Embed Size (px)
Citation preview
Workflow based Slicer IGT Module : Tutorial
Andinet Enquobahrie, PhDKitware Inc
December, 2008
Purpose of the module
• Provide a generic workflow based wizard to be used as a framework for IGT applications development.
• Identify the major steps in IGT procedure and translate these steps into wizard interfaces.
Download and Build Instructions
1. Download the module source code – http://www.na-mic.org/Wiki/index.php/Image:SlicerIGTModule.tgz
2. Specify your Slicer3 build directory during CMake configuration
3. Build the module
If you have successfully build the module, then in the module subdirectory of your build, you should get a shared library for SlicerIGT module ( "IGT.dll" for windows or "libIGT.so" for Unix build.
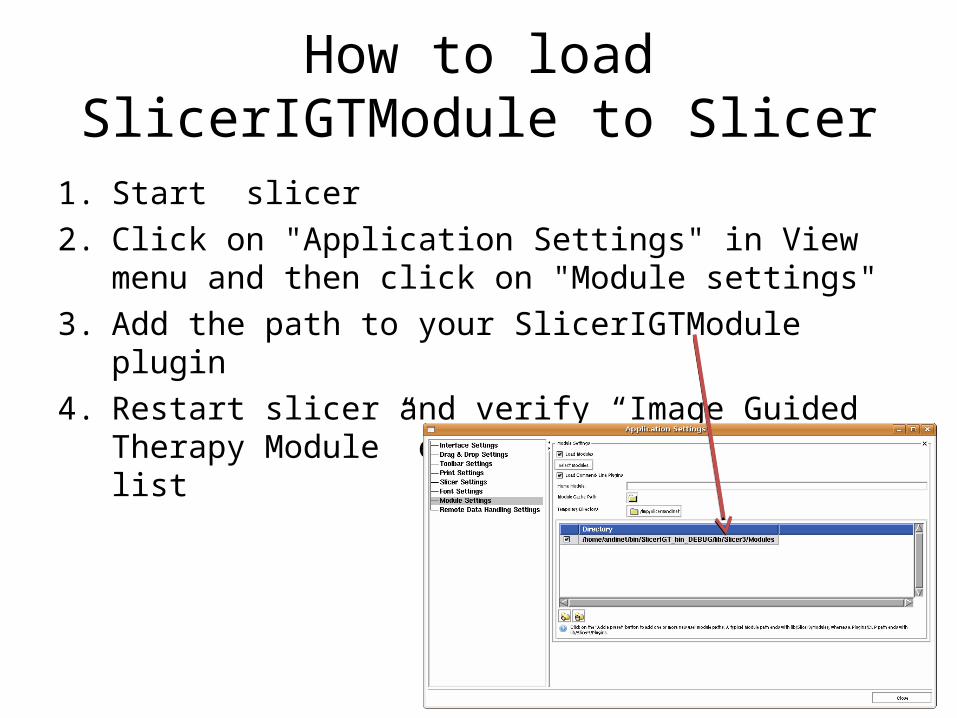
How to load SlicerIGTModule to Slicer
1. Start slicer2. Click on "Application Settings" in View menu and then click
on "Module settings" 3. Add the path to your SlicerIGTModule plugin4. Restart slicer and verify “Image Guided Therapy Module”
exists in the modules list
Load required Data for the IGT application
• Three types of data can be loaded 1. Preoperative Image Data2. Model Data for Surgical Tools3. Calibration Data
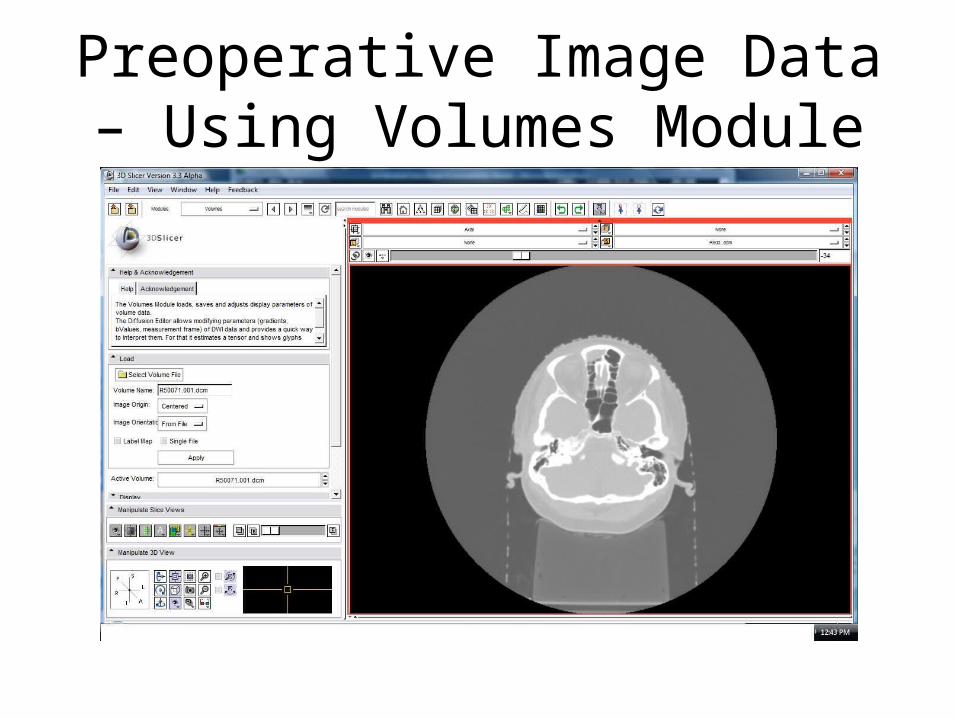
Preoperative Image Data – Using Volumes Module
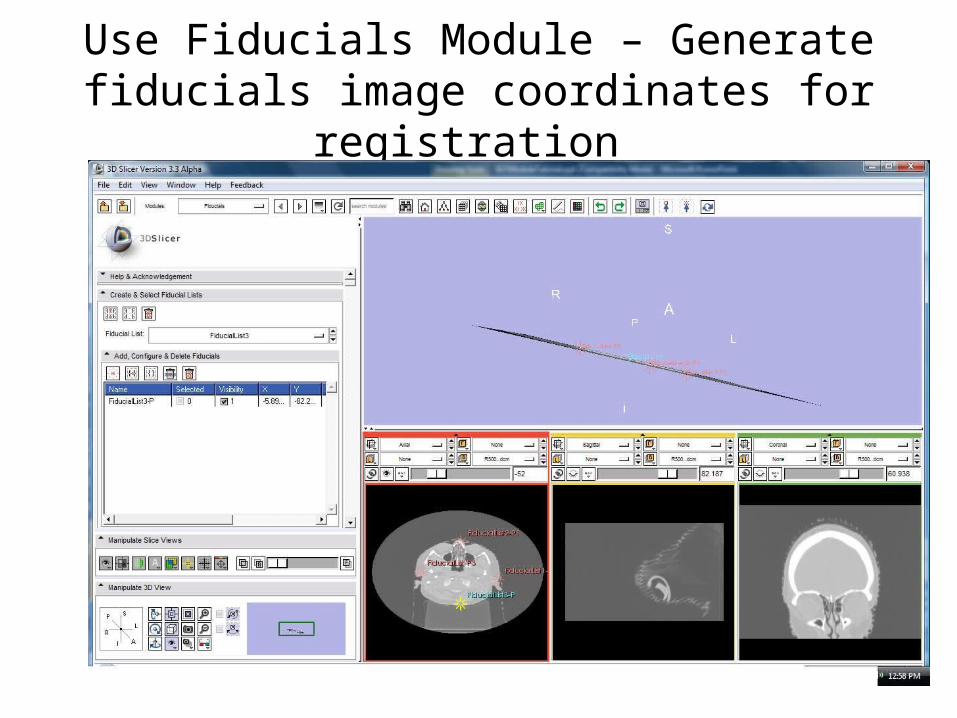
Use Fiducials Module – Generate fiducials image coordinates for registration
SlicerIGT Module Interface
Interface Design
• Five major steps1. Initialization2. Loading preoperative data3. Calibration4. Registration5. Intrapoperative procedure
• Designed using KWWidgets wizard
Step 1/5 Initialization
Initialization step includes establishing communication with• Navigation system and/or tracking device• Endoscope• External tracking software
– For example, setup communication with IGSTK using OpenIGT link
• Robot control computer if a robot is used in the surgical procedure.
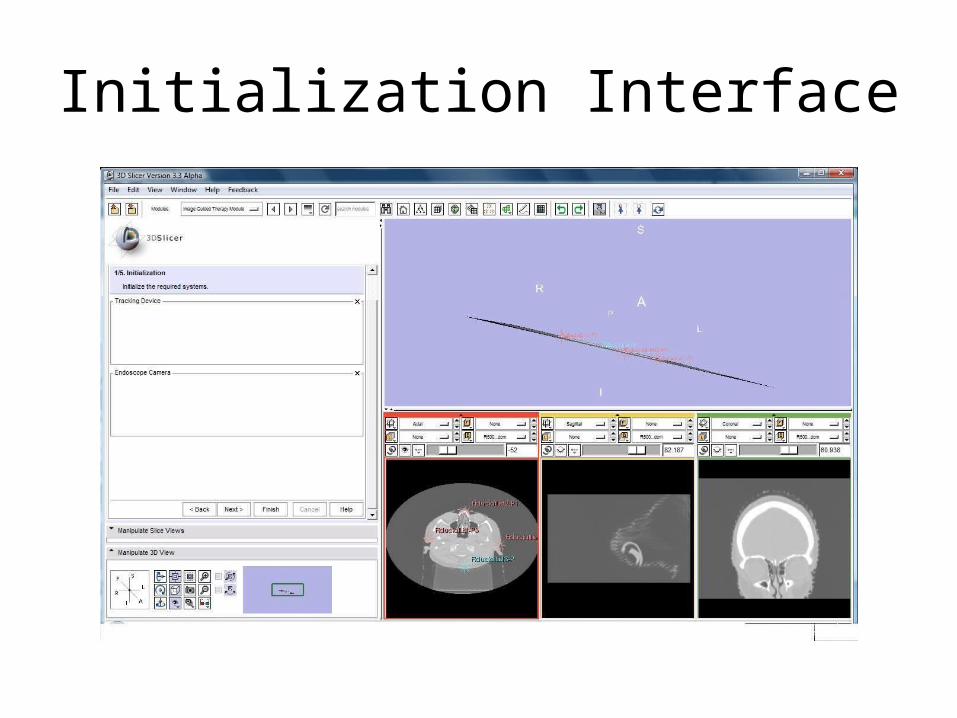
Initialization Interface
Step 2/5 Loading Preoperative Data
Preoperative data includes• Images ( such as CT, MRI data )• Models • Surgical planning ( developed preoperatively )
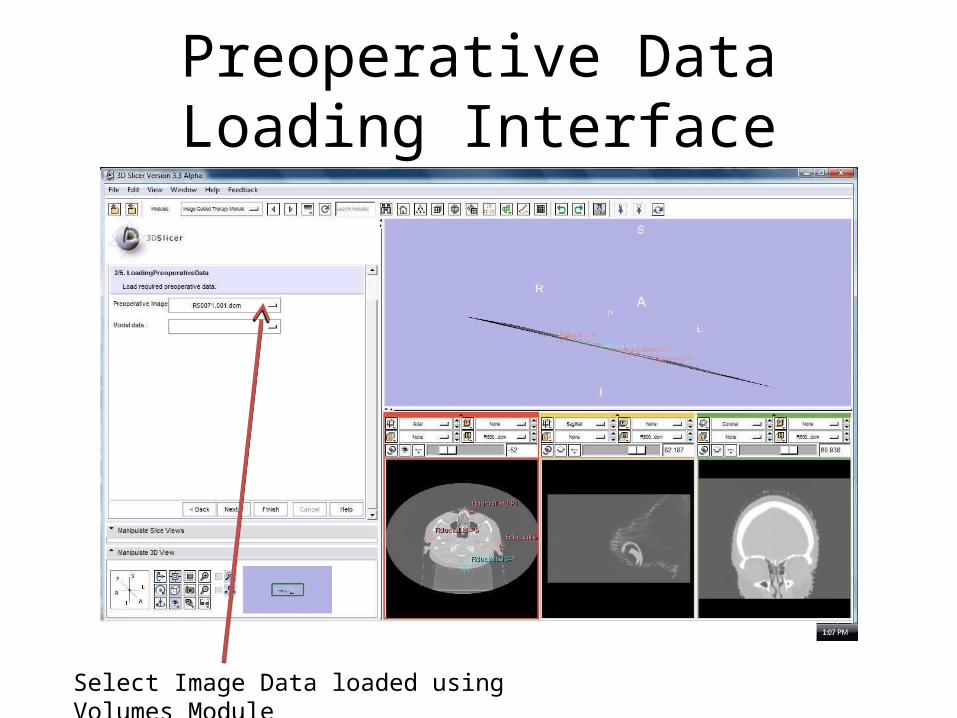
Preoperative Data Loading Interface
Select Image Data loaded using Volumes Module
Step 3/5 Calibration
• This step includes– Calibration of camera (Endoscope) and probe– Calibration of tracker tools
• For example, Pivot calibrations
– Calibration of robot tools
• Two options are available– Load precomputed calibration data– Run calibration algorithm
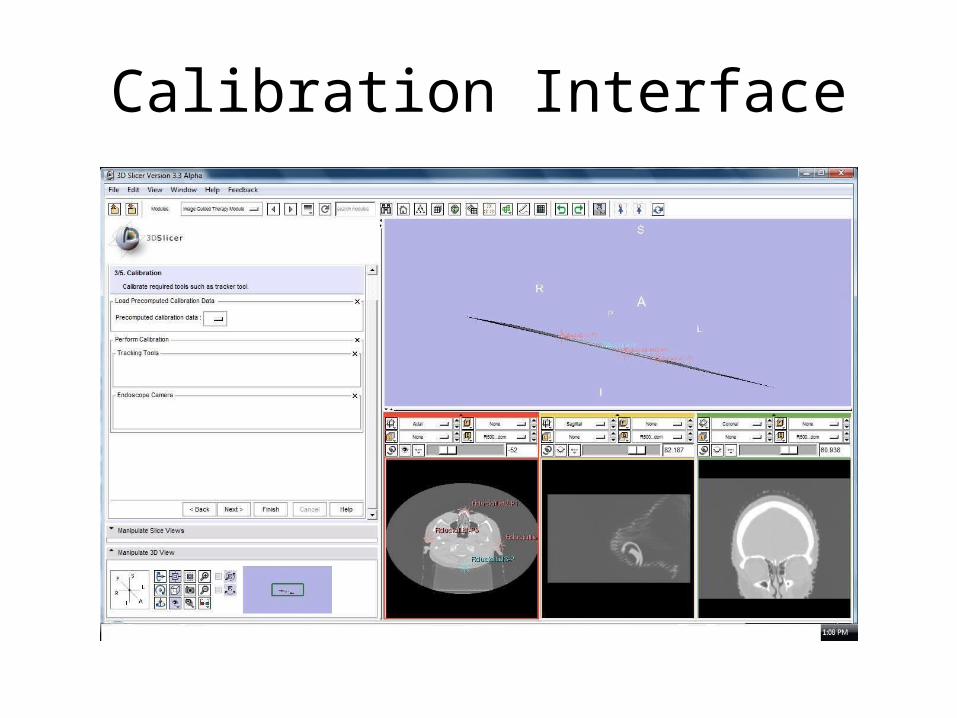
Calibration Interface
Step 4/5 Registration
In this step, transformations between different coordinate systems are established• Register preoperative image with the
navigation system’s reference frame ( i.e. Patient-Image registration )
• If robot is available, register robot coordinate system with the navigation system reference frame.
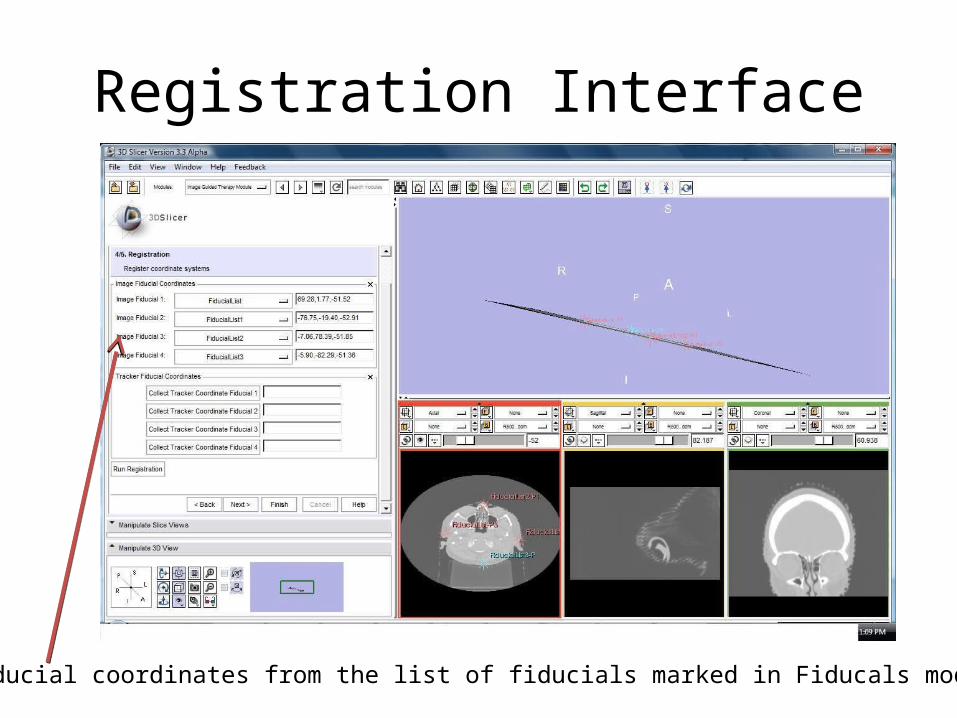
Registration Interface
Select fiducial coordinates from the list of fiducials marked in Fiducals module
Step 5/5 Intraoperative procedure
During the procedure– Start Tracking – If robot is available, transmit commands to robot
to get it to the right mode– Gather pose information of tracker/surgical tools
and update the display
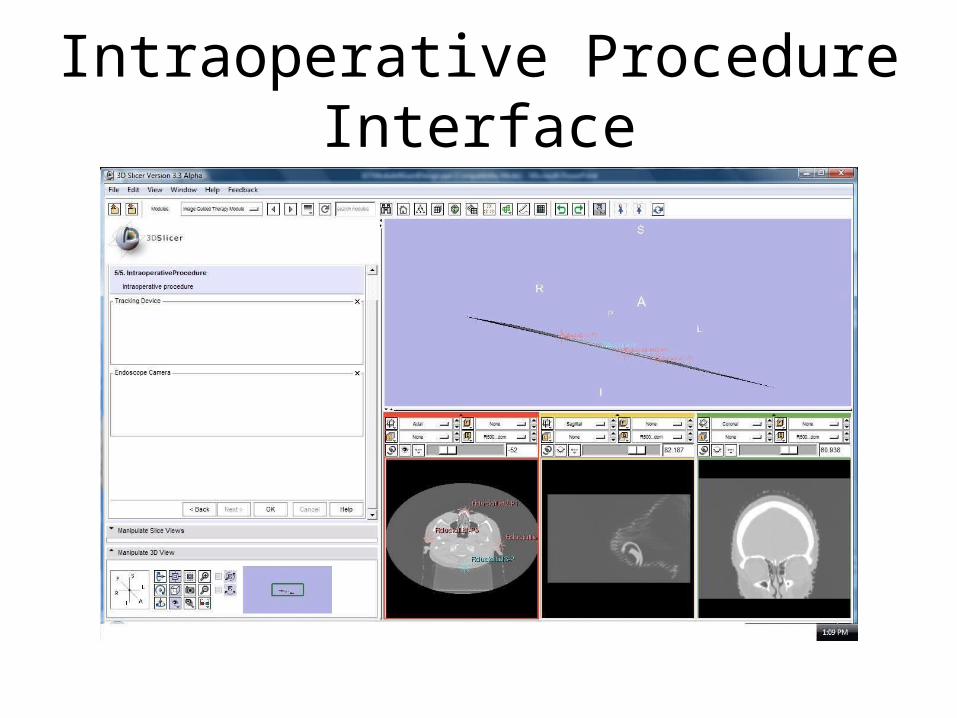
Intraoperative Procedure Interface
Summary
• Workflow based design streamlines application development
• IGT application developers fill in the SlicerIGT module steps with implementations specific to their application





























