Embed Size (px)
DESCRIPTION
introduction to control systems, how to derive systems
Citation preview

2015-03-25
1
SIGNALS AND CONTROL SIGNALS AND CONTROL SIGNALS AND CONTROL SIGNALS AND CONTROL SYSTEMSSYSTEMSSYSTEMSSYSTEMS
Week 7_2
Differential Equations of Physical Systems
Instructor : Dr. Raouf Fareh
2014/2015
1
Introduction to Linear Control
A control system is an interconnection of components forming a system configuration
that will provide a desired system response.
• The basis for analysis of a system is provided by linear system theory, which
assumes a cause-effect relationship for the components of a system.
• The process to be controlled can be represented by a block.
• The input/output relationship represent the cause and effect relationship of the
process
2

2015-03-25
2
Introduction to Linear Control
An open-loop control system utilizes an actuating device to control the process directly
without using feedback
A closed-loop control system uses a measurement of the output and feedback of
this signal to compare it with the desired output
3
Multivariable control system
4
Many complex engineering systems are equipped with several actuators that may influence theirstatic and dynamic behavior.
Systems with more than one actuating control input and more than one sensor output may beconsidered as multivariable systems or multi-input-multi-output (MIMO).
The control objective for multivariable systems is to obtain a desirable behavior of several outputvariables by simultaneously manipulating several input channels

2015-03-25
3
5
Six Step Approach to Dynamic System Problems
1. Define the system and its components
2. Formulate the mathematical model and list the
necessary assumptions
3. Write the differential equations describing the model
4. Solve the equations for the desired output variables
5. Examine the solutions and the assumptions
6. If necessary, reanalyze or redesign the system
Physical law of the process � Differential Equation
Mechanical system (Newton’s laws)
Electrical system (Kirchhoff’s laws)
How do we obtain the equations?
� Examples:
i.
ii.
6
Differential Equation of Physical Systems

2015-03-25
4
Differential Equation of Physical Systems
v21 Ltid
d⋅ E
1
2L⋅ i
2⋅
v211
k tFd
d⋅ E
1
2
F2
k⋅
ω211
k tTd
d⋅ E
1
2
T2
k⋅
P21 ItQd
d⋅ E
1
2I⋅ Q
2⋅
Electrical Inductance
Translational Spring
Rotational Spring
Fluid Inertia
Describing Equation Energy or Power
Inductive storage
Differential Equation of Physical Systems
Capacitive storage
Electrical Capacitance
Translational Mass
Rotational Mass
Fluid Capacitance
Thermal Capacitance
i Ctv 21
d
d⋅ E
1
2M⋅ v 21
2⋅
F Mtv 2
d
d⋅ E
1
2M⋅ v 2
2⋅
T Jtω 2
d
d⋅ E
1
2J⋅ ω 2
2⋅
Q CftP21
d
d⋅ E
1
2Cf⋅ P21
2⋅
q CttT2
d
d⋅ E C t T2⋅

2015-03-25
5
Differential Equation of Physical Systems
Electrical Resistance
Translational Damper
Rotational Damper
Fluid Resistance
Thermal Resistance
F b v21⋅ P b v212⋅
i1
Rv 21⋅ P
1
Rv21
2⋅
T b ω21⋅ P b ω212⋅
Q1
Rf
P21⋅ P1
Rf
P212⋅
q1
Rt
T21⋅ P1
Rt
T21⋅
Energy dissipators
Mechanical system: Spring-mass-damper
M2
ty t( )d
d
2⋅ b
ty t( )d
d⋅+ k y t( )⋅+ r t( )
where k is the spring constant of the ideal spring and b is the friction constant. This Equationis a second-order linear constant-coefficient differential equation
The net force applied to the mass m is � − �� − �� ; V: is the velocity. The net force is the force applied to the mass to cause it to accelerate thus: Newton’s law: net force applied to mass =ma

2015-03-25
6
Example
11
Electrical System Resistor–capacitor–inductor system
12

2015-03-25
7
Electrical and Mechanical Analogy
13
Force-Current Analogy
14
2015-03-25
8
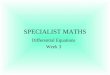
Example (Electrical)
The circuit shown in the figure consists of an inductor L, a capacitor C, and two resistors R and
Ro. The input is the voltage Vi(t) and the output is the voltage V0 across the resistor Ro.
Obtain two differential equations for the system in term of iL and Vc
For R = Ro = 1 Ω, L = 1 H, and C =1 F
15
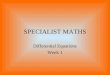
Solution
16

2015-03-25
9
Solution
17