Embed Size (px)
Citation preview

Workshop
Future Directions in Systems and Control Theory Thursday, June 24
Viewgraphs - Volume 3
DISTRIBUTION STATEMENT A Approved for Public Release
Distribution Unlimited
20000118 125 j £gX0QP£m USEBBCIEB 1

A Framework for Control, State Estimation, and
Verification of Hybrid Systems
Manfred Morari
Alberto Bemporad Giancarlo Ferrari-Trecate
Domenico Mignone Fabio Danilo Torrisi
Automatic Control Laboratory
Swiss Federal Institute of Technology (ETH)
Technical Reports: http://www.aut.ee.ethz.ch
IfcefcfiteoA* M<MA Zürich
MfcaJ
Premise
The discussed problems are important but
inherently difficult
All useful techniques must involve significant
off-line and/or on-line computation
Results
New System Type:
Mixed Logical Dynamical (MLD) System
Many practical problems can be represented
in MLD form
Control, estimation, and verification
require solution of Mixed-Integer Linear (or
Quadratic) Programs (MILP, MIQP) for
which efficient techniques are becoming
available
■■■■■ £Uf/*nam»hchm I

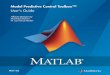
Example: Verification of an Automotive Active Leveler
System
• Controller
f>OTl f<OTh f<OTh I f>ITl f = 1 -{-as
■h
f>OTh
• For a given set of initial conditions, variation of
parameters, and road conditions:
(VP#1) Find worst performance
(VP#2) Verify that height is within desired limits
ZSrteh \

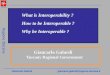
Example: Control of a
Hydroelectric Power Plant Water \Q\
reference level
Level sensor
Objective:
• Maximize power generation
Manipulated variables:
• Turbine ON / OFF
• Stepper motors (—1,0,1)
TmeMnisaif ZürMi
wehm I

Hydroelectric Power Plant
Constraints
• on actuators (flaps, gates)
• on level
Targets ( = end point constraints)
• level
• actuators (flaps, gates)
Preference hierarchy / heuristics
1. Flaps rather than gates
2. Turbine ON > Tmin
3. Stepper motor ON > Tmi
4. Transitions: turbines / flaps / gates
5. Stepper motor OFF < T„
mm
max
•Efcfp*A8»/*0*Mi Tmetmtmabm Mactu»Hi ZBrMt
IMJ

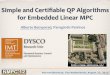
Example: Three Tank System
Nominal behaviour:
• Liquid level in tank 1 controlled by pump 1
• Liquid level in tank 3 controlled by switching
valve Vi
Faults:
01: Leak in tank 1
</>2: Valve Vi blocked closed
Maintaining nominal operating condition
requires fault detection & control
reconfiguration
BSgmit&muhehm T»chmt»ahm HoaJhmtJtm Zürich ^

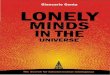
Example: Gas Supply System (Kawasaki Steel)
Joint electric 'SL, power plant
-> Process under consideration
Heavy oil >
Maintain hold-up
Maximize use of gas for combustion
Limitations on gas flows, heat produced, gas
volume in holders
Complex rules for boiler switching
HMI^V -SB OT ^H i ZBrtoh

Premise
The discussed problems are important but
inherently difficult
All useful techniques must involve significant
off-line and/or on-line computation
Results
New System Type:
Mixed Logical Dynamical (MLD) System
Many practical problems can be represented
in MLD form
Control, estimation, and verification
require solution of Mixed-Integer Linear (or
Quadratic) Programs (MILP, MIQP) for
which efficient techniques are becoming
available
■■■■■■■ M JB^mmMmmlachm I ■■I V If Ifeifcnbaft« MMhfcMhaM Mm ■ MMziirfeA I

General Class: MLD Systems
General formulation of Mixed Logical-Dynamic
(MLD) systems
x(t+l) = Ax(t) + BlU(t) + B2S(t) + B3z(t)
y(t) = Cx(i) + DlU(t) + D28(t) + D3z(t)
E2S(t) + E3z(t) < E^it) + E4x(t) + E5
State
x = xc
x£ , xc G Mnc, xt G {0, l}n*
Output :
y , Vc e M?c, yi G {0, l]Pi
Input :
u = uc , uc G Rmc, ut G {0, l}m*
Auxiliary binary variables : S G {0, l}rz
Auxiliary continuous variables : z G Wc
Zürich I

Assumptions Recall: x(jb+l) = Ax(t) + BlU(t) + B2S(t) + B3z(t)
y(t) = Cx(t) + DlU(t) + D25(t) + D3z(t)
E25(t) + E3z(t) < ElU{t) + E4x(t) + E5
Well-Posedness :
{x(t), n(t)} -* {z(t + l)} single valued
{x(t), u(t)} -> {y(t)} single valued
This allows to define trajectories in x-space
Physical Constraints :
G Rnc+mc : Fxc + Guc<H C± xc
uc
C is a bounded polyhedral set (not restrictive
in practice)
This allows to define upper and lower bounds
M, m
Note: Physical constraints are included in
the inequality
Jm g jjhj HK*»*«*« Waa*Mfc»l^ —

Propositional Calculus and
Linear Integer Programming
Truth table
Xi x2 i^> X\ X± V X2 Xt A X2 Xi —)■ X2 Xx ++ X2 F F T T
F T F T
T T F F
F T T T
F F F T
T T F T
T F F T
I ! Propositional logic •£>■ Integer linear inequalities
I6{F,T} & 6 € { 0, 1 }
xxvx2 is equivalent to 5i + 52>l
XXAX2 is equivalent to *1 +*2 > 2
<^J Xi is equivalent to <5i<0
X\ —■> X% is equivalent to Si - s2 < 0
x1<+x2 is equivalent to $! - 52 = 0

Logic Facts Involving
Continuous Variables
[fix) < 0] A X f(x)-ö<-l+m(l-ö)
[fix) < 0] V X fix) < MS
~ [fix) < o] fix) > e
[/(x)<0] -»■ X -fix) + e < (e - m)6
[/O)<0] o X \ fix) < M(l - 5) 1 fix) > e+im-e)8 \
• M, m = upper-, lower-bounds on f(x)
• e = small tolerance (e.g. machine precision)
• Xe{F, T}, xeW1, 5 G {0,1}
if f(x) linear => Mixed-Integer Linear Inequalities
MMMMMUM £M0«t*a«feefai» I Mm M Mm liHihntmatfHoallmohmld mm m MM»W«* I

Product of variables
53 = 5i52 ( -81 + S3 < 0 ) -S2 + ö3 < 0 ( 5i + 52 - 53 < 1
y = öf(x)
' y < MÖ y > mö
* V < f(x)-m(l-6) . y > /(x)-M(l-5)
M, m = upper-, lower-bounds on f(x)
e = small tolerance (e.g. machine precision)
if f(x) linear^ Mixed-Integer Linear Inequalities
■■■■■ GUgimlMh&m I
mm M M m zttrMt I

An Example
5(0
10 timer
20
System:
x(f +1)
y(t)
= 0.8
= [10]x(t)
cosa(t) -sina(t) sina(t) COSa(t) x(t) + u{t)
a(t) z
• Rewrite as x(t + l) = [I I\z(t)
' 10 " -10-e
-M -M M M M M -M -M
0 0 0 0
[1 0]x(t) > 0 -| if [1 0]x(t) < 0 - if 3 "
m +
ro 01 0 " 1 °1 "10' 0 0 0 -1 0 —e r 0 0 0 0 -i 0 0 0 0 0 i 0 0 M 0 -j 0 0 M
0 0 z(t)< [0 1]'
- [o 1/ [oir
u(*) + -Ai ®(t) + M M
0 i A2 0 0 0
-i 0 - [o 1]'
0 -A2
I 0 N
0 0 0 -I A/ 0 0 1 0 1 0 0 -1 L ° [l
The origin is globally asymptotically stable
ETH Ibehntmabm HooMtehmi Zürich •\

System Theory
for MLD Systems
Well- Posed n ess
Stability
Reachability/Controllability
Observability/Reconstructibility
Optimal Control
State Estimation

Observability Test for Autonomous MLD Systems
DEFINITION of incremental observability:
Vxlt x2 G X(0)
T-l X) ||y(*, *l) " tf(*> *2)lloo > Hl*l - a2||l t=0
GOAL : compute minimum number
of output measurements necessary to
distinguish two initial states x±9x2 G X(0)
TEST :
0. Fix wm-m as small as desired (w < tymin=practical indistinguishability)
1. Fix Tmax=maximum number of measurements (T > Tmax=practical indistinguishability)
2. T<- 1 3. MinimizeX^llyÖ^O-K^^lloo-tüminlki-^lli
4. If minimum < 0, increase T.
5. If T > Tmax, STOP (system unobservable)
6. Go to 3
Mixed-Integer Linear Program
^■■■PB S B4gmm»00h€hm I E|]WrMMiH**fb«*«MJ ■ ■■V V 0Ü Zürich I

Observability Index: Example
xi x2
■(t + 1) =
y(t) — Xl(t),
f
J
1.1 o" 0 1
xi X2
(
0 0.9 xi
{ 0.9 0 X2
iy(t^,)-y(t,yi
) if € < X!(t) < 1, €> 0
(t) otherwise
e < zi(0) < 1
rp A log | log 1.1 + 1
e T 0.9 3 0.4 11 0.1 26 0.01 50
0.001 74 0 oo
Observability index T does not depend on
state dimension n
T can be arbitrarily large (also T = oo)
Ifcofcntoo6« §§tahmoh ZVMkft H

System Theory
for MLD Systems
Well-Posed ness
Stability
Reachability/Controllability
Observability/Reconstructibility
Optimal Control
State Estimation
■■■■■f ■ iEMpamBMftwJMi I fiTM T**kHlsat>» Hoe*M*«fJ

Model Predictive Control
Reference
^ r
Optimizer 1 u(t) 1 . fe. Plant f y(t)
—►
i
Observer
X{ 't)
MODEL : a model of the plant is needed to
predict the future behaviour of the plant
PREDICTIVE : optimization is based on the
predicted future evolution of the plant
CONTROL : control complex constrained
multivariable plants
Off nwhütaaA* ttoatueh Zuriet,
i«J

Optimization Problem
future
-u 0 O P P O
Predicted outputs y(t+k\t)
. .-.■•■ ■■■:'<'■■;'. --i ■■■''■■
«SSj'SSK iSg»
Manipulated w(t+fc) Inputs
output horizon
Compute the optimal sequence of manipulated
inputs which minimizes
• tracking error = output - reference
• subject to constraints on inputs and outputs
On-line optimization => Receding Horizon
DMAHUMIA* " Zürich
«*• I MMD^MAMIJ

Receding Horizon
t+11+2 t+l+m t+l+p
• Optimize at time t (new measurements)
• Only apply the first optimal move u(t)
• Repeat the whole optimization at time t+1
Advantage of on-line optimization:
FEEDBACK!
mm m IIZMHW» I

Receding Horizon - Examples
Chess Game
Investment plans
4& y/fi- v** *& ^* & ■&& Y* "** ^ *** o^

Predictive Controller • On-line optimization problem (MIQP)
T-l
min J(t£-\*(t)) 4 £>(*) - tiell^ + ||S(fc|t) - S«|& ^o" } fc=0
Ve\\Q5
subj. to <
X(T\t) = Xe
xQz + l\t) = Ax(k\t) + B!v(k)+
B25(k\t) + B3z(k\t)
y(k\t) = Cx(k\t) + D!v(k) + D25(k\t) + D3z(k\t)
E25(k\i) + E3z(k\t) < ElV(k) + EAx(h\t) + E5
According to a receding horizon philosophy,
set u(t) = t£(0)
Repeat everything at time t + 1
Feasibility of MIQP ©t = 0 => closed-loop
stability
Global optimum not needed !
M<HIAMA«J

Closed-Loop Example jc-space y(t),r(t)
0.5
*2 0
■OS
-i o^ •
j y^NJ/.v __j
-1 -.y^ I -*^<^1 — ^.
0.2
0
■02.
-0.4
-0.6
-0.8
-1
-0.5 05
*1
u(t)
. U» I j — i • »-
.1 J_J__i_J_-l-i f--l- f ^ I
1 I I'll1 f'l I ' I -4—i—r~*" i—Vr ~ 7—A—i r i—
\ /* I1/ \'i ' \ f'l 111 1 1/ _Jki__JL I \ J ' 1 j
' 'l - ' ■'. ^ .'.'•'■'•! -v.
0 20 40 60 80 100 120
timer
0.5
-0.5
1.5
1
05
0
-05
0 20 40 60 80 100 120
time/
5(0
, , , , ,
- in i ■ 1- —■ i ' |i i,.——m
1 1 1 1- (
0 20 40 60 80 100 120
timer
x{t +1)
y(t)
= 0.8
«(*) =
cosa(t) — sina(t) sin a(t) cosa(t)
[1 0]x(t) § if [1 0]x(t) > 0
-§ if [1 0]a;(t) < 0
*(«) + «(*)

Computational Aspects
The on-line optimization problem is a
Mixed-Integer Quadratic Program (MIQP)
No need to reach global optimum (see proof
of the theorem)
Available methods: Generalized Benders'
Decom position, Outer Approxi mation,
LP/QP based branch and bound, and
Branch and Bound.
Branch & Bound is the most effective
General purpose B&B MIQP solvers
available, for both dense and sparse
problems (e.g. Fletcher-Leyffer's)
gam g Jff TxJwtooO« Ho*h»chutJ{

System Theory
for MLD Systems
We 11-Posed n ess
Stability
Reachability/Controllability
Observability/Reconstructibility
Optimal Control
State Estimation
Tmehntmahm Hoahtohukl ZürMt I

Fault Detection and State Estimation
for Hybrid Systems
• Use Moving Horizon Estimation for MLD
Systems (dual of MPC)
• Mixed logic dynamic fault (MLDF) form
(Bemporad, Mignone, Morari, 1998):
x(t + 1) =Ax(t) + BlU(t) + B2S(t) + B3z(t)
+ B6ct>(t) + m y(t) =Cx(t) + DlU(t) + D2S(t) + Dzz(t) +
+ D6<j>{t) + C« E2S(t) + E3z(t) < ElU(t) + E4x(t) +E5 + E6<f>(t)
Faults: <j>(t) e {0,1}^
Disturbances: £(t) e Rn, C(t) e Rp
• At each time t the estimates </>(t), x(t) are obtained by minimizing an MIQP over a horizon extending backwards in time
0
Y, HfKfc|t)-v(fc)l& + *'(c(*l*)>W).
5(fc|t),£(fc|i),$(fc|t),2(fc|t))
k=t-T+\
Zürich HMAHMJ

Three Tank System: Fault Detection - I
0.6
0.5
0.4
^" 0.2
0.1
0
-0.1
0.1
1-0.1
(D
-0.3
-0.4
measured output y{t)
, 1 1
i 1 1
0.6 estimated output y(tlt-k)
0.4
8 0.2
20 40 60 time
state estimation error
80
I Y . iW l^.t ( -Jr
i_ _-/C 1 '
i i '
-0.2
1
0.8
J).6
*0.4
0.2
0
I i 1
■ 1 1
20 40 60 time
The estimated fault ${t-1 It)
20 40 time
60 80 20 40 time
60
</>]_: leak in tank 1 at time t = 38
80
\ »
l i 1
I I l
I I ■ I I I
j i i
80
JtMQmmBmthehm TtrcSnt»ahm Turk*
tehrn J fMAMMmMMJ

Three Tank System: Fault Detection - II
measured output estimated output
100
state estimation error 0.3
02
0.1
1-0-1 ,
-02
-0.3
-0.4
I I I I
I I I I
*< I 1 1 1 1
-r\ r—i i / i i i i
J L L J ' i t i i
i i i i 20 40 60
time 80 100
20 40 60 80 100 The estimated fault ^ (t-1 It)
1
1 I
i The estimated fault ♦2<t—11t)
80
■--
T 1 1 1 1 1
—1 1 i 1 I 1
1 1 I
I I
1 i 1
20 40 time
60 80
fa: leak in tank 1 for 20s < t < 60s
fa: valve V\ blocked for t > 40s

Three Tank System: Fault Detection - III
measured output estimated output
20 40 60 80 100 time
state estimation error
40 60 80 100 time
20 40 60 80 100
Estimated fault <>-, (t—11t)
«s- ~|- i i
—I 0 Estimated fault 4>2(t-1lt) 80
0! leak in tank 1 for 20s < t < 60s
</>2 valve Vi blocked for t > 40s
+ logic constraint [hi < hv] => <j>2 — 0
gam g gag iwfanwti «oo*««^
Research Program
Modeling Language and Compiler
— Express models and specs with "standard vocabulary
— Translate into MILP/MIQP
Verification/Controllability/Reachability
— Use tools from Polyhedral Computation
— New case studies
State Estimation/Fault detection
— Dual of Model Predictive Control
— Convergence properties of estimator
Optimization Algorithms
— Sparse QP solver
— New Branch-and-Bound strategies
Model Reduction/Approximation
**m I NacJwehutJ ;
n Jf ■■ HaaFinL^
ZSrMi

HYSDEL (HYbrid Systems DEscription Language)
Describe Hybrid Systems in a compact way
— Propositional Logic
— Dynamics
— Constraints
Automatically generate MLD models
MLD model is not unique in terms of the
number of auxiliary variables => optimize
model: # binary variables = min.!
Reduction of model complexity for models
containing purely logic relations
(Truth Tables => Convex Hull)
KB m tfV 28rfeA I

HYSDEL Example
Automotive Active Leveler X Description of Tariables and constants
state f,h,xll,zl2; input d,dc,dev;
const OTh, 0T1, ITh, IT1; const Ml,H2in3,H4Imi,m2,n3,n4; const e; const T8,cbar,eTbar,eats,cmax>cmin,eTmazIe'vnin;
X Variable tjpea
real f ,h,zl.z2,z3,d,dc.dev; logic dl.d2.d3.d4.d5,d6,d7,d8.d9,dl0.dll.di2.dl3.di4;
X Relations
dl = -Cf-ITh. <= 0. Hi, «d, e>; d2 = {f-m <= 0, M2, «2, e}-; d3 = ti-OTh >= 0, M3, «3, e>: d4 = Cf-0T1 >= 0, H4, »4, e>;
d5 - "ill fc d3; X Should be accepted also: d5-(l-xll)kd3, d5=(l-ili)*d3 dg = ill ft "dl; d7 - zl2 ft d2; d8 - "rl2 ft "d4; d9 - d5 I d6; dlO • d7 I d8; dll - "ill ft xl2; dl2 = ill ft -il2; dl3 = Td9 ft 'dlO ft di4); di4 = xli | xl2;
zi = dll * (cbar + dc) {cnax,cniii,e>; z2 = dl2 * (evbax -I- der) {eTmax,tnniiLn.,B}; z3 = (eats » f + <1 - eats) » h)*dl3 {10*0111,10*0Tl,e};
X Other constraints
must ill + xl2 <= 1; Bust ~(d9 fc dlO); aust ""(dll ft dl2);
X update
update f = z3; update n = h + Ts * (d + zl + z2); update ill = d9; update zl2 = dlO;
Zflrfa* Mo*fcM*«M

General Transformation of Truth Tables
into Linear Integer Inequalities
T:
XI x2 a • • xn— 1 Xn - = F(xi,.. • ? xn—l)
0 0 0 1 0 0 1 0
a a a
a a
a a a
1 1 1 1
A5<£, i G {0, If
Theorem:
T/?e polytope P = {5 : AS < B} is the convex
hull of the rows of the truth table T
P = conv(T)
(Bemporad and Mignone) □
Every logic proposition can be translated into
linear integer inequalities
araMtnllNMCMlV
Zürtoh
aekrn I

/-*"
Truth Tables => Linear Integer Inequalities
Example: "AND"
fa fa fa
0 0 0 0 1 0 1 0 0 1 1 1
(1,1,1)
*;>(u,o)
- 8i (0,0,0) (1,0,0)
conv([8MäM°M}]) = -fa + fa < o
S : -fa + fa < 0 fa -f- fa — fa < 1
Algorithm to compute convex hull: lrs (David Avis, McGill Univ.) ftp://mutt.cs.mcgill.cs/pub/c
Other algorithms: qhull, chD, Hull, Porto, cdd.
Tk*hnlmai>m Hoahi ZBrMt
MA«J

Research Program
Modeling Language and Compiler
— Express models and specs with "standard" vocabulary
— Translate into MILP/MIQP
Verification/Controllability/Reachability
— Use tools from Polyhedral Computation
— New case studies
State Estimation/Fault detection
— Dual of Model Predictive Control
— Convergence properties of estimator
Optimization Algorithms
— Sparse QP solver
— New Branch-and-Bound strategies
Model Reduction/Approximation
.1 Zurich

Formal Verification of Hybrid Systems
• MLD Model:
x(t + l) = Ax(t) + B!w(f) + B25(t) + B3z(t) y(t) = Cx(t) + Dtw(t) + D2S(t) + D3z(t)
E25(t) + E3z(t) < E!w(t) + E4x(t) + E5
• Verification Problem VP #1: Find max range for y(t) vt > o , w(t) e w , x(o) e x(o)
• Verification Problem VP #2: Vw e W and Vz(0) e X(0) verify that x(t) e Xs (set of safe states)
• Simple solution (VP #1): Solve VT > 0
max y(T) = Cx(T) + DlW(T) + D26(T) + D3z(T)
{x(o) e x(o) w{t) e W, 0<t<T
x(t + l) = Ax(t) + BlW(t) + B25(t) + B3z{t) E2S(t) + E3z{t) < ElU(t) + E4x(t) + E5
Similarly for VP #2: feasibility test with x(T) g Xs
IMPRACTICAL ! (even for polyhedral sets W, Xs, X(0), because of integer constraints)
Zürich
$mkm J

Verification Algorithm RMK: when S(t) = const , system behaves linearly.
IDEA: hypothetically partition Rn< = UÜiG (N < 2r0 where xc(t) e C% <=> 6(t) = Si
tion Ak ̂ orith m:
—>
i tr
t=
=4^
~'5r
t=3. th t=2/ { x)
t=l/[-
d= «]
t=0 \
I8S H?] " LI J
6= 111 H!l
max{u;(fc)^(fc)}t=o)a,c(o)j<5(t)} [ ^t) ]
subj. to <
x(k + 1) = Az(fc) + jBiiü(fc) + B2S(k) + J33s(fc) £2<SO0 + E3z(k) < Exwik) + £4a;(fc) + E5
w(k) eW, fc = 0,... ,t 6(k)=6i9 fc = 0,.-. ,t —1, <5(t)G{0,l}'
[ z(0) G Af(0) T/
Reachable set implicitly defined by linear inequalities (Hp: W, #(0), #s polytopes)

Example: Verification of an Automotive Active Leveler
System
Controller
f<on
f<ITl
ggs&ggHHft
f>OTl f<OTh f<OTh / f>ITl f 1 + as
■h
f>ITh f>OTh
• For a given set of initial conditions, variation of
parameters, and road conditions:
(VP#1) Find worst performance
(VP#2) Verify that height is within desired limits
mßM m Al T*oht*(maha MOOAHABIJ '— —— mm m n airfa* I

Verification of an Automotive Active Leveler - II
• System can be transformed into MLD form
Continuous states 2 Logic states 2 Disturbance inputs 3 Boolean auxiliary variables 14 Continuous auxiliary variables 3
• Results and computational times:
-44.54 < h(t) < 25.00 4 m 25 m
Pentium II 400 MHz SPARCstation 20
(M-code)
— No use of fast iterative reach-set projection
— Use of rectangular approximation of initial sets
Using HyTech (Stauner et al., 1997):
-47 < h(i) < 27 1 62 m | SPARCstation 20 ]
Analytical solution (Elia and Brandin, 1998):
43 < h{t) < 23 by-hand
Note: exact limits in discrete-time ^ continuous-time

Research Program
• Modeling Language and Compiler
— Express models and specs with "standard" vocabulary
— Translate into MILP/MIQP
• Verification/Controllability/Reachability
— Use tools from Polyhedral Computation
— New case studies
• State Estimation/Fault detection
— Dual of Model Predictive Control
— Convergence properties of estimator
• Optimization Algorithms
— Sparse QP solver
— New Branch-and-Bound strategies
• Model Reduction/Approximation
M^mmamm BdirmiiSfiMjiM \

Branch &i Bound for Optimal Control
(and Fault Detection) of Hybrid Systems (A.Bemporad, D. Mignone, M.Morari)
Key Idea:
1. Optimal sequences { 5(0), 5(1), ... , 5(T) }
have FEW switches
example: [S(t) = 1] <+ [x(t) > 0]
2. Order the sequences by number of switches:
0000, 1111; 0001, 0011; 0010, 0110; ...
mm m II. Zürich MklM

Branch & Bound for Hybrid Systems
5(0) = o 8(0) = 1
5(1) = o 8(1) = 1
First explore combinations of 6 with
low number of switches ("outside first"
strategy)
Assumption: global optimum is reached
early =^ large subtrees are fathomed.
If not enough available computation time
look only for sequences having a number of
switches < Kmax
£Mfmng—hehm nwAnteotM ZürM,
iekm I MDOAMAWM

Three Tank System: Control -I
^x^ssaa^
Number of QPs in receding horizon control using
different tree exploring startegies
2000
& ~ 1600
O E1200
i . ~... ,-~-.-. ~ r«,-.
ddpthHrvt bnHudfli tint outside first
•ff-rxTrifr
VvV 20 time 30 40
Vmahnl+atn Moei rflrfah
fawfaiM

Three Tank System: Control -II
. -i
Trajectories using suboptimal MIQP solutions:
Limiting the number of QPs at each time step
global optimum limiting # QPs
■I» V II ZU'rfafr 1

Premise
The discussed problems are important but
inherently difficult
All useful techniques must involve significant
off-line and/or on-line computation
Results
New System Type:
Mixed Logical Dynamical (MLD) System
Many practical problems can be represented
in MLD form
Control, estimation, and verification
require solution of Mixed-Integer Linear (or
Quadratic) Programs (MILPf MIQP) for
which efficient techniques are becoming
available
JM> m KlB Tmchnhahm Naahmchulm mM K m M Zürich I

3S»l»»S»»S»5^S5«S»SK»t»»»»»S»KK!»»S»>»^»»Ä»i^»»»»S»»JS^

CM
LÜ
si o
1
c E E 2 o
u w ■E .S> 1 £ E. ° 2 g 3 = 0) O Z DC
ü
"E |
i 1 o.£
a. T; O Q- ao "3.5
o 'S £ c o"J5 a) o 3 ü
CO '55
o o a- c
Si O P
S CO CD
CD a CD Ö) (0
0 CD x: > H <
(0
I (0 c < u c (0 E I- o t: a> Q.
w E XT
o
3 o Ö
mi'iiy^'iiv&ivai'iVii'mavi MWtiSJMMMfti'&KÄlSiftSS

CO
O O CC
<o ceo Oz cc<
üo SCO <o gill
c "co
o > o a» CO
CO
CD
CD £ 4-»
■ ■ L. (0 CD
> c O (D U)
c "O ■>
O o o) a> .£ • ■■■■ 4-»
La '*-'
v .2 +* Q. £L CD
CO .= CD *- *-* JC CO o •Q CO S CD
Q, CO Q. 73 CO 0)
ö -i L co 4-» 4-» c JD o o ^ </> c — .2 "S
CD CD O CC
£ O o CD
CD
*! •I -
§ s
1 S E ^
CD ja W 73
2 CD
CD CD ■° To
E .2
CD CD
H I- I I I
w (0 >. (0 c < 0) u c CO
E i_ o t: <o CL * a
CO
E
o Ö)
i o Ö DC
■^VVSSV.V»\NN^%\VWk\\V.S^Wl\J\\JXJJJJJ5JJJ5Jjy»5JJ55J55y

KÄKSKWÄSSSWSÄ
Q. Q
c (0 Q. Q
0
£ 0 «4- t o
2> 75 £ > ■*- "U (0 <D
ctS O 0
ü 8 0
su ü
o a 0
(0 Q. 0) o
0 3
"43 N
O.E -. X n aj Q E
mum
(0
0)
(0 *-» 0)
'S 0 £ 0
w£ 0~ 5 (o 8 o
0 (0 H=
0 -E 3MM ""■ 3 (8
0 N
X
E 15
0 .2 £ O 53
■■■■ o 0
T5
ü -2 o 0 S 0
to 5
£ .2 o 0 a x 0
Q. Q
0 3tttM 0 mS
4*J <Ö ■3
«*- (/>
0 ■f-J
X tf 0
£ HVMHM
X o 0 4-1
3MM
£L E o 9"
TS £ c5 "E
MUMM
0]E (0 >
ü CO
Mi Hans
0 0 55 0
V) 0 *-* *-
0 0 j£ CD 31 CÖ
O a Im.
Q.
0
£ O
■■■■
Ü £
?| § (0
CD O
SS
Q. E Q. O
(0
"I CO c < 0) u c (0 E o t a> Q. ■ ■
E I £ 1 - i o)
O
Ö DC
AVWAA/lA^J^JJJJN^JJNJJSSJWJiJtJVJ^Sj; iWJJfttüÄJMStiKKÄSfcK

= JQ
O
o a a> (0 as
o c o "(S 3 as >
LU
^»»»>»»»»»ii»^»»»»»^^»»>»^&~»fr^3*^^*s^
O
Ö IE

CD
«8
ig
CO
UJ -I CQ O CC Q.
O H CO
cc LU
III Q
w w
(0
0) o c (0 E i_ o t <u 0. w E JC
o O)
o Ö cc

>
ü </) _l LU o
h- LU 3 0_ Qo —j DC
o O.
CC
> CD
(0 a CÖ en c 0 c
3 ■ ■■
^ c o c
CÜ a|arf ü .22 o5
a CD
3 ■ ^H *■
CD 3 CD
CD CO
(D X! 3 £ 0 0) c ö) & a^am
C ö>*£ 1 c ^ C CD o o o "5 w o
CD CD 13 t E CD
(0 ü *^
— ü
■ß § o 0 cc 3
LL CO 0 (/)
>*CC
O a)
O wl^
^ 3 ü 3 CD *3
CD -Sr S CD ^ +* co =; C CÖ -^> CD JQ E CD
Eg .2
o 2 co
Q-JE I-
0) ■\
CD ü C 0
■■M
0 Q. X 0 co
ll Q.Q. CÖ ö)
3 -n "co o ■£ .c 3 o
CO co
c o
C0
2 "35 "25 I- 73 C CO
Ü5 co (A CO co ■* w co T3 t: C CD C0 CQ
2 § 0 JE co o
■C c a> o co a
i i
(0
I (0
I s (0 E >_ o t
co I E
o DJ
|j O
| Ö £SS?:£»?S--~^??^»»:»?»»»>^-^^
CC

oo
SS
1
CO
o CO LÜ D o LU ü <
o Li- CC LÜ
o "43 </>
■■■■
3 0)
0 (0 (0
CD 73
+-» CO c C- CD (0 es CO £ E ^ ^ ■■■■ o 0 Q. o ■)«BI
O O
«■■■
0 ■Q o
O CO 3 O
O X
CD <D N
C0
Ü CD
I 2 X Q.
T5
O
o (0
o
0)
.£2 — "co <* O CO
■ WM f*M BJJHWP AH
SS "5 c ■*■* j? o CO ^
E o Ü)JC inw» *£,
««MM >^^
O 0) "O C0 <*"« (0 !>* o o *f t; 75 g Ä O <D CD CD C
Mm iuaae 'w*'
h- C0 Öl
0
■SKääXSS&SK ;MfrtSÖ6^S«»»»^Ä»ÖM^S«»^Kftä^S«^t»>»S«^^
W 75 >. 03 C < fl> O C (0 E i_ o t a> Q.
w I E
o
13 O
cc

<J>
X o o EC ILU h--l ^CQ <o lil cc cco. CO LÜ z H
UJ
O
* 3 ^ m
0 0)
a>
"55 c o Ü
o CO
CQ UJ
I I
CO
IT* MHOTK
"O C iZ
(0 c < a) o c (0 E i_ o t a. w E
O
3 O
DC IJÜHÄKMÄ5RÖXÄMKK »5»KSS«tiS»>SMia»»ft»»»»»«ft^«»S KM«SSSM«»K«««SK»^Ä«»»S»K^

LU ü <
CC
<
0)
<
cc LU
(0 Q. <D <D
»*-
(0 D) C
C
ü 52 2z
o o CO *t-
UJ o - - > C/> ^
CO 0
si: CD a o "2 T5 Z
a- a >
EUJ OUJ
OC -S2
(0 ■Q o
0 as 3 O «5 Ü
o CO 0 (1)
CD
*w CO
> >
0) % a. » E o _
I §
0
o "■3 (/>
■ MM
3 <D
<D </) (0 £ 0) CO >
(1) (1)
O)
c
3
O 5
CO ™ "
2 750 CO >5*
■■§8,2 O ö)g- 2 2 o
2 > 3-- o x = iJ o a *■ £ £0
(7)
CO
'S' 92 0
5 cc 7; ■* o ° 0) o *2 CD £ N
o o 7; ^ O Q.
u. 5
(0
I (0 c < 0) u c a E 1- o t o a. w E
Si o
I < 3 o "5
•;•;.;.;. ^.;.;.;.;. v;.;. ;. v. % j N; % «;;.;. w.;. w.;;.;.;; ;»»»K»»»»S»SS»» s-.vi;vw^JJVJ5JSNJJ^J%s\\;;JJJJ^\;s;;;\s;j;s%\%;s\

X
O
UJ < GCCÜ COO _|CC
Q. O
•K
CD
o g
Ö) — 3 C O E *- Ü2
2 o (ß Q.
zz ^ E »
a) 2 £ o
5^
•X-
« -O '-' o II V-.
OH z X! W) <n 3 O I—1
1 o ■a A ■a s? u tl r—1^
PQ II <-> Z O
1 o
o ♦
o VI
T
■X-
to o A
CM
1 ^
T
rs
-X-
cq
ex
5;;
!&»»»^»»SSRS»!8ä»»SS»»^S5^^»S>K*S^
w
(0 c < 0) u c
£ o t o a. In E
o
O
Ö

CM ü
X O
o X h-
< GQ HI < OC OQ CQO
Q°- lil UJ cc
a.
25
o > a "5>
O 0) £ n 2 2 g Q- S- CD -Q Ö) >iS
"D (/) (D « (D Z
CD 2 r" M—
1 l d<
8 J3 1; o £
CU Ä M 3 o «n X! o •a ^\ o V-l A
PQ r—i^S S^
T3 II <D
£ Ü
o
^
a. I
I 1
I (0 c < 0) o c (0 E >_ o t o a w E
}&&&&&i&S$>M&&&&&&5Q&&M&MfiM&: i£!^«»*»»»»s»K^»»afc»tt^»fr»»^
o
o Ö

:»»S»t»!»S»K«»fc»Si«KSM»ÖMtt»»S«»»*K«»KSK»M«»»»^ SSK&Kfc&ÖÄKKÖftKft&t&iiftKK&SftSKöMSKlKSKÄftKÄÄiÄ^^
W "53 >. (0 c < a> u c (0 E >_ o t 0 a. V) E
o
O
Ö

o <
cc
D LU LU
(D O
H
o
o
CO
0>
o CO
a a,
I
+
a
II
a, ^
(M
^
o ii
a
o co
O
0)
Ö CO
CD
0 -P
CD CD ,Q $H o CO
a 0
a CO • i-H
0> -P
S •i-i ^ -p CO
^ 0) > 0»
CO • F-4
• • 0> J +3 0 Ü
0 Q <l
I «3 C < o u c tc E O
o ■ •
o
3 o
0C SSJÄÄXÄtKSSÄSÜmÄiMftiSiÄlSSiXSMSÄMKi w\ww\»H^a^»s&a&aa^>a^&^i6^&™*t^s^

LO K%Ktt&tt&&K&S8&R^^
Q IU
_ £ JO
■*■ in
5< DO OQ
O
U)
o o ■Ö o CD a-
§•5 1* ^ x
£ a. ° > © ■u £ CD
£ E ^ ö) ^. ? a) o E
z «° o £2
Ö) o O
(D £ £
C3 v.
a> o c > m ® 3 £
<D C £~
^ = iS -a o 2 CQ *- C
■c°E O CD -Q O £ O
■u5a
-J .E to
II
'S
O O
(0
03 c < ffl o c CO E o 0) a. w E
o
3 O
"5 ;K»H»»HK»»»&

CD
G LU
Q <
LU OX
DC* DO h-O <
HI
E CO
O)
<u
"D V C CO CO £ „J CD
■Ö c < CO
CO (0
3 0) CD
E ©
1 *- N £ CD o "Ö N c
■■■■ CO O £
CD U)X c w
■ ■Hi CM O) o 0) cc
CO 00 o>
c t; CO CD
1-° is 11 N§ |?
"S js o o CCS
(0 (0 <D
O
©
E
o ^^ a£ Ä -
H o £ ,o CO
E"g CO CO
CD CO
CO CD
8 CD
§1 o £ ^^ IBM
£ CD
£ £ CD CO
öl ■= o
< CD a
■ ■ CD .£
o +■» ^■J ■\
CO C/> CD
CO 0) CO
CD CD £ CD Ü
o £ ■ ■■■
w
I (0 c < o u c (0 E i_ o t a> a. in E x:
o
I! < ■*->
O
INÄXKKftÄKXSSftMWKKiKSÄSMKKWiüWÄiMtÄXÄfc tt»K»»»Ma»»a»aMWKK»»aw»»»&»»^»wg»WK^

SKftft5ÄBS5S^ SÄÄBSBKSÄSÄ^
1
X
II
ü
O c (/> 3 O 0 C (0 +-* X
0 £ Q. 0 O 0) 3 0) 0
o E (0
■u (0 0
1 o o ö> c o
i
(0 "55 >» (0 c < 0) u c E >_ o t CD Q.
W £
o
3 o ö DC
K:^»;;;;»::::\^;»;;:;:?^:s^*»;;?;^;;;^sr^^MiJÄS«M*»»?KÄ>Ä

00
LL O eg coo >-<
-J LU <I
OQ
<
"t-* T3 ,Ä ^—^ 1
3 ca £ CD Q-
0) / o jgto "cS m
0
4-*
A o / A*/ oz
■§■■
E £
c HM ^"™ O 1
o ■^ 4. +3 | ^ar
J* / /L! ■— i
5Ä "25 Ü o
. (0 c I 1 rl i
o 2*5 03
4-» K
to
O \ \ V c
Posi
tion
of B
C
urre
nt P
ath
ugh
p
achi
m o 3
N
o o (0 I w c L- 3U > f
posi
tioi
^ <
(D
M 5 O x ei
gen (0
c < o o
! i i o
(/> V.
5 s +J 03 1 >- 1 * «Pi 3 n E & Ü.
0 o o I i -C "^^ i ^ 2 "cS o& o I! O
</) a OC II II f 1 s \ <
O
Ö &5>^i^ÄÄx;Ä^Ätssii^Ä»»js&iÄ^5^ÄXiiöÄWÄiÄ^t»>KfcÄKMÄ5XSÄ ■ÄÄMt&M'SÄWÄÄÄÄJKKN'KKKKKWStÄWKftlftHtiSSKfttM'iSWÄy

o>
O
<
CC >-
Q LU 111 CC o o
o
o
75 c 0 c o Q. X <D (0 (D 0) 03 O Ö
(0
0) CD
O) o 3 O
O GC
o ii
CD > O
Q. o 5 Ö)
xz E o to (D
■gc o a
_ c cc — E.2
O cc
(0 c < o u c CO E >_ o t © a. w E
1! -c
o D) < •♦-•
O
Ö DC
'StiaaaasaMtKaa^ttat^iasKS^^Ki»»^^^ iKÄÄÄSiüÄMi'i

o CVJ
3*. o
E "55
c
OS
eg "55 >
CO c as
Q.
CO "55
o
CO o s:
o o
0 G) > C
"§ % ±t CD
31
8 £
Q- >
bJO cü
CO
!H 0 ft
■4-3 (XI o Ü •P
o
>
<
bJO
en
0 ft
-P CO O Ü >>
0 <D
o
en o 03
o o
0
V
0
-P CO u 0
£ ft -p
CO O Ü
O i—i i-H
O
£ > = <3
Si ss si
3 0 W) cd -p CO
u 0 ft
-p CO O Ü >>
0 0
o >
<
T
w w >» CO c < 0) u c CO
£ o t 0) OL
£
I o II D) I < :•:: ■*-»
1; ° i; Ö i; CC
SWXXX!V!XXX!«X^^^!&^^

The Behavioral Approach
to
Systems Modelling
and
Control
Jan C. Willems University of Groningen
The Netherlands
J.C.WillemsOmath.rug.nl
RwG

«,lrt«"«*>*'««V
-*-

-»#-

^0'Zf/ ffrineSfJf ***of*M»j
-<P-
TiTJST
>
»tod*/ ^/>«We»/^ ■****.+'•»
*?, *J« •••» *y
/-

7fctf«'*p + ftwmwigf
-t- He,«'«.
^>A**4/# .•
A/» **£" - CS******
-*•

Jen* **/*+?* 21 j&vt
-/-

i
4
9*
J
i i i o
4
ii •l
-S

U<Us>+'»J 1*'"+
-/*-

+Ts *r9+,fi**yk*t « ..
«*r ^KXrt/l c
mS*~ - '■ «j wjwiMMpMuuflwk.il .wiLiiu^w ^■^.^w^'T»^g9qjgTw^l?^iMBi^^ : wjr^r^^r^"-"

*"**» ~"~"%,.%„,.■ ?/ist mrt*
cute/ ** ******* of *&"*
C»mt +»'»* */ *%**UJC"*f -/*+
/>*/*•*• fLm/»+ ©/
y/fl*m+U+
'»^'k»^«;'*Ji.-''9--w«wiPt^Bp^ ■ ■ ■<

/96s'zm.c*
/?#/OH**rtS
yj- tf^tmmmmMtf^^'WPimi* wmn*w„>*mMM<M\ mm-m^mi%„^Hmmmk*fi%%\sX9mB^v^:-J**wwtf-'w» »j.m*v*iw-"-*~- w..^l^•m»^^m^w*%*m***&zrf*m^^**■■m•-■»"-'■'»*■■■■—"M*»»»-'-! ■■"" '-' ll" ^^1^'^7l?y^üWl^^f^*^^*~^ ^ *

• . . «ar r rr w~w www mm* \p W ** fi
'THtnom*"* *** #"** JH*C+'O/*3
I

(W*A)
^'i'^l?<*<»*) f€s¥ to/,**'*"
Jy<
-/#
«-?'.■ i .i.^gwy >■!. i M Mi ■ »■«» iini|ijp,L-fw»n.»iii.i»n.,L-,«»»l"T- ',M! 'jJW''.-T~—■—»—'■ •«"'' 4M» ■ u"' y»" "'—™ •«■"» . " ■'. .'.JU'I-Jl'.TOUHV'iW "." * W'M

w r
Xt£)*rz
cfr»*»t,C V/a+o» mst+mnj
• /*»* can ** tx/*Z*ss€c>/
"■wji,1.™^ "i'i «ji»5^jtj»"-
0 II
:ft
9 m
*•
*
^
5
is
ft;0
u
-y-
n •1 •
* * V
es
II
■=■ TTwt --.^y*^ai?«»,^w3 i-i

<Pot»n*»*SmJ /****/€+*
ttO,/ \—# A4WM^«^ O/ «OAT*
J—+9ce/R ~~+ Tit*) e 0Z • X •
•X •
€
ftXfl
«*.
- -*■■*■ i i— ii m» wmv mi"mnmm».wutmv> w [■^■'•'.•''jmmfusi^Fi.v".< ;tM <&■>&*•"■■"' -™-s*"-v—

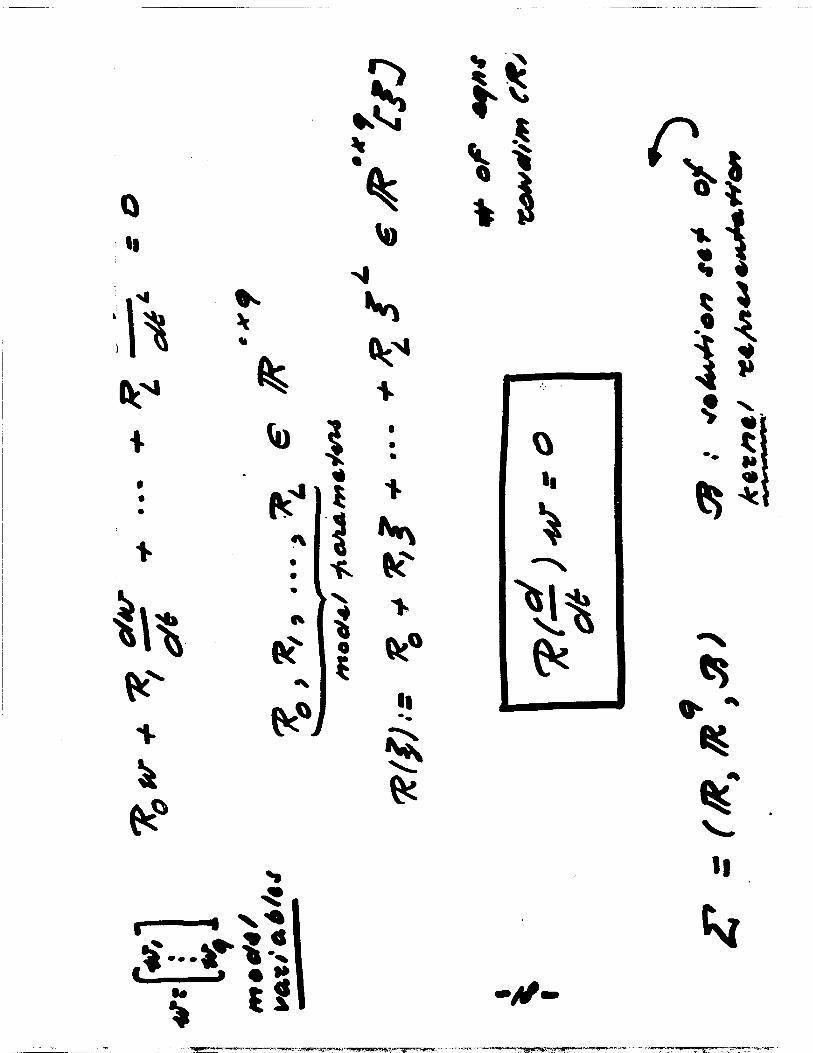
//WCA« ¥f"m% • tor***'*»* *+<*
0 *0tt "st"
as
7*(4)<* - "'Ji^ It*«**
<Xff)S * + *,W+- +%*"
*(f> s % + ",T+" + %* A>
-*C* -fofrfOA+SmS ***/%*'C+*

«**•*• &?• ^ »ciiaEL^L^l © V* o o ° * X X * •
w ^ O © N
©xQ©0©^^^ I
• * ° ^ 7 Q © ©
© O O i v v
I
I
07** X t I
^I5S © © ^ o * ©
O o
> X
%r o © © 7 x
^ © * © o *
© © © ©
ii 0©*©x ©<>%►©©
© © © Q © O © O ^ *
-*/«
II
\ *
\
—gwwww ■. w ji i*jfm.w*Mu>>v~r-> ■vti-^-^

-/#•

ete ■9-
Am»*/ jt»i*> Hi*,*
U
(*,M)
-it-
*■■*■ l"lW»»^lMl|."ffaJW'.ffa.t.»|waWBqBHPPW|ww Ulim MUH WWm*w>&?r&am&m!»?-~*:-^p>^;»■■■PPW-'^'v'■I-WIW««{?.T«"^:' "J"' ■' JÄ-'- .i,J*PJSi,JW ■

/v*
CA/4 f
*o/i+ /on n -- otfiW*
##<> * r#> + c*+> «* ***
5* Ct* c/1
C*1 2 ;
*(>•*** >t~\fr\
(Ci)+ (<*) +(++) f
obt+i»
z*i$-
(\+<\j>» <"**&>** \ -IV-
"JM!g-.<WWWH-L ■'■■uaiw.i'vuit, »■ '.J%HUtLW<M'„^'.^'mX,'"^f-

-&. two*/** tfs.r<^,*j,->+5^
J** *"+,i * .// — J
.is- oft***'»? 1*e

no T±**o* t*fy X+/*,*'*
*Z *~" "** /S * eVjp#l*"+?AS ifUAr*'*
/to¥ a /n*&*i C^ jmo**»** ••:•
-J/-

£»/«»//«*'*'*
attw**'*'**
//» «
&tAAJ*'**-+t
Kb* IS
*-

eft '* * f*tUJ £jr**nt*j/
oo»+to//*6iJt*y
*y*¥*m 16*.+ /* con**. 4
7

r — w«
?*fT»¥»&* ** ***** * ** CO*ftxo//a6>/€ tf
HiJ^HW IJ,'l'j,«*l''i^-:3)EM»

■h
-Jo-

ST,,**'.- %+**+- + *'
mm**" /*
con¥xa#m.hfr if***' •»& '/
to*«/>'** tfr P4M-+*
j, #,,'4 f**W A+* ***** 3+—*+*'*
*. »■■ » Jliu» .P^Jtii«aill),l Jtfei.»ii. >awiiL,.«»

IAWJ
eft
+ /J0 *t**ti'<0' />» /*#/»*>**** C+*4
4*
t • At***/ *4J*
• •
... *Q, *« «*»* • • • -JS-

KS ##t*» - /;
/* «•"/«•//«4/«
»** *<*ec
V

r • c*. Y* V> *>
06sv***jmt
%m
*Z
* *'*<'
/k /.
M m
1*1
••«
I, CftmUaJ *t/*. / *£ =•" 4. •£««/*/ S»'mUm* >' IfiW , Jf*
UUgjIIU _M1I I f<f_WJu< WP^irimm wuugViBl." ■■ Myn i -.. .. »mm .WjWi
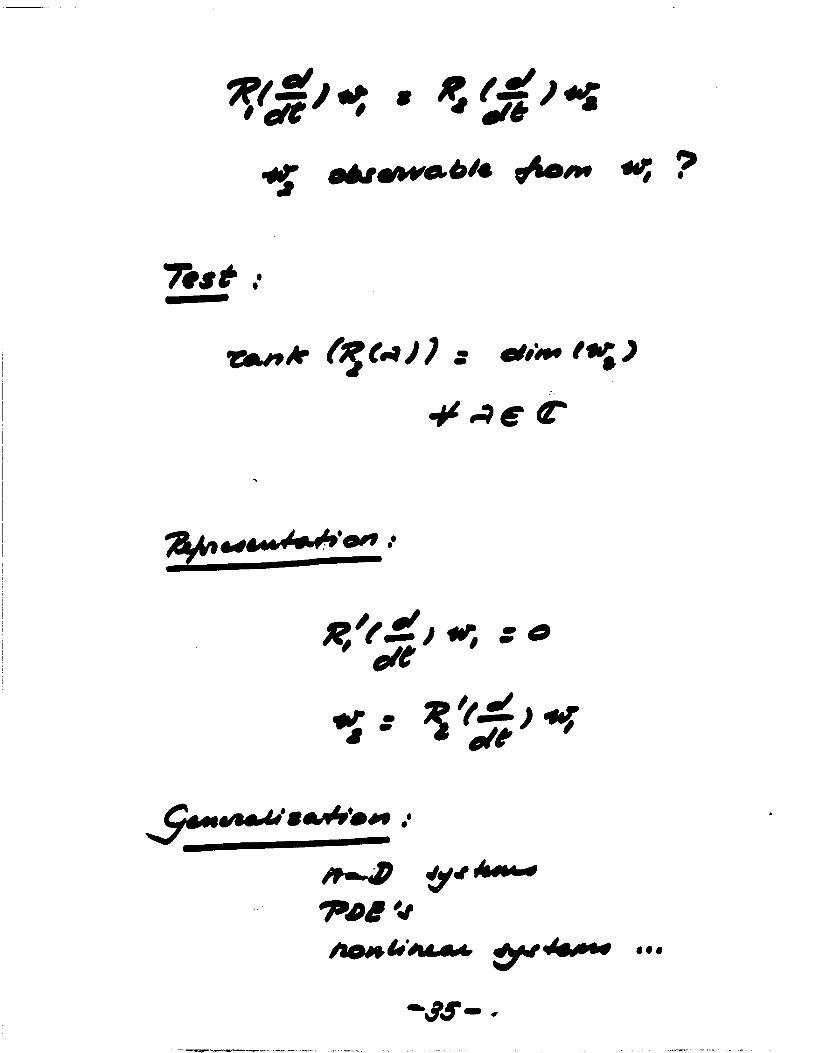
Ttst
• ••
~3S-

Co»***/
Zfa+vtco^/fc+o/r
-if-

^
I
5 >j
4
^#-
$
4 in !WW'L '".■■■iiiB^y.WB

sf/>ec**>/ c***
r*/tic*+U*
-&-

—■—■" SU6M*£2

-</o-

CO
1 •6
0>
bO C
• «—« CO
i
O o
5
1
-f/-
•
I
G^T-^wrwif"^ p!P*l*lW^'l*wr****- ■ >«sweEV*' cj

J7*»t# £X*ttMF
yb/0/ a m+4l_ a¥ a 4«i,+c*,/m*_ ***+*"
<M+*&:
€XOf**«"
&»/xo//*t: ?
9 •
Mt9tM •
-</«. <Vv f
■yiw.Pf'y «■■ju.^rwfjip»

*fa»¥ .«
"—>9* f +
Co***f/ i*»r,<
/#/'
ate* **
Cor> **»'/+*
**+ " 'J£9 * *£ 9 *? si
• • • t**^" **** *
</$#*AccU •tcan^U .•
-#-

Off T **•*•>' +mtfi/*'4*
**"*> ""£&
•faq/L - * fie/''".9
fi+£ ** MJ4AA*4 ;*u 4* A* / ^_ «/*** at

of * CCS****//*-"'
cm**.
-*$-

i
1
i
9
C
>
&>*
.0
i X o
«
-**•**
JIJpBWf ^. W!MW ■■. ■ ■«■Wjypijy^i'l'Tgijl mw.M^jm}™ '

**" Cure) *•&** cof»*wc>/
fir 6*/o%* co*»**ot
7? UACL*/** 0/ k*x,ta,****
*r com/La+W* ***** Cs
-*f-

€ <
,**
*f«eC~CA.*Vl3« -^
eo*»/*»^** i^
«*♦ 3 c e c
'^^■ÜW^i
/V#c*V^*»>/ r*oje2j •?**#
^ 7C c 7* c &

ft s f„ \ (*Oj € 0}
«
o6-fcJn«jof o» ***** /a
-V9 -
I.W«1J Jill». 1.1,1 .-ill

■■r? -so-

• st -

/fcr/l/*«*««»*»*/*
-4E-

*****+*/+$
at*
f *r w**>/*** CAM. •*+&£&$&**
9*»« 1*+i+ ***** **<*»***»"**>
;x <*******
'-S3-

7ftAt yS<uw*A*** A
&/k jLM*^»*~* *****
. yt. cm»***'
-S{-
^m^m!^y^wf^^^m3^^r^^^^'>^'^AT'' ""■^,"v^7^r^^^^- :-* . **.;.. trr.a^t- -

/»£*//» >
-SS-
'iIIWtrA.*"'""1!"^^^^-" *"-■*'!-!•-»«■" **mamm'—™-tw*imi

-S6-

REFERENCES
BOOK
1. J.W. Polderman and JCVV, Introduction to Mathematical Systems The- ory: A Behavioral Approach, Springer-Verlag, New York, 1998.
GENERAL ARTICLES
2. JCVV, Paradigms and puzzles in the theory of dynamical systems, IEEE Transactions on Automatic Control, Volume 36, pages 259-294, 1991.
3. JCW, Models for dynamics, Dynamics Reported, Volume 2, pages 171-
269, 1989.
4. JCVV, From time series to linear system , Part I. Finite dimensional lin- ear time invariant systems, Part II. Exact modelling, Part III. Approxi-
mate modelling, Automatica, Volume 22, pages 561-580, pages 675-694, 1986; Volume 23, pages 87-115, 1987.
5. JCW, The behavioral approach to systems and control, European Jour- nal of Control, Volume 2, pages 250-259, 1996.
CONTROL
6. JCW and H.L. Trentelman, #oo control in a behavioral context: The full information case , IEEE Transactions on Automatic Control, Vol- ume 44, pages 521-536, 1999.
7. JCW, On interconnections, control, and feedback, IEEE Transactions on Automatic Control, Volume 42, pages 326-339, 1997.
8. JCW, Generic eigenvalue assignability by real memoryless output feed- back made simple, Communications, Computation, Control and Signal Processing, (Eds. A. Paulraj, V. Roychowdhury, and CD. Schaper),
Kluwer, pages 343-354, 1997.
9. JCW and H.L. Trentelman, On quadratic differential forms, SIAM Journal on Control and Optimization, Volume 36, pages 1702-1749,
1998.
10. JCW, Path integrals and stability, Mathematical Control Theory (Eds. J. Baillieul and J.C. Willems), Springer Verlag, pages 1-32, 1998.
-47-

RECENT PROGRESS IN
FEEDBACK PASSIVATION DESIGNS
Petar V. Kokotovic
Center for Control Engineering and Computation
University of California, Santa Barbara

ACTIVATION OF CONCEPTS
Over the last ten years several descriptive
concepts have been activated into constructive
design tools such as
• Lyapunov functions -* Control Lyapunov
functions (CLF)
• Total stability -> Input/state stability (ISS)
• Passivity —* Passivation
• Optimality —> Inverse optimality
leading to design procedures like
• Cascade passivation
• Backstepping: robust, adaptive, stochastic
• Forwarding
• Passivation using LMI's

FOUNDATIONS:
absolute stability: Lurie (1951),
passivity: Popov (1960),
PR Lemma: Yakubovich (1962), Kaiman (1963),
passivity and small gain: Zames (1966),
inverse optimality: Kaiman (1964), Moylan
and Anderson (1973),
dissipative systems: Willems (1972), Hill and
Moylan (1976),
conicity and margins: Safonov and Athans
(1977), Safonov (1980).
DESIGN TOOLS AND PROCEDURES:
Lyapunov design: Meilakhs (1976,1978),
Jurdjevic and Quinn (1978), Corless and
Leitmann (1981), Qu (1998),
control Lyapunov functions: Artstein (1983),
Sontag (1989),

backstepping: Tsinias (1989), Byrnes and
Isidori (1989),
ISS and ISS small gain: Sontag (1989), Jiang,
Teel and Praly (1994), Teel (1996),
passivation: PK and Sussmann (1989), Byrnes,
Isidori and Willems (1991),
adaptive backstepping: Kanellakopoulos, PK
and Morse (1991), Krstic, Kanellakopoulos and
PK (1992),
robust backstepping: Freeman and PK (1992),
Marino and Tomei (1993),
ISS and Hoo backstepping: Jiang, Teel and
Praly (1994), Pan and Ba§ar (1998), Krstic and
Li (1998),
stochastic backstepping: Krstic and Deng
(1998), Pan and Ba§ar (1999),
forwarding: Teel (1992), Mäzene and Praly
(1996), Jankovic, Sepulchre and PK (1996).
In this lecture
• Locally optimal backstepping design
Ezal, Pan and PK (1997)
• Passivation redesign
Arcak, Seron, Braslavsky and PK (1998)
• Observer-based feedback passivation
Larsen and PK (1999)
• Passive observer design
Arcak and PK (1999)
• Example: Ship steering
Arcak, Fossen and PK (1999)

CLF Construction
Backstepping Lemma If V(X) is a CLF for
X = F(X) + G(X)u
and
L(F+G«)V = LFV(X) + LGV(X) <x(X) < -a(X)
then, V+(X,x)=V(X) + (x-a(X))2
is a CLF for
X = F(X) + G(X)x
x = f(X,x) + g(X,x)u g(X,x)^0.
Example X = X + x
x = u.
V(X) = X2 , ct(X) = -X3 - X
V+(X,x)=X2 + (x + X + X3)2.

Xo = Fo(Xo) + G0(X0)xi
X2 = f2(Xy^>X2) + 92[X,'X>1>X2)'X>3 (SF)
Xn = fTt(X,x) + gn(X,x)u.
gt(X,.-.,Xi)^0
L(F0 + G0ao)Vo(Xo) < —CTo(Xo)
Step 1. Set X = X0,x
backstepping lemma:
Step i. (i = 2, • • • ,n)
xi, V(X)=Vo(X0), apply
V+^VTCX,^).
X =
Xo
xt_i
, x = xt -* V+ =: Vt(X,xi,--- ,xt).
Step n Vr^{X)X^,^'^ ,xn)

Locally Optimal Backstepping Design
K. Ezal et al. - CDC 97 Best Student Paper
X = Ax + f(x) + G\{x)'W -h 02{x)u (strict-feedback class)
Robust backstepping:
Vi := Vi-i + öiZ?
Zi+i := Xi+i-ai(xu...,Xi)
dcti
dxj (0) = a u
Globally Inverse Optimal: u = -r 1(x)5nzn
/•CO
J = [q(x) + r(x)u2 - i2w'w] dt Jo
r(x), q(x) — a posteriori constructed!
Desire Local Hoo -Optimality: i = Ax + ßiiü + B2u
Requires r(0) = Ä, fe*(0) = Q, £» = <?x(0)
A > 0, Q = Q' > 0 - a priori specified
Solution: Cholesky factorization
PA + ÄP + P (7"2#i£i - B2R~lB'2) P + Q = 0
P = L'
o
0
<$n_
L, L
1 0
-aii 1
-Otn-1,1 — CXri-l.ri-l
0'
Result: Locally H«, -optimal, globally inverse optimal

Stability region of an H«, design
»1 = x\ -f- x2 + w
X2 = U
Linearized system:
X\ = X2 + w
X2 = u
Cost functional: /»OO
J = j [a£ + x2 + u2 --y2!!/2] <ft
Desired attenuation: 7 = 5 > 7* = 1.27
Optimal linear control:
t* = -B'Px = -I.O6X1 - 1.78s<
0.8
0.6
0.4
0.2
»? 0
-0.2
-0.4
-0.6
-0.8
EXP0N.- STABLE
.» ^
\
-J » L.
0.2 0.4 0.6 VST —. L-i %
0.8

Global Asymptotic Stability of Nonlinear Locally Optimal Design (w = 0)
Linear Nonlinear

Passivation Redesign Arcak, Seron, Braslavsky and PK (1998)
H o Nominal plant
x = o(x) + r(x)v
A Input unmo deled dynamics
v = HA(£,U).
A is 0-GAS and 3 pos.def. TT(£.) :
TT(£,) < —Au2 H- vu, A > 0 (excess of passivity)
This includes stable linear A(s) with
Re{A(jcu)}> A.

Find pos.def. V(x) such that
UV(x) < (LrVM)2 Vx^O.
Then. u = -kLrV(x) k>x GAS,
Proof: Shortage vs. excess of passivity
Shortage of passivity 1 /k: kV = kUV + kLrVv < k(LrV)2 + kLrVv
Excess of passivity A: it < —Au + vu
u(X)y =kv(x) + n(y => u<o vx^o. X = 0=^>u=0=>£, = 0is the largest invariant
set by 0-GAS of A.

When does such V(x) exist?
Iff 3 CLF V(x) such that
r UV(x) limsup 2 < +00,
Construction of V(x)-
Find positive 9(-) such that
(i) L°V(x) <9(V(x))> w (LrV(X))2
(ii) lirat-^oo J0 9(s)ds = +00
Then.
(L)
Lemma When Ho is strict feedback (SF), our
backstepping CLF Vn(X,xi, • • • ,xn) constructed
from Vo(Xo) with
TLF0+G0CC0^O(XO) < — o"o(Xo)
satisfies (L) if Vo and <JQ have pos.def. Hessians.

Passivation Redesign Example
X = Xs + x
X = V
12(s + 35)(s + 20) v = u = A(s)u.
7(s + 40)(s + 30)
Excess of passivity Re{A(jtu)} > A = 1.
V0(X)=X2, cc0(X) = -X-X3, a0(X)=2X;
3i2 V1(X,x)=X/ + (x + X + Xi)
UVl(X,x) <3 + 9vf(X)X)
(LrV^X.x))2 2 4
Choose e(V1) = | + |V2, k=i = 1,
u = _icLrV = -eiVOLpV, = -2Q(V^[x+X+X3).

Feedback Passivation (FPR) Design
In design we use state feedback
u(x) = oe(x) + ß(x)ü
to make H passive for the input-output pair
r>*
A
y u ß(X) H =►-
/ i X
a(-)
This is possible if
• H is relative degree one:
u appears in the y-equation,
• H is (weakly) minimum phase:
the "zero dynamics" which remain when the
output is kept at zero, tj(t) = 0, are stable.

•
Observer-based FPR Design Larsen and PK (1999)
x = fo(^,0) + g(x)-y2)Ui
E, = A£, + Bu
yi = C]£, y2 = C2£,
Design an asymptotically stable observer
AjM + MA0 = -I, A0 := A + LC2, M > 0.
• Design a state feedback gain K to stabilize the linear part of the system with A^ := A — BK Hurwitz and (Ak) B, Ci) passive by solving
A^P + PAk = -Q<0 P>0
PB = C}.
• Design a stabilizing u from the CLF
W(x, £,, e) = V(x) + -lJ?l + -eTMe. A. \x

ö
en Q
fa
CP en cd
i u
> 0 cn
42 O
CO
0 +3 CG >> CQ
05
4-3
<<»y
<^y
CD
JH o ;-! CD
J-l CD > u CD CO
O
d cö
+
I
ü cö
X)
CD
<4-i
CD
4-3
4-3
5»
+ CD
I
+ "ET
CD O
^ ^ ^
• £3 *Uy -CD
cq
EH
+ EH_^
Ä o
EH
+ CD
ßq
h
I CD
EH CD
•uy
^ ^ ^
I
EH
ßq II
4-3 __CD
d
&i EH
cq I
EH
CD co O O
rd o
CD EH
CD
1-H I =1
+ EH
I
EH
cq cq
EH
I CD
ßq
EH Vy
+ CD
EH CD
=3.
CD
fe;
I uy
EH
EH_^
H |CN
I
EH
0Q
EH EH Q
HlCN H|CM VI
<jy
O EH
I I
^ ^q
EH
cq +
N a
I <<jcy
VI .d 4-3
<
o 4-3
CÖ 4-3 ü CD
4-3 CD
Hd CD
,d 4-3
d co d CD
• r-l ü d
• 1—1 J-l
PH CD CD d CÖ
• >—i
f-i
? d
CD
'cö co cö
1-3 CD
rd 4-3
a o
M—I
co
o

to • !-( w a>
PH
a
0

Ö
w CD
PS (In
ü cd
X)
>
O
IH-
5>i
+
■«
■uy
s cq <u> <u>
+ o o II II i—i <M
II S3> 5% •<AJ>
(M !?3S
<<£/!
C<I
oq O + H
<J^<S ^
cVy>
ä
HÜ

Passive Observer Design Arcak and PK (1999)
x = Ax-iKx)+Y(y,u), y = Cx>
Observer:
* = A*-1|>(«) + y(y,u) + L(y - CS)
Observer gain matrix L to be designed for
M*) =
^TL(XTL)
I|H(X-L): nondecreasing (ND)
(ND) =$> a [i|)i(xi) -ikfe - cr)] > 0 (sector)

Error dynamics:
e = (A-LC)e-(oMx)-iK*))
Indicator matrix K locates the nonlinearities:
K = diag(ki,--- ,kn)
/
K = 0 if \|H(XO=0
1 otherwise
Note: PK = K does not imply P = I
z := Ke
4>(t,z):=il)(x)-il»(*)
zTcj)(t,z) > 0 (sector)
e = (A-LC)e-K<t>(t,z)
z = Ke.

Observer Design
v e = (A-LC)e + Kv
z = Ke
Find P = PT > 0 and L such that
,T (A-LC)'P+P(A-LC)<0 and PK = K (PR)
Then, whenever e(t) exists, it satisfies
|e(t)|<k|e(0)|.
Proof: PR and sector properties.

Control Law Design
x = Ax-iMx)+Y(y>u), y = Cxy
Find u = oc[y, it) to guarantee
x(t)| <max{ ß(|x(0)|,t), 9 (supT€[0>t)|e(T)|) }. (ISS)
Main Result
If (PR) and (ISS) a,re satisfied, then (CL) is GS.
If, in addition, (K, A — LC) is detectable and,
i|Vs &re either strictly increasing or identically
zero, then (CL) is GAS.
Proof:
(PR) implies |e(t)| < k|e(0)| and, with (ISS),
proves GS. From (PR) and Barbalat's lemma
z(t) = Ke(t) -> 0.
(CL) is autonomous and z = 0 dynamics are
e = (A — LC)e. Detectability implies e(t) —> 0
and GAS follows from ISS.

Feasibility
(PR) is an LMI in LTP and P = PT > 0:
(A - LC)TP + P(A - LC) PK - K
KP-K 0 <0.
Feasibility depends on K, the location of I|H(*I)/
Example y = x-\
XT = X2
x2 = -iM*2)+YCy)+u.
ih(x-,) = 0 ->K = 0 0
0 1
(PR) satisfied with P = I, L = [ 1 1 ].
Evaluate V for V = \ e] + \ e2 along
e-| = —ei + e2
e2 = -ei -(iMx2)-iM£2)).
V = -e 2
i e2(^2(x2)-^2(x2-e2)) < -^

Example: Ship Steering Arcak, Fossen and PK (1999)
f] = ][r\)y
Mrv = —D(-v)-v — g(r|) + T.
D(-v)-v = D0-v +
5iCvi)
Do=Dj>0,
Sehe)
6i(-)'s are ND,
Observer:
ft = J(ri)^ + (ri-ft),
M^ = -D(^-g(Ti)+T + JT(ti)(Ti--ft)
V(TI,-V) = -fjTfi + -yrMrv,
V 1 1 yn fj — T-V'DO-V-'V [5(-v) -6(-v -~.T --v)]
1_T- 1-T„ - < -jT[ T| — --V D0-V.

Observer Based Control Design
V
xi
X3
= ^1
X2 +Xi
X3 -X2(l +x|) +U
2u.
A =
0 1 0
0 -1 1
0 0 0
M*) = 0
X-
0
C = [1 0 0]
^K =
T("y>u) = u
2u
0 0 0
0 1 0
0 0 0
(PR) satisfied with L = [ 3 3 1 ] T

ISS Control Law Design by Backstepping:
V — Xi
*i — X2 + x1
*2 — *3~ x2(l + x2) +u
X3 — 2u.
Relative degree two + ISS zero dynamics
—> two steps of observer backstepping:
iStep i. xi = x2 +xf
ai (xi) = —xf — xi — riixi , n-| > 0.
xi = —xi — TLi xi + e2 + (£2 — tti)
5tep jg. Z2 '•= %2 — oc-[ {x-[) = X2 — oci (xi) + e2
z2 =u+q(x1)x)--—e2 OXi
u= a2(x1)£) =-q(xi,Ä) -XT -z2-n2 (fff J 2:2

Proof of ISS:
XT —x^ — TLIXT -fz2 + e2
Z2 = —Xi — Z2 — Tl2 3ai \
9XT y z2-
3ai
3xi e2
ISS Lyapunov function: V(xi, zz) =x\+z\
—> (*i >*2) subsystem is ISS with input e2-
ISS of zero dynamics:
r) := x3 - 2x2
f| = — 2r| — 2x2 + 2xf (ZD)
Cascade of ISS systems is ISS:
e2 (x-|,x2)
subsystem
ISS
*2
ISS

a bO 3
-t-» ^
1—4
cd bO
o 13 PH H
•*» 0 cd S-4
n. , 1
• i-4
cd 0 1H
+2 0 ü 1
• iH
ö cp 0
0 *d O O 0 0
p_4 0 cd o cö +2 TJ I—H
»i-t • P-4
a CO
0 • PH a > 1
and
Opt
> 1—4 • l-H
CO
cd
s • 1—1
« PH m
ätic
a -
Un
i
and
s e
Roböti
ca
CG 0 cd 0 13 S
• i—»
0 -p
CO PH 0
T5 • 1-4
A CO
CO O 0
Ö 0 s
0 -p 3
cö +3 -p -P
?-t CO cd Ö a hH 0 Q
SH 0
0 ü .a 0 H cd 0 CO 0
bO Ö
• 1-4
S-4
CO
0 . «* 0 >> ä -1-3
• 1—4 • l-H bO
CO $-1
Ö 0 a > • 1—4
cd 0 0 +3 ü cd
0 -+j CO
0 CO
CO
a 0
-1-3 CO
CO
0
bO Ö
CO • 1—I
>
a ö o tsi
• 1—4
S-4
<:

cd ,_, bo cd 3 bß -p 3 0 ^
PH O <r\ PH
cd rv
s-i cd PO ^ a £ • l-H
0 s • l-H
Q o 0) O
"d 0
0 TJ . I—I
*0 o l-H
PH *o cd PH
I ü cd -P o
• F-4 -P
.Q *o
CD
O
0 CO
cd
U2 o
PH
CD
CO
S CD
0)
a -p •i—i
CO s CD
cd
s Ü 0 Ü
0) -P CO
CD £ >
• l-H
■^9
• 1-1
CO CD
*Ü
0 -P 3
-p CO
♦ i-H
CO
0
o -P
-p • iH
CO
0 >
•i-i
Ö &
ö 0
u cd
4+H
cn -P »i—i 3 ^ 0
cd -P
CO -P • i-l -P
CO
0 -P
CO
>> -p • 1—1
o l—l Ö Ö CO
• •
u <
1 >—1
1
CO
3 0 > Ö
CO S-l 1 •i—i
CD i
O -P o
3 cd
bß •i—i
0 1
cd s T3 3 Ö o o cd o cd 3
cd *-<
O ü P^ § W • • »
"o fr § tf K Ü O
c^

1X1 0 Ö
• p-4 p—4
a co ä cö 0
*0
cd
CO a> o CO 1—4
■o CO ■+3 a cö 0
Ö o
• PH
1—1
Ctf
Ü a 2 • p-4
CO H -P OH
CO 0
0 •i-i ■p
o O -r-C
CO
O CO
CO CO <D CO
• 1-4
CP Ö • 1-4 a» »i-H i—1
U4 i-H > a a P3 ^ CO
0
CO
0)
-P • i-l
CQ
S3 o ä o • PH •p-i
Ö +3 p—H
rt cö o CO
> ♦ PH
?-l 0)
• I—1
■s 1—4
0)
0 Ö
+3 0 0)
• i—i r—4
OH § 0 P4 CO
Ü cö o u A
cd p—H
CO Ö O
•i—i -p cö
• 1-4 P-i
$ 0
P3 H
o u
■B O u
p—I
cö
-P a o CO 0 Ö
• 1-4
'S o ä
-p
CO
Ö O
♦ 1-4
0 0 Ö Ö o Ü
PS o CO O J-4
04 CO
ä CO
• 1-4
ä o -p i—i • 1-4
a a 0
ü
H
o ö
Ö cd ö CO 0
TJ • PH
S3
H -p Ü
PH -P
CO Ö O Ü
O -p
•p »PH
P-I
o bJO
P—4 a o
• p-4
PH
-P 0
o 0 bß
CO
a P3
o • PH
CO P3
ü Ö o Ü
P3
CO

CO cö CO cö 0 u a
43 0
CO
bo o O S3
43 0 0
•p
cd 0
• l-H
"8
<2 cp CO
cd
S3 0 CP
42 CO CO
43 CO cp S3
• l-l I—)
ft CO
o >> $H O CP
43
0
CP TJ • iH
cd i
$-i CP
-P
O cp
0 CP a -s
-3 >>
■s CP 0 0
0
o
T5 S3 CO
CO •i-t
CO >>
l-H CO S3 cö
i-H CO 0
• l-l u 0
S3
>> u 0 0
43 ~p S3
bo S3 0
•i—i CO 0 • l—l
+3 TJ ctf
a • I-H
X 0 ?H
0 • »-1
u -P 0 s
ft o OH 0 CO bJO
cd CO
0
CO a 43
0 cp CO a CO
CO
■8 •i-t
O ft
CM O -p 0 CO
cö CO 0
■8 F-H
O
M 0
8 0 >
S3 o
ä o
•i—i -p 0 S3
0 S3
• i—i
"ft CO
<
CO CO O ft CO a
43 •P o o
CO
CO cö 0
42 O
-p
*d 0 M • ** S3 cr 0 H
CO • *H
S3 cd CO
■g • l—l
O ft 0 CO O
43 -P
S3 0 0
-p 0
42
S3 O
•i—i CO CO 0 $H
ft
0
CO S3 O
1 H 0
H-3
• S3
• i-H -P CO S3 £ 0 S3 •i-i
• >H 0 S3
cS O ft
S3 CO
44 1—4
*M l—l
0 -d S3 0 0 0 ■ £ S3 ö •I-I
O •i-i
bO • iH ■&. 0
-P CO
•8 s CO CO CO 0
a- •I-I
8
»—i
42 • *H
CO
O
a •rt o CO 0
S ft M ft
#© «H 43 -p w
ft ft CO
43 bO S3 •P
i—l l-H
CO
0
8 0 CO S3 #N.
l—l u O 0 CO CO 0
• 1-1
43 -P a • iH
8 0 S3
-P CO u -P • IH l-H
0 cd u ft
0 > u S3 0
43 -p
0 > o 0 bJO a
15
S3 ft
S 0 0
0
ft CO
0 • I—I
42 S3 0
T5 0 CO
1—H 0
• l"H
O O
s CO
bO S3
•i—i •p -p CO
S3
$
CO
0 43 -P
0 >
u cd
>> 0
43 -p
■s 43 -p
U a 1—1
0 • l-l ■P
JH CO ft
S3 0 u
u 5 43
CO
S3 • PH
CO CO 0
CO >> 0 0 S3 S3
i—i
S3 0
a a
S3 S3 •i—i i—i
O •I—I
-p • »H
S3 • iH
S3
ft CO
0 S3
43 0
43 0
1—1
3 o 0 0 a tw 0 -P <p
0 0 0 S3 0 S3 >> S3 u S3 0
•I—I o •FH •i—i i—i I—I +a i-H
ft s ?H
ft CO 0 W CO »—I
0 OH
• o • ft •

T3 Ö CO
CO 0 Ö
•H
a CO
o CO CO 0
• iH
CD Ö
O 0
O -P
CO -t-3 u
CP
■s CO 0
CO ♦ iH
Ö W)
• i-H CO
ä CD CD
42
CD
43 0 u 0
43
CO u a 0 >>
"S CD U 0
u O 0
H-3 p—4
o 5-4
Ö o o
Ö 0 0 CO
>> CO
•i—i +3 ü CO u
I-H
0 a u T*
■B 0
Ö CO
0 >> CO
0
IH 0 0
43 CO -P 0
i-H Ö 42 • 1-4
CO •i-i
0 i—«
> 42 0 O
• iH ?-i
a CH
CO s-i d O >>
Ö
*c? a
• 1-t
cd cö
•+3 CO J-H • i-H
0 #N
o ,d 43 o •s ♦ 1-4 i-H 43 TJ
0 ö SH
• i-H •i—i CO
s 0 73
0 i-H CO 42 o £ s-l Ü
a i—i i—i
bJO c2 •I-I O 44 +3
u CO T3
0 o s-4
0 0 43 tw
H 0
• CO
CO -P 0 43 a 0
CO
a 43 H
CD
CO
-t-3 CO CO O
ö 0 0 •+3 •
S 0
1—4
• iH
>>
I-H
•8 • iH u O
0 CO
• iH ?H
O -P
CD
• iH J-4
-P 0 0
S-4
0 >
42 0 ?H
0 r
0 CO $H
• iH
bO OH
c? ?H
• iH
a +3
0 43
CD a O
+3
0 CO Ö
43 • iH
43 • H
■s 43 +3
>>
o CO
l-H 0
• 1-4
0 43 CO
■4-3
l-H o s-i
0 CD +3 Ö -p ■s
• l-H 0 43 • 1-4
CO o CO • iH M ü 0
O -1-3
43 -P CO 0
l-H
• 1-4
a i^ o 42 CO
CO • 1-4 43 o cd Ö
a bJO 3 CO
CO • f-4
3 T5 0 O 0 CO
1—1 ?-i a 43 •+3 o o
0 42 O in
43 -1-3
CO
0 Ö
• i-H
s 43 -4-3
CD
0 Ö • H a 5-1
0 i-H j—1
43 o CO -t-3 cö -p
bJD 6tH 0 CO
0 Ü
a a o O o 0 •i—i
44 o cö
+3 0 CO
&4
a •p-t
-p
CO 0
a o o 0
42
0 42
CO +3
CO
O
*T3 0 S-l 0
5-4
O
O -t-3
i-H CO S-l
cö 43
CO • i-H
43
?H 0
3 -1-3 Ö H
4TV
0 -p 0
CO Ö CO
• »-1
0 43 -1-3
0
CO 0
• i-H
43 Ü +3 > 0 -1-3
o Ö <!
CO • I-H
CO t+H
HH
CO CO
cö
♦ l-H •4-3 u 0
42
-1-3 0 0
CO
• 0 a O -P
Ob
o
lO

bJO Ö
►i—i
CO 0 U
• lH
0 u o CO
I—I cd
0 Ö O
ö cp
CQ CP CO
• lH ?H cd
co r—4
o u
o ^1 'S
+3 o Ö o o cp o
H3 l-H -p • »
03 co
s ,£ Ö +3 o
• *H -t-3
• rH • l-H -P cd
0 TJ 0 »PH i—H
• I—1
0 -p cd
•i-M 0 O co CO
cd
co +3
I-H
a o JH
■s o
OH
CO
Ö
T3 Ö cd co
0 0
e cd
O co O
H •IH +3 0 +3
cd 0 •i—i ?H r—4 -H • l-H
0 i-H
cd H
cd >
• l-H <
0
H
3 cd Ö
-P O
•
CO ■+3 O
,ß O
0 I—H • i-H
O
bß ä
• l-H
Ö
cd i-H
ft I
+3 cd
co 0 0
H
CO
H cd Ö
£ 0 ft H 0 > o 0
■s W>
• rH
ö
0 • lH
CO 0
H3 0 > CO
O S o Ö o
+3
cd 0
• lH l—H
I u cd 0
Ö
cd bß
• lH
%
0 • »H
CO
13 • lH
^H 0 > CO
O
O ä o -p
cd H
bß
ä ä cd
l-H
ft I
& +3 cd
PH
o
co 0
H3 0 >
Ö cd 0 0 o
ö cd
co Ö O
cd fc
° Id 0
• lH u 0
H3 ft
W
+3 O
o u

CO
CO 0
3
Q
Ö CO 0
TJ • F-l
l-H Ü
w o ä
CO
CO
0
CO
CP
CO >> CO
V • PH
Ö CO
4H Ü 0
<a CO 0 O cö
CO
Ö O
• l-H
CO
bX) cö Ö O O
CO
cT co
O
bß
Ö o
• l-H -1-3
CO
o
CO
CO
CM
pf CO
CO
a o
• I—I
-1-3 o s Ö CO CP
•i—i
'o
W o CO
ft O u a
OH
& CO
u a CP ö
l-H Ö o Ö
bJO
0
ä o
• i-H
o
bJO Ö
&H o CO 0
"Ö CO
Ö O
•i-i
CO
W
o 0 0
o CO 0 0 U bJO 0
0
■s
o CO
O
u 0
Ö
0 4H S-3
CO
■s •»-I
CO
CO
Ö O ü
O ä o
i—<
o
o
0 o CO
CO
Ö o
• l-H
-3 bJO
CO Ö o u 0
o ä o
•I-I CO
Ö 0
0 43
Ö cö
CO CO 0

Ö O
• PH
a O
2
EH
o
2 CP
• PH
0)
0 PS
ö 0
Ö
CP
CO
co Ö 0
♦ PH
-p3 ü ö
CP
p-H
cd
i i—i
cd
PH
a
EH
p. T-l
I
w CO
CO
*T3 to
CO
CO
q
En P. Ö o CO
O
Ö • PH
■s o
0 ■4-3
i-H o CO
CO
CO
CO
CO
Q Q
o
V
V
V r-4
t-»
V O
II o
CO
PO
+ PO
+
+
PO
+
III
O
£ w
-+j> -H > c3 Ö
cp CP • PH o
•g a •*? o CO CP •3
• PH
cp P3 PS +3 ■Ö -»-3
CM ' Ö 0 cp
p*
d o to
»PH • PH r-l -P T) PO • PH
+3 PH
CO CP 4-
cö • PH P—1 PO
+
PO
+
oo
^1

0 o
CO
Ö cd
i—H o
w
CO 0 Ö
2 0
■8 •i-i
0 a CD
o
o
CO A 0
'r-l
0 el
• l-H I—I
CO
0 SI
»I-I
cö 5-1 0 Ö 0 bO
cö CO
CO
u< 0 CO • l-H
+3 TJ u 0 Ö N 3 ♦ 1—1 ew cö f-H
0 el
CO cp
CO
ei o cp el CO
S-3
CO
CO
I—1
o
bfl el
o el s
eg cp
^1 ■+^>
«4-4
CO
el o
T5 el o o CO CO cp Ö
Jl ■4-3
o o a CO
I
0
<! o
CN
rH
II
to
•so
co
p. I 6
CO
0
* ♦ l-H
CO
U CO 0
el o
o
II
*
CO
el o
Ö o ü
CO
Ö
o
©
II
CO
CO ö
Ö O ü
el o
13 l-H o ;-• 0
I I
CM
^
8
SO
CO
CO
Is -co
CO
Ö O o
0
0 >
•*H bO
0
cö
*£
>
Ö
OS

fr-1
«O
e Ö
e o CO
»—a
>--a
0 u O 0
H
> u 0
■s • 1-4
0
0>
o
o
+3
cd
a>
-p
Ö cd
o 'S 0
o cö
• 1-4
'S 0
t0
Eö • r-4
Ö 0 >
• 1-4
Ü
ö o
• F-4
cd 1—4
o & ?H 0
■g • 1-4
ä cd >>
ä fl
O
o -p
ü cd 0 u
Ö • 1-4 p—I
OH CO
TJ 0
• >-4
Ü 0 ö 0) bß 0
er ö
cd CO
+3 CO
• 1-4
X CP
CP u CP
CO
ä o
Ö O ü
cd ö o
• 1-4
~P ü ö
0
-P co 0 N
O co
Id 0 Ö
• 1-4 P—4
CO
0 SI
• 1-4
Id 0 Ö 0 bO co
•i—t
so
Ö cd
>> u cd
Tf Ö
o £* 0
cd co
0
-p
faO ö
• 1-4
CO • i-4
■S3 CO
Ö cd
ü«4 o
-P
bß Ö
•i—t
bß Ö O
i—i 0
co Ö O
•i—i •p 0 Ö 5
cd JS
co ä o
Ö O o
ö o
cd
bß Ö O s cd
o a 0
■s

1 ö T5 *Ö o 0 ö • H S3 o a to 0
+3 cd
eT #N
co ä
• lH
u 0
U 0 CO o Ö U O O
CO
l-H
cd • *H
0 co
0 • iH
Id er
Ö 44 ä
ß
0 bJO bß Ö
• rH
*d 0 ö
44
■0
*d
0 ••H
■s 3
0 s CM
0
ö o a CO
ä 0 er 1 43 0 $H u O ü 0
43
0 Ö
• iH
3
CP Ö
•i-i
>4r
43 -P
CM 0
Ö 0
•I-I -p
o CO
•
<
0 rH
1 ß 0
TJ •I-I
CO
Ö O
•i-i
15
ß CM
1
Ö •I-*
co Ö O
• FH
Id 3
s u 0
-t-3
o ♦ IH S-3
> O u a
cd
er 0
o +3
er 0 O
• i-H
u 0
CP
0
cd
0 ä 0
•>H
?H cd
CO
O • iH 4-3
CM
0
0 CO
• 1—1 u 0
cd u
42 0 bß
0
o
43 bß
bß
0
0 43 S-3
• l-t
Ö 13 >
• 1-4
bO
i—i
cd CO
*d 0 3 43 4fH O 0 co a 0
0 •+J o ü d -ä 0 ö ö ^j 0 ä a 0 CO
»i-t
•+3
ä
CO
1—4
f u 0
o ♦ p-4
■s l-H
bß co fl O
• l-H
0 5 0 5H
• l-H
• l-H l-H
ß
0 a O
"S 43
l-H 1—1
cd
»iH cd ä 0 +3 3 CM
ö • IH P—1
4J CO Ö 0 ü
•■H
42
co
u 0
■g
• »H
Ö 0 ü
er 0
co
O
'S o
4J
cd
o
CO
CD
er •i-t
Ö
CO
>> 5H
a u
• iH
43 ü cd 0 ?H
«s O
• fH
0 u
• 1-4
3
u cd
Ö
co 0 Ö
43 +3 o
co • rH
B 0
co 42 u cd
er 0
3 o
42
o s co
bO • ä
• iH
co co
• i—i
-4-3 tN
II 0
43 H
0 43 S-3
0 43
cd 0
r-H
• iH
43
bO Ö ö 0
o bO Ö
«0 • iH
> 'S
H ^ co
0 Ö
»IH p—t
co

Ob Ob Ob ^
1
co
Es g II fr. o 1«* ^ to £ i~~a so Ö CO
V o
•e-a to •e-a
CD
CO Ö 0
Ö 0 o Ö o
■s o u CD
■s
CD i-H
o u
o u
■g o O
I—I «i s
• 1—1
a o
CD Ü CO PH CO
■8 CO
CD
8 o
CO
■s »1-4
o
cj Ö
•i—i
CO • l-H
CM
rH
II
Ö CO
■3 a CO
ä o u Id
V rH
SO
V O
SO
O
CO
■s • 1—1
■+■»
O
ä o
S-I CO a cd
Ö
> •i—i
so
so
0> •s.
I
ö CO
I 6
3
•to
so
.Sa
o
CJ CD
"—>
CO
cj
-to •e» •<S>
Ö
8 o
*0
so
^ o »
+ : IT
II II
O
r-1
SO -to
Es 8
o 8
O
CM
II
Ö
-2 SO
»■—3
CO
CO CO
Ob •<s>
fr-
o 0$
Ob Ob
Oj
o «o
i*—a
6
CO
crjH
•<s> -to fr- C3
CO

CÖ
B CP
1—4
0 U ft
i—t
o
O o
i—I
CO
ft O CO
O • l-H
>
u ft cp
o -1-3
Ö -d ö o ft CO CP
O Ü
Ö O
•i—i
Ü Ö
ft
o CD
H
CP Ö
• 1-4
TU CO
T3 CP SI
♦ 1-4 r—I
CO
CP ä cp bo
CO ä o Ü a
ft
o n
ft o CO CO
0 a
• fH CO
■+J ^5 O cp
CO CP Ö
•i-i f—i
ft CO
CP tsl
• I-H I—t
CO f-4 CP ä CP bß
<
a ä cp
3 o Ö CP
ft CP
CO CO
CP
O
CO
Ö o
• I—I
-§ CO
4M • i-H
Ö CO
CP H cö
»—4
o
■a o U
CO
4-a ft o Ö cö CO CP Ö
♦i—t F—I
ft en
w

0 CO a u
r—H ct Ö O
•»■*
CO
Ö 0)
0
CO a» ö
I—I
& CO
0
0 Ö 0 bO
«4-4 o CO 0
i-H
a CO X
SO
II eo
V
V
V
V CM
TH
V o
II o
Ö o
♦ 1-1 -p -P
o
CO >
0
■s 0
II
CM
CO
II
CO
II
o 11
II
1P>
o II
CO
Ö o
Ö O o Ö o
• 1—4
CO 1—I
o OH
0
■a
~ CO
rv
IT 2- II
O
•5»
CO
Ö O
*d ö o o
u CO
Ö
o PQ
oi ^ o
CM . -r-
0 Ö
I—«
CO
0 • i—i
JH -+J 0 a o a o bJO
0
CO O Ö 0 Ö o ft
-H
II
0 Ö
.1—1 1—4
ft CO
o
o
ft ^ CO
II
O
II

T5 0
■8
CO CO 0)
i—i 0 P3
•+■3 $-i o >s o
l-H PH a CO CO
P-H • PH
Ö CD
• PH
CO > 0
CO Ö • PH 3
0 CO
+3 o 0 1—4 P-H
CO eC
CD -4-3 CO 3 CO ft CJ -^ 3 CO
• PH O A >> H F* Co •M CO
•i-t CD PO Ö H i—i CO ft CO
P3 CO
1 -s • PH 1-1
0 O ft
a P3 -4^
Ö
3 CO CD 13
0 PH • pH
p-H
O a 1—1 ft
ft u l-H CO CD 0 -t-3
PH «4H • l-H -R 0
Ö 0 CO CD CJ CO P£
cö +3 i—i p—1
CO o -M
a S-l cö
•>—i CD pa •+■3 O
CO
a o
Ö O
• i-H -p3
a?
o
• i-H
Ö O
• +3 O
CD P3 -4-3
13 S
■+J -4-3 CJ CD ft 0
X 0
0
O
■4-3
1—4
3 P*
,fi c2 *d a 0 o
• PH •i-i
-4-3 CO
+3 O Ö
eg 1—H F—* +3 0 3
-4-3 -1-3 O 3
o •
/IN 0 CO 0 P3 fl P-l «3
IT -4-3
a CO
S
O • PH
•4-3 • i-t
S Ö 0 CJ
t 0 ^ Ö
, , -+J 0 h a • PH
-4-3 c* 0 CO
p. 0 p-H
0 fc • •
-(-3 5_i CO 0 0 N—^ PQ ■s
• 1-4 CO 0 ä O
•i-i • »H P-H
ft CO
-4-3 CJ 0 Ö
+3 • PH
I—H
CO Ö O
♦ PH
CO
o CJ
CO
a 0
«4-4 o
i—i
PQ
Ö 0 0 *Ö rH
s ä • i-H
0. • l-H
P*! r-H
0 I 0 S-H
g s -4-3
Ö CO o
• CO CJ
K) Ö a • i-H
0 ä
-4-3 a 0 o CO
0
ä PS -4-3
0 ö Ö
•i-t i—» o ö 0 CO
0
0 •i-t i—H
1? ft CO
I-H
0 PH PS
-4-3
0 •F-l
a CO «5 0 o SH
0 P£H
CO 0 CO
Ü a ft
PH
O CO CO
Ö cd 0
ft
O
• l-H
PH
b0 1—1
CJ 0 2 • PH
H rJ
Ä fl o O fl b0 Ö Ö 0 • PH
> CO 0 Ö
• pH
p-H
o > 0
p-H
ft CO 0-
CO CO
-4-3 a 0
0 Ü CO 2 o
p-H
PO ft PQ
CO
o PH
ft
CO
Ö cd
15 PS
p-H 0 0 PH • PH
£ 'S o o • H
»o

X V a o u a a a
13 Ö o
'S • l-(
CO
es 0 ö
•i-t r—I
ft CO
Ü • 1—1
Ü
A 8
^3
to
V
II
8
o
o •■—5
CO
CO
o •<s> to •es»
O o
? Ö
O
P
II
•8
o
O
II
8
o 8
o 1?
o
o
o •eo
Ö
o
*e»
CM
II
-2 8
IT
CO
a> i—i
X o u a CO
• 1—I
X
X
0 CO
• i-H
O o CO CO
cd
Ö O
•i-t +3
CO
u* 0 0
Ö cd i-< bJO CO
i *-■ 0
i—i
H
I
2 SH 0
■g •i-t
CO
X o a a» ö o
8
CO
Ö o
o Ö a cp
+3
Co £
faß Ö 0 s CO
CO Ö O
-1-3 U a
0
CO 0 N
• i-t
a •i-t
ö •i—i
s 0 ö
• »-I I—I a
CO
o • 1-H)
u 0
0 0
ä
ä CO
CO
Ö O
T5 Ö O 0
ä o
15 o M 0
■B
ä CO
ä o X 0 s cö CO
0 X -p hO fl
•i—i
CO • i—t
•s CO
Ö CO
p.
o
bO Ö
•i—t
bJO Ö O
l-H 0 X
O

o o u
§• 1—4 a a o -s • l-l
< I
CO CD O CO
CO
0) > u u Ö o CO
© Ö
1—4 a t/3
53»
-es
<3
to
-8 to
to •
o e <o
e to
o CD
A
V
u
Ö CO
• PH
Ö fl cö
s CD
• 1-4
PS CO
•i-i
a1
CD
c2 ä cö
S Ö cö
Ö Ö cö
CD
PS cd CO
Ö O
CO 0 >
o 60 Ö
Id 0 >
• I—I
• l-H u 0
T3
'S cd
• 1-4 u CO > o 0 CO 0
O Ö 0
•8 II
to
A ^
Q
^
Q
^3
V
0 ö
►i—i i—i a
CO
0 0
H
Jt ^T
8
O t-3
o 0
♦"—s
CO
CO
o •<s> to
o o
&-. ä
^3 8
o
o
O
8 II
o 8
O
co
O to •<s>
O
o to Ö
to
II
-Ä
8

0 i—i
42 O $-1
CO • 1-4
43
43 -t-3
0
13 O o CO CO ei
Ö O
• I-I -t-=
CO S3 cr CD
0 fcüO Ö cö ^ bß cö
0
H 0
_r!
-a to
to
CO ^H
•rt CO
0
■8 42
CO
43 0 cd 0
Ö o
^
£ ^
Q to "3
öS +
CO CO SO
^3
CO
0 >
S3 o
o
CO 0 u S3 CO CO 0
T5 Ö CO u O CO
Ö 0
■+»
0
S3
CO >
S3 o 0
43
CO .1—t
Ö
o
0>
>-t
CD
CD
l-~3
CO
o
oo
Ö
OH
<D
•<s> CD
CO CD
C3 o
CO 0 CO
CO Ü
u CO
I—I
S3 0
• i—I
u CO
CO
o CO
A S3 O u bO
Ö O
■s t-3 o u 0
43
0 o Ö cö
CO
Ö •i—i
u
S3 O u bO
0 •i—i
cö CO
to
I to
s-l 0
• i-H
42 S3 CO
43 ü CO 0
Ö O
o II
+
0 SH 0
43 CO
cö
0 Ü Ö CO
t-5 CO
Ö ♦i-i
§, 0 o CO a CO
o • i-H
•4-3 0
CO
CO CO
to
I to
0
42 S3 CO
43 o CO 0
Ö o
o II
+
CO
o to Ö
CD
CD
8 i
CD
*0
53 O
.t3
oo

CO 0
3 ü
♦i-i
Q
u* 0
0
Ü a u i 0
F—I
o -d 0 CO
-t-3
CM O CO
Ö O
•i-t
I—H
o CO
0 • I-I u o CO 0
O
0) »—4
o H ft
Ö
o ö
CO
Ö
CO
0 u
CO
Ö O
•i—i
+3 o a o
o • r-H
15 a1
0
0 bJD Ö cö H
8P 1-3
I
0 f—I
0
O
CO
Ö O
•i—i
I—I
o CO
0 CO CO O
ä cö 0
• i—! I—t o
0 XI
0
'S
ä o
• l-H
o Ö
eg 0
0
p—i »»-H
U a CO CO 0 o 0 ä
3
CO 0
• i-H
u
I-H a ö o
•I-I -*> •i^
TJ "d
cö 0
■8 0 w Ü
■+J O Ö CO 0 O
CO 0
Ü O 0 >
Ö o CO
■g • l-H
cö H
CO
Ö o o
O
Ö O
<
CO i—i
cö
i—i G 0 w
X 0
i—H
cö
o Ö
cö
O
0 CO
0 >
faß
Ö cö
• i-H
Ö ä cö
s 0
•I-I
rt ä o CO 0 ä
• »H I—t
ft CO
TJ 0
• l-H I—I
CO 5-1 0 Ö 0 faß
O
0 CO
• l-H 5*
0 >
• l-H
faß
Ö cö
• l-H
faß Ö cd u faß cö
HH
0
4-3
u a CO 0
O X ü
0
O
CO
l—H
«8 • l-H
Ö CO
CD
o
■«-1
to
C3
C3
o

1 CP i CO
> • i—1
• i—i
H3 cd
3 CO tf CP >> 0 43 cd 0
-t-3 £ SH cd o
p—1
cd
43 o CO
0 Ö
• p-4 P—1
OH CO
Ö
bJO 0 M
43
CG
Ö •■-I
> i-H
o > CP
r •
cd
CO
Ö O
• iH +3
© o ©
0 a 1 o o • 1-4
i—i CD CO • » 1 *d 42 a
CP
CO
>> ö 0 PH
42 o TH o 0 o
i—•
o CO CP II >>
M
fr-
?H
g 0
i ö 0 ä
M
=2 CO
CP eo cd
Ö 2
o PH
■g o
o r—t et 3
43 •H-3 • p-4
CO
a CP
p-H
42
CO 0 Ü
♦ P-4
M
■s a
o 42
0 43 O
o o
o o •
p-i
Ü
13 O +3
O
OH O o 1
-P
CO cd
0
cd s •PH .
CM 0
CO • PH P—1
o Ü
• p-H
M * ■
»V
1—4 p-H
0 M
-M
0
4H +3 • l-H
1 3
0 CO CO a CO
a CP
P-H
42 o
PH
% o
i-H
-t-3 0
a a >>
II 0
CO cd
0 HH1
0 -4-3 +3
CO Ö
Ö
cd
0)
a • PH
4-3
CO
3
CO
Ö O
• 1—(
-1-3
• p-4
o 1 o a o
O -1-3 S_i OH CO • p-4 0 •i—i •+3 cd
I—H OH 0 0 o o TH T2" Ö o Ü
Ö o
• p-4 +3 cd
1—4
0
rO ü 0 1
«8 0
+3
0
i—«
CO Ö 0
•!-t -1-3
CO • p-4
S-l cd
CM 0
CO 0
l—H
OH
a cd
rZ +3
0 M cd
CO
o 1
o O p-H 1—4 • p-4
Ö cd
T3
Ö O O
© 4H
II T-l
H a 0 M 0
i—t
• p-4 CO CO O OH
>
P3 -P
0 -1-3
X! CP
CP >
• i-H
bß
o CO
Ö cd
OH H 0
g • p-t
CD
l—H
0 P^H
o -+3
T3 r3 CO
• I—1
-H-3 HH
-4-3
Ö CP
r—I rri
1 04
o $H
bß
S4^
43 H
0
a CO
o C4

CO
o -+■3
o o
43
03
M CO
+ M rH
S^
CO
rH
II
II •«»
•P
eo
eo p
+ IT
+ H P
+ rH
rH P
II •8
«+H CO
•i—i
■s CO
CO i—i
cö
CP rH
X 0) 0
H
CO
p
p
0 U CD
43
O
II P
^3 HO ^3
X P
+ P
CO CO SO
CO CO CD
-to
-t-a CO
o
o
O
O
o S2
CO CO
Ö
o 4-3 Ü CD m'—>
42 CO
+ N T-l
I'M
►l-H *
a*
»P
P
+ T-l
rH
P
II •8
CO • !"H
cö CO
CO 1—4
cö
0) u X CD
CD 43 H
P CO
T-l
:P
P eo
+ :P
O
II :p P
II 4- :p
CO
O»

^3
8 CO
o
o o o
o
CD CO
o -1-3
-1-3 ü 0
£i CO
N CM
3
T-4IN
3
3
tM
P
•8
CO
+ :P
O
II CM
P eo
<
CM
P
CM
^P
+ I rH eo
CO • I—I
+3 CO CO
CO 1—I
CO
0 u -f-3
X 0 0
H
bO -R Ö Jl
»PH bO CO • rH
3 r-H
0 CO >
•i-t bO
"8 •i-t
Ö r-4 u & 0
-M +» I—H o
CO Ö TJ CO 0 0 > 0
l-H
o *Ü CO
,d 0 O ^ CO
0 >i u c? OH
s CO CO
a Ö CO
0 »PH
Ö & o o -M u I—t
• F-l a a 1—H CO O u ffi •
+3 CO CO p—t
CO 0 ü PS a
p—t
CO
s • !-*
s-3 0 P-4
3 PQ
-1-3
0 -fJ A • 0 o 0
p—1 r£
0 S-3
CO 0
• PH
o A r>> -1-3 P-l r-l a +3
in* 0 r—1
CO a a •V
o 3 o • I—1 a 0 -+-3 0 bO rH X 0 O cd .a 0 a -t-3
H 0 O -1-3
PCI ä
CM CM

^~^ o Ö £ o
• I—1 Oi +a -t-3 •f-H CO
1 >> T—(
CO PO o "eo 0 a u ?H
5^ CD ■a
e £ • r-l
rv J* £ Ö CO
CO o CD 0 o • !■* Ö •rt
O 1—4 t—1
CO
CM
o S3
CO a o
0 >
• iH
0 c$ CO
Ö 1-»» u 0 0
• 1-4 o +3 • 1-4
+3 •i-t Ö
3 ""o CD CO
c co
nst
r
03
>4r
a o CD bJO
cö
b0
O S-i
• i-H -K> +3
0)
CO CO • 1-1
a I—1
CO • 1—4 a <D g
o 5l ^ o CD -t-3
• 1—1 Ö hO u >> CO O 1—4
bJO o 1
1—4
CO CH
s 3 cö ,3 cö >> »1—1 :=? ^
$-4 0 O +2 "Ö bJO CO 0
1—4 CO Ö cd
CO •^7
Ü CD
Q
0
0 U
0 i—« CO CO CO
o CO o
• 1—t
CO CO Is
0 CO 1—1 Ö
Q o • i-H
CD CD ^1
CO
H H • i-H
O • • A
CO
CO CO 0 o O

CO
O Ö >>
I—I
o
o
o a>
o Ö o
♦ i-H
so O
5-1 so
CO
Ö 0 o CD
S-4
«s Ö o
• I—I
-8 u
3 co
-to CO
to CO J-
o
to
+ so
8 o
so
8 so
I
+ 8
8 SO
+ eo 8
SO
II II
8
8 so
eo 8
8 so
Ä, a, £^
CD -to
CO
O CÜ
CO
o 8 so
8 es
+ + 8 so
I
so CM
+ 8 so
8 o 8
so
SO
+ 8
8 so
r-l
a, so
8
8 o 8
SO
8 so
SO CM
+ CO
8 M SO
II II
8
8 so
r-l
SO
I
+ eo 8
8 so
rH
so
>i ii eo 8
8
8 so
CD -to
CO
"H
8
8 o 8 so
Ä so
eo 8
rv
8
8 so
OH SO
CO
8
8
8 o 8
SO
CO a,
o 8
eo so
^ 4- 8
SO
so eo +
es» 8 so
SO
+ eo 8
eo so
II II

ö o
• pH
cö u 0
p—I 0» ü Ü eö
-p • PH
0 o
p—I 0 >
P-H
cö Ö
CÖ
cd » »PH ». -p "
Ö
O
p-H
o PH
■s o o ä 0
-P 0
PÖ CO
Ö O
-P cd 0
« 8
eo
CO
8
II
CO
o 8
CO
II
eo 'ö,
8
8
8
eo 8
CD
II
Cö eo eo eo ö, "ö, :ö<
CO -R Ö •N
o 8
e* 8
8
N 8
CD
II
eo :Ö<
Ö o 0
PÖ -P
Ö
eo ft
o ft
CO U O -P o >
CN
Ö
eo
o 8
CO
■s •i—i
O a
CO
ö o
ö o u
H-3
0 K ö >
CQ CP
CÖ CO
•PH
■8 CO
+3 CÖ
pÖ -p
eo ö,
p-H
CÖ
O Ö
eo ft
eo •ft,
o ft
eo •ft,
eo 8
eo
o 8
Ü * O
eo Öi
eo ö,
P—I
CÖ
O ä >>
P—4
o
pO Ö ü 0
PÖ
ö
o
o ft
CO PH
O -P o
CP >
CM
Ö cö
eo 8 o 8
CQ
'S »PH
o a £L ö >
»PH
Ü
CO CP
cö CO
• PH
-P CÖ CO
+3 CÖ
PÖ +3
CO CP > PH
Ö ü CP fl
• PH P-H
A CO
-P ü
• Ö o PH
3 CO
II Ö O
^-^ o O o • eo H-3 :ö, CP
-p CÖ
• PH
ft" PH
II o PH
,—^ CU O a* ^—s cö eo •04 CP
PH
O • CO a 8 0 II
PH
CÖ
s—>, CO rH Ö
eo öi
O »PH
• PH
T5 ^* Ö O O 8 u
II CO cö
•""■"'s P-H
O 0 eo PÖ öi H
iß es

Q
tSJ
■a h CD a a» bD
03 CO a»
Ö CO u
"5
a) +3
T5 CD Ö
cß 0)
T5 CP
i-H
•§ • »-I
CO
CO • *H
CO CO a> Ü o u a Ö O
■s I—I o
■g • i-H
CO CD Ö
CO CP
■+3 • l-l
O
CO • i-H
rS
O FH 0)
O &
H
CD
CO cö
ä O
r—I
CO cö
CO
u a OH CO
a) -4-3 o o
+3
S

CO
O u bO
CD
Ö O
•i—i u o i—i
CO
CO
0
CO CO Ü 0 Q
CD N
• 1—1 r—I
cd
0 Ö 0
o
I
o
*0
C3 ft»
If
i
•<s>
"S3 CO
CO
o
CD
8 0 u 0
o
CD
8 o
-to
Ö,
8
CD
II li
8 0 u 0
8
CD
8
CD
II 8 0 u
. 0
8
CD
II II
8
8 •<o
8 es 8
a, ft
to CO
O
CO
1 | 1 1
^CD ^1-4
I* CD
3? <D
II II 3?
CD CD
0 U 0
0 u 0 ri
o 8
CD
5? CD
II M 8 r-l 8
rv o 8
a,
. 8
CD
CD
eo 8
8
8 -to CO
12
E-i
V*e
I
CD
eo.
CD
0 U 0
o 8
»"•es
CD
s? CD
CD
II eo 8
#■*
8 r-t
8 O 8
CO

o
cd SH CP
CD O O CO
eo 8
> O u >>
• i-t O o CP
1—4
CO Ö
CO
I—H
cö •i-i
Ö • F-4
a cd CO
■s ♦I-I
O Pi
.—I O u
■s o
Ö cp a» £ CP
a CO
ä o
CO
CP
i
eo 8
CO
eo 8
CO
e*
CO
II
to *T3
o 8
o
CO
o 8
fc>°
&
I o
CD
3
ö
<U
CO
a. CO
CO
•a.
X
3
-a Ö
o X cp u cp
ii
cö
rP CP b0
I—H
CO
cp
cp
o CO SH CP a o
"S
CO
• I—I
e
-a
o
-t-o
CD
CD
CD CO
Ö
•<s> CO CO Ü
CD
-to
CO Ö CD
Ö CO
CD
-*5
CO •<s>
CO
oo CM

s -p • PH
o bO
I-H CO
cö ;=?
-p I/} CO o Q
bO Ö
•i-i
■s 0>
CD I—4
CO 0
• I-I
i—I
o
•i-i
Ö •i—i
CO
CO
CD bO
i—«
cö CD
S-3
CO 0 Ü
?H
■s S Ö
• 1-4
'S • I-I
% CD Ö O
x
O u bO
CD
CD -a
CO 0 ü
•i—i
?H
•s
O CO
S-» • 1-4
u a bJO o
1—4
bJO Ö
• 1-4
ö •i—i
cö • 1-4
■s 0 Ö o
0
0
■+»
S-l
=2 CO CO
PH
=2 • i-4
CD •i—i i—i a x 0
0
CO
0 u 0
+3
o CO
o bO
ä o
• 1-4
CO
o
0 PS
PQ
0 Ö
0 T5
13
PH
-p» 0
CO
0 p*
CO
0 PS -P
CO 0
O ä 0
CO
a» a
CO
pa -1-3 ♦ I—t
PH
bO O
1—4
0
Ö cö
0
0
-p 0
O
CO CO O u o 0
Xi -p
X "d a cö
• pH
CO PH
O
Ü 0 >
T5 Ö cö
=2
X Ö
II Ö
CO
.o
CO
ST»
O PS
N 8
CO O CD
8
+ ä
CO
Ö Ö
•I-I CO
CN
8 bO O
a »IH
CO
+
CO O 0
ö CO
X 0
Ö 0
pa
CO
CO
8
o CO
<
U Ö I» so
<N
CO O O 0 u 0
PS

ö cö
CO Q) > S-4
cö • 1-4
a o ö
1—1
o
CP ü
o
o
o faß cd
3 • cd ■s
*T> 1-4 i—l
■+3 CO cö .
Q)
a cp
1—4
ü ft
Q) a • 1-4
Q o -4-5
CP r3 >> -+^> CO
cö *"* CP
CO CO »f-l
0 CO
CO CP ;> ;-!
o 3 6W o
^N CP o Ö
CO • 1—1 r—4
PH • CO
CO
CP e
1—1 o »—1
CP w 4J e cö •«o
CG R, CÖ CO
tw o o ?3
CO
Ö O
O e -^
CÖ -VO
s • ft S3 ö "^3
<! S3

CO
Ö
o
CO O a W) Ö S^
• 1-4
>> « -c>
3 0> o r!

o> ö •N
o> o rH
1
CO O
• PH
CO
II -to
a> a> N-"' -to H3 +z <D o CO ^ 0 rH
Ö bß 8
S3 p—» cp O
+3 ^o •+3 3 CH
s ©* s
II ^ o o •X •w
rfS o s—""' o +3 H-> ?3 CO S> >> Jj -t-3 o O • PH
i—H • PH
8
CO PQ
CO
0
CO
■s •i-i
CO 0 -a O
•+-» A 0
PS
CO
o CO CD
o -1-3
CO a • 1-4
i-H Ö o 0 •i-i
O
S S CO PS -|_3 PS
S-i • i-H -1-3 o PH
bO o £ p—H JH° CO
2 13 Ö CO 3 0
» cö o 0 » • I-I
CO +3
CO cd
0 CO
CP
Ü 0)
cö o
O CP faß
Q CD
Q CP
P3
0) 0 H N rS • ,.
• PH
0
-1-3
«TV
Ö • I-H
CP PH
CP p£
>>
Ö CO a CP >
•i—i 0 bO CO
Ü <! CP bO
• H-3 CO
♦i—i
8 ho 8 CO
O O
CO
8
CD
Ö • i-H
CO
Ö • PH
CO
o 8
Ö »PH
CO
Ö • I-H
CO
8 o
a,
8 ho
CO
O O
CP
cp PS
+
o co Ö o
CO CD
TJ O CP bO
CO
CM O
CP U CP
PS PH CO
0 P3
O
'S o Ö o
• i-H -1-3 cj 0
•'—> o PH
0 P3 -p3
CO
• i-H CO 0
H3 O 0 bO
CO
cö W-H
O
0 M 0
P£ PH CO
cö
IS PS
H 0 > 0
o pa -t-3
o CO
Ö u
-1-3
CO
Ö o
>
CO
Ö cö H
-t-3
CO •+3 O CO
+
o co
0 •4-3
a S o u 0
PO
o •H-3
0 0 ä
O co ä
• PH
CO
ä bJO O
P-H
TJ Ö cd CO
13 • PH
■s 0 Ö o
0 X
• PH
M -(-3
CO
r—I
Ö
o ► l-H
CO
ä 0
TJ
0
■s 0
0
co a 0 0
PO
ä cö CJ
CO 0 u 0
PCJ
CO
Ö O
PH
O
P^° 13
cd pi? 0
-r3 co cd Ü
0 Q 0
pd
O CO

O Ö
O
CO 0 ;-* d
■**
CO •
bJO a
•»■*
•+» CO a> ;-• 0
-+5 d
• !-t
0 rt H iH
0 CO
CO 1—*
CvJ 0 > 0 VH
N
CO s—^
0 CO CO . U CO
0 r—1 u
CO crt d Pu 0 CO
• >-H CO
d d 0 S
0 »I—1 1—1 o
0 d
+= d •t-t
0 ^ £ H o
^ CO
V>f .CA- ;»• r-cv i—■
7//IX 3 .•x/y &X yV)
v^v
mW
v»J —r—:—, X-—r-—'I
WvOv/ —t?—/ ^>i/
CN
ZZ rd
d 0
o
ZZ d o
"8 A 0
i—\ 0 Ü o CO ©
0 5 faß CvJ cö >
O
>
O iO <N
zz CN •
d o
\o •4-3
ZZ CO
0 ,d -P
i—1 0
ho o r-t o
CO
CÖ JÖ
d d o
©
CO CO
©
•+»
CO U
d ©
o
© bJO
u 0
15
CO CO

<•• _—•—•'•••••••••••«iL A •JVT'
^ö o a
• f!
Ö CO
0) 5-e CO
CO
Ö • l-l
O
i-H
o u Ö o o a)

1 >> 0 ♦ PH
s rO CO T5
CD ^0
ffi ft 0
"ft • i-H
CO u CD ä
>> > •i-i
^5 0 rH
ft
0 CD I-H
CO 0 CO
0 Ö l-H O
• i-H A A • rH •+» +3 O CO Ö CO • i-» 1^
• rH CO rH U CO ft CD
1—t > P—1 ,£ CD CO a 0
• 1-4
CO
ü cö >>
•
s ■s • l-H U >>
• rH rH
£ l-H CD o > l-H
CO O bO a Ö
o 3
Td l-H
cö >> • PH O 3
■8 -P
rH
ft cö
0 3 CO CD a ft CD
> -P
CO CO g CO 0)
T5 o ü o u
CO 0 >
0 CO
CD r£
0 Q
rH a +a 0 3 CO A ü CD
CD CO
-p
• ft -P.
bO Ö
• rH
a 3 O SH
cö • rH
> +3 0 +» bO
CO Ö • IH 13
0 a
CO CD 0
H3
r-^ o bO
l-H
CD • rH
t-3
0 O p"
CD CO a T5 A,
+3 3 CO
cö O
• i-H r£ 0
• lH 1—1
CD
rH
ft
o cö 0
l-H CD -P cö
0 CO
CO CO ft
CO CO rH
O
CO
O
CD
H
CO
ä cö
• rH
ä o
o CD
Q CD
^1
<2 >>
i-H
ä O
-P
r^ -P o
CO
• -p -M • 0
CO

a o
• I—I
i—-1
ü Ö o ü
CO 0 Ö
• l-H l—H
DH CO
O
>>
0
o CD bO CD
>>'
co
O •4-3
CO
Ö o co cd 0 JH
T5 O O Ü
tw o i O
co ft 3
o cd ft CO
•i—i
a cd
S 0 a 0 bO
• l-H
CO .a
^H a o 0 O • !-!
-+-»
!>> 13 . a T5 CO
a 0
• 1-4
0 0 3 0
rD bO CO
• i-t
bO O ■s o cd
0 • iH ü I—1
cd 0 ft ft cd
a •)»* l-H
a 0
+3 CD bo 0 a
a o
CO a a • I-l
T3 • 1—1
CO CD a -+-3 o a
CD
-s i-H
0 a • i-H
bO
cd
cd
+3
o ft
a 0
0 a 0 o a
CD b »F-4
'S a cd
.a H-3 •
co
cd
•i—i
cd a a
• i-H
o cd a 0
bJO ^ I—H a o a
a ♦ I—1
tS5 CO 0 U
0 s-l
• I—1 +3 a Ö 0 co CD
O cd o ^
O U CO
cd
o ft
■s >> CO
o ft a
Id a
• i-H
0 a
C+H J3 • l-H •+J CO
0 0 ft 0
a CD
3
a CO
I—1
cd
0
CO CD 0
•i—• CO
a
a cd
C+H
0 O
ft
• i—i
O CO 0 a
•i—t
"a
CO
a o
CD o o cd
•
• l-H
bO • l-H
f-1
CO
cd •
-+-3 CO
to CO