Embed Size (px)
Citation preview

Remote Sensing of Environment 138 (2013) 172–188
Contents lists available at ScienceDirect
Remote Sensing of Environment
j ourna l homepage: www.e lsev ie r .com/ locate / rse
Using ERS spaceborne microwave soil moisture observations to predictgroundwater head in space and time
E.H. Sutanudjaja a,⁎, S.M. de Jong a, F.C. van Geer a,c, M.F.P. Bierkens a,b
a Department of Physical Geography, Faculty of Geosciences, Utrecht University, Utrecht, The Netherlandsb Unit Soil and Groundwater Systems, Deltares, Utrecht, The Netherlandsc Geological Survey of the Netherlands, TNO, Utrecht, The Netherlands
⁎ Corresponding author. Tel.: +31 30 25 32988; fax: +E-mail address: [email protected] (E.H. Sutanudj
0034-4257/$ – see front matter © 2013 Elsevier Inc. All rihttp://dx.doi.org/10.1016/j.rse.2013.07.022
a b s t r a c t
a r t i c l e i n f oArticle history:Received 30 May 2012Received in revised form 21 May 2013Accepted 6 July 2013Available online 17 August 2013
Keywords:Kalman filterRhine–Meuse basinSoil Water Index (SWI)Transfer function-noise (TFN) model
The study presented in this paper is to investigate the possibility of using spaceborne remote sensing data forgroundwater head prediction. Remotely-sensed soil moisture time series of SWI (Soil Water Index) derivedfrom ERS (European Remote Sensing) scatterometers are used to predict groundwater head dynamics in theRhine–Meuse basin, where over four thousand observed groundwater head time series are available. Ourstudy consists of three evolving research steps. First, the correlation between observed time series of groundwa-ter head and SWI is investigated. Second, SWI time series are used as input to a transfer-function noise (TFN)model for temporal prediction (forecasts) of groundwater heads. Third, TFN models with spatially interpolatedparameters are used with SWI time series for spatio-temporal prediction of groundwater heads. Here, HAND(Height Above Nearest Drainage) as derived from a digital elevation model is used as auxiliary information. Re-sults show that the correlation between SWI and groundwater head time series is apparent, particularly in areaswith shallow groundwater, and that correlation increases when a time-lag is taken into account. Temporal pre-dictions with TFN models reproduce observed groundwater head time series well at locations with shallowgroundwater, but results are poor for locations with deep groundwater. The spatio-temporal prediction methodis not able to estimate the absolute value of groundwater heads. However, head variation in terms of timing andamplitude is predicted reasonably well, in particular in areas with shallow groundwater. This suggests that, oncea groundwatermodel is suitably calibrated, remotely sensed soilmoisture data could be used to improve ground-water prediction in an operational data-assimilation framework.
© 2013 Elsevier Inc. All rights reserved.
1. Introduction
Groundwater is a vulnerable water resource that is consumed fasterthan it is naturally replenished inmany areas (Gleeson,Wada, Bierkens,& van Beek, 2012; Rodell, Velicogna, & Famiglietti, 2009; Wada et al.,2010). Due to climate change, population growth and an increasingdemand for fresh water, the pressure upon groundwater resourcesis expected to intensify in the future. These issues call for reliably mon-itoring and predicting groundwater changes over large areas. Yet, mostcurrent groundwater assessments heavily depend on ground-basedmeasurements of groundwater head that are often not available forlarge parts of the world and, if available, only as point-scale data thatare sparsely distributed. Hence, large-scale groundwater assessments,especially at the sub-continental scale, comprising of multiple aquifers,basins and countries, are still challenging.
Since the last decades, many studies have investigated the possibili-ties of earth observation for hydrological purposes and spaceborne
31 30 25 31145.aja).
ghts reserved.
remote sensing is increasingly used formapping andmonitoring hydro-logical states and fluxes, such as precipitation (e.g. Kummerow et al.,2000), soil moisture (Njoku, Jackson, Lakshmi, Chan, & Nghiem, 2003;Wagner, Lemoine, & Rott, 1999), snow cover (Immerzeel, Droogers, deJong, & Bierkens, 2009), land surface temperature (Wan & Li, 1997)and evaporation (Bastiaanssen, Menenti, Feddes, & Holtslag, 1998;Jung et al., 2010;Mu, Heinsch, Zhao, & Running, 2007; Su, 2002). The ad-vantage of remote sensing is its ability to provide spatially and tempo-rally exhaustive maps of surface properties. Most spaceborne remotesensing missions cover the entire globe so that their data products areglobally available. Thus, spaceborne remote sensing data can offer thespatial coverage and support that cannot be provided by sparsely dis-tributed point-scale ground-measured data. Nonetheless, the applica-tion of spaceborne remote sensing for groundwater hydrology is stilllimited (e.g. Alkhaier, Su, & Flerchinger, 2012; Becker, 2006). Up tonow, only the Gravity Recovery and Climate Experiment (GRACE,Tapley, Bettadpur, Ries, Thompson, & Watkins, 2004), a space gravitymission launched by the National Aeronautics and Space Administra-tion (NASA) since March 2002, has been recognized as groundwaterassessment tool, specifically for detecting groundwater storage dynam-ics (Rodell et al., 2007, 2009; Strassberg, Scanlon, & Chambers, 2009;

173E.H. Sutanudjaja et al. / Remote Sensing of Environment 138 (2013) 172–188
Swenson, Famiglietti, Basara, & Wahr, 2008). However, a major draw-back of GRACE is its coarse spatial resolution of 400 km, which makesit suitable for assessing large-scale groundwater storage dynamicsbut unsuitable for local to regional scale assessments. Recently, theEuropean Space Agency (ESA) launched the Gravity Field and Steady-state Ocean Circulation Explorer (Drinkwater, Floberghagen, Haagmans,Muzi, & Popescu, 2003; Drinkwater et al., 2007), which can deliver100 km resolution products. Yet, its application is still in its infancy(launched in March 2009). Therefore, the current known possibilitiesof spaceborne remote sensing for groundwater assessment are stilllimited.
Apart from gravity missions, other remote sensing applications re-main problematic for groundwater study for an obvious reason: currentsensors are unable to observe sufficiently deep into the earth to directlydetect groundwater dynamics. Despite this limitation, several scientistshypothesize that remote sensing should have tremendous potential forgroundwater studies. Jackson (2002) reviewed the possibility of usingmicrowave remote sensing for groundwater recharge estimates due toits capacity tomap surface soil moisture and tomonitor its temporal dy-namics (see also Jackson, 2006; Jackson, Schmugge, & Engman, 1996).Becker (2006) proposed that groundwater behavior can be inferredfrom remotely sensed surface expressions, such as elevation, land sur-face temperature, vegetation and soil moisture. Indeed, in a recent ap-plication, Alkhaier, Su, & Flerchinger (2012) showed that remotelysensed evaporation and land surface temperature correlate well withgroundwater depth and can be physically connected by means of asoil water and heat flux model (see also Alkhaier, Flerchinger, & Su,2012).
The objective of this paper is to investigate whether the spacebornesoil moisture time series of Soil Water Index (SWI) — derived byWagner, Lemoine, & Rott (1999) from European Remote Sensing(ERS) scatterometers — can be used as input in time series modelingto predict groundwater heads in space and time. We use a type oftime series model called the transfer function-noise (TFN) model to de-scribe the relationship between time series of SWI (input) and ground-water head (output). TFN models have been extensively used in thefield of groundwater hydrology. Examples are the decomposition ofhead time series into components corresponding to varying naturaland anthropogenic causes (Gehrels, van Geer, & de Vries, 1994; vanGeer & Defize, 1987), filling in gaps of head measurement time series(Bierkens, Knotters, & van Geer, 1999) and groundwater head fore-casting (Bierkens, Knotters, & Hoogland, 2001; Knotters & Bierkens,2000). However, in all of these applications, ground-measured precipi-tation (excess) time series were used as input (see also Berendrecht,Heemink, van Geer, & Gehrels, 2003).
In this paper, we explore the potential of using the remotely-sensedsoil moisture time series of SWI — having a better resolution (25–50 km) than the GRACE product — as the input of TFN models in threeevolving steps:
1. Correlation analysis.2. Groundwater head forecasting in time.3. Spatio-temporal groundwater head prediction.
In the first step, we explore the potential of SWI-driven TFN modelsto predict groundwater heads by analyzing the correlation between thetime series of SWI and groundwater head observations. In the secondstep, we use TFNmodels (driven by SWI) for temporal prediction (fore-casts) of groundwater heads. Here, the TFN model parameters are cali-brated and validated based on observed groundwater head time seriesusing a split-sample approach. In the third and final step, focusing onspatio-temporal prediction, we assume that the groundwater table re-flects the surface relief (Hubbert, 1940; Tóth, 1962) and use an elevationattribute calledHAND (Rennó et al., 2008):HeightAboveNearest Drain-age to spatially-interpolate the TFNmodel parameters to unvisited loca-tions, at locations not supported by groundwater head measurements.
We subsequently use these regionalized models for spatio-temporalhead prediction and validate it with head observations.
The paper is organized as follows. The following Section 2 describesthe study area and data. Subsequently, the theory and methodology ofeach research step are described in Section 3. Next, results are presentedand analyzed in Section 4. Finally, we concludewith discussion and con-clusions in Section 5.
2. Study area and data
2.1. Study area: The Rhine–Meuse river basin
Given the still limited resolution of SWI, this studywas performed ina large-basin scale setting, i.e. the combined Rhine–Meuse basin (Fig. 1,total area: ±200000 km2). It is a well documented basin situated inthe humid temperate zone of Western Europe, having areas of deepand shallow groundwater and supported by a good coverage of SWIand in-situ groundwater head data. The Rhine and Meuse rivers flowthrough Austria, Switzerland, Luxembourg, France, Germany, Belgiumand the Netherlands. We excluded the downstream areas in the Dutchlowland because in these areas water tables are strongly-controlled bywater management practices, specifically we excluded the areas down-stream of Lobith (Rhine) and about 150 km downstream of Borgharen(Meuse).
The topography is illustrated in Fig. 1a, based on the digital eleva-tion map of HydroSHEDS (Lehner, Verdin, & Jarvis, 2008). Fig. 1b givesthe approximate time-average depth to groundwater estimated withthe model of Sutanudjaja, van Beek, de Jong, van Geer, & Bierkens(2011), while Fig. 1c illustrates the hydro-geological classificationbased on the lithological map of Dürr, Meybeck, & Dürr (2005). InFig. 1b, shallow groundwater areas are indicated in blue. They comprisethe Dutch and Flemish lowlands (lying in the north-western part ofthe study area) and the Upper Rhine Graben (straddling the border be-tween France and Germany). These shallow groundwater areas arecharacterized by non-consolidated sediments (see Fig. 1) that are alsofound in small-scale aquifer structures near major tributary rivers (seeFig. 1f), i.e. the Aare, Neckar, Main, Moselle, Lahn, Ruhr and Lippe rivers(Rhine basin), and the Sambre and Ourthe rivers (Meuse).
2.2. Soil Water Index
Fig. 1e and f show two snapshots of SWI fields taken in August1995 and January 2005. According to Wagner, Lemoine, & Rott (1999),the values of SWI [−] represent the profile soil moisture content inthe first meter of the soil in terms of saturation degree between 0%and 100% — respectively representing wilting point and field capacityconditions. SWI time series are derived based on SSM [−] (SurfaceSoil Moisture) time series measured by European Remote Sensing(ERS) scatterometers. The scatterometers retrieve SSM about 3 to 4times per week, which represents soil moisture content in the top soillayer (b5 cm, as discussed by Wagner, Lemoine, & Rott, 1999). The re-trieval algorithm of SSM is based on a change detection approach ofbackscatter measured by active scatterometers accounting mainly forsoil moisture and vegetation phenology (Wagner, Lemoine, & Rott,1999; Wagner, Naeimi, Scipal, de Jeu, & Martnez-Fernndez, 2007). Thebackscatter measurements are corrected for the effects of vegetationphenology (Wagner, Lemoine, Borgeaud, & Rott, 1999) and the time se-ries of SSM are retrieved by relating the vegetation-corrected backscat-ter time series to the dry and wet reference values (determined byselecting their lowest and highest values within a 10-year period). Thefollowing exponential low-pass filter is applied to SSM time series inorder to derive SWI time series (Wagner, Lemoine, & Rott, 1999):
SWIdSWI¼
XSSMdSSM
� e− dSWI−dSWIð Þ=TX
e− dSWI−dSWIð Þ=T for dSSM≤dSWI ð1Þ

a b c
d e f
Fig. 1. The study area in the Rhine–Meuse basin: (a) the 30 arc-second digital elevationmap DEM of HydroSHEDS (Lehner et al., 2008); (b) the 30 arc-second groundwater depth average(1974–2008) based on themodel of Sutanudjaja et al. (2011); (c) the lithological map of (Dürr et al., 2005) that has been corrected based on (a) and (b); (d) the locations of groundwaterhead stations used in this study and their averagemeasured depths in each half arc-degree pixel; and (e) and (f) two fields of ERS SWI in August 1995 and January 2005. There are manymissing data in Fig. 2f due to snow cover or frozen soils during thewinter. Fig. 2e includes the codes of half arc-degree (30 arc-minute) pixels. Fig. 1f includes points a, b, c and d indicatingthe locations of the time series shown in Figs. 3, 4, 7, 8 and 13.
174 E.H. Sutanudjaja et al. / Remote Sensing of Environment 138 (2013) 172–188
where dSWI and dSSM are the (daily) time indexes of SWI and SSM, andT [T] is the characteristic time length, taken as 20 days because it pro-vided the best correlation to the field data (see also Wagner, 1998).
Both SSM and SWI fields are available since 1 August 1991 until 31May 2007. There are unfortunately missing data in the period 1 January2001 to 12 August 2003 due to satellite problems (Wagner et al., 2003).Due to snow cover or frozen soil, there are also often missing data dur-ing winter periods (as an example, see Fig. 1f). In their original format,SWI fields have about 25–50 km spatial and 10-day temporal resolu-tion. In this study, to reduce the number of missing values, the SWIdata were resampled to a monthly and half arc-degree (approximately50 km at the equator) resolution.
2.3. Groundwater head data
Fig. 1d illustrates the locations of more than four thousands (point-scale) groundwater head measurement stations used in this study.The data used had to satisfy the following criteria. First, the time serieshad to be relatively recent (after 1992) and considered as long records(at least five years) containing seasonal variation (i.e. in all five years,there is at least one measurement for each season: winter, spring,
summer and autumn). Moreover, we only selected the time series be-longing to the uppermost aquifer, where correlation between remotelysensed soil moisture SWI and groundwater head time series wasexpected. The original time-intervals between head observations variedamong stations: from daily, monthly to quarterly observations. In thisstudy, all groundwater time series were resampled to monthly resolu-tion such that they were consistent to the resolution of SWI used.
3. Methodology
3.1. Correlation analysis
As afirst step,we investigatedwhether the SoilWater Index time se-ries, symbolized as SWIt [−], correlates to groundwater head time se-ries, ht [L]. Throughout this paper, the index t is used as a monthlytime series index and h level (unit: m) is taken with respect to surfaceelevation and given a negative sign if it is below surface (i.e. h may bedefined as “groundwater depth”). For each groundwater station,we cal-culated the cross correlation function CCF between the time series of htand corresponding SWIt and identified the zero-lag cross correlation co-efficient, ρlag = 0 [−], the highest cross correlation coefficient, ρbest [−],

175E.H. Sutanudjaja et al. / Remote Sensing of Environment 138 (2013) 172–188
and its corresponding delay time, lagbest [T] (unit: month). Note that adelay time lagbest, indicating a forward shift of SWIt time series, maybe expected due to the response time between the water in upper soillayers and groundwater compartments. Scipal, Scheffler, & Wagner(2005) used a similar delay time approach while studying the relationbetween catchment scale SWI andmeasured river discharge time series.
We performed the same analysis to time series of monthly anoma-lies, i.e. by beforehand removing the seasonal cycles of SWIt and ht.We first computed the monthly climatology of both time series by cal-culating 12 average monthly values (January to December) from allyears for which data were available. Next, by substracting these clima-tology means, we computed the monthly anomaly time series of SWItand ht. We then calculated its zero-lag cross correlation coefficient,ρma0 [−], and the cross correlation coefficientρmab [−],whichwas com-puted by considering lagbest as the time delay.
To ensure that sufficient data pairs were used, we only analyzedhead time series containing at least 50 months duringwhich SWI valueswere also available. Due to the spatial support discrepancy betweenthe point-scale head and half arc-degree SWI data, the analysis wasperformed in two ways:
1. Direct comparison of point-scale ht to SWIt time series. This type ofanalysis implies that results, without upscaling of head data andwithout downscaling of remote sensing data, are conservative as er-rors also include unresolved spatial variationwithin a half arc-degreepixel.
2. Comparison at half arc-degree pixel scale: Here we beforehandupscaled (averaged) the point-scale ht to half arc-degree resolution.The upscalingwas only done for the half arc-degree pixels containinga minimum of 15 groundwater head measurement stations.
3.2. Groundwater head forecasting in time
This section shortly describes themodeling framework used tomakegroundwater head forecasts in time. Section 3.2.1 describes the generalform of a transfer function-noise (TFN) model. Section 3.2.2 briefly ex-plains themethod to calibrate themodel parameters based on the com-bination of the Kalman filter algorithm and a maximum likelihoodcriterion. Section 3.2.3 explains the validation procedure performed toassess the forecasting skill.
3.2.1. Transfer function-noise (TFN) modelDriven by SWIt as input series, a TFNmodel describing groundwater
head dynamics ht is given by the following set of equations:
ht ¼ h�t þ nt ð2Þ
h�t ¼Xr
i¼1
δih�t−i þ
Xs
j¼0
ω jSWIt− j−b ð3Þ
nt−cð Þ ¼Xpk¼1
ϕk nt−k−cð Þ þ at þXql¼1
θlat−l ð4Þ
where ht∗ [L] is the component of the head ht at time step t attributable toSWI and nt is the noise component at time step t. δi [−] is theautoregressive parameter of lag i of a transfer model up to order r andωj [L] is the moving average parameter of lag j of a transfer model upto order s, while b [T] is the (monthly) index difference or delay be-tween input and output. c [L] is the reference level or the expectedvalue of nt and at [L] is a realization of a zero mean white noise processwith varianceσa
2 [L2].ϕk [−] is the autoregressive parameter of lag k of anoisemodel up to order p and θl [−] is themoving average parameter oflag l of a noise model up to order q.
Detailed description of TFN models is available in Box & Jenkins(1976). This study uses a simple model with r = 1, s = 0, p = 1,q = 0 and b = 0.
3.2.2. Model calibrationThe simple TFNmodel can bewritten in the following state andmea-
surement equations of the Kalman filter using a vector notation:
h�tnt−c
� �¼ δ1 0
0 ϕ1
� �h�t−1
nt−1−c
� �þ ω0
0
� �SWIt þ 0
1
� �at ð5Þ
yt ¼ 1 1½ � h�tnt−c
� �þ cþ �t ð6Þ
where yt [L] (unit: m) is a head measurement available at time t and �t[L] (unit: m) is introduced as a zero mean (measurement) white noisewith variance σ�
2 [L2] (unit: m2). The state Eq. (10) consists of ht∗ (unit:m) describing the deterministic component related to the input series,i.e. SWIt (in fraction), and (nt − c) (unit: m) providing the stochasticcomponent independent of the input. Themeasurement Eq. (12) relatesthe state, i.e. ht∗ and (nt − c), to the measurement yt. The parameters inEqs. (10) and (12) can be estimated using the Kalman filter applicationdescribed in Berendrecht et al. (2003) and briefly summarized as fol-lows (see also Bierkens et al., 1999).
Using the following variables:
xt ¼ h�tnt−c
� �;A ¼ δ1 0
0 ϕ1
� �;B ¼ ω0
0
� �;C ¼ 1 1½ �;D ¼ 0
1
� �;
the state and measurement equations are written in the general form:
xt ¼ Axt−1 þ BSWIt þ Dat ð7Þ
yt ¼ Cxt þ cþ �t : ð8Þ
The parameters δ1 andϕ1 (both are dimensionless and defined inA),ω0 (unit:m, defined inB), c (unit:m) and the varianceσa
2 (unit:m2) canbe estimated by optimizing a likelihood function for the innovations ofthe Kalman filter (see Berendrecht et al., 2003). Optimizing this likeli-hood is equivalent to minimizing squared differences between Kalmanfilter predictions (time updates) and observations in case the modeland measurement noise are Gaussian. Optimization is achieved by se-quential quadratic programming (see Gill, Murray, & Wright, 1981).Here we follow the common assumption in groundwater head timeseries analysis that the variance of the measurement noise is small(σ�
2 ≈ 0). The assumption is warranted because in most cases ground-water levels can be observed with standard errors smaller than0.01 m, while model errors are an order of magnitude larger (seee.g. van Geer, 1987; van Geer & Defize, 1987; van Geer & te Stroet,1990; van Geer, te Stroet, & Yangxiao, 1991). The time step used inthe Kalman filter time update (prediction) is one month. For themodel parameter calibration, we used the period 1995–2000 and usedall available groundwater observations to obtain head measurementupdates.
3.2.3. Model validation and forecasting evaluationFor the validation, we ran the model for the period 2004–2007 and
used several measurement update intervals:
1. Using all available head data formeasurement updates (everymonth).2. Measurement update interval is 3 months.3. Measurement update interval is 4 months.4. Without any measurement updates.
In experiments 1 to 3, the intention was to evaluate the forecastingskill of the derived TFNmodel for varying head observation frequenciesapplied in the real world. For the last experiment 4 (without measure-ment updates), the focus was on the evaluation of the calibrated

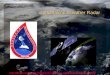
Fig. 2. Illustration of the definition of HAND (Height Above Nearest Drainage, Rennó et al.,2008): a relative topography height above the nearest surface water bodies or streamnetworks. Also illustrated are the conventions used throughout the paper, in whichgroundwater head levels (indicated as a dashed bold line) are considered with respectto surface elevation (continuous bold line) and given a negative sign if below surface. Inthe figure, havg is the average groundwater head level and c is the drainage level (finedashed line).
176 E.H. Sutanudjaja et al. / Remote Sensing of Environment 138 (2013) 172–188
parameters c, δ1 andω0. For cases 1–4, using availablemeasurements inthe validation period 2004–2007,we calculated the cross correlation co-efficients ρTF [−] (without considering any lag) between measuredhead data and predicted head time updates in order to evaluate timingagreements between observed and predicted head time series. Also, themean error ME [L] (unit: m), as a measure of bias of predicted time up-dates, and the mean absolute error MAE [L] (unit: m), as a measure ofaccuracy, were calculated.
All TFN model parameters are expected to be constant in time, in-cluding the level c. However, if the level c, estimated in the calibrationperiod 1995–2000, physically changed in the validation period 2004–2007 (e.g. due to land subsidence or human intervention), large MEand eventually large MAE are expected, especially for the runs withoutmeasurement updates (point 4). Hence, we also calculated MAEano [L](unit: m), which is the mean absolute error computed by beforehandremoving the bias between the predicted and measured time series.MAEano is an unbiased measure of accuracy (i.e. precision), withoutthe influence of the estimated level c.
To ensure that the model calibration and validation were supportedby enough data, the forecastingwas performed only for head time seriesthat contain at least 40 months in 1995–2000 and 20 months in 2004–2007. In both periods, there were only few missing values of SWI thatwere filled by linear interpolation. As with the correlation analysis, theforecasting was done at both point scale (without aggregating headdata) and pixel scale (by beforehand aggregating point-scale headdata to half arc-degree resolution).
3.3. Spatio-temporal groundwater head predictions
In the third and final exercise, we focused on spatio-temporal pre-diction of groundwater head by using a space-time version of transferfunctionmodels driven by SWI as input series.We constructed a simplespatio-temporal transfer function model (i.e. using Eqs. (2) to (4) withorders r = 1, s = 0, p = 1, q = 0 and b = 0) and evaluated its predic-tive skill at “non-visited locations” — where groundwater head datawere assumed not to exist — and transfer function model parameterswere estimated using a digital elevation model. Such space-time orregionalized transfer-function noise models were previously used inhead prediction (Bierkens et al., 2001; Knotters & Bierkens, 2001), albeitin small areas and with precipitation excess as input.
3.3.1. Parameter estimationThe spatio-temporal TFN models developed in this paper operate at
monthly resolution and have a spatial resolution of 30″ × 30″ (approx-imately equal to 1 km × 1 kmat the equator),which is the resolution ofthe digital elevationmodel that we used for derivingmodel parameters.Constructing these spatio-temporal models involved the followingsteps.
We selected a limited number of stations with good validation re-sults of the (point-scale) temporal forecasting exercise, i.e. those withprediction (without measurement updates) having MAEano less than10 cm and ρTF larger than 0.7. Subsequently, for each 30 arc-minutepixel containing the selected stations, we identifiedmaximum three lo-cations with the highest values of ρTF (of the validation runs withoutmeasurement updates). In these selected stations, we identified the av-erage groundwater head levels, havg [L] (unit: m), and the calibrated pa-rameters c, δ1 and ω0.
To spatially interpolate themodel parameters (from the limited num-ber of stations), spatially-continuous auxiliary information is needed.This auxiliary information should preferably reflect the hydrologicalfunctioning of the terrain. Here, we used a measure called HeightAbove Nearest Drainage or HAND (Rennó et al., 2008) that has beenshown to be a dominant topographical control for hydrological classifi-cation of landscapes (see e.g. Gharari, Hrachowitz, Fenicia, & Savenije,2011; Savenije, 2010). HAND is inspired on the classic idea that thewater table follows the topography as a subdued replica (Hubbert,
1940; Tóth, 1962), as seen in Fig. 2. It follows that groundwater depthincreases with HAND. Similarly, from groundwater dynamics one canexpect the amplitude and characteristic response time of the ground-water table to increase with HAND as well (see also Knotters &Bierkens, 2000). HAND [L] (unit: m) — for each 30 arc-second pixel ofa digital elevation model DEM [L] (unit: m) — can be calculated asits relative height above the surface water bodies (see also Nobreet al., 2011). To calculate HAND, we used the digital elevation modelof HydroSHEDS (Lehner et al., 2008), which is a global dataset suchthat the approach is portable to other areas. We used the 30 arc-second river network map of HydroSHEDS together with the GlobalLakes and Wetland Database (GLWD, Lehner & Döll, 2004) to identifythe locations of rivers, lakes, wetlands and other surface water bodies.Based on the digital elevation and local drainage maps of HydroSHEDS,HAND was calculated as:
HAND ¼ DEM30″−DEMwat ð9Þ
where the subscript 30″ indicates the spatial resolution and DEMwat [L](unit:m) is the assumed elevation of the nearest surfacewater pixel. Tocalculate DEMwat, we applied a 3 × 3 window neighborhood movingaverage to 3 arc-second HydroSHEDS digital elevation map and thenassigned the resulting minimum value to the center of every 30 arc-second pixel. This filter was implemented to eliminate artifacts foundin the original elevation map, but still preserving important surfacewater course elevations.
The reference level c was estimated based on the conceptualiza-tion in Fig. 2. For zero input values (SWIt = 0) — i.e. a prolonged con-dition of dry soil (no groundwater recharge) — Eqs. (2) to (4) suggestthat groundwater head would decline to a level equals to c. This levelc is most likely the level of the nearest drainage level (see e.g. vonAsmuth, Bierkens, & Maas, 2002; von Asmuth & Knotters, 2004). Refer-ring to the conceptualization in Fig. 2, the level cwas approximated by:
c ¼ −HAND ð10Þ
where the negative sign indicates a position below surface elevation.When estimating the remaining parameters δ1 and ω0, we tried to
use relationships that are hydrologically consistent, but also internallyconsistent in that they result in a stationary TFN model. To estimateδ1, we used the following regression model:
δ1 ¼ e−C� 1=HANDD� �
ð11Þ
where the regression coefficients are positive (C N 0 and D N 0) suchthat 0 ≤ δ1 ≤ 1, as it should be from the physical point of view. Theexponential function in Eq. (11) is similar to the one proposed by(Knotters & Bierkens, 2000) in their ARX model, i.e. a form of TFNmodel with ϕ1 equal to δ1 and estimated as δ1 = e−Δt/fγ where Δt [T]is the time step, γ [T] is the resistance of groundwater flow to the

177E.H. Sutanudjaja et al. / Remote Sensing of Environment 138 (2013) 172–188
drainage and f [−] is the porosity. Fromdrainage theory (Ernst, 1956), itfollows that if the variation of f is assumed to be small, γ increases withHAND, which suggests the relation in Eq. (11).
To estimate a value of ω0 that is consistent with the parametersδ1 and c, we used the steady state condition of the model. Here, themean of groundwater head state ht
∗ = ht − 1∗ = havg
∗ was obtained byforcing the TFN model with mean soil moisture SWIt = SWIavg. Thesteady state condition of the deterministic part of the TFN model(Eq. (3)) is then expressed as:
h�avg ¼ω0
1−δ1� SWIavg: ð12Þ
Since the expected value of the noise component nt is c (Eq. (4)), thesteady state condition of the TFN model (Eq. (2)) can be written as:
havg ¼ω0
1−δ1� SWIavg þ c: ð13Þ
Therefore, the value of ω0 is given as:
ω0 ¼havg−c
� �SWIavg
1−δ1ð Þ: ð14Þ
Following the conceptualization in Fig. 2, the positions havg above cwas estimated from the following power regression model:
havg−c� �
¼ A�HANDB ð15Þ
which, with the coefficients 0 b A ≤ 1 and 0 b B b 1, provides thatgroundwater levels are close to drainage levels (havg = c) for areas lo-cated near streams (HAND = 0) and groundwater levels are abovedrainage levels (havg N c) for areas located higher above the floodplain (HAND ≫ 0).
Finally, using the regressionmodels in Eqs. (11) and (9), the value ofω0 in Eq. (14) was estimated as:
ω0 ¼ A�HANDB
SWIavg1−e−C� 1=HANDD
� �� �: ð16Þ
Eq. (16) ensures thatω0 ≥ 0, as it should be from a physical point ofview (Knotters & Bierkens, 2000).
The relations suggested in Eqs. (10), (11) and (16) were used to es-timate c, δ1 andω0 for the entire study area by fitting parameters A, B, Cand D from relating calibrated TFN parameters at the selected head ob-servation locations to the local value of HAND. Using the estimates ofthese deterministic parameters, we performed spatio-temporal predic-tions of monthly groundwater heads (based on Eqs. (2) to (4)) for theperiods 1995–2000 and 2004–2007. As the initial condition, we usedthe estimate of havg based on Eqs. (10) and (9):
havg ¼ − HAND−A�HANDBh i
: ð17Þ
Note that the estimation of the noise series (i.e. Eq. (4), includingthe parameter ϕ1 and the variance σa
2) was not pursued here due tothe assumption that no groundwater head data were available to esti-mate at series.
3.3.2. Model evaluationThe predicted head time series, which have a spatial resolution of 30
arc-seconds, were evaluated by point-scale groundwater head mea-surements. We ignored the spatial scale discrepancy between them.For the period 1995–2000, the prediction was evaluated only at thestations having at least 40 months of observation data, while the
evaluation of the prediction in 2004–2007was done only at the stationswith at least 20 months of observations. For both periods, similar to theevaluation of temporal forecasting (Section 3.2.3), we calculated thecross correlation coefficient ρTF, the bias ME, the mean absolute errorMAE between the predicted and measured time series, and the meanabsolute error MAEano between two anomaly time series.
4. Results
4.1. Correlation analysis
Fig. 3a to d provide examples of graphical comparisons between theSWIt and point-scale ht time series at four different locations indicatedin Fig. 1f. For each graph, the values of ρlag = 0, ρbest and the timedelay lagbest are given in the yellow box on the left. These examplesshow that at the locations with shallow groundwater head (Fig. 3a toc), soil moisture and groundwater head dynamics are correlated andreact to the same seasonal hydrologic pattern. Fig. 3a shows good corre-lation (ρTF N 0.7) without any time lag, while Fig 3b and c show goodcorrelation when a time lag is included. Fig. 3d provides an examplewith deep groundwater level, which shows no correlations betweenSWIt and ht. The head time series at this location lack the seasonal pat-tern as seen in the soil moisture time series.
Fig. 4 is similar to Fig. 3 except that monthly anomaly time series ofSWIt and ht are plotted (after removing the seasonal variations of SWItand ht). The text boxes contain the values of ρma0, the zero-lag cross cor-relation coefficients, and ρmab, the cross correlation coefficients calculat-ed with considering lagbest as the time delay. The black dashed linesindicate ±standard deviation intervals (also denoted in the figures).Using such intervals, years can be identified with wet or dry anomaliesas indicated by observations above or below standard deviation intervallines. For the shallower groundwater levels (Fig. 4a to c), these anomalytime series are generally consistent and thus suggest a coupling be-tween soil moisture and groundwater head inter-annual variation. Asan example, both time series of SWI andhead in Fig. 4a and c consistent-ly suggest a dry episode in 1996 (also reported by de Wit et al., 2007;Wada et al., 2011). As expected, this is not observed for the deepergroundwater table (Fig. 4d). Here, the groundwater head provides sim-ilar multi-year anomalies, but delayed and smoothed.
The values of ρlag = 0, ρbest, ρma0 and ρmab, for all groundwater headstations, are summarized in the histograms in Fig. 5. The histogramsshow that most of the groundwater head time series correlate wellwith SWI time series. Without time lags, Fig. 5a and c shows thatthere are 2285 (47%) groundwater head stations having ρlag = 0 ≥ 0.5and 1804 (39%) stations with ρma0 ≥ 0.5. Fig. 5b and d shows that tak-ing time lags into account improves the correlation, with 2835 (62%)groundwater head stations with correlation ρbest ≥ 0.50 and 1957(43%) stations with anomaly correlation ρmab ≥ 0.5.
Fig. 6a, b and c presents the spatial maps of ρlag = 0, ρbest and lagbest,respectively. The values in each map are the average of point-scalevalues within the 30 arc-minute pixels that have at least 15 head mea-surement stations (note that because there are generally more stationsin areas with shallow groundwater tables, these areas are slightly over-represented in Fig. 6 and all similar figures in the paper). Comparing themaps in Fig. 6a and b to average groundwater depthmaps in Fig. 1b andd suggests that the correlations are highest in areas with shallowgroundwater tables (e.g. the lowland areas in the Netherlands andBelgium). The correlation in areas with deeper groundwater head be-comes apparent if lag time is considered (Fig. 6b). Longer lag times arefound for areas with deeper groundwater tables. To confirm this, wetested the correlation between the 30 arc-minute pixel-scale values ofρlag = 0 (Fig. 6a), ρbest (Fig. 6b) and lagbest (Fig. 6c) and the averagemea-sured groundwater head (Fig. 1d). Three different statistics were com-puted: Pearson's product-moment, Spearman's rho rank and Kendall'stau rank correlations. The results and the associated p-values arepresented in the yellow boxes of Fig. 6. As expected, we found a positive

a
b
c
d
e
Fig. 3. Comparisons between ERS SWIt (red lines) and groundwater head ht time series (blue dots) at several locations: Lennisheuvel, the Netherlands (a); Herkenbosch, the Netherlands(b); Falmignoul, Belgium (c); andGroot-Genhout, Beek, the Netherlands (d) (see Fig. 1f for the location of each point). The lowermost one (e) is the comparison between the time series ofSWIt and the upscaled ht at the pixel 21 (see Fig. 1e for the pixel location).
178 E.H. Sutanudjaja et al. / Remote Sensing of Environment 138 (2013) 172–188
correlation between ρlag = 0 and ρbest values to average groundwaterdepth. It thus confirms that SWIt signals have stronger correlations toht time series in shallower groundwater areas. The tests yield a negativecorrelation between lagbest and average groundwater depth, suggesting
a
b
c
d
e
Fig. 4. Comparisons between monthly anomaly time series of ERS SWIt (red lines) and grounNetherlands (b); Falmignoul, Belgium (c); and Groot-Genhout, Beek, the Netherlands (d) (seethe monthly anomaly time series of SWIt and the upscaled ht at the pixel 21 (see Fig. 1e for thmonthly anomaly time series around the mean of zero.
that longer delays between head and soil moisture time series areexpected in areas with deeper groundwater.
Table 1 provides the correlation analysis in which we beforehandupscaled groundwater head time series to 30 arc-minute pixel scale.
dwater head ht at several locations: Lennisheuvel, the Netherlands (a); Herkenbosch, theFig. 1f for the location of each point). The lowermost one (e) is the comparison betweene pixel location). The dashed line in each chart indicates the standard deviations of both

a b c d
Fig. 5.Histograms of correlations between SWIt and ht time series: zero-lag cross correlation coefficient, ρlag = 0 (a), and the highest value of the cross correlation function, ρbest, with timedelay lagbest (b). Also, we computed cross correlation coefficients between twomonthly anomaly time series (i.e. by beforehand subtracting their seasonalmeans, see Section 3.1):withoutconsidering delay, ρma0 (c), and with considering lagbest as the time delay, ρmab (d). The total number of stations used in this correlation analysis is 4586.
179E.H. Sutanudjaja et al. / Remote Sensing of Environment 138 (2013) 172–188
An example of the comparison between the SWIt and the upscaledht time series is given in Figs. 3e and 4e. This example is for a 30 arc-minute pixel with shallow groundwater showing good correlation be-tween the time series of SWI and pixel-average groundwater head.From Table 1 — sorted according to average (upscaled) groundwaterdepth—we find a tendency of areas with shallower water table depthsto have higher correlations between SWIt and upscaled ht time series(measured in ρlag = 0, ρbest, ρma0 and ρmab) and areas with deepergroundwater tables to have longer delay (lagbest). The lower part ofTable 1 contains the correlation test results confirming this.
4.2. Groundwater head forecasting in time
Fig. 7a to d presents comparisons between point-scale measuredand predicted time series calculated from the TFN model at the same
ττ
$
a b
Fig. 6. The 30 arc-minute pixel averages of the zero-lag cross correlation coefficients, ρlag = 0 (a(c). We show only the pixel average values calculated from at least 15 point-scale values. Theheads (Fig. 1d): Pearson's correlation (rp), Spearman's rho (rs) and Kendall's tau (τk) coefficien
four locations as used in the correlation analysis. In each figure, theprediction performance, indicated in ρTF, ME and MAE (evaluatedfrom the measurements in the period 2004–2007), is given in the yel-low box on the left side, while the calibrated parameters (c, ω0, δ1, ϕ1
and σa) are shown on the right side. Three predicted time series withvaryingmeasurement update intervals (1, 3 and 4 months) are plotted.In the next paragraphs as well as the remaining part of the paper weuse the terms “good” (ρTF N 0.7, MAE b 0.5), “reasonable” (ρTF N 0.5,MAE b 0.5) and “poor” (ρTF b 0.5, MAE N 0.5). These qualifications arepartly subjective, but can be compared to results in other paperswhere, albeit at a smaller scale, groundwater levels were predicted(see e.g. Bierkens & te Stroet, 2007; Bierkens et al., 2001).
Fig. 7 shows that the TFNmodel is able to predict the observed headtime series, not only for shallowgroundwater locations (Fig. 7a to c), butalso for the location with deep groundwater (Fig. 7d). Once the TFN
τ τ
$ $
c
), the highest cross correlation coefficients, ρbest (b), and their corresponding delay, lagbestyellow boxes contain the correlation coefficients of the field values to average measuredts.

Table 1Results of the correlation analysis between SWIt and 30 arc-minute scale groundwater head ht time series. The table is ordered according to average measured head havg.
Pixel codes Number of stations havg(m)
ρlag = 0 lagbest(month)
ρbest ρma0 ρmab
21 671 −1.47 0.73 0 0.73 0.54 0.5438 336 −1.93 0.74 1 0.79 0.71 0.6923 159 −2.30 0.56 2 0.71 0.55 0.6139 851 −2.65 0.61 0 0.61 0.44 0.4422 500 −2.85 0.71 0 0.71 0.64 0.64145 39 −3.15 0.51 0 0.51 0.57 0.57129 15 −3.47 0.29 1 0.40 0.39 0.46144 33 −3.55 0.51 0 0.51 0.60 0.60128 41 −3.77 0.49 1 0.52 0.51 0.4740 312 −4.02 0.57 1 0.62 0.60 0.62112 187 −4.15 0.24 2 0.43 0.31 0.3295 142 −4.39 0.16 4 0.48 0.36 0.3892 19 −5.82 0.40 2 0.51 0.43 0.45162 25 −8.28 0.04 7 0.35 0.29 0.1982 18 −8.40 −0.30 4 0.03 −0.26 −0.30100 20 −8.58 −0.26 5 0.14 −0.13 −0.0680 29 −9.26 −0.32 6 −0.14 −0.33 −0.2057 20 −9.52 0.04 2 0.04 0.02 −0.0377 27 −9.72 0.42 2 0.59 0.56 0.55118 132 −9.90 −0.15 0 −0.15 −0.11 −0.11161 50 −9.98 0.30 2 0.40 0.34 0.4476 24 −10.62 0.38 2 0.48 0.43 0.4175 21 −12.43 0.41 1 0.53 0.38 0.4756 307 −13.02 0.10 1 0.18 0.12 0.1297 42 −13.03 0.28 4 0.45 0.36 0.29117 262 −13.57 0.03 1 0.03 −0.04 0.00181 19 −14.64 0.04 6 0.12 0.15 −0.01101 24 −18.75 0.02 4 0.08 0.06 0.06102 19 −21.93 −0.22 6 −0.19 −0.23 −0.22164 20 −22.93 0.00 8 0.38 0.04 0.2890 22 −26.70 0.14 9 0.18 0.19 0.18Correlations to havgPearson's correlation coefficients rp 0.58 −0.71 0.60 0.58 0.55
p-value ≤0.001 ≤0.001 ≤0.001 ≤0.001 0.001Spearman's rho coefficients rs 0.69 −0.61 0.69 0.67 0.65
p-value ≤0.001 ≤0.001 ≤0.001 ≤0.001 ≤0.001Kendall's tau coefficients τk 0.52 −0.48 0.52 0.47 0.46
p-value ≤0.001 ≤0.001 ≤0.001 ≤0.001 ≤0.001
180 E.H. Sutanudjaja et al. / Remote Sensing of Environment 138 (2013) 172–188
model is calibrated, it can also be used to perform temporal predictionin case no head observations are used for updating. In this case, perfor-mance entirely relies on the relation between groundwater head andSWI as investigated in Section 4.1. Examples are shown in Fig. 8a to d.The prediction (red lines) is presented together with the 95%prediction interval (black lines) estimated from the noise component
(i.e. �1:96ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiσa=1−ϕ2
1
q). These results show that good predictive skill
is achieved for locations with shallow groundwater (Fig. 8a to c). Yet,Fig. 8d shows that for a location with deep groundwater, the predictionperforms poorly. In this case, due to lack of a physical relationship be-tween groundwater head and SWI, the parameters identified do not re-flect the true system mechanics, resulting in poor predictions. To bemore specific, the value ofω0— determining the strength of the relation-ship between head and input series (see Eq. (3)), for the deep groundwa-ter case in Fig. 7d, (and Fig. 8d) is very small (ω0 ≈ m). This indicates thatfor this deep groundwater location, the influence of soil moisture ongroundwater head is hardly existent. It is thus clear that the good predic-tion in Fig. 7d is mainly due to the large inertia of the deep groundwatersystem which allows for an accurate prediction using a simple auto-regressive model with regular measurement updates. At the same time,the wrong model structure does not allow for an accurate estimate ofthe parameter c, with a large bias (ME) as a result.
Fig. 9 presents the histograms summarizing the performance indica-tors ρTF, ME and MAE of the predictions with three-month (Fig. 9a to c)and four-month (Fig. 9d to f) measurement updates. Histograms for thecase without measurement updates are given in Fig. 10. All of these
results are based on the validation run2004–2007. As expected, the pre-diction performance generally decreases if longer measurement updateintervals are used. However, the case without measurement updatesstill provides good results in terms of reproduction of the dynamics(Fig. 10a) with 1730 (63%) locations with ρTF N 0.5 and 974 (35%)locations with ρTF N 0.7. Yet, Fig. 10b shows that there are severallocations with large biases, as suggested in the histogram with 659(24%) locations with ME N 0.5 m. These biases, which are most likelyattributable to the inability to estimate c in case of a lack of relationshipbetween groundwater and soil moisture (see the previous discussion),also affect the prediction accuracymeasured inMAE, as shown in its his-togram in Fig. 10c (with 766 (24%) locations with MAE N 0.5 m). Hav-ing corrected these biases, the prediction accuracy increases, asindicated in the histogram of MAEano in Fig. 10d (with only 303 (11%)locations with MAEano N 0.5 m). A spatial map of performance is pro-vided in Fig. 11 in the form of 30 arc-minute fields of ρTF, ME , MAEand MAEano. The similarity of ME (Fig. 11b) and MAE (Fig. 11c)shows that the latter ismainly attributable to prediction bias. This is fur-ther corroborated by the small MAEano (Fig. 11d) that remains after biascorrection.
Table 2 lists the results of the forecasting at the 30 arc-minute pixelscale (at which we beforehand upscaled point-scale head time series to30 arc-minute pixel). An example of comparing the predicted andmeasured time series of the upscaled ht is given in Fig. 7e for the predic-tionwithmeasurement update, and in Fig. 8e for the predictionwithoutmeasurement update. The results of the 30 arc-minute scale predictionare consistent with the results found in the point scale prediction.

% ' '(
a
b
c
d
e
Fig. 7. Comparisons between the time update predicted andmeasured groundwater head time series (blue dots) at several locations: Lennisheuvel, theNetherlands (a); Herkenbosch, theNetherlands (b); Falmignoul, Belgium (c); andGroot-Genhout, Beek, theNetherlands (d) (see Fig. 1f for the location of each point). The red, yellow and black lines represent the predictiontime series with respectively one-month, three-month and four-mouth measurement update intervals. The lowermost one (e) is the comparison for the upscaled ht at the pixel 21 (seeFig. 1d for the location).
# &'
gro
un
dw
ater
hea
d (
m),
fro
m s
urf
ace
elev
atio
n
a
b
c
d
e
Fig. 8. Comparisons between predicted and measured groundwater head time series (blue dots) at several locations: Lennisheuvel, the Netherlands (a); Herkenbosch, the Netherlands(b); Falmignoul, Belgium (c); and Groot-Genhout, Beek, the Netherlands (d) (see Fig. 1f for the location of each point). Here, the predicted time series, indicated by red lines, havebeen obtained from transfer functionswithout anymeasurement update,while the black lines illustrate the confidence interval of the prediction. The lowermost one (e) is the comparisonfor the upscaled ht at the pixel 21 (see Fig. 1e for the location).
181E.H. Sutanudjaja et al. / Remote Sensing of Environment 138 (2013) 172–188

a b c
d e f
Fig. 9. Histograms of TFN model performance measured in ρTF, ME and MAE, respectively, for the prediction with every three-month measurement update (a, b, c) and with every four-month measurement update (d, e, f). Note that these are based on the validation run 2004–2007, the total number of stations is 2761 and a positive ME value indicates that an averageprediction is larger than an average measurement time series.
182 E.H. Sutanudjaja et al. / Remote Sensing of Environment 138 (2013) 172–188
Table 2— in whichwe sorted the data based on averagemeasured headdata — shows that better predictions are generally found in areas withshallower groundwater. The lower part of Table 2 shows the correlation
a b
Fig. 10.Histograms of TFN model performancemeasured in ρTF (a), ME (b), MAE (c) and MAEavalidation runs 2004–2007, the total number of stations is 2761 and a positive ME value indica
test results confirming this and corroborated by the 30 arc-minute aver-ages of point-scale ρTF in Fig. 11a showing significant positive correla-tions between performance and groundwater head (Fig. 1d).
c d
no (d), for the predictions without measurement updates. Note that these are based on thetes that an average prediction is larger than an average measurement time series.

ττ
$
τ
$
τ
$%'($
$
τ
$
-
0
-
0
-
0
a b c d
Fig. 11. 30 arc-minute pixel averages of TFNmodel performancemeasured inρTF (a),ME (b),MAE (c) andMAEano (d) for the predictionwithout anymeasurement updates.We showonlythe pixel average values calculated from at least 15 point-scale values. The upper yellow boxes contain the correlation coefficients of the field values to averagemeasured heads (Fig. 1d):Pearson's correlation (rp), Spearman's rho (rs) and Kendall's tau (τk) coefficients. The lower yellow boxes contain their corresponding p-values.
183E.H. Sutanudjaja et al. / Remote Sensing of Environment 138 (2013) 172–188
4.3. Spatio-temporal prediction of groundwater head
The fitted regression models for estimating δ1 and (havg − c) areshown in Fig. 12a and b, respectively. The background illustratesthe number of groundwater head stations with values in each bin —
i.e. the values of HAND and the calibrated values of δ1 and (havg − c)as obtained from the previous “temporal forecasting” exercise
Table 2Results of the temporal forecasting of 30 arc-minute scale ht time series. The information is ord
Pixel codes Number ofstations
havg(m)
1-month updates 3-month updates
ρTF ME(m)
MAE(m)
ρTF ME(m)
21 671 −1.47 0.88 0.06 0.10 0.84 0.0938 336 −1.93 0.90 0.06 0.10 0.80 0.1223 159 −2.30 0.67 0.01 0.12 0.60 0.0139 851 −2.65 0.88 0.04 0.10 0.79 0.0822 500 −2.85 0.86 0.05 0.10 0.85 0.08145 39 −3.15 0.70 0.01 0.07 0.71 0.00129 15 −3.47 0.59 0.06 0.13 0.46 0.07144 33 −3.55 0.84 0.00 0.12 0.72 0.01128 41 −3.77 0.87 0.01 0.05 0.80 0.0140 312 −4.02 0.64 0.00 0.08 0.86 0.04112 187 −4.15 0.87 0.08 0.10 0.65 0.1295 142 −4.39 0.54 0.03 0.15 0.44 0.1292 19 −5.82 0.94 0.00 0.06 0.89 0.00162 25 −8.28 0.76 0.02 0.13 0.42 0.0482 18 −8.40 0.80 0.00 0.27 0.25 0.01100 20 −8.58 0.82 0.21 1.24 0.75 0.3880 29 −9.26 0.58 0.00 0.25 0.67 0.0757 20 −9.52 0.40 0.23 1.00 0.54 0.3177 27 −9.72 0.79 0.03 0.25 0.48 0.03118 132 −9.90 0.90 0.28 1.07 0.83 0.60161 50 −9.98 0.85 0.03 0.23 0.80 0.0376 24 −10.62 0.73 0.03 0.24 0.47 0.0775 21 −12.43 0.76 0.04 0.27 0.57 0.1656 307 −13.02 0.71 0.19 0.66 0.39 0.3997 42 −13.03 0.31 0.05 0.34 0.16 0.17117 262 −13.57 0.50 0.20 1.25 0.49 0.00181 19 −14.64 0.63 0.02 0.30 0.27 0.08101 24 −18.75 0.30 0.19 1.08 0.18 0.80102 19 −21.93 0.44 0.11 0.48 0.38 0.05164 20 −22.93 0.70 0.02 0.56 0.57 0.0390 22 −26.70 −0.10 0.04 6.54 0.20 0.67Correlations to havgPearson rp 0.67 −0.24 −0.62 0.64 −0.47
p-value ≤0.001 0.193 ≤0.001 ≤0.001 0.007Spearman rs 0.55 −0.22 −0.81 0.62 −0.28
p-value 0.002 0.23 ≤0.001 ≤0.001 0.131Kendall τk 0.42 −0.14 −0.60 0.44 −0.20
p-value 0.001 0.279 ≤0.001 ≤0.001 0.111
(Section 4.2). The points (denoted by black dots) are the values usedin fitting regression lines (denoted by black lines). They are takenfrom40 stations located in 18different 30 arc-minute pixels (maximumthree best stations in a 30 arc-minute pixel). Using the calibrated pa-rameters from these selected stations, the regression analyses providedthe following regression coefficients: for Eqs. (9) and (11) (andEq. (16)): A = 0.4137, B = 0.2432, C = 1.6832 and D = 0.5183. As
ered according to average groundwater head havg.
4-month updates No measurement updates
MAE(m)
ρTF ME(m)
MAE(m)
ρTF ME(m)
MAE(m)
MAEano(m)
0.13 0.77 0.11 0.15 0.79 0.17 0.18 0.120.16 0.73 0.10 0.15 0.65 0.04 0.15 0.150.12 0.74 0.07 0.12 0.72 0.01 0.11 0.110.14 0.77 0.11 0.17 0.80 0.39 0.39 0.130.13 0.82 0.08 0.14 0.87 0.32 0.32 0.110.08 0.62 0.02 0.08 0.73 0.12 0.14 0.080.16 0.59 0.07 0.14 0.49 0.28 0.29 0.150.16 0.70 0.01 0.16 0.75 0.06 0.17 0.170.06 0.84 0.02 0.05 0.78 0.25 0.25 0.060.07 0.44 0.00 0.12 0.77 0.23 0.23 0.070.15 0.71 0.14 0.16 0.41 0.43 0.44 0.120.20 0.52 0.03 0.15 0.10 0.00 0.20 0.200.08 0.89 0.01 0.09 0.80 0.03 0.12 0.110.19 0.52 0.06 0.19 −0.17 0.19 0.25 0.210.48 −0.09 0.05 0.55 −0.15 1.78 1.78 0.721.58 0.73 0.23 1.57 −0.08 0.73 1.39 1.780.24 0.51 0.05 0.34 0.39 1.35 1.35 0.281.13 0.44 0.66 1.37 −0.11 2.07 2.54 1.210.36 0.65 0.05 0.30 0.52 0.17 0.37 0.341.66 0.72 0.69 1.97 0.33 7.41 7.41 2.590.28 0.88 0.13 0.25 0.87 0.44 0.50 0.340.33 0.60 0.15 0.28 0.45 0.51 0.61 0.370.40 0.46 0.05 0.43 0.24 0.10 0.54 0.550.87 0.41 0.44 0.87 −0.39 0.09 0.89 0.870.39 −0.14 0.12 0.41 0.13 0.48 0.56 0.361.40 0.47 0.02 1.37 −0.19 3.51 3.51 1.620.45 0.44 0.06 0.35 −0.07 0.47 0.57 0.431.22 0.34 0.85 1.23 −0.05 4.14 4.14 1.260.54 0.06 0.15 0.68 −0.48 16.66 16.66 0.760.85 0.04 0.14 1.43 0.34 1.26 1.61 1.445.94 0.05 1.19 6.41 0.14 4.41 5.98 5.81
−0.65 0.70 −0.57 −0.67 0.62 −0.56 −0.60 −0.68≤0.001 ≤0.001 0.001 ≤0.001 ≤0.001 0.001 ≤0.001 ≤0.001−0.80 0.68 −0.43 −0.79 0.63 −0.62 −0.80 −0.81≤0.001 ≤0.001 0.016 ≤0.001 ≤0.001 ≤0.001 ≤0.001 ≤0.001−0.6 0.50 −0.28 −0.57 0.43 −0.43 −0.58 −0.61≤0.001 ≤0.001 0.029 ≤0.001 0.001 ≤0.001 ≤0.001 ≤0.001

Fig. 12. Regression models for estimating δ1 (a); and (havg − c) (b), based on the digitalelevation model (HAND, see Section 4.3). The points (indicated by black dots) are thevalues used in fitting regression lines (black lines). The background illustrates the numberof head stationswith values (in each bin) of HAND and the calibrated δ1 and (havg − c) asobtained from the temporal forecasting exercise discussed in Section 4.2.
184 E.H. Sutanudjaja et al. / Remote Sensing of Environment 138 (2013) 172–188
shown in Fig. 12, the regression models with HAND as predictor vari-able and constrained in their form by hydrological considerationsand internal consistency are limited in their ability to describe thevariability of δ1 and (havg − c). Here, it should also be noted that thepredictions are limited by the vertical accuracy of HydroSHEDS DEM,which is a derived product of Shuttle Radar Topography Mission(SRTM) DEM (http://www2.jpl.nasa.gov/srtm/), with a relative ac-curacy of b16 m (Berry, Garlick, & Smith, 2007; Gorokhovich &Voustianiouk, 2006; Shortridge & Messina, 2011). The limitation ofSRTM DEM also hampers the estimation of level c. Consequently,large prediction biases (ME) are expected and the absolute valuesof groundwater head are hardly predicted. Hence, the evaluation ofMAEano (from anomaly time series or after bias-correction) is pre-ferred over MAE.
Despite the limitation of the regression models used, the derivedtransfer function models are able to reproduce observed groundwaterhead variations for a subset of locations. An example of a good predic-tion is given in Fig. 13a, where the timing agreement between predictedandmeasured head time series is good, both for the periods 1995–2000(ρTF = 0.82) and 2004–2007 (ρTF = 0.80). In terms ofMAEano, the pre-diction errors are also good for both periods (MAEano = 0.21 m for1995–2000 and MAEano = 0.20 m for 2004–2007). The example inFig. 13b is a location with HAND = 0 m. In areas with HAND = 0 m,Eqs. (10), (11) and (16) give c = 0 m, δ1 = 0, havg = 0 m and ω0 =0 m. Consequently, the transfer functionmodel in these areas simulatesonly a constant value (which is the initial condition havg = 0 m). Clear-ly, this example reveals a disadvantage of the approachwhen applied to
locations that are very close to open surfacewater bodies (i.e. rivers andlakes). The example shown in Fig. 13c is a case in which timing of thepredicted and measured head time series agrees well (ρTF = 0.82 for1995–2000 and ρTF = 0.80 for 2004–2007), but the amplitude is off(MAEano = 1.52 m for 1995–2000 and MAEano = 1.56 m for 2004–2007). The model is not able to reproduce the measured large ampli-tude. For theprediction shown in Fig. 13d, an example of a deep ground-water head location, it is expected that the prediction would be poor.Fig. 14 summarizes the prediction performance across all observationlocations in case that TFN model parameters are estimated using thedigital elevation model (and no updates are performed). For the period1995–2000 (Fig. 14a), there are 3011 (69%) predictions with ρTF N 0.5and 1923 (44%) prediction with ρTF N 0.7; while for 2004–2007(Fig. 14c), there are 1376 (47%) stations with ρTF N 0.5 and 585 (20%)stations with ρTF N 0.7. For 1995–2000 (Fig. 14b), there are 2369(54%) stations with MAEano ≤ 0.25 m, while for 2004–2007 (Fig. 14d),we have 1901 (65%) stations with MAEano ≤ 0.25 m. Although the re-sults for ρTF are better in 1995–2000 (which is expected as this is thecalibration period of the temporal forecasting exercise), the predictionperformance in 2004–2007 is reasonable when the histograms of ρTFand MAEano (Fig. 14c and d) are compared to those from the temporalforecasting exercise (Fig. 10a and d, without measurement update).Note that the data shown are after bias-correction so that the resultsare comparable in terms of the ability to predict head variation, butnot its absolute levels.
In Fig. 15, the prediction performance indicators ρTF, ME, MAE, andMAEano of the period 1995–2000 and 2004–2007 are presented at 30arc-minute resolution. Clearly, the spatio-temporal prediction methodis not able to estimate the absolute value of groundwater levels (as indi-cated byME andMAE in Fig. 15b and c, and e and f). Yet, head variationin terms of timing (as indicated by ρTF in Fig. 15a and e) and amplitude(as indicated byMAEano in Fig. 15d andh) are reasonablywell predicted.The correlation tests between the field values and average measuredhead data (Fig. 1d) show that the predictions are generally better forshallow groundwater areas, as expected.
5. Conclusion and discussion
In this paper, we investigated the possibility of using the remotely-sensed soil moisture time series of SWI for predicting groundwaterhead at large scale.We found correlations between SWI and groundwa-ter head time series to be strong, particularly in areas with shallowgroundwater and correlations to increase when a time-lag is allowedfor areas with deep groundwater. Temporal predictions with TFNmodels reproduced observed groundwater head time series well atlocations with shallow groundwater levels, but results were poor fordeep groundwater areas. Although the spatio-temporal predictionmethod was not able to estimate the absolute value of groundwaterhead, head variation in terms of timing and amplitude was predictedreasonably well, in particular in areas with shallow groundwater.
The latter conclusion is important when judging the suitability of re-motely sensed soil moisture for groundwater assessment in ungaugedor data poor groundwater basins. As GRACE is only able to detect stor-age change, not absolute storage (without any additional information),SWI is only able to predict groundwater level variation, not its absolutelevel or depth either. However, SWI (25–50 km) can do so at muchhigher resolution than GRACE (400 km). The downside of SWI is thatit only works for areas with shallow groundwater, as shown here. Weexpect that predictions of absolute levels will improve in the futureif more accurate global digital elevation model becomes available. If ad-ditional information about absolute groundwater head can bederived—
e.g. by occasional groundwater head observations in piezometers or byconstruction of a groundwater flow model based on globally availabledatasets on surface elevation, lithology, soil type and land use(e.g. Sutanudjaja et al., 2011) — then SWI would certainly be useful tofurther improve model results by calibration and in an operational

a
b
c
d
Fig. 13. Comparisons between spatio-temporal predictions of groundwater heads (red lines) and observations (blue dots) at several locations: Lennisheuvel, the Netherlands(a); Herkenbosch, the Netherlands (b); Falmignoul, Belgium (c); and Groot-Genhout, Beek, the Netherlands (d) (see Fig. 2f for the location of each point). Here, each predicted time seriesis a result of a transfer function with parameters estimated by using a digital elevation model.
185E.H. Sutanudjaja et al. / Remote Sensing of Environment 138 (2013) 172–188
framework through data-assimilation. Here, GRACE and SWI data arecomplementary. GRACE is able to inform on storage variations for thewhole basin at lower resolution, whereas SWI informs at higher reso-lution on groundwater level variations in areas with shallow ground-water, i.e. the areas where groundwater matters for the surface energybalance, agriculture and ecosystem.
The SWI product used is only one of many available spaceborne soilmoisture time series. We refer to other products such as an improvedversion of SWI proposed by de Lange et al. (2008), who derived SWIusing a one-dimensional water flowmodel and incorporating the influ-ence of soil texture, or surface soil moisture products from other satel-lite missions, such as the Advanced Microwave Scanning Radiometer-Earth Observation System (AMSR-E, de Jeu & Owe, 2003; Njoku et al.,
a b
Fig. 14. Histograms of spatio-temporal prediction performance with transfer function with par2004–2007 (c); and MAEano (unit: m) for the periods 1995–2000 (b) and 2004–2007 (d). The2004–2007. Note that the histograms of ρTF also contain the “NA” bars for ρTF that cannot be c
2003) and Soil Moisture and Ocean Salinity (SMOS, Kerr et al., 2001,2010, 2012), aswell as the forthcoming soil moisturemission Soil Mois-ture Active Passive (SMAP, Entekhabi et al., 2010) (for an extensive list,see e.g. Wagner et al., 2007; Wanders et al., 2012).
The current study is still limited by two relatively short periods ofspaceborne soil moisture observations (1995–2000 and 2004–2007).Yet, there is a recent project, referred as Water Cycle MultimissionObservation Strategy (WACMOS, http://wacmos.itc.nl), to set up asolid scientific basis for the creation of coherent long-term datasets ofwater relevant geo-information, including a harmonized soil moisturedataset from all microwave sensors. Within WACMOS, it is foreseenthat a multi-decadal (more than 30 years) soil moisture dataset inte-grating all microwave observations that are available since 1978 will
c d
ameters estimated using a digital elevation model: ρTF for the periods 1995–2000 (a) andre are 4387 stations used for the period 1995–2000 and 2925 stations used for the periodalculated in the pixels with HAND = 0.

ττ τ τ τ
)
,
)
,
)
,
τ τ τ τ
)
,
)
,
)
,
a b c d
e f g h
Fig. 15. 30 arc-minute pixel averages of TFNmodel performancemeasured inρTF, ME,MAE andMAEano for the spatio-temporal predictionwithmodel parameters estimated using a digitalelevation model: for the periods 1995–2000 (a, b, c, d) and 2004–2007 (e, f, g, h). We show only the pixel average values calculated from at least 15 point-scale values. The upper yellowboxes contain the correlation coefficients of the field values to average measured heads (Fig. 1d): Pearson's correlation (rp), Spearman's rho (rs) and Kendall's tau (τk) coefficients. Thelower yellow boxes contain their corresponding p-values.
186 E.H. Sutanudjaja et al. / Remote Sensing of Environment 138 (2013) 172–188
be created (see also Liu et al., 2011). If such a dataset is available, its im-plementation in a TFNmodeling framework for relating it to groundwa-ter head prediction will be interesting for groundwater studies.
Obviously, the TFN approach laid out in this paper requires the avail-ability of groundwater head measurement time series to calibrate theTFNmodels. Related to this issue,we suggest that futurefield campaignsof in-situ soil moisture observations, which will always be needed forthe validation of remote sensing soil moisture observations, must besupported by groundwater head measurements. Rephrasing Becker(2006): it is a pity that there is still a lack of communication betweensoil moisture scientists and hydro-geologists, which is illustratedby the fact that hundreds of soil moisture samples were collected todepths of 1 m during the field campaign of Soil Moisture Experiments(SMEX, http://www.ars.usda.gov) but depths to water table were notmonitored. Another example of this schism could be illustrated byseveral studies using the REMEDHUS soil moisture station network(e.g. Ceballos, Scipal, Wagner, & Martínez-Fernández, 2005; Martínez-Fernández & Ceballos, 2005) where groundwater head measurementsare not mentioned. Also, the recently started project International SoilMoisture Network (Dorigo et al., 2011) does not incorporate anygroundwater head measurements. If such soil moisture observationsand datasets are supported by groundwater headmeasurements, an ex-tension of a remotely sensed soil moisture product to groundwater re-lated information is possible as shown in this study.
Acknowledgements
We are grateful to the three anonymous reviewers for their con-structive comments that greatly improved the manuscript. This studyis funded by the Netherlands Organization for Scientific ResearchNWO (contract: SRON GO-AO/10). We acknowledge the Microwave
Remote Sensing Group of Institute of Photogrammetry and RemoteSensing, Vienna University of Technology, Austria (IPF TU Wien,http://www.ipf.tuwien.ac.at/radar) for providing the ERS SWI data.We are also indebted to many institutions that provided groundwaterhead data, such as the central portal to Data and Information of thesub-surface of the Netherlands (DINOLoket, http://www.dinoloket.nl); the Flanders sub-soil database, Belgium (DOV, http://dov.vlaanderen.be); the Wallonia Operational Directorate-General forAgriculture, Natural Resources and the Environment, Belgium(DGARNE, http://environnement.wallonie.be); the BRGM French Geo-logical Survey (the French Groundwater National Portal, http://www.ades.eaufrance.fr); the Baden-Württemberg State Environment Agency,Germany (LUBW, http://www.lubw.baden-wuerttemberg.de); theRhineland-Palatinate State Environment Agency, Germany (LUWGRheinland Pfalz, http://www.luwg.rlp.de); the North Rhine WestphaliaState Environment Agency, Germany (LANUVNRW, http://www.lanuv.nrw.de); the Bavarian Environment Agency, Germany (BayerischesLfU, http://www.lfu.bayern.de); the National Groundwater Monitor-ing NAQUA of the Swiss Federal Office for the Environment FOEN(http://www.bafu.admin.ch); and the AWEL Office for Waste, Water,Energy and Air of the Canton Zurich, Switzerland (http://www.awel.zh.ch); and some individuals, such as Harrie-Jan Hendricks-Franssenand Sebastian Stoll. We also thank the Unit Soil and GroundwaterSystems, Deltares, Utrecht, The Netherlands that allowed us to use thesoftware “METRAN” (Berendrecht et al., 2003) for TFN modeling.
References
Alkhaier, F., Flerchinger, G. N., & Su, Z. (2012). Shallow groundwater effect on land surfacetemperature and surface energy balance under bare soil conditions:Modeling and de-scription. Hydrology and Earth System Sciences, 16(7), 1817–1831. http://dx.doi.org/10.5194/hess-16-1817-2012.

187E.H. Sutanudjaja et al. / Remote Sensing of Environment 138 (2013) 172–188
Alkhaier, F., Su, Z., & Flerchinger, G. N. (2012). Reconnoitering the effect of shallowgroundwater on land surface temperature and surface energy balance using MODISand SEBS. Hydrology and Earth System Sciences, 16(7), 1833–1844. http://dx.doi.org/10.5194/hess-16-1833-2012.
Bastiaanssen, W. G. M., Menenti, M., Feddes, R. A., & Holtslag, A. A.M. (1998). A remotesensing surface energy balance algorithm for land (SEBAL). 1. Formulation. Journalof Hydrology, 212-213, 198–212. http://dx.doi.org/10.1016/S0022-1694(98)00253-4.
Becker, M. W. (2006). Potential for satellite remote sensing of ground water. GroundWater, 44(2), 306–318. http://dx.doi.org/10.1111/j.1745-6584.2005.00123.x.
Berendrecht, W., Heemink, A., van Geer, F., & Gehrels, J. (2003). Decoupling of modelingand measuring interval in groundwater time series analysis based on response char-acteristics. Journal of Hydrology, 278(14), 1–16. http://dx.doi.org/10.1016/S0022-1694(03)00075-1.
Berry, P., Garlick, J., & Smith, R. (2007). Near-global validation of the SRTM DEMusing satellite radar altimetry. Remote Sensing of Environment, 106(1), 17–27.http://dx.doi.org/10.1016/j.rse.2006.07.011.
Bierkens, M. F. P., Knotters, M., & Hoogland, T. (2001). Space-timemodeling of water tabledepth using a regionalized time series model and the Kalman filter. Water ResourcesResearch, 37(5), 1277–1290. http://dx.doi.org/10.1029/2000WR900353.
Bierkens, M. F. P., Knotters, M., & van Geer, F. C. (1999). Calibration of transfer function-noise models to sparsely or irregularly observed time series. Water Resources Re-search, 35(6), 1741–1750. http://dx.doi.org/10.1029/1999WR900083.
Bierkens,M. F., & te Stroet, C. B. (2007).Modellingnon-linearwater table dynamics and spe-cific discharge through landscape analysis. Journal of Hydrology, 332(34), 412–426.http://dx.doi.org/10.1016/j.jhydrol.2006.07.011.
Box, G. E. P., & Jenkins, G. M. (1976). Time series analysis: Forecasting and control. SanFrancisco: Holden-Day.
Ceballos, A., Scipal, K., Wagner, W., & Martnez-Fernndez, J. (2005). Validation of ERSscatterometer-derived soil moisture data in the central part of the Duero Basin,Spain. Hydrological Processes, 19(8), 1549–1566. http://dx.doi.org/10.1002/hyp.5585.
de Jeu, R. A.M., & Owe, M. (2003). Further validation of a new methodology for surfacemoisture and vegetation optical depth retrieval. International Journal of Remote Sens-ing, 24(22), 4559–4578. http://dx.doi.org/10.1080/0143116031000095934.
de Lange, R., Beck, R., van de Giesen, N., Friesen, J., de Wit, A., & Wagner, W. (2008).Scatterometer-derived soil moisture calibrated for soil texture with a one-dimensional water-flow model. IEEE Transactions on Geoscience and Remote Sensing,46(12), 4041–4049. http://dx.doi.org/10.1109/TGRS.2008.2000796.
de Wit, M., van den Hurk, B., Warmerdam, P., Torfs, P., Roulin, E., & van Deursen, W.(2007). Impact of climate change on low-flows in the river Meuse. Climatic Change,82(3-4), 351–372. http://dx.doi.org/10.1007/s10584-006-9195-2.
Dorigo, W. A., Wagner, W., Hohensinn, R., Hahn, S., Paulik, C., Xaver, A., et al. (2011). TheInternational Soil Moisture Network: A data hosting facility for global in situ soilmoisture measurements. Hydrology and Earth System Sciences, 15(5), 1675–1698,http://www.hydrol-earth-syst-sci.net/15/1675/2011/.
Drinkwater, M. R., Floberghagen, R., Haagmans, R., Muzi, D., & Popescu, A. (2003). GOCE:ESA's first Earth Explorer Core mission. In G. B. Beutler, M. R. Drinkwater, R. Rummel,& R. von Steiger (Eds.), Earth gravity field from space — From sensors to earth sciences.Space Sciences Series, Vol. 18. (pp. 419–432). Dordrecht, The Netherlands: Kluwer Ac-ademic Publishers.
Drinkwater, M. R., Haagmans, R., Muzi, D., Popescu, A., Floberghagen, R., Kern, M., et al.(2007). The GOCE gravity mission: ESA's First Core Earth Explorer. Proceedings ofthe 3rd International GOCE User Workshop, 6–8 November 2006, Frascati, Italy, ESASP-627 (pp. 1–8).
Dürr, H. H.,Meybeck,M., &Dürr, S. H. (2005). Lithologic composition of the Earth's continen-tal surfaces derived from a new digital map emphasizing riverine material transfer.Global Biogeochemical Cycles, 19(4), GB4S10. http://dx.doi.org/10.1029/2005GB002515.
Entekhabi, D., Njoku, E., O'Neill, P., Kellogg, K., Crow, W., Edelstein, W., et al. (2010).The Soil Moisture Active Passive (SMAP) mission. Proceedings of the IEEE, 98(5),704–716. http://dx.doi.org/10.1109/JPROC.2010.2043918.
Ernst, L. F. (1956). Calculation of the steady flow of groundwater in vertical cross sections.Netherlands Journal of Agricultural Science, 4, 126–131.
Gehrels, J., van Geer, F., & de Vries, J. (1994). Decomposition of groundwater level fluctua-tions using transfer modelling in an area with shallow to deep unsaturated zones. Jour-nal of Hydrology, 157(1-4), 105–138. http://dx.doi.org/10.1016/0022-1694(94)90101-5.
Gharari, S., Hrachowitz, M., Fenicia, F., & Savenije, H. H. G. (2011). Hydrological landscapeclassification: investigating the performance of hand based landscape classificationsin a central European meso-scale catchment. Hydrology and Earth System Sciences,15(11), 3275–3291. http://dx.doi.org/10.5194/hess-15-3275-2011.
Gill, P. E., Murray,W., &Wright,M. H. (1981). Practical optimization. London: Academic Press.Gleeson, T., Wada, Y., Bierkens, M. F. P., & van Beek, L. P. H. (2012). Water balance of
global aquifers revealed by groundwater footprint. Nature, 488(7410), 197–200.http://dx.doi.org/10.1038/nature11295.
Gorokhovich, Y., & Voustianiouk, A. (2006). Accuracy assessment of the processedSRTM-based elevation data by CGIAR using field data from USA and Thailand andits relation to the terrain characteristics. Remote Sensing of Environment, 104(4),409–415. http://dx.doi.org/10.1016/j.rse.2006.05.012.
Hubbert, M. K. (1940). The theory of ground-water motion. Journal of Geology, 48(8),785–944.
Immerzeel,W.W., Droogers, P., de Jong, S.M., & Bierkens,M. F. P. (2009). Large-scalemon-itoring of snow cover and runoff simulation in Himalayan river basins using remotesensing. Remote Sensing of Environment, 113(1), 40–49. http://dx.doi.org/10.1016/j.rse.2008.08.010.
Jackson, T. J. (2002). Remote sensing of soil moisture: Implications for groundwater re-charge.Hydrogeology Journal, 10, 40–51. http://dx.doi.org/10.1007/s10040-001-0168-2.
Jackson, T. J. (2006). Estimation of surface soil moisture using microwave sensors. Ency-clopedia of Hydrological Sciences. http://dx.doi.org/10.1002/0470848944.hsa060.
Jackson, T. J., Schmugge, J., & Engman, E. T. (1996). Remote sensing applications to hydrol-ogy: Soil moisture. Hydrological Sciences, 41(4), 517–530.
Jung, M., Reichstein, M., Ciais, P., Seneviratne, S. I., Sheffield, J., Goulden, M. L., et al. (2010).Recent decline in the global land evapotranspiration trend due to limited moisturesupply. Nature, 467(7318), 951–954. http://dx.doi.org/10.1038/nature09396.
Kerr, Y., Waldteufel, P., Richaume, P., Wigneron, J., Ferrazzoli, P., Mahmoodi, A., et al.(2012). The SMOS soil moisture retrieval algorithm. IEEE Transactions on Geoscienceand Remote Sensing, 50(5), 1384–1403.
Kerr, Y., Waldteufel, P., Wigneron, J., Delwart, S., Cabot, F., Boutin, J., et al. (2010). TheSMOS mission: New tool for monitoring key elements of the global water cycle. Pro-ceedings of the IEEE, 98(5), 666–687.
Kerr, Y., Waldteufel, P., Wigneron, J. -P., Martinuzzi, J., Font, J., & Berger, M. (2001). Soilmoisture retrieval from space: The Soil Moisture and Ocean Salinity (SMOS) mission.IEEE Transactions on Geoscience and Remote Sensing, 39(8), 1729–1735.
Knotters, M., & Bierkens, M. F. P. (2000). Physical basis of time series models for watertable depths. Water Resources Research, 36(1), 181–188. http://dx.doi.org/10.1029/1999WR900288.
Knotters, M., & Bierkens, M. F. P. (2001). Predicting water table depths in space and timeusing a regionalised time series model. Geoderma, 103(12), 51–77. http://dx.doi.org/10.1016/S0016-7061(01)00069-6.
Kummerow, C., Simpson, J., Thiele, O., Barnes, W., Chang, A. T. C., Stocker, E., et al. (2000).The status of the Tropical Rainfall MeasuringMission (TRMM) after two years in orbit.Journal of Applied Meteorology, 39(12), 1965–1982. http://dx.doi.org/10.1175/1520-0450(2001)040b1965:TSOTT RN2.0.CO;2.
Lehner, B., & Döll, P. (2004). Development and validation of a global database of lakes, res-ervoirs andwetlands. Journal of Hydrology, 296(1-4), 1–22. http://dx.doi.org/10.1016/j.jhydrol.2004.03.028.
Lehner, B., Verdin, K., & Jarvis, A. (2008). New global hydrography derived fromspaceborne elevation data. Eos, 89(10). http://dx.doi.org/10.1029/2008EO100001.
Liu, Y. Y., Parinussa, R. M., Dorigo, W. A., De Jeu, R. A.M., Wagner, W., van Dijk, A. I. J. M.,et al. (2011). Developing an improved soil moisture dataset by blending passiveand active microwave satellite-based retrievals. Hydrology and Earth System Sciences,15(2), 425–436 (URL http://www.hydrol-earth-syst-sci.net/15/425/2011/).
Martínez-Fernández, J., & Ceballos, A. (2005). Mean soil moisture estimation using tem-poral stability analysis. Journal of Hydrology, 312(14), 28–38. http://dx.doi.org/10.1016/j.jhydrol.2005.02.007.
Mu, Q., Heinsch, F. A., Zhao, M., & Running, S. W. (2007). Development of a globalevapotranspiration algorithm based on MODIS and global meteorology data.Remote Sensing of Environment, 111(4), 519–536. http://dx.doi.org/10.1016/j.rse.2007.04.015.
Njoku, E., Jackson, T., Lakshmi, V., Chan, T., & Nghiem, S. (2003). Soil moisture retrievalfrom AMSR-E. IEEE Transactions on Geoscience and Remote Sensing, 41(2), 215–229.http://dx.doi.org/10.1109/TGRS.2002.808243.
Nobre, A., Cuartas, L., Hodnett, M., Renn, C., Rodrigues, G., Silveira, A., et al. (2011). Heightabove the nearest drainage— A hydrologically relevant new terrain model. Journal ofHydrology, 404(12), 13–29. http://dx.doi.org/10.1016/j.jhydrol.2011.03.051.
Rennó, C. D., Nobre, A.D., Cuartas, L. A., Soares, J. V., Hodnett, M. G., Tomasella, J., et al.(2008). HAND, a new terrain descriptor using SRTM-DEM: Mapping terra-firmerainforest environments in Amazonia. Remote Sensing of Environment, 112(9),3469–3481. http://dx.doi.org/10.1016/j.rse.2008.03.018.
Rodell, M., Chen, J., Kato, H., Famiglietti, J., Nigro, J., & Wilson, C. (2007). Estimatinggroundwater storage changes in the Mississippi River basin (USA) using GRACE.Hydrogeology Journal, 15, 159–166. http://dx.doi.org/10.1007/s10040-006-0103-7.
Rodell, M., Velicogna, I., & Famiglietti, J. S. (2009). Satellite-based estimates of ground-water depletion in India. Nature, 460(7258), 999–1002. http://dx.doi.org/10.1038/nature08238.
Savenije, H. H. G. (2010). HESS opinions “Topography driven conceptual model-ling (FLEX-Topo)”. Hydrology and Earth System Sciences, 14(12), 2681–2692.http://dx.doi.org/10.5194/hess-14-2681-2010.
Scipal, K., Scheffler, C., & Wagner, W. (2005). Soil moisture-runoff relation at the catch-ment scale as observed with coarse resolution microwave remote sensing. Hydrologyand Earth System Sciences, 9(3), 173–183 (http://www.hydrol-earth-syst-sci.net/9/173/2005/).
Shortridge, A., & Messina, J. (2011). Spatial structure and landscape associations of SRTMerror. Remote Sensing of Environment, 115(6), 1576–1587. http://dx.doi.org/10.1016/j.rse.2011.02.017.
Strassberg, G., Scanlon, B. R., & Chambers, D. (2009). Evaluation of groundwater storagemonitoring with the GRACE satellite: Case study of the High Plains aquifer, centralUnited States. Water Resources Research, 45(5), W05410. http://dx.doi.org/10.1029/2008WR006892.
Su, Z. (2002). The Surface Energy Balance System (SEBS) for estimation of turbulent heatfluxes. Hydrology and Earth System Sciences, 6(1), 85–100. http://dx.doi.org/10.5194/hess-6-85-2002.
Sutanudjaja, E. H., van Beek, L. P. H., de Jong, S. M., van Geer, F. C., & Bierkens, M. F. P.(2011). Large-scale groundwater modeling using global datasets: A test case forthe Rhine–Meuse basin. Hydrology and Earth System Sciences, 15(9), 2913–2935.http://dx.doi.org/10.5194/hess-15-2913-2011.
Swenson, S., Famiglietti, J., Basara, J., &Wahr, J. (2008). Estimating profile soilmoisture andgroundwater variations using GRACE and Oklahoma Mesonet soil moisture data.Water Resources Research, 44(1),W01413. http://dx.doi.org/10.1029/2007WR006057.
Tapley, B.D., Bettadpur, S., Ries, J. C., Thompson, P. F., & Watkins, M. M. (2004). GRACEmeasurements of mass variability in the earth system. Science, 305(5683), 503–505.http://dx.doi.org/10.1126/science.1099192.
Tóth, J. (1962). A theory of groundwatermotion in small drainage basins in Central Alberta,Canada. Journal of Geophysical Research, 67(11), 4375–4388. http://dx.doi.org/10.1029/JZ067i011p04375.

188 E.H. Sutanudjaja et al. / Remote Sensing of Environment 138 (2013) 172–188
vanGeer, F. C. (1987).Applications of Kalman filtering in the analysis anddesign of groundwatermonitoring networks. (Ph.D. thesis). The Netherlands: Delft University of Technology.
van Geer, F. C., & Defize, P. (1987). Detection of natural and artificial causes of groundwa-ter fluctuations. IAHS Publication, 168, 597–606.
van Geer, F. C., & te Stroet, C. B.M. (1990). A Kalman filter approach to the quantificationof the reliability of a groundwater model. IAHS Publication, 195, 467–476.
van Geer, F. C., te Stroet, C. B.M., & Yangxiao, Z. (1991). Using Kalman filtering to improveand quantify the uncertainty of numerical groundwater simulations: 1. The roleof system noise and its calibration. Water Resources Research, 27(8), 1987–1994.http://dx.doi.org/10.1029/91WR00509.
von Asmuth, J. R., Bierkens, M. F. P., & Maas, K. (2002). Transfer function-noise modelingin continuous time using predefined impulse response functions.Water Resources Re-search, 38(12), 1287. http://dx.doi.org/10.1029/2001WR001136.
von Asmuth, J. R., & Knotters, M. (2004). Characterising groundwater dynamics basedon a system identification approach. Journal of Hydrology, 296(14), 118–134.http://dx.doi.org/10.1016/j.jhydrol.2004.03.015.
Wada, Y., van Beek, L. P. H., van Kempen, C. M., Reckman, J. W. T. M., Vasak, S., & Bierkens,M. F. P. (2010). Global depletion of groundwater resources. Geophysical Research Let-ters, 37(20), L20402. http://dx.doi.org/10.1029/2010GL044571.
Wada, Y., van Beek, L. P. H., Viviroli, D., Dürr, H. H., Weingartner, R., & Bierkens, M. F. P.(2011). Global monthly water stress: 2. Water demand and severity of water stress.Water Resources Research, 47(7),W07518. http://dx.doi.org/10.1029/2010WR009792.
Wagner, W. (1998). Soil moisture retrieval from ERS scatterometer data. (Ph.D. thesis).Austria: Vienna University of Technology.
Wagner, W., Lemoine, G., Borgeaud, M., & Rott, H. (1999). A study of vegetation cover ef-fects on ERS scatterometer data. IEEE Transactions on Geoscience and Remote Sensing,37(2), 938–948.
Wagner, W., Lemoine, G., & Rott, H. (1999). A method for estimating soil moisture fromERS scatterometer and soil data. Remote Sensing of Environment, 70(2), 191–207.http://dx.doi.org/10.1016/S0034-4257(99)00036-X.
Wagner, W., Naeimi, V., Scipal, K., de Jeu, R., & Martínez-Fernández, J. (2007). Soilmoisture from operational meteorological satellites. Hydrogeology Journal, 15,121–131. http://dx.doi.org/10.1007/s10040-006-0104-6.
Wagner, W., Scipal, K., Pathe, C., Gerten, D., Lucht, W., & Rudolf, B. (2003). Evaluationof the agreement between the first global remotely sensed soil moisture datawith model and precipitation data. Journal of Geophysical Research, 108(D19),4611.
Wan, Z., & Li, Z. -L. (1997). A physics-based algorithm for retrieving land-surface emissiv-ity and temperature from EOS/MODIS data. IEEE Transactions on Geoscience and Re-mote Sensing, 35(4), 980–996. http://dx.doi.org/10.1109/36.602541.
Wanders, N., Karssenberg, D., Bierkens, M. F. P., Parinussa, R. M., de Jeu, R. A.M., van Dam,J., et al. (2012). Observation uncertainty of satellite soil moisture products deter-mined with physically-based modeling. Remote Sensing of Environment, 127(0),341–356. http://dx.doi.org/10.1016/j.rse.2012.09.004.