Embed Size (px)
Citation preview

5/12/2018 Vehicle Dynamics With Independent 4WS - slidepdf.com
http://slidepdf.com/reader/full/vehicle-dynamics-with-independent-4ws 1/20
Vehicle dynamics of a car with independent four
wheel steering
J P Wideberg
School of Engineering, Transportation Engineering, University of Seville, Camino de los Descubrimientos
s/n, 41092 Sevilla, Spain,
Abstract: Current advances in the application of control systems to vehicle dynamics have begun to make it
practicable to accomplish improvement to the vehicle's lateral and vertical dynamics. Examples are ESP
(individual wheel braking) to preventing its loss of stability, and active suspension to increase ride comfort. .
In this article the equations of motions for a vehicle with totally independent four wheel steering is presented.
A procedure is proposed where the control system detects the forces of a wheel is about to saturate and acts
accordingly to prevent this. The dynamic system is designed to give vehicles substantially enhanced active
safety and dynamic handling control.
Keywords: vehicle dynamics, four wheel steering, simulation, steer by wire, handling
NOTATION
fl front left
fr Front right
rl Rear left
rr Rear right
b Distance from the centre of gravity to the front axle (m)
c Distance from the centre of gravity to the rear axle (m)
L Distance between axles (m)
m Total mass of the vehicle (kg)
5/12/2018 Vehicle Dynamics With Independent 4WS - slidepdf.com
http://slidepdf.com/reader/full/vehicle-dynamics-with-independent-4ws 2/20
mr Mass (weight) on rear axle (kg)
mf Mass (weight) on front axle (kg)
vx Velocity in forward direction (m/s)
vy Velocity in lateral direction (m/s)
Ω Yaw speed (rad/s)
β Float angle (rad)
φ Body roll angle (rad)
ϕ Pitch angle (rad)
E Young’s modulus (MPa)
ijα Slip angle of tire; i=f (front) or r (rear), j=l (left) or r (right) (rad)
f C
α Cornering stiffness, front tire (kN/rad)
r C
α Cornering stiffness, rear tire (kN/rad)
I i Moment of inertia, i=x,y,z (mm4)
Fc Centrifugal force (N)
Fijk Reaction force at tire (N), i=x,y,z; j=f, r; k=l, r
ay Lateral acceleration (m/s2)
vcrit Critical speed (m/s)
Wstat weight transfer due to static equilibrium (N)
W brake weight transfer between axles when braking or accelerating (N)
Wroll lateral weight transfer from one side of the car to the other (N)
Wsusi The lateral weight transfer due to unsprung masses (N)
Wusi The lateral weight transfer due to body roll (N)
Whsusi Lateral weight transfer due to the roll center height (N)

5/12/2018 Vehicle Dynamics With Independent 4WS - slidepdf.com
http://slidepdf.com/reader/full/vehicle-dynamics-with-independent-4ws 3/20
DOF Degree of freedom
FEA Finite element analysis
MBS Multi body system
SBW Steer By Wire
SUV Sport Utility Vehicle

5/12/2018 Vehicle Dynamics With Independent 4WS - slidepdf.com
http://slidepdf.com/reader/full/vehicle-dynamics-with-independent-4ws 4/20
1 Background
Four Wheel Steering System and Steer by Wire
All early control and steering system was manoeuvred manually. For instance, the car brake
mechanism was directly connected using a steel wire. The same system was used for an
early road vehicles; a mechanical connection was provided between a steering wheel and a
front wheel via steering column and a set of gears.
The manual system required force that had to be applied by the muscle power and new
systems were developed, where the steering of an airplane or the front wheel of a vehicle
was operated through hydraulic or electric driving mechanisms.
Since then, remarkable progresses have been made in aviation and the latest airplanes
transmits a control stick movement to a computer in terms of electric signals and the
computer, in turn, sends an electric command to a driving mechanism. This system is called
Fly-by-Wire (FBW) system. The system used in the FBW system is a control bus (ECU).
Recently, the FBW system of the aviation industry has been transferred the automobile
industries and has resulted in a Steer-by-Wire (SBW) system.
The SBW system can operate a control system in order to keep the same turning state
regardless of the disturbances. In conventional steering systems, disturbances such as
vehicle speed variations, road surface conditions, air resistance and others result in the
change in the vehicle turning speed with approximately the same wheel angle. By using
“steer-by-wire” technology the question of a suitable interface to the human arises. As the

5/12/2018 Vehicle Dynamics With Independent 4WS - slidepdf.com
http://slidepdf.com/reader/full/vehicle-dynamics-with-independent-4ws 5/20
driver must not necessarily feel the forces exerted on the tires, new information about the
vehicle dynamics can and must be transmitted. For instance the experienced driver feels a
force relative to the rolling of the vehicle, and is warned that a dangerous situation is
eminent. By introducing a sophisticated SBW system it is necessary of the controller to
interfere. One of the principal questions is however; is it worth installing i.e. does the
additional cost of installation cover the benefits obtained? Active suspension systems and
active four-wheel steering does not seem to be feasible except for luxury cars, nevertheless
this was the case for ABS or ESP not too long ago and now these systems are virtually
standard in all new automobiles.
Four wheel steering
In 1832 Joseph Gibbs and William Chaplin [4] filed a Patent in England for a four wheel
steering system. Unfortunately it did not work well due to the fact that the system did not
have a common point of rotation and thus introducing a large amount of slip. Since than a
great amount of patents and papers has been published regarding this subject. Noteworthy
are the work of Nalecz [5], Ackermann [1] and Abe [2].
Four wheel steering provides added stability at higher speeds by steering the rear wheels in
the same direction as the front wheels. This reduces the vehicle yaw required to accomplish
a manoeuvre like for instance: lane change or elusive manoeuvres and even under adverse
road conditions, thus stabilizing vehicle response. This, in turn, reduces the yaw velocity
gain and increases yaw damping of the vehicle. The result is increased stability, reduced
sway, and reduced driver corrective steering to external disturbances such as wind gusts,
vehicles passing, and irregular road surfaces.

5/12/2018 Vehicle Dynamics With Independent 4WS - slidepdf.com
http://slidepdf.com/reader/full/vehicle-dynamics-with-independent-4ws 6/20
2 Introduction
A model will be presented that is intended for the engineer who wants to simulate the
essential handling behaviour of an automobile without using MBS and without the
particulars associated with component-level details (linkage geometry, etc.). Equations are
going to be derived for the case of a four wheel vehicle with steering on both axles. All
steering angles assumed to be independent. For example on one axle the left and the right
angle are not the same nor are they related through the Ackermann angle. The point of this
is to take advantage of the four wheel steering using steer-by-wire. As each wheel can have
its individual steering actuator. The advantage is that if there is no mechanical connection
between two wheels on one axle then the relation between the left-hand and right-hand
angle can depend on the forward speed (Speed sensitive behaviour), it can be controlled by
sophisticated control algorithms and it can be used as an integral part of the active security
system of the car. It can also be used as driving assistance, to improve driving stability and
for autonomous driving. Perhaps the most popular system to improve stability is the
Electronic Stability Program (ESP) by Bosch. The principal goal of the ESP control system
is to keep the vehicle as close as possible to the trajectory intended by the driver. Selective
breaking of single wheels is used to achieve this. By using SBW a similar stabilizing effect
can be achieved by changing the steer angle of a single wheel. This should be done at the
wheel that is closest to be fully saturated, i.e. when the tire is about to skid.
3 Three Dimensional Vehicle model
In this paper the equations are expressed as scalar equations. It is desirable to express these
without introducing the heading angle therefore “vehicle fix coordinates” are used,

5/12/2018 Vehicle Dynamics With Independent 4WS - slidepdf.com
http://slidepdf.com/reader/full/vehicle-dynamics-with-independent-4ws 7/20
otherwise an extra integration would be needed when solving (to keep track of heading
angle). The road is considered to be flat hence the motion will be planar.
The governing dynamics equations can then be expressed as:
m(dV
x
dt −V
yΩ) = F
xfl cos(δ
fl )+ F
xfr cos(δ
fr )− F
yfl sin(δ
fl )− F
yfr sin(δ
fr )+
+ F xrl
cos(δ rl )+ F
xrr cos(δ
rr )+ F
yrl sin(δ
rl )+ F
yrr cos(δ
rr )
(1.1)
m(
dV y
dt +
V xΩ)=
F xfl sin(δ
fl )+
F xfr sin(δ
fr )+
F yfl cos(δ
fl )+
F yfr cos(δ
fr )+
+ F yrl
cos(δ rl )+ F
yrr cos(δ
rr )− F
xrl sin(δ
rl )− F
xrr sin(δ
rr )
(1.2)
d Ω
dt I
z = F
xfl sin(δ
fl )b+ F
xfl cos(δ
fl )t
f + F
xfr sin(δ
fr )b− F
xfr cos(δ
fr )t
f +
+ F yfl
cos(δ fl )b− F
yfl sin(δ
fl )t
f + F
yfr cos(δ
frr )b+ F
yfr sin(δ
fr )t
f −
− F yrl
cos(δ rl )c − F
yrr cos(δ
rr )c + F
xrl sin(δ
rl )c+ F
xrr sin(δ
rl )c+
+
F yrl sin(δ
rl )t r +
F xrr cos(δ
rl )t r −
F yrr sin(δ
rr )t r −
F xrr cos(δ
rr )t r
(1.3)
I x
d 2ϕ
dt 2= [−( K
ϕ ϕ +C
ϕ ϕ
.
+ F yh+m
2 ghϕ + t
r F
zrl + t
f F zfl
)+ t r F
zrr + t
f F zfr
] (1.4)
I y
d 2φ
dt 2= [−( K
φ φ +C
φ φ .
+m2 ghφ +m
2a xh+ cF
zrr + cF
zrl )+ bF
zfr + bF
zfl ] (1.5)
d=
dt
ψ Ω (1.6)
x ydX =V cos - V sindt
ψ ψ ⋅ ⋅
(1.7)
y x
dY=V cos + V sin
dtψ ψ ⋅ ⋅ (1.8)

5/12/2018 Vehicle Dynamics With Independent 4WS - slidepdf.com
http://slidepdf.com/reader/full/vehicle-dynamics-with-independent-4ws 8/20
where equations (1.1) to (1.5) are the governing equations of the vehicle dynamics. The
standard simplification of small angles is not considered because a closed solution is not
necessary and the equations are easy to solve numerically. The three following equations
(1.6)-(1.8) are needed to find out the global heading angle ψ and the global coordinates X
and Y.
3.1 Slip angles
Thetiremodelpresentedneedstheslipangleα asinput.Theslipanglesaredefinedas
follows:
y
fl fl
x
y
rl rl
x
V +btan( - )=
V
V -ctan( - )=
V
f
r
t
t
δ α
δ α
⋅ Ω
+ ⋅ Ω
⋅ Ω
+ ⋅ Ω
(1.9)
y
fr fr
x
y
rr rr
x
V +btan( - )=
V
V -c
tan( - )= V
f
r
t
t
δ α
δ α
⋅ Ω
− ⋅ Ω
⋅ Ω
− ⋅ Ω
(1.10)
3.2 Vertical Loads
The normal reaction under each tire can be calculated using the Equation(1.11). It is
divided in three parts: Wstat which is a pure static equilibrium, W brake which is the amount of
weight transfer from one axle to another when braking or accelerating and Wroll which is the
lateral weight transfer from one side of the car to the other.
zi stat brake roll F W W W = + + (1.11)

5/12/2018 Vehicle Dynamics With Independent 4WS - slidepdf.com
http://slidepdf.com/reader/full/vehicle-dynamics-with-independent-4ws 9/20
2
2
2
2
zfl brake rollf
zfr brake rollf
zrl brake rollr
zrr brake rollr
mgc F W W
L
mgc F W W
L
mgb F W W L
mgc F W W
L
= + +
= + −
= + +
= + −
(1.12)
where
W brake
=
m susp
a xh
2 L+
musf a xhusf
2 L+
musr a xhusr
2 L(1.13)
and
rolli susi usi hsusiW W W W = + + (1.14)
i stands for either r or f and where Wsusi, Wusi and Whsusi are defined below.:
The lateral weight transfer due to unsprung masses is calculated as:
W usf = m
usf V y+V
xΩ( )
husf
2t f
W usr = m
usr V y+V
xΩ( )
husr
2t r
(1.15)
The lateral weight transfer due to body roll can be expressed as:
W susf
= m susp
V y+V
xΩ( )h1cosφ
K f
2t f
K ∑
W susr
= m susp
V y+V
xΩ( )h1cosφ
K r
2t r
K ∑
(1.16)
Lateral weight transfer due to the roll center height is expressed as:
W hsusf
= m susp
V y+V
xΩ( )
ch f
2 Lt f
W hsusr
= m susp
V y+V
xΩ( )
bhr
2 Lt r
(1.17)

5/12/2018 Vehicle Dynamics With Independent 4WS - slidepdf.com
http://slidepdf.com/reader/full/vehicle-dynamics-with-independent-4ws 10/20
3.3 Tire model
The elastic deformation of a tire is extremely complex due to the non-linearity and
theoretical computation requires numerical solution with for instance FEA. There are
several nonlinear tire models available, e.g. the CALSPAN tire model, the brush model or
the UMTRI model. However, industry and academia have reached apparent consensus in
recent years on the use of “magic formula”, developed by Pacejka et.al, [¡Error! No se
encuentra el origen de la referencia.] which summarizes experimental and theoretical data.
It allows one to compute forces at a higher precision than the common linearized
assumption, but without integrating equations. The tire model allows determination of all
six of the forces and moments generated by the tire: longitudinal force, lateral force,
vertical force, rolling resistance, overturning moment and self-aligning torque. Therefore,
forces can be computed in real-time. A pneumatic tire usually have a peak at about 4 to 6
degrees of slip where the cornering force decreases as slip increases on either side of the
peak. Past this peak, the vehicle will experience “dynamic understeer”, where turning the
wheel more makes the cornering conditions worse.
( )( )( )( ) sin arctan arctan y x C Bx E Bx Bx= − − (1.18)
( ) ( )v
h
Y X y x S
x X S
= +
= + (1.19)
The factor B is called the stiffness factor and it controls the slope of the curve at the origin.
The parameter C is called the shape factor and limits the range of the arguments in the sinus
function The parameter D is the maximum value the force or moment apart from the small

5/12/2018 Vehicle Dynamics With Independent 4WS - slidepdf.com
http://slidepdf.com/reader/full/vehicle-dynamics-with-independent-4ws 11/20
effect due to the S v term. The product BCD gives the slope and corresponds to the initial
cornering stiffness. S v and S h are the horizontal and vertical shift, respectively. They are
introduced to allow for non-zero forces and moments at zero slip. (See Wong [¡Error! No se
encuentra el origen de la referencia.] for details).
4 Control law
Many control laws can be implemented in order to minimize for instance the body roll or to
prevent over/under steer. There is a wealth of such control laws published in recent years
notable are the works of Abe [2] and Horiuchi [6]. The latter defines the control law as:
r r k k
δ δ δ
Ω= + Ω (1.20)
where
2 2( )
2
f
r
t y f r
r
r y
K k
K
mV bK cK k
K V
δ = −
+ −
=
(1.21)
This law is easy implemented in the model used. The equations presented in this article are
not in a closed form nor are they linearlized. That is not necessary because of the tools used
to resolve the equations. The model is done using MATLAB™/ SIMULINK™. Figure 2
shows the SIMULINK interface with all the equations represented. This chart is difficult to
assimilate therefore in Figure 3 a simplified chart is presented. It is a schematic and
simplified picture to show more clearly how the different parts are related.
An alternative algorithm is also evaluated. It is based upon the control scheme by Horiuchi
[6] but also monitors the forces on each wheel and if it is about to saturate then that

5/12/2018 Vehicle Dynamics With Independent 4WS - slidepdf.com
http://slidepdf.com/reader/full/vehicle-dynamics-with-independent-4ws 12/20
individual wheel changes the steering angle a certain amount so that the tires do not
saturate.
To do this a variable is introduces defined as:
zij
3
zij
F
2F1+
mg
zij B
µ =
⎛ ⎞ ⎜ ⎟
(1.22)
which is compared to the normal force of each tire, if the absolute value of this variable is
greater or equal to the normal force then no action is taken. On the contrary if the absolute
value of this variable is less than the normal force then the steering angle is changed
according to the equation (1.24) below. The steering angle, for the tire ij, is then changed
back to the original after two revolutions of the tire.
( ) ( 1) zij yij ij ij B F t t δ δ ≥ ⇒ = − (1.23)
3( ) ( 1)
5 zij yij ij ij
B F t t δ δ < ⇒ = − (1.24)
i=front or rear, j=left or right.
The novelty of this approach is that a single wheel can be steered independently of the rest
of the tires. For instance, if the vehicle travels in a curve to the right and accelerates at the
same time then weight will be transferred to the rear left. The lateral force, in an extreme
situation, may be close to saturating and thus staring to skid. Modifying that tire in such
away that the slip angle decreases would be a way to prevent the vehicle to skid and
consequently preventing it to become uncontrollable.
5 Results and Conclusion

5/12/2018 Vehicle Dynamics With Independent 4WS - slidepdf.com
http://slidepdf.com/reader/full/vehicle-dynamics-with-independent-4ws 13/20
The system varies the steer angle on the wheel with the highest loading between 0 and 1
degrees if the tire forces is about to saturate which depends on the road situation. If there is
a risk of skidding, the steer angle on one individual wheel is decreased by an appropriate
degree. It provides in the order of 10 to 25 percent more lateral stability than a conventional
system with 4WS. This significantly enhances active safety, since better lateral stability
equals superior road adhesion and better cornering stability.
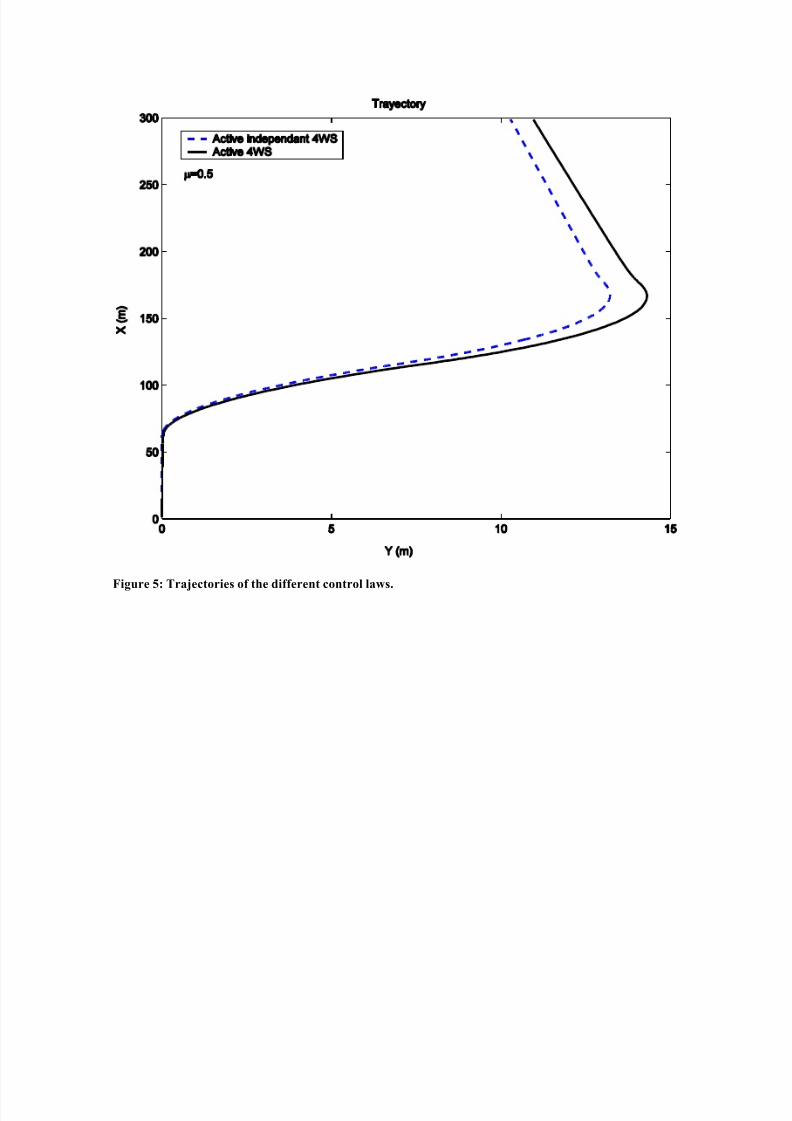
An example simulation is made and the results are presented in Figure 4 to Figure 7. In
Figure 4 it can clearly be seen that the lateral acceleration decreases each time the control
systems modifies the steering angle. This can be on any single tire or on several it depend if
the condition (Equation (1.23) or (1.24) ) is satisfied or not. The effect is more notable in
the lateral velocity which is noticeably diminished (Figure 6). This effect is also depicted in
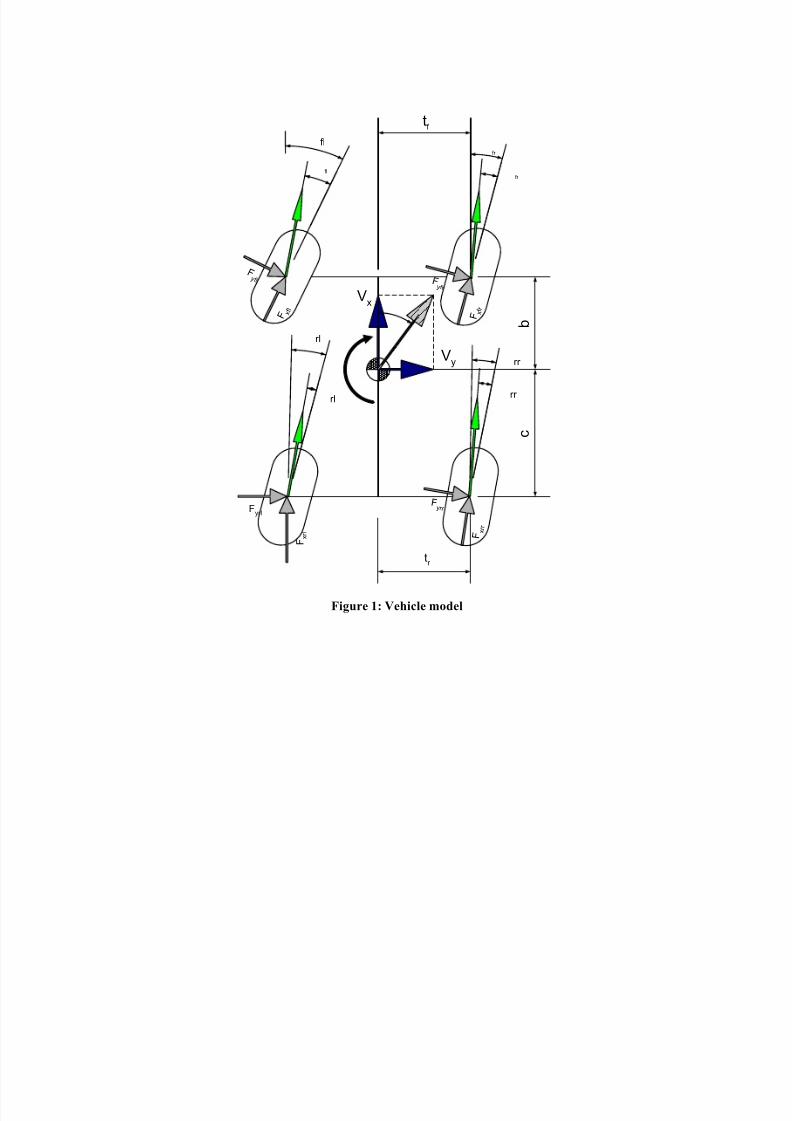
Figure 5. It is very interesting to plot the yaw rate versus the float angle (see β in Figure 1 )of the vehicle such as in Figure 7. Here it can be clearly seen that both the yaw velocity and
the float angle has improved. Particularly the float angle, which leads to more exact
handling and the ability to stay on track.

5/12/2018 Vehicle Dynamics With Independent 4WS - slidepdf.com
http://slidepdf.com/reader/full/vehicle-dynamics-with-independent-4ws 14/20
References
1. Ackermann, J. (1994) ‘Robust Decoupling, Ideal Steering Dynamics and Yaw
Stabilization of 4WS Cars’, Automatica, Vol.30, No.11.2. Abe, M. (1995) ‘Direct Yaw Moment Control for Improving Limit Performance of
Vehicle Handling - Comparison and Cooperation with 4WS’ 14th IAVSD
Symposium. 3. Sakai S., Sado H, and Hori Y., “Motion Control in an Electric Vehicle with 4
Independently Driven In-Wheel Motors” IEEE Trans. on Mechatronics, Vol. 4, No.1, pp.9-16, 1999.
4. Gibbs, J. and Chaplin, W. (1832) GB-patent 6241 from March 8th
.5. Nalecz, A.G. and Bindemann, A.C. (1989) ‘Handling Properties of Four Wheel
Steering Vehicles’ SAE Special Publications, No. 890080.6. Horiuchi, S. and Okada, K. (1999) ‘Improvement of a vehicle handling by nonlinear
integrated control of four wheel steering and four wheel torque’, JSAE Review Vol.20, pp. 459-464.
5/12/2018 Vehicle Dynamics With Independent 4WS - slidepdf.com
http://slidepdf.com/reader/full/vehicle-dynamics-with-independent-4ws 15/20
fr
rl rr
tf
tr
b
c
fl
fl
fr
F x f l
F y f l F
y f r
Fx
f r
Fyrl
F y r r
F x r l
Fx
r r
Vx
Vy rr
rl
Figure 1: Vehicle model

5/12/2018 Vehicle Dynamics With Independent 4WS - slidepdf.com
http://slidepdf.com/reader/full/vehicle-dynamics-with-independent-4ws 16/20
Figure 2: Simulink flowchart representing the 4WS dynamics simulation
Slipangles
Verticalloads
Steeringinput
Magic formulatire model
Vehicle model
dynamics
equations
Feedback to control system
Controlsystem
Output Figure 3: Data flow of the vehicle dynamics algorithm

5/12/2018 Vehicle Dynamics With Independent 4WS - slidepdf.com
http://slidepdf.com/reader/full/vehicle-dynamics-with-independent-4ws 17/20
Figure 4: Lateral acceleration vs. time
5/12/2018 Vehicle Dynamics With Independent 4WS - slidepdf.com
http://slidepdf.com/reader/full/vehicle-dynamics-with-independent-4ws 18/20
Figure 5: Trajectories of the different control laws.

5/12/2018 Vehicle Dynamics With Independent 4WS - slidepdf.com
http://slidepdf.com/reader/full/vehicle-dynamics-with-independent-4ws 19/20
Figure 6: Lateral velocity vs. time

5/12/2018 Vehicle Dynamics With Independent 4WS - slidepdf.com
http://slidepdf.com/reader/full/vehicle-dynamics-with-independent-4ws 20/20
Figure 7: Yaw velocity vs. slip angle β