Embed Size (px)
Citation preview

Computer Aided Geometric Design 29 (2012) 532–540
Contents lists available at SciVerse ScienceDirect
Computer Aided Geometric Design
www.elsevier.com/locate/cagd
Volumetric Boolean sum
Gershon Elber a,∗, Yong-Joon Kim b, Myung-Soo Kim b
a Department of Computer Science, Technion – IIT, Haifa 32000, Israelb School of Comp. Science & Eng., Seoul National University, Seoul, Republic of Korea
a r t i c l e i n f o a b s t r a c t
Article history:Available online 29 March 2012
Keywords:Volumetric constructionIsogeometryTrivariate splinesMultivariate splines
Boolean sum is a well-known surface construction operation (Cohen et al., 2001). In thelight of the growing interest in trivariate B-spline and NURBs, for example in Isogeometryanalysis, in this work we extend this operator for trivariate volumetric elements. Considersix arbitrary tensor product B-spline and/or NURBs surfaces that share boundaries alonga cube-like topology. The volume that is enclosed by these six surfaces is parameterizedusing a volumetric extension of the Boolean sum for surfaces, while the boundaries of theproposed volumetric extension interpolate the six input surfaces. Finally, a generalizationof the Boolean sum idea is presented for the general multivariate case.
© 2012 Elsevier B.V. All rights reserved.
1. Introduction
The importance of tensor product trivariate NURBs and B-spline functions is increasing nowadays following the growinginterest in their use in analysis. For example, Isogeometry analysis (Cottrell et al., 2009), that employs NURBs and B-splinebasis functions, can provide more precise and stable analysis compared to existing finite elements approaches.
Given a closed piecewise linear polygonal representation, method to tile the enclosed area with rectangles in 2D and totile the enclosed volume using box (hex) elements in 3D have been an active research topic in the finite elements’ meshingcommunity for quite some time now, and more recently also in the computer graphics community (i.e. Li et al., 2011).
Tiling the volume enclosed by piecewise polynomial or rational B-spline surfaces, by tensor product trivariate patches, isof similar interest, for instance and as stated towards Isogeometry analysis. The methods that construct trivariate functionsthat parameterize the volume enclosed by freeform surfaces can be divided into two main types.
The first approach starts from the freeform boundary representation and emulate physical phenomena, such as heattransfer between the boundaries or between a boundary and an interior designated locations. The physical phenomena arereduced to solving differential equations that represent and emulate the phenomena. A recent example for this approachis Martin et al. (2008). A second, more direct, approach extends the known surface construction schemes to volumes (Paik,1992). Here, the extrusion surface, the ruled surface constructor, the surface of revolution constructor, etc. are extendedto volumes. An extrusion volume constructor takes a surface and an extrusion direction and length and creates a volumeout of the two. Similarly, a ruled volume constructor linearly blends two input surfaces. The volume of revolution rotatesa surface around an axis. This direct approach can also extend more complex construction schemes like sweep surfaces,creating swept volumes.
Attempts to construct a volume, given its boundaries, via interpolation were made, for example, in Bonomi et al. (1994)that uses higher order derivations to prescribe the interior control points of the constructed tri-cubic volume. More recently,optimized volume fitting was also used in the context of polycubes’ construction (Li et al., 2010). In Holliday and Nielson
* Corresponding author.E-mail address: [email protected] (G. Elber).
0167-8396/$ – see front matter © 2012 Elsevier B.V. All rights reserved.http://dx.doi.org/10.1016/j.cagd.2012.03.003

G. Elber et al. / Computer Aided Geometric Design 29 (2012) 532–540 533
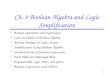
Fig. 1. The cube topology of the volumetric Boolean sum. The six faces are also presented in exploded form (in green). The twelve boundary-curves, Ckl ,between surfaces Sk and Sl , are highlighted in thick red color. (For interpretation of the references to color in this figure, the reader is referred to the webversion of this article.)
(2000), tetrahedral Coons volumes are constructed using a trilinear (u, v, w) parameterization that is composed into somefunction F that interpolates the underlying boundaries.
In this work, we show that another useful surface constructor, namely the tensor product Boolean sum constructor, canbe extended into a volumetric construction scheme. In Section 2, we present the introduced Boolean sum algorithm fortensor product volumes. In Section 3, some results are presented and in Section 4 extensions are considered, including theextension of the Boolean sum idea to a general multivariate in R
n . Finally, we conclude this work in Section 5.
2. Algorithm
Consider six surfaces spanning a parameterization over a (u, v, w) domain-cube as: S1(u, w), S2(v, w), S3(u, w),S4(v, w), S5(u, v), S6(u, v), so that S1 to S4 go around the shape and S5 and S6 form the bottom and top caps (seeFig. 1).
Let Cij be the boundary curve shared by surfaces Si and S j , and denote by Rld(Cij, Ckl, v) the ruled surface be-tween curve Cij and curve Ckl as Cij(u)(1 − v) + Ckl(u)v, v ∈ [0,1]. Similarly, denote by Rld(Sm, Sn, w) the ruledvolume between surfaces Sm and Sn as Sm(u, v)(1 − w) + Sn(u, v)w , w ∈ [0,1]. Finally, let BiLin(P00, P01, P11, P10) andTriLin(P000, P001, P011, P010, P100, P101, P111, P110) denote the bilinear and trilinear functions, respectively, through thefour/eight designated points. Without loss of generality assume u, v, w ∈ [0,1]. Then,
Definition 2.1. The volumetric Boolean sum of the given six surfaces, Si , i = 1, . . . ,6, forming a cube-like topology is
V BS(u, v, w) = Rld(
S1(u, w), S3(u, w), v) + Rld
(S2(v, w), S4(v, w), u
)+ Rld
(S5(u, v), S6(u, v), w
)− (
Rld(Rld(C15, C16, w),Rld(C35, C36, w), v
)+ Rld
(Rld(C12, C23, v),Rld(C14, C34, v), u
)+ Rld
(Rld(C25, C45, u),Rld(C26, C46, u), w
))+ TriLin
({S1(u, w)
∣∣ u, w = 0,1},
{S3(u, w)
∣∣ u, w = 0,1})
. (1)
See also Fig. 2. In the ensuing discussion, we will use V BS(u, v, w) to denote the Boolean sum over the domain but alsoV BS(F ) to denote the Boolean sum of some function defined over the domain, capturing the boundaries of F as input to theBoolean sum.
Before we prove that V BS(u, v, w) interpolates the six input surfaces, on its boundary, we provide some intuition. Dividethe seven trivariates in Eq. (1) into three groups:
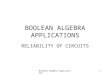
• Group A: The first three ruled volumes in Eq. (1) are of the form Rld(Si(u, w), S j(u, w), v). See also Figs. 2(b) to (d).• Group B: The second group of three ruled volumes in Eq. (1) are of the form Rld(Rld(Cil, Cik, w),Rld(C jl, C jk, w), v). See
also Figs. 2(e) to (g).• Group C : The last trilinear volume in Eq. (1). See also Fig. 2(h).

534 G. Elber et al. / Computer Aided Geometric Design 29 (2012) 532–540
Fig. 2. (a) shows a general Boolean sum volume of six input boundary surfaces (also in exploded view, in green) in a cube topology. (b) to (h) show theseven trivariates that are used in the Boolean sum computation, following Eq. (1). (For interpretation of the references to color in this figure, the reader isreferred to the web version of this article.)
Examining the same boundary surface in all seven trivariates in all three groups, we find the following: in group A,every face of the six faces of V BS(u, v, w) is accumulated once in precise original surface form and twice as ruled surfacesof opposite boundary curves. Group B accumulates every face twice as ruled surfaces of opposite boundary curves and onceas a bilinear surface. Finally, group C accumulates every face once as a bilinear surface. Summing it all up, the bilinear andruled surface representations of the faces are canceled out and the original input surface is reconstructed once. A similarcounting argument can be made to the twelve boundary curves and the eight boundary vertices. The eight boundary verticesare added four times (by groups A and C ) and subtracted three times by group B . Hence, the eight boundary vertices arereconstructed once as well.
With this intuitive introductory interpretation of these boundary conditions, the following lemma offers the necessaryvalidation:
Lemma 2.2. The boundaries of the volumetric Boolean sum, V BS(u, v, w), as in Eq. (1), interpolate the six input surfaces:
V BS(u,0, w) = S1, V BS(0, v, w) = S2, V BS(u,1, w) = S3, V BS(1, v, w) = S4,
V BS(u, v,0) = S5, and V BS(u, v,1) = S6.
Proof. We prove that V BS(u,0, w) = S1, while the other cases follow:
V BS(u,0, w) = Rld(
S1(u, w), S3(u, w),0) + Rld
(S2(0, w), S4(0, w), u
)+ Rld
(S5(u,0), S6(u,0), w
)−(
Rld(Rld(C15, C16, w),Rld(C35, C36, w),0
) + Rld(Rld(C12, C23,0),Rld(C14, C34,0, u)
+ Rld(Rld(C25, C45, u),Rld(C26, C46, u), w
))+ BiLin
({S1(u, w)
∣∣ u, w = 0,1})
= S1(u, w)
+ Rld(C12, C14, u) + Rld(C15, C16, w) − (Rld(C15, C16, w) + Rld(C12, C14), u
)+ Rld
(Rld
(S1(0,0), S1(1,0), u
),Rld
(S1(0,1), S1(1,1), u
), w
))+ BiLin
({S1(u, w)
∣∣ u, w = 0,1})

G. Elber et al. / Computer Aided Geometric Design 29 (2012) 532–540 535
= S1(u, w)
− Rld(Rld
(S1(0,0), S1(1,0), u
),Rld
(S1(0,1), S1(1,1), u
), w
)+ BiLin
({S1(u, w)
∣∣ u, w = 0,1})
.
Because, for v = 0,
TriLin({
S1(u, w)∣∣ u, w = 0,1
},{
S3(u, w)∣∣ u, w = 0,1
})is reduced to BiLin({S1(u, w) | u, w = 0,1}), and since C25, C45, C26, and C46 define, for v = 0, the four corner points of S1.But Rld(Rld(S1(0,0), S1(1,0), u),Rld(S1(0,1), S1(1,1), u), w) is exactly the bilinear through these four corners of S1(u, w),BiLin({S1(u, w) | u, w = 0,1}) or V BS(u,0, w) = S1(u, w). �
Again, Fig. 2 provides an example and shows the seven volumetric trivariates that are added and subtracted in Eq. (1).
2.1. The remainder theorem
Let F (u1, u2, u3), u1, u2, u3 ∈ [0,1] be a general trivariate function. Following Cohen et al. (2001), we reexaminethe reminder or difference between F and its volumetric Boolean sum, V BS(F ). Denote by Ru1 [F ] = Rld(F , u1) = (1 −u1)F (0, u2, u3) + u1 F (1, u2, u3), the linear ruling operator along the u1 direction between the u1 boundaries of trivariatefunction F . Then, it is simple to show that Rui and Ru j are commutative. For example:
Ru2
[Ru1 [F ]] = Rld
(Rld(F , u1), u2
) = Rld((1 − u1)F (0, u2, u3) + u1 F (1, u2, u3), u2
)= (1 − u2)
((1 − u1)F (0,0, u3) + u1 F (1,0, u3)
) + u2((1 − u1)F (0,1, u3) + u1 F (1,1, u3)
)= (1 − u1)
((1 − u2)F (0,0, u3) + u2 F (0,1, u3)
) + u1((1 − u2)F (1,0, u3) + u2 F (1,1, u3)
)= Rld
((1 − u2)F (u1,0, u3) + u2 F (u1,1, u3), u1
) = Rld(Rld(F , u2), u1
) = Ru1
[Ru2 [F ]].
We now consider compositions of operators and, for example Ru1 (Ru2 (Ru3 (F ))) defines the trilinear volume through theeight corners of F . Denote the identity operator by I . Then, the volumetric Boolean sum can be written as Ru1 [F ]+ Ru2 [F ]+Ru3 [F ] − (Ru1 [Ru2 [F ]] + Ru1 [Ru3 [F ]] + Ru2 [Ru3 [F ]]) + Ru1 [Ru2 [Ru3 [F ]]] and the remainder equals,
F − V BS[F ] = I[F ] − (Ru1 [F ] + Ru2 [F ] + Ru3 [F ]
− (Ru1
[Ru2 [F ]] + Ru1
[Ru3 [F ]] + Ru2
[Ru3 [F ]])
+ Ru1
[Ru2
[Ru3 [F ]]])
= (I[F ] − Ru1 [F ])(I[F ] − Ru2 [F ])(I[F ] − Ru3 [F ]),
or the error introduced by the volumetric Boolean sum is the tensor product of the individual errors. One should furthernote that the error (remainder) vanish on the boundaries, for ui = 0,1, as I[F ] = Rui [F ] for ui = 0,1. In other words, Rui isan operator that preserves the ui boundaries.
3. Results
We now show a few results of using the volumetric Boolean sum. All results presented were computed with the aidof the IRIT geometric modeling environment (IRIT, 2010). Figs. 3 and 4 show simple examples of a general setting of sixnon-planar surfaces in a cube-like topology.
The volumetric Boolean sum operator is designed and implemented to also input a single surface S(u, v) with a topologyof a generalized cylinder (with u the closed/periodic domain of the generalized cylinder), with no caps and parameterizethe interior volume of the generalized cylinder as follows:
1. Divide S in u into four patches Si(u, v), i = 1, . . . ,4, for example at 14 , 1
2 , 34 .
2. Extract the four v minimum boundary curves of Si(u, v), i = 1, . . . ,4, and construct a bottom (not necessarily planar)cap surface S5 using surface Boolean sum.
3. Extract the four v maximum boundary curves of Si(u, v), i = 1, . . . ,4, and construct a top cap surface S6 using surfaceBoolean sum.
4. Compute a volumetric Boolean sum to S using Si , i = 1, . . . ,6.
Figs. 5 and 6 are two examples that employ this procedure that makes it very simple to the end users to parameterizethe volume of generalized cylinders, like sweep surfaces. The cross section of the sweep is (non-)planar at the two ends in(Fig. 5) Fig. 6 and hence the bottom and top caps of the constructed trivariate are (non-)planar as well.
In Fig. 7, we exploit a sphere in a cube-like topology, following (Cobb, 1988), and use the six faces of this sphere toparameterize its interior, using volumetric Boolean sum. Fig. 8 is a similar example, in which case two of the faces of thesphere were deformed.

536 G. Elber et al. / Computer Aided Geometric Design 29 (2012) 532–540
Fig. 3. Boolean sum volume of a wavy cube – six deformed surfaces stitched together in a cube-like topology. The boundary is enhanced in red. (Forinterpretation of the references to color in this figure, the reader is referred to the web version of this article.)
Fig. 4. Boolean sum volume of a general setting of six non-planar surfaces.

G. Elber et al. / Computer Aided Geometric Design 29 (2012) 532–540 537
Fig. 5. Boolean sum volume of a sweep surface with a varying cross sections. Note the cross sections (and the caps) are not planar.
Fig. 6. Boolean sum volume of a helical surface.
Fig. 7. Boolean sum volume of a sphere with six rational faces in a cube-like topology. See also Cobb (1988).

538 G. Elber et al. / Computer Aided Geometric Design 29 (2012) 532–540
Fig. 8. Boolean sum volume of a deformed sphere with cube-like topology of six faces. Compare with Fig. 7.
4. Further considerations
The computation of the Jacobian, J , of V BS , is critical to many applications. A singular vanishing (or negative) determinantof the Jacobian, | J |, directly indicates a locally self-intersecting volume, or in other words, indicates a small neighborhoodthat is not injective. Assuming a C1 continuity for V BS , the detection of no zeros in the Jacobian in the domain of the volumeis a sufficient condition for having no local self-intersection in V BS . Since | J | consists of products of (partial derivatives of)spline functions, it is a spline as well and techniques such as Hanniel and Elber (2007) can be used to detect the existenceof zeros in | J |, if any.
That said, the Boolean sum constructor for surfaces and, herein, for volumes can clearly self-intersect, locally or globally.Global self-intersection can occur when two unrelated regions of the result intersect. For instance, when two of the inputboundaries intersect to begin with. Correcting even local self-intersection is a difficult problem and is beyond the technicalscope of this work. Typically, some relaxation process is applied to the self-intersecting object in order to eliminate theself-intersection and the result is no longer a Boolean sum of the input. Examples for such a self-intersection eliminationapproach for general surfaces can be found in Pekerman et al. (2008) and for Coons patches in specific, in Wang and Tang(2004).
Similarly, large variations in the values of the Jacobian can be detrimental to further processing of the geometry, includingin (Isogeometry) analysis. That said, one should recall we are able to compute the Jacobian matrix of a spline trivariatevolume as well as its determinant with ease, and hence these large variations cases can also be detected and possiblyrelaxed in a similar manner to Pekerman et al. (2008), Wang and Tang (2004).
The volumetric Boolean sum preserves the parameterizations of the boundary surfaces, on the boundary. However, evenif the given surfaces are regular everywhere, the volumetric result might be singular on the boundary. Reexamining thepresented results, the spherical volumes in Figs. 7 and 8 are singular at the seams between the surface boundaries, due tothe fact that the surfaces are tangential at these seams. The Boolean sum can be regular only if the adjacent surfaces in thecube topology are not C1. Toward the end of this work we also offer a solution for the tangential cases, using more thanone volumetric patch.
4.1. Boolean sum in Rn
The idea of Boolean sum in R2 and R
3 can be extrapolated to higher dimensions. Let F (u0, u1, . . . , un), where u j ∈ [0,1],j = 0, . . . ,n, be a multivariate function above R
n+1.
Definition 4.1. The Boolean sum of given 2(n + 1) hyper-surfaces, Si ⊂ Rn+1, i = 1, . . . ,2(n + 1), forming a hyper-cube-like
topology is
V BS[F ] = F −∏
i=0,n
(I − Rui )[F ]
=∑
i=0,n
Rui [F ] −∑
i=0,n−1
∑j=i+1,n
Rui Ru j [F ] + · · ·
±∑j=0,n
∏i=0,n, i �= j
Rui [F ] ∓∏
i=0,n
Rui [F ]. (2)
Consider hyper-surfaces, Si ∈ Rn+1, i = 1, . . . ,2(n + 1), forming a hyper-cube-like topology and let F (u0, u1, . . . , un) be
some multivariate function that interpolates Si on its boundaries. The remainder theorem and representation used in Eq. (2)enables us to also directly prove the following:

G. Elber et al. / Computer Aided Geometric Design 29 (2012) 532–540 539
Fig. 9. Tiling the volume of a sphere using seven regular trivariates. Only the boundary curves are shown.
Lemma 4.2. The boundaries of the Boolean sum, V BS(u0, u1, . . . , un), of 2(n + 1) hyper-surfaces, Si ∈ Rn+1 , i = 1, . . . ,2(n + 1), as
in Eq. (2), interpolate the 2(n + 1) input surfaces:
V BS(u0, u1, . . . , um = 0, . . . , un) = S2m+1, V BS(u0, u1, . . . , um = 1, . . . , un) = S2m+2.
Proof. Consider the existence of an arbitrary multivariate F (u0, u1, . . . , un) that interpolates Si on its boundaries as
F (u0, u1, . . . , um = 0, . . . , un) = S2m+1, F (u0, u1, . . . , um = 1, . . . , un) = S2m+2.
Then, we prove that V BS(F (u0, u1, . . . , um = 0, . . . , un)) = S2m+1, while the other cases follow:
F − V BS[F ] =∏
i=0,n
(I − Rui )[F ] =( ∏
i=0,...,n, i �=m
(I − Rui )
)(I − Rum )[F ]
=( ∏
i=0,...,n, i �=m
(I − Rui )
)(F − Rum [F ])
=( ∏
i=0,...,n, i �=m
(I − Rui )
)(F − (
(1 − um)F (u0, u1, . . . , um, . . . , un) + um F (u0, u1, . . . , um, . . . , un)))
=um=0
( ∏i=0,...,n, i �=m
(I − Rui )
)(F∣∣um=0 − F (u0, u1, . . . , um = 0, . . . , un)
) = 0.
The difference between F and the Boolean sum of F , V BS[F ], on the boundary of F |um=0 is zero. Hence, V BS[F ] interpolatesboundary S2m+1. �
Stated differently, the remainder is a multiplicative function, as in∏
i=0,n(Rui − I)[F ], and hence for um = 0 or um = 1,it is enough that Rum [F ] = F , for all the expression to vanish. In Section 2.1, we already noted that Rum preserves the umboundaries.
5. Conclusions
We have presented an extension to the surface Boolean sum operation and showed how the volume enclosed by sixsurfaces that are forming a cube-like topology can be parameterized using volumetric Boolean sum. We have also shownthat this extension holds in arbitrary dimension.
The direct construction of the volumetric Boolean sum is cumbersome as the six surfaces must properly be oriented andaligned with respect to each other. Hence, we also offered a construction scheme from a single generalized cylinder surface,a construction scheme that can yield singularities. If the subdivision into four parts in u as described in Section 3, occur atlocation where the original surface S is C1, or if the adjacent input surfaces are C1 at along shared seams, the result willnot be a regular volume. If permitted, an alternative piecewise-regular construction of seven trivariates can be automaticallymade, as can be seen in Fig. 9, for a sphere. This construction’s topology consists of a core cuboid volume, possibly createdusing volumetric Boolean sum, and six volumes, each of which is built (possibly as a ruling) between one surface face ofthe core volume and one boundary face.
The idea of the Boolean sum in the plane and in 3-space can potentially also be extended to parameterizing domainsthat are defined with a few squares in the plane or several boxes in 3-space, following the idea of polycube maps (Tarini etal., 2004).

540 G. Elber et al. / Computer Aided Geometric Design 29 (2012) 532–540
Acknowledgements
This research was partly supported by the Israel Science Foundation (grant No. 346/07), in part by the Israeli Ministry ofScience Grant No. 3-8273, and in part by NRF Research Grants (Nos. 2010-0005597, 2011-0018017, and 2011-00356).
References
Bonomi, E., Brieger, L.M., Merazzi, S., 1994. Application of Coons’ theory to volume interpolation.Cobb, J., 1988. Tiling the sphere with rational Bézier patches. Report TR UUCS-88-009. University of Utah, USA.Cohen, E., Riesenfeld, R.F., Elber, G., 2001. Geometric Modeling with Splines: An Introduction. A.K. Peters, Natick, MA.Cottrell, J.A., Hughes, T.J.R., Bazilevs, Y., 2009. Isogeometric Analysis: Toward Integration of CAD and FEA. John Wiley & Sons.Hanniel, I., Elber, G., 2007. Subdivision termination criteria in subdivision multivariate solvers. Computer Aided Design 39, 369–378.Holliday, D.J., Nielson, G.M., 2000. Progressive volume models for rectilinear data using tetrahedral Coons volumes. In: VisSym 00: Joint Eurographics–IEEE
TCGV Symposium on Visualization, 2000, pp. 83–92..IRIT, 2010. IRIT 10.0 User’s Manual. Technion. http://www.cs.technion.ac.il/~irit.Li, B., Li, X., Wang, K., Qin, H., 2010. Generalized polycube trivariate splines. In: Proceedings of the 2010 Shape Modeling International Conference, pp. 261–
265.Li, Y., Wang, W., Ling, R., Tu, C., 2011. Shape optimization of quad mesh elements. Computers & Graphics 35 (3), 444–451.Martin, T., Cohen, E., Kirby, R.M., 2008. Volumetric parametrization and trivariate B-spline fitting using harmonic functions. In: Symposium on Solid and
Physical Modeling 2008. Stony Brooks, NY, pp. 269–280.Paik, K., 1992. Trivariate B-splines. Master’s thesis, Department of Computer Science, University of Utah.Pekerman, D., Elber, G., Kim, M.S., 2008. Self-intersection detection and elimination in freeform curves and surfaces. Computer-Aided Design 40 (2), 150–
159.Tarini, M., Hormann, K., Cignoni, P., Montani, C., 2004. PolyCube-Maps. In: Proceedings of ACM SIGGRAPH 2004. ACM Trans. on Graphics 23 (3), 853–860.Wang, C.C.L., Tang, K., 2004. Algebraic grid generation on trimmed parametric surface using non-self-overlapping planar Coons patch. International Journal
for Numerical Methods in Engineering 60 (7), 1259–1286.