2-1
Chapter 2 Kinematics
2.1 Introduction
2.2 Degree of Freedom
2.2.1 DOF of a rigid body
In order to control and guide the mechanisms to move as we desired, we need to set proper
constraints. In order to set proper constraints, we need to study degree of freedom (DOF). In
mechanics, it means how many independent motions a mechanism can possibly achieve. For
a particle point, its DOF is 2 in 2D plane or 3 in 3D space without any constraint. In other
words, a point can freely move at X and Y directions in a plane and X, Y and Z in a space. For a
rigid body, since it comes with dimension (size and shape), it can rotate about certain axes.
In planar motion, there is only one direction it can rotate. That is Z direction, or the direction
that is perpendicular to the plane. Therefore, an unconstrained rigid body can have 3DOF in
planar motion. When we put the rigid body in space, it will not only be able to move out of
the plane, i.e., gain the translation at the Z direction, it will be able to rotate out from the
plane, or possible to rotate about X and Y axes. Please note that since we did not specify any
coordinate system at this point, these X, Y and Z axes are not necessary perpendicular to
each other. As long as they are independent at the local point where the rigid body is
residing, we can always observe 3 or 6 independent motions of a rigid body depending
whether it is 2D or 3D.
O X
Y
Z
2D Plane
X
Y
Z
Rx
Rz
Ry
3D space

2-2
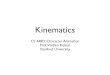
Figure 2-1: (Left) An unrestricted planar body can move at X and Y directions and rotate at Z
direction in a plane. The degree of freedom is 3. (Right) An unrestricted special body can move and
rotate at X, Y and Z directions. The degree of freedom is 6. You can get a more intuitive observation of
the degree of freedom from this interactive animation (add a link here). Select among 2D & 3D,
rotation, translation, or both.
For a rigid body in planar motion, since there are three possible independent motions, we
need to use three independent variables to identify them. We then define the two linear
translations and the one rotation as ̇ ̇ ̇ , where we implied a Cartesian coordinate
system here. As the motions are simply time derivative of the positions, their corresponding
position variables are . However, we note that there is some confusion with the
coordinate variables.
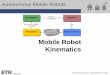
Let us look at the bicycle wheel of Figure 2-2. For the rotation, when the wheel is turning,
every single point will be turning at the same angular velocity. So we do not need to
differentiate any specific point. However, that is not the case for the linear velocities. As we
know from the Dynamics, when a wheel is rotating about its axis, even at a constant angular
velocity, the velocities of any two points in the rigid body will be different. For example, two
points A and C on the rim will have same speeds or magnitudes since they have same radii
about the rotating center O. Meanwhile, points A and B will have same direction since they
are along the same radial line. However, no two points will have same magnitudes and same
directions. Therefore, we need to specify which point we are representing using subscripts
on the linear velocity. Generally, we choose either the center of mass or the rotating center in
mechanics, say point O. Then we can describe the motion of the rigid body as
where a subscript is used to denote the point. For any other point, we can easily obtain its
linear velocity as long as we can find its relative position.

2-3
Figure 2-2: A rotating wheel.
Likewise, if we want to specify the pose (position and orientation) of a rigid body, we just
need to specify the coordinate of one point and a direction. The direction can be obtained by
measuring the angular displacement of a line that is fixed to the rigid body or simply by
getting the coordinates of another point. Unsurprisingly, these two methods are
essentially equivalent with some help of mathematics.
For example, if we know the coordinates of two points and . Then we can
choose any one as our base point, say A, and calculate the angle as:
(2-1)
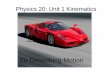
However, there is a small problem with this equation. For example, look at Figure 2-3, point
A and point B are in opposite quadrant, but their tangent values of the corresponding angles
are the same. That is
(2-2)
VA
C
A
B
VB
VC
O

2-4
Figure 2-3: Points A and B will have same tangent values.
Therefore, the direct inverse tangent will not yield a
unique answer between 0 and . Further, when ,
Eq. (2-1) will not yield any result. Therefore, we will
introduce the four-quadrant inverse tangent, , such
as
{
2.2.2 DOF of linked rigid bodies
For a free floating rigid body with planar motion, its degree of freedom is 3. If we have
multiple, say N, independent free floating rigid bodies, the total DOF will be 3N since the
movements of them are completely independent from each other. This scenario might be
true in the computer arcade games. However, it is rarely true in the engineering. Indeed, we
can consider these independent rigid bodies as the parts of a mechanism. One purpose of
mechanical synthesis or mechanical design is to find ways to connect these N free floating
machine parts in a proper way so we will strip certain DOFs away with constraints (joints)
and force the parts to move with right motions at right timings.
X
Y
A(XA, YA)
B(-XB, -YB)
𝛼
O
𝛽 𝛼 𝜋
This function exists in most
math software or
programing language. For
example, in Matlab or
Octave, the is 𝜃
𝑎𝑡𝑎𝑛 𝑦 𝑥 . So does Java
and C++. However, if you
use a calculator or a
spreadsheet (such as MS
Excel) to do the calculation,
the function is more likely
to be 𝜃 𝑎𝑡𝑎𝑛 𝑥 𝑦 . You
can blame the engineers
who designed the software
for the inconsistency, but
make sure you read the
manual and type the
argument in the right
order.

2-5
Ground
Let's start from a fundamental yet often ignored case. That is, we fix one rigid body to the
ground. In machinery, it is the case of bolting the engine to the chassis of the automotive or
fixing the base of a robotic welder to the shop floor. In both cases, what we are trying to do is
to find a ground, or reference, where the user or observer can easily conduct analysis or
where the power source is initiated. The ground is not necessarily the earth ground, though
it is often the case. Depending what we are analysis, it can be the flying space shuttle when
we are studying the robotic arm or the casing when we are studying a mechanical watch.
Mathematically, the ground is the inertial coordinate system that we will take as the
reference.
Figure 2-4: (A) and (B): Two common illustrations of the
ground. (C) The coordinate system is fixed to the ground. (D)
The joint is fixed to the ground.
When a link is fixed to the ground, it will not move.
Therefore, all of its DOFs will be lost. Or the link itself
becomes part of the ground. This link is often called
ground link. In many cases, since the ground link is not
differentiated from ground, we will just skip it in the
drawings and use a ground symbol to denote it. On the
other hand, just like the earth is a continuous body, the ground is by default connected and
hence one single rigid body. Likewise, a machine or a mechanism can be bolted or linked to
the casing or base at multiple points, but the casing or base is one big ground. Although we
may not link the ground points in the schematic drawings, they are implied to be rigidly
connected and are simply the points in an imaginary rigid body.
Joints
X
Y
(A)
(B) (C) (D)
In SolidWorks™, the first part
to put into the assembly
drawing canvas is set as
“fixed” by default. It means
that the part is fixed to the
ground. You can right click it
and make it float, which
means retrieving all the
6DOF back to the part.

2-6
Pin Joint
One of the most common joints between two links is a pin joint. A pin joint can be a pin, a
bolt, or a shaft. Physically, two links will share a common axis to rotate about.
A flash figure of two free
floating links
A pin joint
2 links with a pin joint
L2 is independent from L1.
Total #DOF=2N=6
When L2 is “pinned” to L1, it
can still rotate about the pin
joint, but it loses the freedom of
moving X and Y direction
without dragging L1 or break the
joint. Hence, 2 degrees of
freedom is lost due to the pin
joint. The total #DOF=#DOF for 2
free bodies -#DOF eliminated by
the joint = .

2-7
Figure 2-5: 3 links and 2 joints here where the 2 joints are different.
Figure 2-6: 3 links and 2 joints here where the 2 joints are same and on a single shaft.
In the design of articulate robotic arm, many links are connected by pin joints. Each added
link will add one DOF by adding 3DOF for an added rigid body and simultaneously removing
2DOF by attaching the new link with a pin joint. For the open link design in the articulated
robotic arm, in order to control and guide the motion of this added arm, we need to
introduce a power and control source, generally a micro-processor controlled servo.
However, for the most machines, we don't have this luxury. We often obtain the
controllability by using closed loop designs, which we will discuss in detail later in the
course.
Figure 2-7: Open loop links. (Obtain permission or draw with SolidWorks.)

2-8
Slider Joint
When an object is sliding along the surface of the other one, like the train running on the
track, it loses the ability to rotate relative to the body it is sliding on. It also cannot move
away from the track. Like a pin joint, the slider will also remove 2DOF from the second
object.
Figure 2-8: Examples of slider joints.
Both the pin joint and the slider joint mentioned above will remove 2 DOF when they are
used to connect two joints. We call them full joints and denote them as .
Half Joints
There is another kind of slider joints like the one shown in Figure
Figure 2-9: 2DOF slider joints.
Figure 2-10: Comparing two folding chair designs with half slider joints and pin joints.

2-9
Sometime, we can transform a half joint to two full joints. For example, the slider joint in
Figure [fig:A-2DOF-slider]A can be considered as equivalent to the pin and slider in Figure
[fig:A-2DOF-slider]B. It is also a common practice in engineering to do so.
Figure 2-11: A half joint can be replaced by one link and two full joints.
For mechanisms with both full joints and half joints, we can calculate the overall DOF of a
planar mechanism as
where N is the total number of links including the ground link, is the number of full joints,
and is the number of half joints.
Example 5. A three bar link as shown in Figure . There are 3 links counting the ground link
and 3 pin joints, which are full joints. The total DOF is
.
Figure 2-12: A 3-bar linkage has 0DOF.
It means that although we use free spinning joints to connect three links, the overall
mechanism will behave like a rigid body. Although it is not very desirable to achieve motion,
O B
A
X
Y

2-10
it is widely used to achieve structure. In civil engineering, this triangular structure is called
truss and are widely used in building high rises and bridges. In mechanical design, this
structure is also broadly adopted to save space, material and cost and to make assembly
easier.
Figure 2-13: Truss is a typical construction structure.
Example 6. A four bar link as shown in Figure 2-14. There are four links including the ground
link and 4 pin joints. The total DOF is
Figure 2-14: A four bar linkage has 1DOF.
The 1DOF of a four bar link means the one to one correspondence between input and output.
That is, as long as we can control the configuration and motion of one point, generally the
rotational angle or angular velocity of a link about one joint, the configuration and motion of
the entire linkage will be determined. This predictability makes the four-bar link very
suitable for many engineering and industrial applications. It is unarguably one of the most
widely used basic linkages used in the industry.
A
C
B
X
Y
O

2-11
Example 7. A crank-slider mechanism as shown inFigure 2-15. There are four links including
the ground link, 3 pin joints and one full sliding joint. The total DOF is
Figure 2-15: A crank slider has 1DOF.
Like the four bar links, cranker-slider is widely used in the industry thanks to its 1DOF or
one-to-one correspondence between input and output. For example, in an internal
combustion engine, this mechanism is used to convert the linear motion of the piston to the
rotation of the crankshaft. Meanwhile, in an air compressor, the motion is traveled the
opposite way from the rotational motion of a link connected to an electric motor output shaft
to the linear motion of the piston in the compressing chamber.
Example 8. A V-2 engine. There are 6 links, 5 pin joints, and 2 full sliding joints. The total
DOF is
(Add a V2 engine figure here. ) Add a V6 engine simulation here.
From this example, we can see that it is achievable to obtain a coordinated motion from a
slightly complicated linkage design. If we stack 3 or 4 such V2 engine along a common shaft,
and adjust each pair so they will reach the limit positions sequentially with predetermined
interval, then we have our schematic design of a V6 or V8 engine used in many performance
motor vehicles.
2.3 Grashof Mechanism
A C
B
X
Y
α β

2-12
2.3.1 Grashof condition
Let us compare the following four mechanisms:
Insert a Crank Rocker figure with a
link to simulation video
Rocker crank
Insert a double Crank figure with a
link to simulation video
couple Rocker
We notice that some links will rock back and forth, while some will just rotate continuously.
However, how do we know that which one will rock and which one will rotate? Someone may
just cut the length by chance and let the luck fly, but as a trained engineer, we cannot live by
chance. Fortunately, a German engineer named Franz Grashof helped us to solve the problem. It
is called the Grashof’s criterion for four bar links.
Given a four bar linkage, we can name each of them after their lengths:
s: length of the shortest link
l: length of the longest link
p & q: lengths of the other two links.
Theorem. Grashof’s criterion: Given a four bar linkage, it will
have at least one revolving or cranking link (usually the shortest link), if
. The link is called Grashof.
have no revolving or cranking link, if . The link is called non-Grashof.
2.3.2 Grashof Mechanism
Some definitions:
-Crank: one pin is grounded, can make full revolution about grounded pin
Rocker: one pin is grounded, does not make full revolution about grounded pin
Coupler: neither pin is grounded. Experiences complex motion
There are several common situations that we encounter with the Grashof condition.

2-13
2.3.2.1 Crank-Rocker. The shortest link s is the crank.
The shortest link s is the crank. The longest link l is grounded. The intermediate link
opposite to the shortest link is the rocker that bounces back and forth.
Figure 2-16: A crank-rocker.
2.3.2.2 Double crank.
The shortest link s is the ground link, or the frame.
Figure 2-17: A double crank.
2.3.2.3 Double rocker.
The shortest link s is opposite to the frame. It is both a coupler and a crank. Unlike the crank
in the previous examples, where the cranks rotates about a fixed joint, the crank in a double
rocker will not rotate about a fixed center. On the contrary, it will follow a combination of
rotation about its center and a complicate movement of the center.
A
C
B
X
Crank
Rocker
Y
O
A
C
B
X
Y Crank Crank
O
Franz Grashof
(7.11.1826 ~
10.26.1893), was a
professor of Applied
Mechanics at the
Technische
Hochschule
Karlsruhe. His name
also appeared in the
field of fluid
dynamics and heat
transfer with the
dimensionless
Grashof number Gr.
Coupler
s
p
q
l

2-14
Figure 2-18: A double rocker.
2.3.2.4 Special Case: S + L = P + Q
Figure 2-19: Three possible cases.
In the special case where S + L = P + Q there are three possible configurations, as shown
above. The parallelogram linkage may switch (uncontrollably!) to the anti-parallelogram
linkage if care is not taken to prevent this.
Figure 2-20: A parallelogram steering linkage.
Cranks
Coupler
Antiparallelogram FormParallelogram Form
Cranks
CrankRocker
A
C
B
X
Y
Rocker Rocker
O
Crank

2-15
A parallelogram steering linkage can be used in a steering system. The pitman arm, track rod, idler
arm, and the car frame (as ground) form a parallelogram. When the steering wheel turns the pitman
arm, it moves the two tie rods simultaneously, which in turn, push one end of the steering arm. The
steering arm will then turn the wheels.
2.3.3 The Non-Grashof Linkage If S + L > P + Q then the linkage is non-Grashof, and all permutations are double-rockers.
2.3.4 Practical Considerations
Figure 2-21: Input for a Grashof and a non-Grashof mechanism can be different.
In many practical situations we will use a motor (AC or DC) to drive the linkage. This is
simple in the case of a Grashof linkage – we attach the motor to the crank, and the linkage
can spin forever. In the non-Grashof case, we must either use a servomotor or stepper
motor, or, where we desire to use a simple AC or DC motor (if we need continuous motion),
we can attach a driver dyad as shown in the figure above.
Figure 2-22: Windshield Wiper Linkage for 1998 Ford Escort.
In the linkage shown in Figure 2-22, the wipers have rocker motion, but are driven by 12DC
motor, which runs continuously. The linkage is approximately a special-case
(parallelogram) Grashof linkage, and both blades are driven by one motor.
Motor
Driver dyad
Motor
Driver dyad

2-16
Design Projects Project 1: Folding chair.
Locate a folding chair, be it a lawn chair or a beach chair.
1. Draw a schematic diagram of the folding chair using the visualization method.
2. Identify the links and joints used in the folding chair.
3. Find the #DOF of the chair.
4. Think about 3 ways to achieve the same effect using different methods.
5. Measure the dimension of each link of the chair.
6. Draw a 3D computer model of the folding chair using a CAD software such as
SolidWorks, AutoCAD, or ProE.
7. Vary the length of some links and examine the results.
Project 2: Automobile windshield wiper.
Locate an automobile windshield wiper. A movie about the intermittent windshield
wiper was released in 2008. The title of the movie is “Flash of Genius”. Think about the
social, technical and economical benefit of this seemly simple mechanism.
1. Draw a schematic diagram of the windshield wiper using the visualization method.
2. Identify the links and joints used in the windshield wiper.
3. Find the #DOF of the linkage.
4. Research patents on various types of windshield wipers.
5. Measure the dimension of each link of the targeted windshield wiper.
6. Draw a 3D computer model of the windshield wiper using a CAD software such as
SolidWorks, AutoCAD, or ProE.
7. Generate a simulation of the windshield wiper by connecting it to an electric motor.
8. Vary the length of some links and examine the results.
Other possible projects: Casement window opening mechanism, umbrella, etc.
Recommended