D.4.2 – Design Brief: Specifications of a generic wind turbine
INNOSEA (INS)
Lead authors: Romain Quancard (INS), Clémentine Girandier (INS), Hélène Robic (INS)
Contributors: Sébastien Gueydon (MARIN)
FLOTANT -Innovative, low cost, low
weight and safe floating wind
technology optimized for deep water
wind sites, has received funding from
the European Union´s Horizon 2020
research and innovation programme
under grant agreement No.815289
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
2
The FLOTANT Project owns the copyright of this document (in accordance with the terms described
in the Consortium Agreement), which is supplied confidentially and must not be used for any
purpose other than that for which it is supplied. It must not be reproduced either wholly or partially,
copied or transmitted to any person without the authorization of PLOCAN. FLOTANT is a
Cooperation Research Project funded by the European Union´s Horizon 2020 research and
innovation programme. This document reflects only the authors’ views. The Community is not
liable for any use that may be made of the information contained therein.
[Deliverable 4.2 – Design Brief: Specifications of a generic wind turbine]
Project Acronym: FLOTANT
Project Title: Innovative, low cost, low weight and safe floating wind technology optimized for deep water wind sites (FLOTANT).
Project Coordinators: Octavio Llinás& Ayoze Castro – The Oceanic Platform of the Canary Islands (PLOCAN)
Programme:H2020-LC-SC3-2018
Topic: Developing solutions to reduce the cost and increase performance of renewable technologies
Instrument: Research & Innovation Action (RIA)
Deliverable Code: 190927-FLT-WP4_D_4_2-v_2
Due date: 300919
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
3
DISSEMINATION LEVEL
PU: Public X
PP: Restricted to other programme participants (including the Commission
Services)
RE: Restricted to a group specified by the consortium (including the Commission
Services)
CO: Confidential, only for members of the consortium (including the Commission
Services)
DOCUMENT HISTORY
Edit./Rev. Date Name
Prepared 30/10/19 Romain Quancard, Clémentine Girandier
Checked 30/10/19 Hélène Robic
Approved 30/10/19 Mattias Lynch
DOCUMENT CHANGES RECORD
Edit./Rev. Date Chapters Reason for change
INNOSEA/0.1 13/06/19 Whole document Original Version
INNOSEA/0.2 25/06/19 Section 8.1
Annex A
Updated tower diameter at tower base
Correction of the RNA centre of mass
INNOSEA/0.3 25/07/19 Section 8.1
Annex A
Updated tower length and mass
Additional turbine data
INNOSEA/0.4 06/09/19 Sections 8 to 12 Issued for Consortium partners review
INNOSEA/1.0 27/09/19 Sections 11 to 14 Update following Consortium partners
review
INNOSEA/2.0 31/10/19 Section 7 2 References added in section 7
introduction
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
4
DISTRIBUTION LIST
Copy no.
Company/
Organization
(country)
Name and surname
1 PLOCAN (ES) Ayoze Castro, Alejandro Romero, Octavio Llinás
2 UNEXE (UK) Lars Johanning, Philipp Thies, Giovanni Rinaldi
3 UEDIN (UK) Henry Jeffrey, Anna García, Simon Robertson
4 AIMPLAS (ES) Ferrán Martí, Blai López
5 ITA-RTWH (DE) Thomas Koehler, Dominik Granich, Oscar Bareiro
6 MARIN (NL) Erik-Jan de Ridder, Sebastien Gueydon
7 TFI (IE) Paul McEvoy
8 ESTEYCO (ES) Lara Cerdán, Javier Nieto, José Serna
9 INNOSEA (FR) Clémentine Girandier, Mattias Lynch, Rémy Pascal,
Hélène Robic
10 INEA (SI) Igor Steiner, Aleksander Preglej, Marijan Vidmar
11 TX (UK) Sean Kelly
12 HB (UK) Ian Walters
13 FULGOR (EL) George Georgallis
14 AW (HR) Miroslav Komlenovic
15 FF (ES) Bartolomé Mas
16 COBRA (ES) Sara Muñoz, Rubén Durán, Gregorio Torres
17 BV (FR) Claire-Julie , Jonathan Boutrot, Jonathan Huet,
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
5
Acknowledgements
Funding for the FLOTANT project (Grant Agreement No. 815289) was received from the EU
Commission as part of the H2020 research and Innovation Programme.
The help and support, in preparing the proposal and executing the project, of the partner
institutions is also acknowledged: Plataforma Oceánica de Canarias (ES), The University of
Exeter (UK),The University of Edinburgh (UK), AIMPLAS-Asociación de Investigación Materiales
Plásticos y Conexas (ES), Rheinisch-Westfaelische Technische Hochschule Aachen (DE),
Stichting Maritiem Research Instituut Nederland (NL), Technology From Ideas Limited (IE),
Esteyco SA (ES), Innosea (FR), Inea Informatizacija Energetika Avtomatizacija DOO (SI),
Transmission Excellence Ltd (UK), Hydro Bond Engineering Limited (UK), FULGOR S.A.,
Hellenic Cables Industry (EL), Adria Winch DOO (HR), Future Fibres (ES), Cobra Instalaciones y
Servicios S.A (ES), Bureau Veritas Marine & Offshore Registre International de Classification de
Navires et eePlateformes Offshore (FR).
Abstract
The purpose of this document is to define the specification of the 12 MW generic wind turbine to
be used in FLOTANT project for further numerical tasks / coupled analyses. It establishes the
methodology used to assess all the relevant turbine parameters, defines the corresponding
numerical model, and includes validation to demonstrate model is reliable and realistic. In
addition, report describes the methodologies foreseen to downscale the Turbine model for model
tests and relevant parameters for selection.
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
6
TABLE OF CONTENTS
1 Introduction ............................................................................................... 10
2 Abbreviations ............................................................................................ 10
3 Reference documents ................................................................................ 11 3.1 Scientific Publications ........................................................................................ 11
4 Coordinates ............................................................................................... 11 4.1 Tower coordinate .............................................................................................. 11 4.2 Hub rotating coordinates ................................................................................... 12 4.3 Blade pitching coordinates ................................................................................. 12 4.4 Blade no pitching coordinates ............................................................................ 13
5 The DTU 10MW Reference Wind Turbine ................................................... 13
6 Software .................................................................................................... 14 6.1 FAST .................................................................................................................. 14
6.1.1 Version ............................................................................................................................... 14
6.1.2 Modules ............................................................................................................................. 14
6.2 DNVGL Bladed ................................................................................................... 15
6.2.1 Version ............................................................................................................................... 15
6.2.2 Rotor analysis capabilities ............................................................................................... 15
7 Upscaling of RNA properties ....................................................................... 16 7.1 General considerations on rotor upscaling.......................................................... 16 7.2 Blade geometry ................................................................................................. 17
7.2.1 Blade dimensions ............................................................................................................. 17
7.2.2 Aerofoil distribution .......................................................................................................... 17
7.2.3 Blade pre-curvature .......................................................................................................... 17
7.3 Blade mass and structural properties ................................................................. 18
7.3.1 Mass along the blades ...................................................................................................... 18
7.3.2 Bending stiffnesses .......................................................................................................... 18
7.3.3 Torsional stiffness ............................................................................................................ 18
7.3.4 Axial stiffness.................................................................................................................... 19
7.3.5 Mass moments of inertia .................................................................................................. 19
7.4 Hub properties .................................................................................................. 19 7.5 Nacelle and generator properties ....................................................................... 19
7.5.1 General considerations on the generator ....................................................................... 19
7.5.2 Drivetrain parameters ....................................................................................................... 20
7.5.3 Nacelle dimensions and mass properties ...................................................................... 20
8 Controller definition and tuning ................................................................. 20
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
7
8.1 Basic existing controllers .................................................................................... 20
8.1.1 Bladed’s internal controller.............................................................................................. 20
8.1.2 FAST’s internal controller ................................................................................................ 21
8.1.3 NREL baseline controller ................................................................................................. 21
8.1.4 Basic DTU controller ........................................................................................................ 21
8.2 Procedure for controller tuning .......................................................................... 21
8.2.1 Turbine operation in steady-state ................................................................................... 21
8.2.2 Basic external controller selection and tuning .............................................................. 21
8.2.3 Improvements for floating wind ....................................................................................... 21
9 Definition of the tower .............................................................................. 22 9.1 Dimensions ....................................................................................................... 22 9.2 Materials ........................................................................................................... 23
10 Modelling strategy ..................................................................................... 23
11 Model validation and first results ............................................................... 24 11.1 Steady power curve ........................................................................................... 24 11.2 Steady operational loads ................................................................................... 26 11.3 Steady parked loads .......................................................................................... 27 11.4 Wind steps ........................................................................................................ 27 11.5 Turbulent wind .................................................................................................. 28
12 Code-to-code validation ............................................................................. 29 12.1 Mass validation ................................................................................................. 29 12.2 Blade modes validation ..................................................................................... 29 12.3 Controller behavior validation ........................................................................... 30
12.3.1 Controller behavior under wind steps ............................................................................ 30
12.3.2 Controller behavior under turbulent wind ...................................................................... 31
12.4 Loads validation ................................................................................................ 33
12.4.1 Static loads ........................................................................................................................ 33
12.4.2 Loads for power production under constant wind ........................................................ 33
12.4.3 Loads for power production under turbulent wind ........................................................ 35
13 Downscaling for test tank ........................................................................... 37 13.1 Physical turbine in generated wind .................................................................... 37 13.2 Active blade pitch control .................................................................................. 40 13.3 Hybrid testing .................................................................................................... 41
14 List of holds ............................................................................................... 43
15 ANNEX 1 Description of the 12MW turbine ................................................ 43
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
8
LIST OF FIGURES
FIGURE 1 TOWER COORDINATE ................................................................................................ 12
FIGURE 2 HUB COORDINATE ..................................................................................................... 12
FIGURE 3 3D SHAPE OF THE DTU 10MW BLADE, WITHOUT PRE-BEND ..................................... 17
FIGURE 4 PRE-BEND SHAPE OF THE DTU 10MW BLADE .......................................................... 18
FIGURE 5 EVOLUTION OF THE DIAMETER AND WALL THICKNESS OF THE DTU 10MW TOWER WITH
HEIGHT ABOVE GROUND ............................................................................................................ 23
FIGURE 6 EVOLUTION OF SEVERAL PARAMETERS AGAINST WIND SPEED: ELECTRICAL POWER (IN
BLACK), ROTOR SPEED (IN RED), GENERATOR TORQUE (IN GREEN) AND PITCH ANGLE (IN BLUE)
................................................................................................................................................. 24
FIGURE 7 EVOLUTION OF THRUST FORCE AGAINST WIND SPEED ............................................... 25
FIGURE 8 EVOLUTION OF POWER COEFFICIENT (IN BLACK) AND THRUST COEFFICIENT (IN RED)
AGAINST WIND SPEED ............................................................................................................... 25
FIGURE 9 EVOLUTION OF POWER COEFFICIENT (ON THE LEFT) AND THRUST COEFFICIENT (ON THE
RIGHT) AGAINST WIND SPEED FOR THE DTU 10 MW [1] FOR SEVERAL SOFTWARES ................. 26
FIGURE 10 MX AND MY AT TOWER TOP AGAINST WIND SPEED .................................................. 26
FIGURE 11 CONTROLLER RESPONSE UNDER WIND STEPS FROM 4 TO 25 M/S ........................... 28
FIGURE 12 CONTROLLER RESPONSE UNDER TURBULENT WIND OF 12 M/S ............................... 29
FIGURE 13 COMPARISON BETWEEN FAST AND BLADED CONTROLLER RESPONSE UNDER WIND
STEPS FROM 4 TO 25 M/S ......................................................................................................... 31
FIGURE 14 COMPARISON BETWEEN FAST AND BLADED CONTROLLER RESPONSE UNDER
TURBULENT WIND OF 4 M/S ....................................................................................................... 31
FIGURE 15 COMPARISON BETWEEN FAST AND BLADED CONTROLLER RESPONSE UNDER
TURBULENT WIND OF 12 M/S ..................................................................................................... 32
FIGURE 16 COMPARISON BETWEEN FAST AND BLADED CONTROLLER RESPONSE UNDER
TURBULENT WIND OF 24 M/S ..................................................................................................... 32
FIGURE 17 TOWER TOP LOADS UNDER CONSTANT WIND ........................................................... 34
FIGURE 18 LOADS ON THE ROTATING HUB UNDER CONSTANT WIND .......................................... 34
FIGURE 19 LOADS ON BLADE ROOT 1 (NO PITCHING) UNDER STATIC WIND ............................... 35
FIGURE 20 MX AT TOWER TOP FOR A TURBULENT WIND OF 12 M/S FOR FAST MODEL (IN GREY)
AND BLADED MODEL (IN YELLOW) ............................................................................................. 36
FIGURE 21 MY AT TOWER TOP FOR A TURBULENT WIND OF 12 M/S FOR FAST MODEL (IN GREY)
AND BLADED MODEL (IN YELLOW) ............................................................................................. 36
FIGURE 22 COMPLETED TURBINE IN THE WORKSHOP (MSWT-5MW@1/50) ........................... 38
FIGURE 23 CAD DESIGN OF THE MSWT-5MW@1/50 ............................................................. 38
FIGURE 24 CT AND CP CURVE MARIN STOCK TURBINE FOR RATED PITCH MEASURED IN THE
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
9
MODEL TESTING BASIN COMPARED TO THE FULL SCALE NREL 5MW WIND TURBINE BEM RESULTS
................................................................................................................................................. 39
FIGURE 25 COMPARISON OF REFERENCE (FAST_DTUAERO) WITH REFRESCO RESULTS (FS
AND MS) FOR DIFFERENT GEOMETRIES, 07_201_3F WAS CHOSEN FOR THE MSWT-
10MW@1/60 ........................................................................................................................... 40
FIGURE 26 OVERVIEW OF PRESSURE DISTRIBUTION, LIMITING STREAMLINES AND FLOW
SEPARATION AT SUCTION SIDE OF MSWT-10MW@1/60 FOR TSR = 4.5, 7.5 AND 11.6 ......... 40
FIGURE 27 HYBRID TESTING OF FOWT WITH SIL (FAST) ....................................................... 42
FIGURE 28 EXAMPLE OF ACTUATION THANKS TO 5 CABLE-WINCHES ......................................... 42
FIGURE 29 SIL OPERATING PRINCIPLE: BLUE= PROCESSES, ORANGE= REAL-TIME BASIN DATA,
GREEN= PRE-DEFINED NUMERICAL SOFTWARE INPUT DATA ...................................................... 42
FIGURE 30 ILLUSTRATION OF HYBRID TESTING WITH CABLE-WINCH SYSTEM IN THE OB (MARIN)
................................................................................................................................................. 42
LIST OF TABLES
TABLE 1 BASIC PARAMETERS FOR THE DTU 10MW RWT ....................................................... 14
TABLE 2 MOMENTS UNDER EXTREME CONDITIONS AT TOWER TOP AND BLADE 1 ROOT PITCHING
FOR THE GENERIC 12 MW AND FOR THE DLC 6.1 OF THE DTU 10 MW .................................. 27
TABLE 3 MASS COMPARISON BETWEEN BLADED AND FAST MODELS ....................................... 29
TABLE 4 BLADE MODE FREQUENCY COMPARISON BETWEEN BLADED AND FAST MODELS ........ 30
TABLE 5 STATIC LOADS FOR BLADED AND FAST MODELS ........................................................ 33
TABLE 6 INTERFACE BETWEEN WP4 (INTEGRATED MODELLING) AND WP5 (DEMONSTRATION) 37
TABLE 7 EXAMPLE OF 3 DOF ACTUATION FOR HYBRID TESTING OF FOWT .............................. 41
TABLE 8 VERIFICATION OF SIL COMPONENT (WITH CLIENT'S INPUT DATA) ................................ 43
TABLE 9 GENERAL DESCRIPTION OF GENERIC 12MW TURBINE RNA ....................................... 44
TABLE 10 GENERAL DESCRIPTION OF GENERIC 12MW TURBINE TOWER .................................. 45
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
10
1 Introduction INNOSEA is currently taking part in the European Union-funded FLOTANT project, within a
consortium formed by 18 partners including research institutes and companies from 8 different
European countries. The objective of FLOTANT is to improve the cost, the environmental
sustainability and the social acceptance of deep-water wind farms (in the 100m-600m depth
range), in order to achieve the full competitiveness of these solutions compared to fossil power
plants and decrease the LCOE of the technology. The main target is the development of concepts
and products to reduce the initial investment and maintenance costs, while improving the
performance of these deep-water farms.
The project’s Work Package 4, led by INNOSEA, focuses on the definition of floater specifications,
the integrated modelling of the whole floating wind system and the assessment of its global
performance. For these purposes, it is necessary to define, model and validate the wind turbine
that will be considered for the whole project.
In light of the current industry level for offshore wind turbine capacity, it was decided to use a 12
MW turbine, which should correspond to the machines deployed at a commercial scale in the next
few years. A “generic” wind turbine model will be created by upscaling an existing and publicly
available model.
The present report establishes the methodology used to define all the relevant turbine
parameters, setup the corresponding numerical model, and validate it as reliable and realistic.
The development of a 12MW generic wind turbine model will be based on an existing public model
that is the most relevant starting point for this exercise: the DTU 10MW RWT, designed by the
Danish Technical University as part of the Light Rotor project. The new turbine will then be
obtained by upscaling all the parameters needed to define a numerical model aiming at
performing aeroelastic simulations.
The turbine’s validation will be done by using DNVGL’s Bladed aeroelastic software for its detailed
rotor performance analysis capabilities, and NREL’s FAST software will be used for the integrated
simulations that will be run during the next phases of the work package; its open-source nature
makes it more convenient, in particular for the possibility of coupling it with OrcaFlex.
Current 12 MW model is a preliminary onshore model to be used for further modelling in WP4.
During project course, the model will be updated, particularly the controller.
2 Abbreviations DLL Dynamic Link Library
DTU Danmarks Tekniske Universitet (Danish Technical University)
FS Full scale
GWT Generic Wind Turbine
MS Model scale
MSWT MARIN stock wind turbine
NREL National Renewable Energy Laboratory (U.S. Department of Energy)
RNA Rotor - Nacelle Assembly
RWT Reference Wind Turbine
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
11
SIL Software in the loop
TSR Tip-Speed Ratio
3 Reference documents
3.1 Scientific Publications
The following scientific publications are referred to in the present document:
[1] Description of the DTU 10 MW Reference Wind, Christian Bak et al., DTU Wind Energy, July 2013
[2] DTU10MWReferenceWindTurbine.xls, DTU Wind Energy, June 2013
[3] DTU10MWRWT_FAST_v1.00, DTU 10MW Reference Wind Turbine FAST model v1.00, LIFES50+ Deliverable 1.2 Wind Turbine Model Directory, Michael Borg, DTU Wind Energy
[4] Innovation in wind turbine design, Peter Jamieson, Garrad Hassan, 2011
[5] Basic DTU Wind Energy controller, Hansen, Morten Hartvig; Henriksen, Lard Christian, DTU Wind Energy, 2013
[6] OC3 – Benchmark Exercise of Aero-Elastic Offshore wind Turbine Codes, Patrick Passon, NREL, August 2007
[7] Development of a Scaled Down Wind Turbine for Model Testing Floating Wind Turbines. Al., de Ridder et. San Francisco : ASME 33rd International Conference on Ocean, Offshore and Arctic Engineering, 2014
[8] Sauder, T.; Chabaud, V.; Thys, M.; Bachynski E.; Saether, L.O.; 2016. “Real-Time Hybrid Model Testing of a Braceless Semi-Submersible Wind Turbine. Part I: The Hybrid Approach”. OMAE2016-54435.
[9] Gueydon, S.; Bayati, I.; de Ridder, E.J. ; 2019 (in revision). “Discussion of solutions for basin model tests of FOWTs in combined waves and wind” . Journal of Ocean Engineering.
4 Coordinates Coordinates used in this report are defined in this section.
4.1 Tower coordinate
The tower coordinate, illustrated by FIGURE 1 is defined by:
• Its origin, located at the center of the tower, at the studied elevation (for example at tower
base or tower top);
• XT, pointing in the nominal (0°) downwind direction;
• YT, pointing to the left when looking in the nominal downwind direction;
• ZT, pointing vertically upward opposite to gravity.
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
12
FIGURE 1 TOWER COORDINATE
4.2 Hub rotating coordinates
The hub rotating coordinate, illustrated by FIGURE 2 is defined by:
• Its origin, located at the intersection of blade and shaft axes;
• XN, pointing along the hub in the nominal downwind direction;
• YN, orthogonal with XN and ZN axes such as they form a right-handed coordinate
system;
• ZN perpendicular to the hub centerline with the same azimuth as Blade 1.
FIGURE 2 HUB COORDINATE
4.3 Blade pitching coordinates
The blade pitching rotating coordinate is defined by:
• Its origin, located at the intersection of blade’s pitch axis and the blade root;
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
13
• XB, orthogonal with YB and ZB axes such as they form a right-handed coordinate system;
• YB, pointing towards the trailing edge of the blade and parallel to local chord line;
• ZB pointing along the pitch axis towards the tip of the blade.
4.4 Blade no pitching coordinates
The blade no pitching rotating coordinate is defined by:
• Its origin, located at the intersection of blade’s pitch axis and the blade root;
• XB, orthogonal with YB and ZB axes such as they form a right-handed coordinate system;
• YB, pointing towards the trailing edge of the blade if the pitch and twist were zero and
parallel to local chord line;
• ZB pointing along the pitch axis towards the tip of the blade.
5 The DTU 10MW Reference Wind Turbine In order to define a realistic wind turbine without having to go through the whole design process,
it was decided to choose a reference wind turbine and upscale it to 12MW. Indeed, designing a
wind turbine is a very long process which involves skills from different specialised engineers; such
a detailed process is unnecessary in a project whose focus is not on the wind turbine itself.
The DTU 10MW RWT (Reference Wind Turbine) was developed during the Light Rotor project,
which was a cooperation between DTU and Vestas: the main objective was to optimise the design
of the blades to increase the stiffness and overall performance of the rotor taking into account
both aerodynamic, aero-servo-elastic and structural considerations.
It was decided to use that wind turbine model as a reference for several reasons:
- its complete public availability: Documentation [1], [2] and models can be downloaded on DTU website,
- the relatively small difference between its rated power and the 12MW target, - the fact that it was specifically designed for offshore conditions and by a group of
specialists, which makes it quite reliable, - it has already been used by several research and development projects, including some
focusing on floating wind.
The table below summarises some of the DTU 10MW RWT’s basic parameters, and all the details
on its design are given in [1] and [2]. The reference data used to develop the 12MW generic wind
turbine’s aeroelastic model will be taken from the resources made publicly available by DTU
regarding the RWT, including a HAWC2 model and a FAST model.
Characteristics Values for DTU 10MW RWT
Rotor, Hub diameter 178.3m, 5.6m
Drivetrain Medium speed, two-stage gearbox
Optimal tip-speed ratio 7.5
Cut-in, Rated, Cut-out wind speed 4m/s, 11.4m/s, 25m/s
Cut-in, Rated rotor speed 6RPM, 9.6RPM
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
14
Rotor mass 229tons (each blade ~41tons)
Nacelle mass 446tons
TABLE 1 BASIC PARAMETERS FOR THE DTU 10MW RWT
6 Software The different software used for turbine design are described in this section.
6.1 FAST
FAST is NREL's open source tool for simulating the coupled dynamic response of wind turbines.
FAST joins aerodynamics models, hydrodynamics models for offshore structures, control and
electrical system (servo) dynamics models, and structural (elastic) dynamics models to enable
coupled time-domain nonlinear aero-hydro-servo-elastic simulation.
6.1.1 Version
The version of the FAST model of the DTU 10MW RWT used during the LIFE+50 project1 is FAST
V8.12 [3]. Then, it was chosen to build the first version of the 12MW generic model in this same
version. In the next phases of this work, newer versions might be used: FAST V8.16, or even
OpenFAST which is the collaborative version available on GitHub for anyone to raise issues or
suggest modifications.
6.1.2 Modules
FAST is based on different modules responsible for different parts of the simulations:
▪ AeroDyn is an aerodynamics software library (module) for use by designers of horizontal-
axis wind turbines. It is designed to be interfaced with FAST for aero-elastic analysis of
wind turbine models. The aerodynamics model in AeroDyn is a detailed analysis that
includes Blade Element Momentum (BEM) theory (with modifications to improve accuracy
in yawed flow).
▪ InflowWind is a FAST module that allows to process wind-inflow, either steady wind
model internally calculated or using various types of input files (uniform, binary TurbSim
full-field, binary bladed-style FF, binary HAWC wind files).
▪ Elastodyn is a structural-dynamic model for horizontal-axis wind turbines based on
modal superposition theory. It includes structural models of the rotor, drivetrain, nacelle,
tower and platform.
▪ HydroDyn is a time-domain hydrodynamics module that has been coupled with FAST to
enable aero-hydro-servo-elastic simulation of offshore wind turbines. HydroDyn allows
for multiple approaches for calculating the hydrodynamic loads on a structure: a linear
potential-flow theory solution, a strip-theory solution, or a combination of both. Hydrodyn
requires importing the hydrodynamic database in frequency domain obtained by a
potential flow solver (e.g. NEMOH).
▪ ServoDyn is a control and electrical-drive model for wind turbines. It includes control and
electrical-drive models for blade pitch, generator torque, nacelle yaw, high-speed shaft
1 https://lifes50plus.eu
https://nwtc.nrel.gov/FASThttps://lifes50plus.eu/https://lifes50plus.eu/
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
15
brake and blade-tip brakes. ServoDyn can use an external controller defined by a DLL,
so-called “Bladed-style” because it uses the same communication scheme as DNV GL’s
Bladed.
▪ The Mooring Analysis Program (MAP++) is a library designed to model the steady-
state forces on a Multi-Segmented, Quasi-Static mooring line. This model is developed
based on an extension of conventional single-line static solutions. Conceptually, MAP++
solves the algebraic equations for all the mooring elements simultaneously with the
condition that the total force at connection points sum to zero. Seabed contact, seabed
friction, and externally applied forces can be modelled with this tool. This allows multi-
element mooring lines with arbitrary connection configurations to be analysed.
▪ The TurbSim stochastic inflow turbulence tool has been developed by NREL to enable
the numerical simulation of a full-field flow that contains coherent turbulence structures.
The purpose of TurbSim is to provide the wind turbine designer with the ability to drive
FAST simulations of advanced turbine designs with simulated inflow turbulence
environments that incorporate many of the important fluid dynamic features known to
adversely affect turbine aero-elastic response and loading. TurbSim is used in pre-
processing, before FAST simulations.
▪ BModes is a finite-element code that provides dynamically coupled modes for a beam.
The beam can be a rotor blade, rotating or non-rotating, or a tower. Both the blades and
tower can have a tip attachment. The tip attachment is assumed to be a rigid body with
mass, six moments of inertia, and a mass centroid that may be offset from the blade or
tower axis. In addition to the tip inertia, the tower can also have tension-wire supports.
Both the tip inertias and tension-wire support can substantially influence the coupled
modes mentioned earlier, especially for a tower. BModes is used in pre-processing,
before FAST simulations.
6.2 DNVGL Bladed
Bladed is one of the industry’s standard integrated software package for the design and
certification of onshore and offshore horizontal-axis wind turbines. It provides users with a design
tool that has been extensively validated against measured data from a wide range of turbines and
enables them to conduct the full range of performance and loading calculations. It was first
created by Garrad Hassan and is now developed and maintained by DNV GL.
Unlike FAST, Bladed is not composed of different independent modules: it is one stand-alone
software with a user-friendly interface but based on a commercial license.
6.2.1 Version
During this work, we will use Bladed V4.6. Although it is not the latest version, it constitutes a
good compromise: relatively new with modelling capabilities that are largely sufficient, not too
demanding in terms of IT resources, and a version with which INNOSEA has a large experience
and an extensive set of in-house tools.
Bladed V4.6 has modelling options that are at least as good as the ones offered by FAST and
described above and offers additional options that are especially convenient when trying to
validate rotor designs.
6.2.2 Rotor analysis capabilities
Bladed benefits from advanced capabilities for the analysis of rotor performance and loads,
including:
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
16
▪ The “performance coefficients” calculation, including the evolution of the power coefficient
as a function of tip-speed ratio (TSR) and blade pitch angle. This option is useful to check
if the rotor behaves as expected from an aerodynamic point of view, and to design the
controller with the appropriate parameters.
▪ The steady power curve, which gives the evolution of different variables against wind
speed: output power but also rotor and generator speed, aerodynamic and electrical
torque or rotor thrust. These is helpful when checking the behaviour of the controller in
different power-production conditions.
▪ The steady operational loads calculation, which gives any loads or deflections of the
structure in steady conditions corresponding to a range of operational wind speeds.
▪ The steady parked loads calculation, which is the non-operating counterpart of the latter,
and provides constant loads corresponding to idling or parked conditions.
Bladed’s modal analysis capabilities is also useful, as it is easy in use and can calculate up to 50
modes for each blade and up to 50 modes for the tower (including the foundation or the floater).
7 Upscaling of RNA properties The following methodology defines and justifies the laws that are applied for scaling the reference
wind turbine to a new generic 12MW model. This methodology comes from the recommendations
given in [4] and the method used to design the DTU 10 MW described in [1].
Final definition of the 12MW generic turbine RNA’s is given in Annexe A.
7.1 General considerations on rotor upscaling
As stated above, the objective of this work is to define a new model of wind turbine without going
through the whole design process, but by using a reliable reference turbine and applying
appropriate scaling laws. This is especially important when considering the blades, which are both
an essential part of the machine and the result of a long and complicated design process.
When upscaling the rotor, one must preserve the flow geometry in the range of operating
conditions so that it remains consistent with the blade geometry that was chosen. This is done by
keeping a constant design tip-speed ratio, represented by 𝜆 and given by:
𝜆 = 𝜔. 𝑅 𝑉⁄
where 𝑅 is the rotor radius, 𝑉 is the incoming wind speed and 𝜔 is the corresponding rotor angular
rotation speed. Thus, the product 𝜔. 𝑅 represents what we call the tip-speed.
As a result for a fixed wind speed value, if 𝑅 scales by a scaling factor 𝑆𝑓, 𝜔 has to scale by 1
𝑆𝑓⁄
in order to keep 𝜆 constant.
Given that the available power at the rotor depends on the swept area, it scales as the square of
the rotor’s diameter. The objective being to go from 10 to 12MW, the spanwise blade dimensions
are scaled up by:
𝑆𝑓 = √12
10⁄
If all blade dimensions are scaled by 𝑆𝑓 and the rotor speed is scaled inversely, then for a given
wind speed any section of the new blade (located by span-wise fraction of blade length) will see
the same flow as the corresponding section on the reference blade and thus be subjected to
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
17
efforts scaled by 𝑆𝑓2. This is due to unchanged local air pressure (because of identical flow
velocity), acting on blade surfaces scaled themselves by 𝑆𝑓2. Taking into account the moment
arm scaled by 𝑆𝑓, the aerodynamic torque Γ is then scaled by 𝑆𝑓3. Ultimately, the mechanical
power 𝑃 picked up by the rotor is what we expect:
𝑃 = Γ × 𝜔 = (𝑆𝑓3 × Γ0) × (
1𝑆𝑓
⁄ × 𝜔0) = 𝑆𝑓2 × 𝑃0 =
1210⁄ × 10 = 12 𝑀𝑊
where the subscript “0” indicates the reference turbine’s values.
7.2 Blade geometry
7.2.1 Blade dimensions
The blades of the reference turbine were optimised for a certain flow geometry which, as
explained previously, will be preserved. As a consequence, we keep the geometry of the blades
(see FIGURE 3), and upscale all the dimensions.
FIGURE 3 3D SHAPE OF THE DTU 10MW BLADE, WITHOUT PRE-BEND
The chords and thicknesses of the sections along the blade are scaled up by 𝑆𝑓 as well as the
spanwise dimensions.
7.2.2 Aerofoil distribution
The distribution of aerofoils along the blades remains the same as in the reference model, along
with the associated aerodynamic data.
Likewise, the aerodynamic twist (orientation of the aerofoil sections around the blade axis) applied
to the DTU 10MW’s blades is kept identical in order to preserve the geometry of interactions with
the flow along the blade.
7.2.3 Blade pre-curvature
With the powerful winds encountered offshore, the blades tend to bend in the flap-wise direction
to the extent where their tip might collide with the tower. To avoid that, they are usually designed
with a certain pre-bend in the upwind direction. The blades of the reference turbine were designed
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
18
with a pre-curvature calculated to compensate the maximum deflection caused by wind loads
(FIGURE 4); the curvature along the new turbine’s blades is therefore upscaled by 𝑆𝑓 as well.
FIGURE 4 PRE-BEND SHAPE OF THE DTU 10MW BLADE
7.3 Blade mass and structural properties
Still following the idea of having blades that keep the same properties with upscaled dimensions,
we upscaled the mass and structural properties as if we had the same materials and internal
structure, and as if the upscaled dimensions brought a similar reaction to the upscaled loads
applied on the blades. The results might not correspond to the actual properties of the composite
materials used for real blades, but as noted before this is of no importance regarding the
objectives of this work package.
7.3.1 Mass along the blades
Considering the same material densities with cross-sectional dimensions that are upscaled by
𝑆𝑓 × 𝑆𝑓, the masses per unit length along the blade are naturally scaled by 𝑆𝑓2. As a result, the
masses after span-wise integration are scaled by 𝑆𝑓3.
7.3.2 Bending stiffnesses
The flap-wise and edge-wise bending stiffnesses along the blade are scaled in order to sustain
the upscaled aerodynamic loads and allow for analogous deformations. To be more precise, we
need a blade that take the same overall shape when subjected to the aerodynamic moments
upscaled by 𝑆𝑓3. A longer blade (scaled by 𝑆𝑓) will take the same shape if the sections along it
undergo lower curvatures (angular deformations per unit length), scaled by 1 𝑆𝑓⁄ . This means that
bending stiffnesses need to respond with equally upscaled moments (𝑆𝑓3) to smaller curvature
deformations (𝑆𝑓−1), and consequently need to be scaled by
𝑆𝑓3
𝑆𝑓−1⁄ = 𝑆𝑓
4.
This is also consistent with the fact that the bending stiffness is calculated as the product of the
area moment of inertia (logically scaled by 𝑆𝑓4) and Young’s modulus (which remains the same if
we consider the same materials).
7.3.3 Torsional stiffness
The reasons given above for flap-wise and edge-wise deformations can also be applied to angular
deformations around the blade axis. Therefore, torsional stiffnesses along the blade are scaled
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
19
by 𝑆𝑓4 as well.
The blade torsional stiffness is not available in Elastodyn, the FAST structural-dynamic module.
Then, the blade torsional stiffness is not considered in our model.
7.3.4 Axial stiffness
Unlike bending and torsional stiffnesses which respond mostly to aerodynamic loading, the axial
stiffness along the blade will need to sustain the axial forces due to centrifugal forces in the rotor.
The magnitude of such forces is given by:
𝐹𝑐 = m × 𝜔2 × r = (𝑆𝑓
3 × m0) × (1
𝑆𝑓⁄ × 𝜔0)
2
× (𝑆𝑓 × r0) = 𝑆𝑓2 × F𝑐,0
where 𝐹𝑐 is the centrifugal force, m is the mass subject to this force, 𝜔 is the rotor’s angular speed
and r is the radial position considered on the rotor. The subscript “0” indicates the reference
turbine’s values. Therefore, in order to respond adequately to axial strain, blade axial stiffnesses
are scaled by 𝑆𝑓2.
The blade axial stiffness is not available in Elastodyn, the FAST structural-dynamic module. Then,
the blade axial stiffness is not considered in our model.
7.3.5 Mass moments of inertia
To be consistent with the scaling of mass (𝑆𝑓3) and dimensions (𝑆𝑓), mass moments of inertia
must be scaled by 𝑆𝑓5. The blade sections’ inertias per unit length are therefore scaled by 𝑆𝑓
4.
7.4 Hub properties
The hub’s geometry and mass properties being of little importance in the aeroelastic models, they
are scaled according to simple rules:
▪ The dimensions and centre of gravity position by 𝑆𝑓
▪ The mass by 𝑆𝑓3
▪ The inertia by 𝑆𝑓5
7.5 Nacelle and generator properties
7.5.1 General considerations on the generator
When taking a look at the transmission used for the design of large offshore wind turbines, we
can observe that most use direct-drive technologies, and some use medium-speed gearboxes.
As the DTU 10MW RWT uses the latter with a gearbox ratio of 1:50, we are faced with the
following question: is this representative of the generation of turbines to come? And more
importantly in the context of this project: will the chosen transmission technology have a significant
impact on the global simulations for which we will use the wind turbine model?
Among the parameters that will be affected by this choice, the inertia of the rotor on the generator
side will be much higher in the case of a direct-drive, but this will have little effect on the global
loads and dynamics of the system (the blades’ contribution to rotor inertia are higher by two orders
of magnitude). Also, the chosen technology will have an impact on controller design, but that task
will be carried out later and adapted accordingly; these seem to be the only topics for which we
could be interested in what happens inside the nacelle in terms of transmission.
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
20
The comparison of nacelle masses for recent large industrial turbines that use direct-drive or a
gearbox shows that the value is slightly higher in gearbox case, by approximately 10%. This
difference will have an effect on the loads in the structure and the dynamics of the system, along
with the inertias that will naturally differ as well.
Although we cannot affirm that the market for large offshore wind turbines will evolve one way or
the other, we have more data at our disposal concerning industrial models with the direct-drive
technology; we choose therefore that alternative in order to be more confident with the RNA mass
obtained.
7.5.2 Drivetrain parameters
As stated above, a direct-drive generator’s shaft has much higher inertia than a high-speed shaft
driven through a gearbox. Several values were extracted from industrial direct-drive turbines and
upscaled by 𝑆𝑓5, and a realistic value was deduced for our 12MW generic turbine.
The shaft’s torsional spring and damper values should be upscaled according to the complete
drivetrain’s inertia increase, in order to keep the same global torsional natural frequency and
damping ratio as the reference turbine. However, the complete drivetrain’s inertia of the reference
turbine includes the gearbox inertia, so the choice to use a direct-drive technology does not allow
us to use this method. It was then chosen to not consider the shaft torsional flexibility in the model.
This might be added in the next phases of this work.
7.5.3 Nacelle dimensions and mass properties
Although nacelle dimensions can be provided to Bladed for the calculation of aerodynamic loads,
they are not used in FAST; we will therefore ignore those dimensions and the related effects.
As previously indicated, the nacelle mass is upscaled by 𝑆𝑓3, and then divided by 1.1. The mass
moment of inertia about the yaw axis is upscaled by 𝑆𝑓5 and divided by 1.1, considering that
masses are reduced but their repartition remains unchanged. As for the rolling and nodding
inertias required by Bladed, they are scaled from known industrial direct-drive turbine models.
8 Controller definition and tuning Once the generic wind turbine’s RNA model is defined, the controller can be defined, tuned to
have a satisfactory response with the specificities of the rotor, and validated thanks to Bladed’s
steady state results and some simple dynamic simulations. These first steps will be performed
with the onshore Bladed model of the turbine, with a rigid link to the onshore tower described in
section 9. Controller improvements for a floating version will be evaluated later.
8.1 Basic existing controllers
Controller design is an expertise that is developed and kept by wind turbine manufacturers, and
only a few basic controllers are publicly available as source code. Aeroelastic software also
include internal controller routines that are more or less elaborate.
8.1.1 Bladed’s internal controller
Bladed integrates control functions for different types of turbines, including for variable-speed
pitch-controlled turbines. These are good bases to validate rotor performance and calculate basic
results, but they lack flexibility. Bladed also gives the possibility to provide a DLL controller file
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
21
with which it will communicate, and which is used to emulate a real wind turbine controller’s
operation.
8.1.2 FAST’s internal controller
FAST only contains very basic control functions, insufficient for dynamic simulations. As a suite
of open-source software, it offers the possibility of developing user-defined routines that can be
integrated in the code. It also allows the use of “Bladed-style” DLL controllers.
8.1.3 NREL baseline controller
The NREL has developed, for its 5MW turbine, a simple controller with a source code that is
publicly available, and which provides a good basis to ensure the adequate operation of variable-
speed pitch-controlled turbines. This code can be adapted to add special features for floating
wind, and compiled into a DLL file that can be provided to Bladed and FAST alike.
8.1.4 Basic DTU controller
DTU has also developed a basic controller which is a little more complex than the NREL’s version,
and can also be compiled into a DLL. It was designed for pitch-regulated variable-speed wind
turbines and features both partial and full load operation capabilities as well as switching
mechanisms ensuring smooth transition between the two modes of operation. The controller also
includes drivetrain and tower dampers, a rotor speed exclusion zone, and filters on the feedback
signal [4].
8.2 Procedure for controller tuning
8.2.1 Turbine operation in steady-state
Bladed’s internal control functions will be used to handle the first step of controller design:
choosing and validating basic control parameters such as the constant that defines the torque-
speed curve followed in partial load operation, or the minimum blade pitch. These choices will
lead us to establishing the steady power curve and steady operational loads.
8.2.2 Basic external controller selection and tuning
The NREL baseline controller was chosen to be tested first because of its simplicity and
INNOSEA’s experience using and adapting it: it was tuned, and basic Dynamic simulations were
run on Bladed to validate its performance. This baseline controller was then validated thanks to
its response to wind speed steps over the range of power-production wind speeds.
Then, the same simulations were run on FAST with this tuned controller to ensure the turbine
performance and response are the same for both models.
A next step might be the study, tuning and testing of a different controller (e.g. DTU’s basic
controller) on the FAST model. The possible advantages of its more elaborate control strategies
might be evaluated with similar dynamic simulations on FAST, and in specific situations that might
highlight the benefits of these additional features; for instance, the handling of a structural mode
resonance may be tested. This point is part of the list of holds in section 14.
8.2.3 Improvements for floating wind
Floating wind poses additional challenges to turbine control, which are not addressed in the basic
controllers mentioned above. The best way of achieving optimal turbine performance is to use
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
22
altogether different control algorithms, but we can still obtain a satisfying behaviour by making
minor changes in strategy or tuning to a basic fixed-turbine controller.
These floating-specific improvements will be evaluated at a later phase, when the turbine model
is validated, and a first design of the whole system is completely available (with a tower, floating
platform and moorings).
In particular, solutions will be investigated for the negative damping issue induced by blade pitch
activity on platform pitch motion. For instance, a feedback loop could be added with the tower-top
acceleration acting on the pitch controller, or the gains of the latter could be detuned in order to
pull its frequency bandwidth away from the platform’s pitch natural frequency.
These improvements are part of the list of holds in section 14.
9 Definition of the tower As a first approach, the tower is kept rigid for the preliminary load assessment loop. It will be
improved in the next steps of this project. This point is part of the list of holds in section 14.
Final definition of the 12MW generic turbine tower’s is given in Annex A.
9.1 Dimensions
The outer diameter of the DTU 10MW tower varies linearly from D = 8.3m at the bottom (h = 0m)
to D = 5.5m at the top (h = 115.63m). The tower was divided into 10 sections, where the wall
thickness is constant (see FIGURE 5).
First, the tower length was upscaled to account for the upscaling of the rotor diameter, while
keeping the same distance between blade tip and tower base (29.85m). This first calculated
length of 124.5m is only a preliminary value for the onshore model of the turbine, without any
requirements. Then, taking into account the rotor radius, the minimum safe clearance2 of 22m,
the vertical distance between tower top and the hub axis and the platform heights above MSL3 of
15m, the final tower length can be calculated.
The tower base diameter is already rather high (8.3m) and review of available data of current
large turbines shows that there is no need to increase the tower base diameter to larger value for
12MW. However, to ease the design of the concrete connection, it was chosen to increase it4 to
9m. The tower top diameter is also slightly increase to 6m. A linear variation between these two
values is considered between tower top and tower base.
As shown in FIGURE 5, the tower thickness varies from 38mm at the bottom to 20mm at the top.
From INNOSEA’s experience, this distribution of thickness is not realistic. Indeed, a large
thickness is needed at the bottom of the tower to allow for the door opening. However, a large
thickness is also needed at the top for the yaw crown. In between, the wall thickness can be
smaller. The difference of thickness between two cans cannot be larger than 5mm in order to
reduced Stress Concentration Factors. Respecting these rules, a new tower thickness profile was
defined.
2 Value discussed and decided on the Bi-monthly meeting WP4 on the 13th of June 2019 from Kincardine projet
3 Proposition made by ESTEYCO in the email General geometry from the 3rd of July 2019
4 Value discussed and decided on the Bi-monthly meeting WP4 on the 13th of June 2019
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
23
FIGURE 5 EVOLUTION OF THE DIAMETER AND WALL THICKNESS OF THE DTU 10MW TOWER WITH HEIGHT
ABOVE GROUND
9.2 Materials
The tower is made from steel S355 as defined by international standards. For the calculation of
the cross-section mass properties, the mass density is increased by approximately 8% in order
to account for the mass of secondary structures as per DTU 10 MW turbine. The density is equal
to 8500kg/m3.
10 Modelling strategy Because FAST is open-source, allow to launch easily a large number of simulations and let the
possibility of coupling it with OrcaFlex, FAST will be used for the load assessment loops. The
initial goal being to validate the rotor, it was chosen to build first an onshore Bladed model based
on the description of the DTU 10MW RWT provided in the Excel file [2] and in the report [1],
modified by using the scaling laws described in section 7. From this first Bladed model and from
a reference model of the DTU 10MW RWT available as a collection of FAST input files [3], a
FAST model was then created.
Because the turbine description, and especially the blade definition, are not the same between
Bladed and FAST, the Bladed model was then updated to approach as much as possible the
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
24
FAST description. Indeed, it was necessary to ensure the static behaviors were similar, to
consider the outputs furnished by Bladed and not by FAST, such as RNA center of mass and
inertias, would be valid for both models.
The section 11 shows the first results of the Bladed model and validates it. Then, the section 12
details the comparisons between both Bladed and FAST models.
11 Model validation and first results
11.1 Steady power curve
The steady power curve gives the evolution of different variables against wind speed from 4 to 25
m/s, which are the cut-in and cut-out wind speeds of the turbine. FIGURE 6 shows the evolution
of the electrical power (in black), of the rotor speed (in red), of the generator torque (in green) and
of the pitch angle (in blue). The parameters evolution can be divided in two parts. In the first one,
from the cut-in-wind speed of 4 m/s to the rated wind speed of 11.4 m/s, the rotor speed increases
with the wind speed, and the controller makes the generator torque increasing to maximize the
electrical power. Then, from the rated wind speed, the controller maintains the electrical power at
its nominal value by keeping the generator torque and the rotor speed at their nominal values. To
avoid an increase of the aerodynamic torque with the wind speed, the controller increases the
pitch angle with the wind speed.
FIGURE 6 EVOLUTION OF SEVERAL PARAMETERS AGAINST WIND SPEED: ELECTRICAL POWER (IN BLACK),
ROTOR SPEED (IN RED), GENERATOR TORQUE (IN GREEN) AND PITCH ANGLE (IN BLUE)
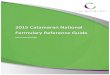
FIGURE 7 represents the thrust force acting on the rotor depending on the wind speed. As
expected, a peak appears at the nominal wind speed, validating the pitch behavior after rated
wind speed. This maximum value is higher than the value of 1800 kN obtained by upscaling the
DTU 10MW thrust force. It might be decreased by beginning to pitch the blades before the rated
rotor speed in the external controller.
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
25
FIGURE 7 EVOLUTION OF THRUST FORCE AGAINST WIND SPEED
FIGURE 8 shows the power and the thrust coefficients depending on the wind speed for our
generic 12MW, whereas FIGURE 9 presents both coefficients for the DTU 10MW [1]. In this last
figure, the green line corresponds to simulation computed with HAWCStab2, which is an aero-
servo-elastic stability tool for wind turbines developed by DTU Wind Energy. The shapes and
values are comparable for our model and the DTU 10MW, except for wind speed below 7 m/s,
because the minimum rotor speed was decreased for our model to match the rotor speed range
of industrial turbines. The power and thrust coefficients are also comparable to the ones of
industrial turbines’ INNOSEA has experience with.
FIGURE 8 EVOLUTION OF POWER COEFFICIENT (IN BLACK) AND THRUST COEFFICIENT (IN RED) AGAINST WIND
SPEED
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
26
FIGURE 9 EVOLUTION OF POWER COEFFICIENT (ON THE LEFT) AND THRUST COEFFICIENT (ON THE RIGHT)
AGAINST WIND SPEED FOR THE DTU 10 MW [1] FOR SEVERAL SOFTWARES
11.2 Steady operational loads
Steady operational loads give trends of the loads for several wind speed when the turbine is
producing, which allow to validate the level of loads of the turbine under production. FIGURE 10
shows the moments Mx and My. In the report [1] describing the DTU 10MW, maximum loads are
given for ultimate load cases. The DLC 1.1, which is a power production case with the normal
turbulent model, gives a tower top My maximum moment of around 60 000 kNm and a tower top
Mx maximum moment of around 21 000 kNm. These values are much higher, but they are not
directly comparable with our values, because they are the results of simulations with turbulent
winds whereas our results are steady loads, but it gives a first comparison of the orders of
magnitude which seems consistent.
FIGURE 10 MX AND MY AT TOWER TOP AGAINST WIND SPEED
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
27
11.3 Steady parked loads
Steady parked loads with an extreme wind speed of 51.5 m/s were also simulated. TABLE 2
presents the moments Mx and My at tower top and at blade 1 root pitching for our model, and for
the DLC 6.1 of the DTU 10MW from [1]. The DLC 6.1 is a parked case with the extreme wind
speed model with a 50 years recurrence period wind speed. These values are not directly
comparable with our values, because they are the results of simulations with turbulent winds and
whereas our results are steady loads. The wind speed is also different. However, it gives a first
comparison of the orders of magnitude which seems consistent.
Example Generic 12 MW DTU 10 MW
Mx My Mx My
[kNm] [kNm] [kNm] [kNm]
Tower top 13459 -3664 -9000 -25000
Blade root pitching -2783 2869 -18000 59000
TABLE 2 MOMENTS UNDER EXTREME CONDITIONS AT TOWER TOP AND BLADE 1 ROOT PITCHING FOR THE
GENERIC 12 MW AND FOR THE DLC 6.1 OF THE DTU 10 MW
11.4 Wind steps
In order verify the tuned controller performance, 1 m/s wind steps from 4 to 25 m/s were applied
to the model. FIGURE 11 presents the wind speed (in orange), the rotor speed (in yellow), the
blade pitch (in green), the generator torque (in dark red) and the electrical power (in brown). As
expected, the generator torque is increasing with the wind speed up to the nominal wind speed,
and then is kept at its nominal value. The blade begins to pitch at the nominal wind speed and
then we can see it stabilizes quickly at each wind step. Then, it can be concluded the controller
performs very well under constant winds.
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
28
FIGURE 11 CONTROLLER RESPONSE UNDER WIND STEPS FROM 4 TO 25 M/S
11.5 Turbulent wind
Turbulent wind was then applied to verify the dynamic behavior of the tuned controller. FIGURE
12 shows the wind speed (in orange), the rotor speed (in yellow), the blade pitch (in green), the
generator torque (in dark red) and the electrical power (in brown) for a turbulent wind of 12 m/s.
We can see a good response of the controller: when the wind is around or above the nominal
wind speed of 11.4 m/s, the electrical power is around 12 MW and the pitch follows the wind
speed evolution. However, when the wind speed decreases below the nominal wind speed, the
pitch is deactivated and the generator torque and the electrical power decrease. Similar figures
comparing the results for Bladed and FAST for wind turbulent of 4 and 24 m/s are also available
in section 12.3.2. Eventually, it can be concluded the controller performs well also under turbulent
winds from cut-in to cut-out wind speeds.
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
29
FIGURE 12 CONTROLLER RESPONSE UNDER TURBULENT WIND OF 12 M/S
12 Code-to-code validation The aim of this part is to compare both Bladed and FAST models and to validate the FAST model.
12.1 Mass validation
TABLE 3 details the masses of both models and the relative differences between them. There is
a very good agreement between the RNA masses, and only very few discrepancies between the
tower masses.
Part mass [tons] Bladed FAST Relative difference
Blade 54.846 54.845 0.00%
Rotor 303.249 303.246 0.00%
RNA 836.249 836.246 0.00%
Tower 781.679 781.593 -0.01%
Total 1617.927 1617.840 -0.01%
TABLE 3 MASS COMPARISON BETWEEN BLADED AND FAST MODELS
12.2 Blade modes validation
TABLE 4 shows the blade frequencies for both models. As FAST only allows to use up to three
blade modes, only the three first blade modes are compared. We can see that FAST model is
stiffer in terms of flap-wise modes, whereas it is softer for the edge-wise one. The differences can
be explained by the differences of blade structural definition between Bladed and FAST. Indeed,
several parameters are needed as inputs in Bladed and not in FAST, such as the position of the
center of mass and the radii of gyration at each blade station. Moreover, several studies such as
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
30
[6] have shown the differences in the mode calculation between FAST and Bladed.
Blade mode frequency [Hz] Bladed FAST Relative difference
First flap-wise mode 0.566 0.599 5.89%
First edge-wise mode 0.877 0.842 -4.01%
Second flap-wise mode 1.634 1.660 1.61%
TABLE 4 BLADE MODE FREQUENCY COMPARISON BETWEEN BLADED AND FAST MODELS
12.3 Controller behavior validation
To validate the behavior of the controller on Bladed and FAST models, the same wind steps and
turbulent winds were applied on both models. The wind speed, the rotor speed, the blade pitch,
the generator torque and the electrical power are compared in the following figures. FAST results
are represented by solid lines and Bladed results by dotted lines.
12.3.1 Controller behavior under wind steps
FIGURE 13 shows the turbine response to 1 m/s wind steps from 4 to 25 m/s for both models.
There is a good agreement between both models for all the represented variables, so it can be
concluded that the controller performs very well for both models under constant winds.
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
31
FIGURE 13 COMPARISON BETWEEN FAST AND BLADED CONTROLLER RESPONSE UNDER WIND STEPS FROM 4 TO
25 M/S
12.3.2 Controller behavior under turbulent wind
FIGURE 14, FIGURE 15 and FIGURE 16 show the turbine responses under turbulent winds of 4, 12
and 24 m/s, respectively. We can see a good agreement between both models.
For 4 m/s, there some small discrepancies for the rotor speed, which gives also differences in the
generator torque and the electrical power. It might come from differences in the rotor and
especially blades definition.
For 12 m/s, there are some differences on the blade pitch, especially when the pitch controller is
activated or deactivated. It might come from the use of different time step of communication
between the controller and the software. The impact of the communication time step with the
controller might be studied in more details in the future if needed.
From these comparisons, it can be concluded that the controller has similar behaviors for both
models under turbulent winds from cut-in to cut-out wind speeds.
FIGURE 14 COMPARISON BETWEEN FAST AND BLADED CONTROLLER RESPONSE UNDER TURBULENT WIND OF 4
M/S
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
32
FIGURE 15 COMPARISON BETWEEN FAST AND BLADED CONTROLLER RESPONSE UNDER TURBULENT WIND OF
12 M/S
FIGURE 16 COMPARISON BETWEEN FAST AND BLADED CONTROLLER RESPONSE UNDER TURBULENT WIND OF
24 M/S
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
33
12.4 Loads validation
First, a validation of the static loads of both models was made. Then, validations under constant
wind and turbulent wind were performed.
12.4.1 Static loads
Static loads are presented for both models in TABLE 5. They are presented at tower base, at tower
top, at the shaft in the hub rotating coordinate and at the blade root in the blade no pitching
coordinate for the three blades. There is a good agreement between both models.
Mx My Mz Fx Fy Fz
[kNm] [kNm] [kNm] [kN] [kN] [kN]
Tower base
Bladed 0 -9865 0 0 0 -15872
FAST 0 -9858 0 0 0 -15870
Difference - -0.07% - - - -0.01%
Tower top
Bladed 0 -9865 0 0 0 -8204
FAST 0 -9858 0 0 0 -8201
Difference - -0.07% - - - -0.03%
Rotating hub
Bladed 0 -2206 0 259 0 -2964
FAST 0 -2202 0 259 0 -2963
Difference - -0.18% - -0.03% - -0.02%
Blade 1 Root
(No pitching)
Bladed 9 675 0 23 0 -538
FAST 0 676 0 23 0 -537
Difference - 0.16% - -0.04% - -0.04%
Blade 2 Root
(No pitching)
Bladed 13252 1668 -6 59 -464 266
FAST 13260 1666 -10 59 -464 266
Difference 0.06% -0.10% - -0.03% -0.04% -0.04%
Blade 3 Root
(No pitching)
Bladed -13262 1672 1 59 464 266
FAST -13260 1673 -1 59 464 266
Difference -0.02% 0.05% - -0.03% -0.04% -0.04%
TABLE 5 STATIC LOADS FOR BLADED AND FAST MODELS
12.4.2 Loads for power production under constant wind
Constant winds were then applied to both models. FIGURE 17, FIGURE 18 and FIGURE 19 present
the loads at the tower top, at the shaft in the hub rotating coordinate and at the blade root in the
blade no pitching coordinate for the blade 1, respectively. The evolutions of the loads are similar
between both software at each studied location. Some discrepancies are visible, which may be
explained by the fact that the aero-elastic theories are different between FAST and Bladed. These
differences have been studied for example in [6]. This validates the behavior of the FAST model
under constant wind.
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
34
FIGURE 17 TOWER TOP LOADS UNDER CONSTANT WIND
FIGURE 18 LOADS ON THE ROTATING HUB UNDER CONSTANT WIND
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
35
FIGURE 19 LOADS ON BLADE ROOT 1 (NO PITCHING) UNDER STATIC WIND
12.4.3 Loads for power production under turbulent wind
The last comparison which was done between Bladed and FAST was to apply to both models the
same turbulent wind of 12 m/s. FIGURE 20 and FIGURE 21 shows time series of respectively Mx
and My at tower top. If the signals are not identical, we can see a similar evolution for both models
and both signals, which allows to validate the behavior of the FAST model in comparison to the
Bladed model.
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
36
FIGURE 20 MX AT TOWER TOP FOR A TURBULENT WIND OF 12 M/S FOR FAST MODEL (IN GREY) AND BLADED
MODEL (IN YELLOW)
FIGURE 21 MY AT TOWER TOP FOR A TURBULENT WIND OF 12 M/S FOR FAST MODEL (IN GREY) AND BLADED
MODEL (IN YELLOW)
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
37
13 Downscaling for test tank A principal objective of the model-tests in the basin is to account for the coupling occurring
between the turbine, the floater and its mooring system. In today’s state of the art of FOWT testing,
two techniques stand out in terms of their completeness. One is to use a scaled turbine in a real
wind field, while the other is to use actuators commanded by software. The common basic ground
of these techniques is to represent the thrust and its action point correctly. However, more
components of the wind turbine loads can be included during the tests depending on the selected
method and the design of the experimental set-up. In this light, it is necessary to have a good
idea of which wind turbine load components influenced the motion response of the FOWT. The
selection of the most relevant load components needs to be supported by preliminary results of
the numerical study of the FOWT. This will also help us to choose the best method for our goals.
For the time being, two options are considered:
1) Physical turbine in generated wind
2) Hybrid testing where the loads are calculated by software and apply through actuators.
Two types of actuators can be considered:
a) Winches
b) Fans
The selection of the method and the collection of all technical information relevant for each
method will be done before the engineering of the model (planned to start on week 43 of 2020).
This point is included in the list of holds in section 14. Although, accurate descriptions of these
two methods can be found in literature (e.g.:[7], [8]), the authors are just aware one publication to
come that covers them both in sufficient detail and can assist decision-making ([9]).
TABLE 6 INTERFACE BETWEEN WP4 (INTEGRATED MODELLING) AND WP5 (DEMONSTRATION)
13.1 Physical turbine in generated wind
WP4
•D4.2 Specifications of a generic wind turbine
•D4.5 Integrated modelling
Interface
•Share steady state performance of the generic wind turbine
•Share finalized geometry and mass distribution
•Share extreme loads in parked conditions
•Share controller of the wind turbine
WP5
•D5.2 Specifications for performing the reduced scale-tests
•D5.3 Reduced scale model design and construction
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
38
WP4 has based its design of the 12MW turbine on the DTU 10MW turbine. MARIN has already
worked out the design of a scale version of the DTU 10MW wind turbine at scale 1:60 (MSWT-
10MW@1/60), in the same way as MARIN has designed, built and tested multiple times a down
scaled NREL 5MW wind turbine for scale 1:50 (MSWT-5MW@1/50). The scale 1:60 was chosen
for the DTU 10MW in relation with the dimension of the wind generator available at MARIN and
the estimated performance of the scale rotor including scale effects. This chapter explains how a
scale turbine is designed with the example of the scaling done for the NREL 5MW wind turbine.
From previous model testing campaigns, it followed that the Reynolds scale effects are
considerable, resulting in a turbine working at a Cp (power coefficient) value between 10-30%,
and a Ct (thrust coefficient) between 30-60% compared to full scale. Therefore, MARIN’s
conclusion was that the turbine blades should not be geometrically scaled, but that a new aerofoil
should be used so that:
The produced axial (drag) load is equal to the Froude scaled full scale value, at the same
Froude scaled rotor RPM.
The manufactured scale wind turbine is an improved version of the wind turbine used during the
model tests for the DeepCwind consortium (geometrical scaled version of the NREL 5MW wind
turbine). An overview of MARIN’s stock wind turbine including tower is presented in the following
pictures. This scale turbine is called MSWT-5MW@1/50 in this section.
FIGURE 22 COMPLETED TURBINE IN THE
WORKSHOP (MSWT-5MW@1/50)
FIGURE 23 CAD DESIGN OF THE MSWT-5MW@1/50
The blades of this stock wind turbine are manufactured from carbon fibre in an aluminium mould
with an accuracy of 0.5mm, to ensure stiff and light blades.
The MSWT-5MW@1/50 is designed according to the following specifications:
• active pitch control of 42 deg/s (model scale) blade pitch change off all three blades
together
Deliverable 4.2 Specifications of a generic wind turbine
FLOTANT has received funding from the European Union´s Horizon 2020
research and innovation programme under grant agreement No.815289
Doc.Nº: 190927-FLT-WP4_D-4-2_V2 Date: 31/10/2019
39
• blade pitch angle derived from pitch motor pulse signal
• thrust and torque measured directly behind rotor head
• 6-comp force frame below nacelle (thrust and torque)
• rotor RPM based on motor pulse signal
• nacelle acceleration
• soft measurement cables
The correct RPM of the rotor is set by a servo. The RPM and torque are measured. The correct
RPM setting for each wind speed has to be provided before the tests. This can be done using
information provided by WP4.
The measured Ct and Cp at the design pitch of 0 degrees are presented in the following figures
and are compared to the NREL 5MW specified values for different tip speed ratio’s (TSR’s)
FIGURE 24 CT AND CP CURVE MARIN STOCK TURBINE FOR RATED PITCH MEASURED IN THE MODEL TESTING
BASIN COMPARED TO THE FULL SCALE NREL 5MW WIND TURBINE BEM RESULTS
Next to the MSWT-5MW@1/50, MARIN has also finalized the design of a scaled down version of
the DTU 10MW wind turbine for scale 1/60. This new scale turbine is called MSWT-10MW@1/60
in this document. The calculated Ct and Cp at the design pitch of 0 degrees are presented in
below figure and are compared to the NREL 5MW specified values for different tip speed ratio’s
(TSR’s)
0
0.1
0.2
Recommended