-
8/8/2019 Vessel Linear
1/134
Vessel-basedregistrationwithapplicationtonoduledetection
inthoracicCTscans
ChanghuaWuaandGady
Agamb
aDepartmentofScienceandMathematics,KetteringUniversity,Flint,MI
48504bDepartmentofComputerScience,IllinoisInstituteofTechnology,Chicago,IL
60616
ABSTRACT
Volumeregistrationisfundamentaltomultiplemedical
imagingalgorithms.Speci
-
8/8/2019 Vessel Linear
2/134
cally,non-rigidregistrationofthoracicCTscans
takenatdierenttimeinstancescanbeusedtodetectnewnodules
morereliablyandassessthegrowthrateofexistingnodules.Voxel-basedregistrationtechniques
aregenerallysensitivetointensityvariationandstructuraldierences,whicharecommoninCTscansduetopartialvolumeeectsandnaturallyoccurringmotionand
deformations.Theapproach
-
8/8/2019 Vessel Linear
3/134
-
8/8/2019 Vessel Linear
4/134
-
8/8/2019 Vessel Linear
5/134
eldusingthinplatesplines.Theproposed
approachisevaluatedonbothrealandsyntheticallydeformedvolumes.Theobtained
resultsarecomparedtoseveralstandardregistrationtechniques.Itisshownthatby
usingvesselstructure,theproposedapproachresultsinimprovedperformance.
1.INTRODUCTIONSuccessfulregistrationisfundamentaltothefusionofmedicalimagesand
thediagnosisof
-
8/8/2019 Vessel Linear
6/134
abnormalstructuresfromtemporalimages.Computerizedvolumetric
warpingandregistrationof3Dlungimagescanprovideobjective,accurate,
andreproduciblemeasurestotheunderstandingofthelungstructureandfunction.It
isalsoinvaluabletotheassessmentofthepresenceofdiseasesandtheirresponsetotherapies.Intheautomatedcomputerdiagnosisofnodules,thedierence
betweentemporalCT
-
8/8/2019 Vessel Linear
7/134
scansafterregistrationcanbeusedto
trackthedevelopmentofexistingnodulesanddetectnewones.1,2The
changeinsizeandintensitycanbeusedtotellwhetheranodule
ismalignantorbenign.3Registrationcanbeusedtoestimateregionallungexpansion,4breathingmotion,5,6andstructure-functionrelationships.7,8Itcanalsobeused
toreducethe
-
8/8/2019 Vessel Linear
8/134
falsepositiveinnoduledetection.9,10
Howeveronlylimitedworkthattargetstheaccurateregistrationoflung
volumeshasbeendone.Somework2usedtheiterativeclosestpoint(ICP)to
registerthecontoursoflungvolumes.ZhangLi11developeda3Dsurface-basedregistrationtechniquetoregisterpulmonaryCTvolumes.Theregistrationincludesaglobal
transformationanda
-
8/8/2019 Vessel Linear
9/134
localelastictransformationbysubdividingtheimage
andatlasvolumeintosub-imagescalledcubes.Thedisplacementvectorsofeach
cubeareprocessedusingBurr'sdynamicmodeltogiveasmootheddeformationvector
foreachvoxelintheimage.However,thisapproachisentirelydependentontheintensityinformationandmakesnouseofaprioriknowledgeof
thelungstructure
-
8/8/2019 Vessel Linear
10/134
suchasthevesselnetwork.Someresearchers
trytoestimatethetransformation
-
8/8/2019 Vessel Linear
11/134
eldby
-
8/8/2019 Vessel Linear
12/134
ndingmatchesofthejunctionsofvessels
andairwaysinthelungvolume.FanLi12,13proposedaninterpolation
methodforobtainingdensetransformation
-
8/8/2019 Vessel Linear
13/134
eldfromsparsedisplacementvectorsobtainedby
trackingthebronchialpointsofairways.Thedensetransformation
-
8/8/2019 Vessel Linear
14/134
eldisobtainedbyminimizinganobject
functionbasedonamodelofcontinuummechanicsandanisotropicsmoothnessconstraints.
Thisapproachassumesthattheintensityofapointinthelungdoes
notchangeinallscans.Howeverthisisnotalwaystrue,especiallyinthickCTscansduetothepartialvolumeeect.Prado14proposeda
sequentialpolynomialregistration
-
8/8/2019 Vessel Linear
15/134
schemetointeractivelyregisterlungvolumes.The
coecientsofthepolynomialfunctionareupdatedbyaddingcontrolpointsmanually.
Duetothelimiteddegree,thepolynomialfunctionmaynotbecapableof
accuratelydescribingthenon-rigiddeformationbetweenlungvolumes.Moreover,themanual
E-mail:[email protected],[email protected]
-
8/8/2019 Vessel Linear
16/134
interactionmayintroduceerrorinthe
positionofcontrolpointsandalsoreducestheeciency.Shikata15proposeda
lungregistrationmethodbymatchingbifurcationpointsfromareconstructedvessel-tree.However,it
onlyestimatedarigidtransformation
-
8/8/2019 Vessel Linear
17/134
eldwhiletherealtransformationbetweenlung
volumesisnon-rigid.Finally,BaojunLi7proposedamethodtocombinethe
junctionsofairwaywithintensityconsistency.Inhismethod,thesimilaritybetweenjunctions
andvoxelsaremeasuredbyasetofcostfunctions,whichareminimizedtogetthe
-
8/8/2019 Vessel Linear
18/134
naltransformation
-
8/8/2019 Vessel Linear
19/134
eld.However,thematchingbetweenjunctionsis
manuallyestablished,whichreducesitseciencyandmakesitunsuitableforautomated
lungregistration.Furthermore,itishardtoavoidlocalminimuminthe
minimizationofthecostfunctions.
Inthispaper,anautomaticregistrationmethodbasedonthestructureofvesselsisproposed.Thispaperis
organizedasfollows.
-
8/8/2019 Vessel Linear
20/134
-
8/8/2019 Vessel Linear
21/134
eld,incorporationofsmoothnessandvessel-basedconstraints
arediscussedinthissection.Section3discussestheevaluationofthe
proposedmethod.Section4presentstheconclusionandoutlinesthefuturework.
2.THEPROPOSEDAPPROACHBloodvesselsareprominentfeaturesinthoracicCTscans.Thenetworkofvesselscoversmostofthevolume,whichmakes
vesselsgoodlandmarks
-
8/8/2019 Vessel Linear
22/134
intheregistrationoflungvolumes.In
thissection,ageneralregistrationalgorithmthatusesvessel-basedlandmarkstoregister
CTvolumesisproposed.Theproposedregistrationalgorithmusesbothjunctionsandvessels
toestimatethenon-rigidtransformationbetweenvolumes.Falsematchingofjunctionsareremovedbysmoothnessconstraintusingthecurvaturesofthetransformation
-
8/8/2019 Vessel Linear
23/134
eld.Thentheregistrationisfurtherimproved
byincorporatingthelinearvesselsegmentswhosematchesarefoundbyactively
deformingtheircenterlinestotheirmatches.Thissectionisorganizedasfollows.
Section2.1discussestheinitialalignment.Junctiondetectionisdiscussedinsection2.2.Section2.3introducesthin-platesplines(TPSs),whichareusedintheinterpolation
ofthetransformation
-
8/8/2019 Vessel Linear
24/134
-
8/8/2019 Vessel Linear
25/134
eld.Section2.4discussestheenforcementof
smoothnessconstraintsonthetransformation
-
8/8/2019 Vessel Linear
26/134
eld.Section2.5discussestheincorporationof
vesselconstraints.
2.1.InitialalignmentAtthebeginning,thesource
andthetargetvolumesareinitiallyalignedthroughananetransformation.Thisinitial
alignmentreducesthesearchingspacein
-
8/8/2019 Vessel Linear
27/134
-
8/8/2019 Vessel Linear
28/134
centersofboththesourceand
xyz
targetvolumestotheiroriginsrespectivelyaregivenby:
..
I..cI..c.
T=
;T.=(1)
0101
whereIisan33identitymatrix.
Therotationandscalingcomponents
areestimatedfrom
-
8/8/2019 Vessel Linear
29/134
-
8/8/2019 Vessel Linear
30/134
-
8/8/2019 Vessel Linear
31/134
-
8/8/2019 Vessel Linear
32/134
nedbyPandP.are
givenby
..1..1
p1p2p30
ppp0
R.123
R=,=(3)
0001
0001
-
8/8/2019 Vessel Linear
33/134
LetE=f1;2;3gTandE.
=f.1;2.;.3gTbetheeigenvaluescorrespondingtothe
eigenvectorsinPandP..ThescalingmatricesSandS.
thattransformboththesourceandtargetvolumestoaunitvolumearegivenby:
23..1..3..1
10
0010
-
8/8/2019 Vessel Linear
34/134
00.7...02
00000
6.S..27
S=
,=(4)
.00305.00.3
0.00010001
UsingthematricesabovetonormalizethesourcevolumeIsandthetargetvolumeIt,wegetSRTIs
=S0R0T0It.
-
8/8/2019 Vessel Linear
35/134
SotheanetransformationmatrixMathat
alignsIstoItis:
..1
Ma=(S.R0T
0)SRT(5)
2.2.LandmarkselectionTherearetwogeneralapproachesin
imageregistration,voxel-basedapproachesandlandmark-basedapproaches.Thevoxel-basedapproachesusetheintensityofallvoxelsintheoverlappingarea.Similaritymeasuressuchasmutual
informationandintensity
-
8/8/2019 Vessel Linear
36/134
-
8/8/2019 Vessel Linear
37/134
landmarksaremanuallyselected.Voxel-basedapproachestreat
voxelsoftissueandstructuresinthesamewaywhilelandmark-basedapproaches
givehigherweighttostructures.Voxel-basedapproachesarealsomoresensitivetonoise
andintensityvariation.
SincevesselsintheCTscanscanbeeasilyobtainedafterenhancement16,17andwecaremoreabouttheaccurate
registrationofvessels
-
8/8/2019 Vessel Linear
38/134
-
8/8/2019 Vessel Linear
39/134
edandmatched.Second,theyshouldbe
spatiallydistributedasuniformlyaspossibletoprovideadequateinformationthroughoutthe
volume.Accordingtothesecriteria,junctionsofvesselsareidealcandidates.Theyhave
beenwidelyusedinimageregistration.15,18Afterenhancement,vesselscanbesegmentedbyasimplethresholding.Linearvesselsegmentscanbeobtainedbytracing
alongvesseldirections
-
8/8/2019 Vessel Linear
40/134
untiljunctionsaremet.Intheproposed
approach,junctionsaredetectedbycheckingtheeigenvaluesofthegradientcorrelation
matrix.Let1.2betheeigenvaluesofthematrix.Itis
assumedthatforlinearvesselsegments,2isneartozeroand
1ismuchbiggerthan2,therefore2=1isverysmall.Soto
detectjunctions,we
-
8/8/2019 Vessel Linear
41/134
onlyneedtocheckthevalueof
2=1.Ifitislargerthanathreshold,thenajunctionis
detected.Toensurethattheselectedjunctionsareuniformlydistributedinthevolume,
apost-processisappliedtoremovejunctionsthataretooclosetoeachothersothatthedistancebetweenanytwojunctionsisabovea
minimumdistance(30
-
8/8/2019 Vessel Linear
42/134
-
8/8/2019 Vessel Linear
43/134
ndamatch.Thesimilaritybetweenjunctions
ismeasuredbyintensitycorrelationina1010window.To
improvetheaccuracyofregistration,onlythosejunctionpairswithhighcorrelation(top
50%amongallmatchingpairsofjunctions)arekept.Theremainingjunctionpairsarethenusedtogenerateasmoothtransformation
-
8/8/2019 Vessel Linear
44/134
eldthroughthin-platesplineinterpolation.
2.3.Interpolationofthetransformation
-
8/8/2019 Vessel Linear
45/134
eldIntheproposedapproach,thetransformation
-
8/8/2019 Vessel Linear
46/134
eldisinterpolatedusingthin-platesplines(TPSs),
whichbelongtoafamilyofsplinesbasedonradialbasisfunctions.
TPShasbeenformulatedbyDuchon19andMeinguet20forsurfaceinterpolationofscattered
data.TPSmodelsthedeformationofathinmetalplateunderexternalforces.ThesurfaceinterpolatedbyTPSpassesthroughthecontrolpoints.Eachcontrol
pointhasglobal
-
8/8/2019 Vessel Linear
47/134
inuenceontheshapeoftheinterpolated
surface.InrecentyearsTPShasbeenwidelyusedinimageregistration.21{23
Thede
-
8/8/2019 Vessel Linear
48/134
nitionofTPSisalinearcombination
ofnradialbasisfunctions(s):
n
t(x,
y,z)=a1+a2x+a3y+a4z+bj(jj-(x,
y,z)j)(6)j=1
-
8/8/2019 Vessel Linear
49/134
De
-
8/8/2019 Vessel Linear
50/134
ningthetransformationasthreeseparatethin-plate
splinefunctionsT=(t1;t2;t3)Tyieldsamappingbetweenimagesinwhichthe
coecientsa1,a2,a3anda4characterizetheanepartofthetransformation
whilethecoecientsfbjgj=1:::ncharacterizethenon-anepartofthetransformation.Thencontrolpointsformasetof3nlinearequations.Todeterminethe
3(n+4)
-
8/8/2019 Vessel Linear
51/134
coecientsuniquely,twelveadditionalequationsarerequired.
Thesetwelveequationsguaranteethatthenon-anecoecientsfbjgj=1:::nsumtozero
andthattheircrossproductswiththex,yandzcoordinatesofthe
controlpointsarelikewisezero.Inmatrixformthiscanbeexpressedas
.
.
.
.
.
.
.
.b.
=(7)T
-
8/8/2019 Vessel Linear
52/134
0a0
Herea
isa43matrixoftheanecoecientsa1,a2,a3
anda4,bisan3matrixofthenon-anecoecientsfbjgj=1:::n,
and.isthekernelmatrixwithij=(ji-jj).Solvingforaandbusingstandardalgebrayieldsathin-platespline
transformationthatwill
-
8/8/2019 Vessel Linear
53/134
interpolatethetranslationatthecontrolpoints.
Theradialbasisfunctionofthin-platesplinesisde
-
8/8/2019 Vessel Linear
54/134
-
8/8/2019 Vessel Linear
55/134
eldEventhoughstrictcriteriaisused
inselectingmatchingjunctions,therecanstillbefalsematchingdueto
variousreasons,suchasnoiseandthepartialvolumeeect.Thereareseveral
commonwaystoremovefalsematching.Oneway24isto
-
8/8/2019 Vessel Linear
56/134
ndmultiplematchesforeachcontrolpoint
inthesourcevolumeandthentryallthepossiblecombinationsof
thematchingrelationsto
-
8/8/2019 Vessel Linear
57/134
ndthetransformationthatminimizesthedierence
betweenthesourceandtargetvolumes.Thismethodisapplicabletoboth
rigidandnon-rigidregistration.Theshortcomingisthatitiscomputationallyexpensive.A
secondmethodistoestimateatransformation
-
8/8/2019 Vessel Linear
58/134
eld,i.e.arigidtransformation,andthen
checktheregistrationerrorateachjunction.Iftheerroristoo
big,thenitisafalsematch.HoweverthesurfaceinterpolatedbyTPS
passesthroughthecontrolpoints,whichmakesthismethodnotsuitable.Athirdwayistocheckthelocalfeaturesoftheestimatedtransformation
-
8/8/2019 Vessel Linear
59/134
eldateachjunction,andremovethose
withlocalfeaturesdeviatingtoomuchfromtheaverage.Intheproposed
approach,thethirdmethodisusedandthelocalfeatureischosento
bethecurvaturesofthetransformation
-
8/8/2019 Vessel Linear
60/134
eld.Thecurvaturesofthetransformation
-
8/8/2019 Vessel Linear
61/134
eldinbothhorizontalandverticaldirections
arecomputedusingLaplacianoperator,seeEquation9-10.
O2Tx(x,y,
z)=Tx(x+1,y,z)+Tx(x-1,y,z)+Tx(x,y+1;z)+(9)
Tx(x,y-1;z)-4Tx(x,y,z)
O2Ty(x,y,z)=Ty(x+1,y,z)+Ty(x-1,y,z)+Ty(x,y+1;z)+(10)
Ty(x,y-
-
8/8/2019 Vessel Linear
62/134
1;z)-4Ty(x,y,z)
whereTx(x,y,z)isthehorizontalcomponentofthedisplacementvector
at(x,y,z)andTy(x,y,z)istheverticalcomponent.Due
totheanisotropicnatureofthickCTscansonwhichtheexperimentsarecarriedout,thedisplacementvectorsintheneighboringslicesarenotused.
Thecurvaturein
-
8/8/2019 Vessel Linear
63/134
thezdirectionisnotcomputedeither.
Itisassumedthattherealtransformation
-
8/8/2019 Vessel Linear
64/134
-
8/8/2019 Vessel Linear
65/134
isremoved.Thisprocessisrepeatediteratively
untilnojunctionsareremoved.
2.5.Enforcementofvesselconstraints
Inlandmark-basedregistration,itisdesirabletohaveaslessfalsematchesas
possible,whichoftenleadstoastrictcriteriainselectingthematchingpairsoflandmarks.Ontheotherhand,itisalsoimportanttohave
enoughmatchinglandmarks
-
8/8/2019 Vessel Linear
66/134
togetanaccurateestimateofthe
transformation.Thismeansthecriteriashould
-
8/8/2019 Vessel Linear
67/134
-
8/8/2019 Vessel Linear
68/134
segmentB.doesnotshowup.The
vesselsegmentABismatchedtoA.B.,resultinginan
inaccuratetransformationvectorAA..Howeverthetranslationcomponentinthedirectionof
AA0.isaccurate.(b)Adjustmenttothetransformation
-
8/8/2019 Vessel Linear
69/134
eld.visavesselandl
isthenormaldirectionofv.pisthemiddlelocationof
vesselv.Whenj(t-t.)lj,shownasjabj,is
largerthan0.5,anadditional
pairofcontrolpointsisaddedtotheTPSinterpolationsuchthatvectortwillbemovedtot.
Theprojectionof
-
8/8/2019 Vessel Linear
70/134
-
8/8/2019 Vessel Linear
71/134
morereliablethanthatbetweenjunctions.In
theexperiments,thetop50%ofvesselsareselectedaccordingtothe
intensitycorrelation.Howeverthereisanapertureproblemwhenusingthematchingbetween
vesselstoestimatethedisplacementvectorsduetothelinearnatureofthevesselsegmentsandthepartialvolumeeect.Itissimilartothe
apertureproblemin
-
8/8/2019 Vessel Linear
72/134
opticalow.Intheproposedapproach,we
onlytracethelinearvesselsegmentswithinasingleplane.Howevera
realvesselmayshowupintwoormoresliceswitheachslice
showingapartofit.Thissituationmayleadtoinaccuracyinmatching,seeFigure1-(a).ABisavesselsegmentinthesourcevolume.
A.B.is
-
8/8/2019 Vessel Linear
73/134
thevesselsegmentshowninthetarget
volume.ThematchingsegmentB0B0.doesnotshowup,thereforevesselsegment
ABismatchedtoA.B0,resultinginaninaccuratedisplacementvectorAA.
.HoweverthetranslationcomponentinthedirectionofAA0.isaccurate,whichcanbeusedtoimprovetheregistration.
Toimprovethe
robustnessofvessel
-
8/8/2019 Vessel Linear
74/134
matching,onlythosevesselsthatsatisfythe
constraintsinwidth,lengthandintensityareselected.Intheexperiments,those
segmentswithwidthlargerthanonevoxel,lengthlongerthan20voxels,and
meanintensityhigherthan40areselected.Comparedwithjunctions,vesselsegmentsareeasiertodetect(theycanbeeasilytracedalongvesseldirections16).By
usinglinearvessel
-
8/8/2019 Vessel Linear
75/134
segments,thematchingrelationisnotbased
onasmalllocalregionasthecaseofjunctions,butbased
onthematchingofthewholevesselsthusimprovingtherobustnessofthe
matching.Toimprovethespeedandrobustnessofthesearchformatchingvessels,pyramidsofboththesourceandtargetvolumesarecreated.Thesearch
startsonthe
-
8/8/2019 Vessel Linear
76/134
topandgoesdowntothebottom
ofthepyramids.
Asdiscussedearlier,thetranslationinthe
normaldirectionofvesselscanbeusedtoimprovetheregistration.Thisis
donebyaddingadditionalcontrolpointstotheTPSinterpolationifthereisabigdierenceintheprojectionontothenormaldirectionofvessels
betweenthedisplacement
-
8/8/2019 Vessel Linear
77/134
-
8/8/2019 Vessel Linear
78/134
fromjunctions.Whenj(t.-t)
lj,seeFigure1-(b),islarger
than0.5,apair
ofcontrolpoints(p,p0)isaddedintothesetofjunctionpairs.
pisde
-
8/8/2019 Vessel Linear
79/134
nedas
p=p
+t.+((t-t0)l)l(11)
where
tisthetranslationvectorestimatedfromvesselmatching.Afteraddingadditionalcontrol
points,asimilariterativeprocessasdiscussedinsection2.4isappliedtofurtherremovethefalsematching.
-
8/8/2019 Vessel Linear
80/134
(a)(b)Figure2.Theleft
-
8/8/2019 Vessel Linear
81/134
-
8/8/2019 Vessel Linear
82/134
gureshowstheirmatchesinatarget
slice.Duetothefactthatthesourcevesselsandtheirmatches
arenotnecessarilyonthesameslice,thematchofsomevesselsin
(a)isnotshownin(b),viceversa.
3.RESULTSTheregistrationschemewastriedon6pairsoftemporalCTscans.We
usethenormalized
-
8/8/2019 Vessel Linear
83/134
sumofabsolutedistance(NSAD)betweenthe
transformedsourcevolumeandthetargetvolumetomeasuretheregistrationerror.
TheNSADisde
-
8/8/2019 Vessel Linear
84/134
nedbythefollowingequation:
1
NSAD=j(I.(x,y,z)-1)-
(It(x,y,z)-2)(12)
s
N
(x;y;z)2W
whereWisalocalwindowcenteredat(x,y,z),NisthenumberofvoxelsinW,1and2
arethemean
-
8/8/2019 Vessel Linear
85/134
intensityofI.andItinW
.I.andItarethetransformedsourcevolumeandthetarget
volumerespectively.Sincethe
ss
intensityofthesame
structuremaybeondierentlevelsinthesourceandtargetvolumes,byusingthisdistancemeasure,theinuenceofthemeanintensityiseliminated.
Toevaluatethe
-
8/8/2019 Vessel Linear
86/134
performance,theproposedalgorithmiscomparedwith
threeotherregistrationalgorithms.Thethreealgorithmsare3Dsurface-basedregistration,253D
voxel-basedregistration,263Dnon-rigidregistrationbasedonnormalizedmutualinformation.27,28
Inordertoevaluatehowwelltheproposedregistrationalgorithmrecoversthetransformation
-
8/8/2019 Vessel Linear
87/134
-
8/8/2019 Vessel Linear
88/134
eldusedintheexperimentshouldbe
closetothetransformation
-
8/8/2019 Vessel Linear
89/134
eldthathappensintherealsituation
tomaketheexperimentvalid,thesynthetictransformation
-
8/8/2019 Vessel Linear
90/134
eldisestimatedbyregisteringthesix
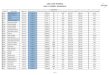
pairsofrealtemporalCTscans.Table1showsthequantitativeevaluation
oftheproposedalgorithm.Itcanbeseenfromthe
-
8/8/2019 Vessel Linear
91/134
rstpartofTable1thatNSAD
measurebetweenthesourceandtargetvolumesafterregistrationbytheproposed
algorithmiswithinrangeof[0:932:87],whichismuchsmallerthanthe
distanceobtainedusingthethreeotherregistrationmethods.ThesecondpartofTable1showsthedierencebetweentheestimatedtransformation
-
8/8/2019 Vessel Linear
92/134
eldandtheknownone.Itshows
themeanlengthdierence(measuredinvoxels),thedeviationofthelength
dierence,therelativedierencewhichisthedierenceinlengthdividedbythe
lengthofvectorsintheknowntransformation
-
8/8/2019 Vessel Linear
93/134
eld,thedeviationoftherelativedierence,
orientationdierenceinradian,andthedeviationoforientationdierencerespectively.We
canseethemeanlengthdierenceislessthanhalfvoxel,themean
relativedierenceislessthan6percents,andthemeanorientationdierenceislessthan0.16radiansor10degrees.Therefore,theresultsdemonstratethe
accuracyofthe
-
8/8/2019 Vessel Linear
94/134
proposedapproach.Figure3showsboththe
synthetictransformation
-
8/8/2019 Vessel Linear
95/134
elds(rigidandradial)andtheestimated
ones.Wecanseethattheestimatedtransformation
-
8/8/2019 Vessel Linear
96/134
eldsarealmostidenticaltotheknown
ones.Inordertoevaluatetherobustnessoftheregistrationmethodagainst
noisemore
-
8/8/2019 Vessel Linear
97/134
NormalizedSumofAbsoluteDistancecase
1case2case3case4case5case6Initial
alignment12.93593410.1846024.0380314.59260610.81813012.540091Ourmethod2.8742461.7595470.9330381.105014
2.1995411.6177453Dsurface12.2641078.2869623.6247273.9547608.64555710.4357953Dvoxel10.8507078.8791893.4118764.1106118.32550611.2126773DNMI10.9701947.5256862.9425833.6689758.144775
8.570295
-
8/8/2019 Vessel Linear
98/134
DierenceofTransformationVectorscase1case
2case3case4case5case6Lengthdierence(mean)
0.3753670.4286000.3498460.3254190.3832610.250679Lengthdierence(dev)0.5332790.4612560.4737730.344143
0.4033070.225654Ralativedierence(mean)0.0495370.0566070.0543910.0496500.0568970.045490Ralativedi
erence
(dev)0.0648170.0847360.0986900.0695910.0744860.066269Orientationdierence(mean)0.0792090.075370
0.0834420.0714920.087357
-
8/8/2019 Vessel Linear
99/134
0.060312Orientationdierence(dev)0.1085360.1177590.143446
0.1597500.1209570.105408
Table1.Resultsofevaluatingtheproposed
approachinrecoveringknowntransformation
-
8/8/2019 Vessel Linear
100/134
eld.Itcanbeseenfromthe
-
8/8/2019 Vessel Linear
101/134
rstpartthatdistancebetweenthesource
andtargetvolumesafterregistrationbyouralgorithmsiswithinrangeof
[0:932:87],whichismuchsmallerthanthedistanceobtainedusing
theotherthreeregistrationmethods.Fromthesecondpartofthistable,Wecanseethemeandierenceinlengthislessthanhalfvoxel,
themeanrelative
-
8/8/2019 Vessel Linear
102/134
errorinlengthislessthan6
percents,andthemeanorientationerrorislessthan0.16radiansor
10degrees.(a)(b)Figure3.Theresultofregistrationonimagedeformed
bysynthetictransformation
-
8/8/2019 Vessel Linear
103/134
eld.(a)knownnon-rigidtransformation
-
8/8/2019 Vessel Linear
104/134
eld.(b)estimatednon-rigid
-
8/8/2019 Vessel Linear
105/134
eld.
comprehensively,additivezero-meanGaussian
noiseatmultiplelevelsisaddedtothesyntheticdeformedvolumes.Figure
4showsthemeananddeviationofthemagnitudedierenceofthedisplacement
vectors.Itcanbeseenthattheregistrationalgorithmisquiterobustupto10dB(signaltonoiseratio).
4.CONCLUSIONIn
thispaper,a
-
8/8/2019 Vessel Linear
106/134
generalregistrationframeworkthatusesbothjunctions
andvesselsareproposed.Thelandmarks(junctionsandlinearvesselsegments)are
obtainedfromthevesselnetworkafterenhancement.Weusethevesselenhancement
-
8/8/2019 Vessel Linear
107/134
lterproposedinourpreviouswork,16which
candistinguishbetweenjunctionsandnodules,thus
-
8/8/2019 Vessel Linear
108/134
2
1.61.81.41.6
1.20 5 10 15 20
0 5 10 15 20
Mean normal of difference vector
1.41.21
Angle of difference vector
1
0.80.80.60.60.40.40.20.2Signal to noise ratio (SNR)Signal to
noise ratio (SNR)(a)
(b)Figure4.Evaluationoftheregistrationalgorithmwithrespecttonoise.(a)meanmagnitudeofdierencevectorbetweenthetransformation
-
8/8/2019 Vessel Linear
109/134
elds.(d)thestandarddeviationofthe
magnitudeofthedierencevectorsbetweenthetransformation
-
8/8/2019 Vessel Linear
110/134
elds.Itcanbeseenthatthe
registrationalgorithmisquiterobustupto10dB.
the
negativeimpactofnewnodulesaresuppressed.Inthesegmentedvesselnetwork,junctions
areselectedbycheckingtheratioofeigenvaluesofthegradientcorrelationmatrix.Thematchingbetweenjunctionsisbuiltbysearchinginthetargetvolume
withinalocal
-
8/8/2019 Vessel Linear
111/134
windowafterinitialalignmentofthesource
andtargetvolumes.Thefalsematchingofjunctionsareiterativelyremovedusing
thelocalfeatureofthetransformation
-
8/8/2019 Vessel Linear
112/134
eld.Besidesjunctions,additionalconstraintsfromvessels
areincorporatedtoimprovetheregistration.Thematchingbetweenvesselsareobtained
bydeformingthecontourofvesselstotheirmatchesundertheguidanceof
anenergyfunction.Thetransformation
-
8/8/2019 Vessel Linear
113/134
eldisinterpolatedusingthinplatesplines.
Variousexperimentsshowthetheproposedalgorithmisaccurateinestimatingthe
non-rigidtransformation
-
8/8/2019 Vessel Linear
114/134
eldbetweentemporalCTscansandalso
robustagainstnoise.Theexperimentwithsyntheticnodulesdemonstratestherobustnessof
theproposedmethodagainstnewnodules.Futureworkwouldbetoevaluatethe
registrationonhigh-resolutionCTscansandcheckitsapplicationinthediagnosisoflungdiseasesuchasdetectionofnewnodulesandotherbloodvessel
relateddiseases.
-
8/8/2019 Vessel Linear
115/134
REFERENCES
1.C.L.
Novak,H.Shen,B.L.Odry,J.P.Ko,andD.P.
Naidich,\Systemforautomaticdetectionoflungnodulesexhibitinggrowth,inProc.of
SPIEMedicalImaging:ImageProcessing,J.M.FitzpatrickandM.Sonka,eds.,5370,pp.10{21,May2004.2.S.-C.B.Lo,J.J.Lin,L.-Y.
Hsu,Y.M.
-
8/8/2019 Vessel Linear
116/134
F.Lure,M.T.F.M.D.,R.
Li,andH.Zhao,\Enhancementoflungnoduledetectionintemporalthoracic
CT,inProc.ofSPIEMedicalImaging:ImageProcessing,J.M.Fitzpatrickand
M.Sonka,eds.,5370,pp.1139{1144,2004.3.N.Takagi,Y.Kawata,N.Niki,K.Mori,H.Ohmatsu,R.Kakinuma,K.Eguchi,M.Kusumoto,M.
Kaneko,andN.
-
8/8/2019 Vessel Linear
117/134
-
8/8/2019 Vessel Linear
118/134
registration,inProc.ofSPIEMedicalImaging:
Physiology,Function,andStructurefromMedicalImages,A.A.AminiandA.
Manduca,eds.,5746,pp.453{464,April2005.5.M.UrschlerandH.Bischof,
\Assessingbreathingmotionbyshapematchingoflunganddiaphragmsurfaces,inProc.ofSPIEMedicalImaging:Physiology,Function,andStructurefromMedicalImages,
A.A.Amini
-
8/8/2019 Vessel Linear
119/134
andA.Manduca,eds.,5746,pp.440{452,
2005.
-
8/8/2019 Vessel Linear
120/134
6.J.R.McClelland,A.G.
Chandler,J.M.Blackall,S.Ahmad,D.B.Landau,andD.J.
Hawkes,\4Dmotionmodelsovertherespiratorycycleforuseinlungcancer
radiotherapyplanning,inProc.ofSPIEMedicalImaging:Visualization,Image-GuidedProcedures,andDisplay,R.L.G.Jr.andK.R.Cleary,eds.,5744,pp.173{183,
April2005.7.
-
8/8/2019 Vessel Linear
121/134
-
8/8/2019 Vessel Linear
122/134
E.A.Homan,\Evaluationandapplicationof
3DlungwarpingandregistrationmodelusingHRCTimages,inProc.of
SPIEMedicalImaging:PhysiologyandFunctionfromMultidimensionalImages,C.-T.ChenandA.
V.Clough,eds.,4321,pp.234{243,May2001.9.H.Yoshida,\Localcontralateralsubtractionbasedonbilateralsymmetryoflungforreductionoffalseposi
tivesincomputerized
-
8/8/2019 Vessel Linear
123/134
-
8/8/2019 Vessel Linear
124/134
CTimageregistrationwithastandardlung
atlas,inProc.ofSPIEMedicalImaging:PhysiologyandFunctionfromMultidimensional
Images,C.-T.ChenandA.V.Clough,eds.,3978,pp.67{77,April2000.
12.L.FanandC.W.Chen,\3Dwarpingandregistrationfromlungimages,inProc.ofSPIEMedicalImaging:PhysiologyandFunctionfromMultidimensional
Images,C.-T.Chen
-
8/8/2019 Vessel Linear
125/134
-
8/8/2019 Vessel Linear
126/134
polynomialregistration,inXIVBrazilianSymposiumon
ComputerGraphicsandImageProcessing,pp.258{265,2001.15.H.Shikata,Geometrical
AnalysisofTreeStructureinThree-DimensionalImages.PhDthesis,DivisionofSoftwareScience,
DepartmentofInformaticsandMathematicalScience,GraduateSchoolofEngineeringScience,OsakaUniversity,2002.16.C.Wu,G.Agam,andS.ArmatoIII,\Vessel-treereconstruction
inthoracicCT
-
8/8/2019 Vessel Linear
127/134
-
8/8/2019 Vessel Linear
128/134
evaluationstudy,IEEETransactionsonMedicalImaging
22,pp.661{673,May2003.19.J.Duchon,\Interpolationdesfonctionsde
deuxvariablessuivantlesprincipesdelaexiondesplaquesminces,RAIROAnalyse
Numerique10,pp.5{12,1976.20.J.Meinguet,\Multivariateinterpolationatarbitrarypointsmadesimple,ZeitschriftfurangewandteMathematikundPhysik30,pp.292{304,1979.
21.H.Wang,
-
8/8/2019 Vessel Linear
129/134
B.Zheng,W.Good,andT.-G.Zhuang,
\Thin-platesplinebasedautomaticalignmentofdynamicMRbreastimages,inProc.
ofthe22ndAnnualInternationalConferenceoftheIEEEEngineeringinMedicineand
BiologySociety,4,pp.2850{2853,23-28July2000.22.F.L.Bookstein,\Thin-platesplinesandtheatlasproblemforbiomedicalimages,inProc.of12th
InternationalConferenceInformationProcessing
-
8/8/2019 Vessel Linear
130/134
inMedicalImaging,pp.326{342,1991.23.
K.Rohr,H.Stiehl,R.Sprengel,T.Buzug,J.Weese,andM.
Kuhn,\Landmark-basedelasticregistrationusingapproximatingthin-platesplines,IEEETransactionsonMedicalImaging
20,pp.526{534,June2001.24.F.ZanaandJ.Klein,\Amultimodalregistrationalgorithmofeyefundusimagesusingvesselsdetectionandhoughtransform,
IEEETransactionson
-
8/8/2019 Vessel Linear
131/134
MedicalImaging18,pp.419{428,May1999.
25.E.Guest,M.Fidrich,S.Kelly,andE.Berry,\Robustsurface
matchingforregistration,inSecondInternationalConferenceon3-DDigitalImagingandModeling,
pp.169{177,Oct.1999.
-
8/8/2019 Vessel Linear
132/134
26.S.C,H.DL,and
H.DJ,\Automated3-DregistrationofMRandCTimagesofthe,
MedicalImageAnalysis1(2),pp.163{175,1996.27.C.Studholme,D.Hawkes,and
D.Hill,\Anormalizedentropymeasureformultimodalityimagealignment,inProc.ofSPIEMedicalImaging,3338,pp.132{143,(SanDiego,CA),Feb.23-261998.
28.J.Camp
-
8/8/2019 Vessel Linear
133/134
andR.Robb,\Anovelbinningmethod
forimprovedaccuracyandspeedofvolumeimagecoregistrationusingnormalized
mutualinformation,inProc.ofSPIEMedicalImaging:ImageProcessing,K.M.Hanson,
ed.,3661,pp.24{31,1999.
-
8/8/2019 Vessel Linear
134/134