
A method for eye detection based on SVD transform
Somayeh Danafar
Lila Taghavi
Alireza Tavakoli

Outline
•The advantages of algorithm
•SVD in a nutshell
•The methodology
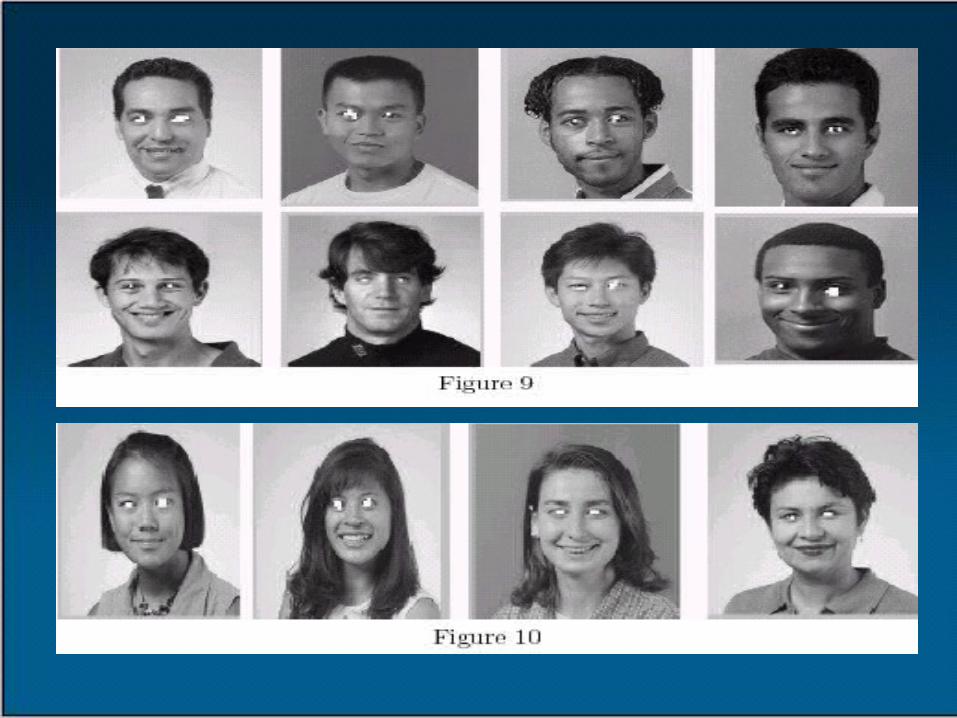
•Results from a number of images
•The result of interest points algorithm
•The algorithem’s errors

: The algorithm is robust relative to
• Changes in lighting
• Eye color and complexion
• Blurring
• Introduction of glasses
• Different resolutions
• Complex background
• Variability in scale and orientation

Singular Value Decomposition in a Nutshell
U and V are orthogonal matrices
i = i ( ATA) i=1,…,N
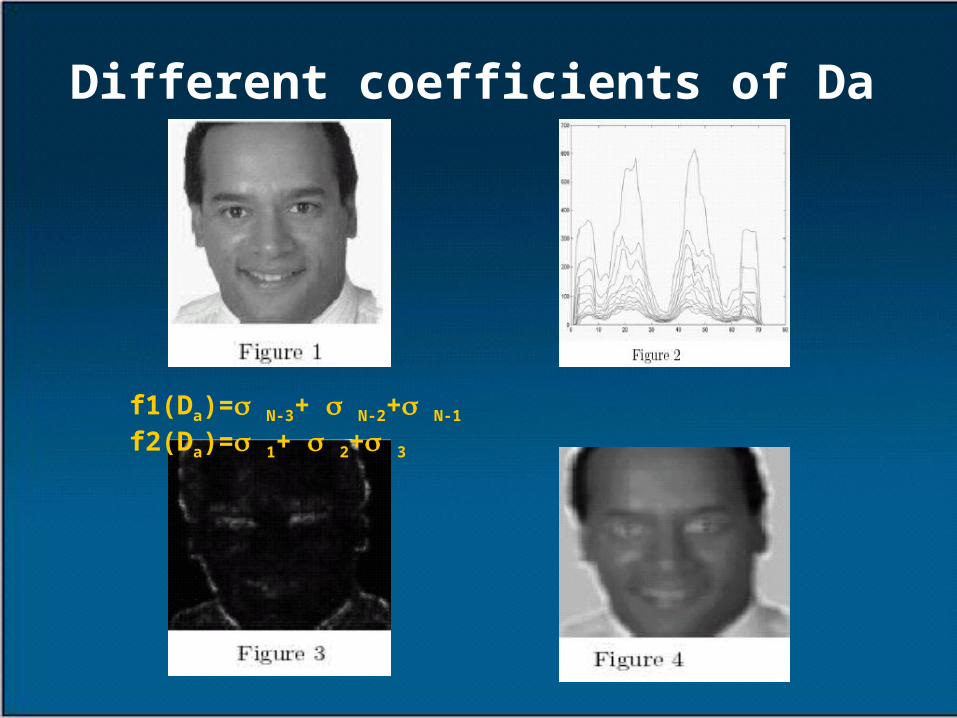
Different coefficients of Da
f1(Da)= N-3+ N-2+ N-1 f2(Da)= 1+ 2+ 3

Eye Detection
The algorithm proceeds in four steps :
1. Variance reduction
2. Application of SVD transform with a nonlinear function f
3. Application of edge detection algorithm
4. Separation of boundary edges
f= 1/(1+s(t)) for t=1,..,8

Edge Detection
f2(Da)= 1+ 2+ 3 g(Da)=f2(Da)f

Original Image
SVD transform uses the exponential of a linear function of diagonal part of the SVD decomposition.
SVD Transform in diffident coefficients of the sigma in the SVD
Using Edge Detection
Using noise removal
- =minus equal
The Methodology

The Methodology
- =
SVD Transform
Edge detection
Edge detection with noise removal


Rotate :65 ْ

Rotate: 45 ْ

Variation in lighting

Introduction of glasses
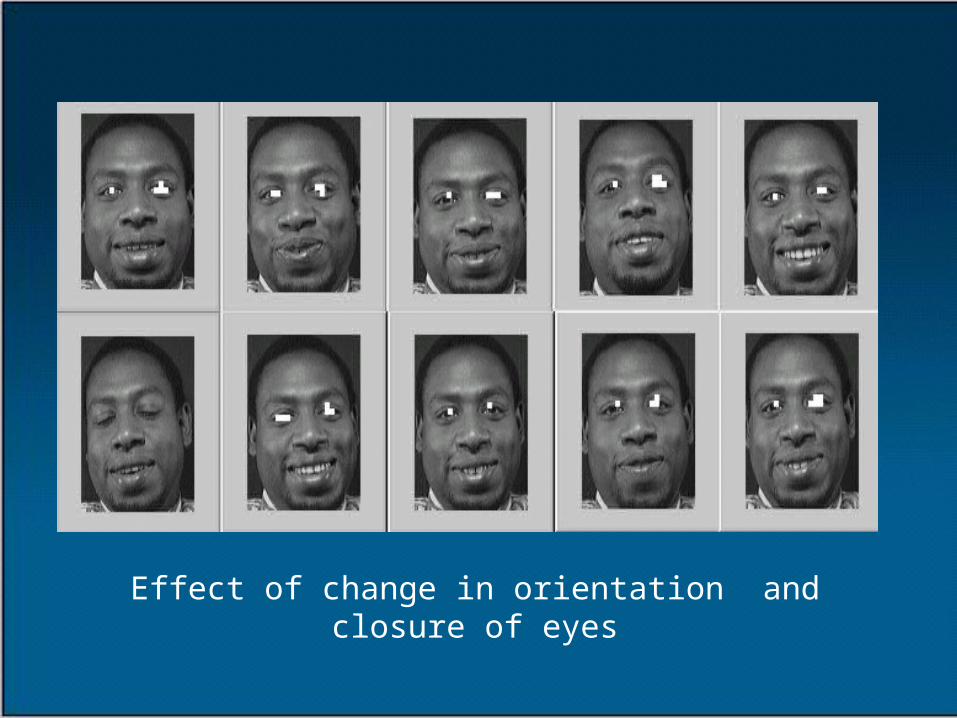
Effect of change in orientation and closure of eyes

Application to images with a complex background


The SVD transform

The SVD transforms Final result

The result of svd transform
Final result
Original image

SVD versus Interest Points algorithm
25 points
60 points
43 points
3 points
14 points
10 points
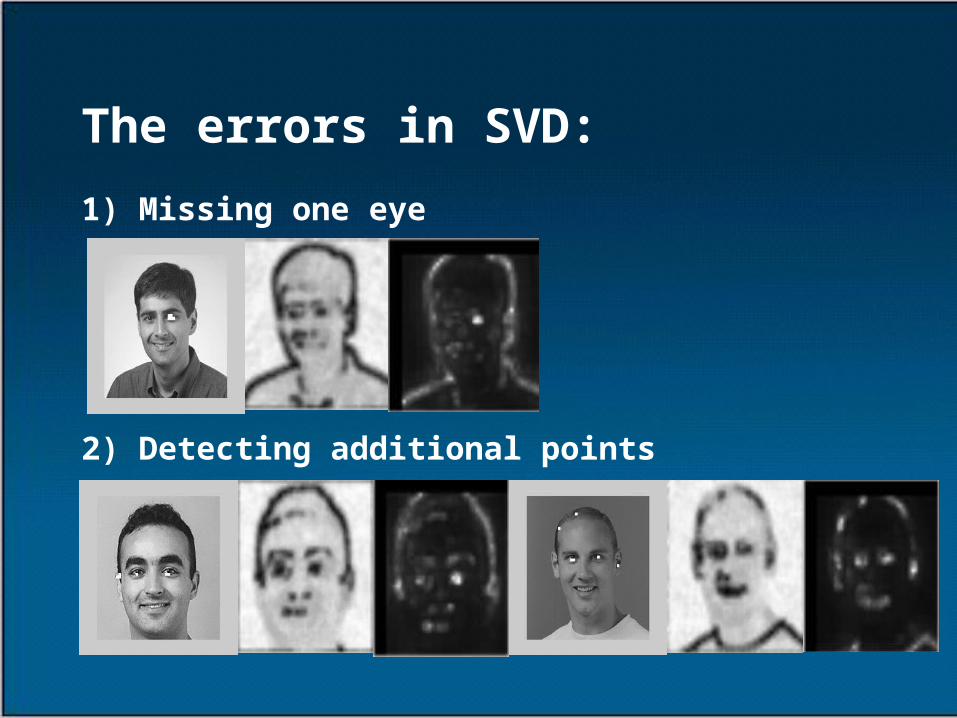
The errors in SVD:
1) Missing one eye
2) Detecting additional points
Recommended

















