Embed Size (px)
Citation preview

0278-0046 (c) 2018 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TIE.2018.2856186, IEEETransactions on Industrial Electronics
IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS
Voltage Control of a Standalone CascadedDoubly Fed Induction Generator
Maria El Achkar, Rita Mbayed, Georges Salloum, Senior Member, IEEE, Nicolas Patin, Senior Member,IEEE, and Eric Monmasson, Senior Member, IEEE
Abstract—This paper studies the cascaded doubly fedinduction machine, operating as a brushless variable speedconstant frequency generator supplying an isolated load. Inisolated electric supply, the amplitude and frequency of theoutput voltage of the generator should be stabilized duringthe speed and/or load changing. Despite the complexity ofthe generator model, a simple indirect field oriented vectorcontrol is elaborated to meet the output voltage require-ments. Experimental results validate the proposed controlapproach. The study is extended to reveal the behavior ofthe controlled system under unbalanced load.
Index Terms—Brushless, cascaded doubly fed inductionmachine, standalone application, variable speed constantfrequency, vector control.
NOMENCLATURE
Rs, Rr Stator, rotor resistanceLs, Lr Stator, rotor cyclic inductanceMsr Stator to rotor mutual inductanceωs, ωr Stator, rotor angular frequencyθm Rotor mechanical angular positionΩ Rotor mechanical speedis, ir Stator, rotor current vectorvs, vr Stator, rotor voltage vectorφs, φr
Stator, rotor flux vectorσp Coefficient of dispersionp1, p2 Number of pole pairs of DFIM1, DFIM2gc CDFIM slip ratioξs2 Electrical Park frame anglex Phasor quantity|x| Magnitude of the alternating quantity xx Estimated quantityXd, Xq d-axis, q-axis components in Park reference frame
Manuscript received September 28, 2017; revised December 30,2017 and March 03, 2018 and April 28, 2018 and June 09, 2018;accepted June 27, 2018.
M. El Achkar, R. Mbayed G. Salloum are with ”CommandeEnergies Renouvelables et Genies Electriques” (CERGE),Lebanese University Faculty of Engineering, Roumieh,Lebanon(e-mail: [email protected], [email protected],[email protected]).
N. Patin is with ”Laboratoire d’Electromecanique” (LEC), Universityof Technology of Compiegne, Compiegne 60205, France (e-mail: [email protected]).
E. Monmasson is with ”Systemes et Applications des Technologies del’Information et de l’Energie” Laboratory (SATIE), University of Cergy-Pontoise, 95300 Cergy-Pontoise, France (e-mail: [email protected]).
dq2 Stator flux oriented synchronous frame
Subscripts1, 2 Control machine DFIM1, Power machine DFIM2ref Reference values, r Stator, rotor
I. INTRODUCTION
Due to the recent interest in renewable energy systems andembedded applications and the advance in power electron-ics, the development and control of variable speed constantfrequency generators have become a very important researchtopic. The brushless doubly fed induction machines are receiv-ing renewed attention as sources of constant voltage, constantfrequency power from variable speed prime movers, especiallyin applications where high level of reliability and long timemaintenance periodicity are required such as high power windgeneration, hydro-power systems, aircraft and marine shaftelectrical power generation. Indeed, this doubly fed generatorcan be directly connected to the grid/isolated load and provideconstant voltage constant frequency electric power thanks tothe regulation of the control machine windings. Besides, ingrid-connected operation, the generator can supply reactivecurrent and achieve independent control of the output activeand reactive powers. The generator is driven by a low powerconverter, fixed by the range of the operating speed. Theabsence of brushes offers robustness, high reliability andlow maintenance requirements, which are fundamental in theabove-mentioned applications [1], [2]. The brushless doublyfed induction machine is regarded as a potential alternative tothe popular Doubly Fed Induction Machine (DFIM). It showscommercial promises for either grid-connected or standaloneoperation [1], [3], [4].
The Cascaded Doubly Fed Induction Machine (CDFIM)is the basic concept of a doubly fed brushless machine. Itis simply formed by two wound rotor induction machinesaffixed to the same shaft with their rotor windings connected.This early version has then evolved from a structure based ontwo separated machines to a single compact electric machine.In 1970, Broadway proposed to merge the two sets of statorwindings by a dual-tapped stator windings wound into acommon stator core [5]. The stator windings must differ inthe number of pole pairs to avoid direct coupling between thewindings. Besides, the common rotor is specially designedto induce a cross-coupling effect between the two stators,with the pole number being half the sum of the stator poles.

0278-0046 (c) 2018 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TIE.2018.2856186, IEEETransactions on Industrial Electronics
IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS
The machine performances and power density improve as thismutual coupling is improved. The rotor configuration can bedivided into special nested cage type and reluctance type,introducing two descendants of the CDFIM: the BrushlessDoubly Fed Induction Machine (BDFIM) and the BrushlessDoubly Fed Reluctance Machine (BDFRM) respectively. It isshown that the rotor design and the selection of pole numbercombination are keys to the power density, and efficiencyof the machine [6]. As pointed, several design alternativesof the CDFIM exist; however this work is limited to theconceptual case of two cascaded DFIMs. This representationbeing sufficient when it comes to control design.
The majority of research interests related to the CDFIG areconcerned by the grid-connected operation. Various modelsand control methods are elaborated with attention being paidtowards their application in wind power generation systems.The maximum power point tracking and the independentregulation of active and reactive powers have been intensivelystudied [7]–[9]. The active-reactive power operating marginsof the generator were also analyzed in [10]. Recently, thetransient behavior of the grid-connected generator is the mainresearch topic. Voltage regulation and ride-through capabilityof the wind turbine during grid faults [11], [12], and compen-sation of unbalanced network [4], [13] are being investigated.
Nevertheless, with its brushless structure, reduced sizeconverters and constant amplitude constant frequency outputvoltage, the CDFIG is suitable for many industrial autonomousapplications where variable speed constant frequency oper-ation is required. In this sense, in order to assess the fullpotential and capability of this generator, new voltage controlmethods of the standalone CDFIG and similar topologies, inparticular BDFIG, are being investigated in recent years. Ascalar control strategy was proposed in [14]. The approach,based on steady-state model and Fuzzy PID, is interesting butunfortunately the response does not comply with the dynamicrequirements and the control was only tested by simulation. In[1], a modeling methodology of the autonomous CDFIG basedon dynamical equivalent circuits is suggested. The globalequivalent model of the CDFIG is represented by a complexconjugate transformer; where the two DFIMs are describedin their respective stator reference frames. Then, this modelis used for the design of the machine controller, based onthe model inversion principle. The problem in the proposedmethod is that the control is dependent of the machine param-eters and the machine model is described in multiple referenceframes giving way to a multiple-frequency control approach.A voltage and current double closed-loop control strategy of a”double-sine” wound BDFIM is elaborated in [15]. The volt-age amplitude regulation is deduced from the BDFIM steady-state per-phase equivalent circuit. The method is based oncontrol winding current decoupling using control winding fieldorientation. Yet, by examining the simulation/experimentalresults, it seems that the control approach did not yield tohigh dynamic performances: response is relatively slow with asignificant overshoot in the voltage amplitude at load variation.In addition, as pointed by the paper authors, voltage fluctuationin the power winding can be observed for a certain speedrange due to the presence of a pair of symmetrical harmonic
waves, and a compensation strategy with harmonic injection isthus carried out at a specific speed range to reduce the inter-harmonic contents. A Decoupling Network (DN) design for thed-q vector model of a BDFIG was recently proposed in [16].The method tends to avoid Feed-Forward (FF) compensationterms that require extra sensors, and have highly parameterdependency. Although, the simulation/experimental results aresatisfactory, the main concern in the suggested method is thatthe DN is in series with the BDFIG and the load. Conse-quently, the obtained control plant to be regulated becomesload and speed dependent, which influences the design ofthe controller and the response of the system for a widerange of load and speed variation. In addition, the presentedapproach requires the implementation of DN terms in thecontrol loop to overcome the coupling effect, thereby amplifiesthe computational time and complexity order of the algorithmfor real time implementation. These DN terms are function ofthe rotor speed and parameters of the machine, which increasesthe sensitivity of the controller to the parameter deviation andspeed variation.
In this paper, a new vector control of the standalone CDFIGis presented. The control scheme is elaborated based on thevector model of the generator in the unified synchronous ref-erence frame, and aims to adjust the amplitude and frequencyof the output voltage irrespective of load and speed variation.An indirect stator field orientation is proposed, in which thestator flux angle is not derived from voltage measurement andis thus shielded from noise and possible harmonic distortionon the stator voltage. The field orientation and the terminalvoltage are separately controlled. The voltage magnitude is ad-justed by action on the rotor current d-component. The q-axiscomponent is used to force the reference frame orientation.The main contribution of this work, is that the control plantto be regulated is composed of first order transfer functions,which facilitates the controller design. The controller is totallyindependent of the load; therefore it remains applicable forany load and shall not be revised. In addition, no FF termsnor DN algorithm are required in this method. The controlleris able to provide good decoupling feature, while achievinggood dynamic and permanent state behavior. Consequently,the real time implementation is simplified and the robustnessof the controller to parametric uncertainties of the systemwould be no doubt improved. The paper presents in additionan experimental validation of the proposed control strategy.Experiments considering load-disturbance are further investi-gated in this work.
The rest of the paper is organized as follows: the dynamicbehavior of the CDFIG is elaborated in section II. The controlstrategy of the standalone generator is detailed in section III. Insection IV, the control approach is validated by simulations ina first place. A comparison with the conventional FF method ispresented. The results are then compared with those obtainedexperimentally. The system is tested with reference voltage,load and rotational speed variations using a laboratory scaleCDFIM. The performance of the controlled system is furthertested under parameter deviation and unbalanced load. Theobtained results are satisfactory.

0278-0046 (c) 2018 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TIE.2018.2856186, IEEETransactions on Industrial Electronics
IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS
II. MODELING OF THE CDFIG
A. Configuration of the standalone generator
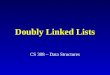
The CDFIG is composed of two wound rotor inductionmachines connected in cascade (Fig.1). The two rotors aremechanically and electrically coupled eliminating the need ofbrushes [1]. The two machines can theoretically have any polepair combination (p1, p2) with the rotors electrically connectedin positive or in negative phase sequence. Nevertheless, thepower flow analysis established in [1] has shown that the directinterconnection configuration must be avoided. In fact, forp1 = p2 there is no global electromechanical conversion thusthe CDFIM performs as a static transformer, and for p1 6= p2the signs of the two mechanical powers are different thusthe two DFIMs operate in a combined motor/generator mode.The only satisfying performances for generating systems areachieved by an inverse coupling sequence since the totalmechanical power is provided by both DFIMs, proportionallyto their respective number of pole pairs. This allows thetorques to combine in the additive manner.
DFIM 2
DFIM 1
Rotor
interconnection
𝑖𝑟
𝑖𝑠1
Load
𝑖𝑠2
SupplyPrime mover
Encoder
𝜃𝑚
Fig. 1. Configuration of the standalone CDFIG.
The major interest of a CDFIG is the operation in syn-chronous mode [17]. The machine is able to operate stably asa brushless variable speed generator over a wide speed rangewith controllable dynamic response [18]. The synchronousoperation occurs when the rotor currents, induced by bothmachines, evolve with the same frequency [19]. This way, thePower machine (DFIM2) windings can be controlled throughthe rotors from the Control machine (DFIM1) stator in abrushless manner. Under this operating mode, the frequencybehavior of the CDFIG is expressed by (1).
ωs1 = (p1 + p2)Ω− ωs2 (1)
Therefore, the CDFIG can provide a constant output frequencyωs2 by regulating the Control machine stator frequency ωs1irrespective of rotor speed variation.
B. Vector model
The main difficulty when working with the CDFIM is itsinherent complexity, and the existence of multiple referenceframes. The major issue is to synthesize an efficient globalcontrol method for these two connected machines. A spacephasor model of the CDFIM in a common reference framewith a given pole pair distribution related to one of the twomachines is proposed and verified experimentally in [20]. In
this unified coordinate, the dynamic model of the CDFIMis independent of the rotor angle position and analogous tothe DFIM model. This representation is appropriate for theelaboration of new control strategies despite the complexstructure of the system. The vector model of the CDFIM inthe unified Power machine synchronous frame (dq2) is givenby (2) to (7) [21]. 1 and 2 subscripts refer to DFIM1 andDFIM2 quantities respectively. In what follows, phasors aredenoted by underlined lower case characters and the phasorcomponents by upper case characters.
vs2 = Rs2is2 +d
dtφs2
+ jωs2φs2 (2)
vs1 = Rs1is1 +d
dtφs1
+ j (ωs2 − (p1 + p2)Ω)φs1
(3)
0 = Rrir +d
dtφr
+ j (ωs2 − p2Ω)φr
(4)
φs2
= Ls2is2 +Msr2ir (5)
φs1
= Ls1is1 −Msr1ir (6)
φr
= Lrir +Msr2is2 −Msr1is1 (7)
where Φr is a fictitious quantity representing the rotor circuitloop flux linkage, and:
Lr = Lr1 + Lr2; Rr = Rr1 +Rr2 (8)
III. VOLTAGE CONTROL OF THE STANDALONEGENERATOR
In the targeted standalone application, the CDFIG is drivenat a variable speed and supplies an isolated three-phase load.The controller must provide constant frequency and amplitudefor the terminal voltage in spite of load and/or speed variation.Unlike grid-connected systems, the output stator voltage instandalone applications is no longer established by the grid andcan be regulated by action on the rotor current. An indirectstator field oriented decoupled vector control is adopted toadjust the output voltage vs2 of the CDFIG. The approach isbased on cascaded loops with two regulation paths, devotedto control the rotor current d-axis and q-axis componentsdistinctly. The voltage magnitude is controlled by action onone of the rotor current components. The other component isused to force the reference frame orientation.
If stator field orientation is considered with the d-axisaligned along the stator flux vector φ
s2, the following relations
are deduced:
Φs2q = 0; Φs2d =∣∣∣φs2
∣∣∣ (9)
Introducing (9) in (5) and decomposing into d-q componentsyields to:
Is2q = −Msr2
Ls2Irq (10)
Is2d =Φs2dLs2
− Msr2
Ls2Ird (11)
Referring to (2), (9), (10) and (11), the dynamic behavior ofthe stator flux is expressed as:
1
Msr2Φs2d +
Ls2Rs2Msr2
d
dtΦs2d =
Ls2Rs2Msr2
Vs2d + Ird (12)
Vs2q = Rs2Is2q + ωs2Φs2d (13)

0278-0046 (c) 2018 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TIE.2018.2856186, IEEETransactions on Industrial Electronics
IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS
At steady state, the grid voltage magnitude should be main-tained constant. Neglecting the resistive voltage drop withregard to the back EMF ωs2Φs2d, the following relations areobtained:
Vs2d ' 0 (14)Vs2q ' ωs2Φs2d ' |vs2| (15)
It can be noticed from (12) and (15) that Ird and thevoltage amplitude |vs2| are linked by a first order transferfunction. The voltage d-axis component Vs2d is considered asa disturbance. Since the influence of Vs2d is negligible, thevoltage magnitude, can be directly controlled by adjusting therotor current d-component. In this context, the rotor current q-component forms a degree of freedom, it is thus manipulatedto force the vector orientation of (dq2) along the stator flux.The required Irq set point is derived from the condition ofΦs2q = 0 as:
Irq,ref = − Ls2Msr2
Is2q (16)
Notice that Irq must track its reference under the action ofa fast control loop (compared to the voltage control loop) toreach an effective reference orientation. This approach may bedenoted: ”indirect stator flux orientation vector control”. Theorientation condition means that the frame angle (the Parkangle) ξs2 can be derived from a simple integral of the outputfrequency demand ωs2,ref as shown in (17). It does not have tobe computed from stator voltage measurement or stator fluxestimated from the machine model, since the orientation isforced by the condition (16).
ξs2 =
∫ωs2,refdt (17)
Therefore the output voltage measurement or the Power ma-chine stator flux do not interfere in the orientation scheme.Consequently, the orientation is more stable, robust to loadchanges and devoid of measurement noise and possible har-monic distortion on the stator voltage; particularly in weak net-works with disturbances or unsymmetrical conditions. Theseharmonics would be intensified if the orientation angle wascalculated from voltage measurement.
Referring to (4) and (7), relation (18) is established betweenthe machine currents as:
(Rr + jωrLr) ir + Lrd
dtir + jωrMsr2is2 +Msr2
d
dtis2
− jωrMsr1is1 −Msr1d
dtis1 = 0 (18)
where ωr = ωs2 − p2Ω is the rotor angular frequency.
Substituting the quantity ofd
dtis2 using (5) gives:
(Rr + jωrLr) ir + σpLrd
dtir + jωrMsr2is2 +
Msr2
Ls2
d
dtφs2
− jωrMsr1is1 = Msr1d
dtis1 (19)
with σp being the coefficient of dispersion given by (20).
σp = 1− M2sr2
Ls2Lr(20)
On the other side, the Control machine stator current andvoltage is1 and vs1 respectively, and the rotor current ir arerelated by (21) with gcωs2 = ωs2 − (p1 + p2) Ω.
vs1 = Rs1is1 + Ls1d
dtis1 −Msr1
d
dtir + jgcωs2Ls1is1
− jgcωs2Msr1ir (21)
Introducing the expression ofd
dtis1 from (19) into (21) yields
to:
vs1 =Ls1RrMsr1
ir +
(σpLrLs1Msr1
−Msr1
)d
dtir +Rs1is1
+Ls1Msr2
Ls2Msr1
d
dtφs2− jp1ΩLs1is1 + jωr
Ls1Msr2
Msr1is2
+ j
(ωrLrLs1Msr1
− gcωs2Msr1
)ir (22)
Then, decomposing into d-q components, the following ex-pressions are obtained:
Ls1RrMsr1
Ird +
(σpLrLs1Msr1
−Msr1
)d
dtIrd = Vs1d − ad (23)
Ls1RrMsr1
Irq +
(σpLrLs1Msr1
−Msr1
)d
dtIrq = Vs1q − aq (24)
As it can be noticed, vs1 and ir d-q components are linkedby a first order linear transfer function. The factors ad and aq ,given by the following relations, define the d-q disturbancescomposed of a cross coupling perturbation and back EMFrelated to DFIM2 stator flux.
ad = Rs1Is1d +Ls1Msr2
Ls2Msr1
d
dtΦs2d + p1ΩLs1Is1q (25)
−(ωrLrLs1Msr1
− gcωs2Msr1
)Irq − ωr
Ls1Msr2
Msr1Is2q
aq = Rs1Is1q − p1ΩLs1Is1d + ωrLs1Msr2
Msr1Is2d
+
(ωrLrLs1Msr1
− gcωs2Msr1
)Ird (26)
Consequently the rotor current components Ird and Irq canbe adjusted by action on the Control machine stator voltageVs1d and Vs1q respectively.
On the basis of previous relations, the open-loop transferfunction of the standalone CDFIG in the predefined fieldoriented synchronous (dq2) frame is deduced. The plant tobe regulated is thus illustrated in Fig.2. As it can be observed,
+
System
-
+-
+
+
𝐿𝑠2
𝑅𝑠2𝑀𝑠𝑟2𝑉𝑠2𝑑
𝐾𝑣
1+𝜏𝑣𝑠
𝑎𝑑
𝑎𝑞
𝐼𝑟𝑑 𝑣𝑠2
𝐼𝑟𝑞
𝑉𝑠1𝑞
𝑉𝑠1𝑑
𝐾𝑟
1+𝜏𝑟𝑠
𝐾𝑟
1+𝜏𝑟𝑠
Fig. 2. Open loop transfer function of the standalone generator
a decoupled vector control of the CDFIG can be achievedwith the stator flux orientation. The output voltage is regulated

0278-0046 (c) 2018 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TIE.2018.2856186, IEEETransactions on Industrial Electronics
IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS
through two hierarchical loops using PI controllers (refer toFig.5). An outer loop to adjust the voltage amplitude and aninner faster loop to control the rotor current and force theindirect field orientation. The output of the voltage controlloop forms the rotor current demand Ird,ref . The voltagereferences Vs1d,ref , Vs1q,ref are provided by the rotor currentcontrollers. Compensation terms ad, aq , based on (25) and(26), are commonly added by a feed-forward action to theoutput of the PI controllers to provide linear transfer functionand overcome the coupling perturbations. However, the feed-forward method requires extra sensors to measure the controlcurrent, involves additional dq frame transformation of thesensed variable and it heavily depends on the parameteraccuracy and the quality of the measured quantities. Moreover,some feed-forward terms are physically unrealizable, and thushave to be simplified for digital implementation. All thesefactors degrade the decoupling performances.
To tackle this problem, these compensation terms are dis-carded in the proposed control strategy. The PI controlleris able to provide effective decoupling feature and suppressthe d-q perturbation effects while achieving good dynamicresponse. Consequently, no extra sensors are required, the realtime implementation of the control algorithm is simplified, theexecution time is reduced, and the robustness of the controllerto parametric deviation would be no doubt improved.
Hereinafter, the study is detailed for a laboratory scaleCDFIG. The parameters are given in Table I. The proposedcontrol scheme is illustrated in Fig.3. n1(s) and n2(s) denotethe measurement noise. A delay transfer function D(s) isincluded to take into account the delay due to the digitalcomputation and the DPWM. For the rotor current control
+-
𝐶𝐼𝑟 (𝑠) 𝐼𝑟𝑑 ,𝑟𝑒𝑓 𝐼𝑟𝑑 +
-𝐶𝑣(𝑠)
𝑇(𝑠)
𝑣𝑠2 𝑉𝑠1𝑑 +
-𝑎𝑑
𝑣𝑠2 𝑟𝑒𝑓
𝐷(𝑠)
++𝑛1
+ +
𝑛2
𝐺𝐼𝑟 (𝑠) 𝐺𝑣(𝑠)
Fig. 3. Block diagram of voltage control loop
loop, the coupling perturbations ad and aq are considered asdisturbance inputs. They can be transferred to the output sideusing wy(s) = −GIr (s) ∗ ad(s). Consequently, the followingrelation can be easily established:
Ird(s) = S(s)wy(s) + T (s) (Ird,ref (s)− n1(s)) (27)
where S(s) = 1/(1 + CIr .D.GIr ) is the outputsensitivity function. It represents the sensitivity of theoutput to the disturbances wy(s) at the output. AndT (s) = (CIr .D.GIr )/(1+ CIr .D.GIr ) is the complementarysensitivity function (also denoted the closed-loop transferfunction). It determines the relation between the output andthe reference main input as well as the effect of measurementnoise on the output signal. These two transfer functions arerelated by (28).
T (s) + S(s) = 1 (28)
The closed-loop transfer function T (s) defines the dynamicbehavior of the system. In particular, the response time is
inversely proportional to the closed-loop bandwidth. Moreover,relation (27) implies that in order to reject the perturbationeffect, it is necessary to have |S(jω)| < 1 at the frequencyrange of the disturbance. On the other hand, the measurementnoise are attenuated only if |T (jω)| < 1 [22]. However,relation (28) at first sight makes these requirements contra-dictory. Therefore, the controller design must achieve a trade-off between the control performances, perturbation rejectionand attenuation of measurement errors. Practically, referencesignals and disturbances are low frequency signals while noisemeasurement extends into a much higher frequency range.Thus, an adequate choice of the controller is to make |S(jω)|sufficiently attenuated at low frequencies and |T (jω)| at highfrequencies [22]. A PI controller CIr (s) = 7.13(1+ 1
0.0061s ) issynthesized to achieve a zero steady state error and a settlingtime of the closed-loop equal to the open-loop settling time.The bode diagram of the two sensitivity functions S(s) andT (s) are shown in Fig. 4. The balance between the twosensitivity functions is highlighted in the figure. As can be seenin Fig. 4, |S(jω)| is sufficiently attenuated at low frequency,implying that the coupling effect introduced by the disturbanceelements is correctly rejected.
|S |,
|T
| (d
B) 𝑆 𝑗𝜔
-80
-60
-40
-20
0
101
102
103
104
Frequency (rad/s)
100
10-1
105
𝑆 𝑗𝜔
𝑇 𝑗𝜔
Fig. 4. Characteristics of the sensitivity functions S(s) and T (s)
For the outer voltage loop given in Fig.3, a PI controllerCv(s) = 0.0871(1 + 1
0.208s ) is designed to meet a zero steadystate error and a settling time of the closed-loop five timessmaller than the open-loop settling time.
Since the rotor current is not accessible, a simple open-loopcurrent estimator is proposed hereinafter [1]:
φs2
=
∫(vs2 −Rs2is2) dt (29)
ir =1
Msr2
(φs2− Ls2is2
)(30)
Based on the measured stator voltage and current, thecontrol scheme of the standalone CDFIG is implemented inFig.5. The Power machine stator quantities are transformedfrom the original (abcs2) to the predefined rotating (dq2) frameby performing a Clarke transformation to (αβs2) followed bya Park transformation with the frame angle ξs2. At the outputof the controller, the voltage references Vs1d,ref , Vs1q,ref areestablished in DFIM2 synchronous frame (dq2). Therefore atransformation (by rotation) back to the DFIM1 three-phasestator frame (abcs1) is required to engender the sinusoidalreference values for the inverter. It is attained using the vec-tor transformation (31) followed by a Clarke transformation,which induces the DFIM2 stator quantities to operate at the

0278-0046 (c) 2018 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TIE.2018.2856186, IEEETransactions on Industrial Electronics
IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS
+ - ++ PWM-+
++-+
𝑎 𝑞 Compensation
terms
𝑎 𝑑
𝑎 𝑑𝑞
𝐼𝑠1𝑑𝑞
𝐼𝑠2𝑑𝑞
𝑣𝑠2 , 𝐼𝑠2𝑞
𝜉𝑠2 𝜔𝑠2,𝑟𝑒𝑓
𝑣𝑠2 𝑟𝑒𝑓 𝐼𝑟𝑑 ,𝑟𝑒𝑓
𝐼 𝑟𝑑
𝑉𝑠1𝑑 ,𝑟𝑒𝑓
𝐼𝑟𝑞 ,𝑟𝑒𝑓
𝐼 𝑟𝑞
𝑉𝑠1𝑞 ,𝑟𝑒𝑓
𝑣𝑠1 3𝑠1 𝑓𝑗
𝜉𝑠2
𝐼 𝑟𝑑𝑞
𝜉𝑠2, 𝜃𝑚1, 𝜃𝑚2
𝑖𝑠2 3𝑠2
𝑣𝑠2 3𝑠2 𝑎𝑏𝑐𝑠2
𝑎𝑏𝑐𝑠1
dq2
𝑖𝑠1 3𝑠1
dq2
dq2
𝜃𝑚1,𝜃𝑚2 𝑎𝑏𝑐𝑠1
𝑣𝑠2
𝐶𝐼𝑟 (𝑠) 𝐶𝑣(𝑠)
𝐶𝐼𝑟 (𝑠)
Load
Fig. 5. Control scheme of the standalone CDFIG
demand frequency ωs2,ref for any shaft speed, during steadystate and transient conditions.
(x)αβs1= e−j(ξs2−p1θm1−p2θm2)(x)dq2 (31)
θm1 and θm2 are the absolute mechanical angular position ofeach rotor with respect to its corresponding stator, and x theconjugate of the phasor quantity.
IV. EXPERIMENTAL VERIFICATION
A. Experimental setup
Experiments are carried out to test and validate the per-formances of the proposed control strategy. The laboratoryscale bench is illustrated in Fig.6. It comprises two woundrotor induction machines of 2.5 kW each. Their parametersare listed in Table I. Due to facilities, the set is driven by a
Load BankControl board Inverter
Unidrive SP DFIM1 DFIM2Prime mover motor
Fig. 6. CDFIM: experimental test bench
TABLE IPARAMETERS OF THE LABORATORY SCALE MACHINE
Parameters DFIM1 DFIM2Rated power active Ps1n, Ps2n ( kW) 2.5 2.5Rated output voltage Vs2n (V) - 220Rated stator current Is2n (A) - 5.5Number of pole pairs p1, p2 2 2Supply frequency (Hz) - 50Stator resistance Rs1, Rs2 (Ω) 4.66 1.29Rotor resistance Rr1, Rr2 (Ω) 0.92 1.97Stator cyclic inductance Ls1, Ls2 (mH) 473.28 268.54Rotor cyclic inductance Lr1, Lr2 (mH) 81.07 138.21Rotor/stator mutual inductance Msr1,Msr2 (mH) 191.43 182.76
servo-controlled synchronous motor of 2kW which force us todowngrade the output voltage and power of the CDFIG. Themechanical speed of the prime mover is adjusted by a universaldrive UNIDRIVE SP control unit. Notice that the DFIMs aremagnetically independent. Their shafts are directly coupledand the rotor windings are interconnected through inversesequence. The Control machine is supplied with a Pulse WidthModulation (PWM) inverter based on Insulated Gate BipolarTransistors (IGBT). The IGBT inverter operates at 5 kHz, itscontrol signals are generated by a Xilinx Spartan-3 FPGA.An incremental encoder of 4096 pulses per revolution (ppr)is mounted on the shaft to detect the rotor position. It shouldbe noted that the absolute rotor position is required for thetransformation of the machine variables to (dq2) referenceframe. Thus, the initial rotor position of each DFIM is neededto obtain correct alignment.
B. Simulation and experimental resultsThree tests are conducted: control with load variation,
with speed variation and with reference voltage variation.For comparison purpose, the controller with FF terms is alsodesigned for simulation.
The first test is done at constant speed (Ω = 1.1p.u.) withload varying from 25% up to 100% of the nominal statorcurrent. The machine stator and the load are star-connected,via a three-wire connection system. The simulation results arecollected in Fig.7. The output voltage is properly controlledat constant frequency and magnitude. The voltage amplituderemains equal to its reference despite the load variation. Therotor current responds correctly to the load change. As theconnected load increases, a greater rotor current is requiredto maintain a constant output voltage. Moreover, it is shownthat the two control methods (with and without FF) presentsimilar tracking performances of the output voltage and rotorcurrent. A close examination of the transient response revealscomparable behavior in terms of settling time and overshoot.
The experimental measurements are presented in Fig.8. Theresults comply with those obtained by simulation under thesame conditions. The RMS voltage and current waveformsas well as the rotor current d-q step response reveal thegood dynamic behavior and decoupling transient response ofthe controller. It is noted that the steady state rotor current,measured experimentally, is slightly greater ( by maximum

0278-0046 (c) 2018 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TIE.2018.2856186, IEEETransactions on Industrial Electronics
IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS
0.40.60.8
1
RM
S V
olt
age
𝑣𝑠2
(p
.u.)
-0.5
0
0.51
-1
-0.5
0
0.51
-1
M2
volt
age
𝑣𝑠2
(p.u
.)
3 6 9 12 15 18 21 24 27 300Time (s)
12.51 12.54
-1
-0.5
0
0.5
1
𝑣𝑠2
Load
curr
ent
-𝑖𝑠2
(p.u
.) 0.25 p.u. 0.5 p.u.
1 p.u.0.75 p.u.
-𝑖𝑠2
0.951
1.05 No FF
00.20.40.60.8
1
FF
Roto
r cu
rren
t
𝐼 𝑟𝑞 (
p.u
.)
13.813.4 13.6
FF
No FF
Fig. 7. Simulation results under load variation
8%) than the one obtained by simulation. This is due to theiron losses and saturation that are not taken into considerationin the machine simulation model. The small difference notedbetween the estimated and the measured rotor current arisesfrom parameter identification error.
0.40.60.8
1
1 p.u.
0.25 p.u. 0.5 p.u.
1 p.u.0.75 p.u.
3 6 9 12 15 18 21 24 27 300Time (s)
12.52 12.56
-1
-0.5
0
0.5
1
M2
vo
ltag
e
𝑣𝑠2
(p
.u.)
Load
curr
ent
-𝑖𝑠2
(p.u
.)
𝑣𝑠2 -𝑖𝑠2
0.40.60.81
1.2
0.2
RM
S V
olt
age
𝑣𝑠2
(p
.u.)
RM
S c
urr
ent
𝑖𝑟
(p.u
.)
0.2
0.4
0
0.40.6
0.2
0.8
Roto
r cu
rren
t
𝐼 𝑟𝑑
(p.u
.)
Ro
tor
curr
ent
𝐼 𝑟𝑞 (
p.u
.)
Measured current
Estimated current
0
Fig. 8. Experimental results under load variation
The second test is performed at 50% of the nominal statorcurrent. The machine is tested in both subsynchronous andsupersynchronous modes. The speed goes from 1.1p.u. downto 0.68p.u. and then increases to 1.23p.u. The response ofthe CDFIG to speed variation is illustrated in Fig.9. The
experimental measurements, under the same speed changes,are given in Fig.10.
0.40.60.8
1
RM
S V
olt
age
𝑣𝑠2
(p
.u.)
Sp
eed
(p
.u.)
1.2
0.4
0
0.8
1.6
Sta
tor
1 c
urr
ent
𝑖 𝑠1(p
.u.)
Synchronous
speed
-1
-0.5
0
0.5
1
2 40 Time (s)6 8
Fig. 9. Simulation results under speed variation
1.6
0.8
Synchronous speed
2 4 6 8 100 Time (s)
Spee
d (
p.u
.)S
tato
r 1
cu
rren
t
𝑖 𝑠1(p
.u.)
1
0.40.60.8
1
RM
S V
olt
age
𝑣𝑠2
(p
.u.)
0.40.60.8
11.2
Outp
ut
freq
.
(p.u
.)
0
0
Fig. 10. Experimental results under speed variation
The results show the precise tracking of the voltage am-plitude to its reference. The speed disturbance is properlyrejected by the controller. The grid frequency is maintainedconstant in spite of speed variation, thereby variable speedconstant frequency operation is achieved. The Control machinestator current reacts correctly, its frequency is adapted tocompensate any speed change. The experimental results matchthose obtained by simulation. The control current attained bysimulation is very close to the one measured experimentally.Less than 10% difference is recorded.
The third test is conducted under reference voltage variation.The test is done at 75% of the nominal stator current atconstant speed Ω = 1.1p.u. The reference voltage variesbetween 0.5p.u. and 1.2p.u. The performance of the proposedcontroller under parameter mismatches is further evaluated inthis test. In fact, the control method requires the estimationof the rotor current, which depends on the machine electricalparameters. Yet, these parameters are easy to vary with thegenerator state especially when the machine runs in saturation.In addition, the identification of the machine parameters might

0278-0046 (c) 2018 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TIE.2018.2856186, IEEETransactions on Industrial Electronics
IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS
be not accurate enough. Therefore, the system parameteruncertainties might affect the control behavior. In order toassess the robustness of the proposed approach, the controlis tested by simulation with electric parameter variation. Theresistances, Rsi and Rri i = 1, 2, are varied by ±50%.The inductances, Lsi, Lri, and Msri vary simultaneously by±25%. The simulation results are given in Fig.11.
0.6
1
RM
S V
olt
age
𝑣𝑠2
(p
.u.)
1.4
Roto
r cu
rren
t
𝑖 𝑟 (
p.u
.)
0
0.9
-0.9
0.45
-0.45
Sta
tor
1 c
urr
ent
𝑖 𝑠1(p
.u.)
00.5
-0.5
1
-1
3 6 9 12 15 18 21 24 27 300Time (s)
1 ,R L 20.5
0.75
R
L 3 4 50.5
1.25
R
L
1.5
0.75
R
L
1.5
1.25
R
L
,R L
,R L
RM
S c
urr
ent
𝑖𝑟
(p.u
.)
1
1.2
21.421.221
0.20.40.60.8
1
53
42
1
Proposed control method
Control method with FF
0.6
1
RM
S V
olt
age
𝑣𝑠2
(p
.u.)
1.4
RM
S c
urr
ent
𝑖𝑟
(p.u
.)
0.40.60.8
1
53
42
1
1
1.2
21.421.221
534
1 2
Fig. 11. Simulation results under reference voltage variation and inac-curate machine parameters
As shown, the output voltage keeps a good track of itsreference value. The rotor and control currents react correctlyto the reference voltage change. The increase of the referencevoltage results in an increase of the rotor current and theControl machine stator current. In addition, the results attestthat in spite of the parameters deviation the dynamic trackingperformances of the proposed controller are satisfactory, theoutput voltage requirements are met and the system remain sta-ble. The error in the rotor current estimation, due to parametermismatches, is compensated by the outer voltage control loop.The influence of parameter mismatches on the control perfor-mances and system stability can be conveniently confirmedby Bode diagrams in Fig 12. The results prove that even withcritical parameter deviation, the cutoff frequency and the phasemargin of the controlled system remain nearby their nominalvalue. This ensures stability and good dynamic performancesof the proposed controller. Besides, in the proposed controlstrategy no FF actions are included, this allows improvingthe robustness of the controller against parameter variations.Whereas, for the FF method, the transient performance of thesystem is degraded under parameter variation: overshoot and
oscillations are induced in the voltage amplitude and rotorcurrent so the system might become unstable. This is due tothe fact that the FF terms are highly dependent of the machineelectrical parameters.
-180
-135
-90
-45
0
Phas
e (d
eg)
-60-40
-20
0
20
40
Mag
nit
ude
(dB
)
Phas
e (d
eg)
Frequency (rad/s)
-80-60-40-20
020
Mag
nit
ude
(dB
)
100 101 102 103 104
Frequency (rad/s)100 101 102 103 104
,R L 0.5 ; 1.25R L 1.5 ; 0.75R L 1.5 ; 1.25R L0.5 ; 0.75R L1 2 3 4 5
-10
0
10
100 300
1
5
3
4
2
-10
0
10
10 30
15
3
4
2
-225
-180
-135
-90
-45
-270
Fig. 12. Bode plots of the compensated open-loop transfer functions:the rotor current GIr .CIr .D (left) and the stator voltage T.Gv .Cv (right)
The experimental results under reference voltage variationare given in Fig.13. The results are very close to those obtainedby simulation under the same conditions. The small differencesin the rotor and Control machine stator current magnitudesarise from iron losses and saturation in the CDFIM in additionto inevitable parameter identification error.
3 6 9 12 15 18 21 24 27 300Time (s)
Roto
r cu
rren
t
𝑖 𝑟 (
p.u
.)
M2
volt
age
𝑣𝑠2
(p.u
.)
0.45
1.35
0
0.5 p.u.
1 p.u. 1.2 p.u.
Sta
tor
1 c
urr
ent
𝑖 𝑠1(p
.u.)
0.2
0.6
1
RM
S V
olt
age
𝑣𝑠2
(p
.u.)
1.4
1
0
0.9
0
Fig. 13. Experimental results under reference voltage variation
C. Performance under unbalanced load
Previous results consider normal grid conditions. The gener-ator supplies three-phase balanced load. However, in isolatedapplications, unsymmetrical conditions such as unbalancedloads exist and can have a strong influence on the perfor-mances of the generator and the standalone configuration[23]. For this reason, the behavior of the controller underunbalanced operation is worthy to be tested. The connection ofunbalanced loads to the stator terminals of the standalone gen-erator induces unbalanced three-phase voltage at the Point ofCommon Coupling (PCC) due to the unbalanced load current,and give rise to a negative sequence component [23]. Indeedthe unbalanced load current causes an unbalanced voltage drop

0278-0046 (c) 2018 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TIE.2018.2856186, IEEETransactions on Industrial Electronics
IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS
across the internal stator impedance of the CDFIG, whichresults in unbalanced stator voltage at the PCC.
In standalone application, the main concern is the regulationof the output voltage in order to preserve the overall dynamicsystem performances and protect the behavior of other con-nected loads [23]. The effect of output voltage unbalance underunbalanced load conditions can be severe on the generator,other connected loads and power electronic converters, causingmore losses and heating problems. To assess such adverseeffects, the Voltage Unbalance Factor (VUF) for three-phasesinusoidal voltage waveforms is defined as follows [24]:
V UF =V −
V +× 100% (32)
V − and V + are the RMS voltages of the negative andpositive sequence components respectively. Referring to theanalysis presented in [25], these components can be calculatedexactly based on only the RMS line-to-line voltages Uab, Ubcand Uca without the use of complex mathematics and themeasurement of the voltage phasors. They are computed asfollows:
V − =
√√√√√A2m −
4A2s√3
2; V + =
√√√√√A2m +
4A2s√3
2(33)
A2m =
U2ab + U2
bc + U2ca
3; p =
Uab + Ubc + Uca2
(34)
A2s =
√p (p− Uab) (p− Ubc) (p− Uca) (35)
The maximum permissible values of voltage unbalanceshould remain below 3% according to grid code requisites[26], [27].
Hereinafter, the behavior of the controller under imbalanceoperation is tested. The generator is first operating at normalgrid conditions (balanced load). Then, unbalanced three-phaseload is introduced (35% load imbalance). The response of thecontrolled system is illustrated in Fig.14. As foreseen, after the
Load
curr
ent
𝑖 𝑠2𝑎
,𝑏,𝑐
(p.u
.)
Ou
tpu
t v
olt
age
𝑣𝑠2
𝑎,𝑏
,𝑐 (
p.u
.)
1 p.u.1 p.u.
5.00 ms 5.00 ms
Fig. 14. Experimental results during unbalanced load conditions
connection of the unbalanced load, the stator output voltagesof the CDFIG become three-phase unbalanced. However, thecontroller is able to effectively satisfy the requirements statedby the grid code. The obtained stator voltage unbalance factorVUF = 2.2% complies with the specified limit.
V. CONCLUSION
This paper presents a control scheme of the CDFIM forstandalone power generation application. With its brushlessstructure and fractionally rated converters, this variable speed
constant frequency generator is an interesting solution formany industrial applications where high level of reliability isrequired. Despite the complex structure of the generator, anefficient control design is elaborated with just two cascadedloops. The control target is to maintain a constant amplitudeand frequency of the output voltage irrespective of load and/orspeed variation.
A decoupled vector control, with indirect field orientation,is implemented for the regulation of the output stator voltageby action on the rotor current. The indirect orientation pro-tects the frame angle from measurement noise and possibleharmonic distortion on the stator voltage; particularly in weaknetworks with disturbances or unsymmetrical conditions. Inthe presented approach, simple PI controllers for each axiscan be easily designed with no need to extra compensationterms or decoupling algorithm, which reduces the system cost,simplifies the digital implementation and execution time, andenhances the system robustness. Experiments are performedon the laboratory scale CDFIG. The results attest the gooddynamic performances of the control system. The outputvoltage remains equal to its reference under a wide range ofload, reference voltage and rotational speed variation.
The operation of the standalone CDFIG supplying unbal-anced load is investigated too. It is proven by simulations andexperiments that with up to 40% of unbalanced loads, thecontroller achieves to maintain a VUF within the requirementsspecified by the grid code. In future work, appropriate compen-sation methods can be considered together with the proposedcontroller in order to balance the stator output voltage andreject the impact of the unbalanced load. The elaborated studyis under progress but preliminary results have already beenpresented in [28].
REFERENCES
[1] N. Patin, E. Monmasson, and J.-P. Louis, “Modeling and control of acascaded doubly fed induction generator dedicated to isolated grids,”IEEE Trans. Ind. Electron., vol. 56, DOI 10.1109/TIE.2009.2028358,no. 10, pp. 4207 –4219, Oct. 2009.
[2] T. D. Strous, “Brushless doubly-fed induction machines for wind tur-bines: developments and research challenges,” IET Elect. Power Appl.,vol. 11, DOI 10.1049/iet-epa.2016.0118, pp. 991–1000(9), Jul. 2017.
[3] Y. Liu, W. Ai, B. Chen, and K. Chen, “Control Design of the BrushlessDoubly-Fed Machines for Stand-Alone VSCF Ship Shaft GeneratorSystems,” J. Power Electron., vol. 16, DOI 10.6113/JPE.2016.16.1.259,no. 1, pp. 259–267, Jan. 2016.
[4] J. Hu, J. Zhu, and D. G. Dorrell, “A new control method of cascadedbrushless doubly fed induction generators using direct power control,”IEEE Trans. Energy Convers., vol. 29, DOI 10.1109/TEC.2014.2325046,no. 3, pp. 771–779, Sep. 2014.
[5] A. Broadway, “Cageless induction machine,” Proc. Inst. Elect. Eng., vol.118, DOI 10.1049/piee.1971.0290, no. 11, pp. 1593–1600, Nov. 1971.
[6] L. Xu, B. Guan, H. Liu, L. Gao, and K. Tsai, “Design and control of ahigh-efficiency doubly-fed brushless machine for wind power generatorapplication,” in IEEE Energy Convers. Congress and Exposition ECCE,Atlanta, GA, DOI 10.1109/ECCE.2010.5617911, pp. 2409–2416, Sep.Sept. 2010.
[7] J. Poza, E. Oyarbide, I. Sarasola, and M. Rodriguez, “Vector control de-sign and experimental evaluation for the brushless doubly fed machine,”IET Elect. Power Appl., vol. 3, DOI 10.1049/iet-epa.2008.0090, no. 4,pp. 247 –256, Jul. 2009.
[8] R. Zhao, A. Zhang, Y. Ma, X. Wang, J. Yan, and Z. Ma, “Thedynamic control of reactive power for the brushless doubly fed inductionmachine with indirect stator-quantities control scheme,” IEEE Trans.Power Electron., vol. 30, DOI 10.1109/TPEL.2014.2365675, no. 9, pp.5046–5057, Sep. 2015.

0278-0046 (c) 2018 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TIE.2018.2856186, IEEETransactions on Industrial Electronics
IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS
[9] M. E. Achkar, R. Mbayed, G. Salloum, S. Leballois, N. Patin, andE. Monmasson, “New voltage sensorless approach for maximum con-stant power tracking of WECS based on a cascaded DFIG,” in IEEE40th Annual Conference on Ind. Electron. Society, IECON 2014, DOI10.1109/IECON.2014.7048805, pp. 2185–2191, Oct. 2014.
[10] M. E. Achkar, R. Mbayed, G. Salloum, S. L. Ballois, and E. Monmasson,“Generic study of the power capability of a cascaded doubly fedinduction machine,” Int. J. Elect. Power Energy Syst., vol. 86, DOIhttp://dx.doi.org/10.1016/j.ijepes.2016.09.011, pp. 61 – 70, 2017.
[11] S. Tohidi, H. Oraee, M. Zolghadri, S. Shao, and P. Tavner, “Analysisand enhancement of low-voltage ride-through capability of brushlessdoubly fed induction generator,” IEEE Trans. Ind. Electron., vol. 60,DOI 10.1109/TIE.2012.2190955, no. 3, pp. 1146–1155, Mar. 2013.
[12] S. Tohidi, P. Tavner, R. McMahon, H. Oraee, M. Zolghadri, S. Shao,and E. Abdi, “Low voltage ride-through of DFIG and brushless DFIG:similarities and differences,” Elect. Power Syst. Res., vol. 110, DOIhttp://dx.doi.org/10.1016/j.epsr.2013.12.018, pp. 64 – 72, 2014.
[13] J. Chen, W. Zhang, B. Chen, and Y. Ma, “Improved vector controlof brushless doubly fed induction generator under unbalanced gridconditions for offshore wind power generation,” IEEE Trans. EnergyConvers., vol. 31, DOI 10.1109/TEC.2015.2479859, no. 1, pp. 293–302,Mar. 2016.
[14] W. Tao, X. Wang, and L. Yongbo, “The scalar control research basedon fuzzy PID of BDFM stand-alone power generation system,” in 2011International Conference on Electr. Information and Control Eng., DOI10.1109/ICEICE.2011.5776928, pp. 2806–2809, Apr. 2011.
[15] X. Chen, Z. Wei, X. Gao, C. Ye, and X. Wang, “Research of voltageamplitude fluctuation and compensation for wound rotor brushlessdoubly-fed machine,” IEEE Trans. Energy Convers., vol. 30, DOI10.1109/TEC.2015.2416515, no. 3, pp. 908–917, Sep. 2015.
[16] L. Sun, Y. Chen, J. Su, D. Zhang, L. Peng, and Y. Kang, “Decouplingnetwork design for inner current loops of stand-alone brushless doublyfed induction generation power system,” IEEE Trans. Power Electron.,vol. 33, DOI 10.1109/TPEL.2017.2734108, no. 2, pp. 957–963, Feb.2018.
[17] M. Adamowicz, R. Strzelecki, and D. Wojciechowski, “Steady stateanalysis of twin stator cascaded doubly fed induction generator,” in Com-patibility in Power Electron, CPE ’07, DOI 10.1109/CPE.2007.4296534,pp. 1–5, May. 2007.
[18] C. Cook and B. Smith, “Stability and stabilisation of doubly-fed single-frame cascade induction machines,” Proc. Inst. Electr. Eng., vol. 126,DOI 10.1049/piee.1979.0199, no. 11, pp. 1168 –1174, Nov. 1979.
[19] R. McMahon, P. Roberts, X. Wang, and P. Tavner, “Performance ofBDFM as generator and motor,” IEE Proc. Elect. Power Appl., vol.153, DOI 10.1049/ip-epa:20050289, no. 2, pp. 289–299, Mar. 2006.
[20] G. Esfandiari, M. Ebrahimi, A. Tabesh, and M. Esmaeilzadeh,“Dynamic modeling and analysis of cascaded DFIMs in an arbi-trary reference frame,” IEEE Trans. Energy Convers., vol. 30, DOI10.1109/TEC.2015.2416273, no. 3, pp. 999–1007, Sep. 2015.
[21] M. E. Achkar, R. Mbayed, G. Salloum, N. Patin, S. L. Bal-lois, and E. Monmasson, “Power operating domain of a cas-caded doubly fed induction machine,” Math. Comput. Simul., DOIhttp://dx.doi.org/10.1016/j.matcom.2015.02.002, InPress, 2015.
[22] J. Maciejowski, Multivariable Feedback Design. Electronic systemsengineering series. Addison-Wesley, 1989.
[23] V.-T. Phan, T. Logenthiran, W. Woo, D. Atkinson, and V. Pickert,“Analysis and compensation of voltage unbalance of a DFIG usingpredictive rotor current control,” Int. J. Elect. Power Energy Syst.,vol. 75, DOI http://dx.doi.org/10.1016/j.ijepes.2015.08.020, pp. 8 – 18,2016.
[24] V.-T. Phan and H.-H. Lee, “Improved predictive current control for un-balanced stand-alone doubly-fed induction generator-based wind powersystems,” Electric Power Applications, IET, vol. 5, DOI 10.1049/iet-epa.2010.0107, no. 3, pp. 275–287, Mar. 2011.
[25] J. Ghijselen and A. Van den Bossche, “Exact voltage unbalance assess-ment without phase measurements,” IEEE Trans. Power Syst., vol. 20,DOI 10.1109/TPWRS.2004.841145, no. 1, pp. 519–520, Feb. 2005.
[26] Grid Code 2015 for Small Scale Distributed Generation (SSDG) NetMetering Scheme, Version 2.2 - June 2017.
[27] F. Ghassemi and M. Perry, Review of Voltage Unbalance Limit in TheGB Grid Code CC.6.1.5 (b), October 2014.
[28] M. E. Achkar, R. Mbayed, G. Salloum, S. L. Ballois, and E. Mon-masson, “Compensation of voltage unbalance of a standalone cdfigusing repetitive rotor current control,” in 19th European Conferenceon Power Electron. and Applications (EPE’17 ECCE Europe), DOI10.23919/EPE17ECCEEurope.2017.8099020, pp. P.1–P.9, Sep. 2017.
M. EL Achkar received the Electrical Ing.Dipl.from the Lebanese University, Lebanon, in2012, the M.Sc. degree in Industrial Controlfrom the Universite de Technologies deCompiegne (UTC), France in 2012 andthe PhD degree in Electrical Engineeringfrom Cergy-Pontoise University, Francein 2016. Her research interests includemodeling analysis and control of electricalmachines, power converters and renewableenergy.
R. Mbayed has received an ElectricalEngineering diploma from the LebaneseUniversity, Lebanon, in 2006, a M.Sc. degreein Industrial Control from the Universite deTechnologies de Compiegne (UTC), Francein 2007 and a PhD in Electrical Engineeringfrom Cergy-Pontoise University, France in2012. She is currently an Associate Professorat the Lebanese University. Her researchinterests concern modeling and control ofnon-conventional electrical machines and
management of renewable energy sources.
G. Salloum has received the diploma inElectromechanical Engineering from the EcoleSuperieure d’Ingenieurs of Beirut (ESIB),Lebanon in 1988, and the Ph.D. degree inElectrical Engineering from the Institut NationalPolytechnique (INP), Toulouse, FRANCE in2007. He is currently a Professor and the headof CERGE research team at the LebaneseUniversity. He is a senior member of the IEEE.His research interests concern modeling andcontrol of non-conventional electrical machines,
power converters and the management of renewable energy sources.
N. Patin (S’06-M’07-SM’12) was born inChateauroux, France, in 1979. He receivedthe M.Sc. and Ph.D. degrees from the EcoleNormale Superieure de Cachan, France, in2004 and 2006, respectively. Since September2007, he has been an Associate Professor atthe Electromechanics Laboratory, University ofTechnology of Compiegne, France. His currentresearch interests include control strategiesof power converters, aging of DC capacitorsand electromagnetic compatibility, especially in
embedded applications.
E. Monmasson (M’96-SM’06) received the Ing.and Ph.D. degrees from the Ecole NationaleSuperieure d’Ingenieurs d’Electrotechniqued’Electronique d’Informatique et d’Hydrauliquede Toulouse, France, in 1989 and 1993,respectively. Since 2003, he is a Full Professorat the University of Cergy-Pontoise, France. Heis also with SATIE laboratory, UMR CNRS 8029,Cergy-Pontoise. He is the author or coauthor of3 books and more than 200 scientific papers. Hiscurrent research interests include the control of
power electronics, electrical motors and generators, and FPGA-basedand SoC-based industrial control systems. Dr. Monmasson was theChair of the technical committee on Electronic Systems-on-Chip of theIEEE Industrial Electronics Society (2008-2011). He is also a member ofthe steering committee of the European Power Electronics Associationand he was the Chair of the technical committee of the InternationalAssociation for Mathematics and Computers in Simulation (2011-2017).He is an Associate Editor of the IEEE-TIE and the IEEE-TII.