Embed Size (px)
Citation preview

VERIFICATION OF ROBUST PROPERTIES OF DIGITAL CONTROL
CLOSED-LOOP SYSTEMS
Vladimír Bobál, Ľuboš Spaček and Peter Hornák Tomas Bata University in Zlín Faculty of Applied Informatics
Nad Stráněmi 4511 760 05 Zlín
Czech Republic E-mail: [email protected]
KEYWORDS
Digital Control, Polynomial Methods, Robustness, Robustness Margins, LQ Method, Simulation of Control Loop Systems. ABSTRACT
Robustness is specific property of closed-loop systems when the designed controller guarantees control not only for one nominal controlled system but also for all predefined class of systems (perturbed models). The robust theory is mainly exploited for design of the continuous-time systems. This paper deals with an experimental simulation investigation of robust properties of digital control closed-loop systems. Minimization of the Linear Quadratic (LQ) criterion was used for the design of control algorithm. Polynomial approach is based on the structure of the controller with two degrees of freedom (2DOF). Four types of process models (stable, non-minimum phase, unstable and integrating) were used for controller design. The Nyquist plot based characteristics of the open-loop transfer function (gain margin, phase margin and modulus margin) served as robustness indicators. The influence of change of process gain was chosen as a parametric uncertainty. The experimental results demonstrated that a robustness of examined digital control closed-loop systems could be improved by addition of user-defined poles (UDP). INTRODUCTION
One of possible approaches to digital control systems is the polynomial theory. Polynomial methods are design techniques for complex systems (including multivariable), signals and processes encountered in control, communications and computing that are based on manipulations and equations with polynomials, polynomial matrices and similar objects. Systems are described by input-output relations in fractional form and processed using algebraic methodology and tools (Šebek and Hromčík 2007). The design procedure is thus reduced to algebraic polynomial equations. Controller design consists of solving polynomial (Diophantine) equations. The Diophantine equations
can be solved using the uncertain coefficient method – which is based on comparing coefficients of the same power. This is transformed into a system of linear algebraic equations (Kučera 1997). It is obvious that the majority processes met in industrial practice are influenced by uncertainties. The uncertainties suppression can be solved by implementation of either adaptive control or robust control. The robust control and the adaptive control are viewed as two control techniques, which are used for controller design in the presence of process model uncertainty - process model variations (Landau 1999; Landau et al. 2011). The design of a robust controller deals in general with designing the controller in the presence of process uncertainties. This can be simultaneously: parameter variations (affecting low- and medium-frequency ranges) and unstructured model uncertainties (often located in high-frequency range). The aim of this paper is the experimental examination of the robustness of digital controllers based on LQ method. Robustness is the property when the dynamic response of control closed loop (including stability of course) is satisfactory not only for the nominal process transfer function used for the design but also for the entire (perturbed) class of transfer functions that expresses uncertainty of the designer in dynamic environment in which a real controller is expected to operate. The design of a robust digital pole assignment controller is investigated in (Landau and Zito 2006), the robust stability of discrete-time systems with parametric uncertainty is analysed in (Matušů 2014). A more comprehensive discussion of robustness is taken when the design based on frequency methods is considered. One can readily compare the system gain at the desired operating point and the point(s) of onset of instability to determine how much gain change is acceptable. Only this method will be used for investigation of the robustness of digital control stable, unstable, non-minimum phase and integrating processes. The paper is organized in the following way. The fundamental principle of the robustness of digital
Proceedings 31st European Conference on Modelling and Simulation ©ECMS Zita Zoltay Paprika, Péter Horák, Kata Váradi, Péter Tamás Zwierczyk, Ágnes Vidovics-Dancs, János Péter Rádics (Editors) ISBN: 978-0-9932440-4-9/ ISBN: 978-0-9932440-5-6 (CD)

control-loop in Section 2.presented in robust propetheir results concludes thi
ROBUSTNECONCEPTS
Digital Cont
The “degreesthe developsystem desigsystem is deffunctions thdesign of conso a Two-Dnaturally haFreedom (abfact was alrestructure ofmodification
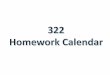
Figure 1: Blo
The specififunctions and
is the process
are the feedbindividual cothe controlleare disturban
Robustness
The matheminaccurate in
systems with . Design of 2Section 3. T
erties of digiare presente
is paper.
ESS PROBLES
trol Loops
s of freedom”ment of congn. The degrfined as the nu
hat can be antrol systems egree-of-Freeas advantagebbreviated as eady stated bf the digita
n is depicted sc
ock diagram osy
ication of id signals in Fi
1( )pYG zU
− =
s model and
( )1rG z
P− =
( )1qG z
P− =
back part Gq aontrollers ; y, er output and nces and
( )1K z−
matical modenterpretation o
basic concepDOF digital L
The simulationital closed-looed in Section
EM AND BA
concept is frentrol strategiree of freedoumber of closadjusted indeis a multi-obj
edom (2DOF)es over a 1DOF) contr
by (Horowitz al control-lochematically i
of a closed looystem
individual diig. 1:
1
1
( ) ( )( ) ( )
Y z B zU z A z
−
−=
( )( ) ( )
1
1 1
R z
P z K z
−
− −
( )( ) ( )
1
1 1
Q z
P z K z
−
− −
and the feedforu, w are the
the reference
) 11 z−= −
el of the pof the real sy
ts are illustratLQ controllern verification op control wn 4. Section
ASIC
equently usedes and contrm of a contr
sed-loop transependently. Tjective proble) control systeOne-Degree-o
rol system. Th1963). Typic
oop of 2DOin Fig. 1.
op 2DOF contr
iscrete trans
(
(2
(3
rward part Grprocess outpsignal; d and
(4
process is juystem, therefo
ted r is
of with n 5
d in trol trol sfer The em, em of-his cal OF
rol
sfer
1)
2)
3)
r of put, d v
4)
ust ore
thsynuerunmununthdea coofRanSzM
R
Th
ThsufrfrG
RdifuelmmThloSygrunansh
M(Ldetomdethclm
he discrepancystem do notumber of factrrors. A generncertainty w
mathematicallyncertainty arncertainty) anhe frequency design will be t
property ofontrol of the nf the family (sobust controlnd Zafirou 19znainer 1998
Matušů and Pro
Robustness Ma
he open-loop
(OLG
he frequencyubstitution zequency. Theequency resp( )j
OLG e ω− . obustness of istance betweunction and cements, whic
margin, phase margin.
he gain margoop gain reqystems with reater changesnstable in cln inverse valuhift tha
Minimal recomLandau and Zefined as the co make a clo
margin also melay. If there he open-loop,osed-loop (M
margin is the ad
ies between enable the optors may be ic term for thi
which can y in different we: structured
nd unstructuredomain). The termed the nom
the controllenominal modelimilar class) mmethods are
89; Doyle et a; Skogestad
okop 2011).
argins
transfer functi
) (( )
11
B zz
A z−
−=
y characteristje ω= where
e Nyquist plotonse of the o
closed loopsen Nyquist p
critical point ch help to ev
margin, del
in mG is defiquired to ma
greater gains in system palosed loop. Iue of the gainat occurs at the
(m
OL
GG
=
mmended valueZito 2006). Tchange in openosed-loop syseasures the syis a time-delathe system
Messner and Tdditional phas
the model ptimal controlresponsible fis modelling e
itself be ways. Two mad uncertaintyed uncertainty
model used fminal model. er that was
el and is suitabmodels. e analyzed e.al.1990; Sáncand Postleth
tion of 2DOF
) ( )) ( ) (
1 1
1 1
z Q z
K z P z
− −
− −
tic can be e ω is thet is a parame
open-loop tran
s is closely rplot of open
(-1, j0). Thevaluate this dlay margin a
ined as the chake the systn margins carameters befIt can be c
n correspondine critical frequ
( )1
pcje ω−
ue of the gain The phase m
en-loop phase stem unstableystem’s toleray greater thawill become
Tilbury 2011se that it must
and the realller design. Afor modellingerror is model
representedajor classes ofy (parametricy (specified infor controllerRobustness isdesigned for
ble for control
g. in (Morariches-Peňa andhwaite 2005;
is
)1(5)
obtained bye normalizedetric plot of ansfer function
related to theloop transfer
ere are somedistance: gainand modulus
ange in open-em unstable.an withstand
fore becomingconsidered asng to a phaseuency pcω
(6)
margin is 0.5margin mP is
shift requirede. The phaseance to time-an 180 / pcω ine unstable in). The phase
t be add at the
l A g l d f c n r s r l
i d ;
y d a n
e r e n s
-.
d g s e
5 s d e -n n e e

crossover fropen-loop sy
where ( cϕ ωTypical val
o30 6mP≤ ≤
The delay mthat the syste
The modulusGauss planetransfer func
Notice that throbustness inpossible to cso-called infibe shown thgood phase mvalues of m
2mG ≥ and The gain, phplot are depic
Figure DESIGN OFCONTROLL
The design general blockof freedom (2The second-o
(PG
requency crω , ystem equals 1
180mP =
)cr is phase slues for a
o0 (Landau anmargin mτ is em can tolerat
mτ =
s margin mMe between Ntion and critic
1mM G= +
he modulus mndicator than consider this ifinity norm Hhat good gainmargin, and v
modulus margio29mP ⟩ (Lan
hase and modcted in Fig. 2.
2: Gain, phas
F POLYNOMLER
of the contrk scheme of c2DOF) as seenorder discrete
) ( )( )
11
1
B zz
A z
−−
−=
for which t1. It is defined
( )0crϕ ω−
shift at crossogood phas
nd Zito 2006)amount of ade before it bec
m
cr
Pω
=
m is minimumNyquist plotcal point (-1, j
( )1OL min
G z−
margin is a mugain and pha
indicator as mH∞ (Kwakernan margin doevice versa. Onin bigger thanndau 1998). dulus margins.
se and modulu
MIAL 2DOF
rol algorithm closed-loop wn in Fig. 1. process mode
))
11 2
111
b z ba z
−
−
+=
+ +
he gain of td (in degrees)
(7
over frequencse margin a. dded time delcomes unstabl
(8
m distance in t of open-lo
j0)
(9
ch more reliabase margin. It
modern approaak 1993). It cs not guarantn the other sidn 0.5 guarant
s in the Nyqu
us margins
LQ
is based onwith two degre
el is considere
22
22
za z
−
− (10
the as
7)
cy. are
lay le.
8)
the oop
9)
ble t is ach can tee de, tee
uist
n a ees
ed
0)
Thex
(1
G
Thpopo
it paPoAprwD
FoDdopoby
Th
Pous M
Ththva
wrecrbein
w
hen the indivxpressed in the
( ) (1
rG zP
− =
11)
( ) (1
q
QG z
P z− =
he controllerolynomial (Dolynomial equ
1( ) (A z K z−
is possible arameters – olynomial (D
Asymptotic trarovided by th
which is given iophantine eq
1( )S z D−
or a step-chanDw (z-1) = 1 - z-
oes not enterossible to deriy substituting
he 2DOF cont
( ) (u k
K z−=
olynomial LQsing minimiza
Minimization
he linear quahe quadratic calue of the con
k
J∞
=
= ∑
where qu is selates the coriterion. In thie realized thrnput-output de
( ) (uA z q A z
where δ is a con
vidual parts oe form of disc
( )( ) ( )
1
1 1
R z
z K z
−
− −=
( )) ( )
1
1 1
Q z
z K z
−
− −=
synthesis cDiophantine) uation
1 1) ( ) (P z B− − +
to calculatcoefficients ( )1z− is the chacking of thhe feedforwaby solution o
quation
( )1 (wD z B z− −+
nging referenc1 and S is an a
into the conive the polynoz = 1
0R r= =
troller output
) ( ) ( )01 1
rw k
P z− −
Q controllers ation of LQ cri
of LQ Criter
dratic controlcriterion whicntroller output
[{0
( ) (w k y k−∑
so-called penontroller outps paper, criterrough the spescription of th
) ( ) (1z B z B− +
nstant chosen
of digital contcrete transfer f
( )(0
111
rp z−
=+
( )(1
0 11
11 1q q z q
p z
−
−
+ +
+ −
consists of sequations.
1 1( ) ( )z Q z− − =
te 4 feedbacof the polyn
haracteristic pohe reference ard part of tof the followin
1 1) ( ) (R z D− − =
ce signal valuauxiliary polyntroller desigomial R from
(1)(1)
DB
is given by
)( )
( ) (1
1
Q z
K z P z
−
−−
are derived riterion (Kučer
rion
l methods trych uses penalit
] [ ]2) ( )uk q u k+
nalization conput to the vrion minimizaectral factorizhe system
( ) ( )1z D z δ− =
so that d0 = 1
troller can befunctions
)11 z−−
)2
21
q zz
−
−− (12)
olving linearFrom first
1( )D z − (13)
ck controllernomials Q, P.olynomial.
signal w isthe controllerng polynomial
1( )z− (14)
e, polynomialynomial whichn. Then it isequation (14)
(15)
) ( )1y k
z− (16)
in this paperra 1991).
y to minimizeization of the
] }2 (17)
nstant, whichvalue of theation (17) willzation for an
( )1D zδ − (18)
.
e
r t
r .
s r l
l h s )
r
e e
h e l n

Because the experimental process model (10) is second-order with second-degree polynomials( ) ( )1 1,A z B z− − , the second-degree polynomial is also
obtained from the spectral factorization:
( )1 1 21 21D z d z d z− − −= + + (19)
Spectral factorization of polynomials of the first- and the second- degree can be computed by analytical way; the procedure for higher degrees must be performed iteratively (Bobál et al. 2005). The MATLAB Polynomial Toolbox (Šebek 2014) can be used for a computation of spectral factorization of the higher degree polynomials using file spf.m by command
d = spf(a*qu*a' + b*b') (20)
It is known that by using the spectral factorization (18), it is possible to compute only two suitable poles (α, β). It is obvious from equation (13) that in this case a choice of the fourth-degree polynomial D(z) is suitable
( )1 1 2 3 44 1 2 3 41D z d z d z d z d z− − − − −= + + + + (21)
Therefore, the other poles (γ1, γ2) are needed to be user-defined. The application of user-defined poles is significant mainly in nonstandard process models (e.g. non-minimum phase, unstable, integrating or with time-delay). The usage of user-defined poles makes it possible to improve the robustness of these processes. Then the digital 2DOF controller (16) can be expressed in the form
( ) ( ) ( ) ( ) ( )
( ) ( ) ( )0 0 1 2
1 1
1 2
1 1 2
u k r w k q y k q y k q y k
p u k p u k
= − − − − −
+ − − + − (22)
where
1 2 3 40
1 2
1 d d d dr
b b+ + + +
=+
(23)
and parameters 0 1 2 1, , ,q q q p are computed from (13).
SIMULATION VERIFICATION AND RESULTS
A simulation verification of designed algorithms was performed in MATLAB/SIMULINK environment. The robustness of individual control loops was experimentally investigated by changing characteristic polynomial degree by adding user-defined poles. In addition, the influence of a change of the gain of the nominal process model was examined. From the point of view of robust theory, it is possible to consider these experiments as determination of individual robust stability margins that are caused by parametric uncertainty influence. This paper presents robustness properties of the digital second-order control systems that can be described by the following continuous-time transfer function: 1) Stable system:
( )1 2
110 7 1
G ss s
=+ +
(24)
2) Non-minimum phase stable system:
( )2 2
1 210 7 1
sG ss s−
=+ +
(25)
3) Unstable system:
( )3 2
18 2 1
G ss s
=− −
(26)
4) Integrating system:
( ) ( )41
2 1G s
s s=
+ (27)
Let us now discretize (24) - (27) using a sampling period 0 2 sT = . Discrete forms of these transfer functions are (see (10))
( )1 2
11 1 2
0 1281 0 08031 0382 0 24661N
z. z .G.
zz z.
− −−
− −
+=
+− (28)
( )1 2
12 1 2
0 0736 0 28201 0382 0 24661N
z. z .G z.z. z
− −−
− −
+=
+−−
(29)
( )1 2
13 1 2
01 1
0 3104 36563 3248 6487N
z. z .G.
zz . z
− −−
− −
+=
+− (30)
( )1 2
14 1 2
01 0
0 7385 52851 3679 3679N
z. z .G.
zz . z
− −−
− −
+=
+− (31)
Transfer functions (28) – (31) represent nominal models. From the second-order model (10) and two parts (11), (12) of digital 2DOF controller, the open-loop transfer function can be expressed using individual process and controller parameters
( )3 2
1 2 3 44 3 2
1 2 3 4OL
e z e z e z eG z
z f z f z f z f+ + +
=+ + + +
(32)
where
( )( )
1 1 0 2 1 1 2 2 3 1 2 2 1
4 1 0 1 1 1 2 1 2 1 2
3 1 1 1 2 4 2 1
; ; ;; 1; ;
1 ;
e b q e b q b q e b q b qe b q f p a f p a a a
f p a a a f a p
= = + = +
= = + − = − −
= − − + = −
(33)
Experimental process models (28) – (31) were used for simulation experiments. Individual simulation experiments are realized subsequently: • The individual nominal models (28) – (31) NiG for
( )1, 2,3, 4i = were multiplied by the parameter
PiK , then the perturbed models are given as
Pi Pi NiG K G= (34)
The parameter PiK was increased (decreased) as far as control closed-loops were in the stability

boundary• These exp
the polefactorizat= γ2 = 0. for all exp
• Obtainedcontrol-loby spectr
• The samethe secon
• Individuaare shown
• Frequencmodels G
• Values oMm were
Figure 3: Co
Figure 4: N
Figure 5: C
y - the critical periments we
es α, β wetion and user- The penalizaperiments.
d critical gainsoops when thal factorizatioe experimenta
nd case, only γal control behan in Figs. 3, 5
cy plots of oGNi were depict
f individual rcomputed (se
ontrol of stablKc1
Nyquist plots o
Control of nonand using U
gain ciK waere realized foere compute-defined polesation factor qu
s were used fhe poles α, β on and γ1 = 0.2al conditions γ2 = 0.4. aviours of mo, 7a, 7b and 1
open-loops wited, see (Figs.robustness maee Tabs. 1 – 4)
le model (28) = 3.55
of open loop w
n-minimum phUDP, Kc2 = 1.7
s determined.
or the case whed by spects (UDF) wereu = 10 was us
for simulation were comput
2, γ2 = 0. were used as
odels (28) – (31. ith the nomin. 4, 6, 8 and 12argins - Gm, P).
and using UD
with model (28
hase model (2972
hen tral e γ1 sed
n in ted
in
31)
nal 2). Pm,
DP
8)
9)
F
IncrThcoFiadonad
F
F
FiNpo
Figure 6: Nyq
n the case of throsses the reherefore, twoontrol closed-igs. 7a, 7b).ddition of UDn the contrarddition 1 2,γ γ .
Figure 7a: Co
Figure 7b: Co
igs. 9 (Kc3a =Nyquist plots c
oints.
quist plots of o
he unstable meal axis in to critical gainloops are in tIt is obviou
DP does not stary the contro
ontrol of unstaUDP, Kc3a
ontrol of unstaUDP, Kc3b
0.78) and 10
cross the real
open loop with
model (30), thetwo points (ns exist and the stability bus from Fig.tabilize the cool process is
able model (303a = 0.78
able model (33b = 1.29
0 (Kc3b = 1.29l axis relative
h model (29)
e Nyquist plot(see Fig. 8).two cases of
boundary (see 7a that the
ontrol process,unstable by
0) and using
0) and using
) show whereely to critical
t . f e e , y
e l

Figure 8: N
Figure 9: Cr
located on
Figure 10: Clocated on
Figure 11: C
-1.5-0.5
0
0.5
1
1.5
2
2.5
10
6 dB
4 dB
2 dB
Imag
inar
y Axi
s
-3-0.5
0
0.5
1
1.5
2
2.52 dB
Imag
inar
y A
xis
Nyquist plots o
ross point of Nn the right side
Cross point of n the left side
Control of inteUDP, K
-1 -0.5
0 dB
20 dB0 dB
B
B
Nyq
-2 -1
20 d10 dB
6 dB
4 dB
Nyq
R
of open loop w
Nyquist plot we from critical
Nyquist plot wfrom critical
egrating modeKc2 = 2.37
0 0.5
-20 dB-10 dB
-6 dB
-4
quist Diagram
Real Axis
0
0 dB
-20 dB-10 dB
-6 dB
-4
dBB
quist Diagram
Real Axis
with model (30
with real axis il point (-1, j0)
with real axis point (-1, j0)
el (31) and usi
1 1.5
dB
-2 dB
1 2
B
4 dB
-2 dB
0)
is )
is
ing
F
Tyar1.
2.3.It reReanlo
5
igure 12: Nyq
Table 1:
U1γ =
1 0.γ =
1 0.2γ =
Table 2
U1γ γ=
1 0.γ =
1 0.2γ =
Table 3:
U1γ =
1 0γ =
1 0.2γ =
Table 4:
U1γ =
1 0.γ =
1 0.2γ =
ypical values re recommend Gain margin
Phase marg Modulus ma
is obviousecommendatioecommendationd integratingocated on the l
quist plots of
Robustness M
UDP 2 0γ = 3
2.2; 0γ = 4
22; 0.4γ = 5
: Robustness M
UDP G2 0γ = 1
22; 0γ = 1
22; 0.4γ = 2
Robustness M
UDP 2 0γ= =
2.2; 0γ =
22; 0.4γ =
* Interval
** Interval*** Interval
Robustness M
UDP
2 0γ = 2
2.2; 0γ = 2
22; 0.4γ = 3
for stability mded in (Landaun: 2mG ≥ ,
in: o30 mP≤ ≤argin: 0mM ≥s from Tab
ons are fulfilleon 1 is fulfillg system (31)left side of th
open loop wit
Margins, Mod
Gm Pm 3.55 63.40 4.18 65.96 5.84 69.84
Margins, Mod
Gm Pm 1.72 -34.56 1.90 -50.87 2.37 62.18
Margins, Mod
Gm Pm * 11.42
** 11.37 *** 10.82
(0.73 – 1.29) l (0.74 – 1.32)l (0.78 – 1.37)
Margins, Mod
Gm Pm 2.37 38.26 2.61 39.31 3.15 40.88
margins in a u and Zito 200
[min: o60≤
0.5 , [min: bs. 1 – 4ed subsequentlled for stable) – their Nyqhe complex pla
th model (31)
del (28)
Mm0.64 0.68 0.74
del (29)
Mm0.41 0.47 0.58
del (30)
Mm0.19 0.20 0.19
)
del (31)
Mm0.50 0.52 0.57
robust design06): 1.6]
0.4] that thesely: e system (28)quist plots areane (see Figs.
n
e
) e .

4 and 12) and they cross the real axis relatively near the point (0, 0). Recommendation 2 is almost fulfilled for system (28) and fully for system (31). Recommendation 3 can be fulfilled for all systems except of unstable system (30). Remarks: The negative –Pm in the system (29) is caused by an unstable zero (see the first and second Nyquist plot – Fig. 6). The unstable system (30) does not fulfil any recommended value. The open-loop of this system has two cross points of Nyquist plot with real axis (-0.73, j0) and (-1.29, j0) – see Figs. 8 -10. The perturbed system is at the stability boundary for
3 3p c aK K= and 3 3p c bK K= and is stable between these
points ( )3 3 3c a p c bK K K< < - see Tab.3. CONCLUSION
It is well known that the robust theory is applied mainly for design of continuous-time controllers for control of stable systems. The paper presents an experimental simulation investigation of robustness of algorithms for digital LQ control. Individual control algorithms were verified using 2DOF modification in the MATLAB/Simulink environment. Four types of process models (stable, non-minimum phase, unstable and integrating) were used for controller design. The influence of change of process gain (parametric uncertainty) was used for determination of the stability boundary. The gain, phase and modulus margins of the Nyquist plot of open-loop sampled-data system were used as robustness indicators. Values of these indicators showed that only stable and integrating processes are in recommended intervals. Simulation experiments demonstrated that robustness margins of examined digital control closed-loop systems can be improved by addition of user-defined poles. REFERENCES Bobál, V., Böhm, J., Fessl, J. and J. Macháček. 2005. Digital
Self-tuning Controllers: Algorithms, Implementation and Applications. Springer-Verlag, London.
Doyle, J., Francis, B. and A. Tannenbaum. 1990. Feedback Control Theory. 1990. Macmillan Publishing.
Horowitz, I., M. 1963. Synthesis of Fedback Systems. Academia Press.
Kučera, V. 1991. Analysis and Design of Discrete Linear Control Systems. Prentice-Hall, Englewood Cliffs, NJ.
Kučera, V. 1993. “Diophantine equations in control – a survey”. Automatica 29, 1361-1375.
Kučera, V. 1991. Analysis and Design of Discrete Linear Control Systems. Prentice-Hall, Englewood Cliffs, NJ.
Kwakernaak, H. 1993. „Robust control and H∞ optimization – Tutorial paper”. Automatica 29, 255-273.
Landau, I. D. 1998. “The R-S-T digital controller design and applications”. Control Engineering Practice 7,155-165.
Landau, I. D. 1999. “From robust control to adaptive control,” Control Engineering Practice 7, 1113-1124.
Landau, I. D. and G. Zito. 2006. Digital Control Systems. Springer-Verlag, London.
Landau, I. D., Lozano, R., M’Saad, M. and A. Karimi. 2011. Adaptive Control, Algorithms. Analysis and Applications. Springer-Verlag, London.
Matušů, R. 2014. “Robust stability analysis of discrete-time systems with parametric uncertainty,” International Journal of Mathematical Models and Methods 8, 95-102.
Matušů, R. and R. Prokop. 2011. “Graphical analysis of robust stability for systems with parametric uncertainty: an overview,” Transactions of the Institute of Measurement and Control 33, 274-290.
Messner, B. and D. Tilbury. 2011. Control Tutorials for MATLAB and Simulink. MathWorks, Natick, MA, USA.
Morari, M. and E. Zafiriou. 1989. Robust Process Control. Prentice-Hall, Englewood Cliffs, NJ.
Sánches-Peňa, R. S. and M. Szainer. 1998. Robust Systems. Theory and Application. J. Willey & Sons, New York.
Šebek, M. Polynomial Toolbox for MATLAB, Version 3.0. 2014. PolyX, Prague, Czech Republic.
Šebek, M. and M. Hromčík. 2007. “Polynomial design methods,” International Journal of Robust and Nonlinear Control 17, 679-681.
Skogestad, S. and I. Postletwaithe. 2005. Multivariable Feedback Control – Analyses and Design. J. Wiley & Sons, Chichester.
AUTHOR BIOGRAPHIES VLADIMÍR BOBÁL graduated in 1966 from the Brno University of Technology, Czech Republic. He received his Ph.D. degree in Technical Cybernetics at Institute of Technical Cybernetics, Slovak Academy of Sciences, Bratislava, Slovak Republic. He is now Professor at the Department of Process Control, Faculty of Applied Informatics of the Tomas Bata University in Zlín. His research interests are adaptive and predictive control, system identification and CAD for automatic control systems. You can contact him on e-mail address [email protected]. ĽUBOŠ SPAČEK studied at the Tomas Bata University in Zlín, Czech Republic, where he obtained his master’s degree in Automatic Control and Informatics in 2016. He currently attends PhD study at the Department of Process Control. His e-mail address is [email protected]. PETER HORNÁK studied at the Tomas Bata University in Zlín, Czech Republic, where he obtained his master’s degree in Automatic Control and Informatics in 2016. He is currently working in private company focused on industrial robotics. His e-mail address is [email protected].
















![[MPR] M 50 / Th 40 / C+ / Surface:Surface Smooth](https://img.pdfslide.us/doc/110x75/61f11fa626f1990b987ba0a5/mpr-m-50-th-40-c-surfacesurface-smooth.jpg)