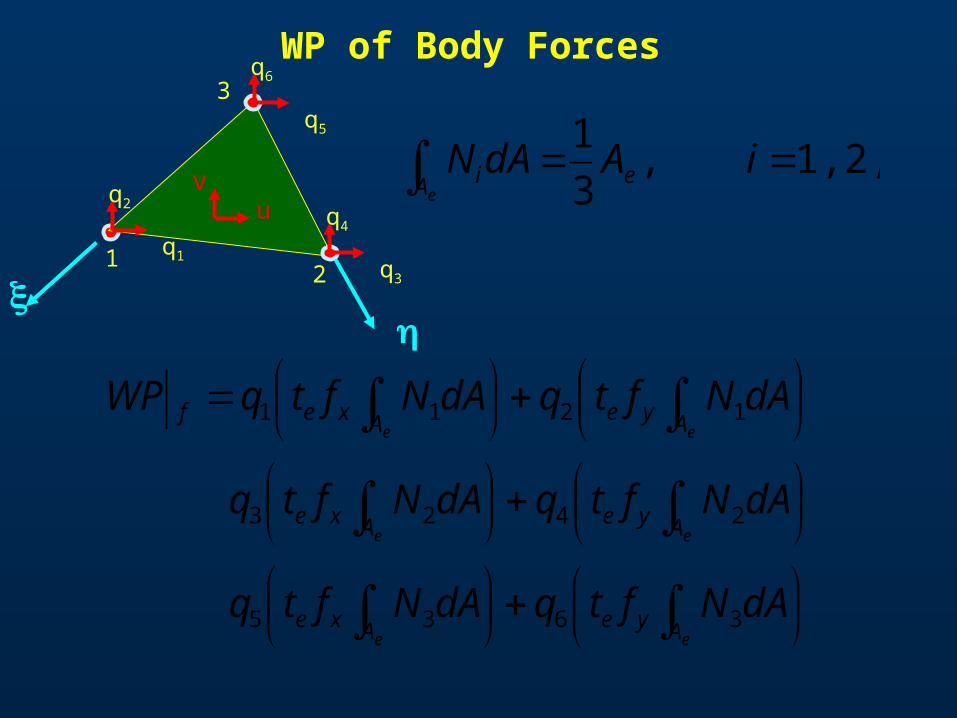
WP of Body Forces
ee
ee
ee
AyeAxe
AyeAxe
AyeAxef
dANftqdANftq
dANftqdANftq
dANftqdANftqWP
3635
2423
1211
12
3q6
q5
q4
q3
q2
q1
vu
1,2,3 ,3
1 iAdAN eA i
e

WP of Body Forces
y
x
y
x
ee
eT
A
Tf
f
f
f
f
Atqqq
tdAWPe
3621
fqfu
Nodal Equivalent
Body Force Vector

Total Potential Approach
ii
Ti
el
T
eA
T
eA
T
e
e
e
tdl
tdA
tdA
Pu
Tu
fu
Dεε2
1
Work Potential
of Tractions

WP of Traction
Tt (force/length)
Distributed Load acting on EDGE of element
3
1
2

WP of Traction
Components
Tx1,Ty1
Tx2,Ty2
Known Distribution
Normal Pressure
p1, p2 Known Distribution

WP of Traction
Normal Pressure
p1, p2 Known Distribution
11 cpTx
11 spTy
Tx1
Ty1
22 cpTx
22 spTy
Tx2
Ty2221
22121 yxl
2121 /cos lyc
2112 /sin lxs
Directional cos
Components

WP of Traction
3
1
2
Tx
Ty
21l
TT tdlWP Tu
21l
yxe dAvTuTt
u
v

Tx1
Ty1
Tx2
Ty2
WP of Traction
3
1
2
21l
TT tdlWP Tu
21l
yxe dAvTuTt
533211 qNqNqNu
634221 qNqNqNv
2211 xxx TNTNT
2211 yyy TNTNT
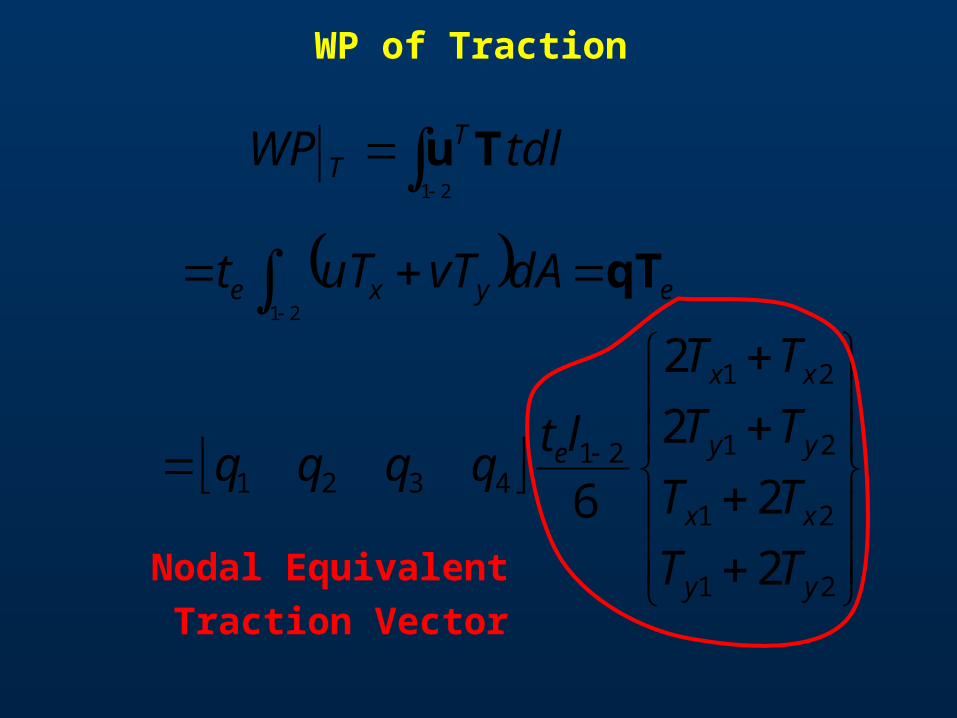
WP of Traction
21l
TT tdlWP Tu
el yxe dAvTuTt qT 21
21
21
21
21
214321
2
2
2
2
6
yy
xx
yy
xx
e
TT
TT
TT
TT
ltqqqq
Nodal Equivalent
Traction Vector

Total Potential Approach
ii
Ti
el
T
eA
T
eA
T
e
e
e
tdl
tdA
tdA
Pu
Tu
fu
Dεε2
1
Work Potential
of Concentrated Loads

WP of Concentrated Loads
P
yiixiiiTiP PvPuWP
i Pu
Indicates that at location of point loads
a node must be defined

In Summary
ii
Ti
el
T
eA
T
eA
T
e
e
e
tdl
tdA
tdA
Pu
Tu
fu
Dεε2
1
ii
Ti
ee
Te
ee
Te
eee
Te
PQ
Tq
fq
qkq2
1

After Superposition
ii
Ti
ee
Te
ee
Te
eee
Te
PQ
Tq
fq
qkq2
1
PTfF
FQKQQ
e
ee
TT
where2
1
FKQ 0
Minimizing wrt Q

Galerkin Approach
P
Tt (force/length)
Galerkin
i
iTiS
T
V
T
V
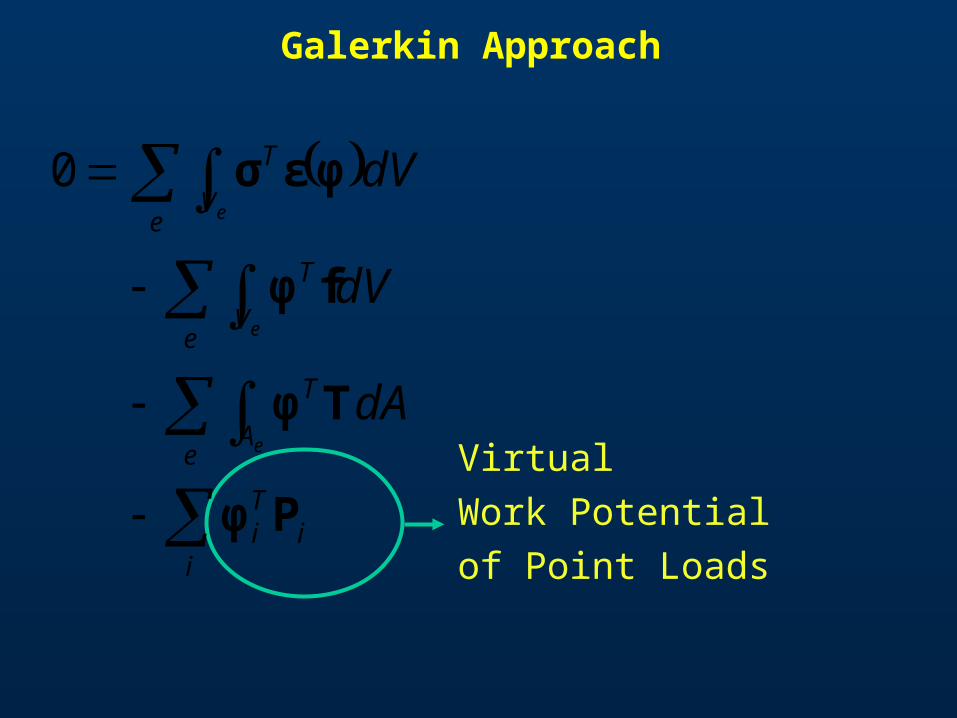
T dSdVdV PφTφfφφεσ 0

Galerkin Approach
P
Tt (force/length)
ii
Ti
el
T
eA
T
eA
T
ee
e
tdltdA
tdA
PφTφfφ
φDεε 0
i
iTiS
T
V
T
V
T dSdVdV PφTφfφφεσ 0

Galerkin Approach
Introduce Virtual Displacement Field
12
36
5
4
3
2
1
y
x
Nψφ
Bψφε
6
2
1
ψ

Galerkin Approach
ii
Ti
eA
T
eV
T
eV
T
e
e
e
dA
dV
dV
Pφ
Tφ
fφ
φεσ 0eU
Virtual Strain Energy
of element e

Element Stiffness Matrix ke
ke
1 (x1,y1) 2 (x2,y2)
3 (x3,y3)
e
A
TTe
el
TTe
e
dAt
tdA
U
e
qDBBψ
qDBBψ
eeTeeU qkψ
= B e= D B qe
tdAdV
eA
Te dVU φεσ
eNψφ

Galerkin Approach
Virtual
Work Potential
of Body Forces
ii
Ti
eA
T
eV
T
eV
T
e
e
e
dA
dV
dV
Pφ
Tφ
fφ
φεσ 0

WP of Body Forces
eA
Tf tdAWP fφ
fy
fx x
y
eA yyxxe dAfft
Element e
3
1
2
As we have already seen
Nψφ

WP of Body Forces
y
x
y
x
ee
eT
A
Tf
f
f
f
f
At
tdAWPe
3621
fψfψ
Nodal Equivalent
Body Force Vector

Galerkin Approach
Virtual
Work Potential
of Traction
ii
Ti
eA
T
eV
T
eV
T
e
e
e
dA
dV
dV
Pφ
Tφ
fφ
φεσ 0

WP of Traction
3
1
2
Tx
Ty
21l
TT tdlWP Tφ
21l
yyxxe dATTt
x
y
533211 NNNx
634221 NNNy 2211 xxx TNTNT
2211 yyy TNTNT

WP of Traction
21l
TT tdlWP Tφ
eTel yyxxe dATTt Tψ
21
21
21
21
21
214321
2
2
2
2
6
yy
xx
yy
xx
e
TT
TT
TT
TT
lt
Nodal Equivalent
Traction Vector
Galerkin Approach
Virtual
Work Potential
of Point Loads
ii
Ti
eA
T
eV
T
eV
T
e
e
e
dA
dV
dV
Pφ
Tφ
fφ
φεσ 0

WP of Concentrated Loads
P
yiyixixiiTiP PPWP
i Pφ
Indicates that at location of point loads
a node must be defined
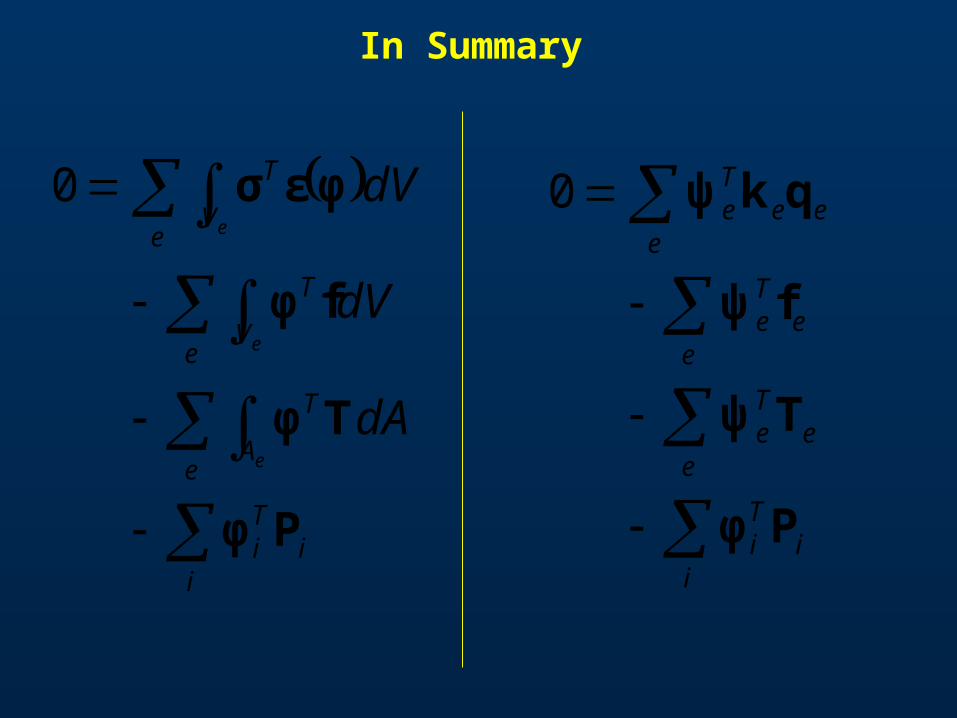
In Summary
ii
Ti
ee
Te
ee
Te
eee
Te
Pφ
Tψ
fψ
qkψ 0
ii
Ti
eA
T
eV
T
eV
T
e
e
e
dA
dV
dV
Pφ
Tφ
fφ
φεσ 0

After Superposition
PTfF
FΨKQΨ
e
ee
TT
where
0
FKQ 0
is arbitrary and thus
ii
Ti
ee
Te
ee
Te
eee
Te
Pφ
Tψ
fψ
qkψ 0

Stress Calculations
FKQ 0 FKQ 1
122131132332
211332
123123
000
000
2
1
yxyxyx
xxx
yyy
AeB
e= Be qe
12
3q6
q5
q4
q3
q2
q1
vu
For Each Element
BC

Stress Calculations
eee εDσ
eeee qBDσ
12
3q6
q5
q4
q3
q2
q1
vu
xy
y
x
xy
y
xE
2
100
01
01
1 2
e= Be qe
Constant

Summary of Procedure
Tt (force/length)
Nodes should be placed at
Discretize domain in CST
- start & end of distributed loads
- point loads

Summary of Procedure
For Every Element Compute
•Strain-Displacement Matrix B
122131132332
211332
123123
000
000
2
1
yxyxyx
xxx
yyy
Aelem
B
1 2
3q6
q5
q4
q3
q2
q1
vu

Summary of Procedure
A
Te dAtDBBk
•Element Stiffness Matrix
•Node Equivalent Body Force Vector
y
x
y
x
eee
f
f
f
f
At
3f

Summary of Procedure
21
21
21
21
2121
2
2
2
2
6
yy
xx
yy
xx
ee
TT
TT
TT
TT
ltT
•Node Equivalent Traction Vector
For ALL loaded sides

Summary of Procedure
Collect ALL Point Loads in Nodal Load Vector
yN
xN
y
x
y
x
P
P
P
P
P
P
2
2
1
1
P
1
N
Px1
Py1
PxN
PyN

Summary of Procedure
Form Stiffness Equations
e
ekK
PTfF e
ee
nT qqq 21Q
nT FFF 21F
KQF

Summary of Procedure
eeee qBDσ
KQF Apply Boundary Conditions
Solve FKQ 1
For Every Element Compute Stress

Example
(0,0) (3,0)
(3,2)(0,2)Tt=200 lb/in
fx=0
fy=60 lb/in2

ANSYS Solution – Coarse Mesh








2-D Constant Stress Triangle
• First Element for Stress Analysis
• Does not work very well
• When in Bending under-predicts displacements– Slow convergence for fine mesh
• For in plane strain conditions – Mesh “Locks”– No Deformations
Comments
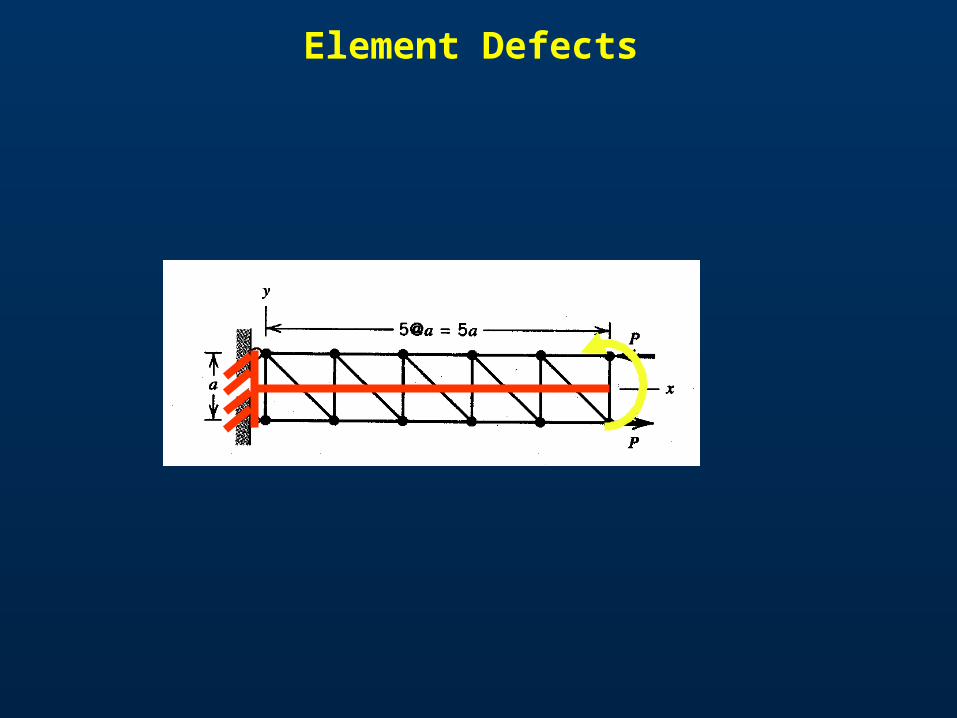
Element Defects

Element Defects
Constant Stress Triangles
Exact
Y-Deflection &X-Stress about
¼ of actual

Element Defects
0
0
0
0
011
011
1000
10
0001
01
2
2
v
u
aaaa
aa
aa
xy
y
x
x1=0, y1=0 x2=a, y2=0 x3=0, y3=a
a
ux
2
0y
a
uxy
2 ?Spurious Shear Strain Absorbs Energy – Larger Force Required

Element Defects
Mesh Lock
Rubber Like Material ~0.5
Recommended

















