Embed Size (px)
Citation preview

Vehicular Networks – Quo Veheris?Thoughts on the past, present and future of
vehicle-to-X communication
Hannes Hartenstein(with M. Killat, F. Schmidt-Eisenlohr, M. Torrent-Moreno)University of Karlsruhe, Karlsruhe Institute of Technology
Karlsruhe, [email protected]

Hannes Hartenstein 2Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
Goals of vehicle-to-X communication
Active safety
Traffic efficiency
Environmental friendliness

Hannes Hartenstein 3Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
Active safety: examples
Emergency electronic brake lights
Intersection collision warning

Hannes Hartenstein 4Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
Traffic efficiency: examples
Enhanced route guidance and navigation
Green light optimal speed advisory
Discovery of free parking places

Hannes Hartenstein 5Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
Environmental friendliness (cost aspects): “examples”
Bloomberg:
NYMEX CRUDE FUTURE
July 18, 2008
$128.88
2006

Hannes Hartenstein 6Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
Outline of this talk
Assessing the current state-of-the-art in vehicle-to-X communication
Traffic telematics today: public transport, road operatorsStatus quo of vehicle-to-X system design
Two „grand challenges“ of vehicle-to-X communicationScalability: radio channel congestion controlImpact assessment of vehicle-to-X communication
A look ahead Field operational testsCooperative systems

Hannes Hartenstein 7Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
Traffic telematics today: public transportation
© INIT AG, Karlsruhe
Buses, light railwaystalk to control center,
stations, traffic signals,each other, passengers
Data exchanged for operation and management,
passenger information
July 09, 2008 Dublin Bus decided for an
advanced ITS system from INIT
State-of-the-art – Scalability – Impact – Look ahead

Hannes Hartenstein 8Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
Traffic telematics today: a road operators view
© Dipl.-Ing. Manfred Harrer
State-of-the-art – Scalability – Impact – Look ahead

Hannes Hartenstein 9Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
Traffic telematics today: the concept of V2X
Vehicle-to-X communicationResearch since the 1980sLast 10 years: gained momentum with availability of low-cost GPS receivers and wireless local area network transceivers
“Disruptive idea”: equip every vehicle with a radio communication system for direct vehicle-to-vehicle and vehicle-to-roadside communication
Various issues have been addressedSpectrum allocationCommunication protocolsApplicationsDeployment scenario, standardization
We briefly review someachievements
State-of-the-art – Scalability – Impact – Look ahead

Hannes Hartenstein 10Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
Non-exhaustive overview on past and recent activities
State-of-the-art – Scalability – Impact – Look ahead

Hannes Hartenstein 11Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
Spectrum allocation in the US and in Japan
Japan: 5.770-5.850 GHz dedicated for ITSDecember 2007: 715-725 MHz for inter-vehicle communication system
Trend towards 700 MHz channel?Side note: Bosch was proposing a “radio warning system” in the 868 MHz band in the year 2000
FrequencyGHz5.850 5.870 5.880 5.890 5.900 5.910 5.920
Control and safetySafety-of-live High power public safety
5.860
United States: allocation of 75 MHz in 1999 (same for Canada and Mexico)
State-of-the-art – Scalability – Impact – Look ahead

Hannes Hartenstein 12Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
Spectrum allocation in Europe
ECC Decision of 14 March 2008on the harmonised use of the 5875-5925 MHz
frequency band for Intelligent Transport Systems (ITS)
See also:Frequency Allocation, D. Seeberger,
Daimler AGhttp://www.network-on-wheels.de/downloads/final-workshop
State-of-the-art – Scalability – Impact – Look ahead

Hannes Hartenstein 13Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
DIFS DIFS
Contentionphase
Busy
Backoff Slots
Busy
BA
C
A A wantswants to to transmittransmit
C C wantswants to to transmittransmit
B B wantswants to to transmittransmit
DIFS
Busy
Choose arandom waiting time
i in {0,…,CW}
8
7
Protocol architecture and specifications (1)
IEEE 802.11p currently standardized
Derivative of OFDM-based 802.11a
State-of-the-art – Scalability – Impact – Look ahead

Hannes Hartenstein 14Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
Protocol architecture and specifications (2)
PHY/MAC: IEEE 802.11p
Multichannel: IEEE 1609.4
Networking Services: IEEE 1609.3
Resource Manager: IEEE 1609.1 SecurityIEEE 1609.2
IEEE WAVE trial use standards
WAVE PHY
WAVE MAC
LLC
IPv6
UDP/TCPWSMP
Multi-ChannelOperation
WME
MIB
MLME
PLMEIEEE
160
9.3-
2007
State-of-the-art – Scalability – Impact – Look ahead

Hannes Hartenstein 15Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
Protocol architecture and specifications (3)
© Car-to-Car Communication Consortium Manifesto
State-of-the-art – Scalability – Impact – Look ahead

Hannes Hartenstein 16Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
Assessing the current state-of-the-art of V2X
Feasibility of direct and wireless multi-hop vehicle-to-vehicle and vehicle-to-infrastructure communication based on WLAN has been proven
Essential building blocks exist todaySpectrum (but 700 MHz band could be a ‘game change’)ProtocolsApplications, deployment scenariosSecurity concepts ...
Still: some “grand challenges” need our attention
State-of-the-art – Scalability – Impact – Look ahead

Hannes Hartenstein 17Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
Grand Challenges: an non-exhaustive overview
Does vehicle-to-X communication have a beneficial impact?
On traffic safety?On traffic efficiency?
Does it scale?Every vehicle sends out data IEEE 802.11: lots of packet collisions does vehicle-to-X communication have a beneficial impact?
Can the operation of those networks be (self-) managed?
1. Communication-centric aspect
2. System-centric aspect
3. Field operational test,cooperative systems look ahead

Hannes Hartenstein 18Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
Types of communication for active safety
Periodic messages („Beacons“)Obtain local traffic information to detect dangerous traffic situationsOne-hop broadcastsFigure of merit: probability of reception
Event-driven messages („Emergency message“)Hazard detected, needs to be communicatedInformation disseminationFigures of merit: probability of reception, latency
State-of-the-art – Scalability – Impact – Look ahead

Hannes Hartenstein 19Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
Scalability challenge (1)
11 vehicles per km and lane
Each vehicle sends 10 beacons/s
Size of beacon: 500 Bytes
Communication range: 1000m
Probability of reception?
Beaconing load:
66 vehicles per km
10 Hz
4 kb
2400m (carrier sense range)
about 6.3 Mbps
State-of-the-art – Scalability – Impact – Look ahead

Hannes Hartenstein 20Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
Scalability challenge (2)
O.k., example on previous slide is maybe ‚extreme‘... but a density of 11 vehicles per km and lane is not.
Options to reduce channel/beaconing load:Reduce packet sizeReduce rateReduce transmit power
What is the best choice (“optimal control”)?
As long there is no theory, we depend on simulations
“Credibility” of simulation results depends on “realistic” models
Let us have a look to “realistic” models first
State-of-the-art – Scalability – Impact – Look ahead

Hannes Hartenstein 21Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
Elements of „realistic“ simulations
Network Simulatorns-2
Vehicular MovementPatterns
IEEE 802.11p Radio PropagationModel - Nakagami
Reception andInterference Models
BugFixIEEE 802.11
MAC PerformanceMetrics
Overhaul of IEEE 802.11 modeling and simulation architecture in NS-2,Q. Chen, F. Schmidt-Eisenlohr, D. Jiang, M. Torrent-Moreno, L. Delgrossi, H. Hartenstein, Proc. ACM MSWiM, October 2007
Since March 31, 2008:
Part of NS-2.33
... still, results depend on parameter settings ... no agreed set yet
State-of-the-art – Scalability – Impact – Look ahead
Hannes Hartenstein 22Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
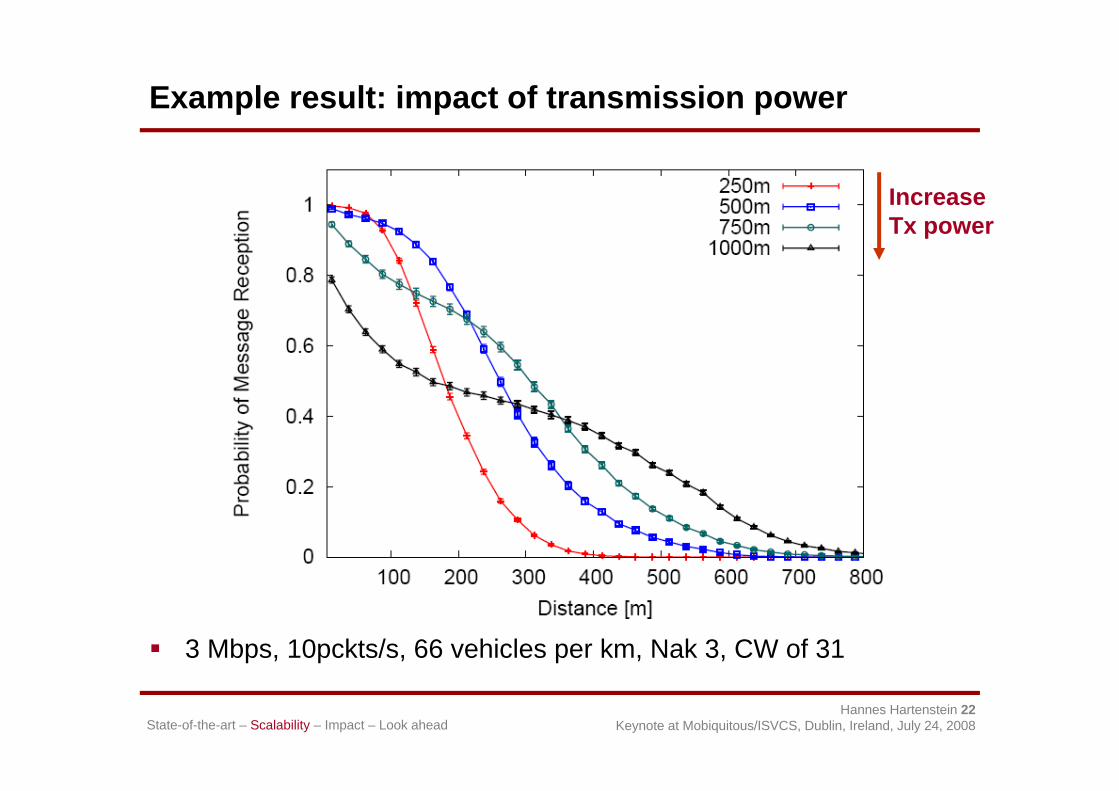
Example result: impact of transmission power
3 Mbps, 10pckts/s, 66 vehicles per km, Nak 3, CW of 31
State-of-the-art – Scalability – Impact – Look ahead
IncreaseTx power

Hannes Hartenstein 23Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
Transmit power control: D-FPAV
Our view: transmit power should be adjusted adaptivelyFinal option when packet size and rate cannot be further reduced
Fairness aspect is important
Distributed control is required
Goal: network-wide guaranteed “Maximum Beaconing Load”
MbpsMaximal channel bandwidth
Maximum Beaconing Load
Used for beaconing
Available for otherdata traffic
State-of-the-art – Scalability – Impact – Look ahead

Hannes Hartenstein 24Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
Result: traffic differentiation via power control
Nakagami (m=3), 10 packets/s, MBL 2,5Mbps (out of 3 Mbps), comm. range max. 1000m
State-of-the-art – Scalability – Impact – Look ahead

Hannes Hartenstein 25Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
Impact assessment of vehicle-to-X communication
From „quality of service“ to „quality of experience“
Requires coupling of simulators for communication system, mobility and driver behavior, application
For example, coupling of NS-2, VISSIM, Matlab as proposed by Lochert et al., ACM VANET 2005
Traffic safety Typically, scenarios contain up to several hundreds of vehiclesHigh accuracy
Traffic efficiency: Large-scale scenarios with up to several tens of thousands of vehiclesLess accuracy required than with assessment of traffic safety
State-of-the-art – Scalability – Impact – Look ahead

Hannes Hartenstein 26Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
Traffic safety: how to show the impact?
Requires accident modeling (driver behavior model)Wrong driving decision due to missing information or wrong assessment of the traffic situation
Our “first shot” experimentExtended Wiedemann follow-the-driver model by lane-change maneuverInstalled an “inattentive” driverVaried the amount of neighborhood information that the “inattentive”driver gets delivered by vehicular communicationSimple application classifying dangerous and non-dangerous traffic situations
State-of-the-art – Scalability – Impact – Look ahead

Hannes Hartenstein 27Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
Traffic safety: preliminary results (1)
The figure shows ‚trend lines‘ – results can definitely be improved
State-of-the-art – Scalability – Impact – Look ahead

Hannes Hartenstein 28Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
Traffic safety: preliminary results (2)
Probability of collision when wish to change
lanes is expressed
Probability of collision when changing lanes
The figure shows ‚trend lines‘ – results can definitely be improved
State-of-the-art – Scalability – Impact – Look ahead

Hannes Hartenstein 29Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
Traffic efficiency: how to show the impact?
Assume the following V2X scenarioSpeed funnel: from 120 km/h to 60 km/h over 900mCheck average velocity in dependency of equipped vehicles
geographical location [m]aver
age
velo
city
[km
/h]
Assume now 33 km of highway with about 3000 vehicles
State-of-the-art – Scalability – Impact – Look ahead

Hannes Hartenstein 30Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
Traffic efficiency: speed-up via hybrid simulation
Why simulating every beacon message of tens of thousand of vehicles when the object of interest is, e.g., dissemination of warning messages/speed limits?
Because “background traffic” matters ...
Idea: use of hybrid simulationBeaconing load: put into mathematical model (for probability of reception, latency)Warning messages: use standard discrete-event simulationsCan also be used for distinguishing between other data traffic classes (e.g. safety vs services)
Speed-up: we observed a gain of about 500 compared to standard NS-2
State-of-the-art – Scalability – Impact – Look ahead

Hannes Hartenstein 31Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
Traffic efficiency: example of analysis
Using the hybrid simulation approach
Work by S. Assenmacher and F. Busch, TU Munich
9001
9031
9061
9091
9121
9151
9181
9211
9241
9271
9301
9331
9361
9391
9421
9451
9481
9511
9541
9571
9601
9631
9661
600
780
960
1140
1320
1500
1680
1860
2040
2220
2400
2580
2760
2940
3120
3300
3480
3660
3840
4020
4200
4380
4560
4740
4920
5100
5280
5460
5640
5820
020406080100
120
140
160
180
Zeit [Sek]
v [km/h] 0-20 20-40 40-60 60-80 80-100 100-120 120-140 140-160 160-180
Conventional Dynamic Traffic Control
20 % C2X Penetration Rate
50 % C2X Penetration Rate
100 % C2X Penetration Rate
Conventional Dynamic Traffic Control
20 % C2X Penetration Rate
50 % C2X Penetration Rate
100 % C2X Penetration Rate
Time [sec]
Spa
ce[s
ectio
n-nu
mbe
r]D
rivin
gdi
rect
ion
9001
9031
9061
9091
9121
9151
9181
9211
9241
9271
9301
9331
9361
9391
9421
9451
9481
9511
9541
9571
9601
9631
9661
600
780
960
1140
1320
1500
1680
1860
2040
2220
2400
2580
2760
2940
3120
3300
3480
3660
3840
4020
4200
4380
4560
4740
4920
5100
5280
5460
5640
5820
020406080100
120
140
160
180
Zeit [Sek]
v [km/h] 0-20 20-40 40-60 60-80 80-100 100-120 120-140 140-160 160-180
Conventional Dynamic Traffic Control
20 % C2X Penetration Rate
50 % C2X Penetration Rate
100 % C2X Penetration Rate
Conventional Dynamic Traffic Control
20 % C2X Penetration Rate
50 % C2X Penetration Rate
100 % C2X Penetration Rate
Time [sec]
Spa
ce[s
ectio
n-nu
mbe
r]D
rivin
gdi
rect
ion
State-of-the-art – Scalability – Impact – Look ahead

Hannes Hartenstein 32Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
Impact assessment: status quo
We studied basic methodologyNot the final wordMuch room for improvement
We need better modelsSafety aspect
Accident modelsDriver behavior models (how does a driver react on V2X information?)
Efficiency aspectMathematical models needed for probability of reception or latency under various conditions
Collaboration of transportation engineers and communication experts is essential
State-of-the-art – Scalability – Impact – Look ahead

Hannes Hartenstein 33Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
Look ahead: field operational tests (1)
© Photo by M. Miller, Nordsys
FleetNetdemonstator 2002-2003
Network-on-Wheels demonstrator May 2008
State-of-the-art – Scalability – Impact – Look ahead

Hannes Hartenstein 34Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
Look ahead: field operational tests (2)
California VII test bed http://vii.path.berkeley.edu/vii/monitor/
State-of-the-art – Scalability – Impact – Look ahead

Hannes Hartenstein 35Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
Look ahead: field operational tests (3)
Again, a scalability challengealso for operation & management
Simulations and impact assessment required for network and experiment planning
EU FP7 Support Action on Field Operational Test (FESTA)
Handbook available since April 2008Covering: performance indicators, experimental procedures, data acquisition ...But also: legal and ethical issues, insurance issues ...
State-of-the-art – Scalability – Impact – Look ahead

Hannes Hartenstein 36Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
Look ahead: towards truly cooperative systems
V2X level
operator level
governmental level
Cooperation on various levels ...
traffic level
State-of-the-art – Scalability – Impact – Look ahead

Hannes Hartenstein 37Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
Summary (outline of the talk)
Assessing the current state-of-the-art in vehicle-to-X communication
Traffic telematics today: public transport, road operatorsStatus quo of vehicle-to-X system design
Two „grand challenges“ of vehicle-to-X communicationScalability: radio channel congestion controlImpact assessment of vehicle-to-X communication
A look ahead Field operational testsCooperative systems

Hannes Hartenstein 38Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
Conclusion: vehicle-to-X communication
We came a long way ...Fundamental building blocks available today
But we still need a better understanding ...How do technology/parameter/configuration settings influence scalability and system impactAnalysis – Simulation – Field tests
When is the right time to deploy a first generation of a vehicle-to-X communication system?
Maturity is a big issue: system has to work reliably in *all* situations
My point of view: no way back!
... let us avoid this:

Hannes Hartenstein 39Keynote at Mobiquitous/ISVCS, Dublin, Ireland, July 24, 2008
Selected references
A tutorial survey on vehicular ad hoc networks, H. Hartenstein, K. Laberteaux, IEEE Communications Magazine, vol. 46, no. 6, June 2008, pp. 164-171
Overhaul of IEEE 802.11 modeling and simulation architecture in NS-2, Q. Chen, F. Schmidt-Eisenlohr, D. Jiang, M. Torrent-Moreno, L. Delgrossi, H. Hartenstein, Proc.10th ACM/IEEE MSWiM, Chania, Greece, October 2007, pp. 159-168
Enabling efficient and accurate large-scale simulations of VANETsfor vehicular traffic management, M. Killat, F. Schmidt-Eisenlohr, H. Hartenstein, Chr. Rössel, P. Vortisch, S. Assenmacher, F. Busch, Proc. 4th ACM VANET, Montreal, Quebec, Canada, September 200, pp. 29-38
Distributed fair transmit power adjustment for vehicular ad hoc networks, M. Torrent-Moreno, P. Santi, H. Hartenstein, Proc. 3rd IEEE SECON, Reston, VA, USA, September 2006, pp. 479 - 488
Please also look at upcoming PIMRC’08 and VANET’08 papers
http://dsn.tm.uka.de/english/publications.php