1
CHEE 319CHEE 319Process Dynamics and ControlProcess Dynamics and Control
Winter 2012Winter 2012
Instructor:Instructor:M.GuayM.Guay
TAs: S. Dougherty, D.TAs: S. Dougherty, D. Park and E.Park and E. MoshksarMoshksar
2
OrganizationOrganization
Instructor: Dr. Martin Guay Office: Dupuis 406 Phone: 533-2788 Email: [email protected] Web: http://chee.queensu.ca/courses/CHEE319/
3
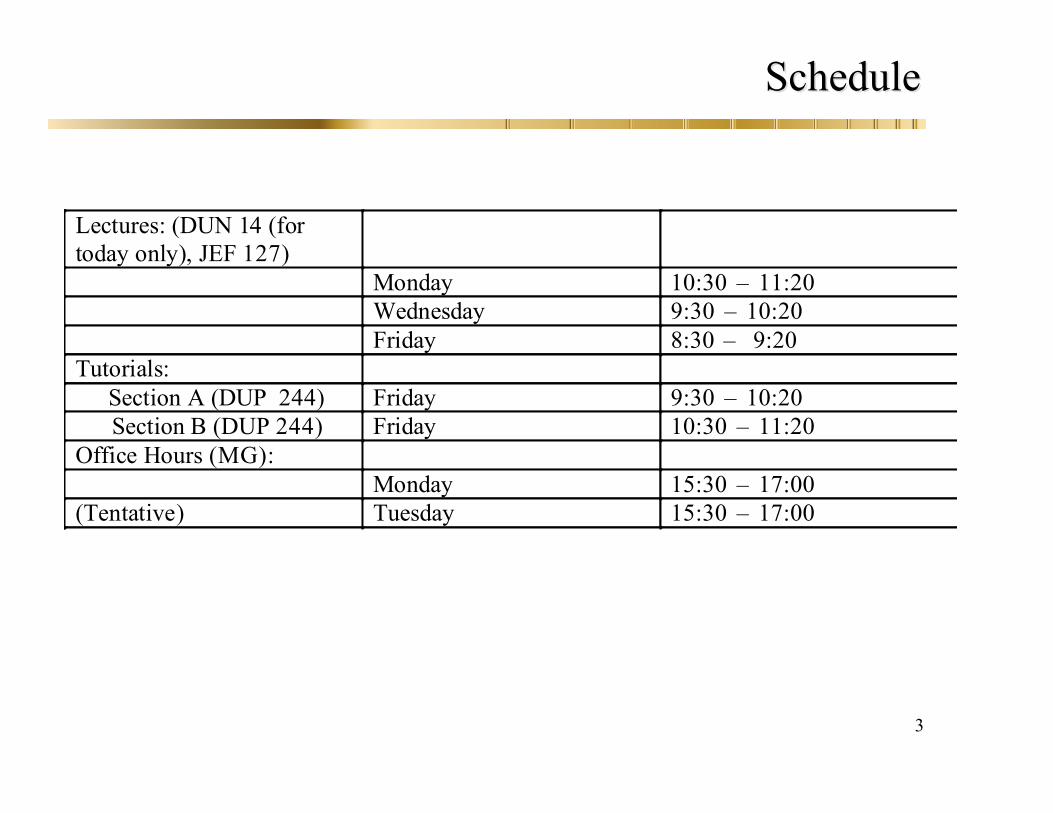
ScheduleSchedule
Lectures: (DUN 14 (for today only), JEF 127)
Monday 10:30 – 11:20 Wednesday 9:30 – 10:20 Friday 8:30 – 9:20 Tutorials:
Section A (DUP 244) Friday 9:30 – 10:20 Section B (DUP 244) Friday 10:30 – 11:20
Office Hours (MG): Monday 15:30 – 17:00 (Tentative) Tuesday 15:30 – 17:00
4
ReferencesReferences
All lectures will be available onlineAll lectures will be available online Derivations will be done on the boardDerivations will be done on the board Powerpoint Powerpoint slides are to support lecturesslides are to support lectures
Textbook (highly recommended)Textbook (highly recommended)
D.E. D.E. SeborgSeborg, T.F. Edgar, D.A. , T.F. Edgar, D.A. MellichampMellichamp, , Process Dynamics andProcess Dynamics andControl (2nd or 3rd Edition)Control (2nd or 3rd Edition), Wiley, NJ (2003, 2009)., Wiley, NJ (2003, 2009).
5
GradingGrading
Grading Midterm (TBDIC) 25% Assignments 15% Final Exam 60%
6
GuidelinesGuidelines
i) Assignments
Problems will be assigned every week. Although they will not bemarked, weekly tutorials will be concentrated on the solution of theproblems and on questions that may arise from the course.
Collaboration is encouraged throughout the course. It is recommendedthat the students develop their own individual solutions.
There will be a set of assignments that will be marked. They are to becompleted in groups of 4-5. With one assignment per group.
ii) Exams
Midterm exam will be open-book. Textbooks, course notes andassignments will be allowed. The final will be closed-book.
The timing of the midterm exam will be decided in class. (Likely tobe after reading week.)
7
Course ObjectivesCourse Objectives
By the end of this course the student should be able to:
derive transfer function models from process models andprocess data
recognize important process dynamic features of SISO lineardynamical systems
apply modern control theory to design a controller foruncertain SISO linear dynamical systems
understand the trade-off in performance that arise in thedesign of a controller
8
Teaching Approach and ExpectationsTeaching Approach and Expectations
Each student is ultimately responsible for learning thematerial in a course. Every professor is responsible forpresenting the course material in a manner that facilitateslearning as much as possible for the class as a whole.
9
Teaching Approach and ExpectationsTeaching Approach and Expectations
In fulfilling this contract, I expect that you will activelyand constructively participate in the course. ask questions whenever something is not clear, help each other understand the course material, perform all assigned reading on time, arrive on-time for class, be courteous to each other and myself, provide me with feedback / suggestions as to how the course and
my delivery can be improved.
10
Teaching Approach and ExpectationsTeaching Approach and Expectations
In return you should expect me to: treat each of you with courtesy and respect, be committed to help you understand and master the course
material, by being available for out of class assistance, by providing competent teaching assistants, by working to continually improve the course, treat each question or concern seriously and answer these to the
best of my ability.
Class discussions and student participation are encouragedas much as possible, in and out of the classroom
11
Course OutlineCourse Outline
1. Introduction2. Modeling for control3. Solution of Linear ODEs using Laplace transforms4. Transfer function models of mechanical systems5. Analysis of Continuous-time Linear Systems6. SISO Control System Analysis7. Synthesis of SISO Controllers8. SISO Controller Design
12
IntroductionIntroduction
Feedback systems are commonplace in almost every aspect of lifeFeedback systems are commonplace in almost every aspect of life Standing, walking, running Standing, walking, running etcetc…… are all forms of control systems whereare all forms of control systems where
thethe centralcentral nervous system reacts to variousnervous system reacts to various biosensor mechanismsbiosensor mechanisms Gene regulation is controlled by complex responses that trigger variousGene regulation is controlled by complex responses that trigger various
biological mechanismsbiological mechanisms
In engineering applications, feedback systemsIn engineering applications, feedback systems arise in the designarise in the design ofofcontrol systemscontrol systems Aircraft flight control, sAircraft flight control, satellite altitude controlatellite altitude control Automotive controlAutomotive control Communication systemsCommunication systems RoboticsRobotics Manugfacturing Manugfacturing systems and industrial process systems and industrial process cotnrolcotnrol
Control is the Control is the hidden technologyhidden technology ItIt’’s everywhere, buts everywhere, but hidden by the machinery.hidden by the machinery.
13
IntroductionIntroduction
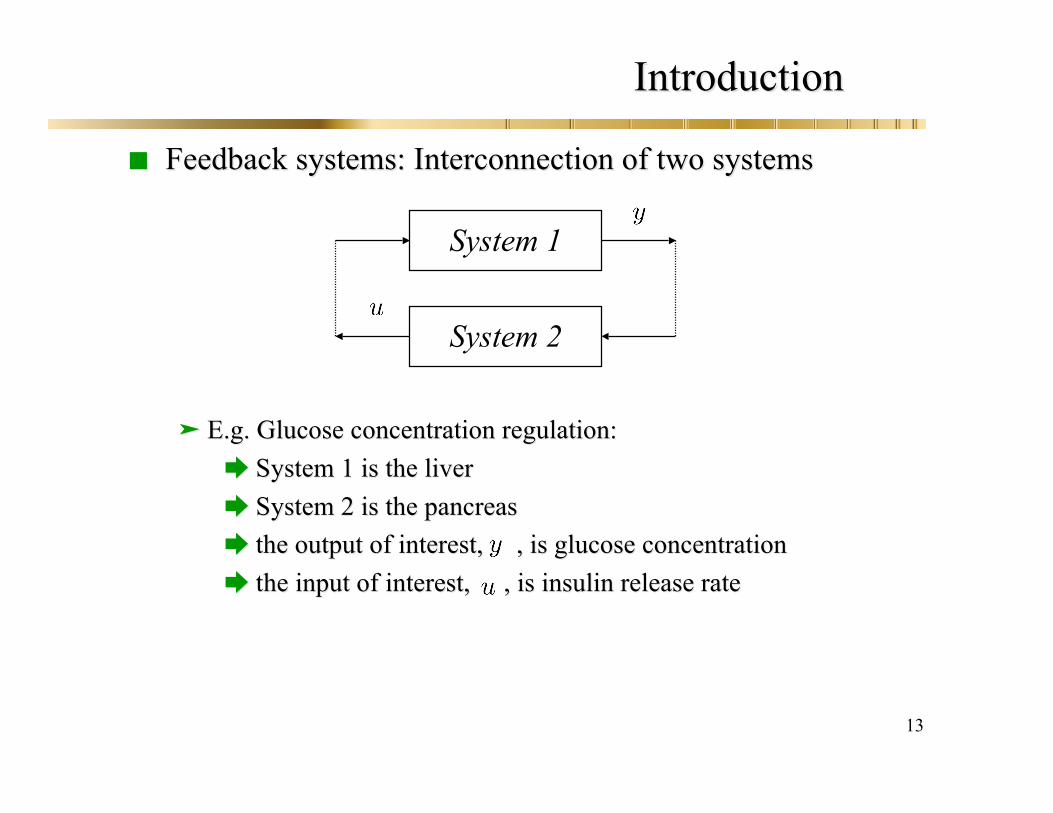
Feedback systems: Interconnection of two systemsFeedback systems: Interconnection of two systems
E.g.E.g. Glucose concentration regulation:Glucose concentration regulation: System 1 is the liverSystem 1 is the liver SystemSystem 2 is the pancreas2 is the pancreas the output of interest, , is glucose concentration the output of interest, , is glucose concentration the input of interest,the input of interest, , is insulin release rate, is insulin release rate
System 1
System 2
14
ControlControl
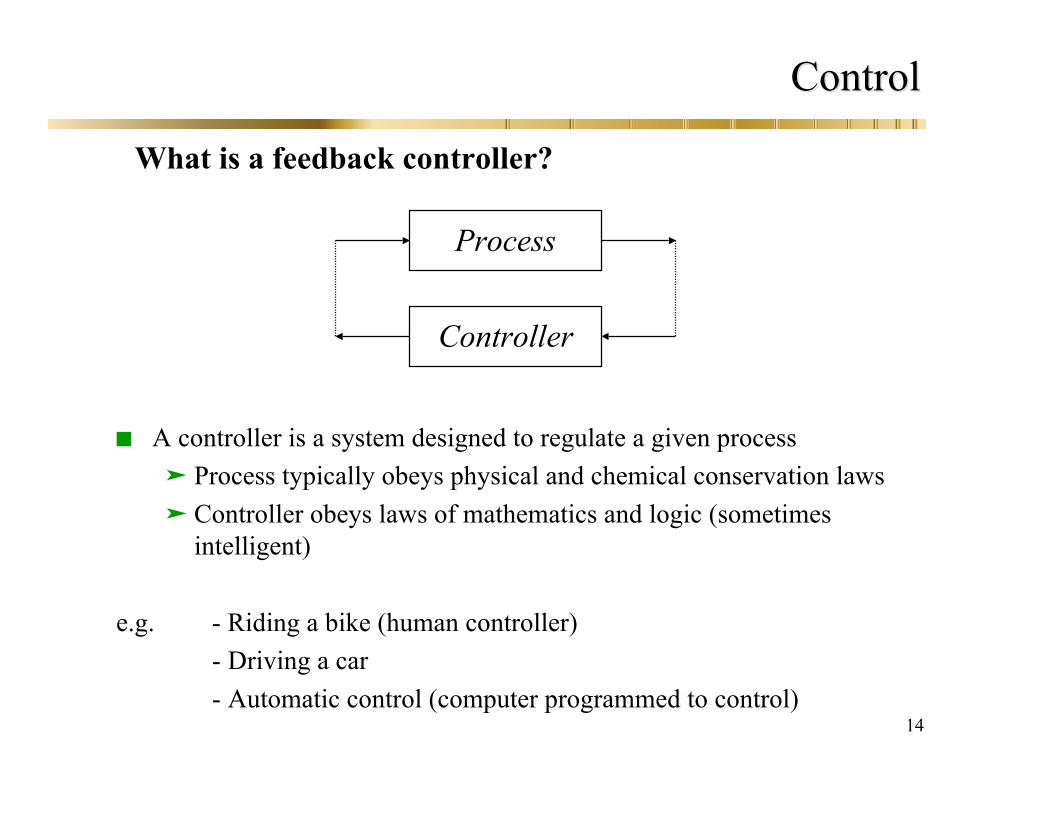
A controller is a system designed to regulate a given process Process typically obeys physical and chemical conservation laws Controller obeys laws of mathematics and logic (sometimes
intelligent)
e.g. - Riding a bike (human controller)- Driving a car- Automatic control (computer programmed to control)
Process
Controller
What is a feedback controller?
15
ControlControl
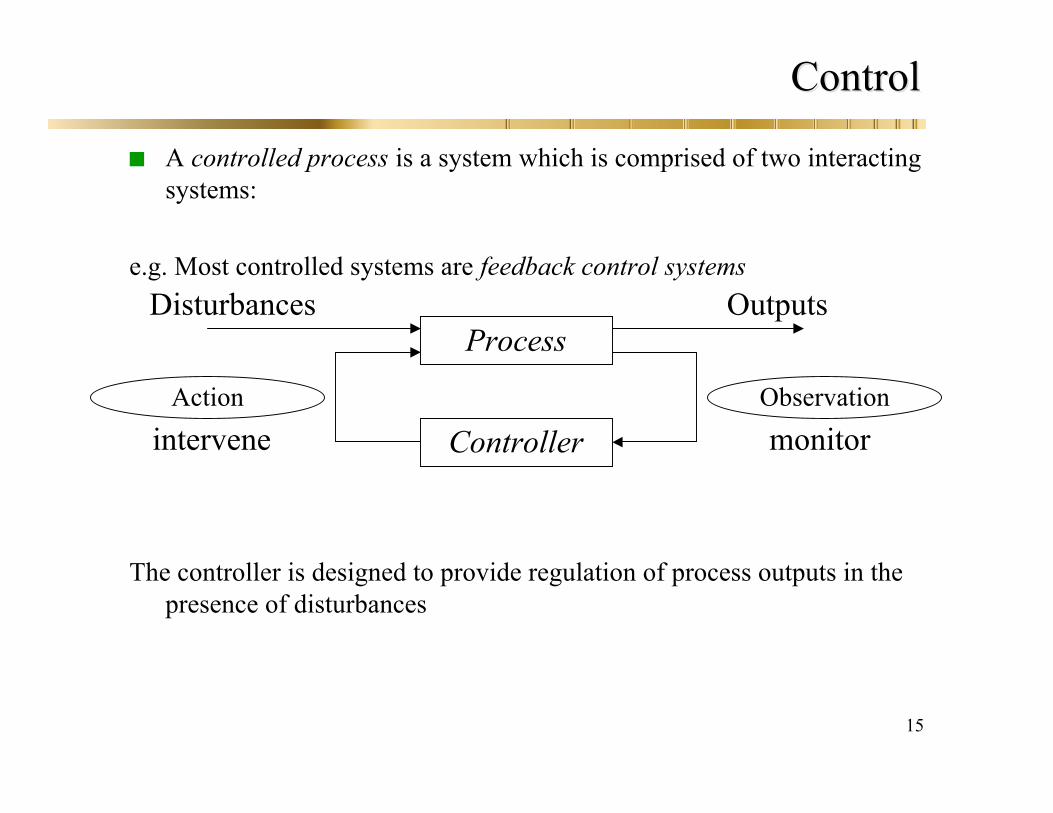
A controlled process is a system which is comprised of two interactingsystems:
e.g. Most controlled systems are feedback control systems
The controller is designed to provide regulation of process outputs in thepresence of disturbances
Process
Controller
OutputsDisturbances
Action Observation
monitorintervene
16
Classical Feedback ControlClassical Feedback Control
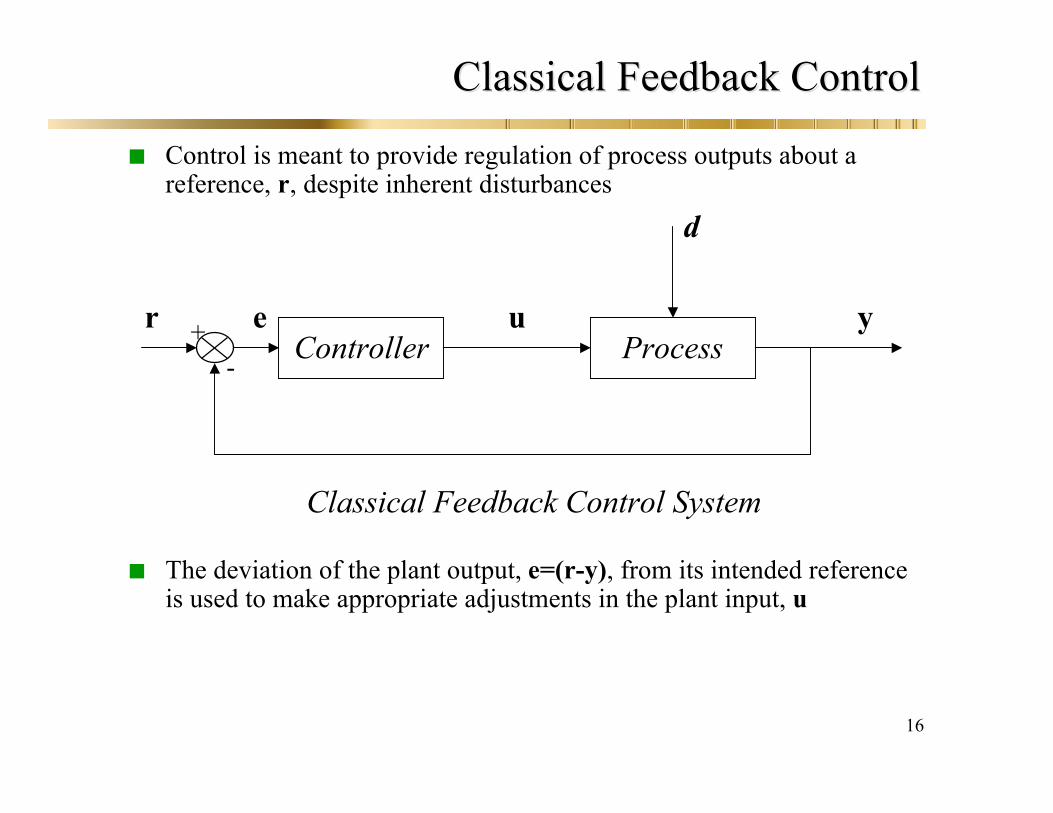
Control is meant to provide regulation of process outputs about areference, r, despite inherent disturbances
The deviation of the plant output, e=(r-y), from its intended referenceis used to make appropriate adjustments in the plant input, u
Classical Feedback Control System
ProcessController
d
yur e+-
17
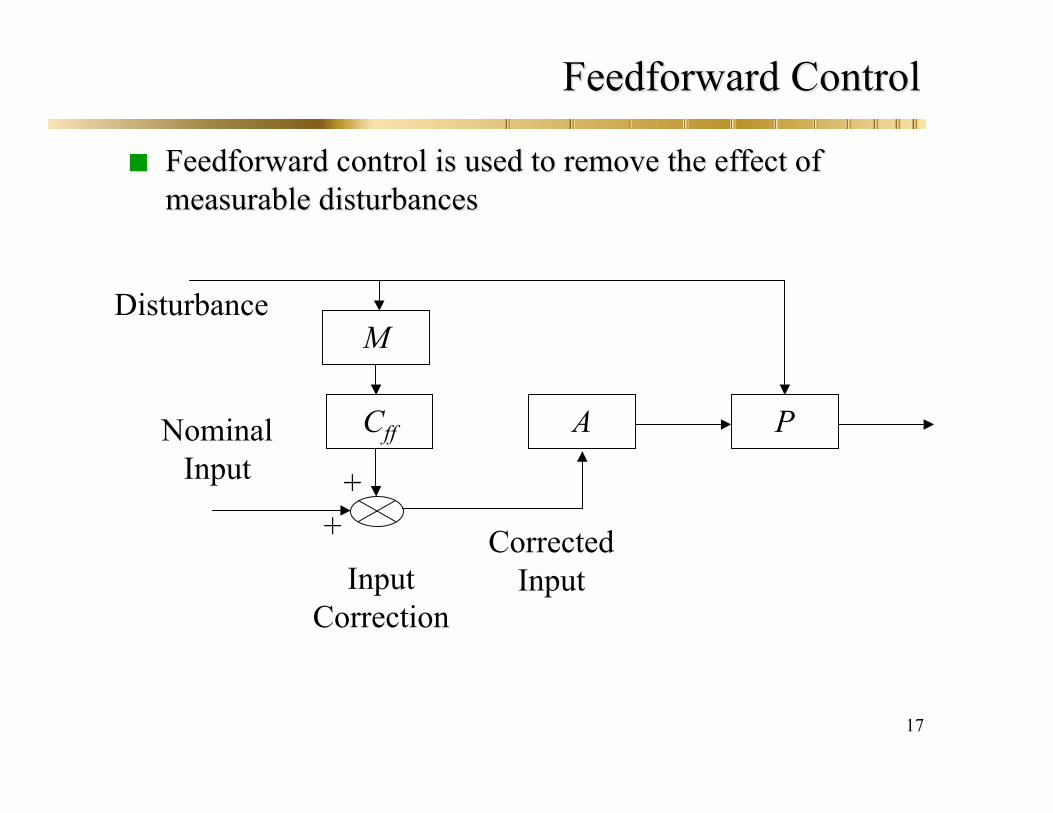
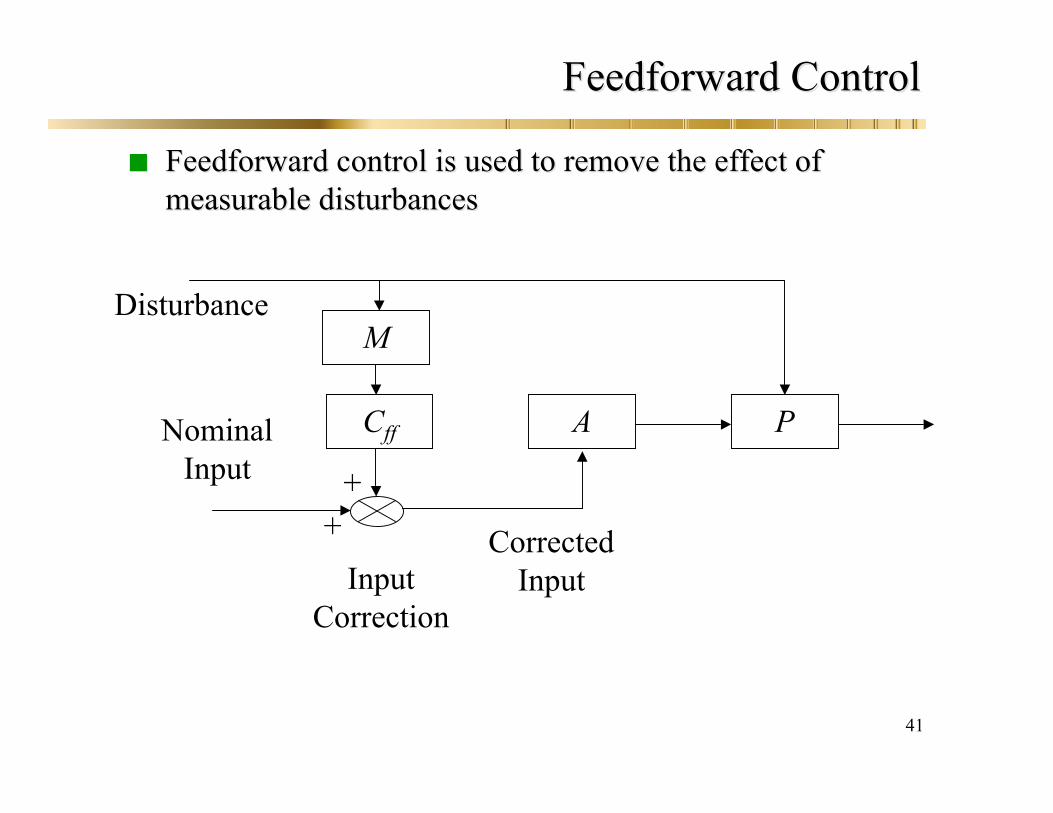
Feedforward Feedforward ControlControl
Feedforward Feedforward control is used to remove the effect ofcontrol is used to remove the effect ofmeasurable disturbancesmeasurable disturbances
A PCff
MDisturbance
NominalInput
CorrectedInput
++
InputCorrection
18
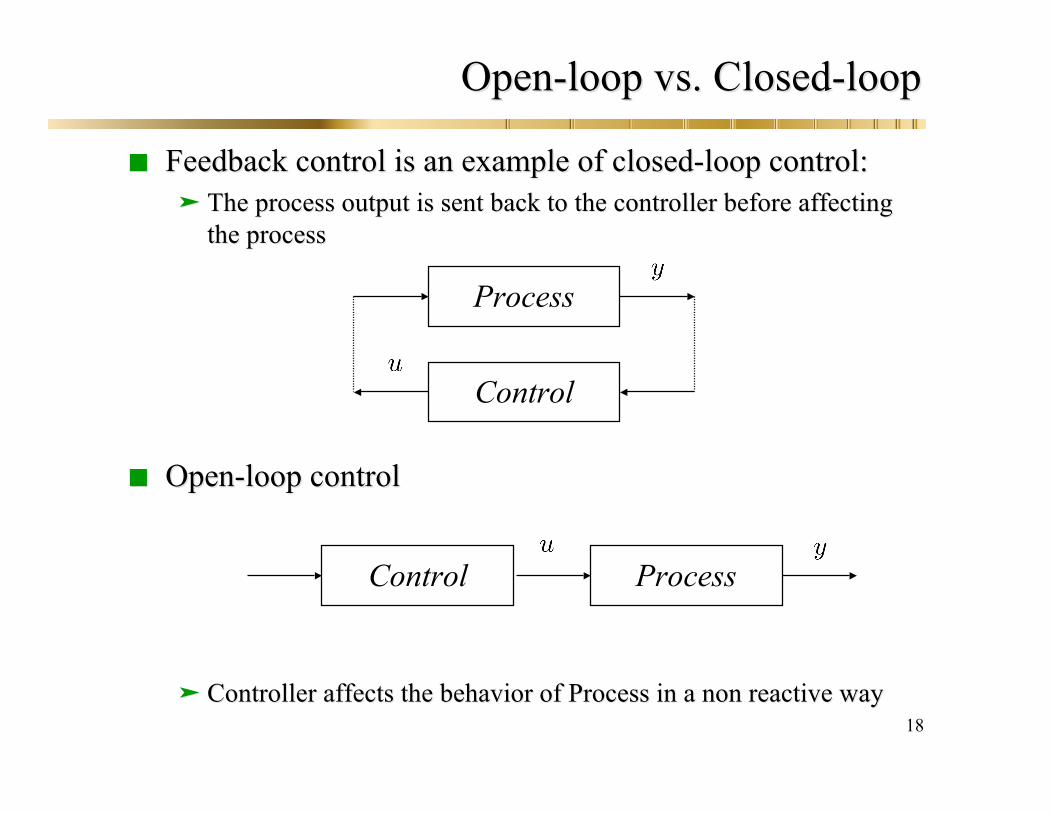
Open-loop Open-loop vsvs.. Closed-loopClosed-loop
Feedback control is an example of closed-loop control:Feedback control is an example of closed-loop control: The process output is sent back to the controller before affectingThe process output is sent back to the controller before affecting
the processthe process
Open-loop controlOpen-loop control
Controller affects the behavior of Process in a non reactive wayController affects the behavior of Process in a non reactive way
Process
Control
ProcessControl
19
HistoricalHistorical PerspectivePerspective Control goes back to the 19thControl goes back to the 19th centurycentury
Central theme in many important areasCentral theme in many important areas
Major impact in fMajor impact in flight controllight control
““We know how to construct airplanes.We know how to construct airplanes. Men also know how to buildMen also know how to buildengines. engines. Inability to balance and steer still confronts students ofInability to balance and steer still confronts students ofthe flying problemthe flying problem. When one feature has been worked out, the. When one feature has been worked out, theage of flying will have arrived,age of flying will have arrived, for all other difficulties are offor all other difficulties are ofminor importance.minor importance.””
Wilbur Wright (1901)Wilbur Wright (1901)
20
Historical PerspectiveHistorical Perspective
History of flight control is a testament to the importance ofHistory of flight control is a testament to the importance ofcontrol theorycontrol theory
Wright BrothersWright Brothers 19031903 SperrySperry’’s Autopilots Autopilot 19121912 V1 and V2 (A4)V1 and V2 (A4) 19421942 Robert E. LeeRobert E. Lee 19471947 SputnikSputnik 19571957 ApolloApollo 19691969 Mars PathfinderMars Pathfinder 19971997
21
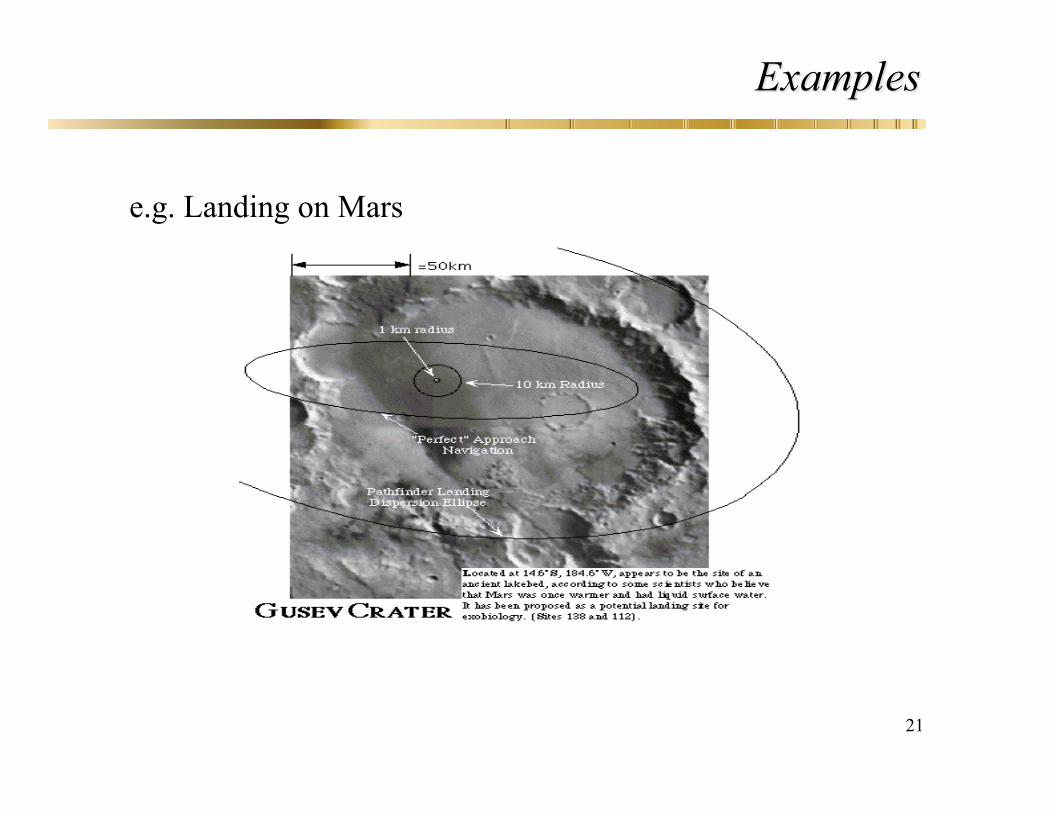
ExamplesExamples
e.g. Landing on Mars
22
Historical PerspectiveHistorical Perspective
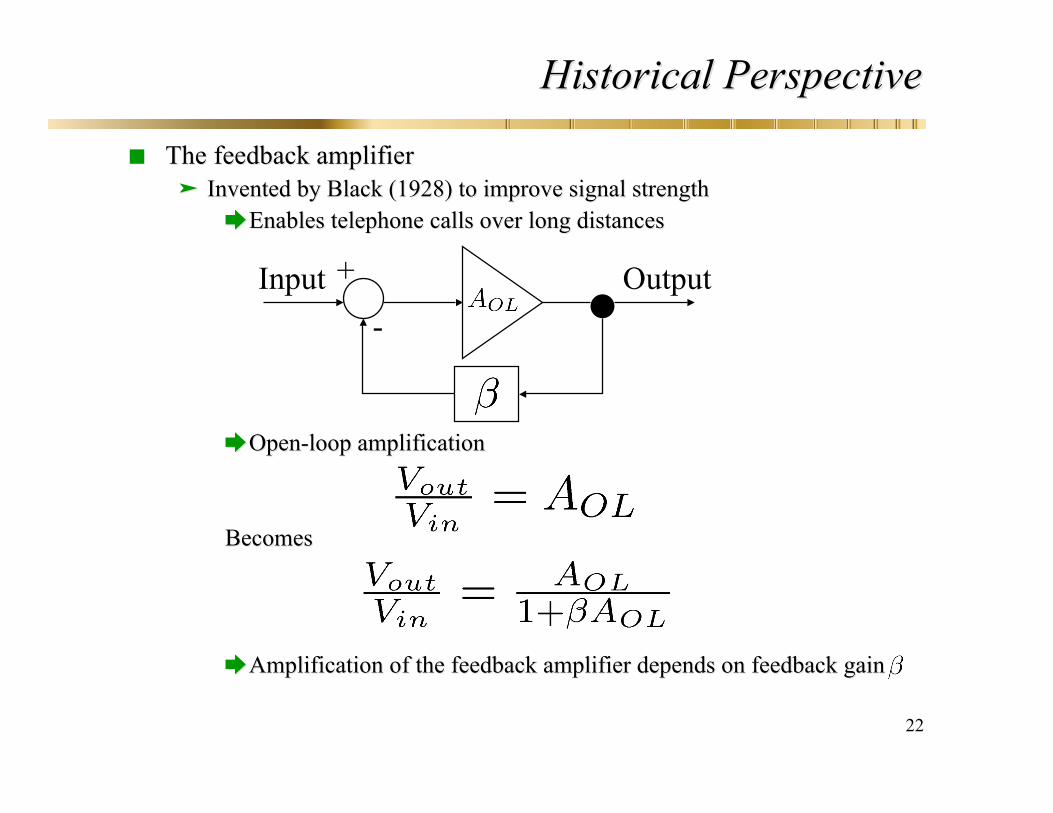
TheThe feedback amplifierfeedback amplifier Invented by Black (1928) to improve signal strengthInvented by Black (1928) to improve signal strength
Enables telephone calls over long distancesEnables telephone calls over long distances
Open-loop amplificationOpen-loop amplification
BecomesBecomes
AmplificationAmplification of the feedback amplifier depends on feedback gainof the feedback amplifier depends on feedback gain
OutputInput +
-
23
Historical PerspectiveHistorical Perspective
TheThe invention of the feedback amplifierinvention of the feedback amplifier is fundamentalis fundamental
FormsForms the basis for the design of world wide telephone/televisionthe basis for the design of world wide telephone/televisionnetworksnetworks
Confirms the importance of feedback system designConfirms the importance of feedback system designNyquist Nyquist stability theoremstability theorem 19321932BodeBode’’s s work on feedback designwork on feedback design 19401940
Provides the framework for modern control system theory andProvides the framework for modern control system theory andcontrol system designcontrol system design
24
Historical PerspectiveHistorical Perspective
By 1940, theBy 1940, the magic of feedback was understoodmagic of feedback was understood An extra component to be considered forAn extra component to be considered for process design to:process design to:
Keep key variables constantKeep key variables constantStabilize unstable systemsStabilize unstable systemsReduce the effects of disturbancesReduce the effects of disturbances andand process variationsprocess variations
Main drawback: can de-stabilize stable processesMain drawback: can de-stabilize stable processes
Principles of feedback applied in:Principles of feedback applied in: Power electronicsPower electronics Industrial process controlIndustrial process control Flight controlFlight control TelecommunicationsTelecommunications
But, the similarities between all applications were not understood yet.But, the similarities between all applications were not understood yet.
25
Historical PerspectiveHistorical Perspective
From 40s, a new field emergesFrom 40s, a new field emerges Similarities between applications are understood leading to theSimilarities between applications are understood leading to the
uunification ofnification ofSolid theoretical frameworkSolid theoretical frameworkSound designSound design methodologymethodologyDesign principlesDesign principlesApplicationsApplications
Modern Control systemsModern Control systems Well established body of ideas, concepts, theory and designWell established body of ideas, concepts, theory and design
methods.methods. Wide and growing scope of applicationsWide and growing scope of applications Remains a very active area of research and developmentRemains a very active area of research and development……
26
IntroductionIntroduction
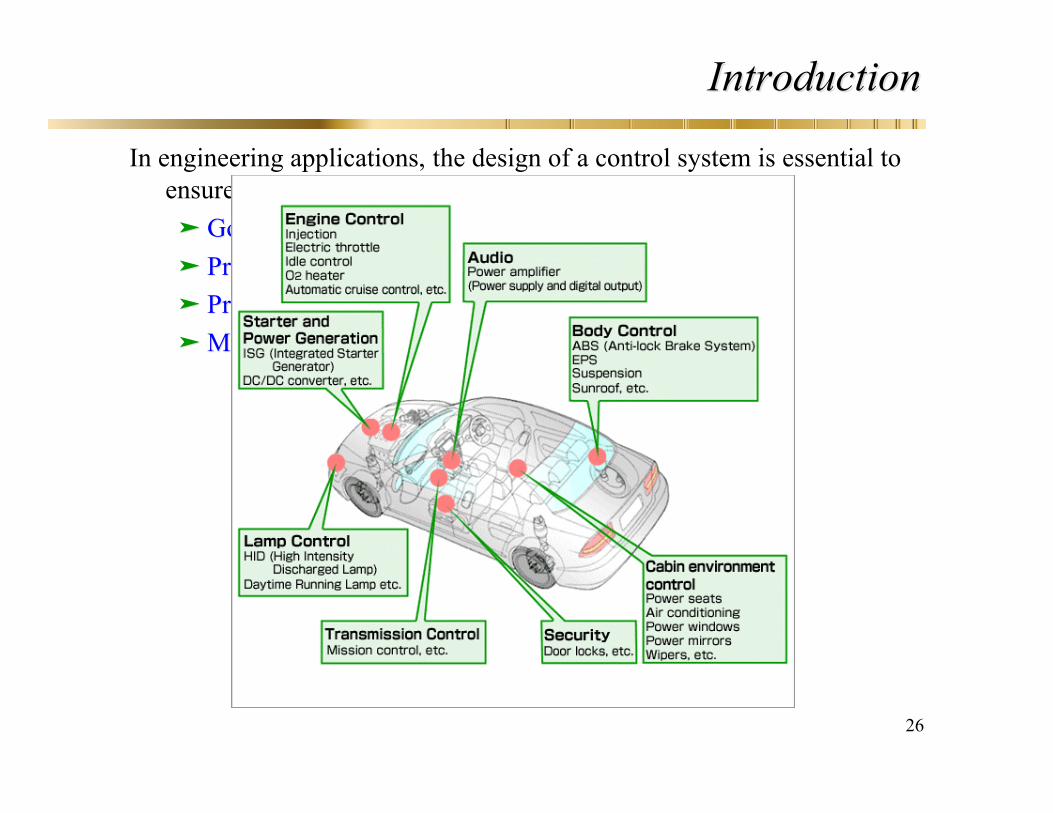
In engineering applications, the design of a control system is essential toensure: Good Process OperationGood Process Operation Process SafetyProcess Safety Product QualityProduct Quality Minimization of Environmental ImpactMinimization of Environmental Impact
27
IntroductionIntroduction
What is the purpose of a control system?What is the purpose of a control system?
“To maintain important process characteristics at desired targetsdespite the effects of external perturbations.”
Control
PlantProcessingProcessingobjectivesobjectives
SafetyMake $$$
Environment...
PerturbationsPerturbations
MarketEconomyClimateUpsets...
28
IntroductionIntroduction
Dynamics:
Study of the transient behavior of processes
Control:
the use of process dynamics for the improvement of processoperation and performance
the use of process dynamics to alleviate the effect of undesirable(unstable) process behaviors
29
IntroductionIntroduction
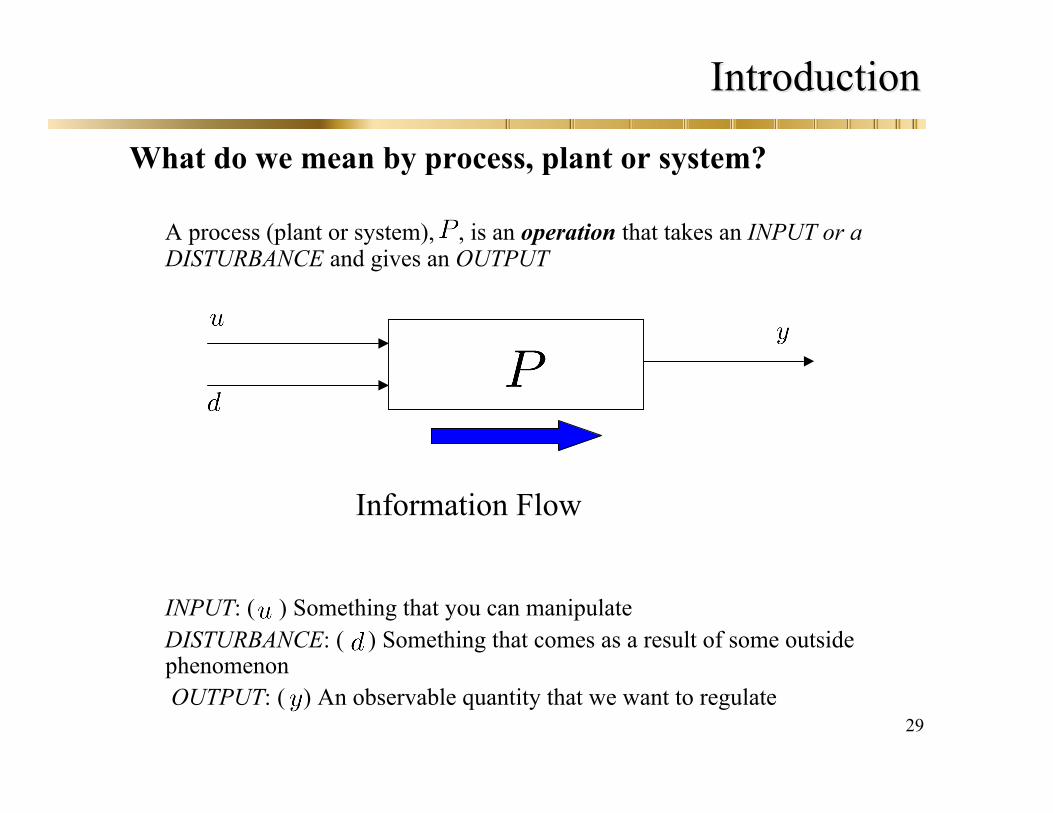
What do we mean by process, plant or system?
A process (plant or system), , is an operation that takes an INPUT or aDISTURBANCE and gives an OUTPUT
INPUT: ( ) Something that you can manipulate DISTURBANCE: ( ) Something that comes as a result of some outside
phenomenon OUTPUT: ( ) An observable quantity that we want to regulate
Information Flow
30
ExamplesExamples
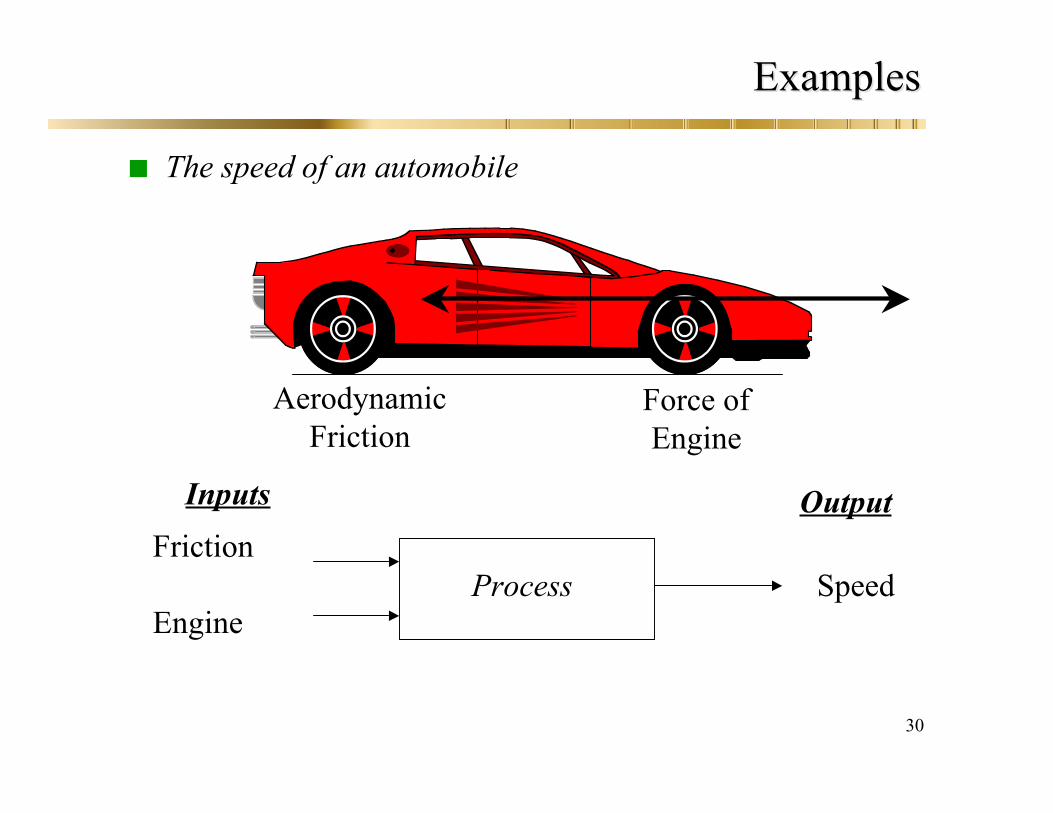
The speed of an automobile
Force ofEngine
AerodynamicFriction
Inputs OutputFriction
EngineSpeedProcess
31
ExamplesExamples
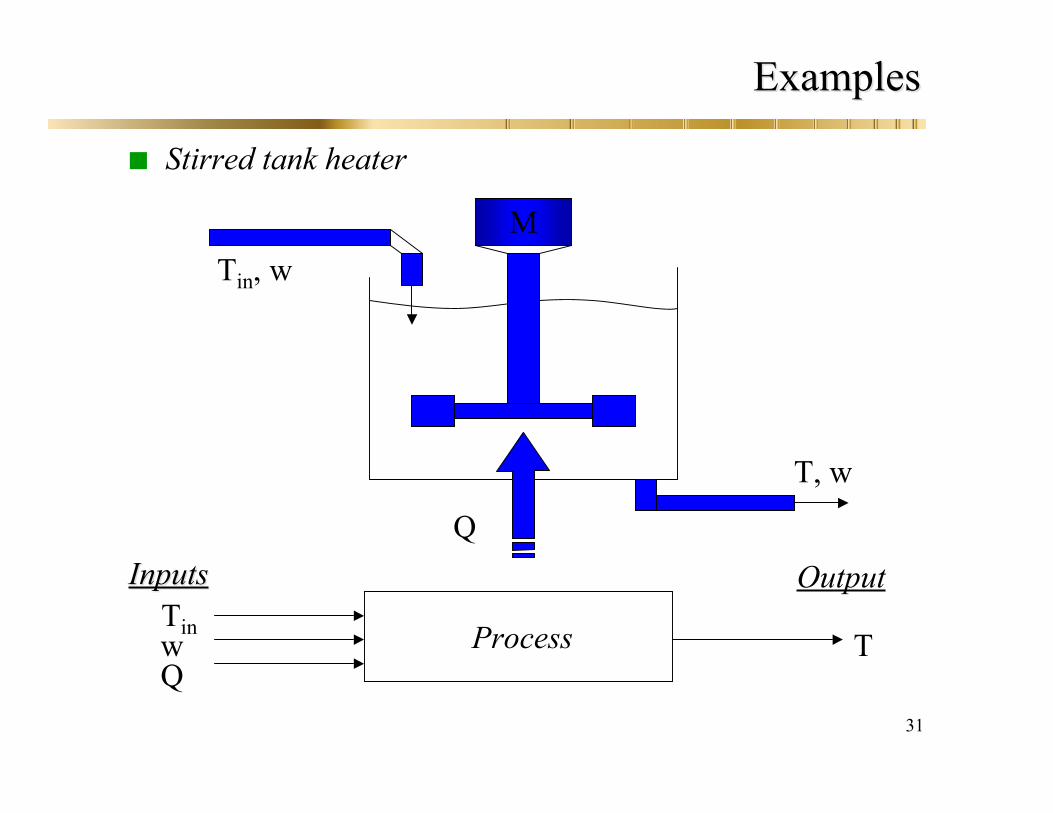
Stirred tank heater
MTin, w
Q
T, w
TinwQ
TProcess
InputsInputs Output
32
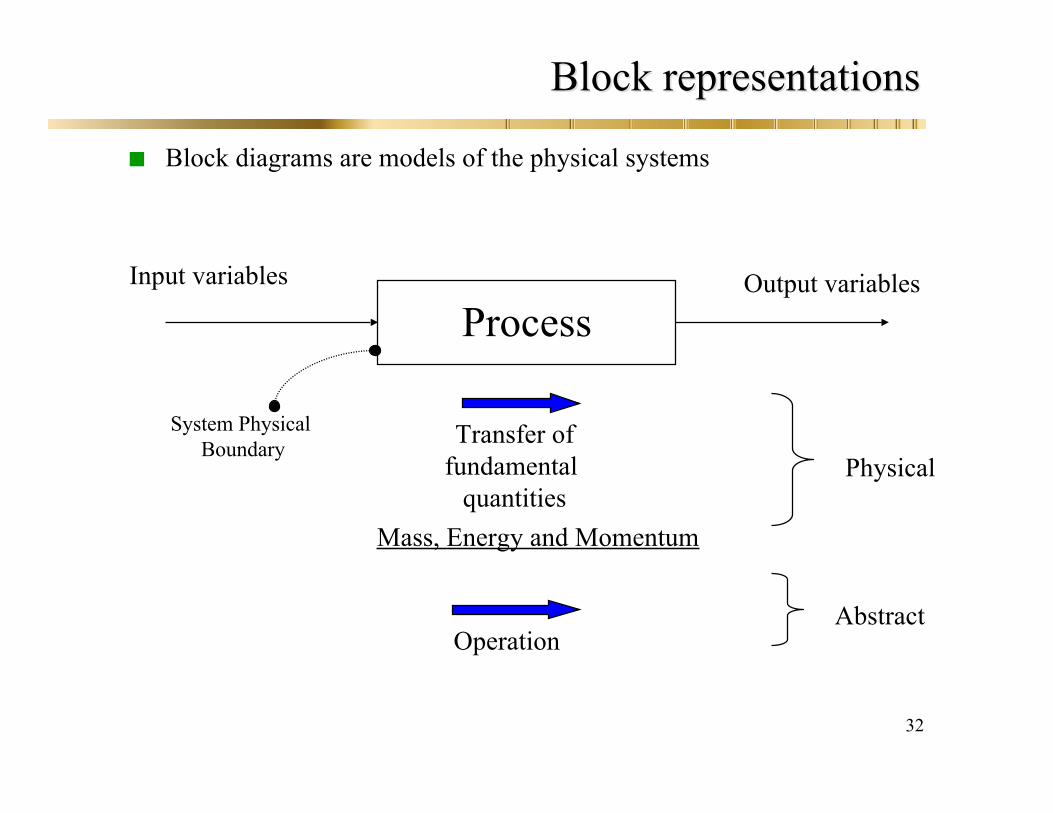
Block representationsBlock representations
Block diagrams are models of the physical systems
Process
System Physical Boundary Transfer of
fundamental quantities
Mass, Energy and Momentum
Input variables Output variables
Physical
OperationAbstract
33
IntroductionIntroduction
What is required for the development of a control systemWhat is required for the development of a control system??
1. Process UnderstandingRequired measurementsRequired measurementsDynamic modelDynamic modelRequired actuatorsRequired actuatorsUnderstand design limitationsUnderstand design limitations
2. Process InstrumentationAppropriate sensor and actuator selectionAppropriate sensor and actuator selectionIntegration in control systemIntegration in control systemCommunication and computer architectureCommunication and computer architecture
3. Process ControlAppropriate control strategyAppropriate control strategy
34
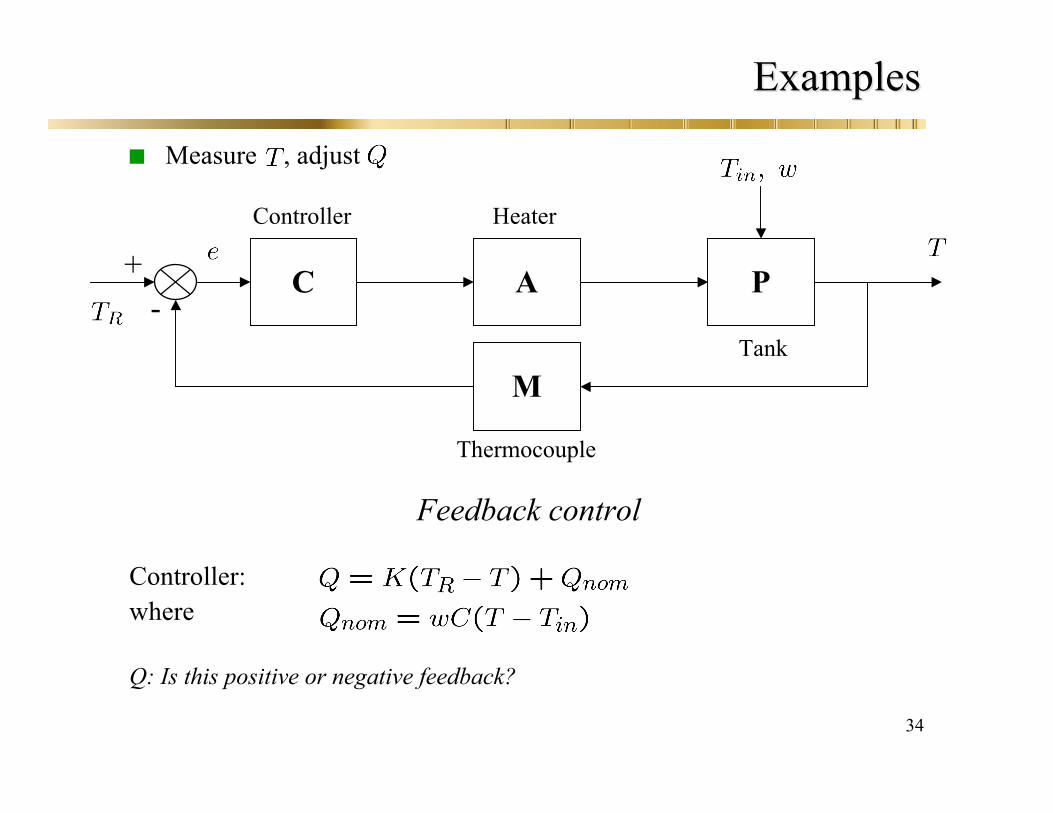
ExamplesExamples
Measure , adjust
Controller:where
Q: Is this positive or negative feedback?
Thermocouple
Feedback control
AC P
M
Controller
Tank-
+Heater
35
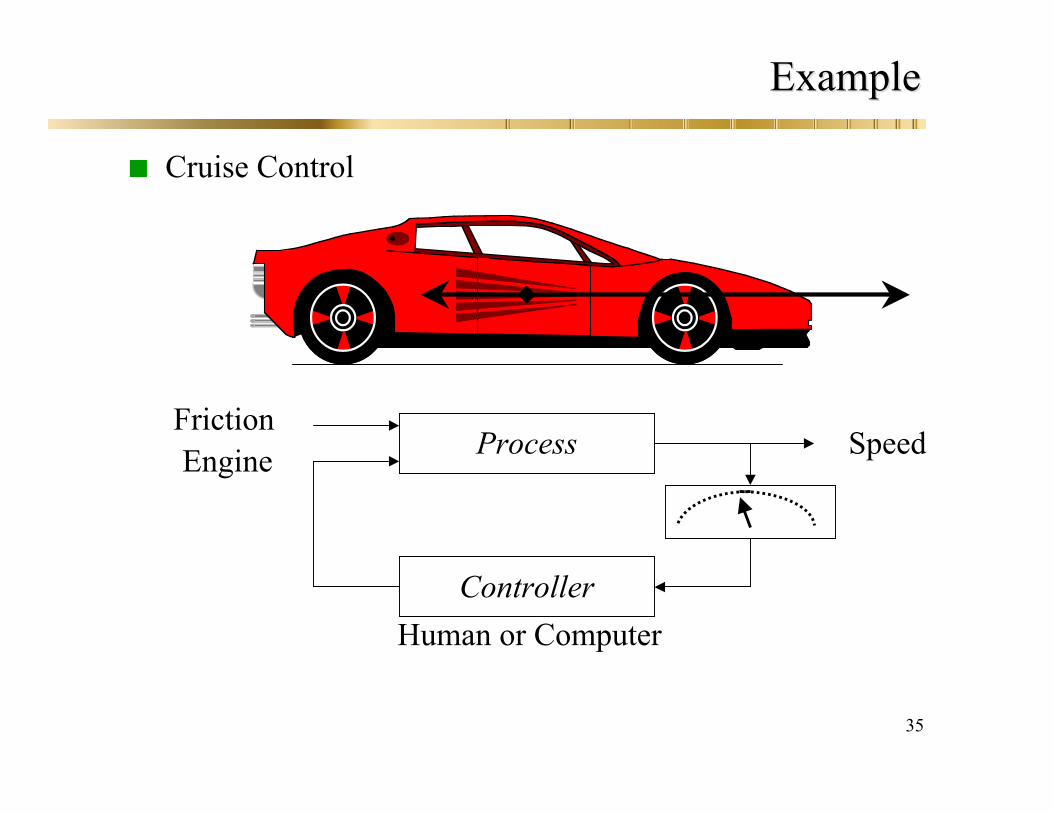
ExampleExample
Cruise Control
Controller
FrictionProcess SpeedEngine
Human or Computer
36
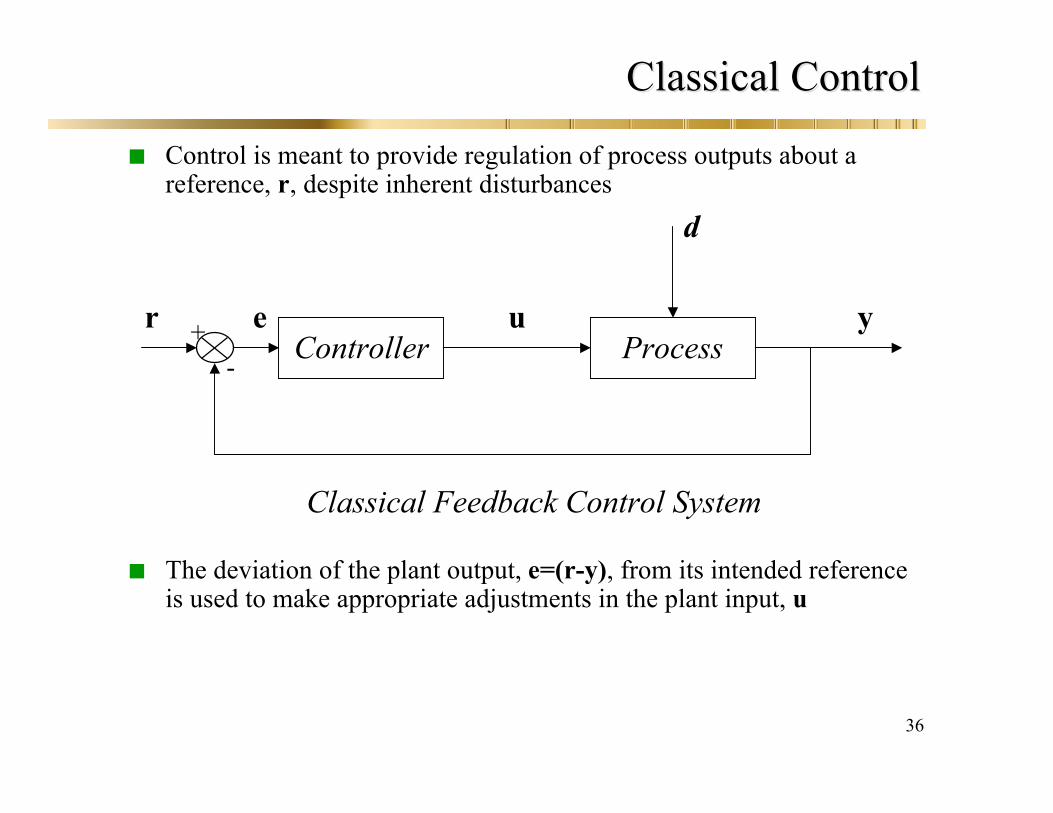
Classical ControlClassical Control
Control is meant to provide regulation of process outputs about areference, r, despite inherent disturbances
The deviation of the plant output, e=(r-y), from its intended referenceis used to make appropriate adjustments in the plant input, u
Classical Feedback Control System
ProcessController
d
yur e+-
37
ControlControl
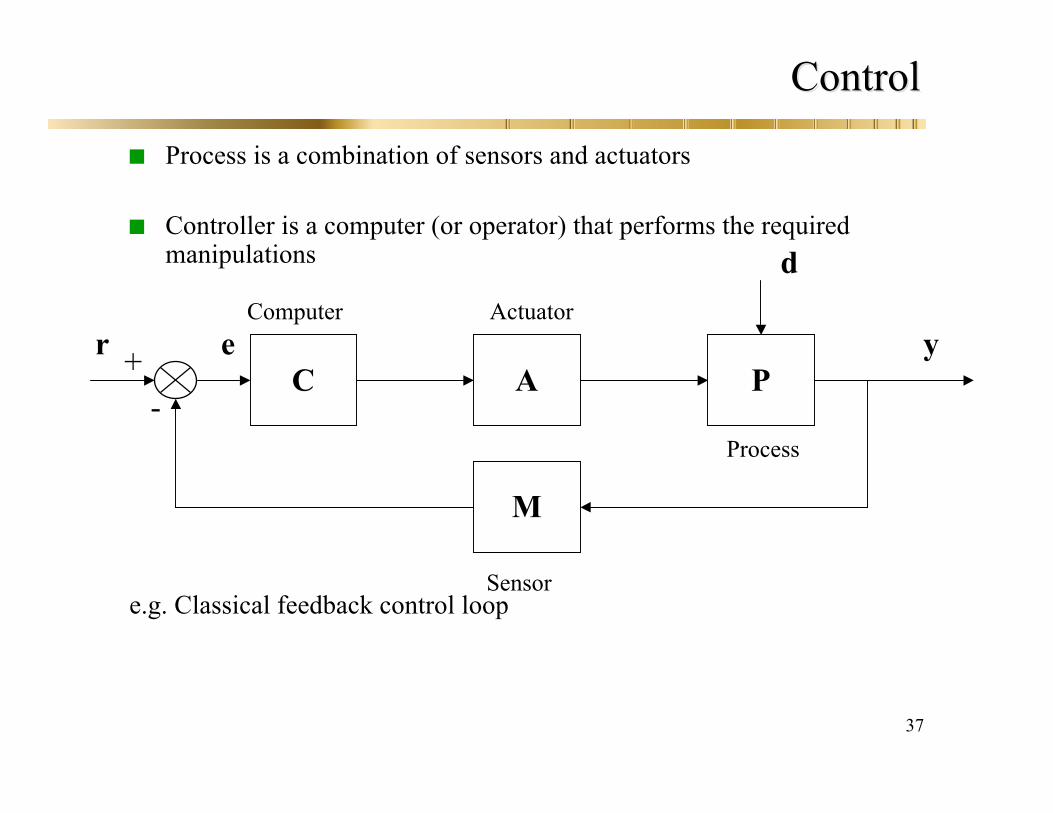
Process is a combination of sensors and actuators
Controller is a computer (or operator) that performs the requiredmanipulations
e.g. Classical feedback control loop
yr eAC P
M
dComputer Actuator
Process
Sensor
-+
38
ExamplesExamples
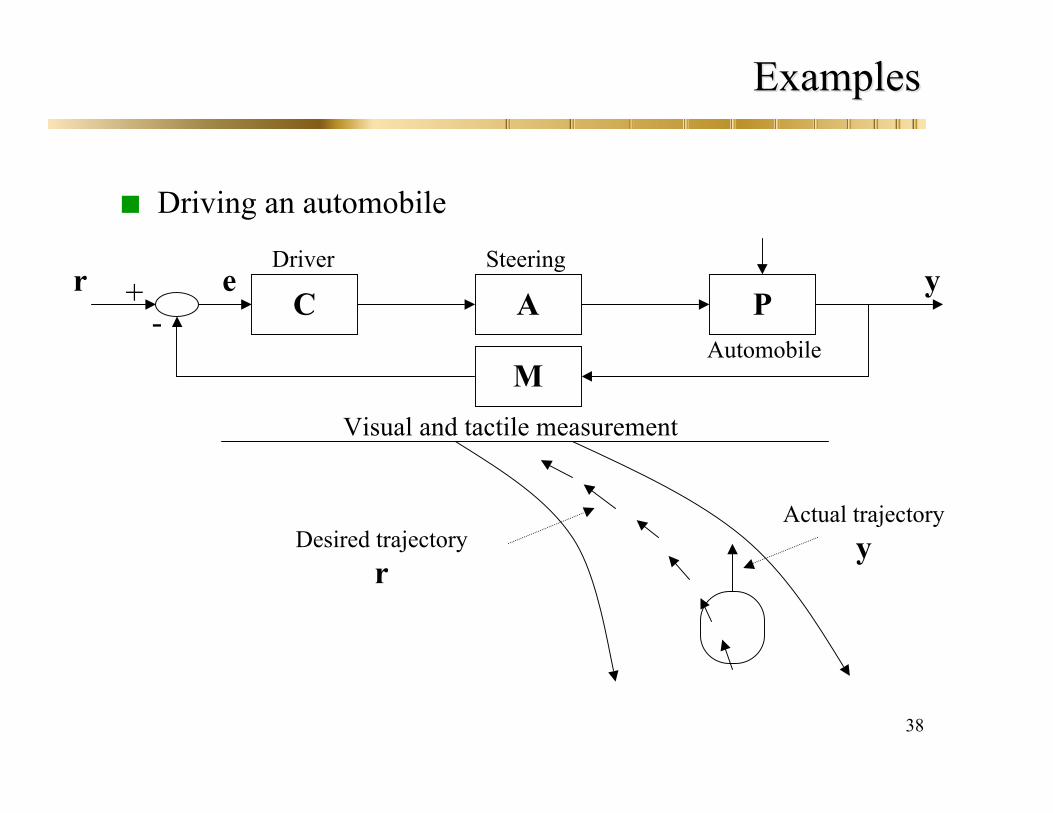
Driving an automobile
yeAC P
M
Driver
Automobile-
+Steering
r
Visual and tactile measurement
Desired trajectoryr
Actual trajectoryy
39
ExamplesExamples
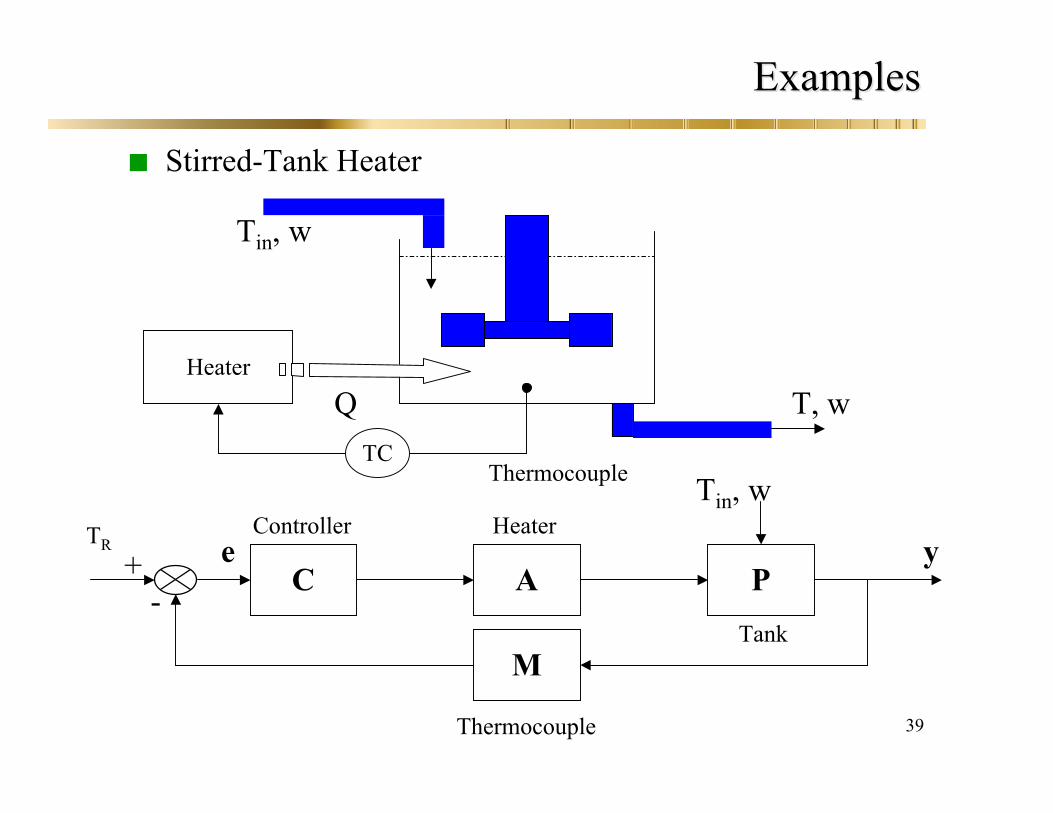
Stirred-Tank Heater
Q T, wHeater
TCThermocouple
Tin, w
TR
Tin, w
yeAC P
M
Controller
Tank-
+Heater
Thermocouple
40
ExamplesExamples
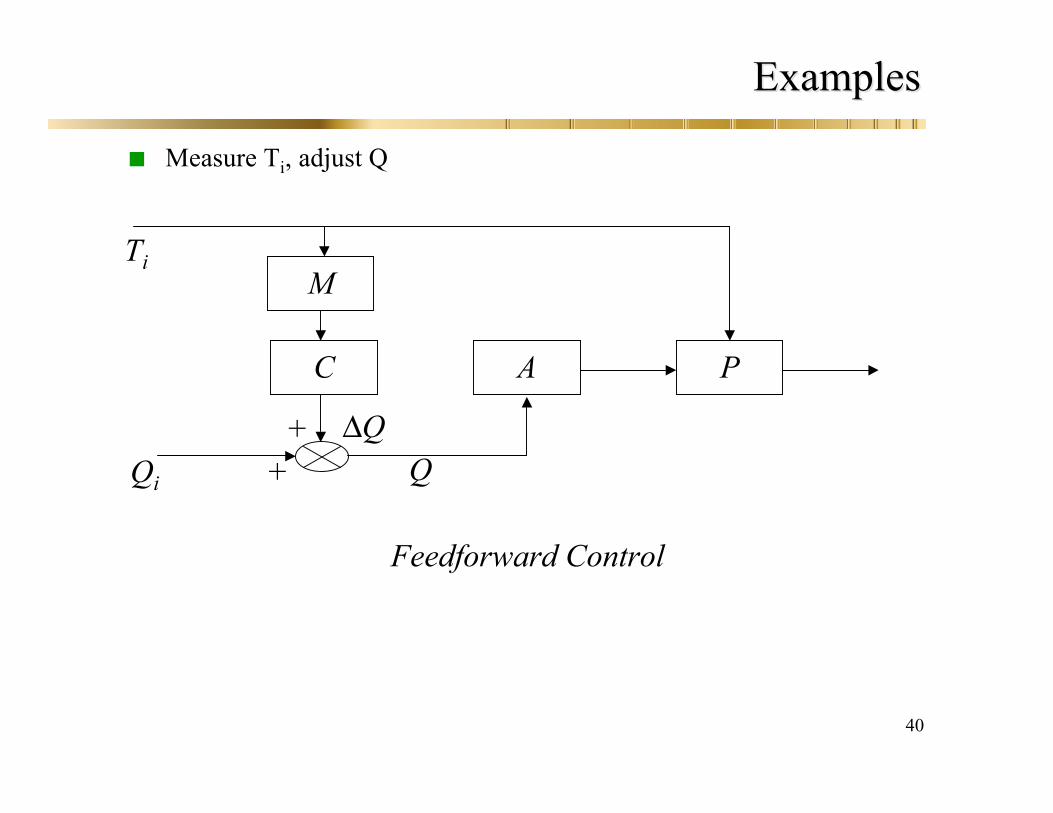
Measure Ti, adjust Q
A PC
MTi
Qi
ΔQQ
++
Feedforward Control
41
Feedforward Feedforward ControlControl
Feedforward Feedforward control is used to remove the effect ofcontrol is used to remove the effect ofmeasurable disturbancesmeasurable disturbances
A PCff
MDisturbance
NominalInput
CorrectedInput
++
InputCorrection
42
Control NomenclatureControl Nomenclature
Identification of all process variables
Inputs (affect process)Outputs (result of process)
Inputs
Disturbance variablesVariables affecting process that are due to external forces
Manipulated variablesThings that we can directly affect
43
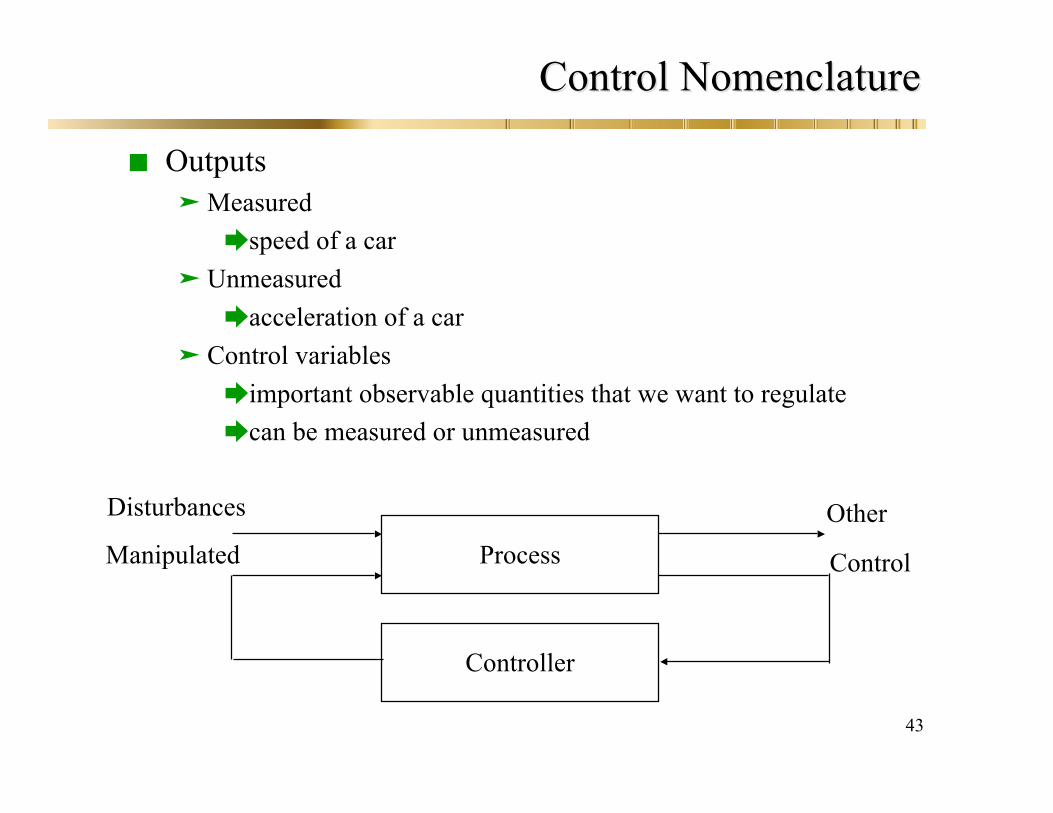
Control NomenclatureControl Nomenclature
OutputsMeasured
speed of a carUnmeasured
acceleration of a car Control variables
important observable quantities that we want to regulatecan be measured or unmeasured
Controller
Manipulated
Disturbances
Process Control
Other
44
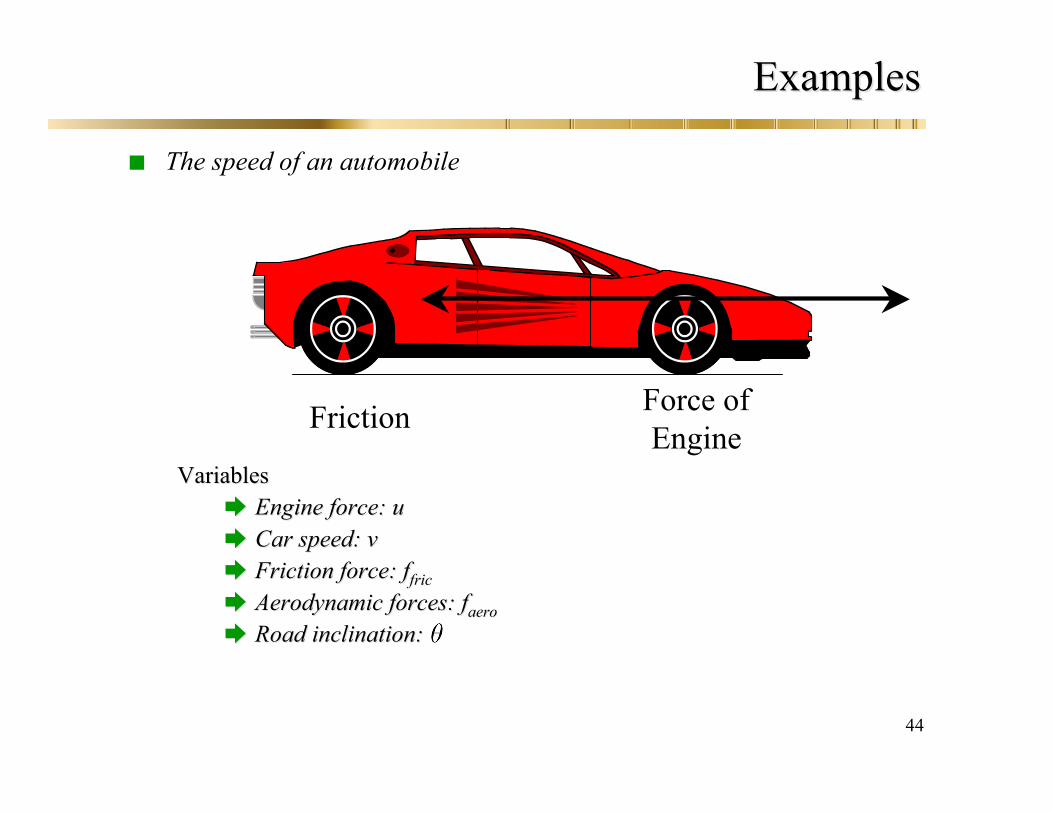
ExamplesExamples
The speed of an automobile
VariablesVariables Engine force: uEngine force: u Car speed: vCar speed: v Friction force: Friction force: fffricfric Aerodynamic forces: Aerodynamic forces: ffaeroaero Road inclination:Road inclination:
Force ofEngineFriction
45
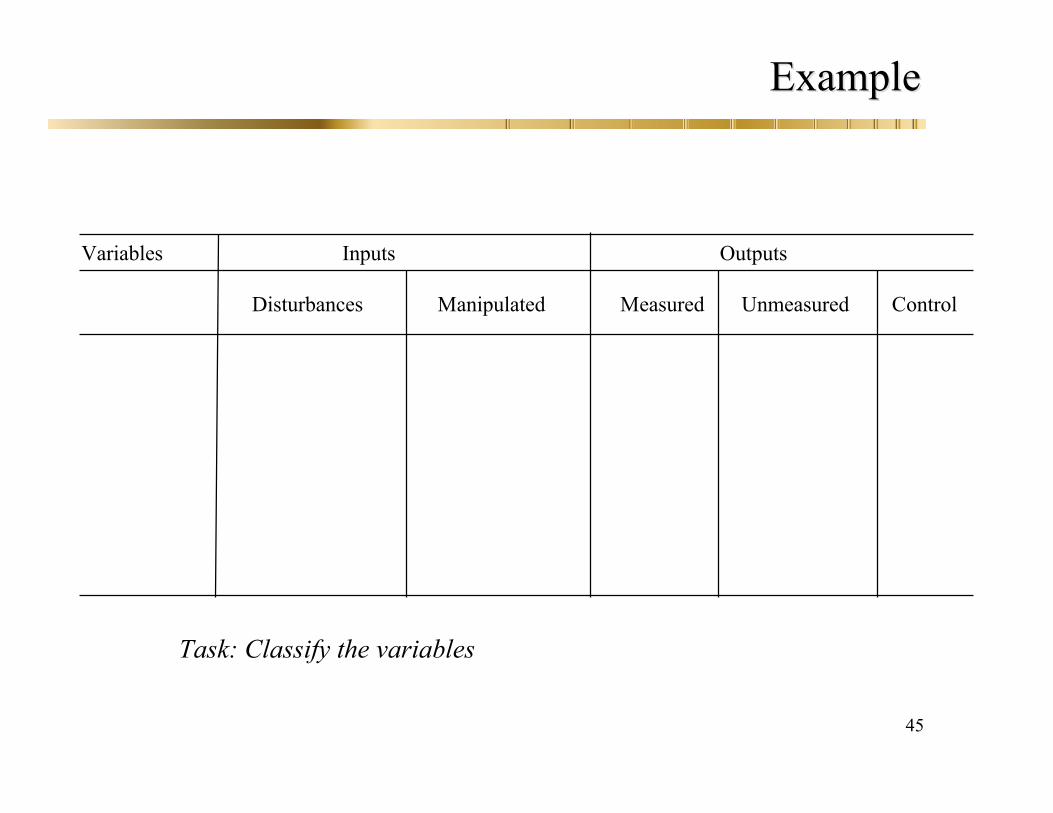
ExampleExample
Variables Inputs Outputs
Disturbances Manipulated Measured Unmeasured Control
Task: Classify the variables
46
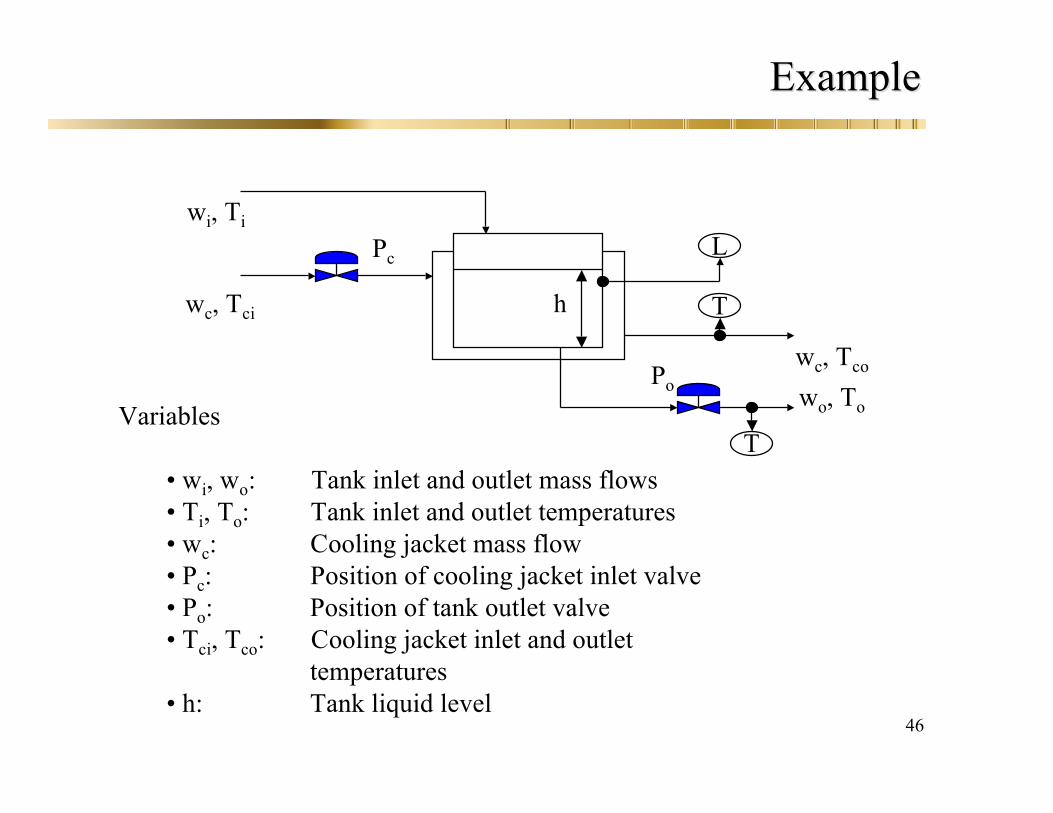
ExampleExample
T
L
T
wi, Ti
wc, Tci
wc, Tco
wo, To
h
Variables
• wi, wo: Tank inlet and outlet mass flows• Ti, To: Tank inlet and outlet temperatures• wc: Cooling jacket mass flow• Pc: Position of cooling jacket inlet valve• Po: Position of tank outlet valve• Tci, Tco: Cooling jacket inlet and outlet
temperatures• h: Tank liquid level
Po
Pc
47
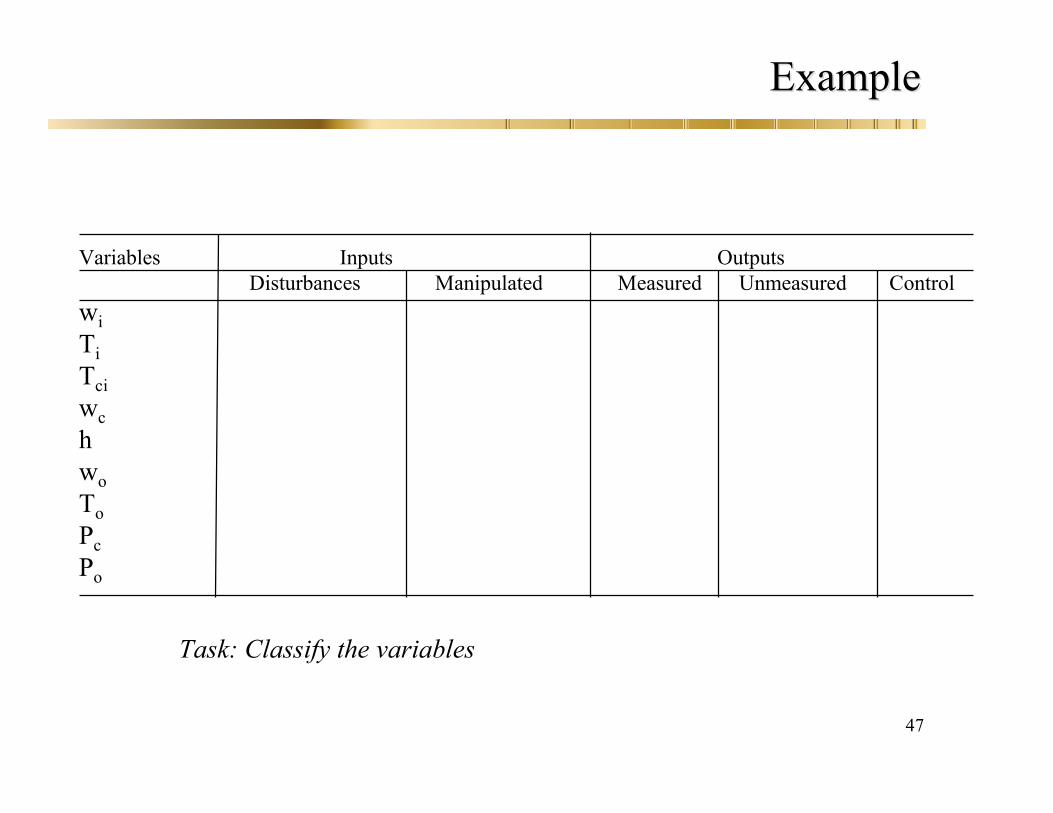
ExampleExample
Variables Inputs Outputs Disturbances Manipulated Measured Unmeasured Control
wiTiTciwchwoToPcPo
Task: Classify the variables
48
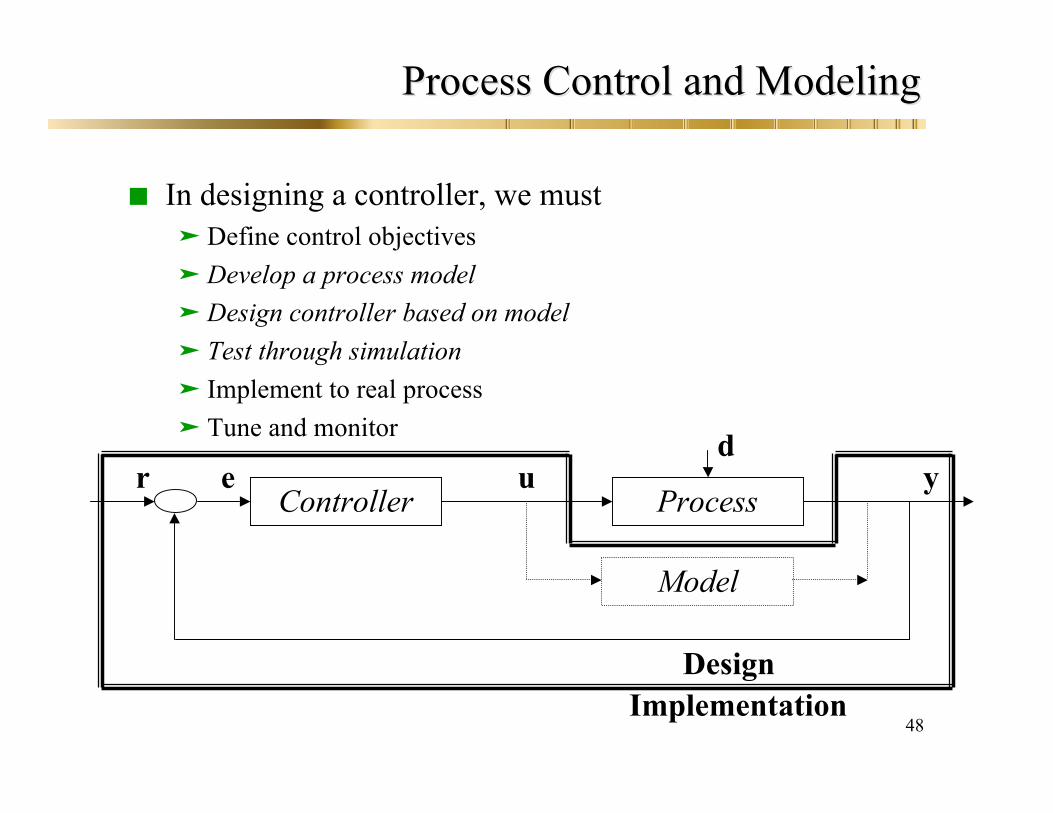
Process Control and ModelingProcess Control and Modeling
In designing a controller, we mustDefine control objectivesDevelop a process modelDesign controller based on model Test through simulation Implement to real process Tune and monitor
Model
Controlleryur e
d
Process
DesignImplementation
49
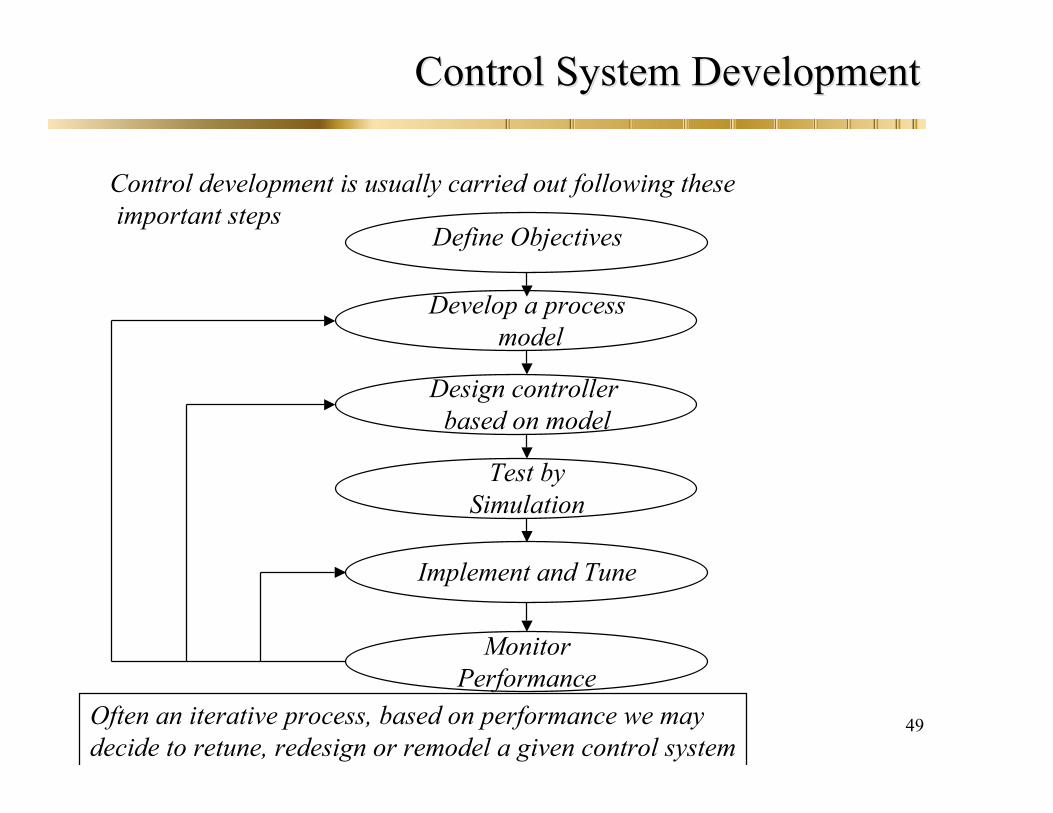
Control System DevelopmentControl System Development
Define Objectives
Develop a process model
Design controller based on model
Test bySimulation
Implement and Tune
MonitorPerformance
Control development is usually carried out following these important steps
Often an iterative process, based on performance we may decide to retune, redesign or remodel a given control system
50
Control System DevelopmentControl System Development
Objectives “What are we trying to control?”
Process modeling “What do we need?”
Mechanistic and/or empirical
Controller design “How do we use the knowledge of process behavior to reach our process
control objectives?” What variables should we measure? What variables should we control? What are the best manipulated variables? What is the best controller structure?
51
Control System DevelopmentControl System Development
Implement and tune the controlled process Test by simulation incorporate control strategy to the process hardware theory rarely transcends to reality tune and re-tune
Monitor performance periodic retuning and redesign is often necessary based on
sensitivity of process or market demands statistical methods can be used to monitor performance
Recommended

















