Embed Size (px)
Citation preview

Wideband Satellite Communication Effects a Change in Underwater Resources Exploration in Japan
Takeshi NAKATANI and Hiroshi YOSHIDAMarine Technology and Engineering CenterJAMSTEC
12th BroadSky Workshop, 20th Ka Conference, Salerno Italy, October 1, 2014

Manned Submersible Deep‐sea Drilling Vessel Earth Simulator
Global Change Earth’s Interior Dynamics Biogeosciences
Three Latest AUVs
OtohimeJinbei
Yumeiruka
Research
Sector
Engine
ering
Sector
Shinkai6500 Chikyu
We contribute to integrated understanding of the Earth’s system with world’s top-class facilities.
Kochi Institute for Core Sample Research HeadquartersMutsu Institute
for OceanographyYokohama Institutefor Earth Sciences
Global Oceanographic Data Center
Outline of JAMSTEC

Roles of JAMSTECRoles of JAMSTECResearch on Global Change
Undertaking the research on globalenvironmental change, and providingknowledge and information useful to find solutions to the global environmental problems.
Research on Earth Evolution
Elucidating the causes of natural disasters relating to the ocean, thereby contributing to the protection of the lives and property of the people from disasters.
Research on Biogeosciences
Enhancing knowledge and understanding of biosphere spreading to the ocean and extreme environmentby investigating dynamic Earth‐Life interactive systems and evolutionary history of life.
Technological Development
Developing innovative technology to promote marine research activities and find industrial applications, thereby contributing to improvement of the quality of life and establishment of a marine database.

Research Vessels in OperationResearch Vessels in Operation
R/V Natsushimain op. from 1981R/V Natsushimain op. from 1981
Length 67.4 mWidth 13.0 mDepth 6.3 m
Gross tons 1,738 ton
Length 67.4 mWidth 13.0 mDepth 6.3 m
Gross tons 1,738 ton
R/V Hakuhomaruin op. from 1989R/V Hakuhomaruin op. from 1989
Length 100.0 mWidth 16.2 mDepth 8.9 m
Gross tons 3,991 ton
Length 100.0 mWidth 16.2 mDepth 8.9 m
Gross tons 3,991 ton
R/V Kaiyoin op. from 1985
R/V Kaiyoin op. from 1985
Length 61.6 mWidth 28.0 mDepth 10.6 m
Gross tons 3,350 ton
Length 61.6 mWidth 28.0 mDepth 10.6 m
Gross tons 3,350 ton
R/V Yokosukain op. from 1990R/V Yokosuka
in op. from 1990
Length 105.2 mWidth 16.0 mDepth 7.3 m
Gross tons 4,439 ton
Length 105.2 mWidth 16.0 mDepth 7.3 m
Gross tons 4,439 ton
R/V Miraiin op. from 1997
R/V Miraiin op. from 1997
Length 128.0 mWidth 19.0 mDepth 13.2 m
Gross tons 8,687 ton
Length 128.0 mWidth 19.0 mDepth 13.2 m
Gross tons 8,687 ton
R/V Kaireiin op. from 1997
R/V Kaireiin op. from 1997
Length 106.0 mWidth 16.0 mDepth 7.3 m
Gross tons 4,517 ton
Length 106.0 mWidth 16.0 mDepth 7.3 m
Gross tons 4,517 ton
D/V Chikyuin op. from 2005
D/V Chikyuin op. from 2005
length 210.0 mwidth 38.0 mdepth 16.2 m
gross tons 56,752 ton
length 210.0 mwidth 38.0 mdepth 16.2 m
gross tons 56,752 ton
R/V Shinseimaruin op. from 2013R/V Shinseimaruin op. from 2013
Length 66.0 mWidth 13.0 mDepth 6.2 m
Gross tons 1,629 ton
Length 66.0 mWidth 13.0 mDepth 6.2 m
Gross tons 1,629 ton

5
length 2.6 moperation depth 1,000 mspeed max 3 kt
length 2.6 moperation depth 1,000 mspeed max 3 kt
Deep Sea Working AUV“OTOHIME”
Deep Sea Working AUV“OTOHIME”
length 3.0 moperation depth 3,000 mspeed max 3 kt
length 3.0 moperation depth 3,000 mspeed max 3 kt
3,000m Class ROV“HYPER-DOLPHIN”
3,000m Class ROV“HYPER-DOLPHIN”
length 5 moperation depth 3,000 mspeed max 3 kt
length 5 moperation depth 3,000 mspeed max 3 kt
Deep Sea Cruising AUV“YUMEIRUKA”
Deep Sea Cruising AUV“YUMEIRUKA”
length 4 moperation depth 3,000 mspeed max 3.6 kt
length 4 moperation depth 3,000 mspeed max 3.6 kt
Deep Sea Cruising AUV“JINBEI”
Deep Sea Cruising AUV“JINBEI”
Submersibles and Vehicles in OperationSubmersibles and Vehicles in Operation
length 10 moperation depth 3,500 mspeed max 4 kt
length 10 moperation depth 3,500 mspeed max 4 kt
Deep Sea Cruising AUV“URASHIMA”
Deep Sea Cruising AUV“URASHIMA”
length 5.2 moperation depth 7,000 mspeed -
length 5.2 moperation depth 7,000 mspeed -
7,000m Class ROV“KAIKO 7000-II”7,000m Class ROV“KAIKO 7000-II”
length 9.5 moperation depth 6,500 mspeed max 2.5 kt
length 9.5 moperation depth 6,500 mspeed max 2.5 kt
Manned ResearchSubmersible
“SHINKAI 6500”
Manned ResearchSubmersible
“SHINKAI 6500”
length 3.0 moperation depth 3,000 mspeed max 3 kt
length 3.0 moperation depth 3,000 mspeed max 3 kt
7,000m Class ROV“KAIKO MarkIV”7,000m Class ROV“KAIKO MarkIV”

Center for Deep Earth Exploration(CDEX)
Center for Earth Information Science and Technology (CEIST)
Marine Technology and Engineering Center (MARITEC)
We Have 3 Engineering Sections

Objectives of MARITEC
Management of Marine TechniciansTechnological development
Operation and maintenance of research vessels and deep ocean investigation system

主要目国際総トン数: 5,000トン程度全長:90m程度船幅:18m程度満載喫水:6m程度速力: 航海速力 12ノット(満載、シーマージン15%)
最大速力 15ノット以上(目標値)航行区域:遠洋区域(国際航海を含む)定員: 65名(船員:27名、研究員・その他:38名)
A New R/V is under developmentA New R/V is under development
8

What is Underwater Robot
9

Types of Underwater Robot
10
Vehicle Manned Remote control Autonomous
FamousRobot
UnderwaterVehicle
of JAMSTEC AUVShinkai 6500 ROV
APUFrom MATRIX From Terminator

The New Faces of The Robot Fleet
11
YUMEIRUKA
JINBEI
OTOHIME
4 m, 1.7 tonsStart in-house service in FY2016
2.6 m, 900 kgUnder development
In-house service is scheduled from April 2017
Next generation ROV3 meters, 6 tonsService is scheduled from April 2016

Underwater Robot UsageUnderwater Robot Usage
EEZ and Hydrothermal plumes
①Wide area survey for finding new area
②Detail survey in promising area
③Estimation quantity and Evaluation quality
Underwater resources exploration(Hydrothermal deposit and hiding inactive deposit)
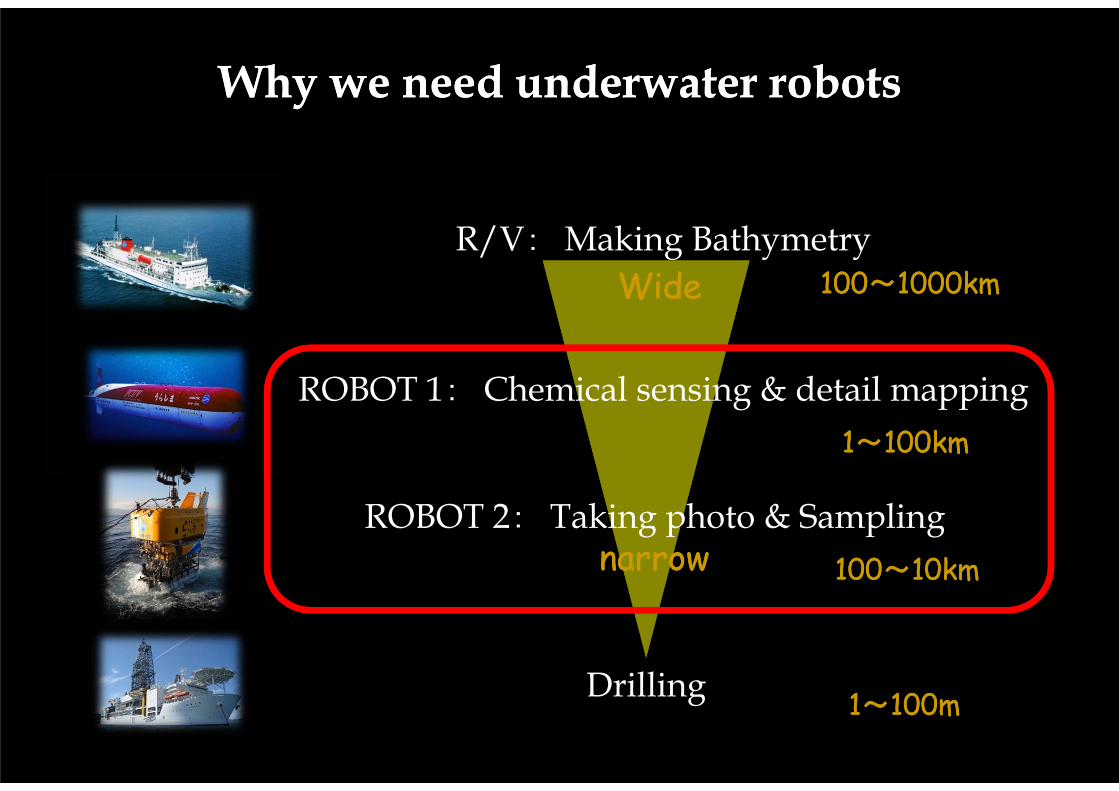
Why we need underwater robotsWhy we need underwater robots
R/V: Making Bathymetry
ROBOT 1: Chemical sensing & detail mapping
ROBOT 2: Taking photo & Sampling
Drilling
100~1000km100~1000km
1~100km1~100km
100~10km100~10km
1~100m1~100m
WideWide
narrownarrow

1) R/V1) R/V
2) AUV2) AUV 1 km
10 km• 研究船は広域観測できるがデータが粗い• AUVは高精細データが得られるが、探査時間を要す
る
1000
m
100m
100 times wider reseach area
Deference between ship and AUVDeference between ship and AUV

For Resources ExplorationFor Resources Exploration
EEZ and Hydrothermal plumes
Improvement in efficiency is required → Low cost exploration
If you use just one AUV for exploring in Japan’s EEZ, You need about 900 years!!
Multiple AUV operation
The step toward Multiple AUV operation
For Safe and Secure operation of robot,Communication network between robot and man is necessary
16
Technology of Autonomous Marine Platform(or Robot)
&
Marine Communication Technology (UW: Acoustic, Air: Satellite)

Important Technology for Marine Industries
17
Reduction of cost
Low-labor-cost = Robot
Eliminate mother ship = Control from a land with real-time communication
Speed, continuity, wider area = Multiple-robot system
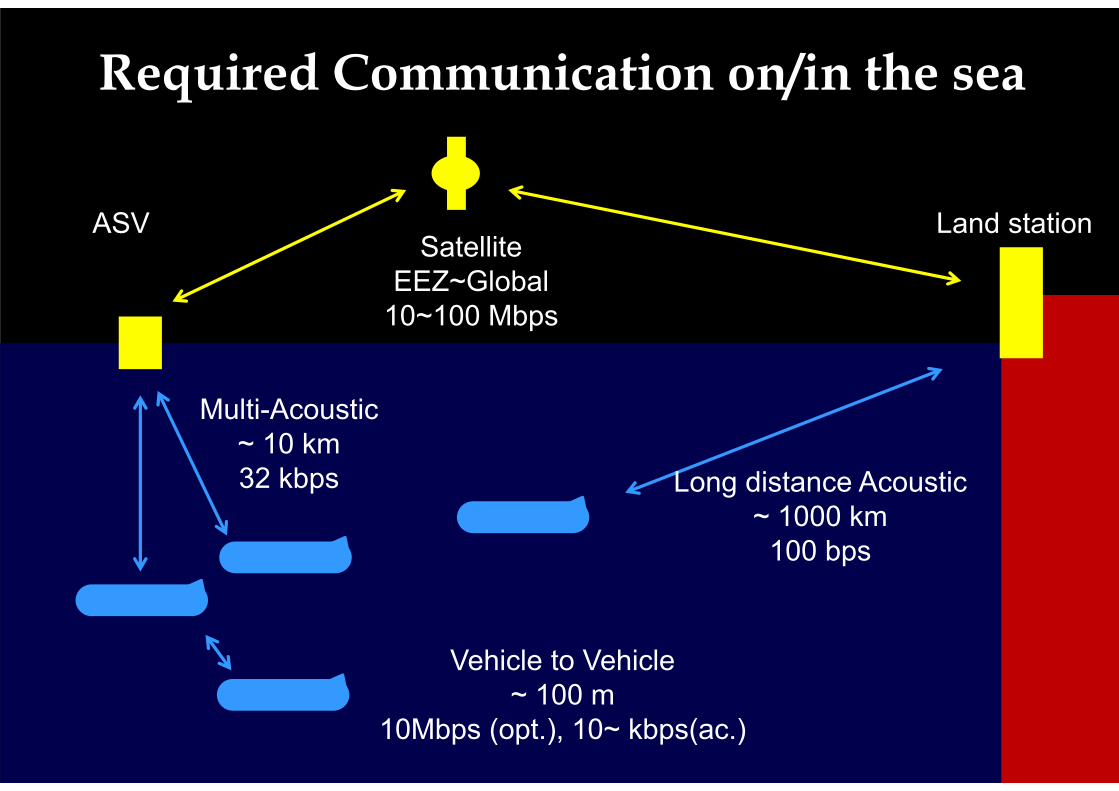
Required Communication on/in the sea
18
Long distance Acoustic~ 1000 km
100 bps
SatelliteEEZ~Global
10~100 Mbps
Multi-Acoustic~ 10 km32 kbps
Vehicle to Vehicle~ 100 m
10Mbps (opt.), 10~ kbps(ac.)
ASV Land station
Underwater Robot Development in JAMSTEC
19

20
Observation devices1. Multi-beam echo sounder: Seabat 71252. Side scan sonar: EdgeTech 2200 3. CTD: Seabird SBE494. DO: ALEC Elec. RINKO-III5. Turbidity – chlolophyll sensor: Wet labs FLNTU6. Hybrid ph-CO2 sensor (original)
Cruising speed: 0.7 ~ 3 knotsLength 4.0 m, Weight 1.7 tonsMaximum depth rating: 3,000 m
Cruising AUV “JINBEI”
X-rudder
Fixed Thrusters
Azimuthal rotation thrusters
Acoustic transducer
1.7 tons4 m

Side Scan Images
21
120 kHzALT 50m
400 kHzALT 50m
Methane hydrate mound and plume in Joetsu Knoll-Dive #5-
Waterfall image
Direction

Remote Control Trial via Geostationary Satellite: WINDS
Remote Control Trial via Geostationary Satellite: WINDS

Highly efficient operationusing a satellite
23

Digital divide on ship
24
Research ShipLand station
100 MBPSInternaet WWW
Wideband Satellite enables:• Data analysis on land (Up link)• Reference of cloud data (down link)
NOW:100 Kbps~ MbpsHigh speed network satellite

Realization of Telecontrol #1
25
Platform
Land
Sensors
Monitoring
NOW・~1kbps, Unidirectional
10k~10Mbps
Wideband Satellite enables:• Real-time deep-sea observation
from a land station

Realization of Telecontrol #2
26
Mother ship
Land
ROV
Real-time Monitoring
of the ROV data.
NOW• Only researcher on ship
can operate and observe
10M~100Mbps
Wideband Satellite enables:• Real-time deep-sea observation
from a land station

Multi-Robot Operation Plan in JAMSTEC
27
ASV
Support ship
Geo stationary satellite
SSBL Service area
We have developed a prototype of ASV and a multiple acoustic communication system since April 2013.

KEY TECHNOLOGY FOR TELECONTOL OF MARINE PLATFORM
1. Technology development of high-capacity communication satellite2. Technology development of small earth station:
- Small, Power saving, Self-recovery function, Tracking, Cooling
3. Technology development of surface vehicle for relay:- Small, Correcting of pitch and roll, Autonomous control, Collision acoidance
4. Technology of underwater acoustic communication:- Correcting of pitch and roll, Speed-up, Multiplexing
5. Technology of underwater platform:- High autonomy, Positioning, Large capacity energy
6. Compression technology for observation data7. Technology of recovery for time delay
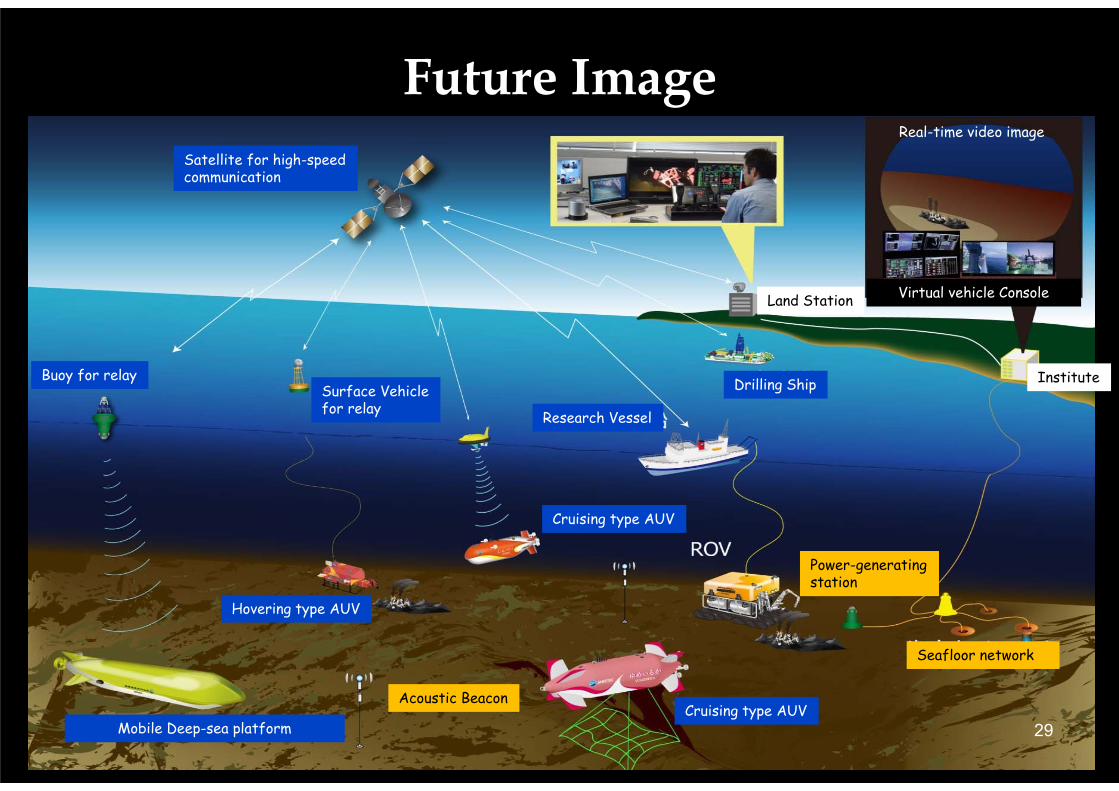
Future Image
29
Surface Vehiclefor relay
Buoy for relay
Satellite for high-speedcommunication
Drilling Ship Institute
Real-time video image
Land Station
Seafloor network
Research Vessel
Cruising type AUV
Cruising type AUVAcoustic Beacon
Hovering type AUV
Mobile Deep-sea platform
Power-generating station
Virtual vehicle Console

Time is Coming!The Dawn of Broadband
for Maritime and Underwater Communications
JAMSTEC Homepage: http://www.jamstec.go.jp/e/E-mail address : [email protected] END


























