Embed Size (px)
Citation preview

Walrasian General EquilibriumAllocations and Dynamics inTwo-Sector Growth Models
Bjarne S. Jensen*Copenhagen Business School
Abstract. This paper analyzes and solves miniature Walrasian general equili-brium systems of momentary and moving equilibria. The Walrasian frameworkencompasses the fundamental neoclassical and classical two-sector growth models;the families of solutions of steady-state and persistent growth per capita in variouscompetitive two-sector economies are parametrically characterized. Moreover, theendogenous behavior of relative prices and the sectoral allocation of primary factorsare analyzed in detail. The technology parameters of the capital good industry aredecisive for obtaining long-run per capita growth in closed (global) economies. Areview of the literature complements the theorems on the general equilibrium allo-cations, dynamic systems, and the time paths of Walrasian two-sector economies.
JEL classification: F11, F43, O40, O41.
Keywords: Multiple equilibria; causality; dual dynamics; capital goodindustry.
1. INTRODUCTION
The aim of pure theory and models is to deduce definite conclusions fromexplicit premises. In terms of theory construction, assumptions should befundamental (general), and from a technical (mathematical) point of view,they should be tractable. The concepts (terms and parameters) used in thetheory must be capable of exact interpretation and refer to observable facts asclosely as possible. Simplicity in the sense of generality and tractability hasalso motivated the research in economic growth theory. Great emphasis wasnaturally first given to labor and capital accumulation in aggregate (one-sector) growth models. In the endogenous growth literature, the scope ofaggregate models has recently been enlarged by increasing the number ofprimary factors, such as human and intangible capital (education, usableknowledge, learning by doing) as well as the number and quality of
r Verein fur Socialpolitik and Blackwell Publishing Ltd 2003, 9600 Garsington Road, Oxford OX4 2DQ, UKand 350 Main Street, Malden, MA 02148, USA.
German Economic Review 4(1): 53–87

intermediate inputs, through innovations. Although the new aggregategrowth models in the last decade have made valuable contributions in thetheory of economic development, it must be recognized that:
the importance of disaggregation calls into question the utility of research programsdirected at spelling out alternative mechanisms driving all of aggregate growth insingle-good models, as if relative prices and relative quantities of different productsdid not matter. Economists’ emphasis on single-good models is odd given thatthese models offer almost no scope for the relative price effects economists stress inmost contexts.
(De Long and Summers, 1991, p. 486)
An extensive literature on two(multi)-sector growth models, however,began in the 1960s, but debate and controversy reigned and still lingers. Theseminal work on two-sector growth models with flexible sector technologieswas done by Uzawa (1961–62, 1963), Inada (1963), and Drandakis (1963). Aframework for efficient factor allocation by using the price mechanism wasestablished in a ‘miniature Walrasian general equilibrium system’ (Solow,1961–62). But the theoretical and empirical relevance of various sufficientconditions for stability of steady states was deemed to be of modest value; cf.Hahn and Matthews (1964). In contrast to growth theory, the main interest ofinternational trade theory is directed to factor allocation, output composi-tion, and their dualities for commodity and factor prices; see Jones (1956),Kemp (1969), Dixit (1976), Dixit and Norman (1980) and Jensen and Wang(1980). A systematic and elegant treatment of the basic two-factor, two-sectorgeneral equilibrium model was given by Jones (1965), and the static generalequilibrium analysis was extended to growing two-sector economies, wheresome conditions for convergence to balanced growth were also examined.
Hahn (1965, p. 339) soon returned to the two-sector growth story andnoted that its connection with ordinary general equilibrium analysis had notbeen given the prominence it deserved; then he stated:
The story starts with a given stock of capital inherited from the past. Since there areconstant returns to scale we might just as well start with a given capital–labor ratio.The first question, familiar to general equilibrium theorists, is: does there exist amomentary equilibrium for any given capital–labor ratio? The second question asks: issuch an equilibrium unique? The answer to this is important for the simple reasonthat multiple momentary equilibria would make it impossible without furtherpostulates to predict the subsequent development of the system from the initialconditions. Supposing momentary equilibrium to be uniquely determined by thecapital–labor ratio we now ask: where is the system going? Here we want to knowwhether a steady state is approached or not. Answering this question involves anexamination of the existence of a steady state solution, possibly also the uniquenessof this and of course rather straight-forward stability analysis. The questions askedmay be answered in varying degrees of generality [italics ours].
Though these questions and the answers to them could seem straightfor-ward, the truth is that the issues indicated have dominated subsequent
B. S. Jensen
54 r Verein fur Socialpolitik and Blackwell Publishing Ltd 2003

research and are still not resolved. Our purpose is now to provide definiteanswers to these static and dynamic issues of existence, uniqueness, andstability. As we shall see, in solving even standard two-sector growth models,the uniqueness concept of static general equilibria is blurred and confoundedwith the uniqueness of general equilibrium dynamics (initial value prob-lems). An inconvenient or intractable choice of the state variable ingeneral equilibrium dynamics has created profound delusions about thecontinuous time solutions to basic neoclassical and classical two-sectorgrowth models. We shall mathematically eliminate the ‘causal indetermi-nancy’ problem.
As to both steady-state convergence or persistent (endogenous) per capitagrowth, the critical importance of technology parameters for the capital good(rather than consumer good) industry has been routinely missed. Moreover,the technological lack of generality in the widely adopted Inada (1963, 1964)conditions eventually impeded further advances in pure theory and reducedthe observable relevance of neoclassical and other growth models; cf. Aghionand Howitt (1998, p. 11). The main expositions and references to the earlytwo-sector growth literature are: Stiglitz and Uzawa (1969), Burmeister andDobell (1970), Wan (1971), and Gandolfo (1980, 1997). A newer treatmentwith an alternative population structure is Galor (1992). In this paper, the sizeof sectoral substitution elasticities (Arrow et al., 1961; Minhas, 1962) and ‘totalproductivity’ coefficients are among the key technology parameters.
The paper is organized such that Section 2 presents the structural equationsfor supply and demand and derives the timeless (static and comparativestatic) competitive general equilibrium solutions for all the variables ascomposite functions of the factor endowments. Section 3 analyzes thedynamic system and alternative evolutions of the two-sector generalequilibria.
2. GENERAL EQUILIBRIUM OF TWO-SECTOR ECONOMIES
2.1. Supply side
Consider an economy consisting of a capital good industry (sector) and aconsumer good industry, labeled 1 and 2, respectively. Sector technologies,Fi(Li, Ki), i51, 2, are described by non-negative smooth concave homoge-neous production functions with constant returns to scale in labor andcapital:
Yi ¼ FiðLi; KiÞ ¼ LiFið1; kiÞ � LifiðkiÞ � Liyi Li 6¼ 0 Fið0; 0Þ ¼ 0 ð1Þ
where the function fi(ki) is strictly concave and monotonically increasing inthe capital–labor ratio kiA[0, N[ , i.e. fi has the properties
8ki40: f 0i ðkiÞ ¼ dfiðkiÞ=dki40 f 00
i ðkiÞ ¼ d2fiðkiÞ=dk2i o0 ð2Þ
Walrasian General Equilibrium Allocations and Dynamics
r Verein fur Socialpolitik and Blackwell Publishing Ltd 2003 55

limki!0
f 0i ðkiÞ � bi 1 lim
ki!1f 0i ðkiÞ � b
i� 0 f 0
i ðkiÞ 2 Ji � ½bi; bi� ð3Þ
The sectoral output elasticities, eLi; eKi
; ei, with respect to marginal andproportional factor variation are, cf. (1),
eLi� EðYi; LiÞ �
@Yi
@Li
Li
Yi¼ MPLi
APLi
¼ 1 � kif0i ðkiÞ
fiðkiÞ40 ki 6¼ 0 ð4Þ
eKi� EðYi; KiÞ �
@Yi
@Ki
Ki
Yi¼ MPKi
APKi
¼ kif0i ðkiÞ
fiðkiÞ¼ Eðyi; kiÞ40 ð5Þ
ei � eLiþ eKi
¼ 1 ð6Þ
The factor endowments, total labor force (L) and the total capital stock (K ),are inelastically supplied and are fully employed (utilized), i.e.
L ¼ L1 þ L2 L1=L þ L2=L � lL1þ lL2
� l1 þ l2 � 1 ð7Þ
K ¼ K1 þ K2 K1=K þ K2=K � lK1þ lK2
� 1 ð8Þ
k � K=L � l1k1 þ l2k2 � k2 þ ðk1 � k2Þl1 ð9Þ
lL1� l1 � ðk � k2Þ=ðk1 � k2Þ lKi
� ðki=kÞli k1 6¼ k2 ð10Þ
The factor allocation fractions lLi; lKi
, (7–8), are related; cf. (10).At any point of the isoquants (1), the marginal rates of technical
substitution, oi(ki) are, by (2), positive monotonic functions:
oiðkiÞ ¼MPLi
MPKi
¼ fiðkiÞf 0i ðkiÞ
� ki ¼eLi
eKi
ki40 8ki40 ð11Þ
The general relation between the sectoral factor output elasticities, (4–5), andthe sectoral substitution elasticities between labor and capital, si, is:
EðeKi; kiÞ �
@eKi
@ki
ki
eKi
¼ eLiðsi � 1Þsi
EðeLi; kiÞ �
@eLi
@eki
ki
eLi
¼ eKið1 � siÞsi
ð12Þ
Free factor mobility between the two industries and efficient factor allocationimpose the common MRS condition; cf. (11):
o ¼ o1ðk1Þ ¼ o2ðk2Þ ð13Þ
For the variables k1 and k2 to satisfy (13), it is, beyond (2), furtherrequired that the intersection of the sectoral range for o1(k1) and o2(k2)is not empty,
oiðkiÞ 2 Oi ¼ ½oi; oi� � Rþ i ¼ 1; 2 o 2 O � O1 \ O2 ¼ ½o; o� 6¼ ; ð14Þ
B. S. Jensen
56 r Verein fur Socialpolitik and Blackwell Publishing Ltd 2003

The two industries are assumed to operate under perfect competition (zeroexcess profit); absolute (money) input (factor) prices (w, r) are the same inboth industries; and absolute (money) output (product, commodity) prices(P1, P2) represent unit cost. We prefer to retain money prices rather than useone of the commodities as the numeraire.
Hence, we have the competitive producer equilibrium equations:
w ¼ Pi � MPLir ¼ Pi � MPKi
o ¼ w=r Pi 6¼ 0 ð15Þ
Yi ¼ Lyili PiYi ¼ wLi þ rKi eLi¼ wLi=PiYi eKi
¼ rKi=PiYi ð16Þ
orw
Pi¼ yieLi
r
Pi¼ yieLi
o¼ f 0
i ðkiÞ eLi¼ o
ki þ oeKi
¼ ki
ki þ oð17Þ
p � P1
P2¼ MPK2
MPK1
¼ f 02ðk2Þ
f 01ðk1Þ
¼ y2eL2
y1eL1
¼ f2ðk2Þ � k2f 02ðk2Þ
f1ðk1Þ � k1f 01ðk1Þ
¼ MPL2
MPL1
ð18Þ
Remark 1. As our object is indeed miniature Walrasian general equilibriumeconomies, we may quote, for (15), (Walras, 1954, p. 385):
(1) Free competition brings the cost of production down to a minimum.(2) In a state of equilibrium, when cost of production and selling price are
equal, the prices of the services are proportional to their marginalproductivities, i.e., to the partial derivatives of the production function.
These two propositions taken together constitute the theory of marginalproductivity. This is a cardinal theory in pure economics. X
Gross domestic product (GDP), Y, is the monetary value of sector outputs,
Y � P1Y1 þ P2Y2 ¼ LðP1y1l1 þ P2y2l2Þ � Ly ð19Þ
and is, with (15–18), equal to the total factor income
Y ¼ wL þ rK ¼ Lðw þ rkÞ ¼ Lðoþ kÞPif0i ðkiÞ ¼ Ly ð20Þ
which defines the factor income distribution shares, dK1 dL51:
dK � rK=Y ¼ rk=y dL � wL=Y ¼ w=y dK=dL ¼ k=o dK ¼ k=ðoþ kÞ ð21Þ
2.1.1. CES sector technologies, boundary values, and Inada conditionsThe general CES forms of Fi(Li, Ki), (1), gi40, 0oaio1, si40, are
Yi ¼ FiðLi; KiÞ ¼ giL1�ai
i Kai
i ¼ Ligikai
i � LifiðkiÞ ð22Þ
Yi ¼ FiðLi; KiÞ ¼ gi ð1 � aiÞLðsi�1Þ=si
i þ aiKðsi�1Þ=si
i
h isi=ðsi�1Þð23Þ
Walrasian General Equilibrium Allocations and Dynamics
r Verein fur Socialpolitik and Blackwell Publishing Ltd 2003 57

¼ Ligi ð1 � aiÞ þ aikðsi�1Þ=si
i
h isi=ðsi�1Þ� LifiðkiÞ ð24Þ
f 0kðkiÞ ¼ giaik
ai�1i f 0
i ðkiÞ ¼ giai ai þ ð1 � aiÞk�ðsi�1Þ=si
i
h i1=ðsi�1Þð25Þ
By evaluating (22–25), the limits of fi(ki) and f 0i ðkiÞ become (8i : si01 )
asi=ðsi�1Þi w1):
sio1 :limki!0
fiðkiÞ ¼ limki!0
giasi=ðsi�1Þi ki ¼ 0 lim
ki!1fiðkiÞ ¼ gið1 � aiÞsi=ðsi�1Þ
limki!0
f 0i ðkiÞ ¼ gia
si=ðsi�1Þi lim
ki!1f 0i ðkiÞ ¼ 0
8><>: ð26Þ
si41 :limki!0
fiðkiÞ ¼ gið1 � aiÞsi=ðsi�1Þ limki!1
fiðkiÞ ¼ limki!1
giasi=ðsi�1Þi ki ¼ 1
limki!0
f 0i ðkiÞ ¼ 1 lim
ki!1f 0i ðkiÞ ¼ gia
si=ðsi�1Þi
8><>: ð27Þ
A major problem in both one- and two-sector growth models has been a cleardelineation of the class (parametric family) of technologies Fi that complywith the Inada (1963, p. 120) and Uzawa (1963, p. 108) boundary conditions:
fið0Þ ¼ 0 fið1Þ ¼ 1 i ¼ 1; 2 ð28Þ
f 0i ð0Þ ¼ 1 f 0
i ð1Þ ¼ 0 i ¼ 1; 2 ð29Þ
It is a paradox that regularity properties of ‘neoclassical’ production functionsare often codified by combining the concavity properties (2) with theboundary (limit) values in (28–29), because – as the comparison with (26–27)shows – neither (28) nor (29) are satisfied by the general CES family, sia1.Although Drandakis (1963, p. 227) and especially Wan (1971, pp. 37–40, 118)noted that the CD form (22) is the only CES member that fulfills the Inada–Uzawa conditions (28–29), the latter acquired a prominent role in the growthliterature, where they were relied on to guarantee the existence of at least onebalanced growth path. Relevant sufficient stability conditions, however,usually involved sectoral substitution elasticities larger or smaller than one,(siw1), which with CES technologies is inconsistent with the use of (28–29)as the existence condition. Latent contradictions thus pervade much of thestandard dynamic analysis of neoclassical and classical two-sector growthmodels. Moreover, the possibility of persistent (‘endogenous’) growth percapita is inherently precluded, since the limit f 0
i ð1Þ in (29) must be relaxed, asgenerally demonstrated for the Solow model in Jensen and Larsen (1987). Thegenerality problem with (28–29) appears in various versions. Caballe andSantos (1993, p. 1046) and Ladron-de-Guevara et al. (1999, p. 612) impose – toguarantee interiority conditions in intertemporal optimization – theunbounded marginal productivity conditions at the lower boundary and
B. S. Jensen
58 r Verein fur Socialpolitik and Blackwell Publishing Ltd 2003

required that both factors are essential:
limL!0
MPLðL; KÞ ¼ 1 limK!0
MPKðL; KÞ ¼ 1 ð30Þ
FðL; 0Þ ¼ 0 Fð0; KÞ ¼ 0 ð31Þ
For general CES functions with si 6¼ 1, (30) and (31) are also contradictory, asthe derivative limit (30) requires si41, which implies that each productionfactor is inessential, i.e. non-zero limits in (31); cf. (23). But when factors areessential (31), marginal products cannot intuitively be expected to becomeinfinitely large, no matter how little of the factor is employed (30).Accordingly, as CES with si41 demonstrates, assumptions (30–31) cannotbe maintained simultaneously.
For the CES technologies, the monotonic relations between marginal ratesof substitution, factor proportions, and output elasticities are (cf. (23–25)):
oi ¼1 � ai
aik
1=si
i ki ¼1
cioi½ �si ci ¼
1 � ai
ai
� �si
i ¼ 1;2 ð32Þ
eKi¼ 1 þ 1 � ai
aikð1�siÞ=si
i
� ��1
¼ 1
1 þ cio1�sieLi
¼ cio1�si
1 þ cio1�sið33Þ
With two-sector models and CES technologies, it is apparent from (32) thatsectoral factor ratio (‘intensity’) reversals can only be avoided if and only ifs15 s2 and a1aa2. Hence, with s1as2, there will be a reversal (intersection)point, ðki; oiÞ ¼ ðk; oÞ:
k ¼ a1ð1 � a2Þa2ð1 � a1Þ
� �s1s2=ðs2�s1Þ¼ cs1
2
cs2
1
� �1=ðs2�s1Þo ¼ c2
c1
� �1=ðs2�s1Þð34Þ
2.1.2. Product price and factor price correspondence with CES technologiesThe connection between relative factor (service) prices and relative commod-ity prices follows from (11, 13, 15, 18):
pðoÞ ¼ P1
P2ðoÞ ¼ MPK2
½k2ðoÞ�MPK1
½k1ðoÞ�¼ f 0
2½k2ðoÞ�f 01½k1ðoÞ�
o ¼ w=r ð35Þ
The elasticity of (35) is generally, by the composite rule:
E P1=P2; oð Þ ¼ E MPK2; k2ð ÞEðk2; oÞ � E MPK1
; k1ð ÞEðk1; oÞ ð36Þ
¼ ð� eL2=s2Þs2 � ð� eL1
=s1Þs1 ¼ eL1� eL2
¼ eK2� eK1
ð37Þ
Evidently, p(o) is always inelastic, as (37) is numerically less than unity.
Walrasian General Equilibrium Allocations and Dynamics
r Verein fur Socialpolitik and Blackwell Publishing Ltd 2003 59

The exact form of the function (35) needs particular attention. With (25)and (32), the relative commodity prices (comparative costs) (35) become, withsi51, sia1, and s15 s25 s, respectively,
pðoÞ ¼ f 02½k2ðoÞ�
f 01½k1ðoÞ�
¼ g2a2k2ðoÞa2�1
g1a1k1ðoÞa1�1¼ g2aa2
2 ð1 � a2Þ1�a2
g1aa1
1 ð1 � a1Þ1�a1oa2�a1 ð38Þ
pðoÞ ¼ f 02½k2ðoÞ�
f 01½k1ðoÞ�
¼g2a2 a2 þ ð1 � a2Þk2ðoÞ�ðs2�1Þ=s2
h i1=ðs2�1Þ
g1a1 a1 þ ð1 � a1Þk1ðoÞ�ðs1�1Þ=s1
h i1=ðs1�1Þ ð39Þ
¼g2a
s2=ðs2�1Þ2 1 þ c2o1�s2
1=ðs2�1Þ
g1as1=ðs1�1Þ1 1 þ c1o1�s1ð Þ1=ðs1�1Þ ð40Þ
pðoÞ ¼ g2
g1
a2
a1
� �s 1 þ c2o1�s
1 þ c1o1�s
� �1=ðs�1Þ
ci ¼1 � ai
ai
� �sð41Þ
Hence, with s1as2, and (34),
p ¼ pðoÞ ¼g2a
s2=ðs2�1Þ2 1 þ c2 c2=c1ð Þð1�s2Þ=ðs2�s1Þ
h i1=ðs2�1Þ
g1as1=ðs1�1Þ1 1 þ c1 c2=c1ð Þð1�s1Þ=ðs2�s1Þ
h i1=ðs1�1Þ ð42Þ
Since the CES marginal rate of substitution oi, (32), always has the limitvalues zero and infinity, we need, for precise geometry and intuition, to knowthe limits of the relative prices p(o), (40) for o going to zero and to infinity. Tothis end, let
p� � g2
g1
as2=ðs2�1Þ2
as1=ðs1�1Þ1
p�� � g2
g1
ð1 � a2Þs2=ðs2�1Þ
ð1 � a1Þs1=ðs1�1Þ ð43Þ
Lemma 1. The graph of p(o), (40) – the CES factor price–commodity price(FPCP) correspondence – has limits, classified by si, as follows:
s1o1 s2o1: limo!0
p ¼ p� limo!1
p ¼ p�� ð44Þ
s141 s241 : limo!0
p ¼ p�� limo!1
p ¼ p� ð45Þ
s141 s2o1 : limo!0
p ¼ 0 limo!1
p ¼ 0 ð46Þ
s1o1 s241 : limo!0
p ¼ 1 limo!1
p ¼ 1 ð47Þ
B. S. Jensen
60 r Verein fur Socialpolitik and Blackwell Publishing Ltd 2003

p** p* p
Case 1.1.1, � 1 < � 2 < 1, p∗ > p∗∗
� 2 < � 1 < 1, p∗ > p∗∗
� 1 < � 2 < 1, p∗ < p∗∗
, � 1 < � 2 , p∗ > p∗∗ � 1 < � 2 , p∗ < p∗∗
Case 1.1.2,
Case 1.1.3, � 2 < � 1 < 1, p∗ < p∗∗ Case 1.1.4,
Case 1.2.1, Case 1.2.2,
Case 1.2.3 Case 1.2.4
Case 1.3, �1 > 1, �2 < 1 , �1 < 1, �2 > 1Case 1.4
Case 1.7,
P /P k
pp** p* k
P /P
kp p** p* k
P /P k
k
P /P kp p** p*
kP /P k
p** p* kP /P k
p** p*
kp** p* kP /P k P /P k
p** p*
p p
p p
kkp p
P /P k P /P k
p*
Case 1.6,
P /P kp** p*
p**
Case 1.5, �1 = �2 < 1, a2 < a1
�1 = �2 > 1, a2 > a1 �2 = �1 > 1, a2 > a1
�1 = �2 < 1, a2 > a1
P /P kp**p*
P /P k
Case 1.8,
p** p* P /P
1 2 1 2
1 21 2
1 2 1 2
1 2 1 2
1 2 1 2
1 21 2
1 2 1 2 k
w/r Ψ J�1 �2
�
w/r Ψ J� 2 �1
�
w/r Ψ J� 2 �1
�
w/r Ψ J�1 �2
�
w/r
�� 2
�1ΨJ
w/r
�� 2
�1
Ψ J
w/r
�
� 2
�1
ΨJ
w/r
� 2
�1ΨJ
w/r
� 2
�1
ΨJ
w/r
� 1
�2
ΨJ
w/r
� 1
�2ΨJ
w/r
�
� 1
�2
ΨJ
w/r
�� 2
�1
Ψ J
w/r
�� 2
�1ΨJ
1<
, � 2 < � 1 , p∗ > p∗∗ 1< , � 2 < � 1 , p∗ < p∗∗ 1<
1<
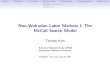
Figure 1 FPCP correspondence p(o), (40), and Walrasian kernels, k5CJ(o), (61–62,83–84)
Walrasian General Equilibrium Allocations and Dynamics
r Verein fur Socialpolitik and Blackwell Publishing Ltd 2003 61

The reversal price ratio, P1=P2 ¼ p � pðoÞ is always a maximum (iff s14s2) ora minimum (iff s24s1); cf. Figure 1. For the substitution elasticities (44–46),the range of p(o), (40) is bounded. With g15 g2, and both substitutionselasticities, either small (44) or large (45), the range of p(o) becomes a narrowinterval, and there will be only small differences between the values of p* andp** (43) – especially when ai, i51, 2, have similar size; cf. (40). Iff s15 s2a1,the functions, p(o), (41), are always monotonic, bounded, and increasingbetween p* and p** , iff a24a1. Only the CD relative prices, p(o), (38), areboth monotonic and unbounded.
Proof. Proof is given in Jensen et al. (2001). &
2.2. Demand side
As to aggregate demand (expenditure shares) decomposition betweenconsumption and investment (saving), we shall employ two macro-savingrelations, viz. ‘neoclassical’ saving and ‘classical’ saving, which have been thestandard opposites in much of the growth and trade literature.
Through history and across countries, households, businesses, andgovernment have contributed in different proportions to national saving. Itis immaterial for our purposes whether investment is controlled by owners ormanagers. The classical assumption with saving only out of capital incomeallows us to study the consequences of various demand-side specifications forthe character of the momentary general equilibrium solutions and theevolution of two distinct macrodynamic systems. Intertemporal optimizationshould not be allowed to obscure and burden the analysis in this paper onbasic two-sector dynamics.
Hence, we use the ‘neoclassical/classical’ monetary saving functions:
ðIÞ S ¼ sY 0oso1 ðIIÞ S ¼ sKdKY ¼ sKrK 0osK 1 ð48Þ
The saving assumptions are alternatively expressed by the expenditurecondition for commodity 1 (newly produced capital goods); cf. (19):
ðIÞ P1Y1 ¼ sY y=P1 ¼ l1y1=s y=P2 ¼ l2y2=ð1 � sÞ ð49Þ
ðIIÞ P1Y1 ¼ sKdKY y=P1 ¼ l1y1=sKdK dK 6¼ 0 ð50Þ
and the equivalence of the value of consumer good production andconsumption expenditures, P2Y25 (1� s)Y, P2Y25 (1� sKdK)Y, follows ob-viously from (19), (49–50). Using (49–50), (21), (15), (7–8), (4–5), the savingratios, s and sK, can alternatively be decomposed as
ðIÞ s ¼ P1Y1=Y ¼ dKlK1=eK1
¼ dLl1=eL1ð51Þ
ðIIÞ sK ¼ P1Y1=ðrKÞ ¼ s=dK ¼ lK1=eK1
ð52Þ
B. S. Jensen
62 r Verein fur Socialpolitik and Blackwell Publishing Ltd 2003

2.3. General equilibrium
The ‘demand side’ of the economy is summarized by, respectively,
ðIÞ P1Y1
P2Y2¼ s
1 � sðIIÞ P1Y1
P2Y2¼ sKdK
1 � sKdKð53Þ
The ‘supply side’ of the economy – operating under constant returns to scaleand with full (7–8) and efficient factor utilization (13–17) – is alwayssummarized by
P1Y1
P2Y2¼ P1L1y1
P2L2y2¼ L1eL2
L2eL1
¼ l1eL2
l2eL1
¼ K1eK2
K2eK1
¼ lK1eK2
lK2eK1
ð54Þ
Hence, competitive general equilibrium (CGE) states (Walrasian equilibria) –with market-clearing prices on the commodity/factor markets and Pareto-efficient endowments allocation – require, respectively,
ðIÞ s
1 � s¼ l1eL2
ð1 � l1ÞeL1
¼ lK1eK2
ð1 � lK1ÞeK1
ð55Þ
ðIIÞ sKdK
1 � sKdK¼ l1eL2
ð1 � l1ÞeL1
¼ lK1eK2
ð1 � lK1ÞeK1
ð56Þ
From (55–56), we have; cf. (51–52):
ðIÞ l1 ¼ seL1
seL1þ ð1 � sÞeL2
lK1¼ seK1
seK1þ ð1 � sÞeK2
ð57Þ
ðIIÞ l1 ¼ sKeL1ð1 � eL2
ÞsKeL1
þ ð1 � sKÞeL2
lK1¼ sKeK1
ð58Þ
Next, from (57–58) and (51–52), we get
ðIÞ dL ¼ seL1þ ð1 � sÞeL2
dK ¼ seK1þ ð1 � sÞeK2
ð59Þ
ðIIÞ dL ¼ sKeL1þ ð1 � sKÞeL2
1 þ sKðeL1� eL2
Þ dK ¼ eK2
1 þ sKðeK2� eK1
Þ ð60Þ
Finally, by (21) and (59–60), we obtain, 8k 2 Rþ; 8o 2 O, (14):
ðIÞ k ¼ odK
dL¼ o½seK1
þ ð1 � sÞeK2�
seL1þ ð1 � sÞeL2
¼ CIðoÞ ð61Þ
ðIIÞ k ¼ odK
dL¼ oeK2
sKeL1þ ð1 � sKÞeL2
¼ CIIðoÞ ð62Þ
The formulas of CJ (61–62) are ‘reduced-form’ expressions derived from the‘structural equations’ of the respective systems, J5 I, II, which relate the
Walrasian General Equilibrium Allocations and Dynamics
r Verein fur Socialpolitik and Blackwell Publishing Ltd 2003 63

‘endogenous’ two-sector general equilibrium values (solutions) of the wage–rental ratio o5w/r to the ‘exogenous’ factor endowments (aggregate capital–labor) ratio, k5K/L. Then, having obtained o from (61–62), we can go backthrough (57–60) and (18) to get the associated general equilibrium values ofall other endogenous variables (sector outputs, allocation fractions of inputs,income shares, relative commodity prices).
The ‘reduced-form’ expressions (61–62) were represented in equivalentforms; Uzawa (1961–62, p. 43; 1963, p. 108), Drandakis (1963, p. 220), Inada(1963, p. 124), Burmeister (1970, p. 123), and Gandolfo (1980, p. 487).However, the technology representation in (61–62) by the bounded outputelasticities eLi
ðeKiÞ is intuitively and mathematically convenient in further
economic analysis of CJ. Incidentally, let it here be noted that our two-sectorframework fully encompasses one-sector growth models. If the two industrieshave the same production function, f15 f2, then the Walrasian loci, CJ,(61–62), coincide with the last expression for the wage–rental curves (11).
2.3.1. General equilibria and the factor endowment–factor price correspondenceThe competitive general equilibrium (CGE) functions, CJ(o), J5 I, II – andtheir graphs, as loci of timeless general equilibrium values and as trajectoriesof motion – are of paramount importance for inquiring into the statics,comparative statics, and dynamics of two-sector economies, and k5CJ(o)may be called the factor endowment–factor price (FEFP) correspondence.Alternatively, a CGE function CJ may be dubbed the Walrasian kernel, sinceit selects in the Edgeworth box diagram the relevant Walrasian equilibriumallocation as a specific allocation (point) within the core of the contractcurve; cf. Mas-Colell et al. (1995, p. 654). The graph of a Walrasian kernel CJ
constitutes the seed/nucleus elements of Walrasian allocations, since thesubset of CGE components (o, k) generates the remaining components ofWalrasian allocations (product prices and sectoral factor allocation andproduction). The locus of the Walrasian kernel, k5CJ(o), effectively links thePareto-optimal allocations (changing contract curves of expanding Edge-worth boxes) to the relevant Walrasian equilibrium price vector, ( p, o) (onthe locus of the FPCP correspondence p(o)).
Regarding the shape of the graphs of CJ, it is evident that, if bothsubstitution elasticities are larger than one, si41, i51, 2, then the numerator(denominator) expression in (61–62) will increase (decrease) (cf. eKi
, eLi(12))
which always ensures that the two CGE (Walrasian) kernels CJ aremonotonically increasing. When one or both si are less than one, sio1, onlya detailed examination will reveal the global and local shape of the graphs. Tothis end, we calculate CGE elasticities and summarize results in:
Lemma 2. The elasticity, EI(k,o)5 (dCI/do)(o/CI), 8oAO, of the CGEfunction CI(o), (61), is given by:
EIðk; oÞ ¼ 1 þ 1=dLð Þ l1eK1s1 � 1ð Þ þ l2eK2
s2 � 1ð Þ½ � ð63Þ
B. S. Jensen
64 r Verein fur Socialpolitik and Blackwell Publishing Ltd 2003

¼ 1
dL
s
dKð1 � sÞðeK1
� eK2Þ2 þ l1eK1
s1 þ l2eK2s2
� �40 ð64Þ
By the global positivity (64), CI(o) is monotonic, and the inverse oðkÞ ¼C�1
I ðkÞ exists (not necessarily in closed form) for every kA[0, N].The elasticity, EII(k, o), of the CGE function CII(o), (62), is given by
EIIðk; oÞ ¼ s2 þsKeL1
½eK2ð1 � s2Þ � eK1
ð1 � s1Þ�sKeL1
þ ð1 � sKÞeL2
ð65Þ
¼ sKeL1ðeK2
� eK1þ eK1
s1Þ þ ð1 � sKeK1ÞeL2
s2
sKeL1þ ð1 � sKÞeL2
00 ð66Þ
By (66), CII(o) is not unfailingly monotonic, and C�1II ðkÞ will not always exist
as a single-valued inverse mapping; but the necessary and sufficientcondition for a monotonic CII(o) is a positive numerator of (66). The latteris ensured by the traditional global sectoral capital intensity ranking; cf. (66):
8o 2 O: k2ðoÞ4k1ðoÞ , eK24eK1
, eL14eL2
ð67Þ
A sufficient condition for EII(k, o)40 is (cf. (65–66)):
8o 2 O : s1ðoÞ þ s2ðoÞ � 1 ð68Þ
Proof. The capital intensity (67) was given in Uzawa (1961–62, p. 44) for thespecial case sK5 1. The substitution elasticity conditions (68) were derived inDrandakis (1963, p. 222). The generalized conditions (66), (64) were proved inJensen (1994, pp. 128, 144); see Gandolfo (1980, p. 488). &
Remark 2. The CGE elasticity of CII (62) was introduced by Drandakis (1963,p. 221). The CGE elasticity of CI (61) was called the ‘aggregate elasticityof substitution (an economy-wide elasticity of substitution between factors)’ byJones (1965, pp. 562–564), and he gave EI(k, o), with sD51, as:
EIðk; oÞ ¼ jljjyj sS þ sDð Þ ¼ l1 � lK1ð Þ eL1
� eL2ð Þ sS þ 1ð Þ40 ð69Þ
where sS represents ‘the elasticity of substitution between commodities onthe supply side (along the transformation schedule)’ (p. 563) and this positivesS is given by a composite expression of si, li, lKi
; eKi; the positive sD is the
‘elasticity of substitution between two commodities on the demand side’ (p.562) that occurs with homothetic community preferences. The proportionalsaving rate (expenditure share) assumption implies sD51. The elasticity (69)is always positive (cf. (10)), i.e. the Walrasian kernel (64) is monotonicincreasing with any common, strictly quasi-concave homogeneous utilityfunction for all economic agents (Hahn, 1965, p. 343). X
Walrasian General Equilibrium Allocations and Dynamics
r Verein fur Socialpolitik and Blackwell Publishing Ltd 2003 65

2.3.2. Multiple Walrasian equilibria and the shape of Walrasian kernelsBy admitting ‘paradoxical’ cases of negative elasticity of the CGE function CII
(62), the demand pattern (expenditure shares), (53, II ) creates an analogue tothe Giffen paradox of a positive price elasticity for a demand function of abudget-constrained utility-maximizing consumer. However, the generalequilibrium paradox is more difficult to ‘decompose’ and to formulatesuccinctly than the partial (consumer) equilibrium paradox, because bothsupply-side (with two industries) and demand-side effects determine the signof the CGE elasticities. The latter can sometimes be positive even with zerointra-sectoral substitution elasticities si50 (cf. (64)), while the ranking (67) isdecisive for the sign of (66) with si50. The paradoxical sign of priceelasticities in the Giffen and the CGE case are only local properties, restrictedto a finite part of endowment space; cf. Lemma 3 and Figure 3 below andWold (1953, pp. 100–103).
But a local region with negative sign of (66) and positive sign elsewhereimplies that at least three CGE values of the wage–rental ratio w/r in this localregion can co-exist with a constant (exogenous) factor endowment ratio K/L.This phenomenon has been interpreted as creating both a CGE ‘uniqueness’problem and a ‘dynamic causality’ problem; cf. ‘multiple equilibria’ inSection 1 and Burmeister and Dobell (1970, p. 113): ‘uniqueness of static(momentary) equilibrium at all times and causality are equivalent concepts intwo-sector models’.
As the circumstances of multiple wage–rental ratios are elusive, the subjectmatter is carefully explained for the classical case to eliminate thesepurported problems from two-sector growth models. The possibilities forthe co-existence of two CGE values of o with the same k must involve thefollowing conditions. Raising the common o will certainly increase bothsectoral capital–labor ratios ki (‘intra-sectoral substitution effect’). Hence, thetwo ki must differ, and the allocation fractions li must be distinct for k toremain unchanged; cf. (9). As the supply side is the same for (64) and (66), thedemand side and hence output composition are crucial for the actual localmultiplicity of o in the classical case (62, 66).
With unchanged k, a larger w/r evidently implies a smaller (larger) factorincome share of capital dk (labor, dL) (cf. hyperbola (21)), which reduces(increases) the demand for capital good Y1 (consumer good Y2). Wehave already mentioned that negative CGE elasticity is only possible withboth si less than one. The latter implies that the ‘intrasectoral substitution’effects may be small, and that changes in output composition will beaccomplished by intersectoral ‘substitution’ (factor reallocations, factormobility). With s1o1, it is seen from (58), (12) that lK1
decreases and so doesl1 ¼ k=k1ð ÞlK1
, (10), for constant k. Thus, sector 1 loses both factors, andits production declines, as did its demand, whereas sector 2 expands.Accordingly, the output composition (ratio) Y1/Y2 falls. With the sectoral‘capital intensity’ assumption, k14k2, and larger w/r, the price ratio (P1/P2)falls; cf. (36). With both (Y1/Y2) and (P1/P2) reduced, the expenditure share
B. S. Jensen
66 r Verein fur Socialpolitik and Blackwell Publishing Ltd 2003

(P1Y1)/(P2Y2) falls, as it also must as a consequence of a smaller dK (cf.hyperbola (53, II )); thus, with k14k2 and small si, it is consistent withCGE to have both lower and higher wage–rental ratios for a constant overallcapital–labor ratio. (Incidentally, constant overall saving ratios do not allowfor such necessary change in expenditure shares (cf. (53, I )), hence the signin (64).)
Now if we keep the small si and just change the sectoral ranking k24k1,then all the implications of a larger w/r will again be those mentioned above,except that here the price ratio (P1/P2) will increase. But with constantendowments K/L, the output ratio (Y1/Y2) and the price ratio (P1/P2) cannotmove in opposite directions and preserve competitive general equilibriumstates. It violates profit maximization (Pareto efficiency in production) (cf.Arrow and Hahn, 1971, p. 260); or just consider tangents to the transforma-tion curve in a diagram of two outputs with the concavity assumptions, (2);see also Wan (1971, pp. 124–127).
The large shifts to another Walrasian equilibrium allocation can beassociated with ‘big push’ and coordinated investments as a basis forindustrialization, as done by, for example, Murphy et al. (1989a, p. 1004;1989b, p. 540): ‘we chiefly associate the big push with multiple equilibria ofthe economy and interpret it as a switch from the cottage productionequilibrium to industrial equilibrium’. Although the static big push (factorreallocation with constant endowment) and the dynamic big push (pace offactor endowment accumulation) are related phenomena, they are distinct, asseen in Section 3 below. The big push (‘take-off’) issues are mentioned here toindicate the theoretical/empirical scope of the Walrasian kernel in ourabstract CGE two-sector growth model. For extensive treatment of CGE locus,see Balasko (1988).
Example. The widely used numerical case of multiple wage–rental ratios hasbeen the special classical case of sK51 and the CES sector technologies; cf.Uzawa (1961–62, p. 45), Burmeister (1968, p. 198), and Burmeister and Dubell(1970, p. 127):
y1 ¼ f1ðk1Þ ¼ 0:001ðk31 þ 7�4Þ1=3 y2 ¼ f2ðk2Þ ¼ ðk3
2 þ 1Þ1=3
The CES parameter values of ai, si, gi can be retrieved, (24), as
a1 ¼ 0:9996 a2 ¼ 0:5 s1 ¼ s2 ¼ 0:25 g1 ¼ 0:001 g2 ¼ 1:26
Although a1 is extreme, other values might do as well; what matters is thatboth si are much less than 0.5; cf. (68). Note that multiple CGE values of o fora given k have nothing to do with factor intensity reversals (cf. (34)), as thesectoral si are here identical; cf. Figure 1, Case 1.5. Multiple CGE with CII mayoccur on both sides of the reversal point in Cases 1.1.1–1.1.4, but only wherek14k2. &
Walrasian General Equilibrium Allocations and Dynamics
r Verein fur Socialpolitik and Blackwell Publishing Ltd 2003 67

From the discussion above and the quoted literature on two-sector growthmodels, a cardinal methodological issue becomes manifest: is non-mono-tonicity (allowing multiple values of w/r for any locally given range of K/L) ofthe CGE functions CJ an insuperable dilemma for economic disaggregation,rigorous mathematical construction, and solution of static and dynamiccompetitive general equilibrium models?
In theoretical and empirical scientific work, it often happens that, insteadof deducing ‘effects from causes’, we wish to find the ‘causes from the effects’.Thus, despite multiple Walrasian equilibria occurring locally with a non-monotonic Walrasian kernel CII, the latter as an FEFP correspondence,k5CII(o), always allows us to go back from any observed wage–rental ratio toa unique capital–labor ratio. That three different o-values can be related byCII(o) to the same k is no problem, as each o determines other distinctproperties (output prices, etc.) of each CGE allocation. But evidently, an‘exogenous’ (endowment) variable like k is not necessarily a convenient‘state’ variable in solving the static or dynamic equations of a Walrasian two-sector economy. To insist on always using k as a state variable is just defectivemathematical procedure, and the purported ‘causality’ problem (in theliterature quoted above and in the introduction) mathematically disappearsby adopting the wage–rental ratio o as a substitute state variable. ‘KeineHexerei, nur Behendigkeit’ (no black magic, only cunning).
Moreover, by observing the FEFP and FPCP correspondences in Figure 1, itis intuitively not surprising that the wage–rental ratio o turns out to be thekey variable (‘parameterization’) to describe and unlock the dynamics intwo-sector growth models: the factor price ratio o is the critical intrinsiclink (variable) connecting factor markets (endowments) and the commo-dity markets. Indeed, as we shall see, even with a monotonic CI(o), (64),the endowment ratio k will in most cases be an intractable dynamic statevariable.
2.3.3. Walrasian general equilibrium allocations with CES technologies
CD case. From (32) with si51, and (57–60), we get
ðIÞ dK ¼ a2 � sða2 � a1Þ dL ¼ 1 � a2 þ sða2 � a1Þ ð70Þ
ðIIÞ dK ¼ a2
1 þ sKða2 � a1ÞdL ¼ 1 � a2 þ sKða2 � a1Þ
1 þ sKða2 � a1Þð71Þ
ðIÞ l1 ¼ sð1 � a1Þ1 � a2 þ sða2 � a1Þ
lK1¼ sa1
a2 � sða2 � a1Þð72Þ
ðIIÞ l1 ¼ sKð1 � a1Þa2
1 � a2 þ sKða2 � a1ÞlK1
¼ sKa1 ð73Þ
B. S. Jensen
68 r Verein fur Socialpolitik and Blackwell Publishing Ltd 2003

Then, (61–62) and (70–71) give linear competitive general equilibrium (CGE)relations between the factor endowment ratio and the wage–rental ratio:
ðIÞ k ¼ CIðoÞ ¼odK
dL¼ o � a2 � s a2 � a1ð Þ
1 � a2 þ s a2 � a1ð Þ ¼ nIo ð74Þ
ðIIÞ k ¼ CIIðoÞ ¼odK
dL¼ oa2
1 � a2 þ sK a2 � a1ð Þ ¼ nIIo ð75Þ
The Walrasian kernels CJ (74–75) are in Figure 1, located between CD oi-lines.From (16), (37), (22), (74–75), we get, with oðkÞ ¼ C�1
J ðkÞ, J5 I, II,
ki oðkÞ½ � ¼ ainJ
1 � ai� k yi ¼ fi ki oðkÞ½ �ð Þ ¼ gi
ainJ
1 � ai
� �ai
kai ð76Þ
ðI�IIÞ: E Y1=Y2; kð Þ ¼ E y1=y2; kð Þ ¼ a1 � a2 E P1=P2; kð Þ ¼ a2 � a1 ð77Þ
To recapitulate, our Walrasian – or Menger/Wieser (Brems, 1986, pp. 190–193) – general equilibria of two-sector economies with CD technologiesdisplay (irrespective of the demand side) constancy of sectoral outputelasticities (cost shares), factor allocation fractions, and factor incomedistributions.
Certainly, the distributional outcomes (70–71) are no surprise with si51,but global invariance (72–73) of sectoral factor allocation fractions emphasizethe bifurcation (‘knife-edge’) status of the CD functional form. Although thesectoral capital–labor ratios (76), wage–rental ratios (32), and the factorendowment ratio k are changing, they all change at the same rate and theallocation fractions are unchanged; cf. (72–73). The general equilibriuminvariance of the ‘occupational industrial structure’, li(k), is evidentlycounterfactual consequences of CD sector technology assumptions. Theallocation fraction invariances (irrespective of steady states or not) apply toother general equilibrium systems of multisectoral ( J5 I,y, N ) economieswith CD technologies; see Dhrymes (1962, p. 268). CD assumptions serveus mainly in providing an important benchmark case within the CES family.
CES case. From (57–60), (33), we get
ðIÞ dK ¼ sð1 þ c1o1�s1Þ�1 þ ð1 � sÞð1 þ c2o1�s2Þ�1 ð78Þ
¼ 1 þ ð1 � sÞc1o1�s1 þ sc2o1�s2
1 þ c1o1�s1 þ c2o1�s2 þ c1c2o2�s1�s2
dL ¼ 1 � dK
ð79Þ
ðIIÞ dK ¼ 1 þ c1o1�s1
1 þ ð1 þ sKÞc1o1�s1 þ ð1 � sKÞc2o1�s2 þ c1c2o2�s1�s2ð80Þ
Walrasian General Equilibrium Allocations and Dynamics
r Verein fur Socialpolitik and Blackwell Publishing Ltd 2003 69

ðIÞ l1 ¼ 1 þ c2o1�s2
1 þ 1 � ss
c2c1
os1�s2 þ c2s o1�s2
k1 ¼ 1 þ c2o1�s2
1
sþ 1 � s
sc1o1�s1 þ c2o1�s2
ð81Þ
ðIIÞ l1 ¼ 1
1 þ 1 � sKsK
c2c1
os1�s2 þ c2sK
o1�s2
lK1¼ sK
1 þ c1o1�s1ð82Þ
and hence, finally, by (78–80):
ðIÞ k ¼ CIðoÞ ¼odK
dL¼ os1þs2 þ sc2o1þs1 þ ð1 � sÞc1o1þs2
sc1os2 þ ð1 � sÞc2os1 þ c1c2oð83Þ
ðIIÞ k ¼ CIIðoÞ ¼odK
dL¼ os1þs2 þ c1o1þs2
sKc1os2 þ ð1 � sKÞc2os1 þ c1c2oð84Þ
Lemma 3. The CES graphs of the Walrasian kernels, CJ, J5 I, II, (83–84), arelocated between the monotonic CES oi-curves, (32), and for any value of thesaving ratios, s and sK, the graphs of CJ pass through the intersection(reversal) point, (34), which is entirely determined by the technologyparameters. For any size of the sectoral substitution elasticities, si, i51, 2,the CGE functions, CJ, have the limit properties:
limo!0
CJðoÞ ¼ 0 limo!1
CJðoÞ ¼ 1 J ¼ I; II ð85Þ
limo!0
CJðoÞ=C0JðoÞ ¼ 0 lim
o!1CJðoÞ=C0
JðoÞ ¼ 1 ð86Þ
With (83–84), the CGE elasticities (64), (66) have finite limits as follows:
s1o1; s2o1: limo!0
EJðk; oÞ ¼ limo!1
EJðk; oÞ ¼ maxfs1; s2g ð87Þ
s141; s241: limo!0
EJðk; oÞ ¼ limo!1
EJðk; oÞ ¼ minfs1; s2g ð88Þ
si414sj : limo!0
EIðk; oÞ ¼ limo!1
EIðk; oÞ ¼ 1 ð89Þ
s1414s2 : limo!0
EIIðk; oÞ ¼ 1 limo!1
EIIðk; oÞ ¼ s2 ð90Þ
s2414s1 : limo!0
EIIðk; oÞ ¼ s2 limo!1
EIIðk; oÞ ¼ 1 ð91Þ
Proof. The verification of the logical economic test (for any s and sK) of thepassage of CJ(o) through the reversal point follows by inserting o, (34), into(83–84), which gives k (34) identically. The limits (85–86) are seen
B. S. Jensen
70 r Verein fur Socialpolitik and Blackwell Publishing Ltd 2003

immediately from (83–84). The limits (87–91) follow from the formula,EJðk;oÞ ¼ C0
JðoÞo=CJðoÞ, by straightforward calculations. These finite limitsare due to the same exponents in the dominating polynomials of the nume-rator and the denominator. For si51, formulas (79–86) are reduced to(70–75). &
Without technical progress, the ‘conditions of economic progress are self-evident’ to Walras (1954, p. 386). Besides additional labor services, ‘capitalgoods must evidently be created out of savings before their services canbecome available for use’ (p. 387). Saving (investment) rates, labor supplies,and the macrodynamic role of the capital good (machinery) in the twoindustries now need to be carefully examined.
3. THE DYNAMIC SYSTEMS AND EVOLUTION OFTWO-SECTOR ECONOMIES
The equations of factor accumulation for neoclassical and classical two-sectorgrowth models with flexible sector technologies are formally given (Uzawa,1963, p. 106), by (d is the depreciation rate of capital):
dL=dt �.L ¼ nL ð92Þ
dK=dt �.
K ¼ Y1 � dK ¼ Ly1l1 � dK ¼ L f1ðk1Þl1 � dkf g ð93Þ
In the general equilibrium models of two-sector economies, k1 and l1 are, with(64) through o (13), uniquely determined by the factor endowments ratio k;cf. (61), (62). Hence, the accumulation equations (92–93) become genuineautonomous (time invariant) differential equations in the state variables Land K, and represent a standard homogeneous dynamic system:
.L ¼ Ln � LfðkÞ ð94Þ
.K ¼ L f1ðk1½C�1
J ðkÞ�Þl1½C�1J ðkÞ� � dk
n o� LgJðkÞ J ¼ I; II ð95Þ
As gJ(k), (95), are intricate functions of k, we rewrite gJ(k) in alternative formsby (93), (48–50), (20–21); cf. Burmeister and Dobell (1970, p. 111), Wan(1971, p. 119), and Gandolfo (1980, p. 490):
.K ¼ sY=P1 � dK ¼ Lsðoþ kÞf 0
1ðk1Þ � dK ¼ Lksf 0
1ðk1ÞdK
� d �
¼ LgIðkÞ ð96Þ
.K ¼ sKdKY=P1 � dK ¼ sKKr=P1 � dK ¼ LkfsKf 0
1ðk1Þ � dg ¼ LgIIðkÞ ð97Þ
From the governing functions gJðkÞ, (96–97), J5 I, II, the director functions,
Walrasian General Equilibrium Allocations and Dynamics
r Verein fur Socialpolitik and Blackwell Publishing Ltd 2003 71

hJ(k)� gJ(k)� kf(k), of (94–95) that control dk=dt �.k become:
.k ¼ hIðkÞ ¼ k
sf0 k½oðkÞ�ð ÞdK½oðkÞ�
� ðn þ dÞ� �
oðkÞ ¼ C�1I ðkÞ ð98Þ
.k ¼ hIIðkÞ ¼ k sKf 0
1 k1½oðkÞ�ð Þ � ðn þ dÞ� �
oðkÞ ¼ C�1II ðkÞ ð99Þ
The neoclassical demand side (savings) was not affected by factor incomedistribution; cf. (48). However, to succinctly express and decompose thegoverning functions of capital accumulation, (96), the bounded variable dK(k)is mainly a formal auxiliary term helpful in evaluating concrete cases.
The dynamic systems (98–99) in k are difficult to evaluate quanti-tatively and are generally intractable; for example, if s1as2, then,k5CI(o), (83) cannot be inverted (although C�1
I exists) in closed form. Butk5CJ(o), (61–62), are continuously differentiable functions of o, anddynamics in k can, whenever convenient, be converted into dual autonomousdynamics in o,
.o ¼.k
dk=do¼ hJðkÞ
dk=do¼ hJðCJ ½o�Þ
C0JðoÞ
� �hJðoÞ ð100Þ
Hence we get (cf. (98–99)):
�hIðoÞ ¼CIðoÞC0
IðoÞsf 0
1½k1ðoÞ�dKðoÞ
� n � d� �
¼ oEIðk; oÞ
sf 01½k1ðoÞ�dKðoÞ
� n � d� �
ð101Þ
�hIIðoÞ ¼CIIðoÞC0
IIðoÞsKf 0
1½k1ðoÞ� � n � d� �
¼ oEIIðk; oÞ
sKf 01½k1ðoÞ� � n � d
� �ð102Þ
With CES technologies, we have, from (101–102), (78), (40),
�hIðoÞ ¼CIðoÞC0
IðoÞsg1a
s1=ðs1�1Þ1 1 þ c1o1�s1
1=ðs1�1Þ
s 1 þ c1o1�s1ð Þ�1 þ ð1 � sÞ 1 þ c2o1�s2ð Þ�1� ðn þ dÞ
" #ð103Þ
�hIIðoÞ ¼CIIðoÞC0
IIðoÞsg1a
s1=ðs1�1Þ1 1 þ c1o1�s1
1=ðs1�1Þ �ðn þ dÞh i
ð104Þ
with CI(o) and CII(o) given in (83–84).
3.1. Existence and uniqueness of steady states or persistent growth
The complete set (family) of k(t) solutions to the dynamic systems (98–99) isqualitatively described and classified in:
B. S. Jensen
72 r Verein fur Socialpolitik and Blackwell Publishing Ltd 2003

Theorem 1. The neoclassical and classical two-sector growth models (92–99)have no positive, stationary k(t)-solution [k(t)50 is attractor], iff
8k40 : ðIÞ b1oð n þ d½ �=sÞdKðkÞ; ðIIÞ b1o n þ dð Þ=sK ð105Þ
and have at least one steady state [ray path in (L, K)-space], iff (cf. (3)):
9k40: ðIÞ ð½n þ d�=sÞdKðkÞ 2 J1 ðIIÞ ðn þ dÞ=sK 2 J1 J1 ¼ b1; b1
h ið106Þ
The stationary capital–labor ratios 8t : kðtÞ ¼ k are obtained by
ðIÞ f 01½k1ðkÞ� ¼ ð½n þ d�=sÞdKðkÞ ðIIÞ f 0
1½k1ðkÞ� ¼ n þ dð Þ=sK ð107Þ
With positive (66) and (106), the root of hII(k) (107) is a unique attractor.With existence (106), a sufficient condition for a unique root of hI(k) is
8k40: EðhIðkÞ=k; kÞo0 , �lK1eL1
s1 � lK2½eL1
þ eL2ðs2 � 1Þ�o0 ð108Þ
With existence assured (106), a weak sufficient condition for a uniqueneoclassical attractor by (107) is
8o 2 O: EIðdK; oÞ � 0 , 8o 2 O : EIðk; oÞ � 1 ð109Þ
and strong sufficient conditions for satisfying (108) are
8o 2 O: s2ðoÞ � 1 ð110Þ
8o 2 O : s1ðoÞ ¼ s2ðoÞ ^ eL14eL2
, k2ðoÞ4k1ðoÞ ð111Þ
The time paths of the growth model solutions, k(t), display persistent growth(limt-Nk(t)5N) if and only if
8k40: ðIÞ b14 n þ d½ �=sð ÞdKðkÞ ðIIÞ b
14 n þ dð Þ=sK ð112Þ
Proof. The family of solutions to (98–99) depends entirely on the shape of thedirector function, h(k), and the number of roots of h(k). The existence of non-zero roots requires that, respectively, ([n1d]/s)dK(k) and [n1d]/sK belongs tothe range of f 0
1 as stated in (106). If no root exists, we have either the case(105) with origo as attractor, or the case (112) with persistent growth.
If it exists, a unique attractor in the interval stated in (106) alwaysoccurs with a global negative sign of the elasticity, E(h(k)/k, k)o0, that canbe derived from (98); the necessary and sufficient condition for such anegative sign is shown explicitly in (108); cf. Jensen (1994, pp. 138, 129). Abit stronger, sufficient condition (109) is that dK(k) is monotonicallyincreasing or constant, which is a special way of satisfying the criterion(108). The elasticity conditions in (109) are equivalent by k5odK/(1� dK);cf. (61).
Walrasian General Equilibrium Allocations and Dynamics
r Verein fur Socialpolitik and Blackwell Publishing Ltd 2003 73

The size of the CGE elasticity EI(k, o), (109) implies that the monotonicWalrasian kernel CI(o), (61), is concave in the diagrams of Figure 1. Similarly,the parameter condition s2Z1, (110), implies that the CGE two-sectordynamics operates (through sector output and allocation of factors) such thatthe consumer good industry will release/absorb resources conducive toreaching and maintaining the steady state k5 k, if k40 exists. &
CES case. The qualitative properties of the family of solutions k(t) in theWalrasian general equilibrium growth models with CES sector technologiesare summarized in:
Proposition 1. For the two-sector growth models (92–95) with CESsector technologies, the sufficient conditions for the existence of atleast one positive steady-state solution are (no positive, attractive, steady-state solution k (107) exists with the RHS inequalities of (113–115)reversed):
ðIÞ s1o1; s2o1: b1 ¼ g1as1=ðs1�1Þ1 4ðn þ dÞ=s ð113Þ
ðIÞ s1o1; s241 : b1 ¼ g1as1=ðs1�1Þ1 4ðn þ dÞ ð114Þ
ðIIÞ s1o1 : �bb1 ¼ g1as1=ðs1�1Þ1 4ðn þ dÞ=sK ð115Þ
With s1r1 (sufficient condition), persistent growth of k(t) is impossible. Withs141, necessary and sufficient conditions for limt-Nk(t)5N are:
ðIÞ s141; s241 : b1¼ g1a
s1=ðs1�1Þ1 4ðn þ dÞ=s ð116Þ
ðIÞ s141; s2o1 : b1¼ g1a
s1=ðs1�1Þ1 4ðn þ dÞ ð117Þ
ðIIÞ s141 : b1¼ g1a
s1=ðs1�1Þ1 4ðn þ dÞ=sK ð118Þ
except that (117) is occasionally not sufficient for small initial values.
Proof. The proof proceeds with the dual version, hJ(o). The term CJðoÞ=C0JðoÞ
has no influence on these limit analyses; cf. Lemma 3.With s1o1: the large fraction in square brackets (103) goes to zero for o-
N; hence, there are no permanent increasing solutions of o(t). If (113–114)are satisfied, then the large fraction passes at least once monotonicallythrough the constant when o goes from zero to infinity. The difference s inthe constant comes from the denominator taking values 1 or s for o-0,
B. S. Jensen
74 r Verein fur Socialpolitik and Blackwell Publishing Ltd 2003

depending on the size of s2. If the inequalities are reversed, then �hI(o) isnegative.
With s141: the large fraction in square brackets (103) goes to infinity foro-0. If and only if (116–117) are satisfied, then the large fraction eventuallyremains above the constant when o goes from zero to infinity. The differences in the constant comes from the denominator going towards the values 1 or sfor o-N, depending on the size of s2. Hence �hI(o) is positive for large valuesof k. If the inequalities are reversed, then hI(o) eventually becomes negative.The necessary conditions (116), (118) are also sufficient, as hIðkÞ and hIIðkÞare, with respectively s241 and s141, monotonically decreasing (cf. (110),(68)) but remain above the RHS values in (116), (118). The conditions (115),(118) follow from (104), (26–27); cf. (105), (112). &
Proposition 1 shows explicitly that the global existence issues of any steady-state or persistent growth depend on the size of the key parameters: si, a1, g1,s, sK, n, d. While the accumulation parameters (s, sK, n, d) play some roles, thefundamental role of the technology parameters in the capital good sector (s1, g1,a1) for deciding the types of the long-run evolution in the CGE growthmodels complies somehow with observation and economic intuition, as wellas confirms the strategic importance ascribed to capital good industries byeconomic historians and the general public; cf. Mahalanobis (1955) andRosenberg (1963).
The most important parameter in Proposition 1 is the substitutionelasticity in the capital good sector, s1 – with the CD technology asthe critical bifurcation value. The ‘total productivity’ parameter g1 in thecapital good sector matters in all the stated conditions (113–118), andthey can all be violated by giving g1 any value between 0 and N. It is beyondthe scope of this paper to enter into a discussion about the dispersionof s1 and g1; cf. Easterly and Fischer (1995) and Prescott (1998). But if werestrict g151 and if s1 ’ 2, then (116) will usually be satisfied forother relevant parameters, in particular with high saving rates. Notethat when persistent growth conditions (116–118) hold, then multipleWalrasian equilibria are ruled out, since then classical CII is (by s141, cf. (66),(68)) also monotonic in Figure 1. Evidently, the critical role in Proposition1 is played by s1 rather than s2. Nevertheless, the conclusions in Pro-position 1 contrast sharply with the standard literature on two-sector growthmodels.
This key role played by the technology of the capital good industry hasfailed to be properly recognized in the ‘mainstream’ literature of the two-sector growth models. In an extensive summary of results, Stiglitz and Uzawa(1969, p. 407) reported (e.g. in the case of neoclassical saving) that sufficientconditions for uniqueness and stability of (convergence to) balanced (steady-state) growth paths are: ‘1. substitution elasticity in each sector greater thanor equal to one; 2. capital intensity in capital goods sectorrcapital intensityin consumption goods sector’.
Walrasian General Equilibrium Allocations and Dynamics
r Verein fur Socialpolitik and Blackwell Publishing Ltd 2003 75

These two conditions are neither necessary nor sufficient for the long-runsteady-state family. Indeed, a very high value of s1 would preclude theexistence of steady-state growth (cf. (116–117)); the ‘capital intensitycondition’ cannot be maintained when s1as2 (cf. (34)) and does not addressthe global (rather than local stability and uniqueness) issue of existence of asteady state or persistent growth of k(t). In fact, none of the standarduniqueness conditions (109–111) – or even (108) – ensures existence of asteady state. A high s1 as well as a high s2 contributes to satisfying themonotonicity properties (108), but if s1 is high enough (s1 ’ 2), then nosteady state exists, and we have persistent growth (116–117) in neoclassical/classical growth models.
It is evident from a comparison of the conditions (116–117) that (117) iseasier to satisfy. In this situation, with s2o1, persistent growth of k(t) goestogether with a long-run declining relative price of the capital good; cf. (46),Figure 1, Case 1.3. The persistent growth of (116), (118), however, can beaccompanied by either relatively rising or relatively falling capital goodprices; cf. Figure 1, Case 1.2.1–1.2.4. See motion along the trajectories CJ inFigure 4 below.
3.2. Singularities, multiple equilibria, and phase portraits
It has been maintained that two-sector growth models occasionally have k(t)solutions asymptotically approaching a limit cycle, with perpetual oscillationsin the capital–labor ratio; cf. Inada (1963, p. 112). Burmeister and Dobell(1970, p. 131) followed up on this possibility in the classical growth modelwith CES technologies. We will briefly show that such dynamic anomalies arenot consequences of multiple Walrasian equilibria.
If the classical (always monotonic) function �hII(k) does not locally exist,(which can only occur for s1o1, (68), and EII(k, o)o0), (66)), the dual (whichalways exists) director function �hIIðoÞ must take over the dynamic control ofthe classical solutions, o(t) and k(t), and outline the motions on the CGEtrajectories CII. However, the dual function �hIðoÞ has singularities of its ownthat need concise explanation.
The diagrammatic exposition in Figure 2 gives the relevant graphs of �hII(o),(102), (104), for the three possible cases. The Walrasian kernel CII in localregions with the multiple Walrasian equilibria is shown at the top of Figure 2.The derivatives C0
IIðoÞ and f 01ðoÞ follow next; the three possible locations of
the steady-state value, ok (compared with o* and o** ), and their associatedsign of the bracket expression (102) give – combined with the sign of C0
IIðoÞ –the actual sign of
.o along the o-axis; cf. (102, 100). Such collection of signinformation makes the Cases 1–3 on the left side of Figure 2, which representsthe complete description of possible graphs for the dual �hIðoÞ. These threephase diagrams of
.o immediately give the corresponding solutions o(t) onthe right side of Figure 2.
B. S. Jensen
76 r Verein fur Socialpolitik and Blackwell Publishing Ltd 2003

k
ΨII (�)
�**�
�
�* k**
�� ��
��
��
� (t)
t
t
t
�(t)
kk*
ΨII (�)
�**
�*
��
�**
��
�*
�**
�*
��
�**
�*
Ψ'II
�* �**�
f 1'
�� �* �**�
f 1' f 1'
�(t)
��**�*
�*�
�**
�* �**�
��
Case 1
Case 3
Case 2
.�
n+δs
k**
k*
Ψ'II
.�
.�
Figure 2 Dual dynamics and singularities of the classical director function, �hII(o),(102)
Walrasian General Equilibrium Allocations and Dynamics
r Verein fur Socialpolitik and Blackwell Publishing Ltd 2003 77

Note that in contrast to the critical values, ok, one of the singularities of�hII(o) (with vertical tangents at o* or o** ) will be approached with infinitespeed and reached in finite time, as illustrated in Figure 2. Note also thatsolutions starting between o* and o** cannot leave this interval, andsolutions outside cannot enter it. Accordingly, no time path connects themultiple Walrasian equilibria allowed for in the classical growth model; i.e.these three different momentary (static) general equilibrium states (for agiven k) remain isolated from each other over time.
�
�**
�
�*
kk*k**
��
Case 3.1
k�
�**
�
�*
k*k**
��
Case 3.4
�
�**
k*k**
�
�*
k
��
Case 3.3
�
�**
�
�*
kk*k**
��
Case 3.2
ΨII ΨII
ΨII ΨII
Figure 3 The Walrasian kernel, CII, (62), with trajectories of [k(t), o(t)] given by �hII,(102, 84)
B. S. Jensen
78 r Verein fur Socialpolitik and Blackwell Publishing Ltd 2003

The trajectories of the family of solutions o(t), as well as the attractors/repellers from Cases 1–3, Figure 2, are depicted on their Walrasian kernels CII
in Figure 3, Cases 3.1–3.3. The associated time paths and attractors of k(t) areindicated in Figure 3. Case 3.4 compared with Case 3.2 shows very differentk(t) solutions with similar initial k(0), but distinct initial o(0) values.
The conclusion from analyzing the graphs of the dual functions �hIIðoÞ isevidently that limit cycles of o(t) and k(t) as well as instantaneous jumps(discontinuous trajectories) for the sectoral capital–labor ratios ki(t) (Bur-meister and Dobell, 1970, p. 135), do not occur here in a classical growthmodel with multiple CGE, given the assumptions hitherto upheld.
�1 �2
�1 �2 �1 �2
�1 �2
f 1'
k
k
ω
�1 �2 �1 �2
ω�
ω�
ω�
ω�
ω
.k
.k
ΨI
ΨI
(n+δ)δK/s
(n+δ)δK/s
f 1'
n+δ
β1
k
k k
hI(k)
hI(k)
−β1
n+δ
k
Figure 4 Singularities of neoclassical director function, hI(k), (98), with (114) and(117)
Walrasian General Equilibrium Allocations and Dynamics
r Verein fur Socialpolitik and Blackwell Publishing Ltd 2003 79

3.3. Neoclassical steady states and development traps
Let us again consider the neoclassical (proportional) saving case with amonotonic Walrasian kernel, CI. The shape of hI (98), �hIð101Þ, (103), and thecharacter of its singularities critically depend on the respective locations ofthe graphs of the bounded function dK and the monotonically decreasing f 0
1.With s1o1, a constellation of dK(k) and f 0
I ðkÞ (and associated hI) is shownon the left side of Figure 4, which give two steady states, of which the lowerone is a repeller. This case (with intercepts relaxing the inequality, e.g. (114),cf. (137)), giving an implosion interval below k1, is hardly of much practicalinterest. The conditions for a unique positive attractive root hI – either withs1o1 (133–134) or otherwise not satisfying the inequalities (116–117) – werealready given above ((108), (109), (111)).
With s141 and satisfying the necessary condition (117), persistent growthmay yet fail (when also multiple small roots of hI exist) for a range of initialvalues around a lower attractor. Cases like (117) and (136) are illustrated onthe right side of Figure 4. Thus, with current factor allocation and initialendowments below k2, a takeoff into persistent growth is impossible, eventhough the necessary technological opportunities for sustaining the growthprocess are available in the capital good sector. The present trap problem isnot caused by multiple Walrasian equilibria; cf. (66).
To avoid the stalemate of the development trap (initial values between k1
and k2), the remedy is to transfer adequate resources to the capital goodsector, either by increasing (at least temporarily) the overall saving(investment) rate s (‘forced saving’) and/or by imposing restraints onpopulation growth, both of which contribute to lifting hI above the axis;see the right side of Figure 4. A larger TFP parameter of the capital good sectorg1 may give a similar ‘big push’ upwards of hI in Figure 4; cf. Murphy et al.(1989), Parente and Prescott (1994), and Prescott (1998).
3.4. Persistent economic growth and asymptotic growth rates
To complement the persistent growth solutions of the state variable k(t) oro(t) with disaggregate information about the general equilibrium evolutionfor sectoral and other endogenous per capita variables, we characterize therespective time paths by their asymptotic growth rates (ooðtÞ � .o=oðtÞ, etc.):
Proposition 2. With (116–118), the long-run growth rates of k(t) ando(t) in Walrasian two-sector growth models (92–104) with CES tech-nologies are:
ðIÞ si41 : limt!1
oo ¼sb
1� ðn þ dÞ
min s1; s2f g limt!1
kk ¼ s b1� ðn þ dÞ ð119Þ
ðIIÞ si41 : limt!1
oo ¼sK b
1� ðn þ dÞ
min s1; s2f g limt!1
kk ¼ sK b1� ðn þ dÞ ð120Þ
B. S. Jensen
80 r Verein fur Socialpolitik and Blackwell Publishing Ltd 2003

With (119–120), the long-run sectoral and per capita growth rates are
limt!1
kki ¼ limt!1
yyi ¼ limt!1
ð dw=Piw=PiÞ ¼ limt!1
ð dy=Piy=PiÞ i ¼ 1; 2 ð121Þ
where
ðIÞ s14s241 : limt!1
kk1 ¼ s1
s2½sb
1� ðn þ dÞ� lim
t!1kk2 ¼ sb
1� ðn þ dÞ ð122Þ
ðIÞ 1os1os2 : limt!1
kk1 ¼ sb1� ðn þ dÞ lim
t!1kk2 ¼ s2
s1½sb
1� ðn þ dÞ� ð123Þ
ðIIÞ si41 : limt!1
kk1 ¼ s1
s2½sKb1
� ðn þ dÞ� limt!1
kk2 ¼ sKb1� ðn þ dÞ ð124Þ
If only the capital good sector has a high substitution elasticity, we have
ðIÞ s141; s2o1 : limt!1
oo ¼ limt!1
kk ¼ b1� ðn þ dÞ ð125Þ
ðIIÞ s141; s2o1 : limt!1
oo ¼sK b
1� ðn þ dÞs2
limt!1
kk ¼ sK b1� ðn þ dÞ ð126Þ
With (125–126), the long-run sectoral and per capita growth rates are
ðI2IIÞ limt!1
kk1 ¼ limt!1
yy1 ¼ limt!1
ð dw=P1w=P1Þ ¼ limt!1
ð dy=P1y=P1Þ ð127Þ
ðI2IIÞ limt!1
yy2 ¼ limt!1
ð dw=P2w=P2Þ ¼ limt!1
ð dy=P2y=P2Þ ¼ 0 ð128Þ
where
ðIÞ limt!1
kk1 ¼ s1½b1� ðn þ dÞ� lim
t!1kk2 ¼ s2½b1
� ðn þ dÞ� ð129Þ
ðIIÞ limt!1
kk1 ¼ s1=s2 sK b1� ðn þ dÞ
h ilimt!1
kk2 ¼ sK b1� ðn þ dÞ ð130Þ
Proof. Proposition 2 follows immediately from Proposition 1: (116–118),combined with (101–102), (88–90), and next using (49–50), (32–33), (27),(19), and (13).
Thus by (101–102):
limt!1
oo ¼ ½ limo!1
EJðk;oÞ��1½sJ b1� ðn þ dÞ� sI ¼ s; sII ¼ sK
Walrasian General Equilibrium Allocations and Dynamics
r Verein fur Socialpolitik and Blackwell Publishing Ltd 2003 81

The FEFP correspondence k5CJ(o) next gives kk ¼ EJðk; oÞoo; kki ¼ sioo andyyi ¼ eki
kki, holds generally with CES. These relations and limits establish therelevant asymptotic growth rates in Proposition 2. &
With both si41, and s1as2, cf. Figure 1, Case 1.2.1–1.2.4, Case 1.7–1.8, thesectoral ranking of si is not critically important for the evolution of the‘standard of living’ (consumption per capita). The latter will continue to groweither way. The long-run growth rates of kk and kki in the classical model arethe same, irrespective of s2. But if maximum growth of per capita con-sumption is the goal, then the ranking s24s141 (cf. (122–123)), with thehighest kk2 will be preferred – which contributes to mechanizing and main-taining the growth rate of the consumer goods and thereby increases thewelfare per capita (121).
The growth scenario (125), (127–129), offers the most rapid (evenunaffected by the saving parameter s) expansion of the capital good industryand the overall capital–labor ratio. The relative prices of capital goods aredeclining (cf. Figure 1, Case 1.3) and the capital stock will eventually be usedin the production of machinery; but per capita consumption is bounded.Thus, an abnormal growth scenario with a neglected modernization of theconsumer good industry evolving together with an ‘advanced’ (highlymechanized) capital good industry, is nevertheless within the scope of theneoclassical/classical two-sector growth model with CES parameters (125–126).
Some of our results resemble Rebolo (1991), but our capital good sector alsoemploys labor, and our class of persistent/endogenous growth solutions doesnot assume a linear technology for the core or composite capital good.
As to empirical evidence, the theoretical general equilibrium predictions ofProposition 2 tally with some observations and studies of long-run growthconducted by De Long and Summers (1991) and Jones (1994). In particular,high rates of equipment investment (‘mechanization’) are prime determinantsfor national growth performance (productivity, per capita growth).
We may tentatively use the sample statistics on growth and relative priceseries as evidence for regarding Cases 1.2.3–1.2.4 in Figure 1 as perhaps themost relevant overall choice for exhibiting the historical record of sectoral(industrial) growth paths. The parametric range of Case 1.8 is too narrow.Cases 1.2.3–1.2.4 imply (for smaller initial values) sectoral reversals of capital–labor ratios and relative output prices. Such reversals seem rather commonand fit historical descriptions of the capital good industry as having thelargest potential for increasing its capital–labor ratio. The production ofmachinery may initially be rather labor-intensive, but eventually becomeshighly mechanized by making various engines (steam, combustion, electric)‘cheap as well as good’; cf. Mokyr (1990, p. 87). This supports factorsubstitution and mechanization subsequently in the consumer goodindustry. In this way, the capital good (multi-purpose machinery/equipment)is a ‘Lever of Riches’ (productivity and per capita growth) in both sectors with
B. S. Jensen
82 r Verein fur Socialpolitik and Blackwell Publishing Ltd 2003

the capital good industry itself and its technology parameters being naturallyof primary importance for the economic growth process.
The Walrasian two-sector growth models and Proposition 2 confirm thislogic and demonstrate economically these mutual relations between man(labor) and machinery (capital) in the proper setting of a Walrasian generalequilibrium framework.
4. FINAL COMMENTS
Decentralization with dispersion of factor endowment and decision-makingauthority is the main principle underlying the economic assumption ofcompetitive markets with individual (profit, utility) maximizing agents. Somemay find it regrettable that it is not always benevolent intentions that delivergood results. But one can argue, as did Adam Smith, that it is very importantto understand that private interests (the invisible hand) may guide marketprocesses and nevertheless lead to social good.
However, the competitive markets and the resource allocation were not yetexplicitly governed by commodity and factor prices. The full recognition ofthe price system and several primary factors rather than only one (land orlabor), as well as the concept of a general competitive market equilibrium,can be ascribed to Leon Walras. Momentary and moving equilibria ofcommodity and factor markets in ‘miniature Walrasian general equilibriumsystems’ (and/or ‘Menger–Wieser allocations’) have been the subject matter ofour analyses of basic two-sector growth models and their solutions.
Walras completed his work in June 1900 with the vision that, some time,‘mathematical economics will rank with the mathematical sciences ofastronomy and mechanics; and on that day justice will be done to our work’(1954, p. 48). The catching-up remains to be seen. However, several criticalproblems in basic two-sector general equilibrium dynamics have beenresolved. Subjects of further research would be extensions of competitivegeneral equilibrium dynamics to higher dimensions.
APPENDIX. ASYMPTOTIC CGE ALLOCATIONS
The comparative static analysis of exogenous factor endowment variationsfor Walrasian equilibria with CES technologies is helpful for the economicunderstanding of the stock evolution of the primary factors, when one of theoutputs is a capital good. The economic understanding of static, comparativestatic, and dynamic analysis of Walrasian equilibria is inherently related.
The asymptotic factor allocations of two-sector general equilibriumeconomies with neoclassical/classical savings are calculated in Lemma A:
Lemma A. For the CES two-sector competitive general equilibrium economy,the limits of the factor allocation fractions and factor income shares are, with
Walrasian General Equilibrium Allocations and Dynamics
r Verein fur Socialpolitik and Blackwell Publishing Ltd 2003 83

a demand-side specification according to proportional saving:
si k ! 0 k ! 1
s1os2o1: l1 ! 0 lK1! s dK ! 1 l1 ! s lK1
! 0 dK ! 0 ð131Þ
14s14s2 : l1 ! 1 lK1! s dK ! 1 l1 ! s lK1
! 1 dK ! 0 ð132Þ
s14s241 : l1 ! s lK1! 0 dK ! 0 l1 ! 0 lK1
! s dK ! 1 ð133Þ
1os1os2 : l1 ! s lK1! 1 dK ! 0 l1 ! 1 lK1
! s dK ! 1 ð134Þ
s1414s2 : l1 ! 1 lK1! 0 dK ! 1 � s l1 ! 0 lK1
! 1 dK ! s ð135Þ
s1o1os2 : l1 ! 0 lK1! 1 dK ! s l1 ! 1 lK1
! 0 dK ! 1 � s ð136Þ
and are, with classical saving, ½dK � 1= 1 þ sKð Þ�:
si k ! 0 k ! 1
s1os2o1 : l1 ! 0 lK1! sK dK ! 1 l1 ! 0 lK1
! 0 dK ! 0 ð137Þ
14s14s2 : l1 ! 1 lK1! sK dK ! 1 l1 ! 0 lK1
! 0 dK ! 0 ð138Þ
s14s241 : l1 ! 0 lK1! 0 dK ! 0 l1 ! 0 lK1
! sK dK ! 1 ð139Þ
1os1os2 : l1 ! 0 lK1! 0 dK ! 0 l1 ! 1 lK1
! sK dK ! 1 ð140Þ
s1414s2 : l1 ! 1 lK1! 0 dK ! dK l1 ! 0 lK1
! sK dK ! 0 ð141Þ
s1o1os2 : l1 ! 0 lK1! sK dK ! 0 l1 ! 1 lK1
! 0 dK ! dK ð142Þ
If the sector technologies have the same si, i51,2, then the limits of(131–136) become, ½l1 � sc1= sc1 þ ð1 � sÞc2ð Þ, lK1
� sc2= sc2 þ ð1 � sÞc1ð Þ�:
si k ! 0 k ! 1s1 ¼ s2o1: l1 ! l1 lK1
! s dK ! 1 l1 ! s lK1! lK1
dK ! 0 ð143Þs1 ¼ s241 : l1 ! s lK1
! lK1dK ! 0 l1 ! l1 lK1
! s dK ! 1 ð144Þ
and (139–144) become, ½ll1 � sKc1=sKc1 þ ð1 � sKÞc2�:
si k ! 0 k ! 1s1 ¼ s2o1: l1 ! ll1 lK1
! sK dK ! 1 l1 ! 0 lK1! 0 dK ! 0 ð145Þ
s1 ¼ s241: l1 ! 0 lK1! 0 dK ! 0 l1 ! ll1 lK1
! sK dK ! 1 ð146Þ
Proof. Using (57-60, 78-82), most of the formulas follow directly from (33),and the rest via l’Hopital. &
The CGE implications of sectoral substitution elasticities (parameters) si byLemma A can intuitively and succinctly be stated in words as:
B. S. Jensen
84 r Verein fur Socialpolitik and Blackwell Publishing Ltd 2003

Proposition A. If both sio1, then the industry with the highest si will(asymptotically) completely absorb the abundant factor, but it will notnecessarily entirely dispense with the relatively scarce factor.
If both si41, then the industry with the highest si will (asymptotically)completely dispense with the scarce factor, but it will not necessarily entirelyabsorb the relatively abundant factor.
If si414sj, then the industry with the higher si will (asymptotically) fullyabsorb the abundant factor and entirely dispense with the scarce factor.
If and only if s15 s2 will the two industries asymptotically employ afraction of both factors. X
ACKNOWLEDGMENTS
For many invaluable discussions and comments on an earlier draft, I amdeeply indebted to Mogens Esrom Larsen, Institute for MathematicalSciences, University of Copenhagen.
Address for correspondence: Department of Economics, CopenhagenBusiness School, Solbjerg Plads 3, DK-2000 Frederiksberg, Denmark. Tel.:(145) 3815 2583; fax: (145) 3815 2576; e-mail: [email protected]
REFERENCES
Aghion, P. and P. Howitt (1998), Endogenous Growth Theory, MIT Press, Cambridge, MA.Arrow, K. J. and F. H. Hahn (1971), General Competitive Analysis, Holden-Day and Oliver
& Boyd, USA.Arrow, K. J., H. B. Chenery, B. S. Minhas, and R. M. Solow (1961), ‘Capital–Labour
Substitution and Economic Efficiency’, Review of Economics and Statistics 43,225–250.
Balasko, Y. (1988), Foundations of the Theory of General Equilibrium, Academic Press,New York.
Brems, H. (1986), Pioneering Economic Theory, 1630–1980, Johns Hopkins UniversityPress, Baltimore, MD.
Burmeister, E. (1968), ‘The Role of the Jacobian Determinant in the Two-SectorModel’, International Economic Review 9, 195–203.
Burmeister, E. and A. R. Dobell (1970), Mathematical Theories of Economic Growth,Macmillan, London.
Caballe, J. and M. S. Santos (1993), ‘On Endogenous Growth with Physical and HumanCapital’, Journal of Political Economy 101, 1042–1067.
De Long, J. B. and L. H. Summers (1991), ‘Equipment Investment and EconomicGrowth’, Quarterly Journal of Economics 106, 445–502.
Dhrymes, P. J. (1962), ‘A Multisectoral Model of Growth’, Quarterly Journal of Economics76, 264–278.
Dixit, A. K. (1976), The Theory of Equilibrium Growth, Oxford University Press, Oxford.Dixit, A. K. and V. Norman (1980), Theory of International Trade: A Dual, General
Equilibrium Approach, Cambridge University Press, Cambridge.
Walrasian General Equilibrium Allocations and Dynamics
r Verein fur Socialpolitik and Blackwell Publishing Ltd 2003 85

Drandakis, E. M. (1963), ‘Factor Substitution in the Two-Sector Growth Model’, Reviewof Economic Studies 9, 217–228.
Easterly, W. and S. Fischer (1995), ‘The Soviet Economic Decline’, World Bank EconomicReview 9, 341–371.
Galor, O. (1992), ‘A Two-Sector Overlapping-Generations Model: A Global Character-ization of the Dynamic System’, Econometrica 60, 351–386.
Gandolfo, G. (1980) Economic Dynamics: Methods and Models, 2nd edn, North-Holland,Amsterdam.
Gandolfo, G. (1997), Economic Dynamics, Springer Verlag, Berlin and New York.Hahn, F. H. (1965), ‘On Two-Sector Growth Models’, Review of Economic Studies 32,
339–346.Hahn, F. H. and R. C. O. Matthews (1964), ‘The Theory of Economic Growth: A
Survey’, Economic Journal 74, 779–902.Inada, K. (1963), ‘On a Two-Sector Model of Economic Growth: Comments and a
Generalization’, Review of Economic Studies 30, 119–127.Inada, K. (1964), ‘On the Stability of Growth Equilibria in Two-Sector Models’, Review
of Economic Studies 31, 127–142.Jensen, B. S. (1994), The Dynamic Systems of Basic Economic Growth Models, Kluwer,
Dordrecht.Jensen, B. S. and M. E. Larsen (1987), ‘Growth and Long-Run Stability’, Acta Applic.
Math. 9, 219–237; or in Jensen (1994, op. cit.).Jensen, B. S. and C. Wang (1999), ‘Basic Stochastic Dynamic Systems of Growth and
Trade’, Review of International Economics 7, 378–402.Jensen, B. S., M. Richter, C. Wang, and P. K. Alsholm (2001), ‘Saving Rates,
Trade, Technology, and Stochastic Dynamics’, Review of Development Economics 5,182–204.
Jones, C. I. (1994), ‘Economic Growth and the Relative Price of Capital’, Journal ofMonetary Economics 34, 359–382.
Jones, R. W. (1956), ‘Factor Proportions and the Heckscher–Ohlin Theorem’, Review ofEconomic Studies 24, 1–10.
Jones, R. W. (1965), ‘The Structure of Simple General Equilibrium Models’, Journal ofPolitical Economy 73, 557–572.
Kemp, M. C. (1969), The Pure Theory of International Trade and Investment, Prentice-Hall,Englewood Cliffs, NJ.
Ladron-de-Guevara, A., S. Ortigueira and M. S. Santos (1999), ‘A Two-Sector Model ofEndogenous Growth with Leisure’, Review of Economic Studies 66, 609–631.
Mahalanobis, P. C. (1955), ‘The Approach of Operational Research to Planning inIndia’, Sankhya: Indian Journal of Statistics 16, 3–62.
Mas-Colell, A., M. D. Whinston, and J. R. Green (1995), Microeconomic Theory, OxfordUniversity Press, New York.
Minhas, B. S. (1962), ‘The Homohypallagic Production Function, Factor IntensityReversals, and the Heckscher–Ohlin Theorem’, Journal of Political Economy 70, 138–156.
Mokyr, J. (1990), The Lever of Riches: Technological Creativity and Economic Progress,Oxford University Press, New York.
Murphy, K. M., A. Shleifer, and R. W. Vishny (1989a), ‘Industrialization and the BigPush’, Journal of Political Economy 97, 1003–1026.
Murphy, K. M., A. Shleifer, and R. Vishny (1989b), ‘Income Distribution, Market Size,and Industrialization’, Quarterly Journal of Economics 104, 537–564.
B. S. Jensen
86 r Verein fur Socialpolitik and Blackwell Publishing Ltd 2003

Parente, S. L. and E. C. Prescott (1994), ‘Barriers to Technology Adoption andDevelopment’, Journal of Political Economy, 102(2) 298–321.
Prescott, E. C. (1998), Lawrence R. Klein Lecture 1997. Needed: A Theory of TotalFactor Productivity’, International Economic Review 39, 525–551.
Rebelo, S. (1991), ‘Long-Run Policy Analysis and Long-Run Growth’, Journal of PoliticalEconomy 99, 500–521.
Rosenberg, N. (1963), ‘Capital Goods, Technology, and Economic Growth’, OxfordEconomic Papers 15, 217–227.
Solow, R. M. (1961–62), ‘Note on Uzawa’s Two-Sector Model of Economic Growth’,Review of Economic Studies 29, 48–50; or in Stiglitz and Uzawa (1969, op. cit.).
Stiglitz, J. E. and H. Uzawa (eds.) (1969), Readings in the Modern Theory of EconomicGrowth, MIT Press, Cambridge MA.
Uzawa, H. (1961–62), ‘On a Two-Sector Model of Economic Growth: I’, Review ofEconomic Studies 29, 40–47.
Uzawa, H. (1963), ‘On a Two-Sector Model of Economic Growth: II’, Review of EconomicStudies 30, 105–118; or in Stiglitz and Uzawa (1969, op. cit.).
Walras, L. (1954), Elements of Pure Economics, W. Jaffe (trans.), Allen & Unwin, London.Wan, H. Y., Jr. (1971), Economic Growth, Harcourt Brace Jovanovich, New York.Wold, H. (1953), Demand Analysis, Almquist & Wiksell, Uppsala, 1952; or John Wiley,
New York, 1953.
Walrasian General Equilibrium Allocations and Dynamics
r Verein fur Socialpolitik and Blackwell Publishing Ltd 2003 87