Embed Size (px)
DESCRIPTION
UTN synthetic noise generator. M. Hueller LTPDA meeting, Barcelona 26/06/2007. Purpose. Simulate noise data with given continuous spectrum Choose between input the model parameters (developing and modeling) fit experimental data Use as a tool for system identification: data simulation. - PowerPoint PPT Presentation
Citation preview
UTN synthetic noise generator
M. Hueller
LTPDA meeting, Barcelona 26/06/2007
2
Purpose
Simulate noise data with given continuous spectrum
Choose between input the model parameters (developing and
modeling) fit experimental data
Use as a tool for system identification: data simulation
3
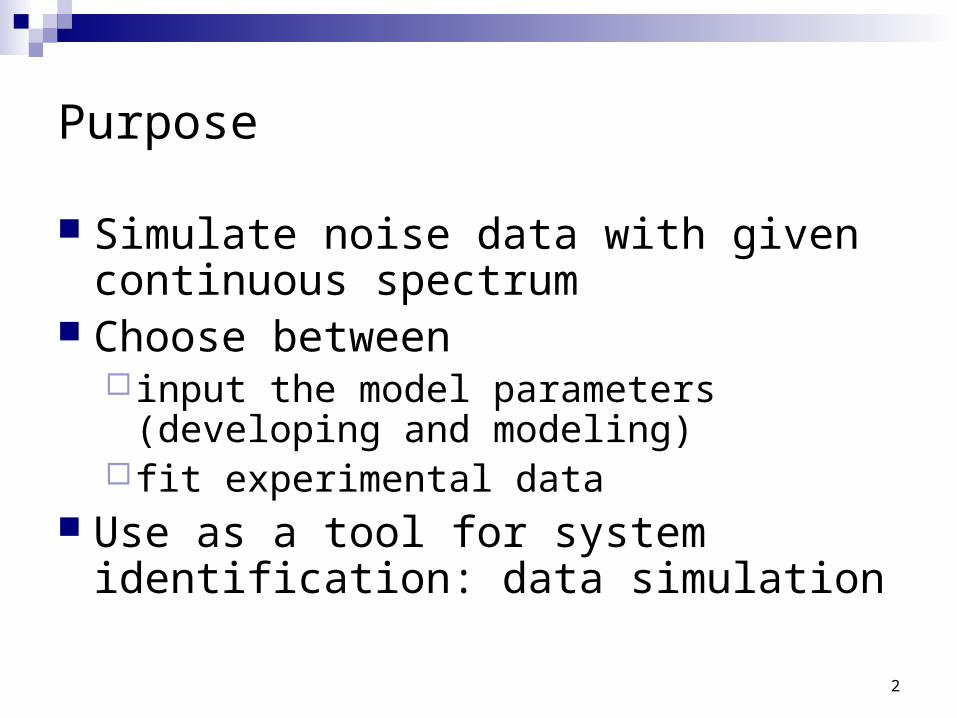
The approach (1) x(t) is the output of a filter, with transfer
function H(), with a white noise (t) at input, with PSD=S0
2
, 0x xS H S
1
1
1
z
p
p
N
Nkk lN
l ll
l
i sA
Hi s
i s
Assuming that the transfer
function H() has the form
then the process x(t) can be seen as
1
pN
ll
x t y t
'
0' d 'ls t
l ly t A e t t t
the process x(t) is equivalent to Np correlated processes
4
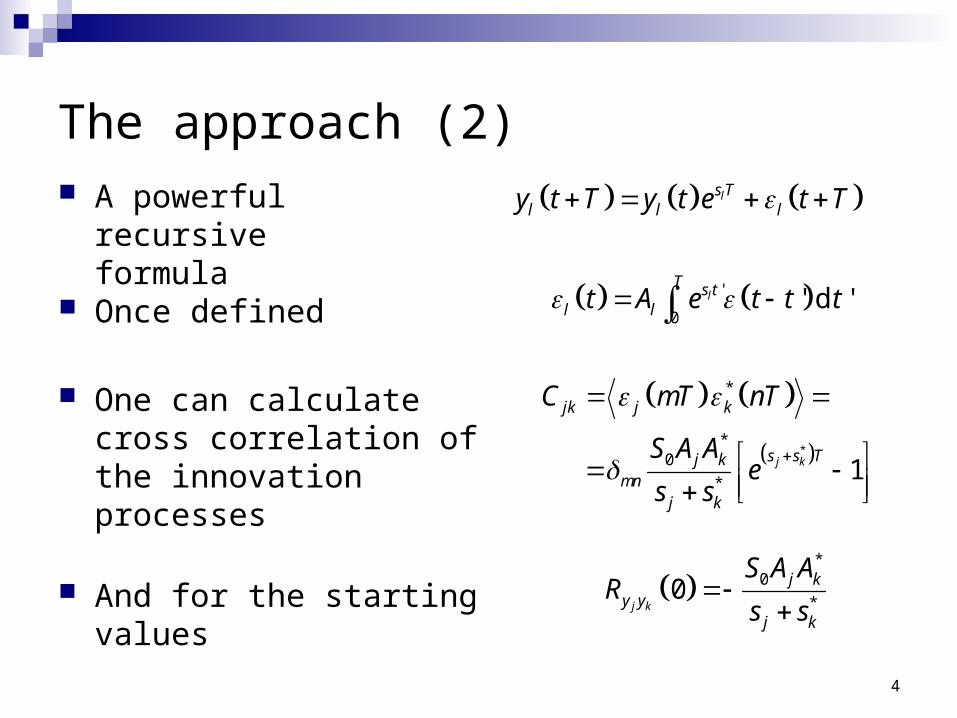
The approach (2)
Once defined
A powerful recursive formula
ls Tl l ly t T y t e t T
'
0' d 'l
T s tl lt A e t t t
One can calculate cross correlation of the innovation processes
*
*
*0
* 1j k
jk j k
s s Tj kmn
j k
C mT nT
S A Ae
s s
*
0
*0
j k
j ky y
j k
S A AR
s s
And for the starting values
5
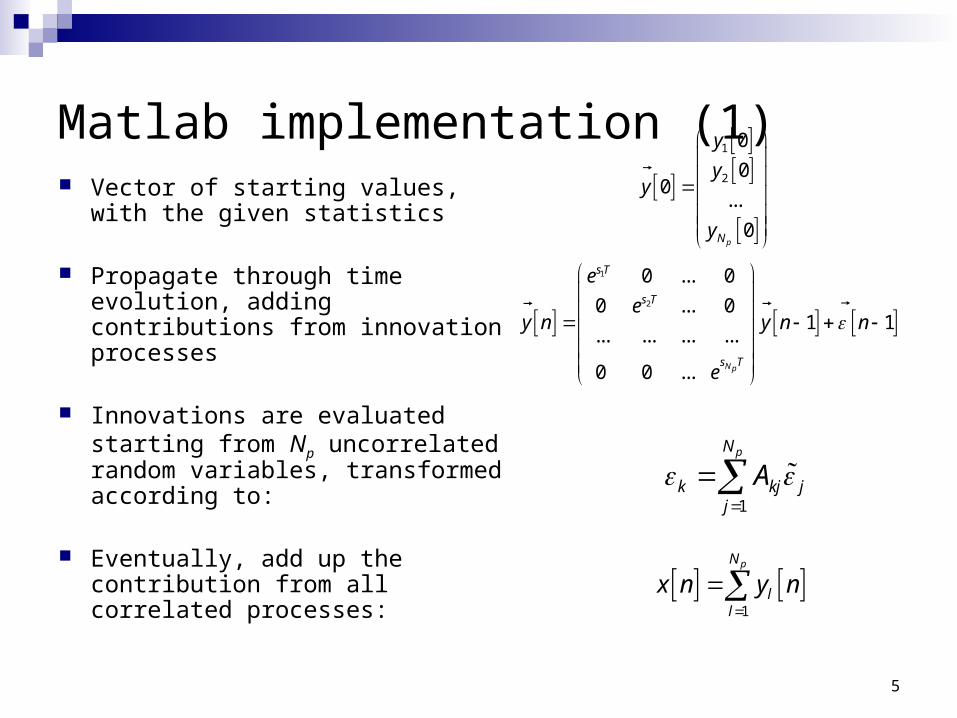
Matlab implementation (1) Vector of starting values, with the
given statistics
Propagate through time evolution, adding contributions from innovation processes
Innovations are evaluated starting from Np uncorrelated random variables, transformed according to:
Eventually, add up the contribution from all correlated processes:
1
2
0
00
...
0pN
y
yy
y
1
2
0 ... 0
0 ... 01 1
... ... ... ...
0 0 ... Np
s T
s T
s T
e
ey n y n n
e
1
pN
ll
x n y n
1
pN
k kj jj
A
6
Matlab implementation (2)
The base changing matrix Akj contains the eigenvectors of the cross-correlation matrix (diagonalization)
Additionally, a phase factor must be applied to each eigenvector, to allow the sum of all the Np contribution to be real
↓
Force the first element of each eigenvector to be real
7
Major problems solved, minor remaining Associated with the “initial rotation” of the eigenvalues Visible as a residual imaginary part Arising with complex poles too near or too far in frequency
Converted into AOs class Parameters passed with a plist Spectral data to be fitted passed through an AO containing
fsdata
Merged into the LTPDA GUI Problem passing the poles list (a Nx2 matrix), possible
workaround through some class (miir?)
8
Input parameters: available features
LP filters HP filters f -2 noise, by a LP filter with roll-off at very low
frequency Mechanical resonances Mechanical forcing lines (not yet implemented)
9
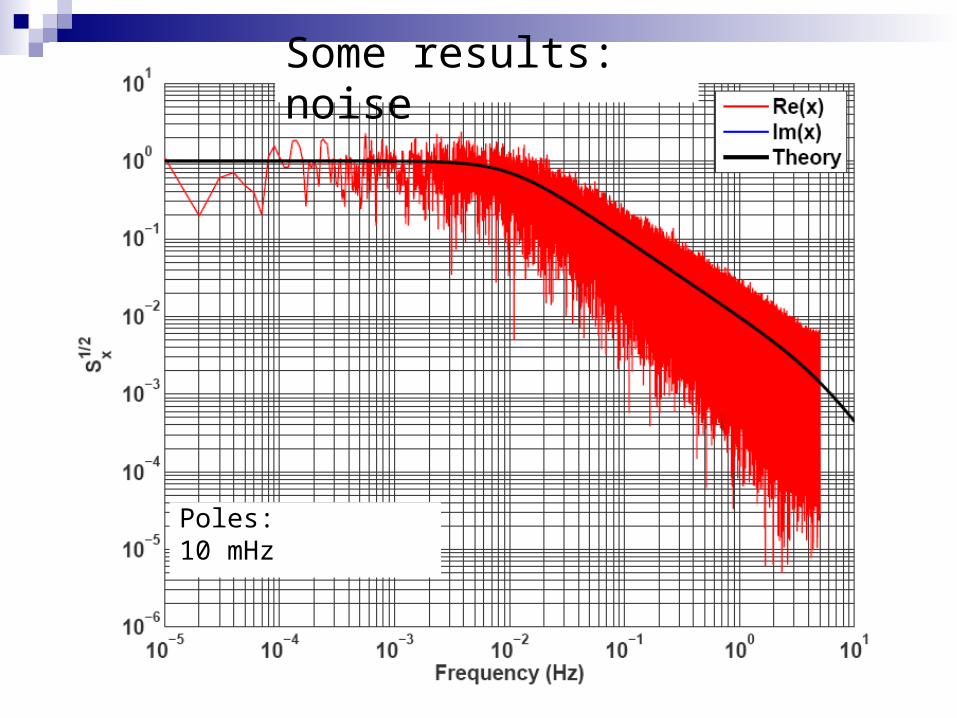
Some results: noise
Poles: 10 mHz
10
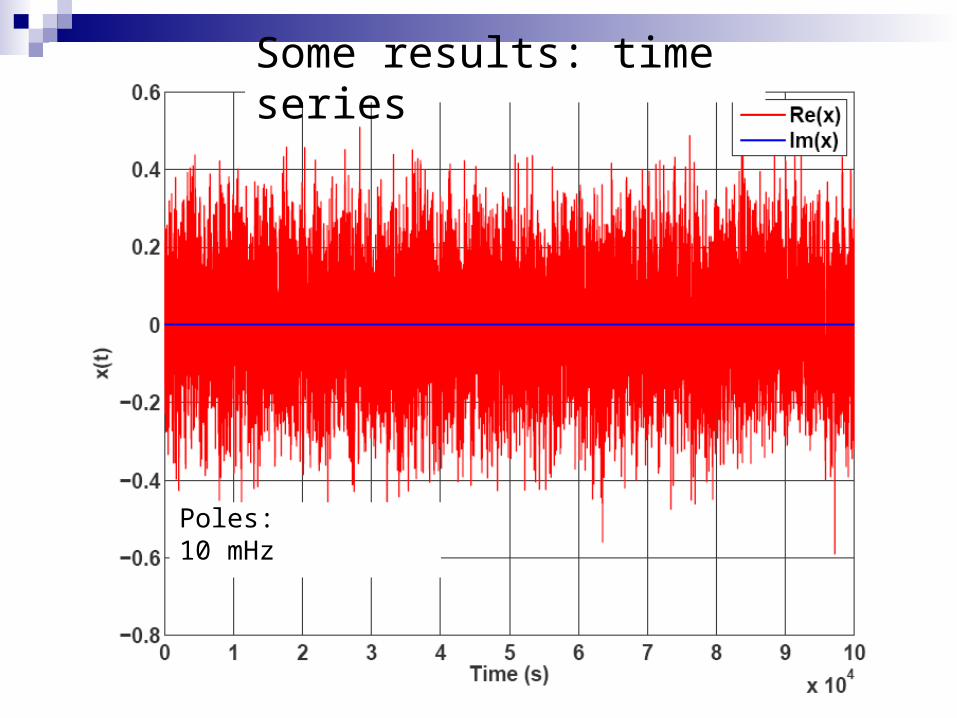
Some results: time series
Poles: 10 mHz
11
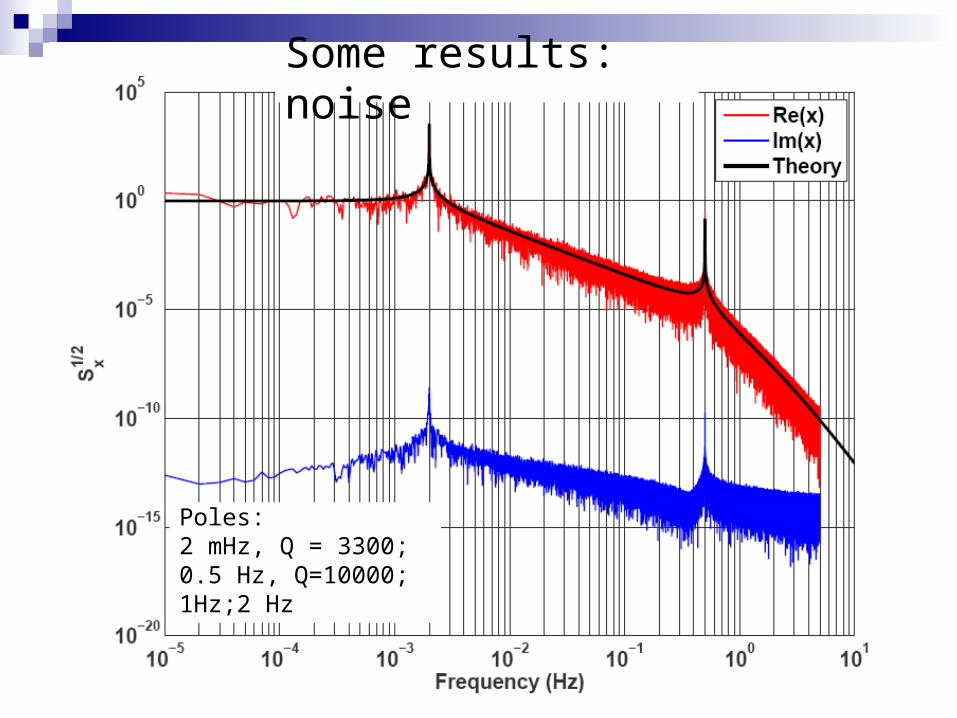
Some results: noise
Poles: 2 mHz, Q = 3300; 0.5 Hz, Q=10000;1Hz;2 Hz
12
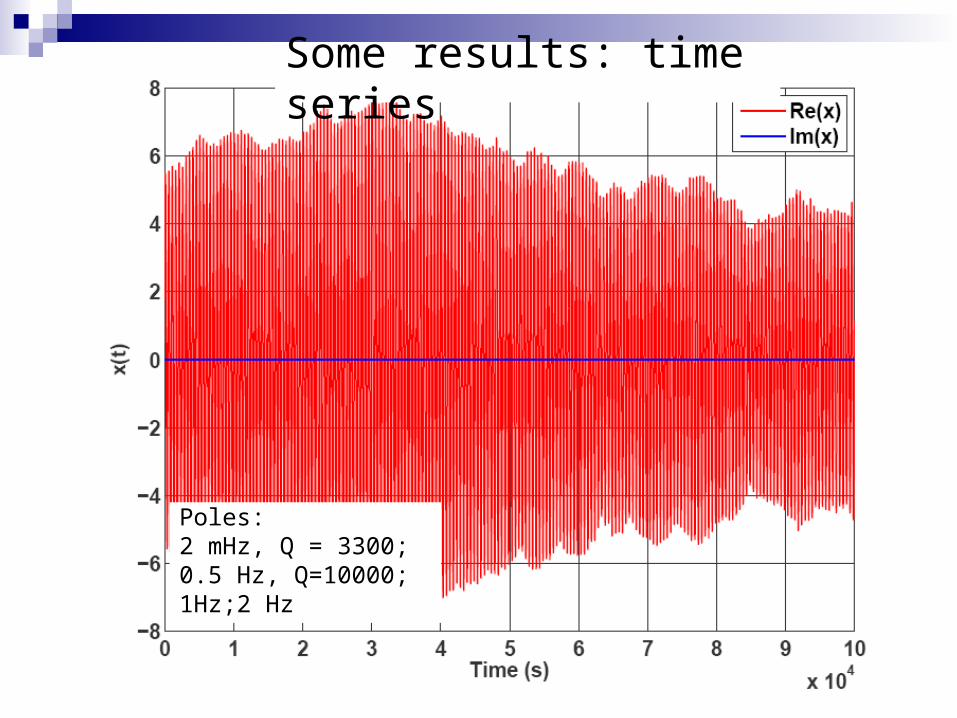
Some results: time series
Poles: 2 mHz, Q = 3300; 0.5 Hz, Q=10000;1Hz;2 Hz
13
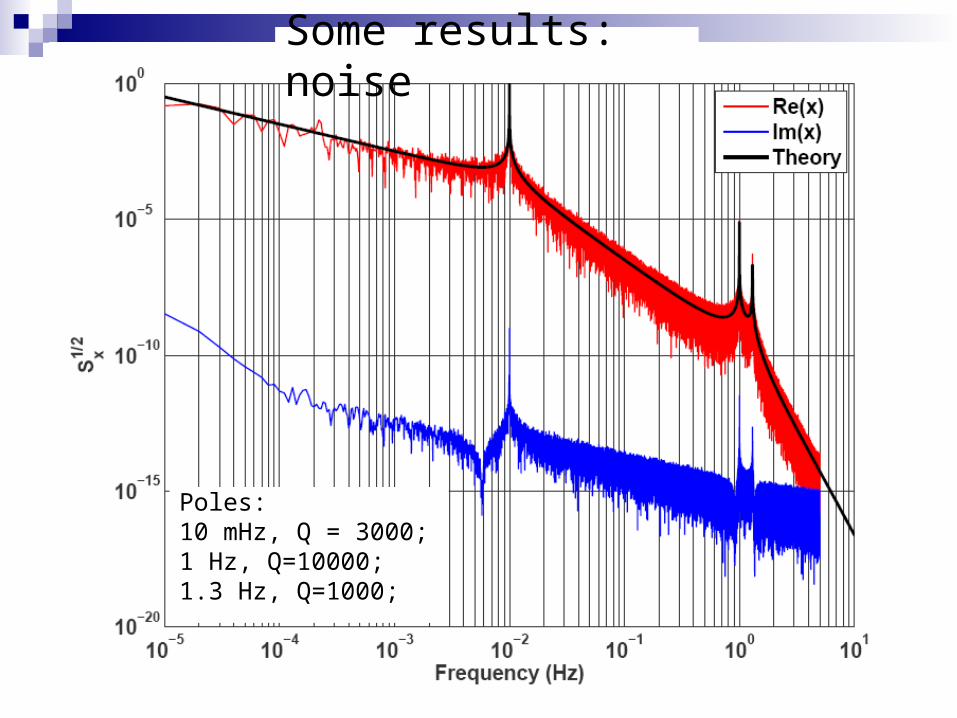
Some results: noise
Poles: 10 mHz, Q = 3000; 1 Hz, Q=10000;1.3 Hz, Q=1000;
14
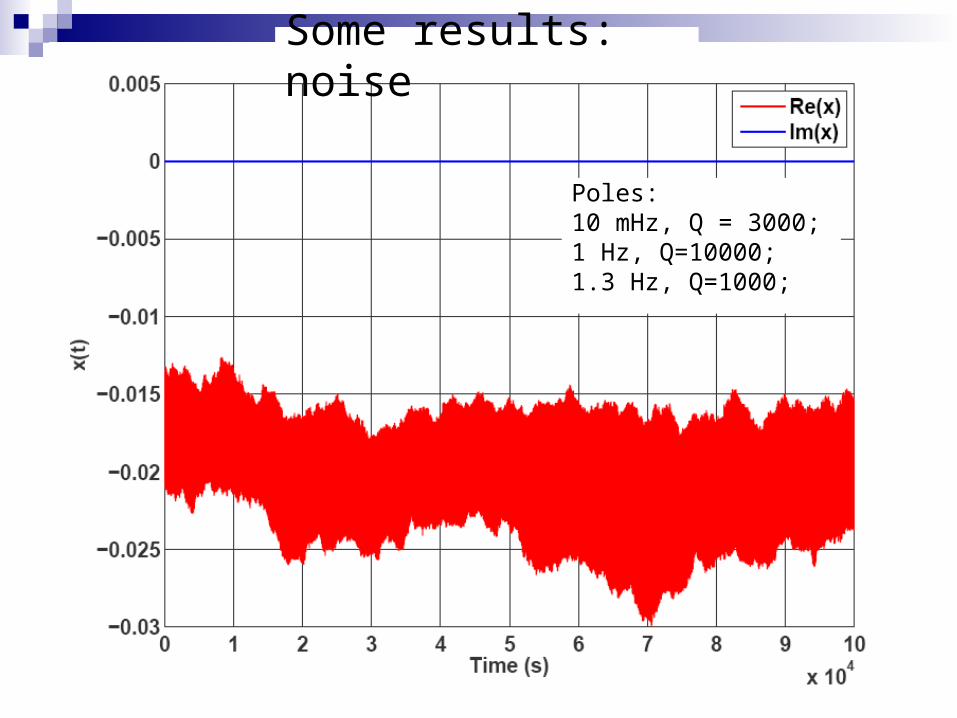
Some results: noise
Poles: 10 mHz, Q = 3000; 1 Hz, Q=10000;1.3 Hz, Q=1000;
15
What comes next:
Get the fitting features to work Compare with AEI noise generator Use it as the tools for system identification