Embed Size (px)
Citation preview
Virtual Elements for Elasticity
L. Beirão da VeigaDepartment of Mathematics
University of Milan
in collaboration with:
F. Brezzi and D. Marini
CASSINO, February 2015
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 1 / 34
The Virtual Element Method
The Virtual Element Method (VEM) is a generalization of the FiniteElement Method that takes inspiration from modern Mimetic FiniteDifference schemes.
VEM allows to use very general polygonal and polyhedral meshes,also for high polynomial degrees and guaranteeing the patch test.In addition, it may lead to additional advantages, such as “easy tocode” highly regular spaces.
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 2 / 34
Why polygons/polyhedrons?
The interest (and use in commercial codes?) for polygons/polyhedra isrecently growing.
Immediate combination of tets and hexahedrons
Easier/better meshing of domain (and data) features
Automatic inclusion of “hanging nodes”
Adaptivity: more efficient mesh refinement/coarsening
Generate meshes with more local rotational simmetries
Robustness to distortion
.......
? for example CD-ADAPCO and ANSYS.
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 3 / 34

Some polytopal methods
Mimetic F.D. Shashkov, Lipnikov, Brezzi, Manzini, BdV, ....
HMM: Eymard, Droniou, ...
Polygonal FEM: Sukumar, Paulino, ...
Weak Galerkin FEM: Wang, ....
HHO: Ern, di Pietro
Polygonal DG: Cangiani, Houston, Georgoulis, ...
VEM: this talk !!!
..........
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 4 / 34
The linear elasticity problem
We consider the linear elasticity problem in two dimensions: − div(
2µ ε(u) + λ div(u) I)
= f in Ω
u = 0 on ∂Ω,
whereΩ ⊂ R2 is a polygonal domain;λ and µ are the Lamé coefficients in R+;the loading f is assumed component-wise in L2(Ω).
NOTE: When the ratio λ/µ >> 1 we fall into the range ofalmost-incompressible materials ...
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 5 / 34
Variational formulation
The variational formulation of the problem reads:Find u ∈ V such that
a(u,v) =< f ,v > ∀v ∈ V
where the spaceV := (H1
0 (Ω))2
and the bilinear forms
a(v ,w) := 2µ∫
Ωε(v) : ε(w) dx + λ
∫Ω
div v div w dx
=: 2µ aµ(v ,w) + λ aλ(v ,w).
NOTE: for given µ, λ the form a(·, ·) is symmetric, continuous andcoercive on V. The problem above is well posed.
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 6 / 34
A Virtual Element Method
We will build a discrete problem in following formfind uh ∈ Vh such thatah(uh,vh) =< f h,vh > ∀vh ∈ Vh,
whereVh ⊂ V is a finite dimensional space;ah(·, ·) : Vh ×Vh → R is a discrete bilinear form approximating thecontinuous form a(·, ·);< f h,vh > is a right hand side term approximating the load.
Let k ≥ 1 be a fixed integer index. Such index will represent thedegree of accuracy of the method.
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 7 / 34
A Virtual Element Method
We will build a discrete problem in following formfind uh ∈ Vh such thatah(uh,vh) =< f h,vh > ∀vh ∈ Vh,
whereVh ⊂ V is a finite dimensional space;ah(·, ·) : Vh ×Vh → R is a discrete bilinear form approximating thecontinuous form a(·, ·);< f h,vh > is a right hand side term approximating the load.
Let k ≥ 1 be a fixed integer index. Such index will represent thedegree of accuracy of the method.
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 7 / 34
The local spaces Vh|E
Let Th be a simple polygonal mesh on Ω. This can be anydecomposition of Ω in non overlapping polygons E with straight faces.
The space Vh will be defined element-wise, by introducinglocal spaces Vh|E ;the associated local degrees of freedom.
For all E ∈ Th:
Vh|E =
vh ∈ [H1(E) ∩ C0(E)]2 : −∆vh ∈ [Pk−2(E)]2,
vh|e ∈ [Pk (e)]2 ∀e ∈ ∂E.
the functions vh ∈ Vh|E are known explicitly on ∂E ;the functions vh ∈ Vh|E are unknown inside the element E !
it holds [Pk (E)]2 ⊆ Vh|E
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 8 / 34
The local spaces Vh|E
Let Th be a simple polygonal mesh on Ω. This can be anydecomposition of Ω in non overlapping polygons E with straight faces.
The space Vh will be defined element-wise, by introducinglocal spaces Vh|E ;the associated local degrees of freedom.
For all E ∈ Th:
Vh|E =
vh ∈ [H1(E) ∩ C0(E)]2 : −∆vh ∈ [Pk−2(E)]2,
vh|e ∈ [Pk (e)]2 ∀e ∈ ∂E.
the functions vh ∈ Vh|E are known explicitly on ∂E ;the functions vh ∈ Vh|E are unknown inside the element E !
it holds [Pk (E)]2 ⊆ Vh|E
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 8 / 34
The local spaces Vh|E
Let Th be a simple polygonal mesh on Ω. This can be anydecomposition of Ω in non overlapping polygons E with straight faces.
The space Vh will be defined element-wise, by introducinglocal spaces Vh|E ;the associated local degrees of freedom.
For all E ∈ Th:
Vh|E =
vh ∈ [H1(E) ∩ C0(E)]2 : −∆vh ∈ [Pk−2(E)]2,
vh|e ∈ [Pk (e)]2 ∀e ∈ ∂E.
the functions vh ∈ Vh|E are known explicitly on ∂E ;the functions vh ∈ Vh|E are unknown inside the element E !
it holds [Pk (E)]2 ⊆ Vh|E
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 8 / 34
Degrees of freedom for Vh|E
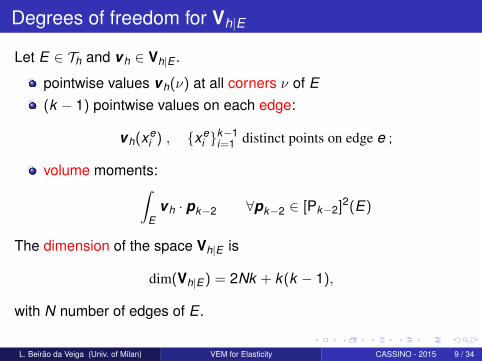
Let E ∈ Th and vh ∈ Vh|E .
pointwise values vh(ν) at all corners ν of E(k − 1) pointwise values on each edge:
vh(xei ) , xe
i k−1i=1 distinct points on edge e ;
volume moments:∫E
vh · pk−2 ∀pk−2 ∈ [Pk−2]2(E)
The dimension of the space Vh|E is
dim(Vh|E ) = 2Nk + k(k − 1),
with N number of edges of E .
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 9 / 34
Degrees of freedom for Vh|E
Let E ∈ Th and vh ∈ Vh|E .
pointwise values vh(ν) at all corners ν of E(k − 1) pointwise values on each edge:
vh(xei ) , xe
i k−1i=1 distinct points on edge e ;
volume moments:∫E
vh · pk−2 ∀pk−2 ∈ [Pk−2]2(E)
The dimension of the space Vh|E is
dim(Vh|E ) = 2Nk + k(k − 1),
with N number of edges of E .
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 9 / 34
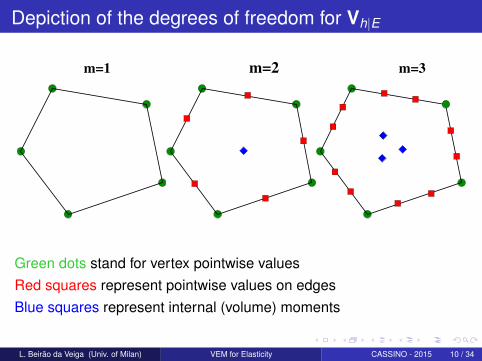
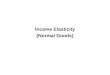
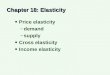
Depiction of the degrees of freedom for Vh|E
m=1 m=2 m=3
Green dots stand for vertex pointwise valuesRed squares represent pointwise values on edgesBlue squares represent internal (volume) moments
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 10 / 34
The space Vh and the form ah(·, ·)
The global space Vh is built by assembling the local spaces Vh|E asusual:
Vh = v ∈ V : v |E ∈ Vh|E ∀E ∈ Th.
The bilinear form ah(·, ·) is built element by element
ah(vh,wh) =∑
E∈Th
aEh (vh,wh) ∀vh, wh ∈ Vh,
whereaE
h (·, ·) : Vh|E × Vh|E −→ R
are symmetric bilinear forms that approximate
aEh (·, ·) ' a(·, ·)|E .
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 11 / 34
The space Vh and the form ah(·, ·)
The global space Vh is built by assembling the local spaces Vh|E asusual:
Vh = v ∈ V : v |E ∈ Vh|E ∀E ∈ Th.
The bilinear form ah(·, ·) is built element by element
ah(vh,wh) =∑
E∈Th
aEh (vh,wh) ∀vh, wh ∈ Vh,
whereaE
h (·, ·) : Vh|E × Vh|E −→ R
are symmetric bilinear forms that approximate
aEh (·, ·) ' a(·, ·)|E .
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 11 / 34
Building the local bilinear forms
We recall the exact local form
aE (v ,w) := 2µ∫
Eε(v) : ε(w) + λ
∫E
div(v) div(w)
=: 2µ aEµ (v ,w) + λ aE
λ (v ,w).
Analogously we will introduce
aEh (vh,wh) := 2µ aE
h,µ(vh,wh) + λ aEh,λ(vh,wh),
for all vh,wh in Vh|E .
NOTE: we do not have a completely explicit expression for thefunctions in Vh|E !
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 12 / 34
Bilinear form aEh,λ(·, ·)
Note that ∀vh ∈ Vh|E and ∀p ∈ Pk−1(E) we can compute∫E
div(vh) p = −∫
Evh ·∇p +
∫∂E
(vh · nE )p .
Therefore we can compute the L2 projection of div(vh) on Pk−1(E):Π0
k−1(div(vh)
)∈ Pk−1(E)∫
E
(Π0
k−1div(vh))
p =
∫E
div(vh) p ∀p ∈ Pk−1(E).
We simply define, for all vh,wh ∈ Vh|E ,
aEh,λ(vh,wh) :=
∫E
Π0k−1(div(vh)
)Π0
k−1(div(wh)
).
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 13 / 34
Bilinear form aEh,λ(·, ·)
Note that ∀vh ∈ Vh|E and ∀p ∈ Pk−1(E) we can compute∫E
div(vh) p = −∫
Evh ·∇p +
∫∂E
(vh · nE )p .
Therefore we can compute the L2 projection of div(vh) on Pk−1(E):Π0
k−1(div(vh)
)∈ Pk−1(E)∫
E
(Π0
k−1div(vh))
p =
∫E
div(vh) p ∀p ∈ Pk−1(E).
We simply define, for all vh,wh ∈ Vh|E ,
aEh,λ(vh,wh) :=
∫E
Π0k−1(div(vh)
)Π0
k−1(div(wh)
).
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 13 / 34
Bilinear form aEh,λ(·, ·)
Note that ∀vh ∈ Vh|E and ∀p ∈ Pk−1(E) we can compute∫E
div(vh) p = −∫
Evh ·∇p +
∫∂E
(vh · nE )p .
Therefore we can compute the L2 projection of div(vh) on Pk−1(E):Π0
k−1(div(vh)
)∈ Pk−1(E)∫
E
(Π0
k−1div(vh))
p =
∫E
div(vh) p ∀p ∈ Pk−1(E).
We simply define, for all vh,wh ∈ Vh|E ,
aEh,λ(vh,wh) :=
∫E
Π0k−1(div(vh)
)Π0
k−1(div(wh)
).
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 13 / 34
Bilinear form aEh,µ(·, ·)
Note that ∀vh ∈ Vh|E and ∀p ∈ [Pk (E)]2 we can compute
aEµ (vh,p) =
∫Eε(vh) : ε(p) = −
∫E
vh · div(ε(p)
)+
∫∂E
vh ·(ε(p)nE
).
Thus we can compute the “aµ” projection of vh on [Pk (E)]2:Πa
k (vh) ∈ [Pk (E)]2
aEµ (Πa
k (vh),p) = aEµ (vh,p) ∀p ∈ [Pk (E)]2
Fix the kernel part
For instance, we can fix the kernel
span(
10
),
(01
),
(−yx
)by using an euclidean scalar product on the d.o.f. values.
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 14 / 34
Bilinear form aEh,µ(·, ·)
Note that ∀vh ∈ Vh|E and ∀p ∈ [Pk (E)]2 we can compute
aEµ (vh,p) =
∫Eε(vh) : ε(p) = −
∫E
vh · div(ε(p)
)+
∫∂E
vh ·(ε(p)nE
).
Thus we can compute the “aµ” projection of vh on [Pk (E)]2:Πa
k (vh) ∈ [Pk (E)]2
aEµ (Πa
k (vh),p) = aEµ (vh,p) ∀p ∈ [Pk (E)]2
Fix the kernel part
For instance, we can fix the kernel
span(
10
),
(01
),
(−yx
)by using an euclidean scalar product on the d.o.f. values.
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 14 / 34

Bilinear form aEh,µ(·, ·)
It clearly holds, for all vh,wh in Vh|E :
aEµ (vh,wh) = aE
µ (Πak (vh),Πa
k (wh)) + aEµ (vh − Πa
k (vh),wh − Πak (wh)) .
We define
aEh,µ(vh,wh) := aE
µ (Πak (vh),Πa
k (wh)) + sE (vh − Πak (vh),wh − Πa
k (wh))
where the bilinear form sE (·, ·) is only required to scale correctly.
For instance, for all vh,wh in Vh|E ,
sE (vh,wh) = 2µ#dofs∑i=1
dofi(vh)dofi(wh).
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 15 / 34
Bilinear form aEh,µ(·, ·)
It clearly holds, for all vh,wh in Vh|E :
aEµ (vh,wh) = aE
µ (Πak (vh),Πa
k (wh)) + aEµ (vh − Πa
k (vh),wh − Πak (wh)) .
We define
aEh,µ(vh,wh) := aE
µ (Πak (vh),Πa
k (wh)) + sE (vh − Πak (vh),wh − Πa
k (wh))
where the bilinear form sE (·, ·) is only required to scale correctly.
For instance, for all vh,wh in Vh|E ,
sE (vh,wh) = 2µ#dofs∑i=1
dofi(vh)dofi(wh).
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 15 / 34
Bilinear form aEh,µ(·, ·)
It clearly holds, for all vh,wh in Vh|E :
aEµ (vh,wh) = aE
µ (Πak (vh),Πa
k (wh)) + aEµ (vh − Πa
k (vh),wh − Πak (wh)) .
We define
aEh,µ(vh,wh) := aE
µ (Πak (vh),Πa
k (wh)) + sE (vh − Πak (vh),wh − Πa
k (wh))
where the bilinear form sE (·, ·) is only required to scale correctly.
For instance, for all vh,wh in Vh|E ,
sE (vh,wh) = 2µ#dofs∑i=1
dofi(vh)dofi(wh).
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 15 / 34
Bilinear form aEh,µ(·, ·)
The bilinear form satisfies the following.
Consistency:
aEh,µ(p,vh) = aE
µ (p,vh) ∀vh ∈ Vh|E , ∀p ∈ [Pk (E)]2 .
Stability:There exist α?, α? ∈ R+ such that
α?aEµ (vh,p) ≤ aE
h,µ(vh,p) ≤ α?aEµ (vh,p) ∀vh ∈ Vh|E .
NOTE: in order for α?, α? to be uniform (element-independent) somemesh regularity assumptions are needed (eg. star-shaped with respectto a ball, minimal edge length condition).
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 16 / 34
Bilinear form aEh,µ(·, ·)
The bilinear form satisfies the following.
Consistency:
aEh,µ(p,vh) = aE
µ (p,vh) ∀vh ∈ Vh|E , ∀p ∈ [Pk (E)]2 .
Stability:There exist α?, α? ∈ R+ such that
α?aEµ (vh,p) ≤ aE
h,µ(vh,p) ≤ α?aEµ (vh,p) ∀vh ∈ Vh|E .
NOTE: in order for α?, α? to be uniform (element-independent) somemesh regularity assumptions are needed (eg. star-shaped with respectto a ball, minimal edge length condition).
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 16 / 34
The discrete load term
We consider k ≥ 2 first. Let, for all E ∈ Th, the approximated load f h|Ebe the L2-projection of f |E on Pk−2(E) .
Then(f h,vh)h :=
∑E∈Th
∫E
f hvh
that is computable due to the internal dofs of Vh|E .
In the case k = 1 a simple integration rule based on the vertex valuesof the polygon can be used, for instance
(f h,vh)h :=∑
E∈Th
(∫E
f) 1
NE
∑ν∈∂E
vh(ν).
Note: for k = 2 better choices can be made.
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 17 / 34
A λ−uniform convergence result
Mesh assumptions: let every element E be star-shaped with respect toa ball of radius ≥ ρhE , and let every two vertexes be at least ρhEdistance apart (ρ fixed for the whole mesh family).
Theorem: [BdV, Brezzi, Marini, 2013]It holds the error estimate
||u − uh||H1(Ω) ≤ Chs|u|Hs+1(Ω) , 1 ≤ s ≤ k ,
with C independent of λ if k ≥ 2.
NOTE: and inf-sup condition holds for k ≥ 2, granting theindependence from λ. In the case k = 1 there exists a class of meshesfor which the inf-sup holds (see [BdV, Lipnikov, 2010]).
NOTE: it immediately extends to the Stokes problem!
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 18 / 34
A λ−uniform convergence result
Mesh assumptions: let every element E be star-shaped with respect toa ball of radius ≥ ρhE , and let every two vertexes be at least ρhEdistance apart (ρ fixed for the whole mesh family).
Theorem: [BdV, Brezzi, Marini, 2013]It holds the error estimate
||u − uh||H1(Ω) ≤ Chs|u|Hs+1(Ω) , 1 ≤ s ≤ k ,
with C independent of λ if k ≥ 2.
NOTE: and inf-sup condition holds for k ≥ 2, granting theindependence from λ. In the case k = 1 there exists a class of meshesfor which the inf-sup holds (see [BdV, Lipnikov, 2010]).NOTE: it immediately extends to the Stokes problem!
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 18 / 34
Construction of the stiffness matrix for aEh,µ(·, ·)
It is immediate to check that ∀ vh,wh ∈ Vh|E
aEµ (vh,wh) = aE
µ (Πakvh,Π
akwh) + aE
µ ((I − Πak )vh, (I − Πa
k )wh).
Then the bilinear form
aEh,µ(vh,wh) = aE
µ (Πakvh,Π
akwh) + sE ((I − Πa
k )vh, (I − Πak )wh)
is consistent and stable, provided the positive bilinear formsE : Vh|E × Vh|E → R scales like the original bilinear form a.
Let now the local stiffness matrix ME
MEij := aE
h,µ(φi , φj) ∀i , j = 1,2, ...,N
with φi the canonical basis associated to the degrees of freedom.
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 19 / 34
Construction of the stiffness matrix for aEh,µ(·, ·)
It is immediate to check that ∀ vh,wh ∈ Vh|E
aEµ (vh,wh) = aE
µ (Πakvh,Π
akwh) + aE
µ ((I − Πak )vh, (I − Πa
k )wh).
Then the bilinear form
aEh,µ(vh,wh) = aE
µ (Πakvh,Π
akwh) + sE ((I − Πa
k )vh, (I − Πak )wh)
is consistent and stable, provided the positive bilinear formsE : Vh|E × Vh|E → R scales like the original bilinear form a.
Let now the local stiffness matrix ME
MEij := aE
h,µ(φi , φj) ∀i , j = 1,2, ...,N
with φi the canonical basis associated to the degrees of freedom.
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 19 / 34
Construction of the stiffness matrix
We introduce also mαnα=1 a basis for the polynomial space
[Pk ]2 = spanmαnα=1.
Since Pm ⊆ Vh|E , the matrix
D =
dof1(m1) dof1(m2) . . . dof1(mn)dof2(m1) dof2(m2) . . . dof2(mn)
......
. . ....
dofN(m1) dofN(m2) . . . dofN(mn)
.expresses the mα in terms of the Vh|E basis.
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 20 / 34
Construction of the stiffness matrix
We have also a matrix
B =
~Pkerφ1 . . . ~PkerφN
aE (m2, φ1) . . . aE (m2, φN)...
. . ....
aE (mn, φ1) . . . aE (mn, φN)
expressing (in terms of the bases) the right hand side in the definition
aE (Πvh,p) = aE (vh,p) ∀p ∈ Pm(E)/RP0(Πvh) = P0(vh)
NOTE: such matrix is computable! (integration by parts and d.o.f.sdefinition)
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 21 / 34
Construction of the stiffness matrix
Let
G = BD =
~Pkerm1
~Pkerm2 . . . ~Pkermn0
(∇m2,∇m2
)0,P . . .
(∇m2,∇mn
)0,P
......
. . ....
0(∇mn,∇m2
)0,P . . .
(∇mn,∇mn
)0,P
.
Compute the matrices corresponding to the projection operator:
Π? = (G)−1B , Π = DΠ?.
Finally compute the local stiffness matrix
ME = ΠT? GΠ? + (I−Π)T (I−Π),
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 22 / 34
Construction of the stiffness matrix
Let
G = BD =
~Pkerm1
~Pkerm2 . . . ~Pkermn0
(∇m2,∇m2
)0,P . . .
(∇m2,∇mn
)0,P
......
. . ....
0(∇mn,∇m2
)0,P . . .
(∇mn,∇mn
)0,P
.Compute the matrices corresponding to the projection operator:
Π? = (G)−1B , Π = DΠ?.
Finally compute the local stiffness matrix
ME = ΠT? GΠ? + (I−Π)T (I−Π),
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 22 / 34
Construction of the stiffness matrix
Let
G = BD =
~Pkerm1
~Pkerm2 . . . ~Pkermn0
(∇m2,∇m2
)0,P . . .
(∇m2,∇mn
)0,P
......
. . ....
0(∇mn,∇m2
)0,P . . .
(∇mn,∇mn
)0,P
.Compute the matrices corresponding to the projection operator:
Π? = (G)−1B , Π = DΠ?.
Finally compute the local stiffness matrix
ME = ΠT? GΠ? + (I−Π)T (I−Π),
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 22 / 34
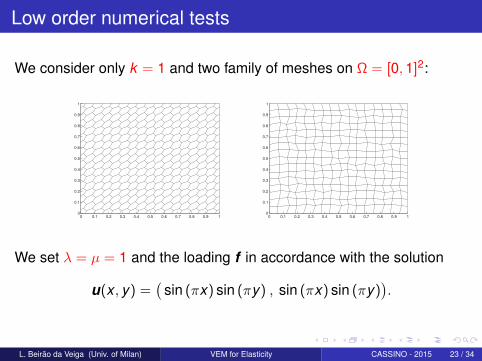
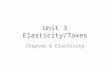
Low order numerical tests
We consider only k = 1 and two family of meshes on Ω = [0,1]2:
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
We set λ = µ = 1 and the loading f in accordance with the solution
u(x , y) =(
sin (πx) sin (πy) , sin (πx) sin (πy)).
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 23 / 34
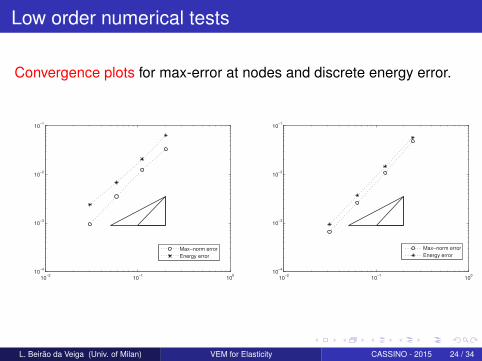
Low order numerical tests
Convergence plots for max-error at nodes and discrete energy error.
10−2
10−1
100
10−4
10−3
10−2
10−1
Max−norm error
Energy error
10−2
10−1
100
10−4
10−3
10−2
10−1
Max−norm error
Energy error
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 24 / 34
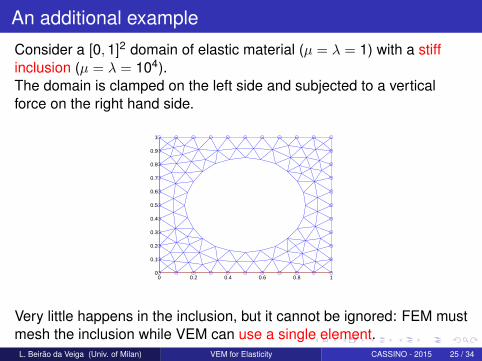
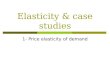
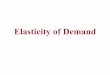
An additional example
Consider a [0,1]2 domain of elastic material (µ = λ = 1) with a stiffinclusion (µ = λ = 104).The domain is clamped on the left side and subjected to a verticalforce on the right hand side.
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Very little happens in the inclusion, but it cannot be ignored: FEM mustmesh the inclusion while VEM can use a single element.
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 25 / 34
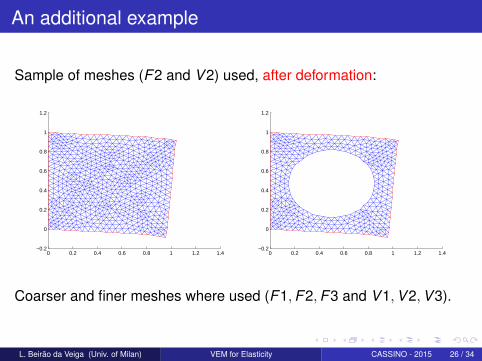
An additional example
Sample of meshes (F2 and V2) used, after deformation:
0 0.2 0.4 0.6 0.8 1 1.2 1.4−0.2
0
0.2
0.4
0.6
0.8
1
1.2
0 0.2 0.4 0.6 0.8 1 1.2 1.4−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Coarser and finer meshes where used (F1,F2,F3 and V1,V2,V3).
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 26 / 34
An additional example
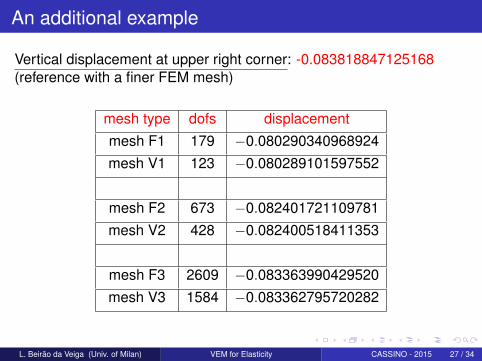
Vertical displacement at upper right corner: -0.083818847125168(reference with a finer FEM mesh)
mesh type dofs displacementmesh F1 179 −0.080290340968924mesh V1 123 −0.080289101597552
mesh F2 673 −0.082401721109781mesh V2 428 −0.082400518411353
mesh F3 2609 −0.083363990429520mesh V3 1584 −0.083362795720282
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 27 / 34
Nonlinear elasticity and inelasticity
Together with C. Lovadina and D. Mora, we are currently developingthe VEM method for small deformation problems in structuralmechanics.
Without showing the details of the construction, we here present somepreliminary test for k = 1 and the following models:
Henky-Mises nonlinear elasticityVon Mises plasticity with linear isotropic and kinematic hardening
NOTE: the method is built in such a way to include (automatically)general “black-box” constitutive algorithms, that are applied only onceper element (similar to single Gauss point integration).
uh|E −→ Π0Eε(uh) −→ σE
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 28 / 34
Henky-Mises elasticity
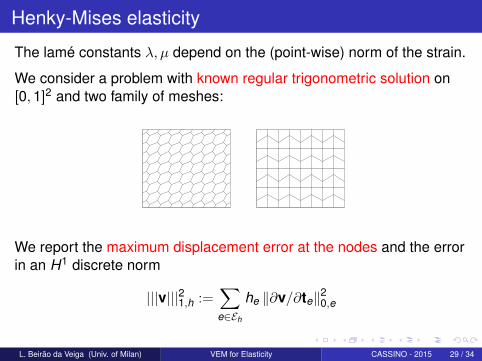
The lamé constants λ, µ depend on the (point-wise) norm of the strain.
We consider a problem with known regular trigonometric solution on[0,1]2 and two family of meshes:
We report the maximum displacement error at the nodes and the errorin an H1 discrete norm
|||v|||21,h :=∑e∈Eh
he ‖∂v/∂te‖20,e
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 29 / 34
Henky-Mises elasticity
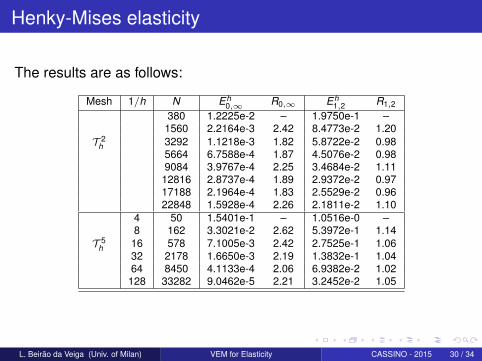
The results are as follows:
Mesh 1/h N Eh0,∞ R0,∞ Eh
1,2 R1,2
380 1.2225e-2 – 1.9750e-1 –1560 2.2164e-3 2.42 8.4773e-2 1.20
T 2h 3292 1.1218e-3 1.82 5.8722e-2 0.98
5664 6.7588e-4 1.87 4.5076e-2 0.989084 3.9767e-4 2.25 3.4684e-2 1.11
12816 2.8737e-4 1.89 2.9372e-2 0.9717188 2.1964e-4 1.83 2.5529e-2 0.9622848 1.5928e-4 2.26 2.1811e-2 1.10
4 50 1.5401e-1 – 1.0516e-0 –8 162 3.3021e-2 2.62 5.3972e-1 1.14
T 5h 16 578 7.1005e-3 2.42 2.7525e-1 1.06
32 2178 1.6650e-3 2.19 1.3832e-1 1.0464 8450 4.1133e-4 2.06 6.9382e-2 1.02128 33282 9.0462e-5 2.21 3.2452e-2 1.05
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 30 / 34
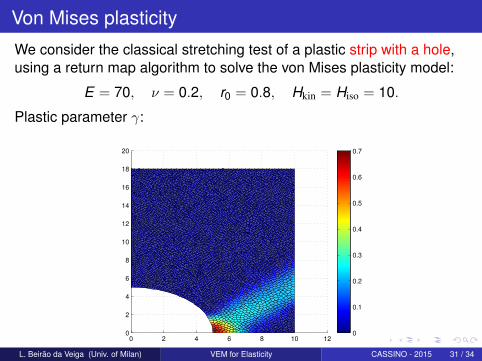
Von Mises plasticity
We consider the classical stretching test of a plastic strip with a hole,using a return map algorithm to solve the von Mises plasticity model:
E = 70, ν = 0.2, r0 = 0.8, Hkin = Hiso = 10.
Plastic parameter γ:
0 2 4 6 8 10 120
2
4
6
8
10
12
14
16
18
20
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 31 / 34
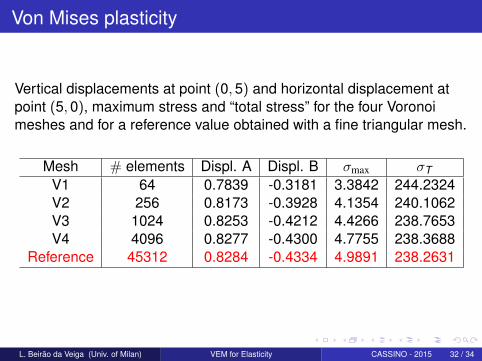
Von Mises plasticity
Vertical displacements at point (0,5) and horizontal displacement atpoint (5,0), maximum stress and “total stress” for the four Voronoimeshes and for a reference value obtained with a fine triangular mesh.
Mesh # elements Displ. A Displ. B σmax σTV1 64 0.7839 -0.3181 3.3842 244.2324V2 256 0.8173 -0.3928 4.1354 240.1062V3 1024 0.8253 -0.4212 4.4266 238.7653V4 4096 0.8277 -0.4300 4.7755 238.3688
Reference 45312 0.8284 -0.4334 4.9891 238.2631
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 32 / 34
A note on the literature
Basic paper on VEM: [BdV, Brezzi, Cangiani, Manzini, Marini,Russo: M3AS, 2013]Guide to coding: [BdV, Brezzi, Marini, Russo: M3AS, 2014]Linear elasticity: [BdV, Brezzi, Marini: SINUM, 2013]Small deformations (nonlinear): [BdV, Lovadina, Mora: inpreparation]NOT CITED: diffusion problem in mixed form, Stokes problem,Kirchhoff plates, wave propagation, DFN simulation, eigenvalueproblems, topology optimization, contact problems, relation withother methods... [B. Ayuso, S. Berrone, S. Bordas, G. Gatica, D.Mora, G. Paulino, I. Perugia, R. Rodriguez, C. Talischi, P.Wriggers, ...]
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 33 / 34
Conclusions
We presented a Virtual Element Method for linear elasticity:
(local) discrete spacesdegrees of freedombuilding the discrete bilinear forms
The discrete bilinear forms where shown to be k-consistent andstable
The method was shown to be convergent and free of volumetriclocking.
We have shown first extensions to the nonlinear case.
Virtual Elements is a very recent technology, that we believe to befull of potential!
L. Beirão da Veiga (Univ. of Milan) VEM for Elasticity CASSINO - 2015 34 / 34












![Topic 4 Elasticity - Trinity College, Dublin · PDF filePrice Elasticity of Demand ... Price Elasticity of Supply ... Microsoft PowerPoint - Topic 4 Elasticity [Compatibility Mode]](https://img.pdfslide.us/doc/110x75/5ab680a27f8b9a6e1c8dc1e4/topic-4-elasticity-trinity-college-dublin-elasticity-of-demand-price-elasticity.jpg)