-
7/29/2019 Wireless Automobile Monitoring System
1/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 1
Wireless Automobile
Monitoring System
[Vaibhav Tiwari, Tejaswini, Shiva Kumar, Tanuj ]
-
7/29/2019 Wireless Automobile Monitoring System
2/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 2
INTRODUCTION
-
7/29/2019 Wireless Automobile Monitoring System
3/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 3
Chapter 1
INTRODUCTION
1.1. General Introduction :
In this project, we present a wireless automobile monitoring
system using signals
transmitted by Zigbee, which is provided with lower power
consumption, small volume,
high expansion, stylization and two way transmission, etc.
Zigbee is generally used for
home care, digital home control, and industrial and security
control. We have developed
an automobile monitoring system by Zigbee characteristic, which
has embedded three
sensors, a temperature sensor, a float switch sensor and a water
sensor to send signals to
the actuators present at the receiver to carry out the required
action based on the signals
received from the transmitter of our automobile monitoring
system. An LCD screen
displays the temperature within the car and indicates the fuel
level. The automobile
monitoring system finds its application in cars and buses, by
making the system wireless
we reduce the complexity of connecting more wires as the number
of sensors increase.
1.2. Statement of Study:
The aim of the project is to design a system which can be used
for the purpose of
controlling and monitoring the devicesin automobiles like fuel
level, temperature, and air
conditioning.
1.3. Objectives of the study
The main objective of selecting this project is to gain
knowledge and experience in
developing a real time application. Apart from this, to gain the
knowledge of ATmega32
microcontroller, Zigbee technology and the way in which these
can be used for this
system. ATmega32 is a popular microcontroller. There are number
of AVR applications.
Microcontroller can be programmed to run only one specific
application. It can be
programmed to accomplish the specific job faster. Zigbee was
created to address the
market need for a cost-effective, standards-based wireless
networking solution that
-
7/29/2019 Wireless Automobile Monitoring System
4/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 4
supports low data-rates; low-power consumption-users expect
battery to last months to
years, security, and reliability. ZigBee is the only
standards-based technology that
addresses the unique needs of most remote monitoring and control
and sensory network
applications.
1.4 Methodology
Software Process:
The software process is the set of activities and associated
results, which produced a
software product.
Example: Waterfall process model, Spiral model and Evolutionary
model.
The Waterfall process model has been followed for the
development of this project.
This model is the one of the best process models. There are
several variations of this
model.
This process is best only when all the requirements are known in
advance. This process is
easy to understand by system developers as well as users. And
this process model is more
visible, as it produces deliverables at the end of end
phase.
Visibility is one of the process characteristics that are looked
for by project managers
while selecting a process model for any project.
Figure 1.1 Waterfall process model
Implementation
Testing
Design
Analysis
-
7/29/2019 Wireless Automobile Monitoring System
5/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 5
The waterfall process model has five phases. They are as given
below:
(1) Analysis
The systems services, constraints and goals are established by
consultation with systemusers.
(2) Design
The systems design process partitions the requirements to either
hardware or software
systems. It establishes overall system architecture. Software
design involves representing
the software system functions in a form that may be transformed
into one or more
executable programs.
(3) Implementation
During this stage, the software design is realized as a set of
programs or program units.
(4) Testing
The individual program units or programs are tested. Then they
are integrated and tested
as a complete system to ensure that the software requirements
have been met. After
testing, the software system is delivered to the customer.
-
7/29/2019 Wireless Automobile Monitoring System
6/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 6
DESIGN
CONSIDERATIONS
-
7/29/2019 Wireless Automobile Monitoring System
7/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 7
Chapter 2
DESIGN CONSIDERATIONS
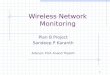
2.1. Block Diagram:
Transmitter Receiver
Figure 2.1 Block diagram of proposed system
ATMEGA32 ATMEGA32
POWER SUPPLY
WINDOW
SWITCH
BUTTONS
AC Control
Relays
LCD
TEMPERATURE
SENSOR
POWER SUPPLY
FLOAT SWITCH1
FLOAT SWITCH2
FLOAT SWITCH3
ZIGBEE ZIGBEE
Water Sensor
DC Motor
-
7/29/2019 Wireless Automobile Monitoring System
8/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 8
2.2 Description
The microcontroller ATmega32 is the heart of the system which
monitors all the
components. The power supply is used to energies the whole
module. The power supply
can be in the form of wired or battery. In our project 12V
battery is used as a power
supply. In this project we are implementing different features
of automobiles. We are
implementing two Zigbee nodes. One node will continuously check
the status of the
sensors and will send a command to another node to activate the
required actuator based
on the signals received. The status of the system will be
displayed on the LCD.
Transmitter:
The transmitter consists of the microcontroller ATmega32.The
transmitter is connected to
the window switch buttons which indicate whether the window is
closed or open. Three
float sensors are connected to the transmitter to indicate 3
different levels of fuel in the
tank. A temperature sensor indicates the temperature within the
automobile. The
transmitter is connected to a Zigbee module that transmits the
data to the receiver
microcontroller.
Receiver:
The receiver consists of the microcontroller ATmega32.The
receiver is connected to a
Zigbee module that receives information signals sent from the
transmitter
microcontroller. If all the switches are closed and the
temperature read from the
temperature sensor is above the predefined level, the receiver
activates the fan. The
signals sent regarding the positions of the float switch is
indicated on the LCD screen.
When water falls on the water sensor, the DC motor connected to
the wiper starts making
sweeps automatically.
-
7/29/2019 Wireless Automobile Monitoring System
9/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 9
HARDWARE
COMPONENTS
-
7/29/2019 Wireless Automobile Monitoring System
10/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 10
Chapter 3
HARDWARE COMPONENTS
The hardware components used in our project is listed below.
1. ATmega32 microcontroller
2. Power Supply
3. Relay
4. LM7805cV (Regulator)
5. Crystal Oscillator 4MHz
6. Zigbee Module
7. Temperature sensor LM35
8. Float Switch
9. Water sensor
3.1 ATmega32 microcontroller
The microcontroller is at the core of every embedded module.
Hence, great care must be
exercised in choosing the right microcontroller without
compromising on functionality.
Keeping in view many factors that governed the correct
implementation of our project the
ATmega32 microcontroller from Atmel Corporations AVR
microcontroller family was
chosen. Few crucial reasons may be cited so as to justify our
choice of this
microcontroller. The first being, that all AVR microcontrollers
are designed to deliver
more performance at lesser power consumption. It is compatible
with popular protocols
like I2C and SPI. It also has advanced features like an on chip
analog to digital converter,
six pulse width modulation channels, and data retention is
supported up to a hundred
years at 25 C. Also compilers for the ATmega32 are available
free of cost from the
manufacturer. An added advantage is that the AVR series can be
programmed using the
AVRGCC (GNU C compiler), thus making it an undisputed choice for
even GNU/Linux
-
7/29/2019 Wireless Automobile Monitoring System
11/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 11
based programmers. The Atmega48 microcontroller has execution
speeds of up to one
MIPS per MHz of clock frequency. Elucidating the specifications
of the CPU of the
AVR, it is an 8 bit microcontroller with advanced RISC
architecture. The CPU is
designed for the stellar combination of parallelism and
performance. Thus the CPU uses
the Harvard architecture (separate memories and buses for
program and data). The CPU
also accommodates a 32 general purpose 8-bit registers.
3.1.1 Architecture
The ATmega32 is a low-power CMOS 8-bit microcontroller based on
the AVR enhanced
RISC architecture. By executing powerful instructions in a
single clock cycle, the
ATmega32 achieves throughputs approaching 1 MIPS per MHz
allowing the system
designer to optimize power consumption versus processing speed.
The AVR core
combines a rich instruction set with 32 general purpose working
registers. All the 32
registers are directly connected to the Arithmetic Logic Unit
(ALU), allowing two
independent registers to be accessed in one single instruction
executed in one clock cycle.
The resulting architecture is more code efficient while
achieving throughputs up to ten
times faster than conventional CISC microcontrollers. The
architectural block diagram isas shown in the next page.
-
7/29/2019 Wireless Automobile Monitoring System
12/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 12
Figure 3.1: Architectural Block Diagram of ATmega 32
3.1.2 AVR CPU Core
This section discusses the AVR core architecture in general. The
main function of the
CPU core is to ensure correct program execution. The CPU must
therefore be able to
access memories, perform calculations, control peripherals, and
handle interrupts.
In order to maximize performance and parallelism, the AVR uses
Harvard architecture
with separate memories and buses for program and data.
Instructions in the program
memory are executed with a single level pipelining. While one
instruction is being
executed, the next instruction is pre-fetched from the program
memory. This concept
enables instructions to be executed in every clock cycle. The
program memory is In-
System Reprogrammable Flash memory.
The fast-access Register File contains 32 x 8-bit general
purpose working registers with a
single clock cycle access time. This allows single-cycle
Arithmetic Logic Unit (ALU)
operation. In a typical ALU operation, two operands are output
from the Register File, the
operation is executed, and the result is stored back in the
Register Filein one clock
-
7/29/2019 Wireless Automobile Monitoring System
13/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 13
cycle. Six of the 32 registers can be used as three 16-bit
indirect addresses register
pointers for Data Space addressingenabling efficient address
calculations. One of these
address pointers can also be used as an address pointer for look
up tables in Flash
program memory. These added function registers are the 16-bit
X-, Y-, and Z-register,
described later in this section.
Program flow is provided by conditional and unconditional jump
and call instructions,
able to directly address the whole address space. Most AVR
instructions have a single 16-
bit word format. Every program memory address contains a 16- or
32-bit instruction. The
Block Diagram of the AVR Architecture is as shown below:
Figure 3.2: Block diagram of the AVR central processing unit
-
7/29/2019 Wireless Automobile Monitoring System
14/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 14
3.1.3 Pin Configurations
Figure 3.3: Pin configuration of the ATmega32
microcontroller
3.1.3.1: VCCDigital supply voltage
3.1.3.2: GNDGround
3.1.3.3: Port B (PB7:0) XTAL1/XTAL2/TOSC1/TOSC2-Port B is an 8
bit bi-directional
I/O port with internal pull-up resistors. Alternate functions of
the pins of Port B are
functions related to SPI and the Pin Change Interrupt or
PCINT.
3.1.3.4: Port C (PC6:0)-Port C is a 7-bit bi directional I/O
port, with the PC6 pin being
used as a reset pin if the reset disable fuse (RSTDISBL) is not
programmed. If PC6 is
used as a reset pin, then a low level lasting for more than 2.5
s at that pin will generate
the required reset condition. The alternate function for the
pins of this port is that they act
as ADC input channels used here with the thermistor to aid in
temperature measurements.
3.1.3.5: Port D (PD7:0)- Port D is an 8-bit bi directional I/O
port and even its pins, like
those of port B and C have alternate functions. The pins of port
D can also serve as
-
7/29/2019 Wireless Automobile Monitoring System
15/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 15
transmitter and receiver pins for the internal USART of the
microcontroller, they can also
add up as comparator inputs to the internal comparator circuit
of the microcontroller.
3.1.3.6: AVCC-It is the supply voltage for the ADC, PC3 to PC0
and ADC 7:6. It is
externally connected to VCC and if the ADC is used it is
connected to the VCC supply
voltage through a low pass filter.
3.1.3.7: AREF-It is the analog reference pin for the ADC.
3.1.4 Features
High Performance, Low Power AVR 8-Bit Microcontroller Advanced
RISC Architecture
131 Powerful InstructionsMost Single Clock Cycle Execution
32 x 8 General Purpose Working Registers
Fully Static Operation
Up to 20 MIPS Throughput at 20 MHz
Non-volatile Program and Data Memories
4/8/16K Bytes of In-System Self-Programmable Flash
(ATmega48/88/32)
Endurance: 10,000 Write/Erase Cycles
Optional Boot Code Section with Independent Lock Bits
In-System Programming by On-chip Boot Program
True Read-While-Write Operation
256/512/512 Bytes EEPROM (ATmega48/88/32)
Endurance: 100,000 Write/Erase Cycles
512/1K/1K Byte Internal SRAM (ATmega48/88/32)
Programming Lock for Software Security
Peripheral Features
Two 8-bit Timer/Counters with Separate Prescaler and Compare
Mode
One 16-bit Timer/Counter with Separate Prescaler, Compare Mode,
and Capture
Mode.
Real Time Counter with Separate Oscillator
Six PWM Channels
8-channel 10-bit ADC in TQFP and MLF package
-
7/29/2019 Wireless Automobile Monitoring System
16/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 16
6-channel 10-bit ADC in PDIP Package
Programmable Serial USART
Master/Slave SPI Serial Interface
Programmable Watchdog Timer with Separate On-chip Oscillator
Special Microcontroller Features
Power-on Reset and Programmable Brown-out Detection
Internal Calibrated Oscillator
External and Internal Interrupt Sources
Five Sleep Modes: Idle, ADC Noise Reduction, Power-save,
Power-down, and
Standby
I/O and Packages
23 Programmable I/O Lines
28-pin PDIP, 32-lead TQFP and 32-pad MLF
Operating Voltage:
1.8 - 5.5V for ATmega48V/88V/32V
2.7 - 5.5V for ATmega48/88/32
Temperature Range:
-40C to 85C
Speed Grade:
ATmega48V/88V/32V: 0 - 4 MHz
ATmega48/88/32: 0 - 10 MHz
Low Power Consumption
Active Mode:
1 MHz, 1.8V: 240A
32 kHz, 1.8V: 15A (including Oscillator)
Power-down Mode: 0.1A at 1.8V
3.1.5 Power modes
The Idle mode stops the CPU while the SRAM, Timer/Counters,
USART, 2-wire Serial
Interface, SPI port, and interrupt system continue to function.
In the Power-down mode,
the register contents are saved but the oscillator is frozen
until an interrupt is raised or the
hardware is reset. In the Power-save mode, the asynchronous
timer is running while the
-
7/29/2019 Wireless Automobile Monitoring System
17/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 17
remaining peripheral components of the device are sleeping. For
reduction of noise with
respect to the ADC, the CPU and all other I/O devices are halted
and only the
asynchronous timer along with the ADC is running the standby
mode can be useful for
quick start-ups. Power-down mode saves the register contents but
freezes the oscillator,
disabling all other chip functions until the next interrupt or
hardware reset, asynchronous
timer and ADC, to minimize switching noise during ADC
conversions. In Standby mode,
the crystal/resonator Oscillator is running while the rest of
the device is sleeping. This
allows very fast start-up combined with low power consumption.
Moving ahead, now a
brief discussion of the external interrupts has to be done.
3.1.6 Ports
The ports of the AVR have read-modify-write functionality when
used as general digital
I/O ports, as stated in the datasheet of the device. The ports
are bi-directional I/O ports
with optional internal pull-ups. Each port pin mainly has three
register bits which are
DDxn, PORTxn and PINxn. DDxn is the data direction bit and
indicates input or output at
a particular pin of any port.
If DDxn is set to one, the pin is used as output pin; else it is
an input pin. If PORTxn is
written to a logic one, and if DDxn is set to zero that
particular pins internal pull up
resistor is activated. The DDxn is accessed at the DDRx
register, the PORTxn is in the
PORTx register and the PINxn is at the PINx register. Writing a
logic one to PINxn will
toggle PORTxn. The alternate functions of the port pins and the
port registers are
explained at the end as part of the datasheets. The pin value
can be read at any time
through the PINxn register bit, irrespective of the DDxn pin
setting.
3.1.7 Analog to digital converter
The Atmega48 is equipped with a successive approximation analog
to digital converter
with a resolution of 10 bits. All the input channels of the ADC
are connected to a
multiplexer.
The ADC channel is selected by selecting the corresponding bits
as defined in the
ADMUX register of the microcontroller. The ADC output which is
10 bits long is stored
in the ADCH and ADCL registers of the microcontroller. For eight
bit precision, reading
ADCH is sufficient. Further details of the ADC are provided with
the datasheets.
-
7/29/2019 Wireless Automobile Monitoring System
18/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 18
3.1.8 USART
A universal asynchronous receiver/transmitter (usually
abbreviated UART and
pronounced is a type of "asynchronous receiver/transmitter", a
piece of computer
hardware that translates data between parallel and serial forms.
A UART is usually an
individual (or part of an) integrated circuit used for serial
communications over a
computer or peripheral device serial port.
Serial transmission of digital information (bits) through a
single wire or other
medium is much more cost effective than parallel transmission
through multiple wires. A
UART is used to convert the transmitted information between its
sequential and parallelform at each end of the link. Each UART
contains a shift register which is the
fundamental method of conversion between serial and parallel
forms.
The UART usually does not directly generate or receive the
external signals used
between different items of equipment. Typically, separate
interface devices are used to
convert the logic level signals of the UART to and from the
external signaling levels.
Communication may be "full duplex" (both send and receive at the
same time) or "half
duplex" (devices take turns transmitting and receiving).
3.1.8.1 Features
Asynchronous or Synchronous Operation
Full Duplex Operation (Independent Serial Receive and
Transmit
Registers)
Master or Slave Clocked Synchronous Operation High Resolution
Baud Rate Generator
Supports Serial Frames with 5, 6, 7, 8, or 9 Data Bits and 1 or
2 Stop Bits
Odd or Even Parity Generation and Parity Check Supported by
Hardware
Data Overrun Detection
Framing Error Detection
Noise Filtering Includes False Start Bit Detection and Digital
Low Pass
Filter
-
7/29/2019 Wireless Automobile Monitoring System
19/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 19
Three Separate Interrupts on TX Complete, TX Data Register
Empty
3.2 Power Supply
Power supply is used to energize the equipments such as
microcontroller, relay, level
converter, LCD and Zigbee module. The power supply is used to
energize the whole
module. The power supply can be in the form of wired or battery.
In our project 12V
battery is used as a power supply.
3.3 Relay
Relay is an electrically operated switch. Relays allow one
circuit to switch a
second circuit which can be completely separate from the first.
Relays can switch AC and
DC, transistors can only switch DC. Relays can switch higher
voltages than standard
transistors. Relays are often a better choice for switching
large currents (> 5A). Relays
can switch many contacts at once.
Figure 3.4: Relay symbol
Figure 3.5: Circuit diagram of relay
-
7/29/2019 Wireless Automobile Monitoring System
20/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 20
3.3.1 Advantages
Relays can switch AC and DC, transistors can only switch DC.
Relays can switch higher voltages than standard transistors.
Relays are often a better choice for switching large currents
(>5A).
Relays can switch many contacts at once.
3.3.2 Disadvantages
Relays are bulkier than transistors for switching small
currents.
Relays cannot switch rapidly (except reed relays), transistors
can switch many
times per second.
Relays use more power due to the current flowing through their
coil.
3.4LM7805C Voltage Regulator :
A voltage regulator based on an active device (such as a bipolar
junction
transistor, field effect transistor or vacuum tube) operating in
its "linear region" and
passive devices like zener diodes operated in their breakdown
region.
The regulating device is made to act like a variable resistor,
continuously
adjusting a voltage divider network to maintain a constant
output voltage.
-
7/29/2019 Wireless Automobile Monitoring System
21/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 21
Figure.3.6. Voltage Regulators
Figure 3.7: circuit diagram of voltage regulator
Linear regulators exist in two basic forms: series regulators
and shunt regulators.Series
regulators are the more common form. The series regulator works
by providing a path
from the supply voltage to the load through a variable
resistance (the main transistor is in
the "top half" of the voltage divider). The power dissipated by
the regulating device is
equal to the power supply output current times the voltage drop
in the regulating device.
-
7/29/2019 Wireless Automobile Monitoring System
22/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 22
The shunt regulator works by providing a path from the supply
voltage to ground
through a variable resistance (the main transistor is in the
"bottom half" of the voltage
divider). The current through the shunt regulator is diverted
away from the load and flows
uselessly to ground, making this form even less efficient than
the series regulator. It is,
however, simpler, sometimes consisting of just a
voltage-reference diode, and is used in
very low-powered circuits where the wasted current is too small
to be of concern. This
form is very common for voltage reference circuits.
The "78xx" series (7805, 7812, etc.) regulate positive voltages
while the "79xx" series
(7905, 7912, etc.) regulate negative voltages. Often, the last
two digits of the device
number are the output voltage; e.g., a 7805 is a +5 V regulator,
while a 7915 is a -15 V
regulator. The 78xx series ICs can supply up to 1.5 Amperes
depending on the model.
3.4.1 Features
1. 5V, 3V, and 3.3V versions available
2. High accuracy output voltage
3. Guaranteed 100mA output current
4. Extremely low quiescent current
5. Low dropout voltage
6. Extremely tight load and line regulation
7. Very low temperature coefficient
8. Use as Regulator or Reference
9.
Needs minimum capacitance for stability
10. Current and Thermal Limiting
11.Stable with low-ESR output capacitors (10m to 6)
3.4Crystal Oscillator - 4MHz :
A crystal oscillator is an electronic circuit that uses the
mechanical resonance of avibrating crystal of piezoelectric
material to create an electrical signal with a very precise
-
7/29/2019 Wireless Automobile Monitoring System
23/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 23
frequency. This frequency is commonly used to keep track of
time, to provide a stable
clock signal for digital integrated circuits, and to stabilize
frequencies for radio
transmitters and receivers.
The most common type of piezoelectric resonator used is the
quartz crystal, so oscillator
circuits designed around them were called "crystal oscillators.
A crystal is a solid in
which the constituent atoms, molecules, or ions are packed in a
regularly ordered,
repeating pattern extending in all three spatial dimensions.
Almost any object made of an elastic material could be used like
a crystal, with
appropriate transducers, since all objects have natural resonant
frequencies of vibration.
For example, steel is very elastic and has a high speed of
sound. It was often used in
mechanical filters before quartz. The resonant frequency depends
on size, shape,
elasticity, and the speed of sound in the material.
High-frequency crystals are typically
cut in the shape of a simple, rectangular plate. Low-frequency
crystals, such as those used
in digital watches, are typically cut in the shape of a tuning
fork. For applications not
needing very precise timing, a low-cost ceramic resonator is
often used in place of a
quartz crystal.
When the field is removed, the quartz will generate an electric
field as it returns to its
previous shape, and this can generate a voltage. The result is
that a quartz crystal behaves
like a circuit composed of an inductor, capacitor and resistor,
with a precise resonant
frequency.
Quartz has the further advantage that its elastic constants and
its size change in
such a way that the frequency dependence on temperature can be
very low. The specific
characteristics will depend on the mode of vibration and the
angle at which the quartz is
cut (relative to its crystallographic axes. Therefore, the
resonant frequency of the plate,
which depends on its size, will not change much, either. This
means that a quartz clock,
filter or oscillator will remain accurate. For critical
applications the quartz oscillator is
mounted in a temperature-controlled container, called a crystal
oven, and can also be
mounted on shock absorbers to prevent perturbation by external
mechanical vibrations.
Quartz timing crystals are manufactured for frequencies from a
few tens of kilohertz to
tens of megahertz. More than two billion (2109) crystals are
manufactured annually.
-
7/29/2019 Wireless Automobile Monitoring System
24/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 24
Most are small devices for consumer devices such as
wristwatches, clocks, radios,
computers, and cell phones. Quartz crystals are also found
inside test and measurement
equipment, such as counters, signal generators, and
oscilloscopes.
Figure 3.8: A Crystal Oscillator.
3.6 ZIGBEE (TRANSRECIEVER)
ZigBee was created to address the market need for a
cost-effective, standards-based
wireless networking solution that supports low data-rates,
low-power consumption-users
expect battery to last months to years, security, and
reliability. ZigBee is the only
standards-based technology that addresses the unique needs of
most remote monitoring
and control and sensory network applications.
The initial markets for the ZigBee Alliance include Consumer
Electronics, Energy
Management and Efficiency, Health Care, Home Automation,
Building Automation and
Industrial Automation.
It is wireless networking protocol aimed at automation and
remote control applications.
The Zigbee mesh network connects sensors and controllers without
being restricted by
distance or range limitations. ZigBee mesh networks let all
participating devices
communicate with one another, and act as repeaters transferring
data between devices.
These modules use the IEEE 802.15.4 networking protocol for fast
point-to-multipoint or
peer-to-peer networking. They are designed for high-throughput
applications requiring
low latency and predictable communication timing.
http://upload.wikimedia.org/wikipedia/commons/7/78/Crystal_oscillator_4MHz.jpg
-
7/29/2019 Wireless Automobile Monitoring System
25/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 25
Figure 3.9: Zigbee Module
Advantages:
Zigbee is a low-cost, low-power, wireless mesh networking
standard. First, the low cost
allows the technology to be widely deployed in wireless control
and monitoring
applications. Second, the low power-usage allows longer life
with smaller batteries.
Third, the mesh networking provides high reliability and more
extensive range.
3.7 Temperature Sensor LM35
Features
Calibrated directly in Celsius (Centigrade)
Linear + 10.0 mV/C scale factor
0.5C accuracy guarantee able (at +25C)
Rated for full -55 to +150C range Suitable for remote
applications
Low cost due to wafer-level trimming
Operates from 4 to 30 volts
Less than 60 A current drain
Low self-heating, 0.08C in still air
Low impedance output, 0.1 Ohm for 1 mA load
http://en.wikipedia.org/wiki/Wireless_mesh_networkhttp://en.wikipedia.org/wiki/Mesh_networkinghttp://en.wikipedia.org/wiki/Mesh_networkinghttp://en.wikipedia.org/wiki/Wireless_mesh_network
-
7/29/2019 Wireless Automobile Monitoring System
26/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 26
Description
The LM35 series are precision integrated-circuit temperature
sensors, whose output
voltage is linearly proportional to the Celsius (Centigrade)
temperature. The LM35 thus
has an advantage over linear temperature sensors calibrated in
Kelvin, as the user is not
required to subtract a large constant voltage from its output to
obtain convenient
Centigrade scaling. Low cost is assured by trimming and
calibration at the wafer level.
The LM35's low output impedance, linear output, and precise
inherent calibration make
interfacing to readout or control circuitry especially easy. It
can be used with single
power supplies, or with plus and minus supplies. As it draws
only 60 A from its supply,
it has very low self-heating, less than 0.1C in still air. The
LM35 is rated to operate over
a -55 to +150C temperature range.
Figure 3.10: Temperature Sensor LM35
3.8 Float Switch
Float switch is an electrical on-off switch which operate
automatically when the liquid
level goes up or down with respect to a specified level. The
signal thus available from the
float switch can be utilized for automatic control of pump or
allied elements like solenoid,
lamp, relays etc., these magnetic float switches are available
in a very wide range
according to operating and mounting methods to suit variety of
individual application.
These are rugged, accurate and reliable operation. These floats
are available in vertical
type, horizontal type in PVC, stainless steel, nylon material
depends on application. The
principle behind magnetic float sensors involves the opening or
closing of a mechanical
-
7/29/2019 Wireless Automobile Monitoring System
27/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 27
switch, either through direct contact with the switch, or
magnetic operation of a reed.
With magnetically actuated float sensors, switching occurs when
a permanent magnet
sealed inside a float rises or falls to the actuation level.
With a mechanically actuated
float, switching occurs as a result of the movement of a float
against a miniature (micro)
switch. The choice of float material is also influenced by
temperature-induced changes in
specific gravity and viscositychanges that directly affect
buoyancy.
Float-type sensors can be designed so that a shield protects the
float itself from turbulence
and wave motion. Float sensors operate well in a wide variety of
liquids, including
corrosives. When used for organic solvents, however, one will
need to verify that these
liquids are chemically compatible with the materials used to
construct the sensor.
Magnetic float switches are popular for simplicity,
dependability and low cost.
FEATURES
Leak proof body machined from bar stock
Choice of floats dependent on maximum pressure and
specific gravity
Weatherproof, designed to meet NEMA 4
Explosion-proof (listings included in specifications)
Installs directly and easily into tank with a thredolet or
flange
(see application drawings)
-
7/29/2019 Wireless Automobile Monitoring System
28/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 28
Electrical assembly can be easily replaced without removing
the unit from the installation so that the process does not
have
to be shut down.
Horizontal installation or optional top mount
verticalInstallation
APPLICATIONS
Direct pump control for maintaining level
Automatic tank dump operations
Control levels or provide alarms in sumps, scrubber systems,
hydro-pneumatic tanks, low pressure boilers
SPECIFICATIONS
Service: Liquids compatible with wetted materials.
Wetted Materials:
Float and Rod: 316 SS.
Body: Brass or 316 SS standard.
Magnet Keeper: 430 SS standard, 316 SS or Nickeloptional.
Temperature Limits: 4 to 275F (-20 to 135C) standard, MT high
temperature
option 400F (205C) [MT option not UL, CSA, ATEX, or SAA].
Pressure Limit: Brass body 1000 psig (69 bar), 316 SS body 2000
psig
(138 bar). Standard float rated 100 psig (6.9 bar).
3.9 Water SensorThe Water sensor module works by having a series
of exposed traces connected to ground
and interlaced between the grounded traces are the sensor
traces. The sensor traces have a
weak pull-up resistor of 1 M. The resistor will pull the sensor
trace value high until a
drop of water shorts the sensor trace to the grounded trace . In
our applications, when the
water sensor detects water it informs the microcontroller to
start the DC motor.
-
7/29/2019 Wireless Automobile Monitoring System
29/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 29
SOFTWARE
REQUIREMENTS
-
7/29/2019 Wireless Automobile Monitoring System
30/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 30
Chapter-4
SOFTWARE REQUIREMENTS
The software components used in our project is listed below.
1. CVAVR cross compiler
2. AVR studio programmer
3. Embedded C
4.1 Code Vision AVR Cross Compiler
1. CodeVisionAVR is a C cross-compiler, Integrated Development
Environment and
Automatic Program Generator designed for the Atmel AVR family
of
microcontrollers.
2. The program is designed to run under the Windows 95, 98, Me,
NT 4, 2000 and
XP operating systems.
3. The C cross-compiler implements nearly all the elements of
the ANSI C language,
as allowed by the AVR architecture, with some features added to
take advantage
of specificity of the AVR architecture and the embedded system
needs.
4.
The compiled COFF object files can be C source level debugged,
with variable
watching, using the Atmel AVR Studio debugger.
The Integrated Development Environment (IDE) has built-in AVR
Chip In-System
Programmer software that enables to automatically transfer of
the program to the
microcontroller chip after successful compilation/assembly. The
In-System Programmer
software is designed to work in conjunction with the Atmel
STK500/AVRISP/AVRProg
(AVR910 application note), Kanda Systems STK200+/300, Dontronics
DT006, Vogel
Elektronik VTEC-ISP, Futurlec JRAVR and MicroTronics
ATCPU/Mega2000
programmers/development boards. For debugging embedded systems,
which employ
serial communication, the IDE has a built-in Terminal. Besides
the standard C libraries,
the CodeVisionAVR C compiler has dedicated libraries for:
1. Alphanumeric LCD modules
2. Philips I2C bus
3. National Semiconductor LM75 Temperature Sensor
-
7/29/2019 Wireless Automobile Monitoring System
31/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 31
4. Philips PCF8563, PCF8583, Maxim/Dallas Semiconductor DS1302
and DS1307
Real Time Clocks
5. Maxim/Dallas Semiconductor 1 Wire protocol
6.
Maxim/Dallas Semiconductor DS1820, DS18S20, DS18B20 Temperature
Sensors7. Maxim/Dallas Semiconductor DS1621
Thermometer/Thermostat
8. Maxim/Dallas Semiconductor DS2430 and DS2433 EEPROMs
9. SPI
10.Power management
11.Delays
12.Gray code conversion
CodeVisionAVR also contains the CodeWizardAVR Automatic Program
Generator that
allows you to write, in a matter of minutes, all the code needed
for implementing the
following functions:
1. External memory access setup
2. Chip reset source identification
3. Input/Output Port initialization
4. External Interrupts initialization
5. Timers/Counters initialization
6. Watchdog Timer initialization
7. UART (USART) initialization and interrupt driven buffered
serial communication
8. Analog Comparator initialization
9. ADC initialization
10.SPI Interface initialization
11.Two Wire Interface initialization
12.
CAN Interface initialization
13.I2C Bus, LM75 Temperature Sensor, DS1621
Thermometer/Thermostat and
PCF8563, PCF8583, DS1302, DS1307 Real Time Clocks
initialization
14.1 Wire Bus and DS1820, DS18S20 Temperature Sensors
initialization
4.2 AVR Studio ProgrammerAVR Studio is an Integrated Development
Environment (IDE) for writing and
debugging AVR applications in Windows 9x/ME/NT/2000/XP/VISTA
environments.
-
7/29/2019 Wireless Automobile Monitoring System
32/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 32
AVR Studio provides a project management tool, source file
editor, simulator,
assembler and front-end for C/C++, programming, emulation and
on-chip debugging.
AVR Studio supports the complete range of ATMEL AVR tools and
each release willalways contain the latest updates for both the
tools and support of new AVR
devices.AVR Studio 4 has a modular architecture which allows
even more interaction
with 3rd party software vendors. GUI plug-ins and other modules
can be written and
hooked to the system.
4.3 Embedded C
Embedded C is extensive and contains many advanced concepts. The
range of modulescovers a full introduction to C, real-time and
embedded systems concepts through to the
design and implementation of real time embedded or standalone
systems based on real-
time operating systems and their device drivers. Real time Linux
(RTLinux) is used as an
example of such a system. The modules include an introduction to
the development of
Linux device drivers. Embedded C covers all of the important
features of the C language
as well as a good grounding in the principles and practices of
real-time systems
development including the POSIX threads (pthreads)
specification.
The design of the modules is intended to provide an excellent
working knowledge of the
C language and its application to serious real time or embedded
systems. Those wanting
in-depth training specifically on RTLinux or Linux kernel
internals should contact us to
discuss their requirements; this set of modules is geared more
towards providing the
groundwork for approaching those domains rather than as in-depth
training on a specific
approach. Embedded C contains essential information for anyone
developing embedded
systems such as microcontrollers, real-time control systems,
mobile device, PDAs andsimilar applications. This C course is based
on many years experience of teaching C,
extensive industrial programming experience and also
participation in the ANSI X3J11
and BSI standards bodies that produced the standard for C. We
focus on the needs of day-
to-day users of the language with the emphasis being on
practical use and delivery of
reliable software.
-
7/29/2019 Wireless Automobile Monitoring System
33/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 33
TESTING
-
7/29/2019 Wireless Automobile Monitoring System
34/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 34
Chapter-5
TESTING
5.1 INTRODUCTION
Figure 5.1: Testing process
The most important phase in developing any software is testing.
Before the
implementation of the package, testing has been carried out
thoroughly to illuminate any
bug, which may be present.
Types of testing:
The software testing of the package has been done in four
phases. These are Unit
Testing, Integration Testing , System Testing and Acceptance
Testing.
5.1.1Unit Testing
In Unit Testing every model was tested independent of the other
verified thatworking properly.
Unit testing focus verification efforts on the smallest unit of
the software design
in the model. To check, whether each model in the software works
properly. So that it
gives desired outputs to the given inputs .All the validation
and conditions are tested in
the model level. This project work contains two modules. Each of
the modules and sub-
modules are unit tested and the bugs were identified and
rectified.
-
7/29/2019 Wireless Automobile Monitoring System
35/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 35
5.1.2Integration Testing
Integration testing is done to verify if the package as a whole,
after the integration of
all the modules is working properly. This phase of testing is
mainly concerned withfinding out if the variables and data are
sending correctly from one module to another.
In order to conduct the said test, the active program is
compiled. This package has been
tested for various inputs. It was found that the package
performs its function to meet the
requirements.
5.1.3System Testing
System testing involves putting all the modules together and
checking the entire
software. It is useful in checking whether with the given input,
the desired output is got as
a result. System testing will be largely functional in
nature.
5.1.4Acceptance Testing
This is the final stage in the testing process. Before the
system is accepted for the
operational use it may reveal errors and omissions in the system
requirements definitions
because the real data exercises the system in different way from
the test data. Acceptancetesting may also reveal requirements
problem where the systems performance is
unacceptable.
Testing here is focused on the external behavior of the system
and the internal logic of
the program is not emphasized. In this stage of testing the
application was installed in the
system.
-
7/29/2019 Wireless Automobile Monitoring System
36/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 36
FINAL RESULT
-
7/29/2019 Wireless Automobile Monitoring System
37/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 37
Chapter-6
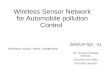
FINAL RESULTThe Automobile Monitoring System has been created
consisting of a Transmitter and a
Receiver, transmitting data via Zigbee. The temperature is
sensed continuously by the
temperature sensor ,while checking to see if the switches to the
windows are closed, if the
temperature exceeds a predefined value, the fan is actuated at
the receiver to be turned on.
Depending on the fuel level off the tank, the positions of the
float switches are compared
and the corresponding fuel level is indicated on the LCD at the
receiver. The water sensor
to be placed on the windscreen is connected to the receiver,
when water is sensed on the
water sensor the DC motor is actuated to move the wiper. Below
are photos of the actual
circuits implemented in our project.
Figure 6.1 Receiver
-
7/29/2019 Wireless Automobile Monitoring System
38/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 38
Figure 6.2 Transmitter
-
7/29/2019 Wireless Automobile Monitoring System
39/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 39
SNAP SHOTS
-
7/29/2019 Wireless Automobile Monitoring System
40/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 40
Chapter-7
SNAP SHOTS
FLOAT SWITCH
TEMPERATURE SENSOR
-
7/29/2019 Wireless Automobile Monitoring System
41/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 41
WATER SENSOR
ZIGBEE
-
7/29/2019 Wireless Automobile Monitoring System
42/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 42
TRANSMITTER
RECEIVER
-
7/29/2019 Wireless Automobile Monitoring System
43/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 43
FUTURE
ENCHANCEMENTS
-
7/29/2019 Wireless Automobile Monitoring System
44/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 44
Chapter-8
FUTURE ENHANCEMENTS
The following modifications can be made to present circuit,
which lead to still smarter
project.
1. The module can be equipped with a faster and more capable
microcontroller to
integrate control of many more devices at the same time.
2. Another further intended development is to introduce time
controlled devices
for better system performance.3. Voice alerts can be used to
indicate the various controlling of devices their
status of operation.
4. If the numbers of relays are increased from the current
relays, the number of
devices that can be controlled can also be increased.
5. The module can be equipped with other sensing equipment such
as light and
heat sensors, accelerometers, strain gauges etc to monitor other
real world
physical quantities.
6. Advanced AVR microcontrollers with bigger flash memories can
be used to
create an increased number of functions and programs for better
functionality
and for a user friendly interface.
7. We can include the touch sensors or pressure sensors in the
system so that the
security is provided whenever criminals try to break in.
-
7/29/2019 Wireless Automobile Monitoring System
45/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 45
CONCLUSION
-
7/29/2019 Wireless Automobile Monitoring System
46/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 46
Chapter-9
CONCLUSION
As the saying goes Necessity is the mother of all inventions, a
need for software
which would control process and devices was recognized. The
design approach used
here has given satisfactory results and the microcontroller is
sufficient for measuring
the required parameters. The power consumption has been kept as
low as possible and
the measurements made by the device are quite reliable.
Accordingly a highly
interactive user friendly module based embedded technology with
microcontrollers was
developed to solve the problem. The module which is developed
will make the job of
process easier. The user module has resulted in reducing work of
human also makes
more comfortable. The module is, therefore functioning as a very
good tool.
Incorporating the future enhancement as specified earlier would
make the software a
perfect tool, which would help the user. The fully automated
sensors help in increasing
human comfort. A limitation of this project is that Zigbee has a
limit range around 100
feet it cannot be controlled above this range.
-
7/29/2019 Wireless Automobile Monitoring System
47/48
Wireless Automobile Monitoring System
Department of ECE, PESIT 47
BIBLIOGRAPHY
-
7/29/2019 Wireless Automobile Monitoring System
48/48
Wireless Automobile Monitoring System
Chapter-10
BIBLIOGRAPHY
1. Rappaport,Wireless Communication,Prentice-Hall, 2002.2.
Muhammad Ali Mazidi and Janice Gillispie Mazidi, The
Microcontroller and
Embedded systems, Pearsons Education, 2003
3. David Tse and Pramod Viswanath., Fundamentals of
wirelesscommunicationCambridge University Press, 2005.
4. Joachim Tisal, The GSM Network: The GPRS Evolution: One Step
TowardsUMTS Wiley, John & Sons, May 2001.
5. Gunnar Heine, Matt Horrer GSM Networks: Protocols,
Terminology andImplementationArtech House, January 1999.
6. www.national.com/ds/lm/lm35.pdf
7. www.zigbee.org/en/documents/zigbeeoverview4.pdf
http://www.national.com/ds/lm/lm35.pdfhttp://www.zigbee.org/en/documents/zigbeeoverview4.pdfhttp://www.zigbee.org/en/documents/zigbeeoverview4.pdfhttp://www.zigbee.org/en/documents/zigbeeoverview4.pdfhttp://www.national.com/ds/lm/lm35.pdf